3.1. Simulation Model Validation
Validation of the simulation model denoted PropSim (2018) is carried out using model experiments performed by Koushan [
2] and Kozlowska et al. [
8]. These two experimental campaigns are referred to in this article by using acronyms: experiments reported by Koushan [
2]—
Kou2006_I, and experiments reported by Kozlowska et al. [
8]—
Koz17.
Kou2006_I experiments were performed on an open pulling propeller exposed to forced sinusoidal heave motion. Carriage speed
U and the propeller shaft frequency
n were varied in order to obtain different low advance numbers
J (around 0.1). In order to obtain more data for validation purposes in higher advance numbers,
Koz17 experiments were performed. The testing conditions are listed in
Table 1.
The same propeller model (P1374) was used for these experiments: the propeller has a diameter of 250 mm, design pitch ratio of 1.1, and expanded area ratio of 0.595. The propeller hub diameter is 65 mm.
The Kou2006_I experiments were conducted in the Marine Cybernetics Laboratories at the Norwegian University of Science and Technology. The tank is 40 m long, 6.45 m wide, and 1.5 m deep. Ventilation is generated by sinusoidal vertical motion of the propeller with different amplitudes. Blade axial, radial, tangential forces, and moments about all three axes were measured during the experiments. A pulse meter indicating the angular position of the reference blade.
The Koz17 experiments took place in the large towing tank at SINTEF Ocean in Trondheim, with dimensions (length × breadth × depth) of 260 m × 10.5 m × 5.6 m. The tests were performed at different submergence ratios and propeller rotational speeds. For each draught and propeller rotational speed, the propeller was tested at different advance numbers ranging from to . Different advance numbers were obtained at various propeller rotational speeds so that for the same advance numbers, different propeller thrusts were obtained, thus varying the Weber number . A conventional two components propeller open water dynamometer was used to measure propeller thrust and torque. The main purpose for these experiments was to obtain more data at higher advance numbers. Also, the different advance numbers were obtained at a range of propeller rotational speeds that, for the same advance number, different thrust coefficients were tested.
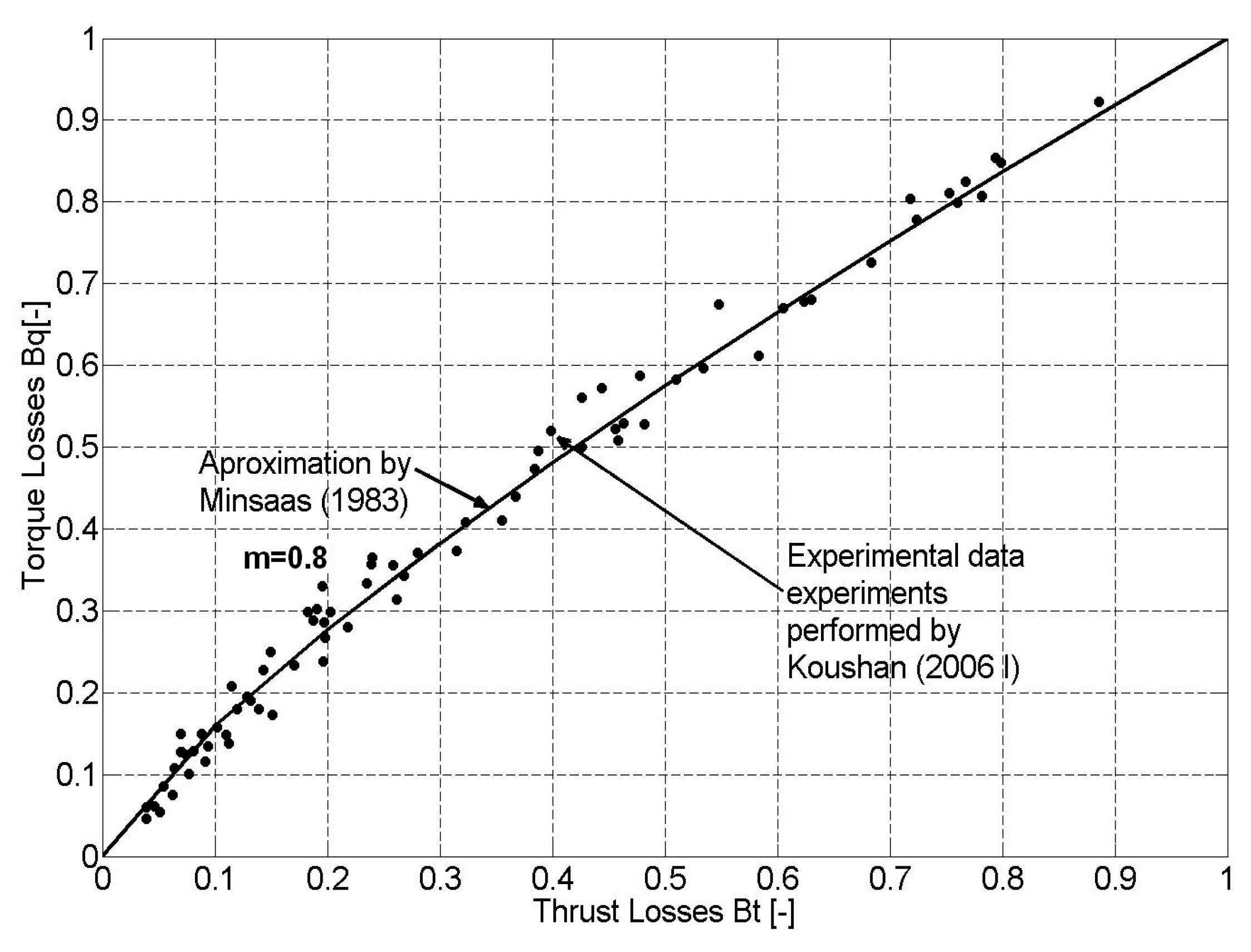
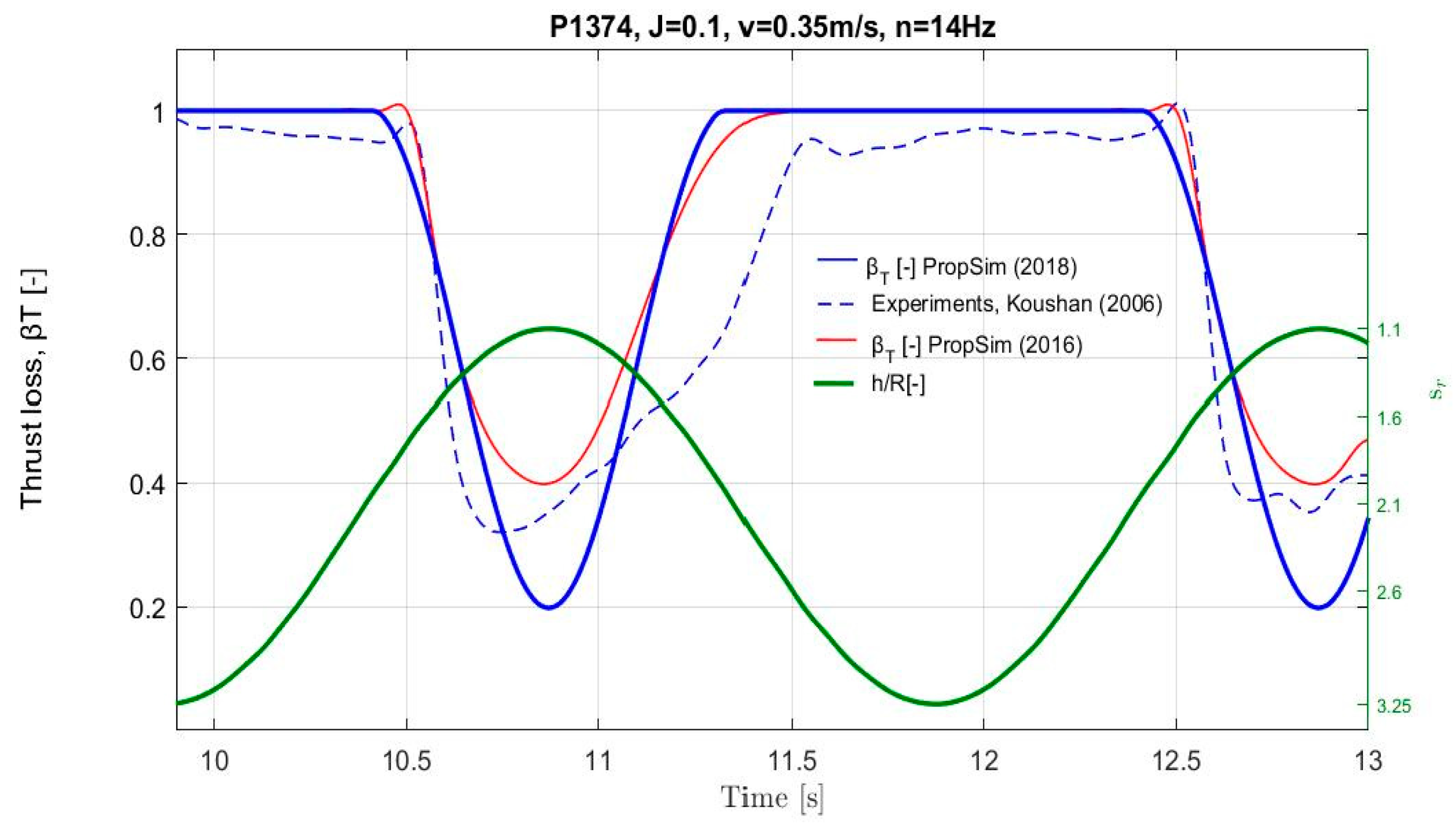
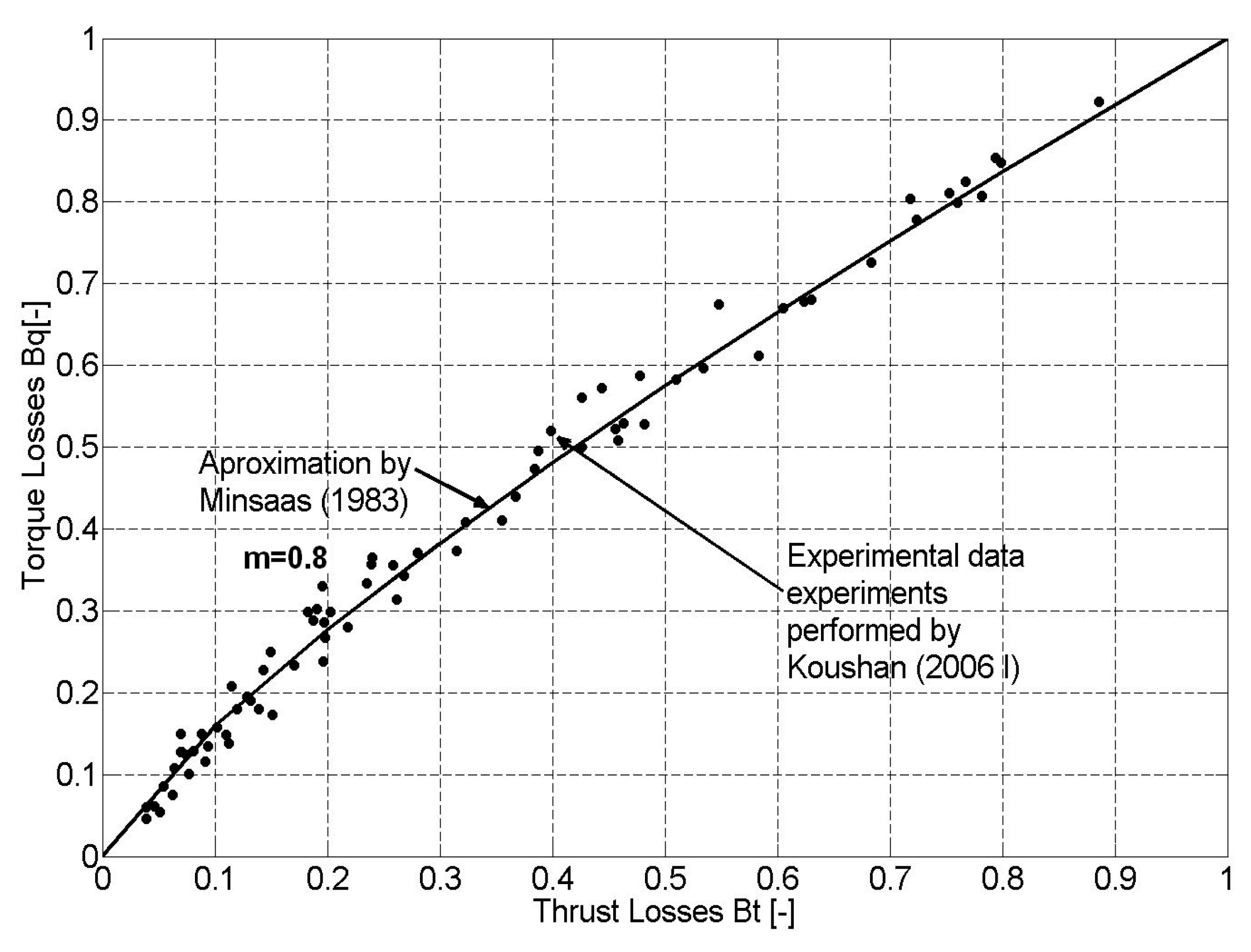
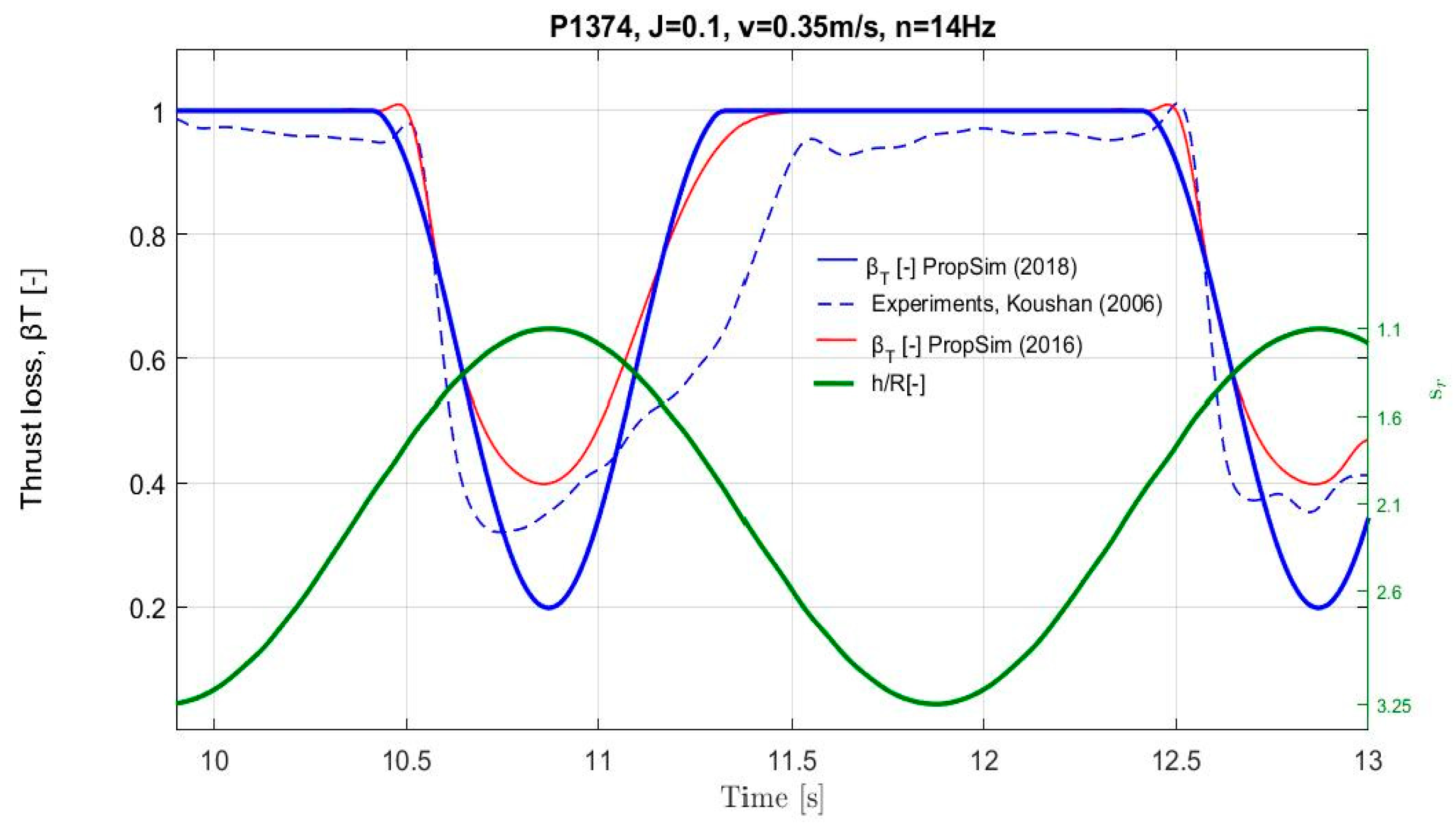
Figure 3 shows the comparison between a simulation performed by using PropSim (2016) and PropSim (2018) simulation models and experimental results,
Kou2006_I. PropSim (2016) model relates thrust loss to the estimated ventilated blade area using an empirical relation that is based on the same model experiments, as shown in
Figure 3 (
Kou2006_I). This is believed to be the reason why, for this particular case, the agreement between experimental results and calculation fitted better to the 2016 version of the simulation model.
