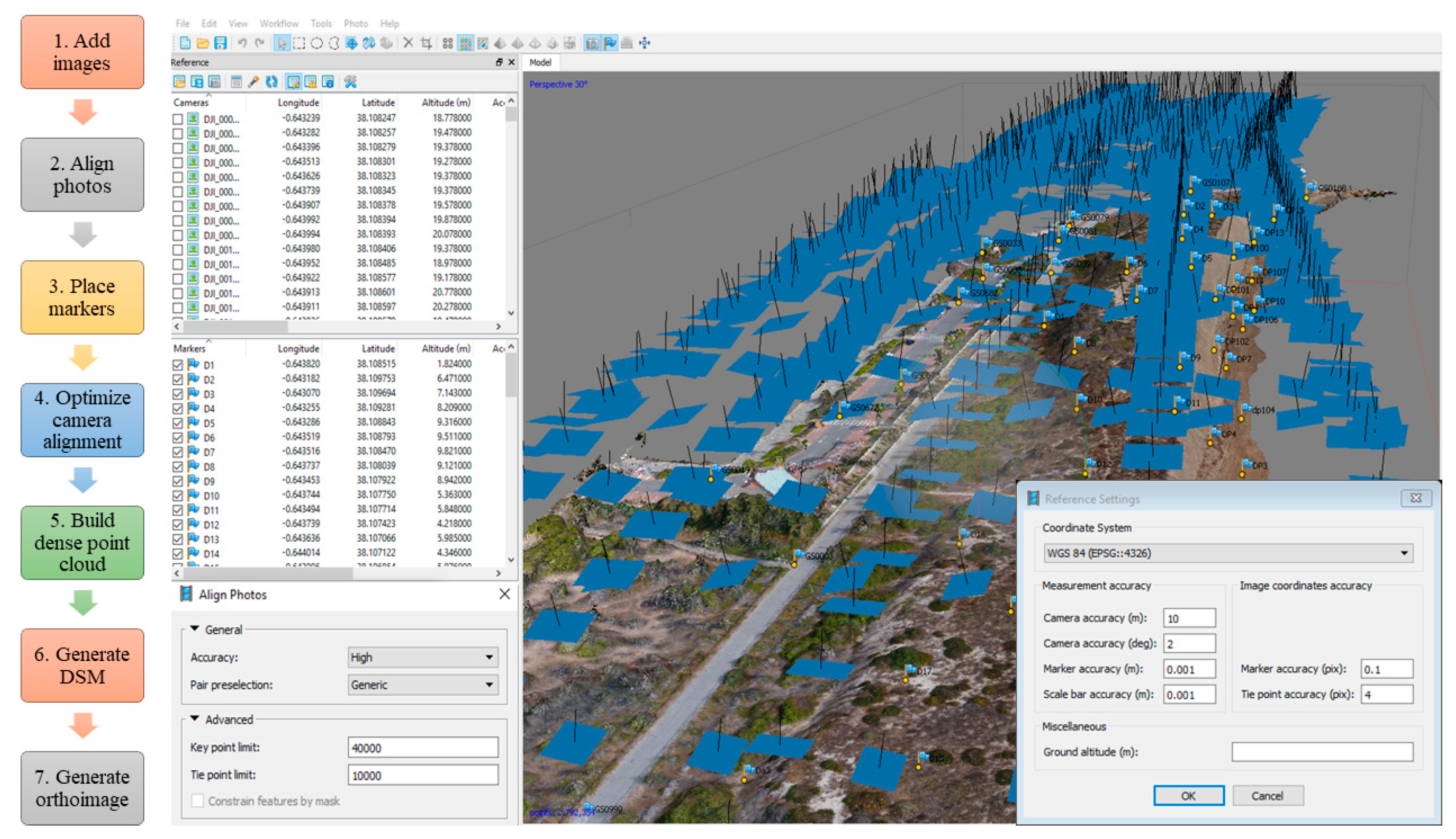
3.1. SfM Process Results
The main parameters resulting from the SfM process are presented in