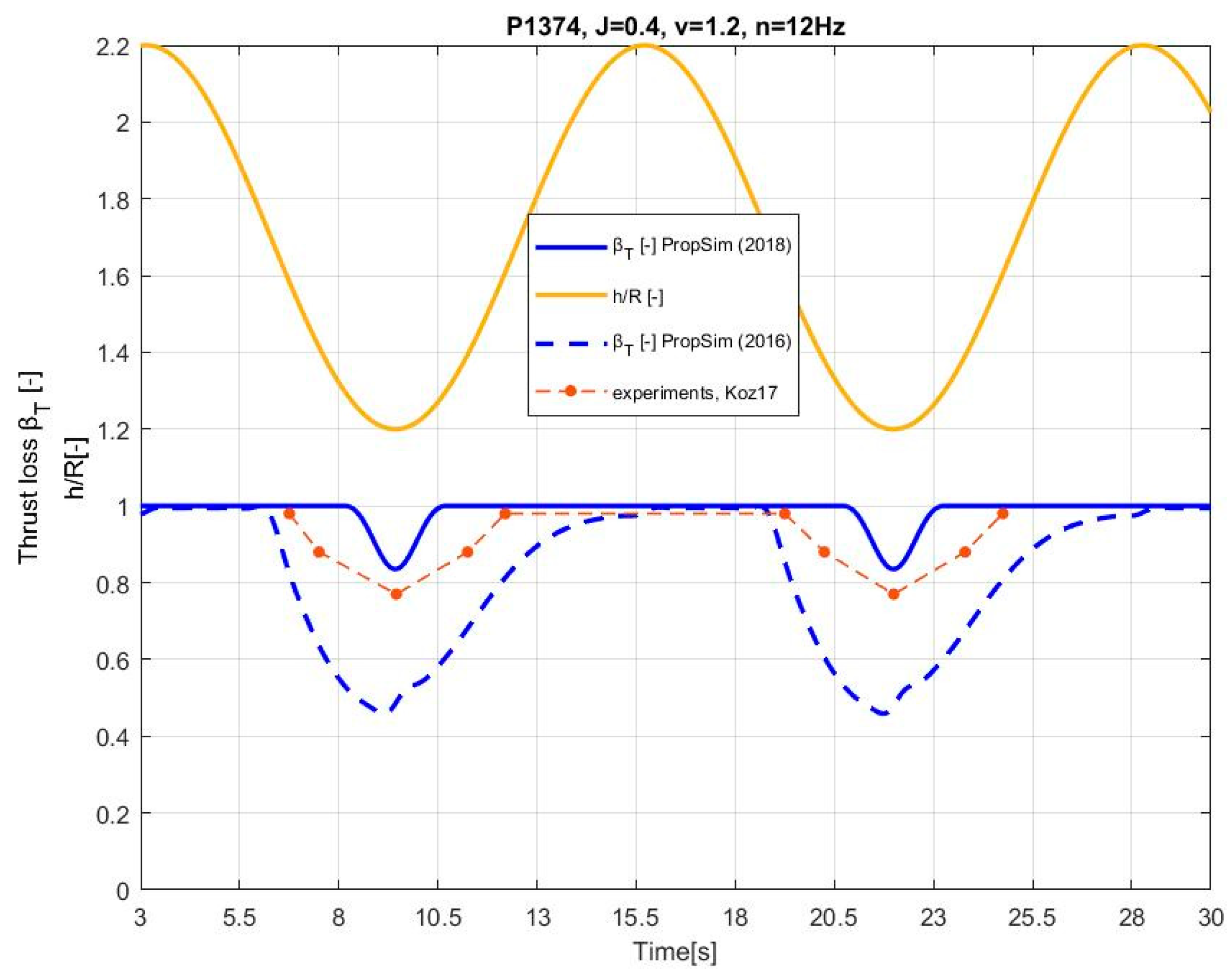
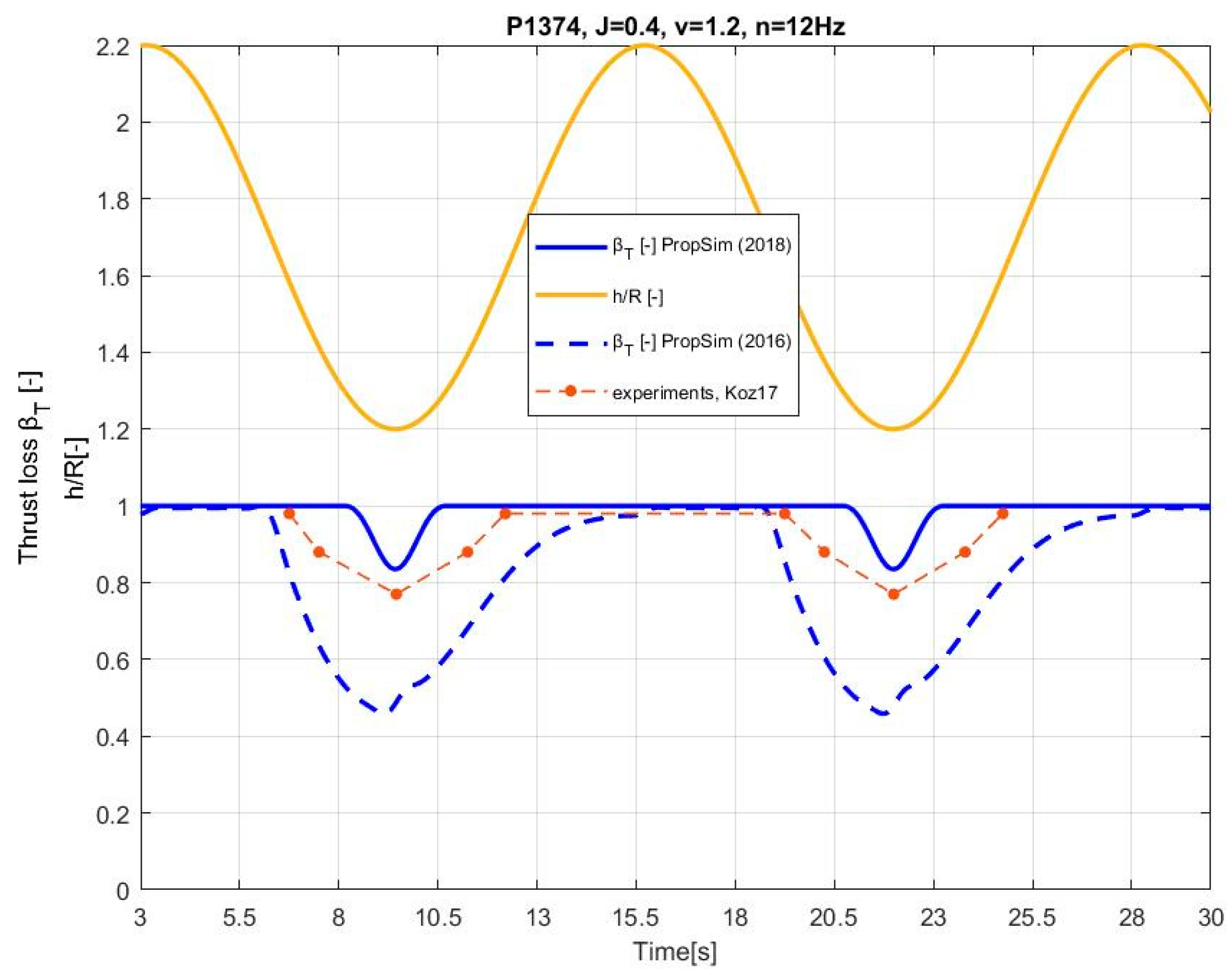
Figure 4 shows the comparison of thrust loss calculations using two different versions of the simulation model: PropSim (2016) and PropSim (2018). Propeller thrust loss is calculated for a propeller working at constant propeller revolutions
n = 12 Hz under dynamic heave motion conditions
for high advance number
J = 0.4. There are no experimental conditions testing propeller ventilation during dynamic heave motion for high advance numbers, thus for validation purposes, the simulation model results have to be compared with static conditions based on the
Koz17 experiments, implicitly assuming that the behavior is quasi-static. It can be observed from
Figure 4 that the thrust loss prediction agrees better with the calculations performed by using the simulation model PropSim (2018). The reason for this result is that the simulation model PropSim(2016) does not include the forward speed and propeller loading as a factor for calculating the blade area ratio
. Simulation model PropSim (2016) overestimated thrust losses due to ventilation. For example, for
h/
R = 1.2, the thrust loss due to ventilation is 0.84 based on the PropSim (2018) simulation model and in the range of 0.45–0.5 for the PropSim (2016) simulation model. The experimental measurements are equal to 0.78, which is closer to the updated simulation model PropSim (2018). The same behavior was observed for other submergence ratios
h/
R = 1.4, 1.6, and 2.0.
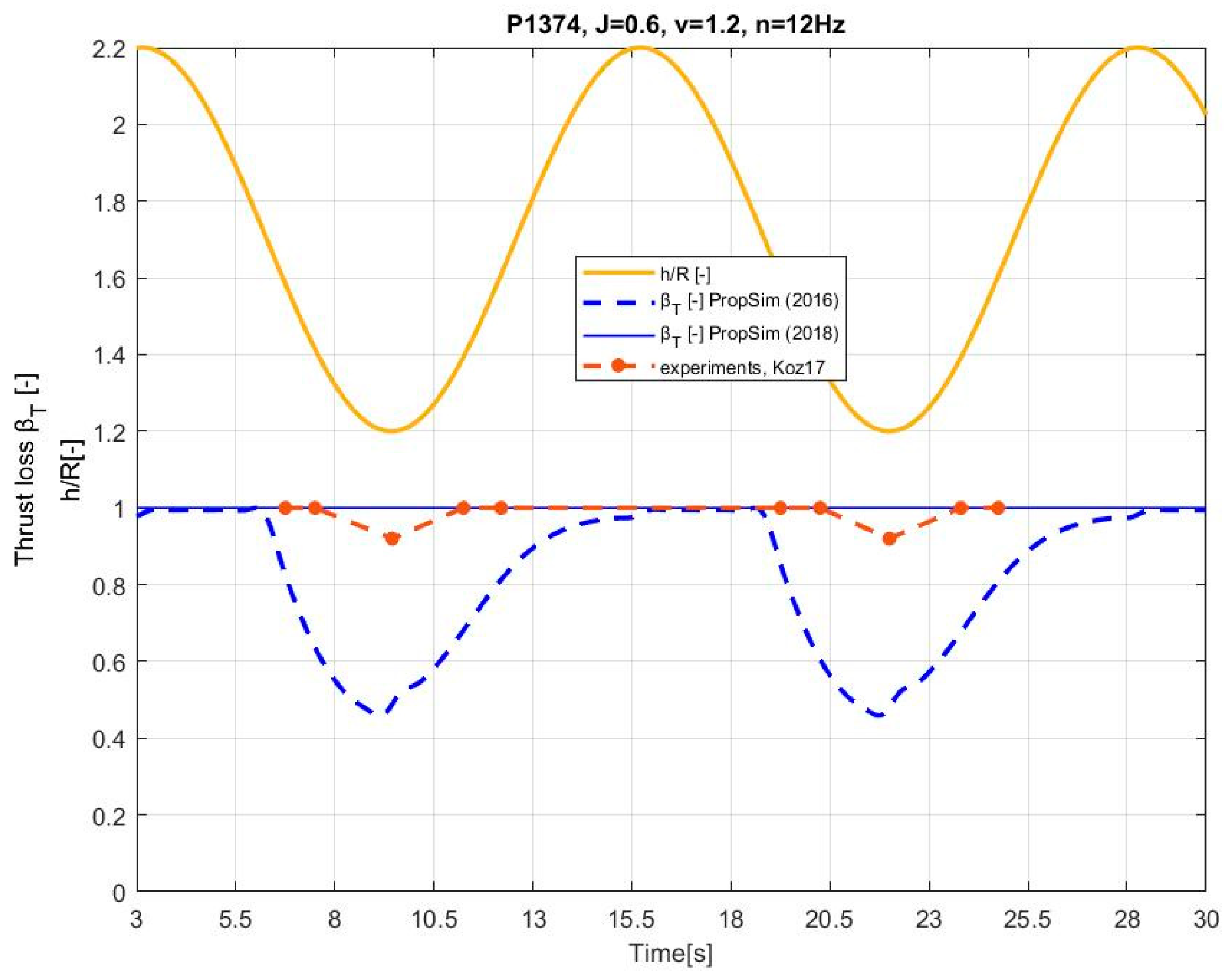
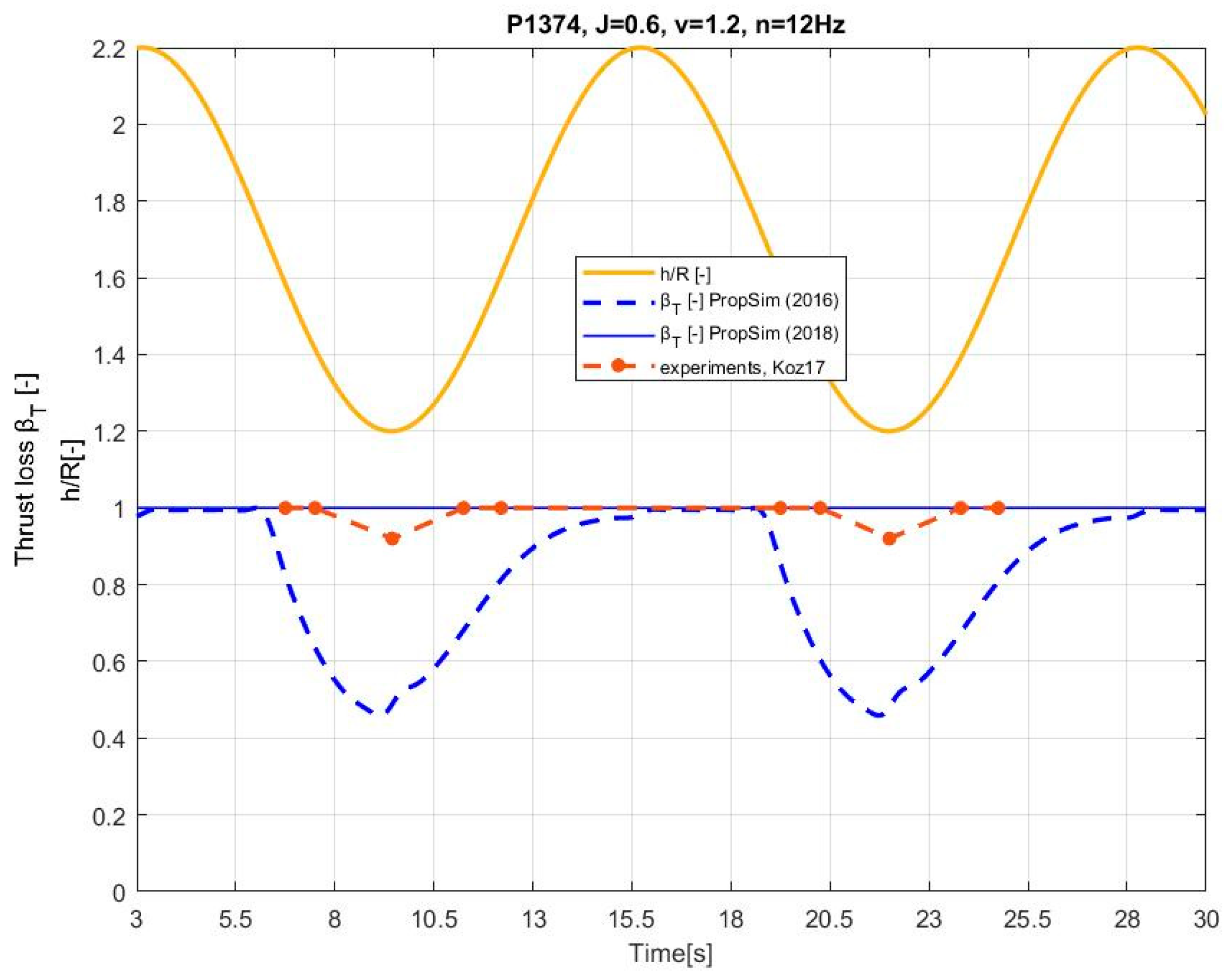
Figure 5 shows the comparison of thrust loss calculation using the PropSim (2016) and PropSim (2018) simulation model. Propeller thrust loss is calculated for the propeller working with constant propeller revolutions
n = 12 Hz under dynamic heave motion conditions
for the high advance number
J = 0.6. It can be observed from
Figure 5 that the thrust loss prediction agrees better with the calculation for the simulation model PropSim (2018). Simulation model PropSim (2016) overestimates thrust losses due to ventilation. For example, for
h/R = 1.2, the thrust loss due to ventilation is 1.0 based on the PropSim (2018) simulation model and is in the range of 0.45–0.5 for the PropSim (2016) simulation model. The experimental measurements are equal to 0.92, which is closer to the updated simulation model PropSim (2018). Also, experimental data based on experiments
Koz17 shows no thrust loss for
J = 0.6 for the submergence ratio
the same as predicted by using the PropSim (2018) simulation model.
3.2. Dynamic Effect Causing Hysteresis of the Thrust Loss during Heave Motion of the Propeller Calculated by PropSim (2018_hysteresis)
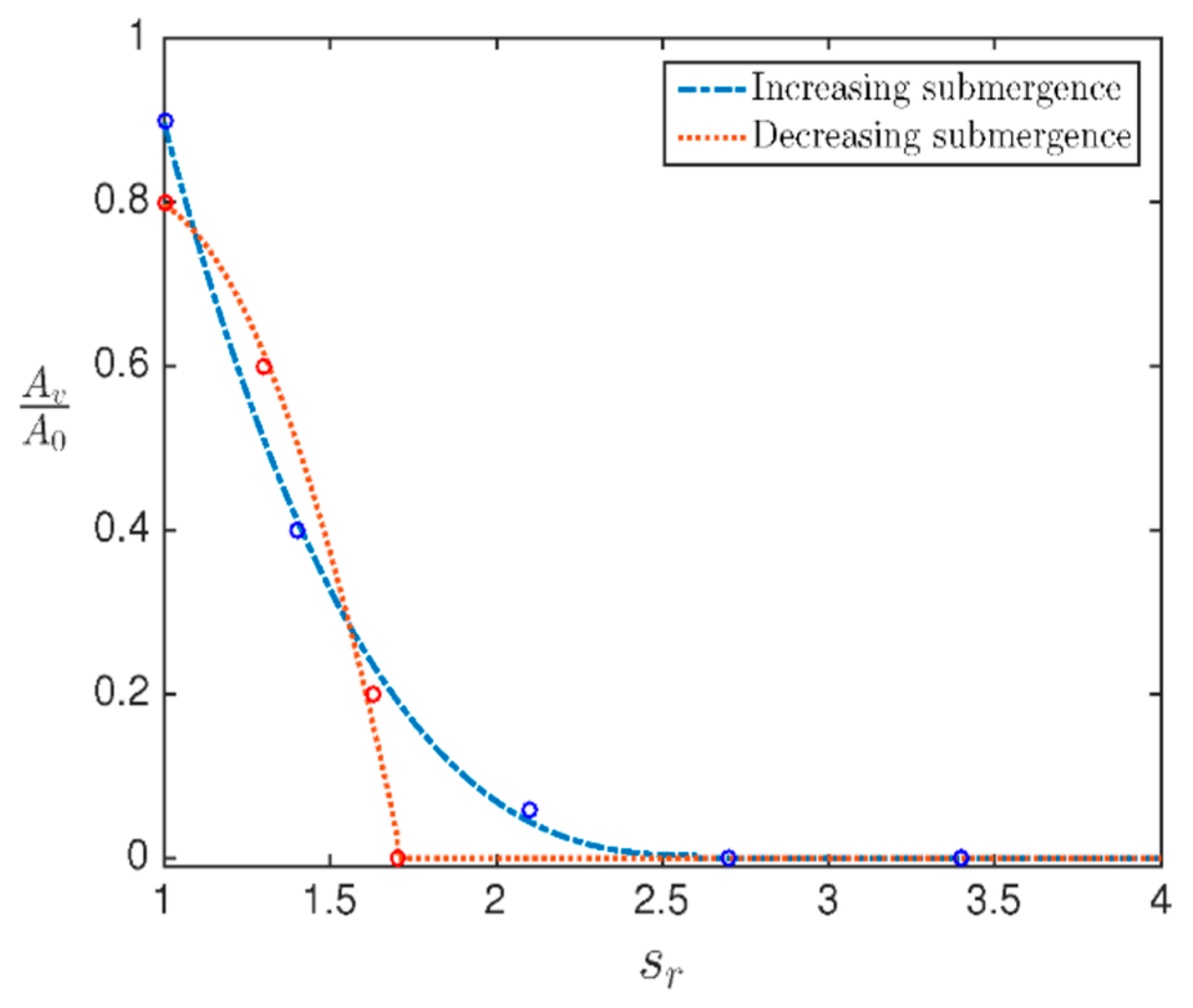
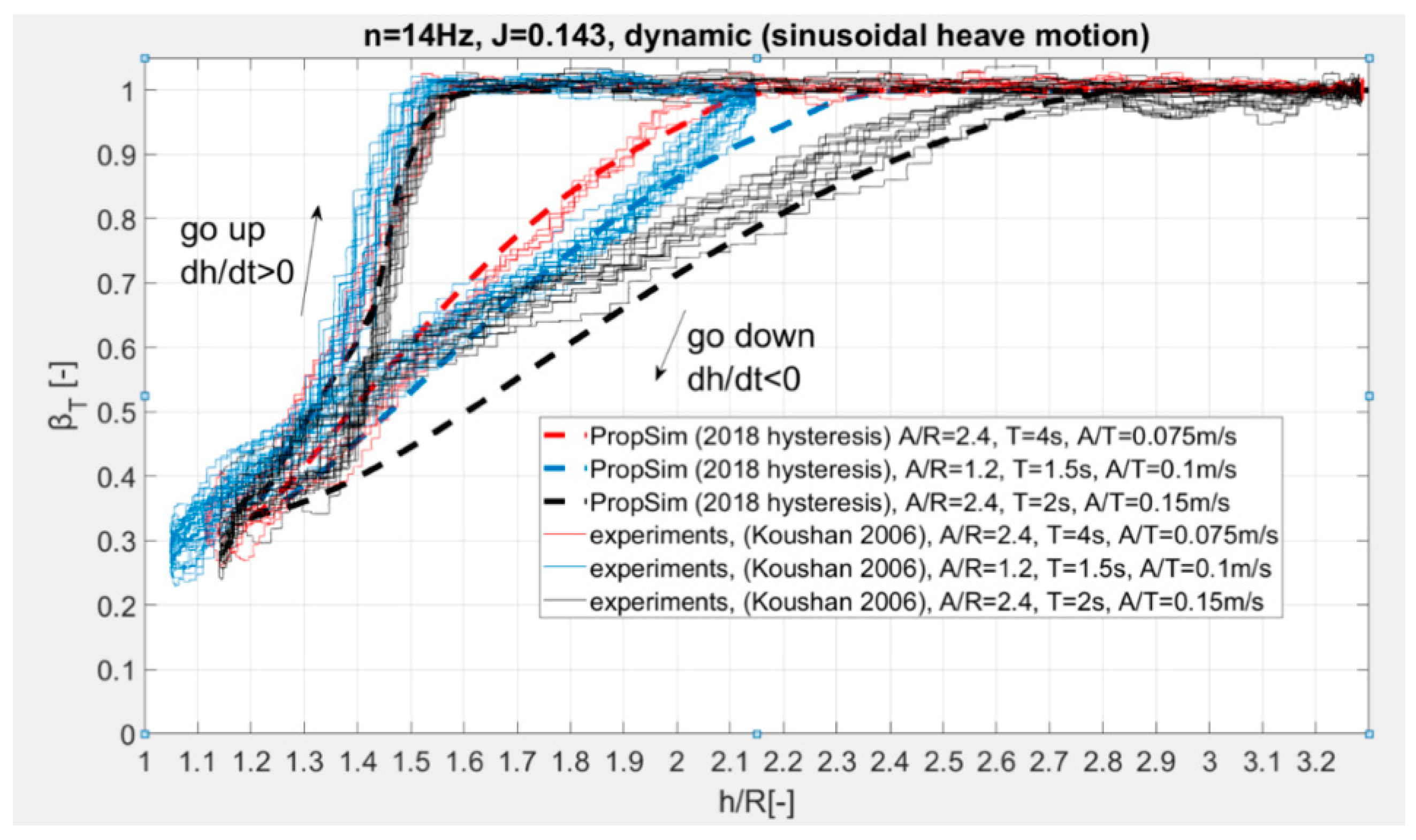
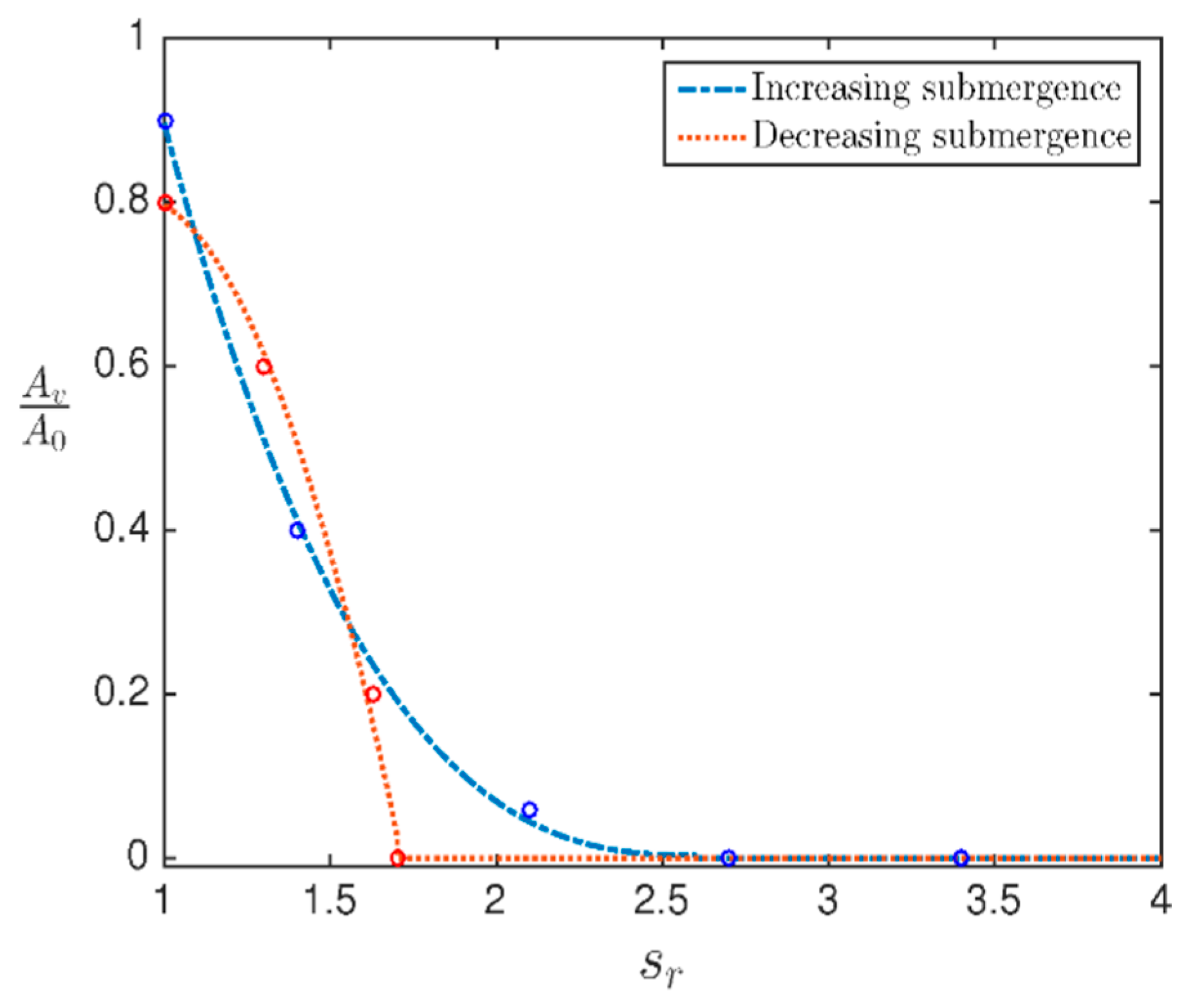
A significant dynamic effect of propeller ventilation is connected with the thrust and torque hysteresis effect, appearing mostly in connection with intermittent vortex ventilation. The hysteresis effect is caused by the fact that it takes a while for ventilation of a submerged propeller to be established, so in a situation with decreasing submergence or increasing propeller loading, there is less thrust loss than for the same condition in static operation, while when ventilation disappears, it takes time for the thrust to build up, due to the Wagner effect, so then thrust loss is larger than the corresponding static operation.
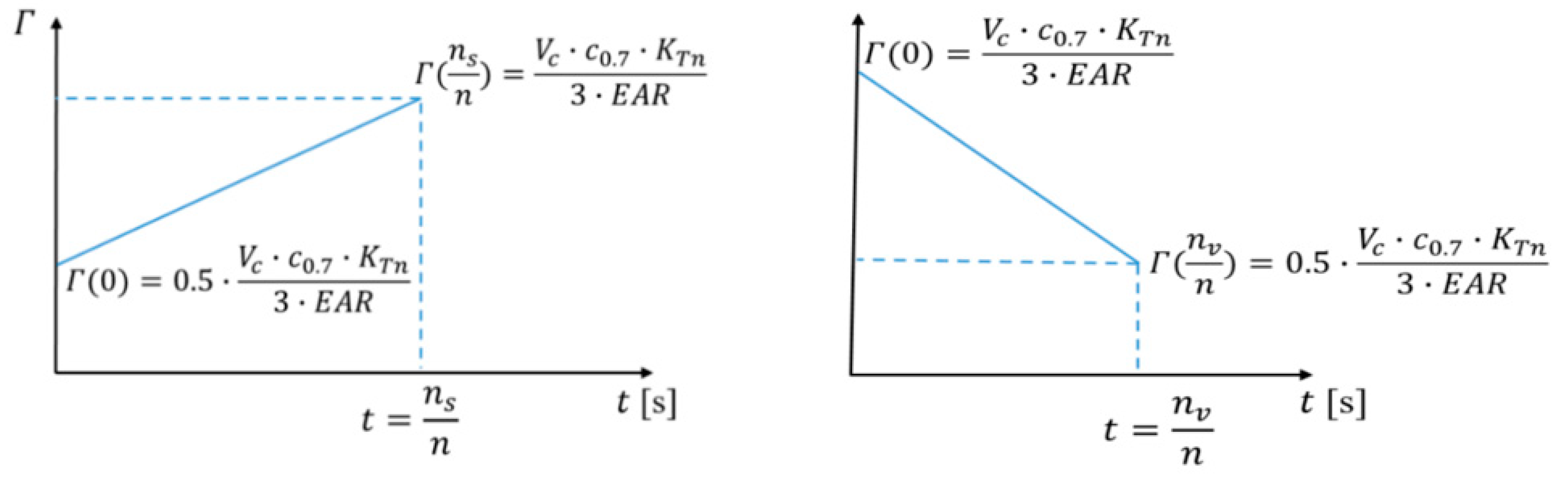
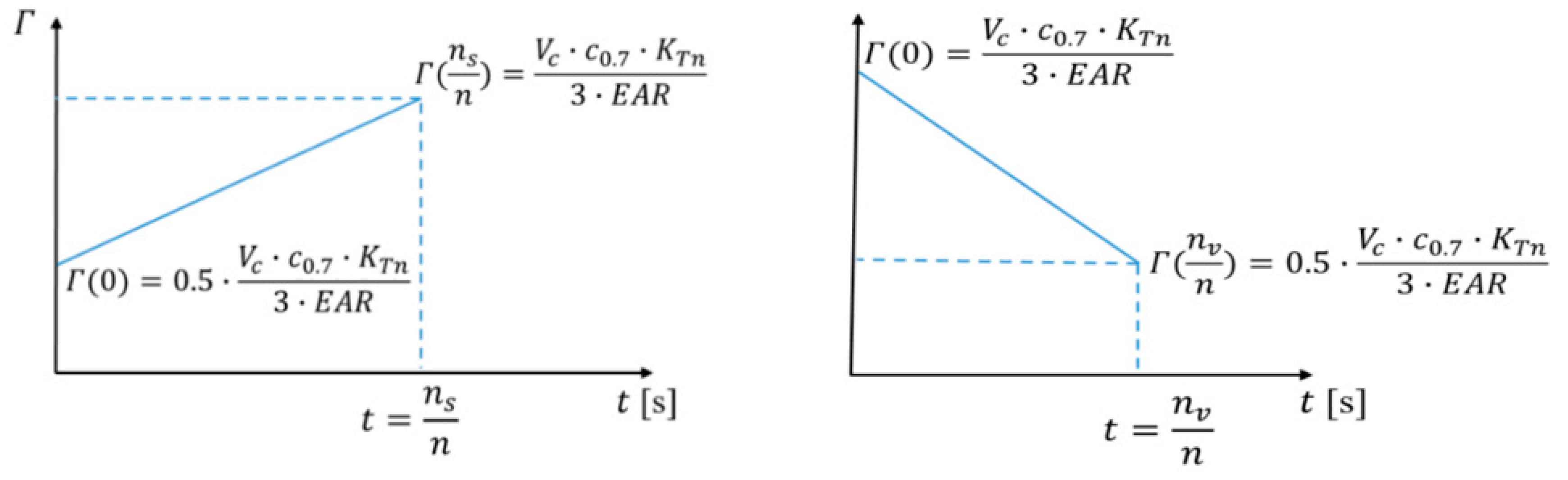
In order to account for this effect, the PropSim (2018) simulation model was updated. The dynamic effect was added by making propeller circulation, described in Equation (11) as a time dependent function.
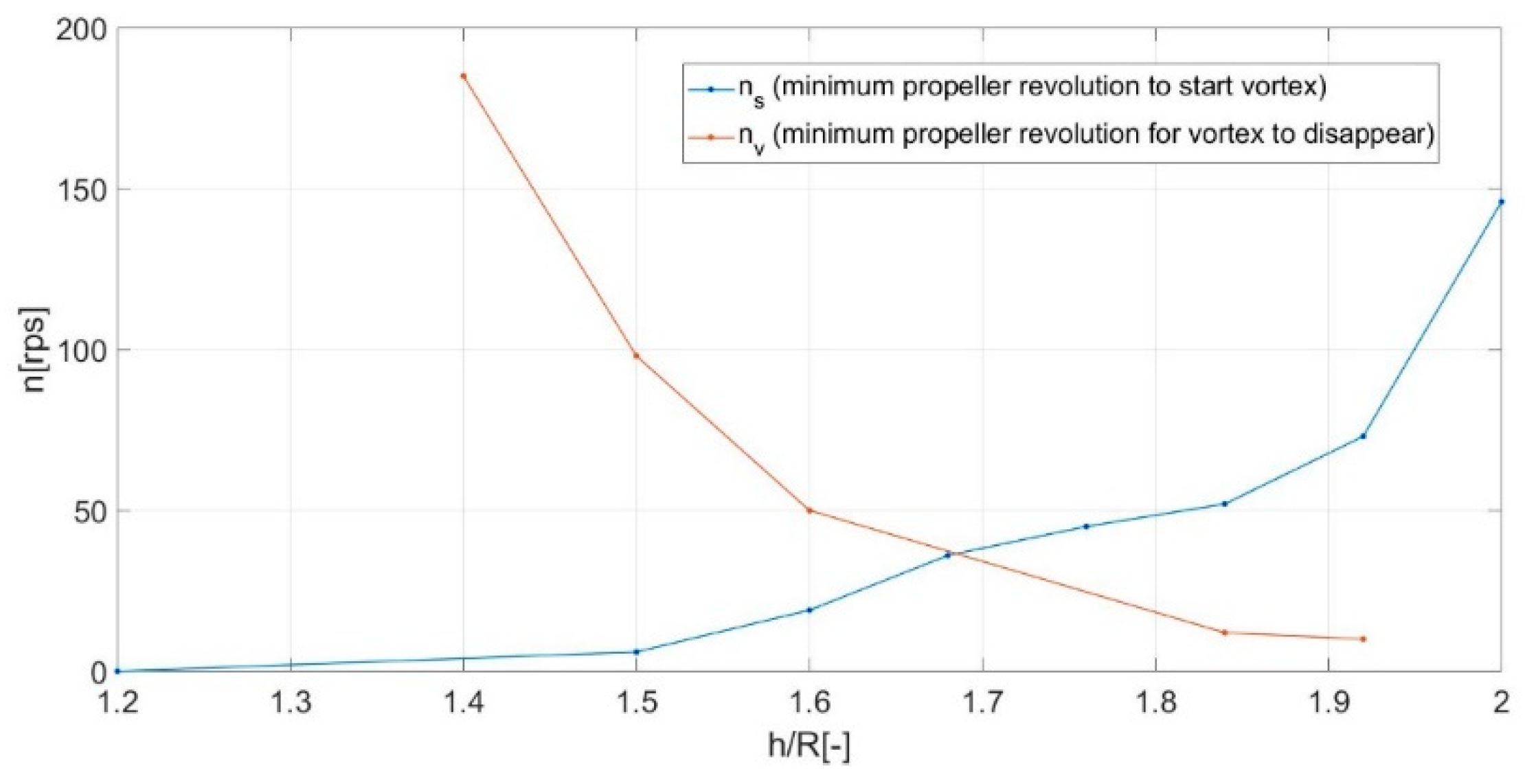
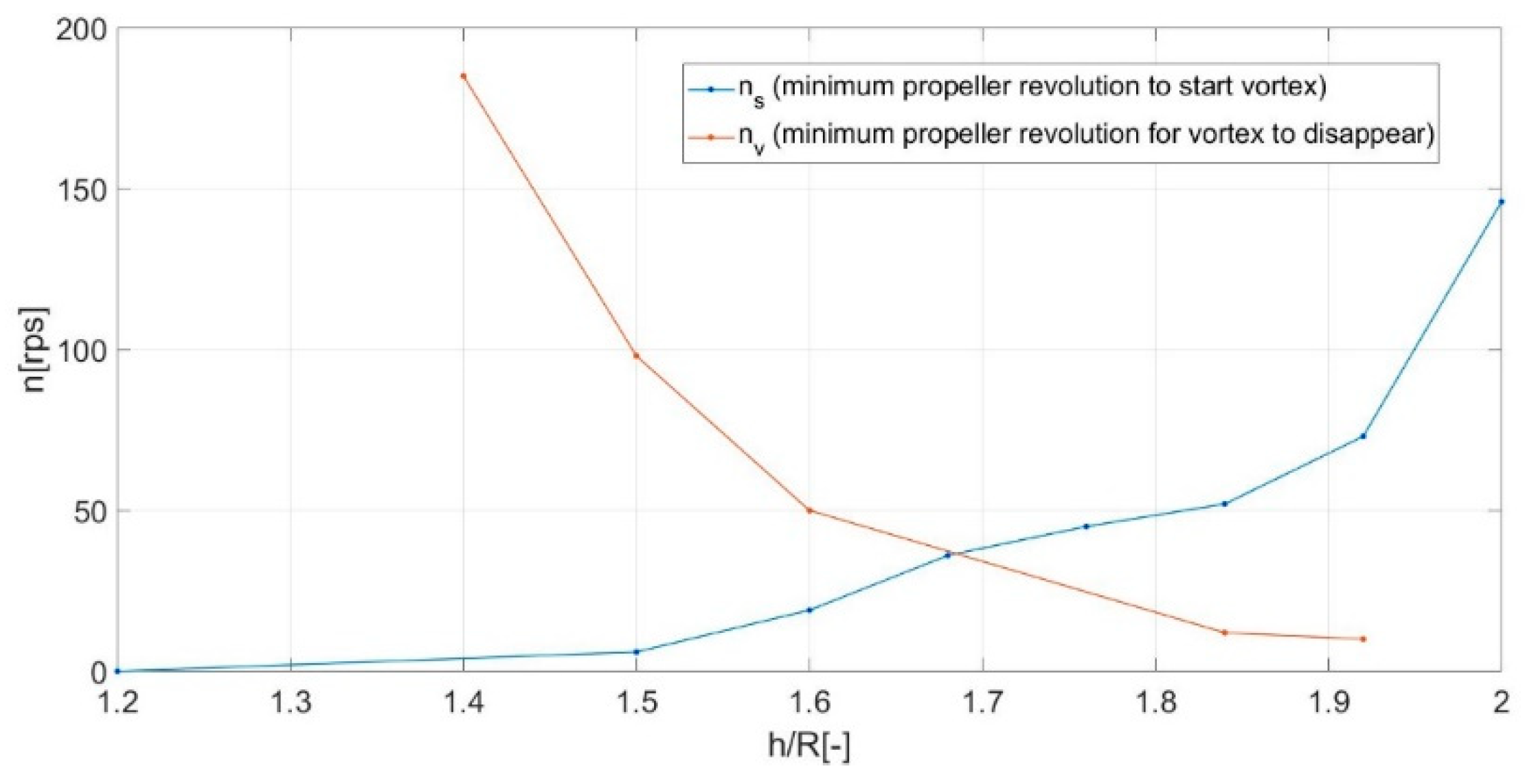
The time dependent function was divided into two different cases. One, which corresponds with time, which is required to establish ventilation, and the other, which corresponds with time, which is desired for ventilation to disappear. Symbol
, which is used in
Figure 6, is the minimum number of propeller revolutions needed to establish ventilation, thus forming a ventilating vortex from the free surface, and symbol
used in
Figure 6 is the minimum number of propeller revolutions needed for a vortex, and thereby ventilation to disappear.
and
are functions of propeller submergence for low advance numbers
. Higher advance numbers are not covered since, then, vortex ventilation is found to be very unlikely, and for free surface ventilation, little or no hysteresis effect is observed in experiments. Propeller circulation as a function of time for the creation and disappearance of vortex ventilation is presented in
Figure 7. Since in principle vortex ventilation is dependent on the surface tension, while the proposed model does not include any effect from surface tension, the model presented here is only valid for high Weber numbers, taken to be
. Polynomial approximations of
and
are presented in the equations below.
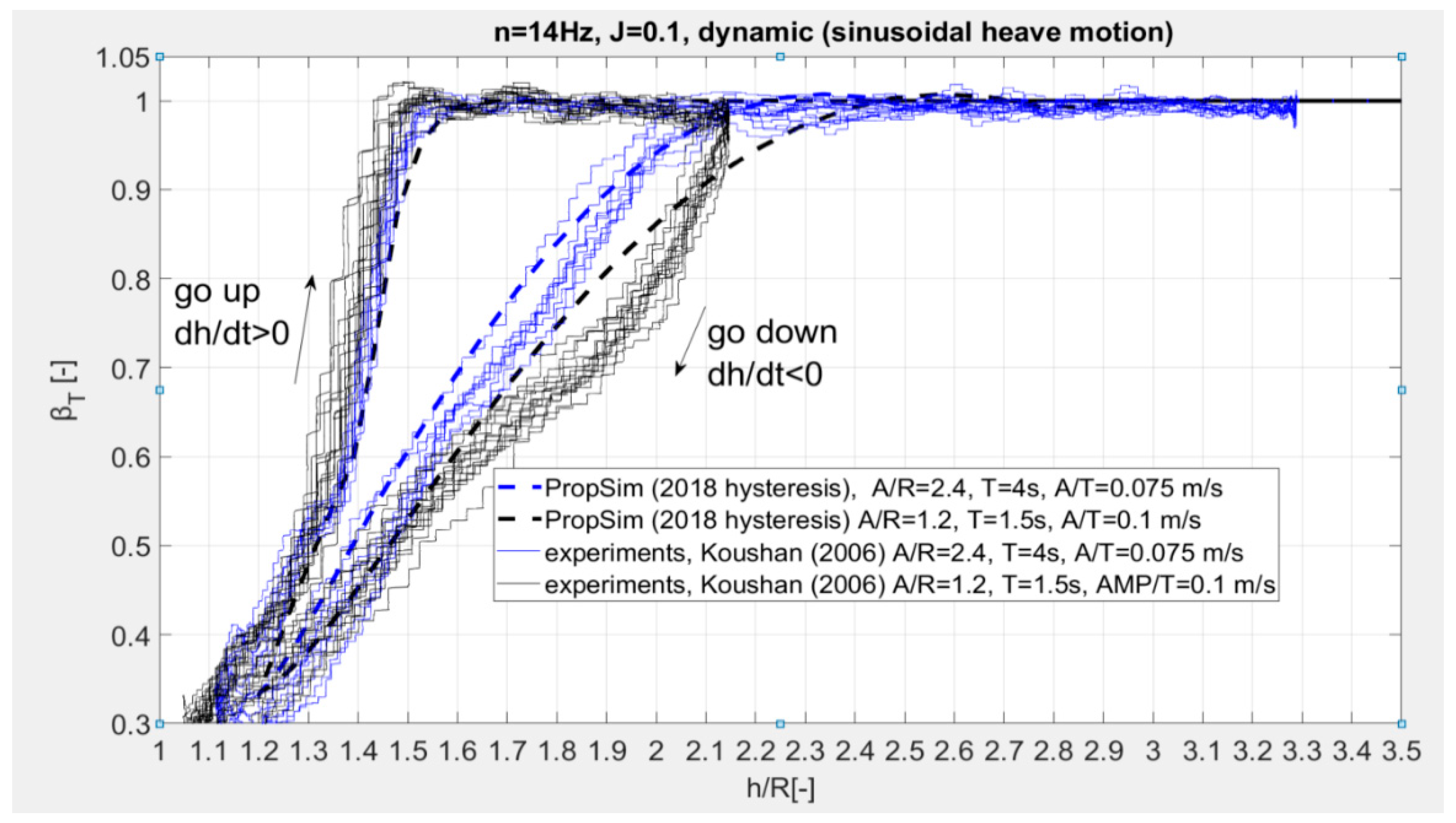
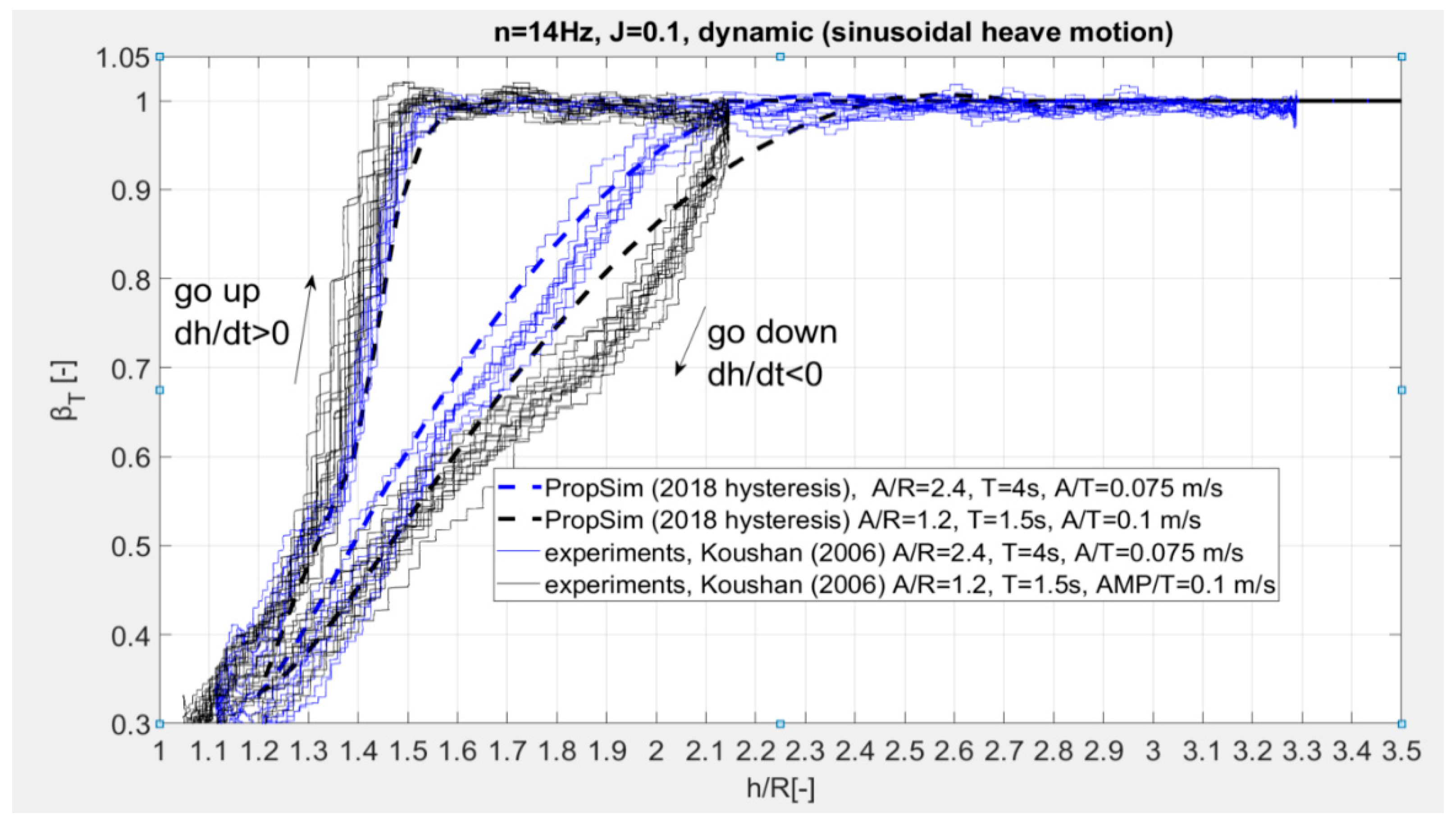
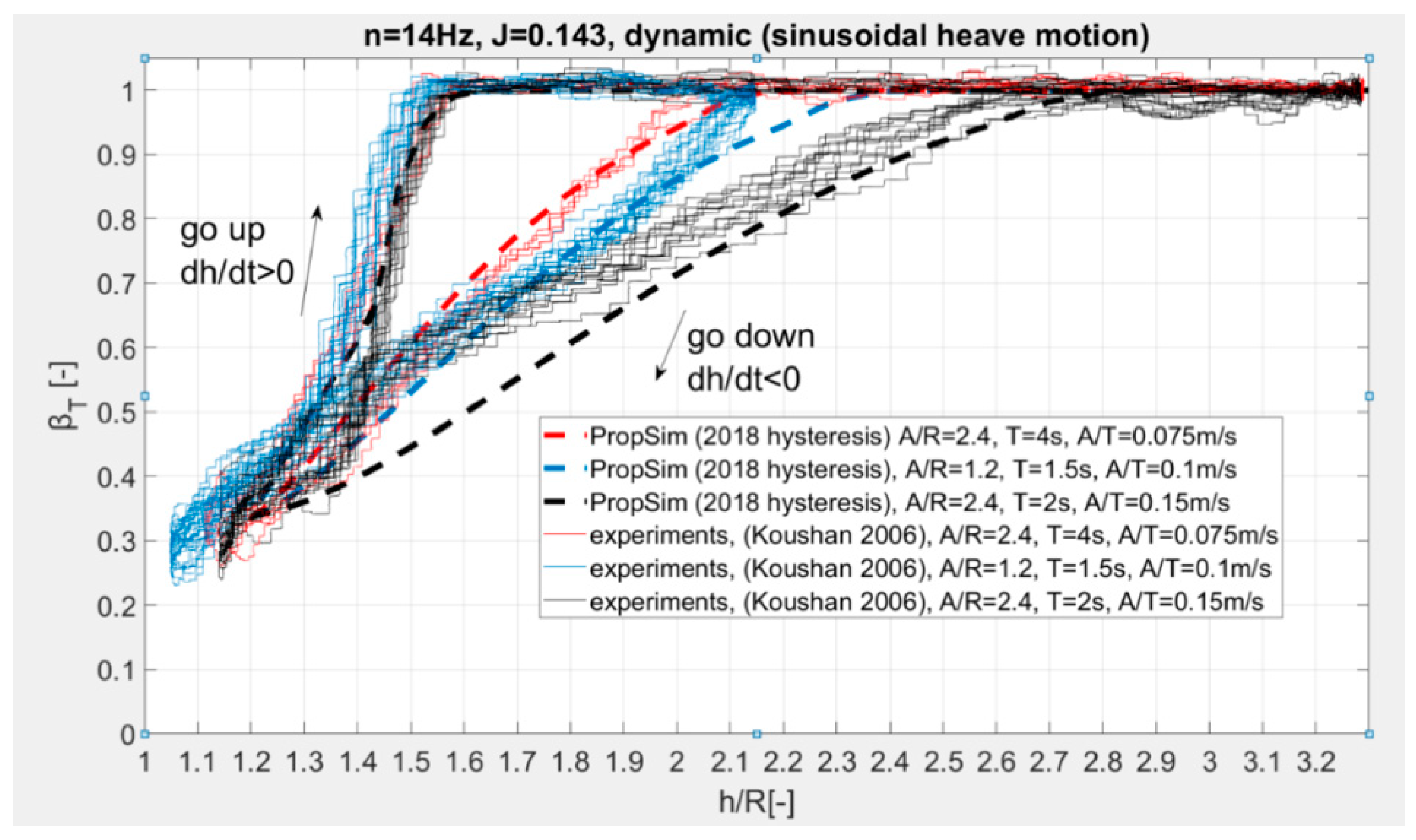
Table 2 shows five different experimental conditions that were used for the comparison between calculations using the PropSim (2018 hysteresis) simulation model and experimental results.
A is the amplitude of the harmonic heave motion, while
T is the period of the harmonic heave motion.
Figure 8 and
Figure 9 show the comparison of thrust loss in the experiments under dynamic heave motion for different heave amplitudes and calculations by using the simulation model PropSim (2018_hysteresis), which includes the hysteresis effect in the simulation. As can be observed in the figures, calculations performed by the PropSim (2018_hysteresis) simulation model agree quite well with experiments. This means that the simulation model correctly accounts for the hysteresis effect on ventilation due to the propeller working with periodically varying submersions.
3.3. Dynamic Effect, Thrust Loss due to Ventilation as a Function of Blade Position Calculated by PropSim (2018_blade_dynamics)
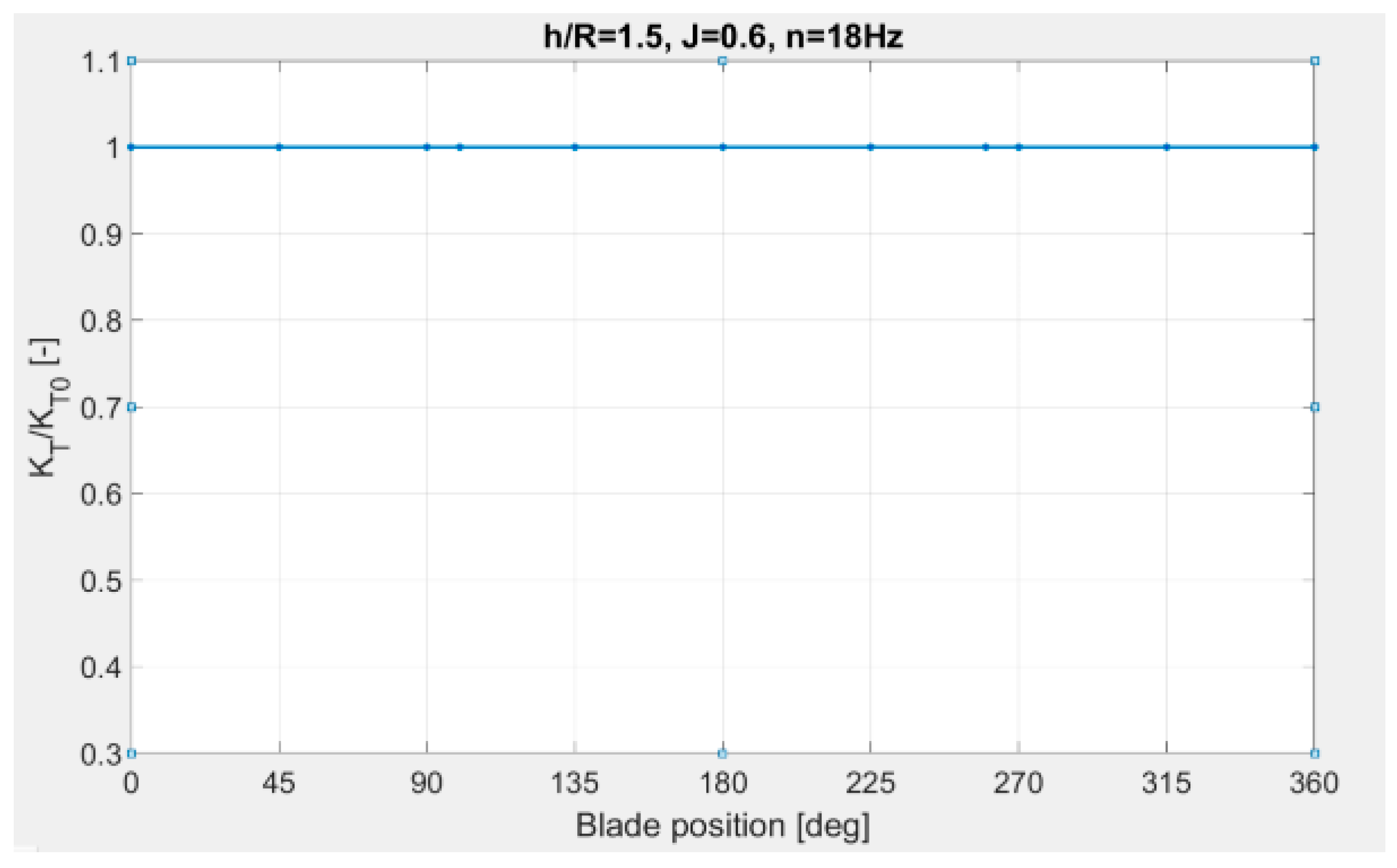
From the experiments, it can be observed that the thrust varies with the position of the blade during one cycle of rotation when the propeller is ventilating and/or coming partly out of water. For deep and constant propeller submergence and low advance numbers (i.e.,
h/
R = 1.5 and
J = 0.15, no out of water effect), the biggest thrust loss is found when the blade is close to the free surface (between
and
). For the propeller blade position between
and
, the thrust is rebuilt and achieves values close to the nominal thrust. The different thrust losses correspond to the different ventilation extent. It is clear from the experiments that in this condition the propeller blade can be both fully, partially, or non-ventilating depending on the blade position. When the propeller is coming out of the water (i.e.,
h/
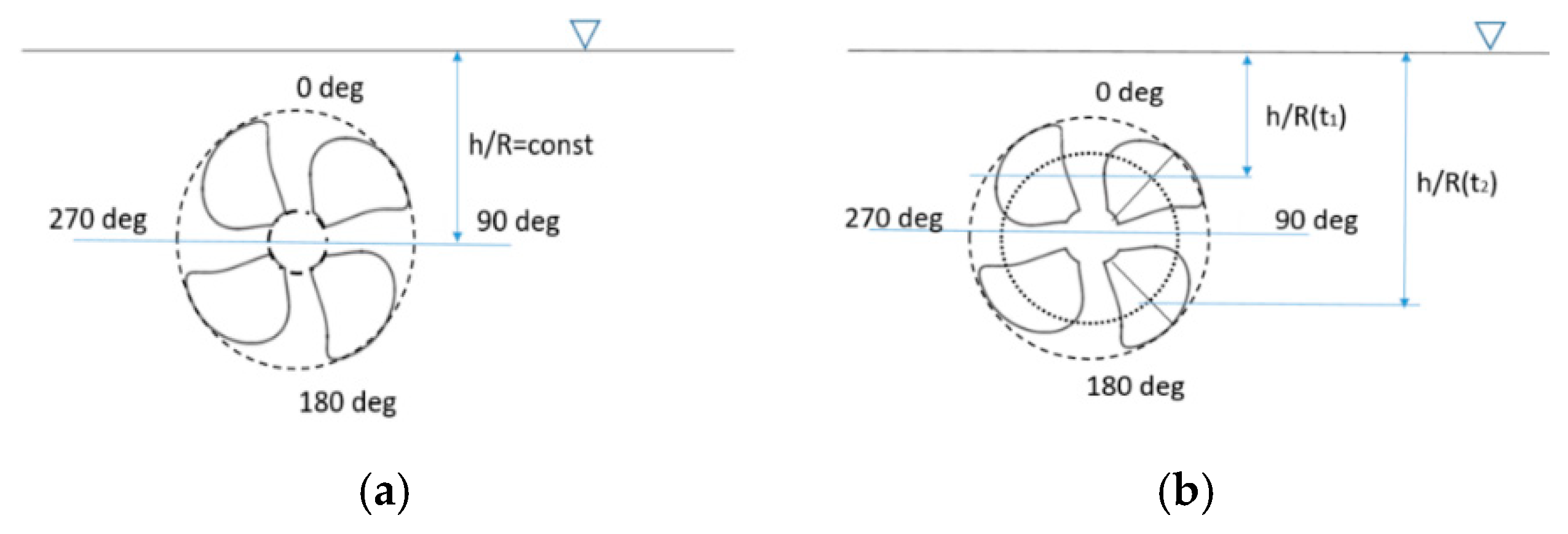
R = 0), the thrust loss also varies due to the blade position. The three reasons for this variation are ventilation, loss of propeller disk area, and Wagner effect. The previous versions of the simulation model denoted PropSim (2016) and PropSim (2018) both include the loss of propeller disk area and the Wagner effect as a function of propeller position. In the previously described versions of PropSim (2018), the thrust averaged over a propeller revolution is calculated, meaning that propeller blade frequency dynamics are not represented in the simulation, see
Figure 10a. In order to include blade frequency dynamics, the blade thrust is computed as a function of the blade position, see
Figure 10b.
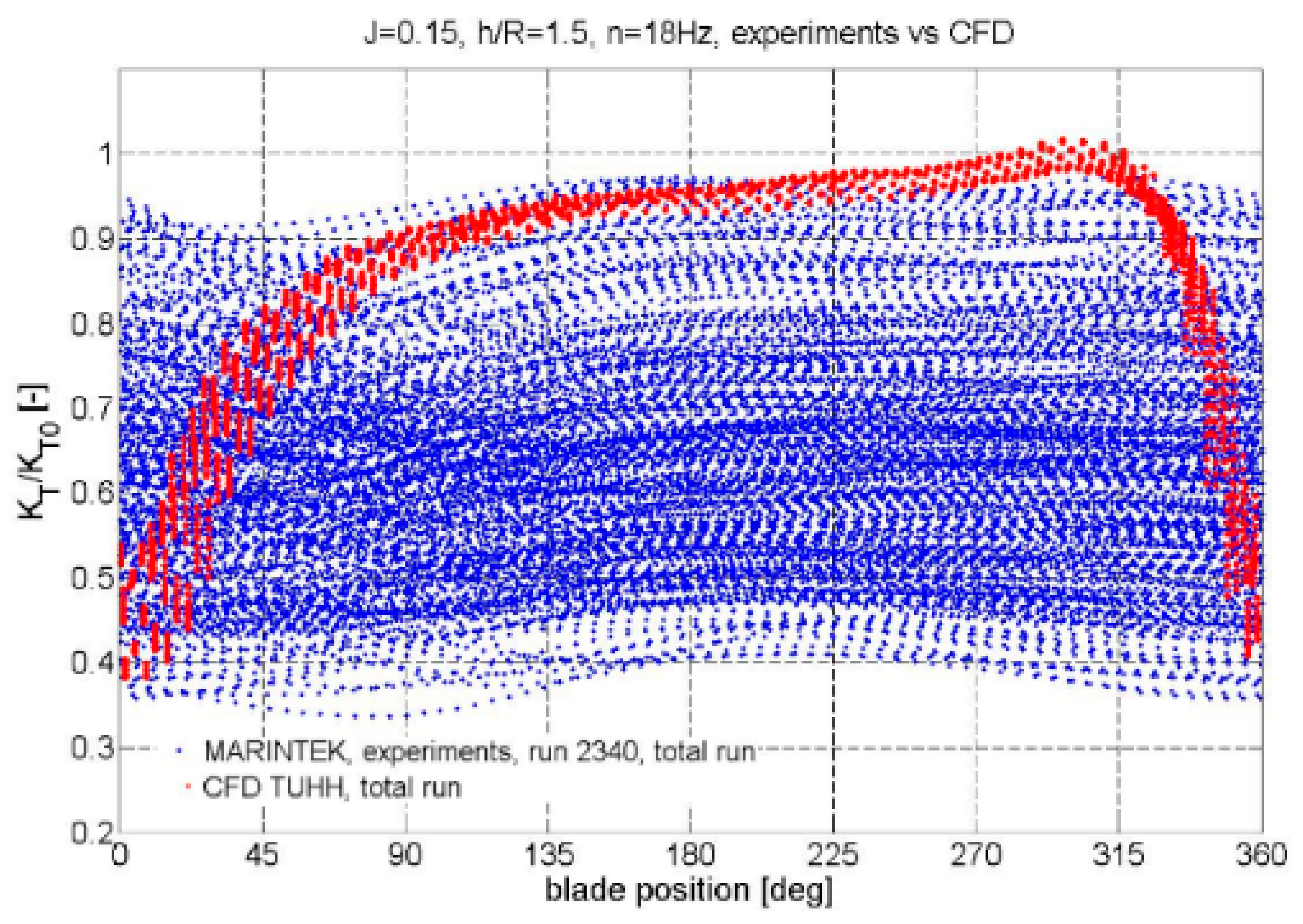
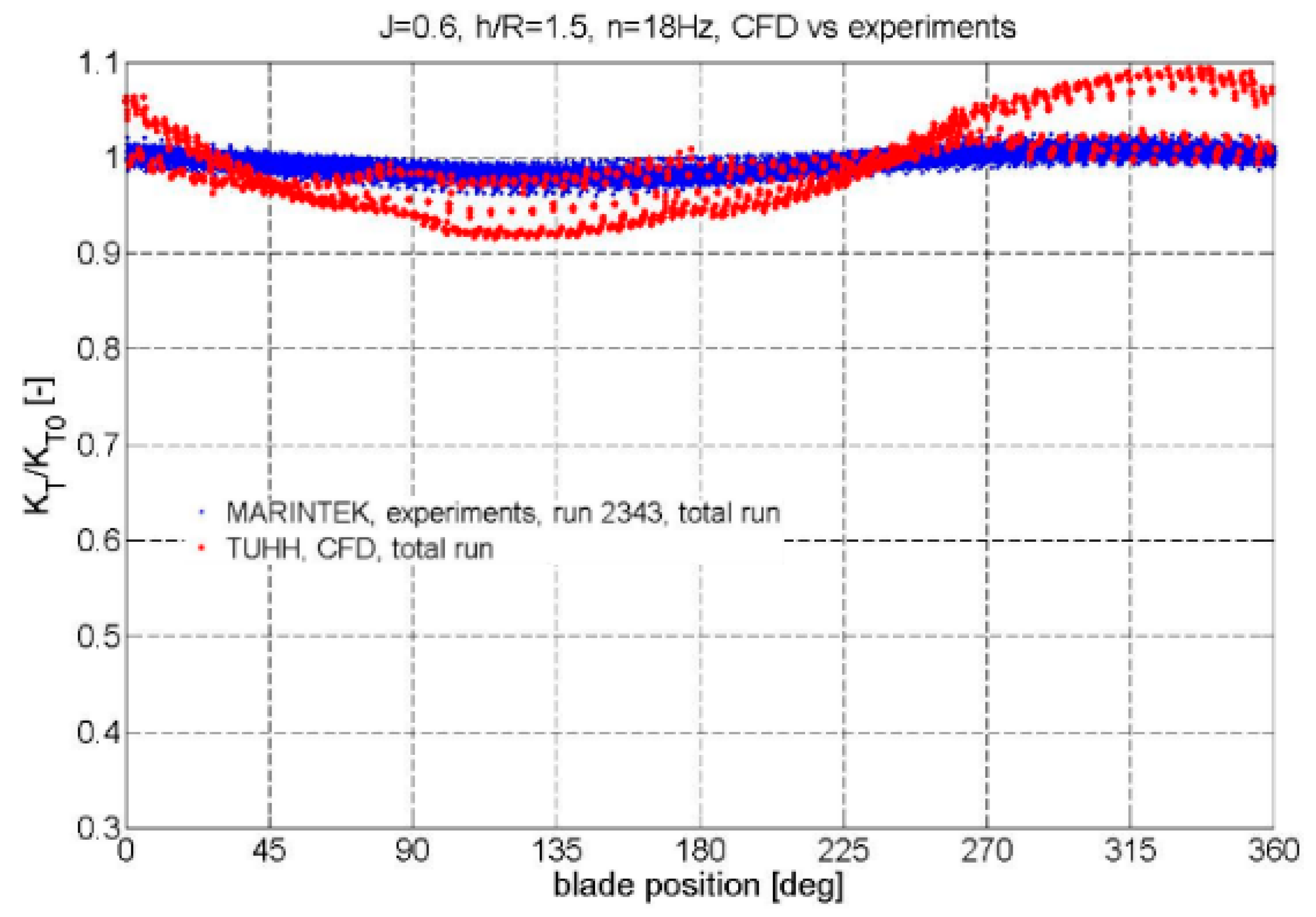
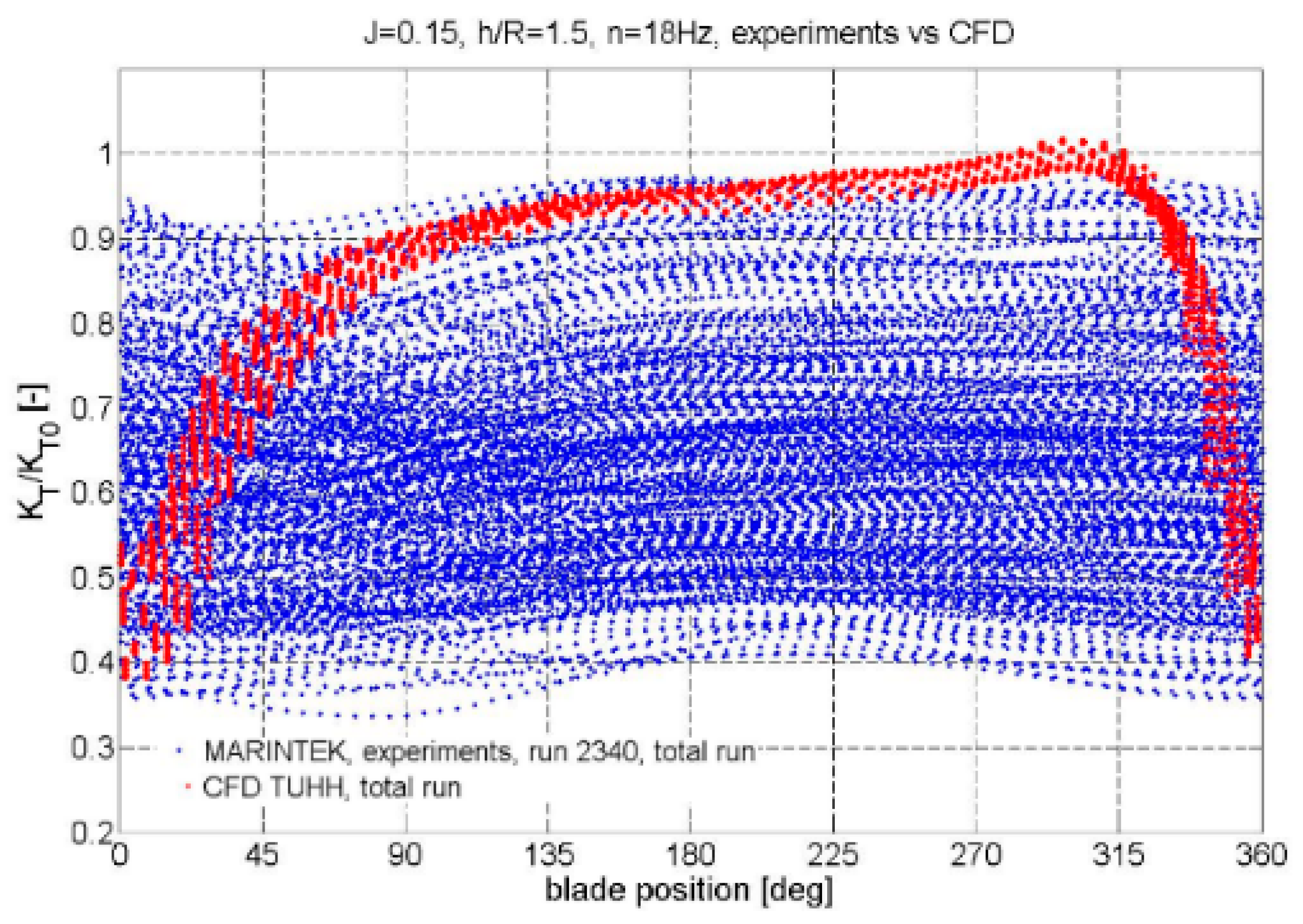
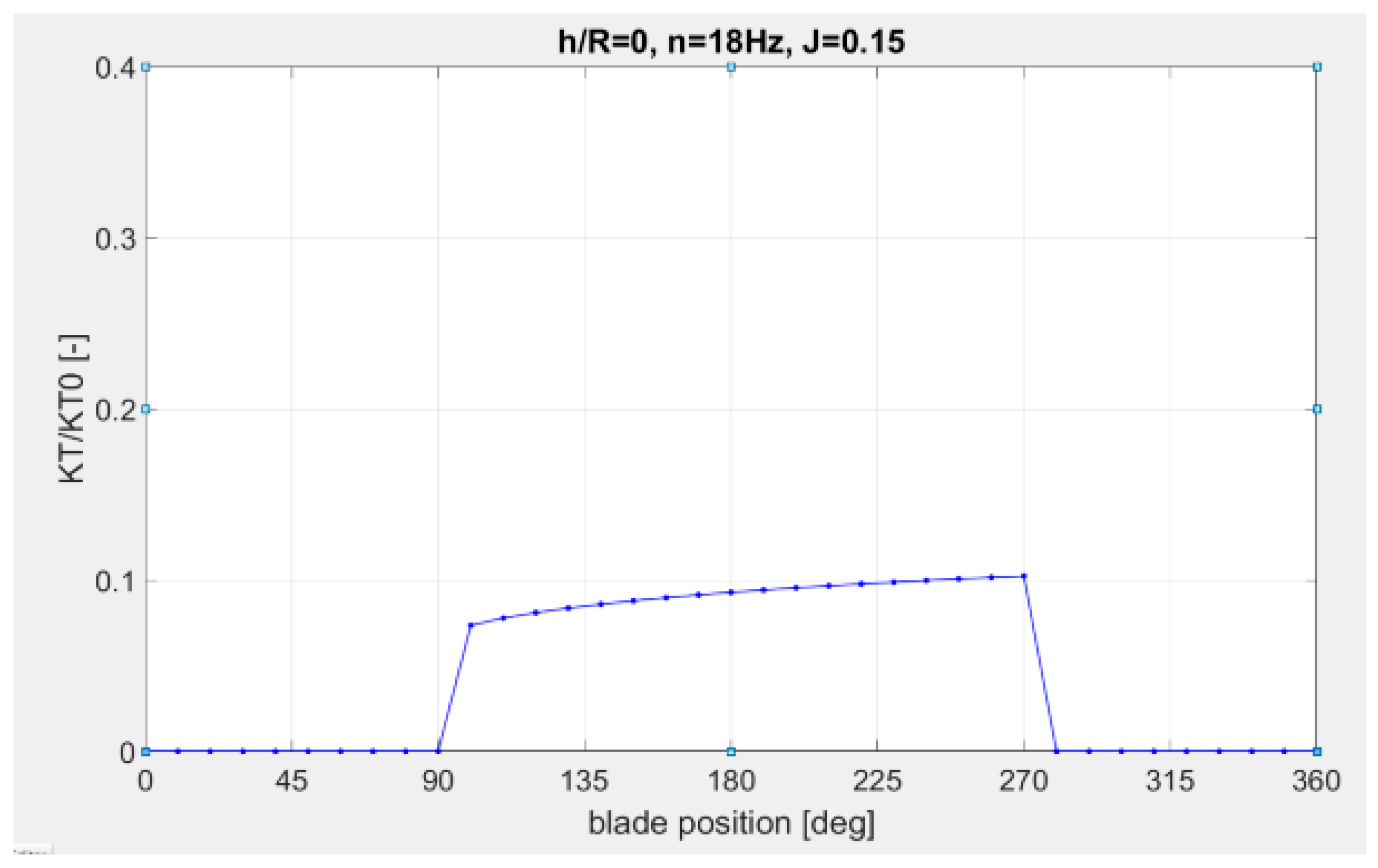
Figure 11 shows the comparison between calculations (CFD) and experiments
Koz10 of the thrust loss due to ventilation as a function of blade position. The CFD calculations were performed by TUHH (Hamburg University of Technology) and based on their in-house code FreSco+. The method used in the calculation was a RANS (Reynolds Averaged Navier Stokes) code based on a finite volume discretisation of the computational domain. For the investigation presented below, the propeller is modelled in the cylindrical domain, which rotates with the number of revolutions of the propeller; see Wockner-Kluwe [
16]. It can be observed from the figure that the prediction of thrust loss is more repeatable between revolutions for CFD calculations than for experiments.
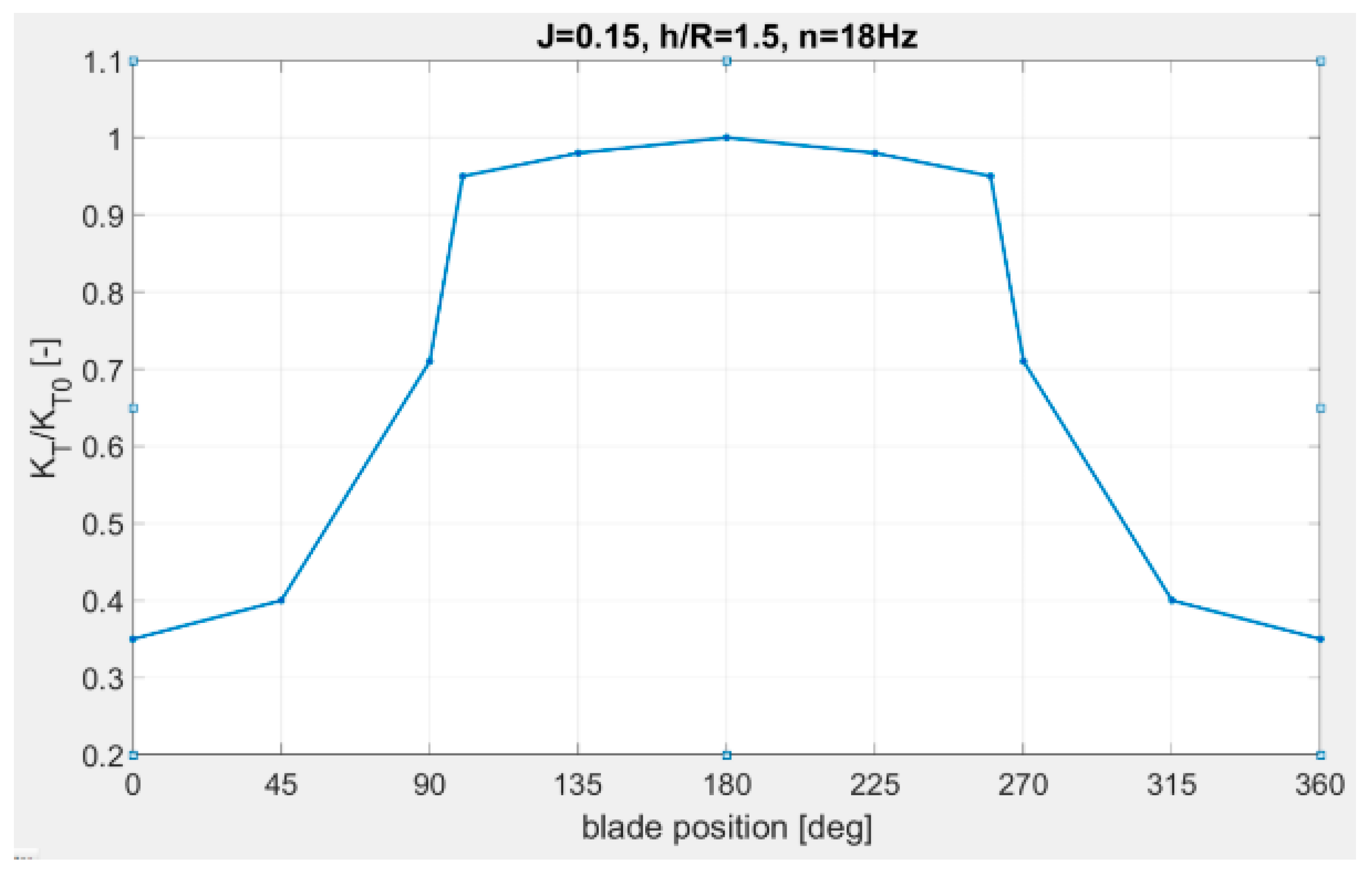
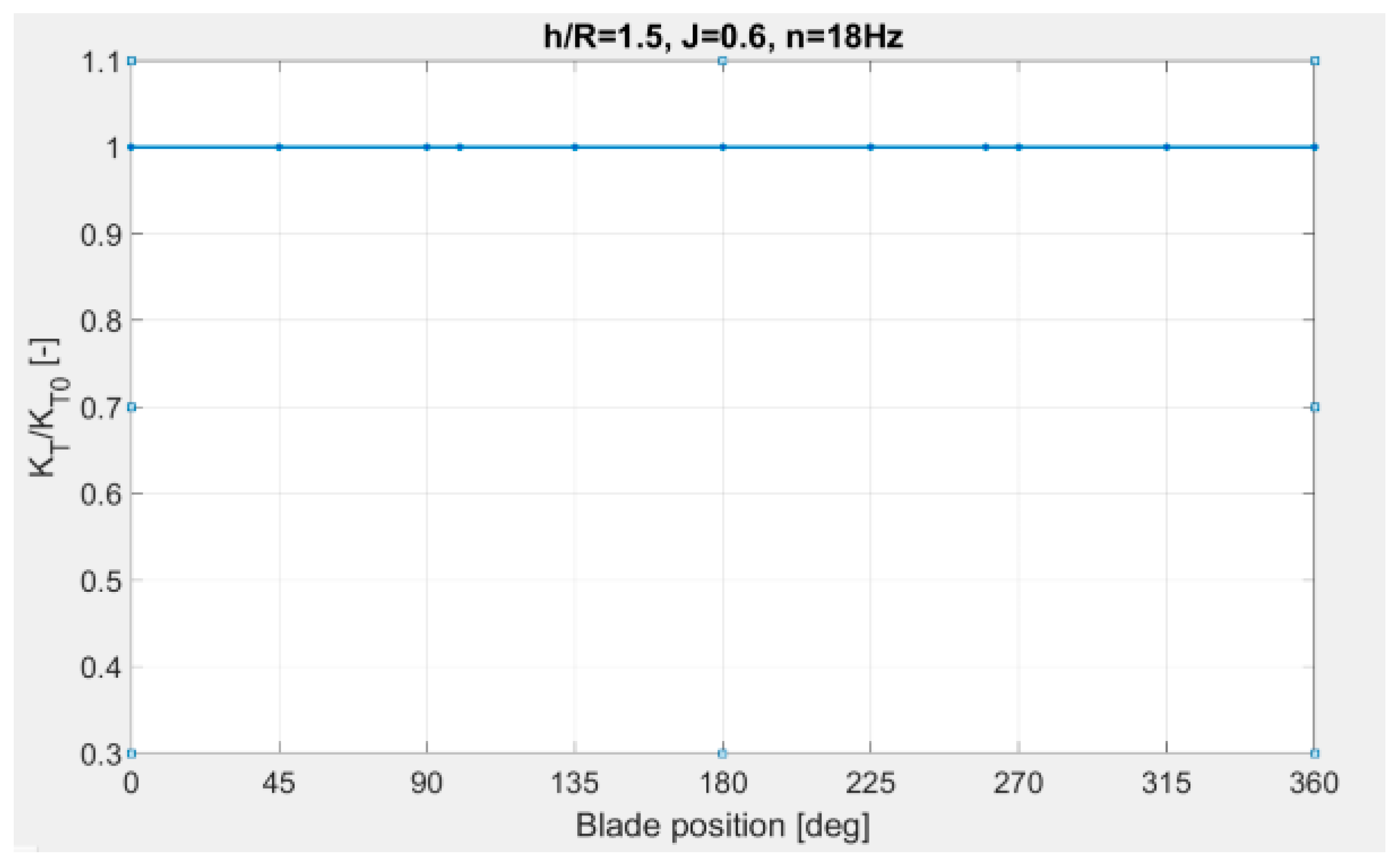
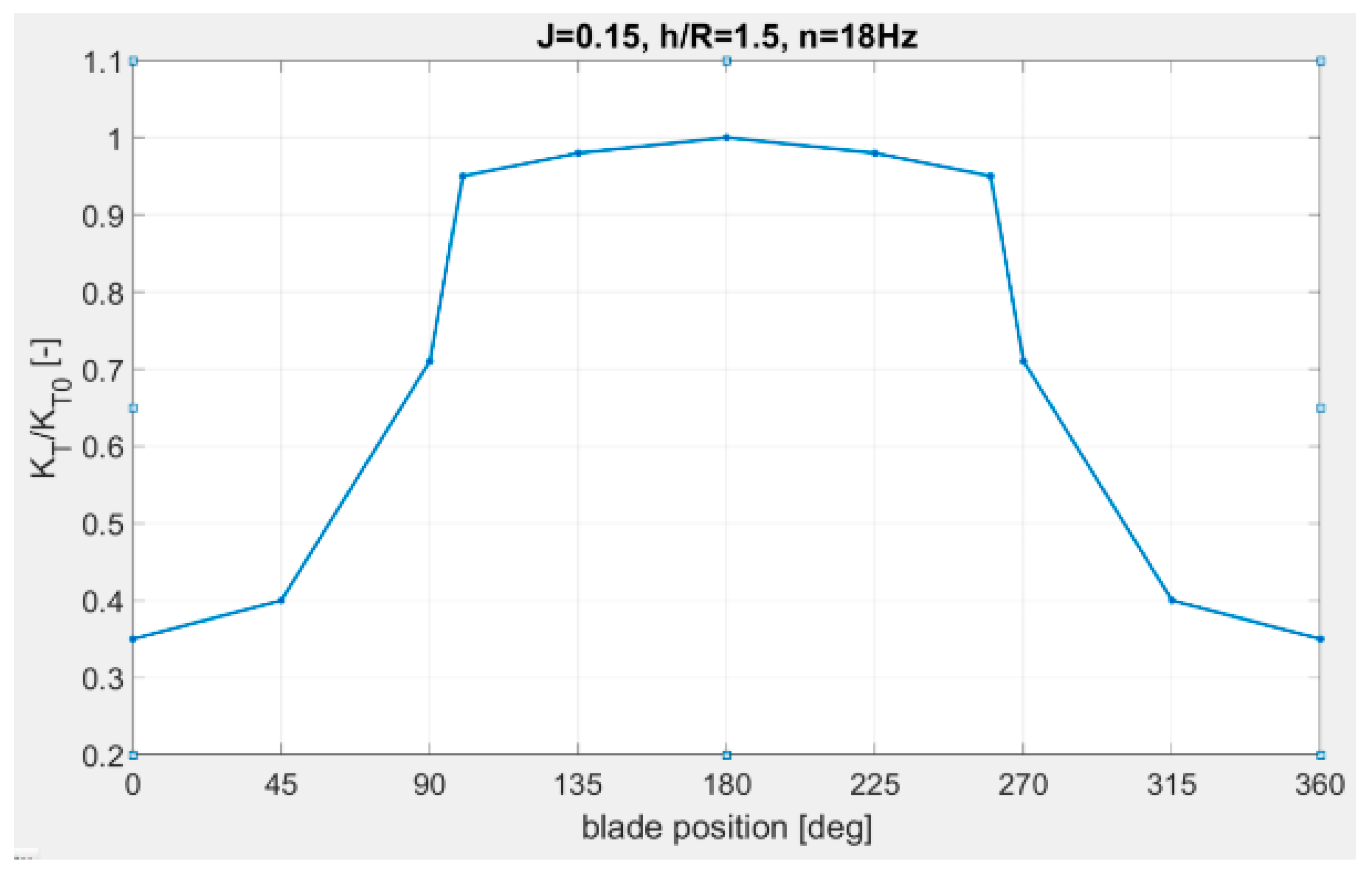
Figure 12 shows the calculation of the thrust loss due to ventilation, which varies due to different blade positions (PropSim (2018_blade_dynamics)).
It can be observed from the comparison of
Figure 11 and
Figure 12 that the calculations made by simulation using PropSim (2018_blade_dynamics) are closer to the CFD computational results than the experimental results. For both CFD and simulations, similar thrust loss is observed for every propeller revolution. During measurements, different thrust losses appear depending on the time in the experiments, see
Figure 11. The reason for the large variation of thrust loss between the propeller revolutions is not known. Measurement error is unlikely, given the repeatability of measurements in fully-submerged conditions in the same experimental campaign. It is believed that the variation might be caused by the ventilatilon in this condition being unstable and on the limit between the ventilated and non-ventilated condition. When the propeller ventilates, the thrust is reduced, so the thrust loading is reduced, and thereby reducing the ventilation probability, which, in turn, causes the ventilation to disappear after some time. The fact that it takes some time for the ventilation to disappear is what causes the hysteresis effect discussed earlier. When the ventilation disappears, the thrust and, therefore, thrust loading increases again, leading eventually to new ventilation. The reason for the perfectly symmetric appearance of the thrust loss factor versus the blade angle in
Figure 12 is that the calculation method is quasi-static—it does not capture the “memory effect” of the flow, which is present in both reality and CFD.
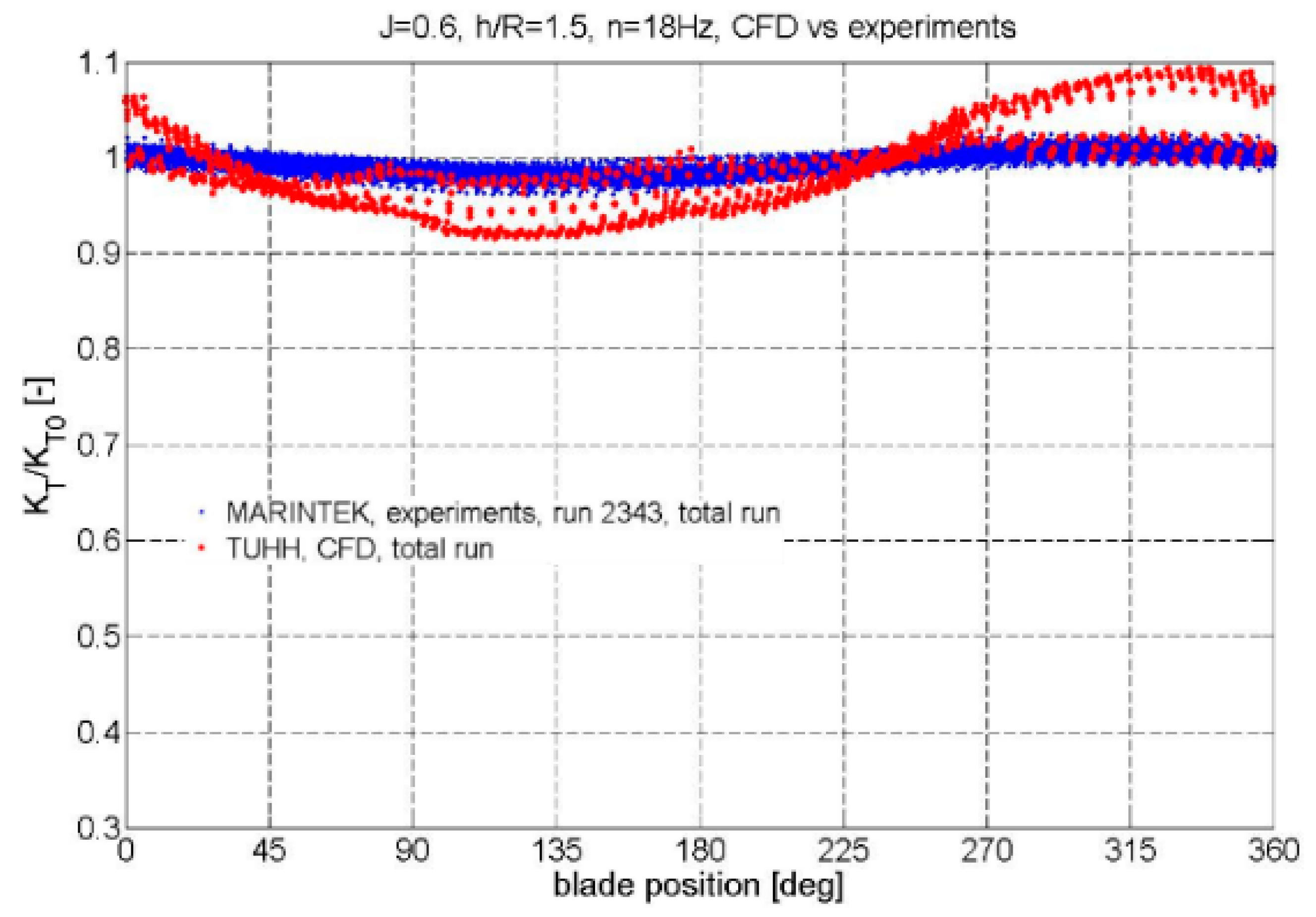
Figure 13 and
Figure 14 show the thrust loss variations at different blade positions for
n = 18 Hz and higher advance numbers.
Figure 13 shows the comparison between calculations (CFD) and experiments
Koz10 of the thrust loss due to ventilation as a function of blade position.
Figure 14 shows the calculation of the thrust loss by using the PropSim (2018_blade_dynamics) simulation model. By comparing the two figures, it is seen that both experiments and PropSim-calculations show hardly any thrust loss. For the experiments, there is a very slight variation of thrust, which is not due to ventilation but might be caused by the free surface (wave making) effect. For PropSim, this type of free surface effect is not modeled. The CFD shows a thrust that varies with position, although showing a partly higher thrust than the nominal. The reason for this variation is not known but might also be due to the free surface (wave making) effect.
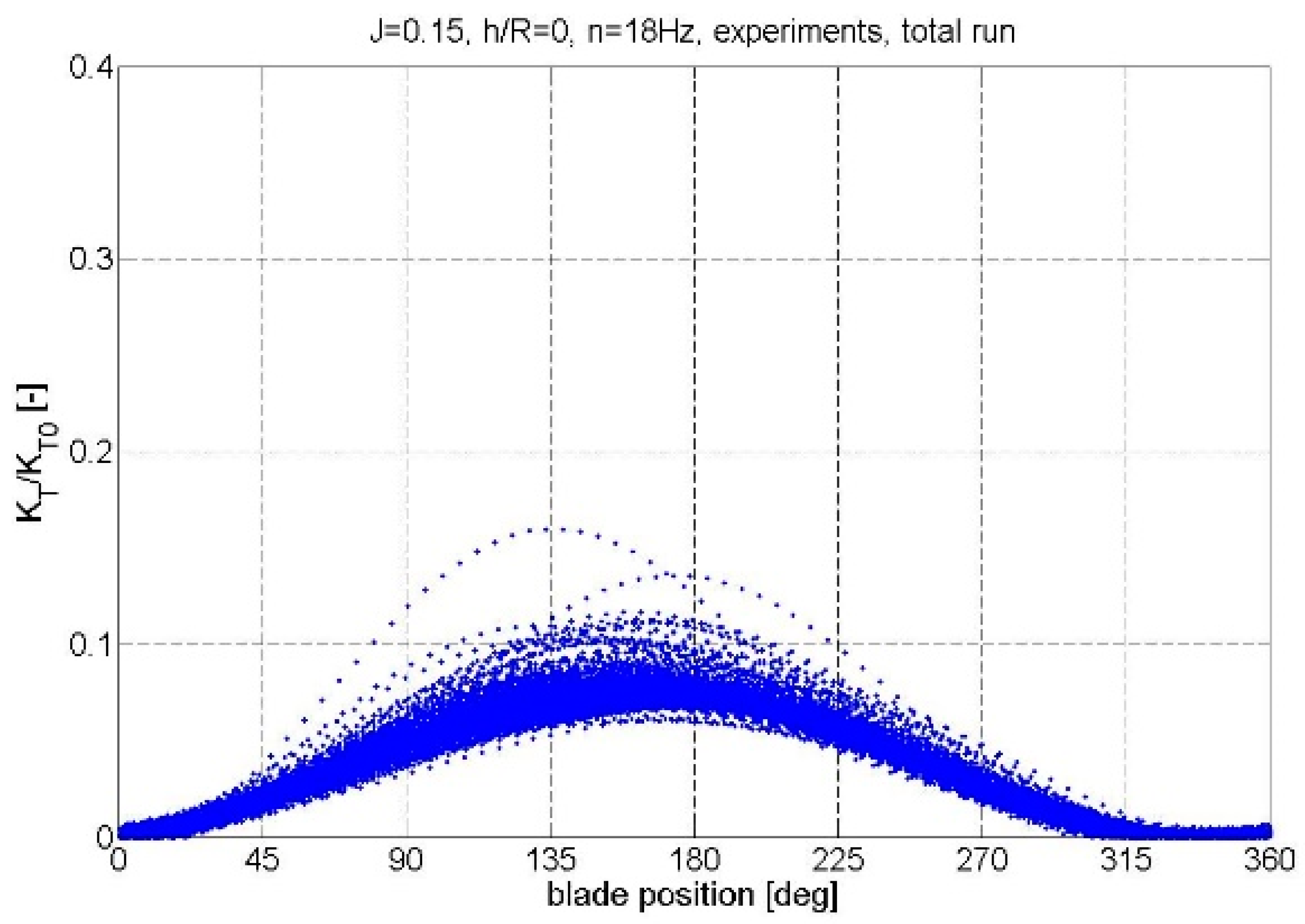
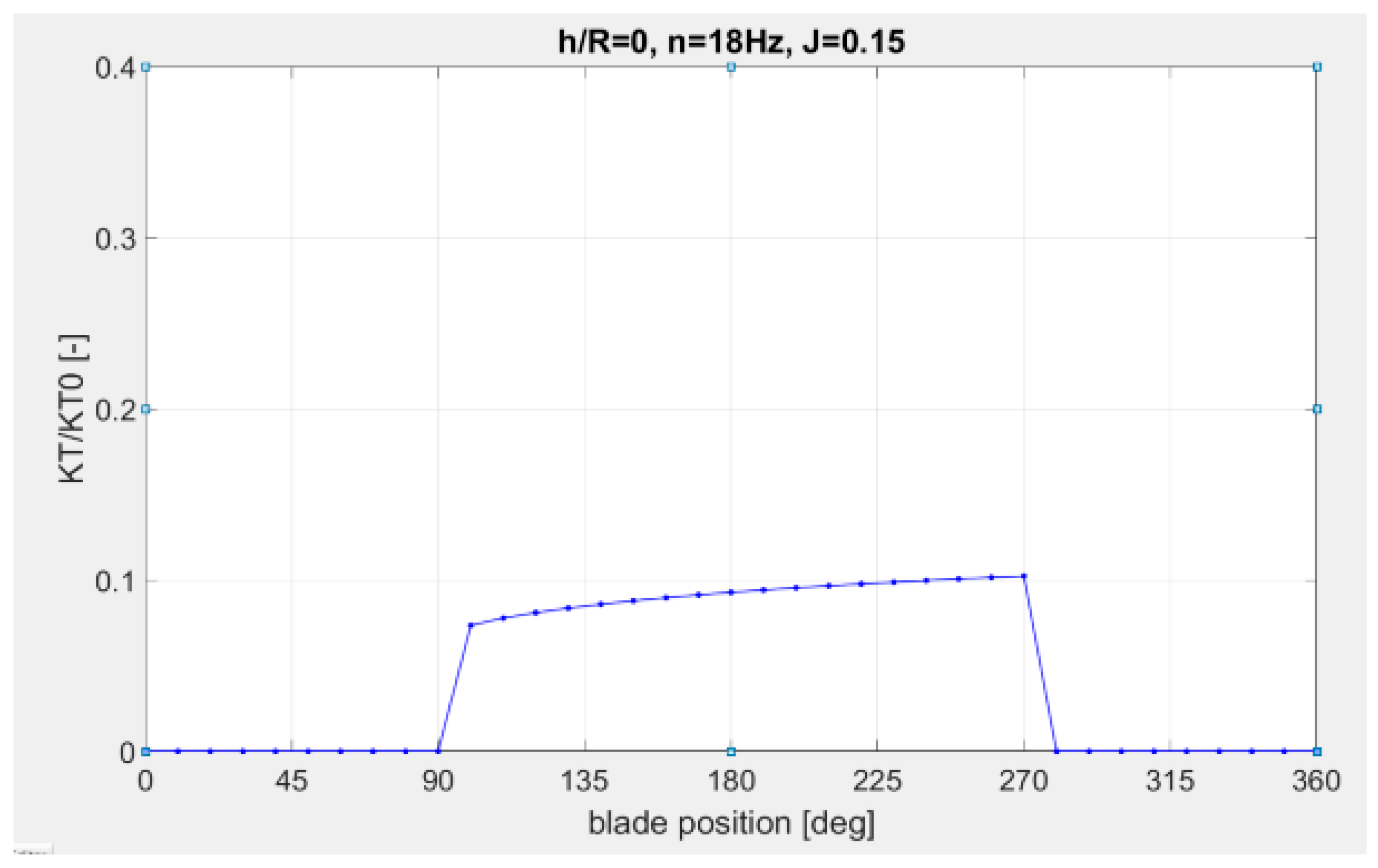
Figure 15 and
Figure 16 show the thrust variations at different blade positions in one cycle of revolution for
n = 18 Hz and a low advance number. For this case, the propeller is half submerged, so different thrust loss is a consequence of a combination of the out-of-water effect, Wagner effect, and ventilation.
Figure 15 and
Figure 16 show relatively good agreement between the experimental results and calculations, although the experimental results are more gradually changing compared to the simulation. The reason for this is because in the proposed method, the propeller blade forces are considered at the lifting line. This means that a half-submerged propeller will get zero propeller blade forces in the upper half of one revolution, as seen in
Figure 16, which is inconsistent with the gradual variation seen from the experimental results in
Figure 15. In the experimental results, the thrust has a peak of around 170°–180°; however, the thrust continues to increase until the lifting line leaves the water. This is due to the included Wagner effect, which gives a gradual increase in the thrust loss factor towards unity as the blade section travels up to around six chord lengths.
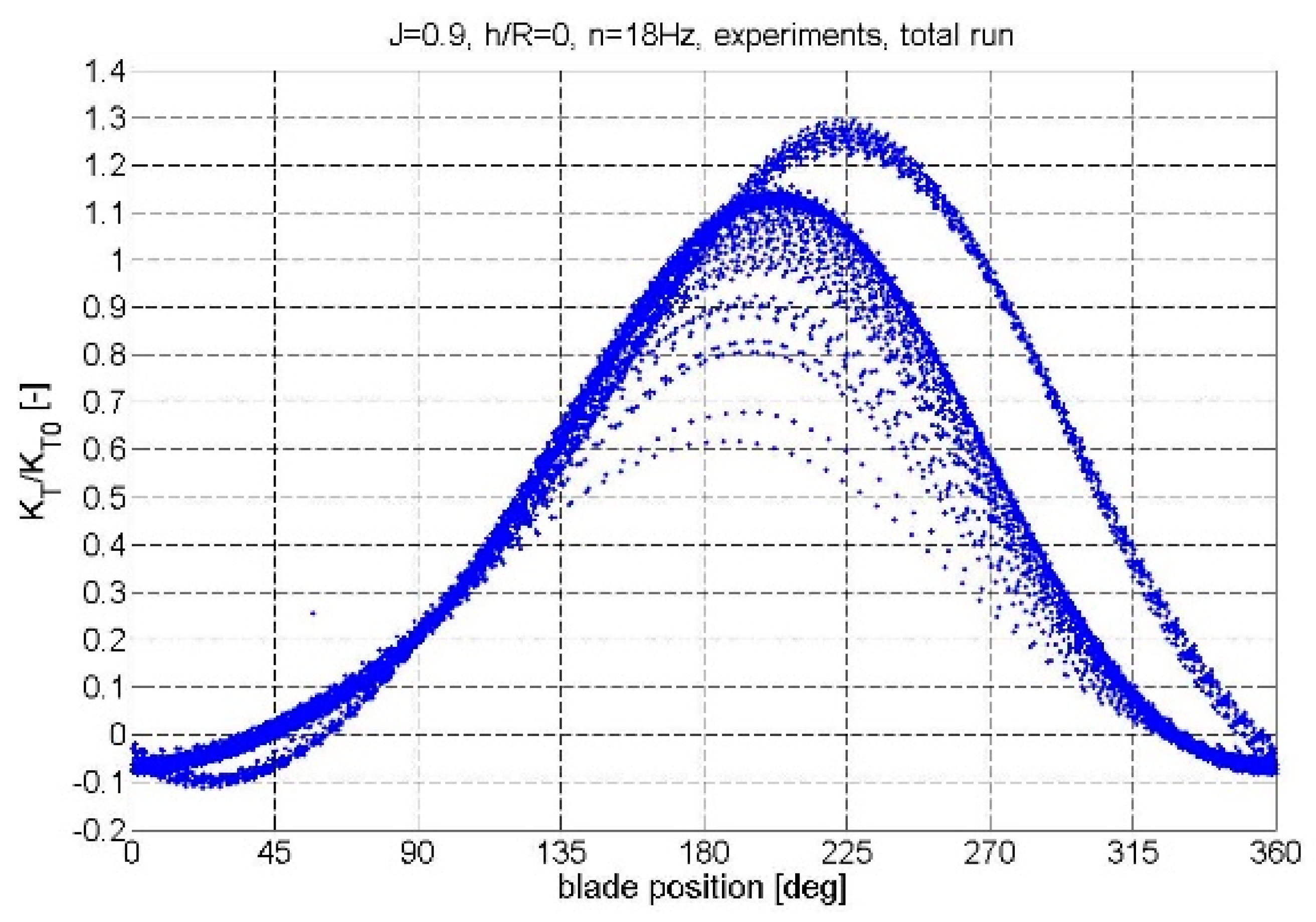
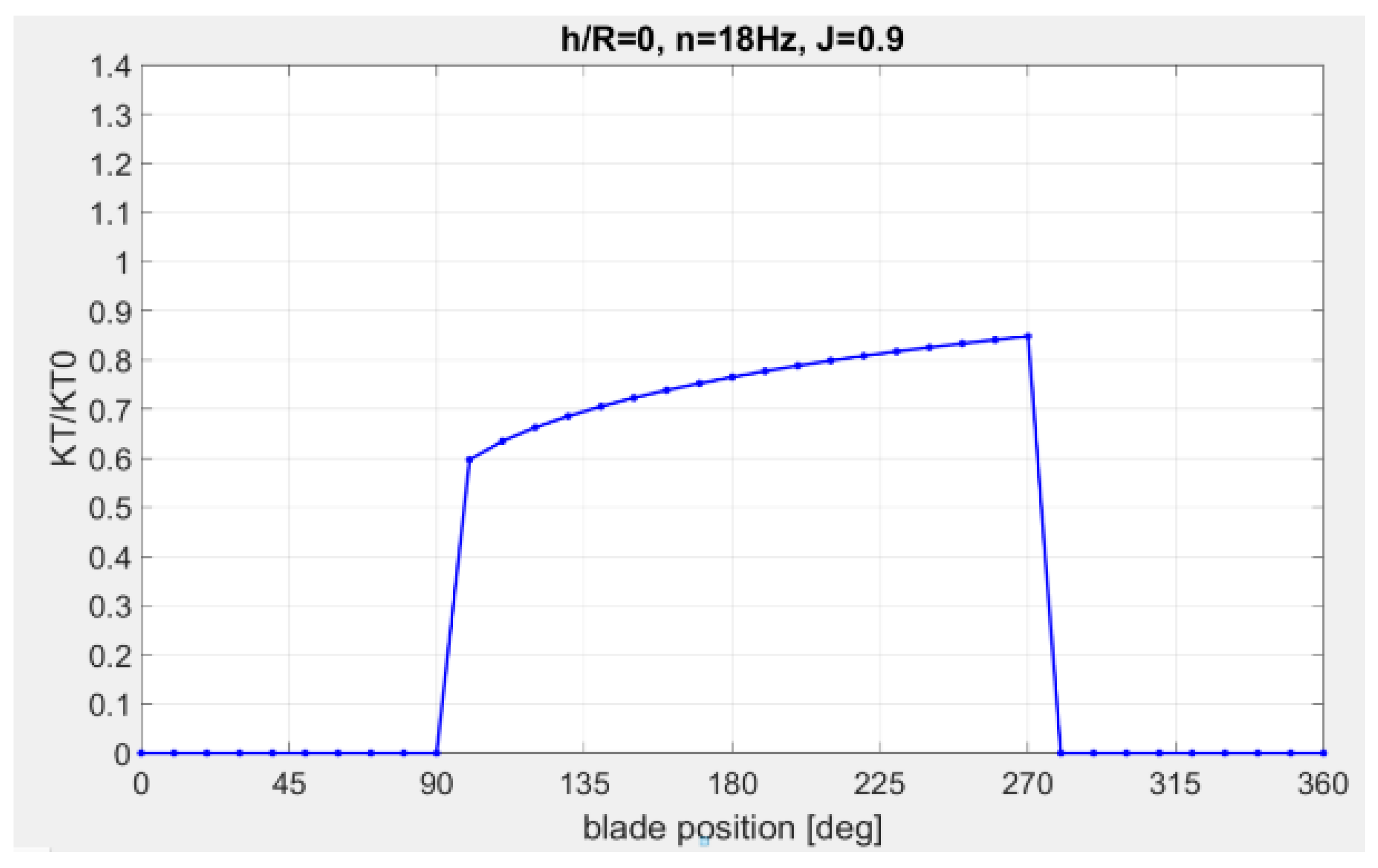
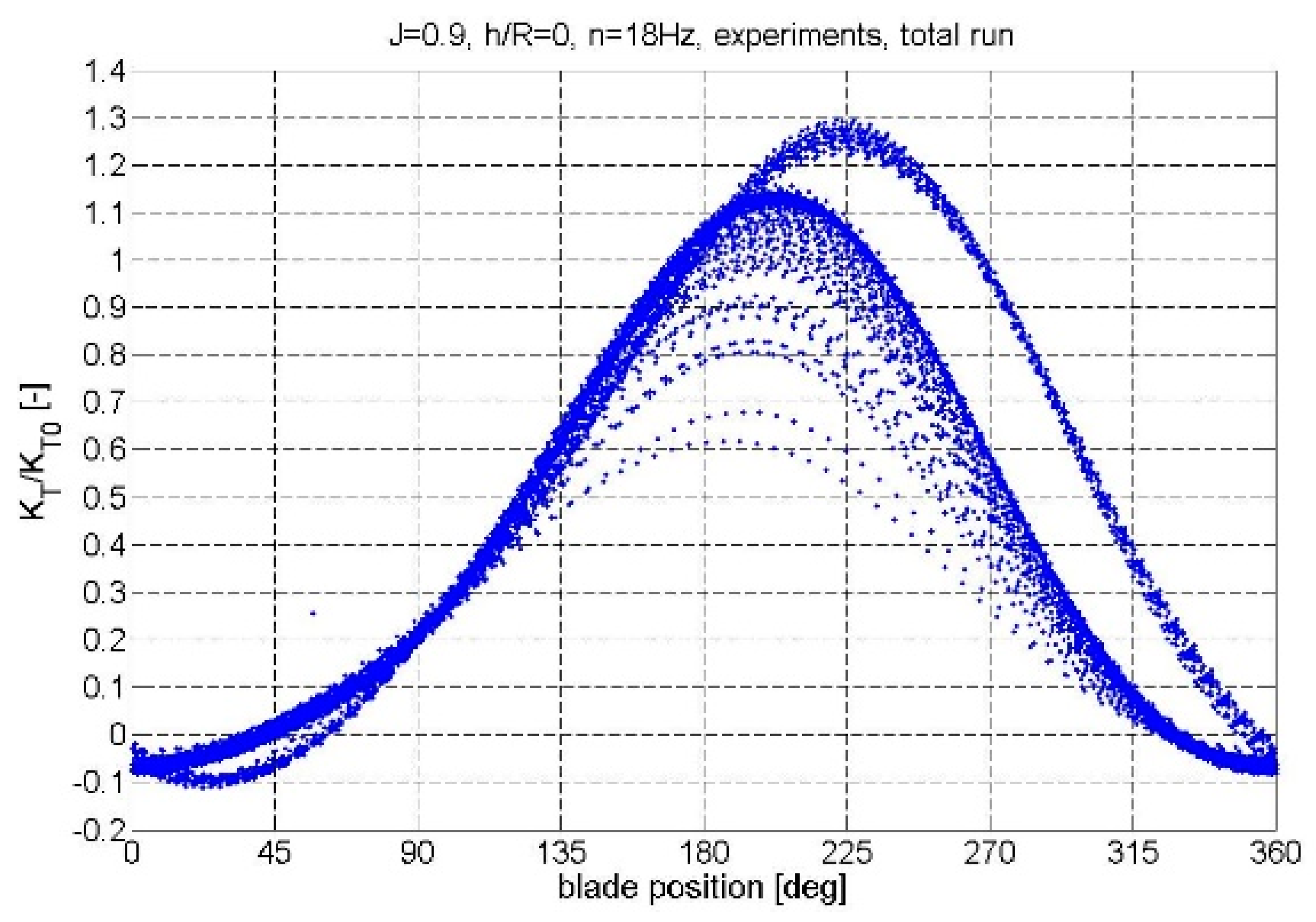
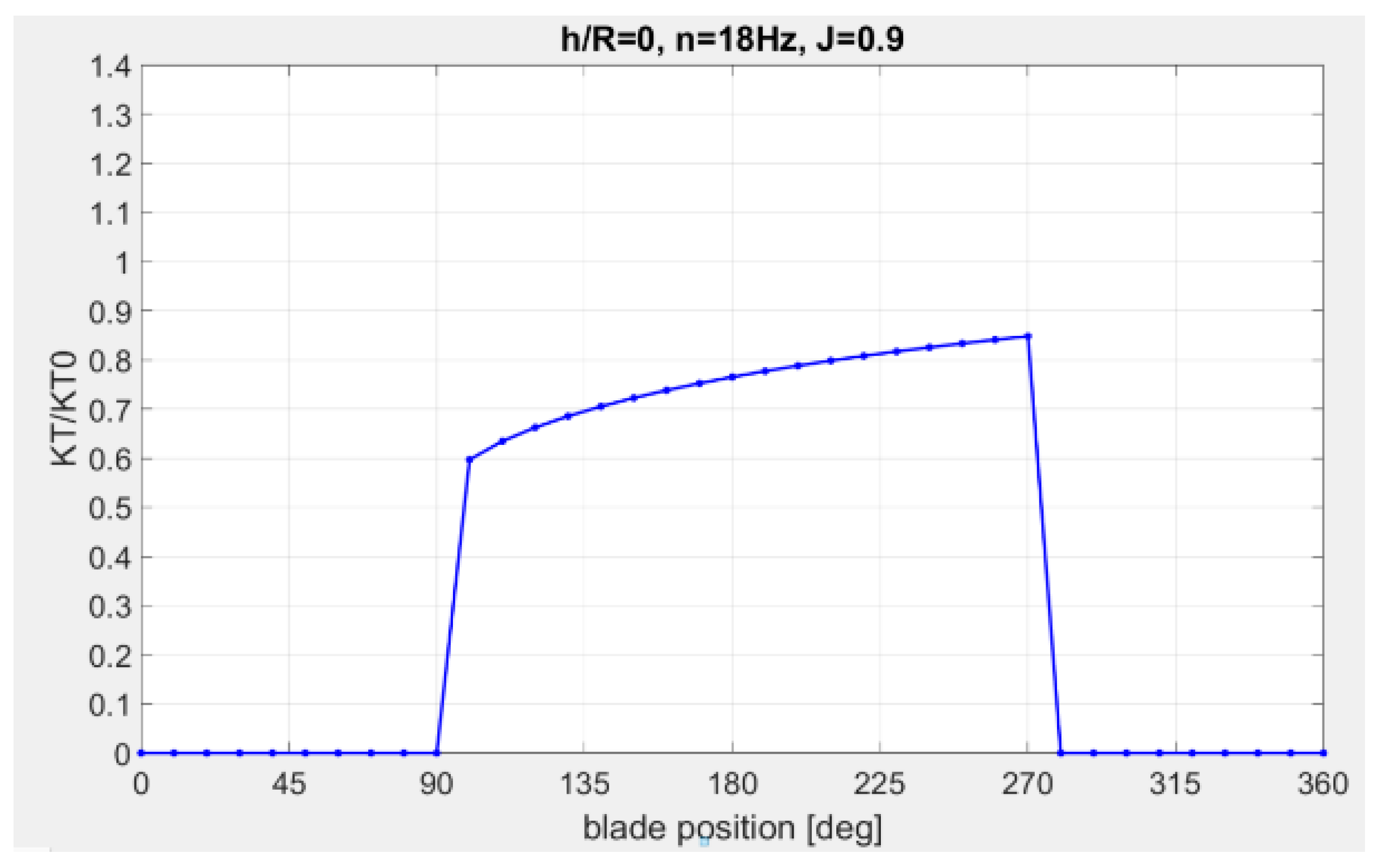
Figure 17 and
Figure 18 show the thrust variations at different blade positions in one cycle of revolution for
n = 18 Hz and a high advance number
J = 0.9. For these cases, the propeller is half submerged, so a different thrust loss is a consequence of a combination of the out-of-water effect, Wagner effect, and ventilation.
Figure 17 and
Figure 18 show similar agreement for a high advance number as for a low advance number. In the experimental results, the thrust has a peak around 200°, i.e., after the blade has passed its lowest position. This can be explained by air dragged down by the propeller blade, causing loss of effective propeller blade area, which means that it will take a longer time for the thrust to build. In the proposed method, however, the thrust continues to increase until the lifting line leaves the water. Similar to a low advance number, this is due to the included Wagner effect. The thrust loss caused by air dragged down by the propeller blade does not vary along one revolution in the proposed method because it is calculated based on propeller submergence, not blade submergence. This is why a similar displacement of the thrust (relative to the bottom blade position) is not visible in the proposed method. The integrated value of thrust will, however, have its center around 200° in the proposed method, similar to the experimental results.
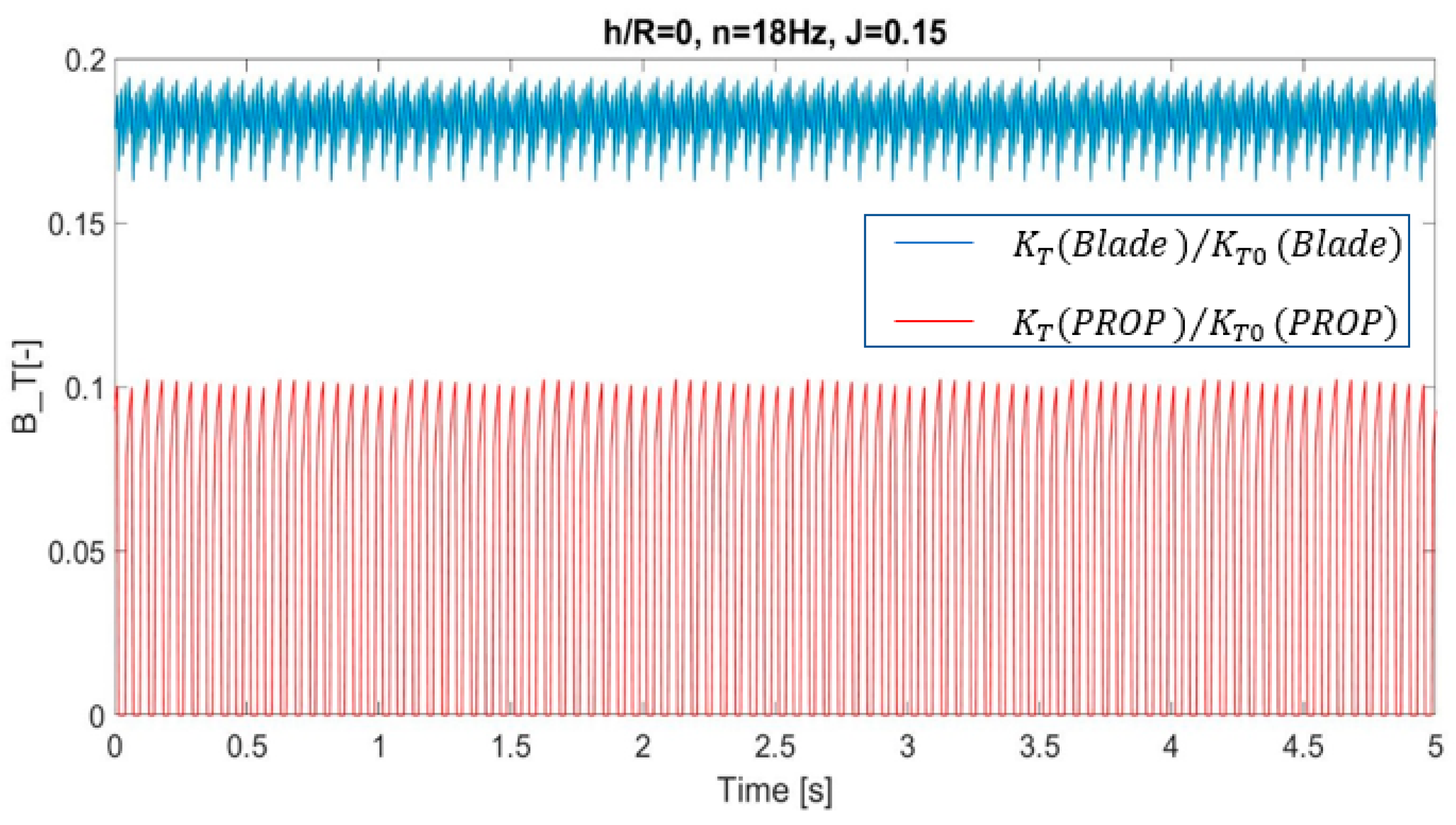
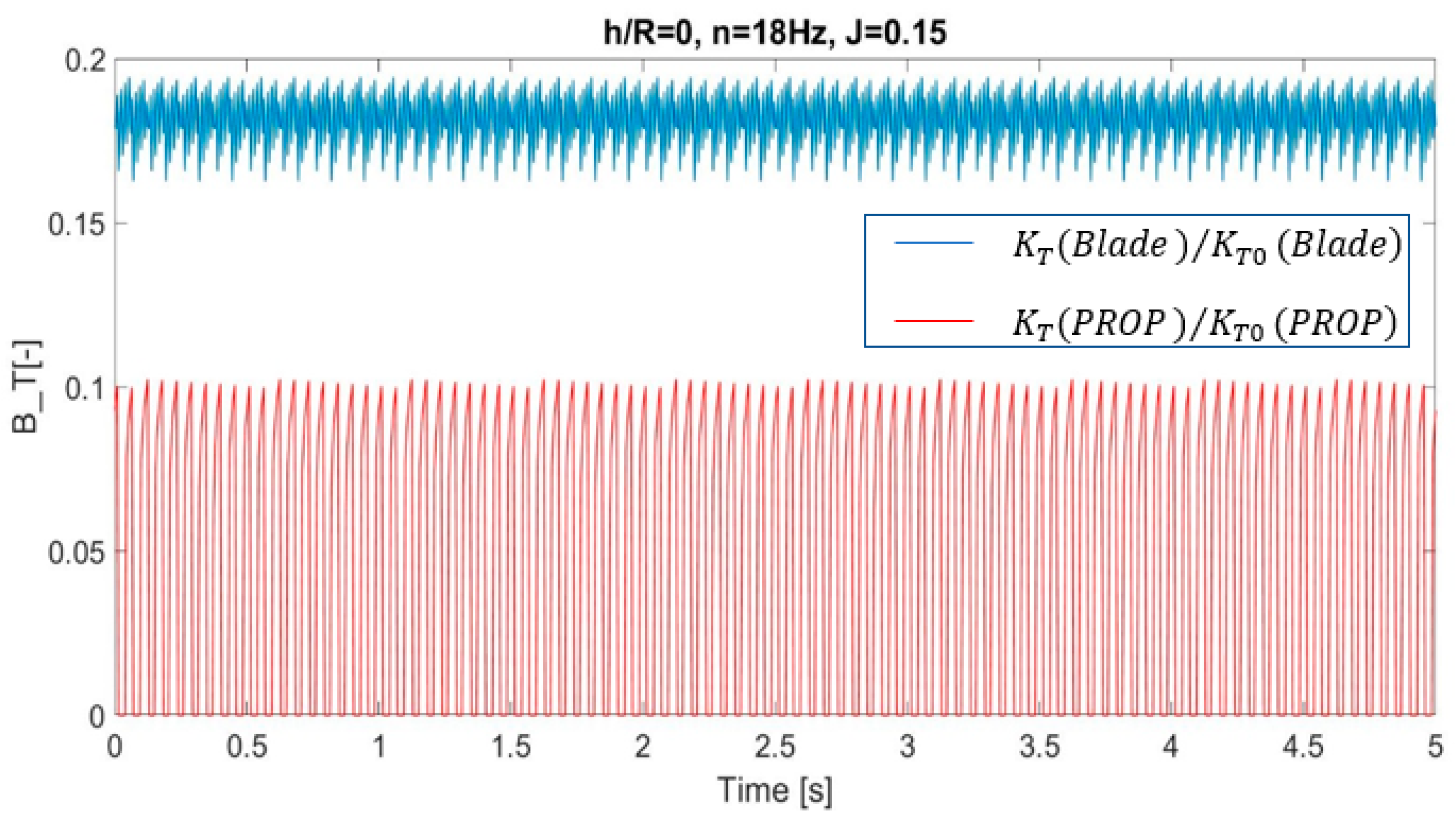
Figure 19 shows a time series of the computed thrust coefficient for a single blade and the propeller for
J = 0.15,
h/R = 0,
n = 18 Hz made using the PropSim (2018_blade_dynamics) simulation model.
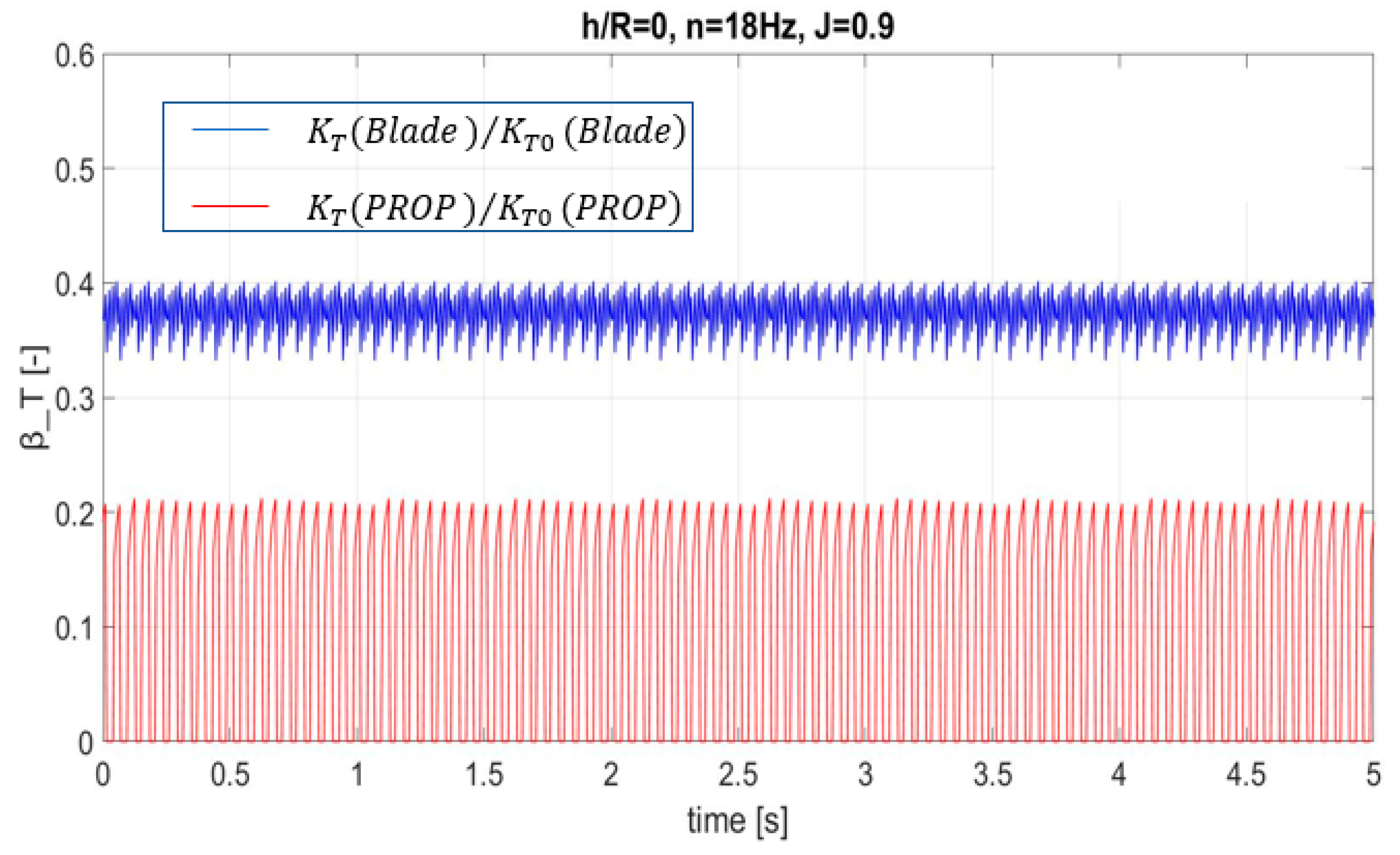
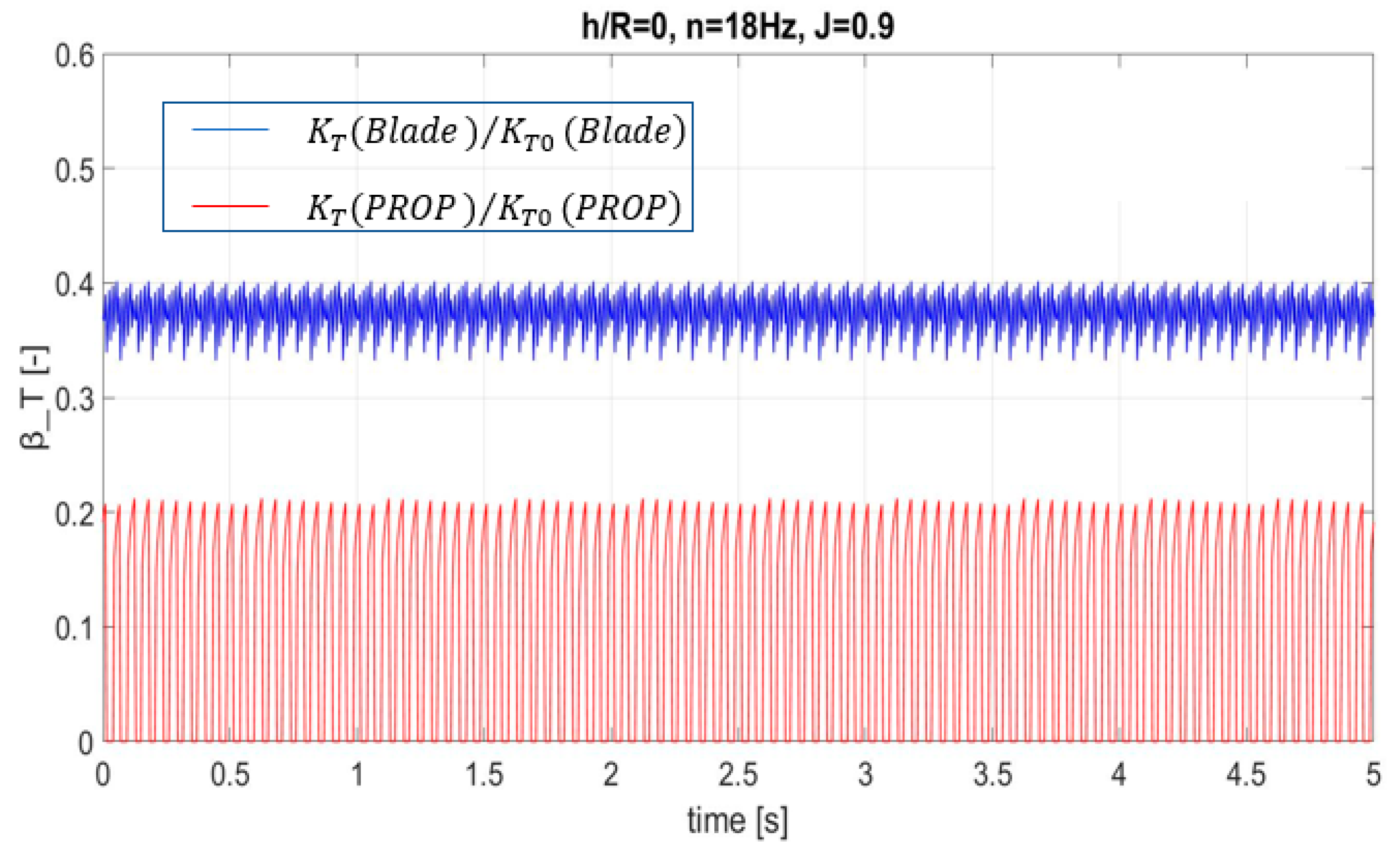
Figure 20 shows a time series of the computed thrust coefficient for a single blade and the propeller for
J = 0.9,
h/R = 0,
n = 18 Hz made using the PropSim (2018_blade_dynamics) simulation model.
Figure 19 is presenting results from the same computation as
Figure 16, while
Figure 20 is presenting results from the same computation as
Figure 18. However, in
Figure 19 and
Figure 20, thrust loss is presented as function of time instead of angular position. Note also that while
Figure 16 and
Figure 18 use a thrust loss factor dividing the actual blade thrust with the nominal (non-ventilated) blade thrust,
Figure 19 and
Figure 20 are using a factor where the actual thrust is divided with the total propeller thrust.
Both
Figure 19 and
Figure 20 show how the amplitude of variation decreases, and how the dominating frequency of the variation is increasing for the entire propeller compared to a single blade.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}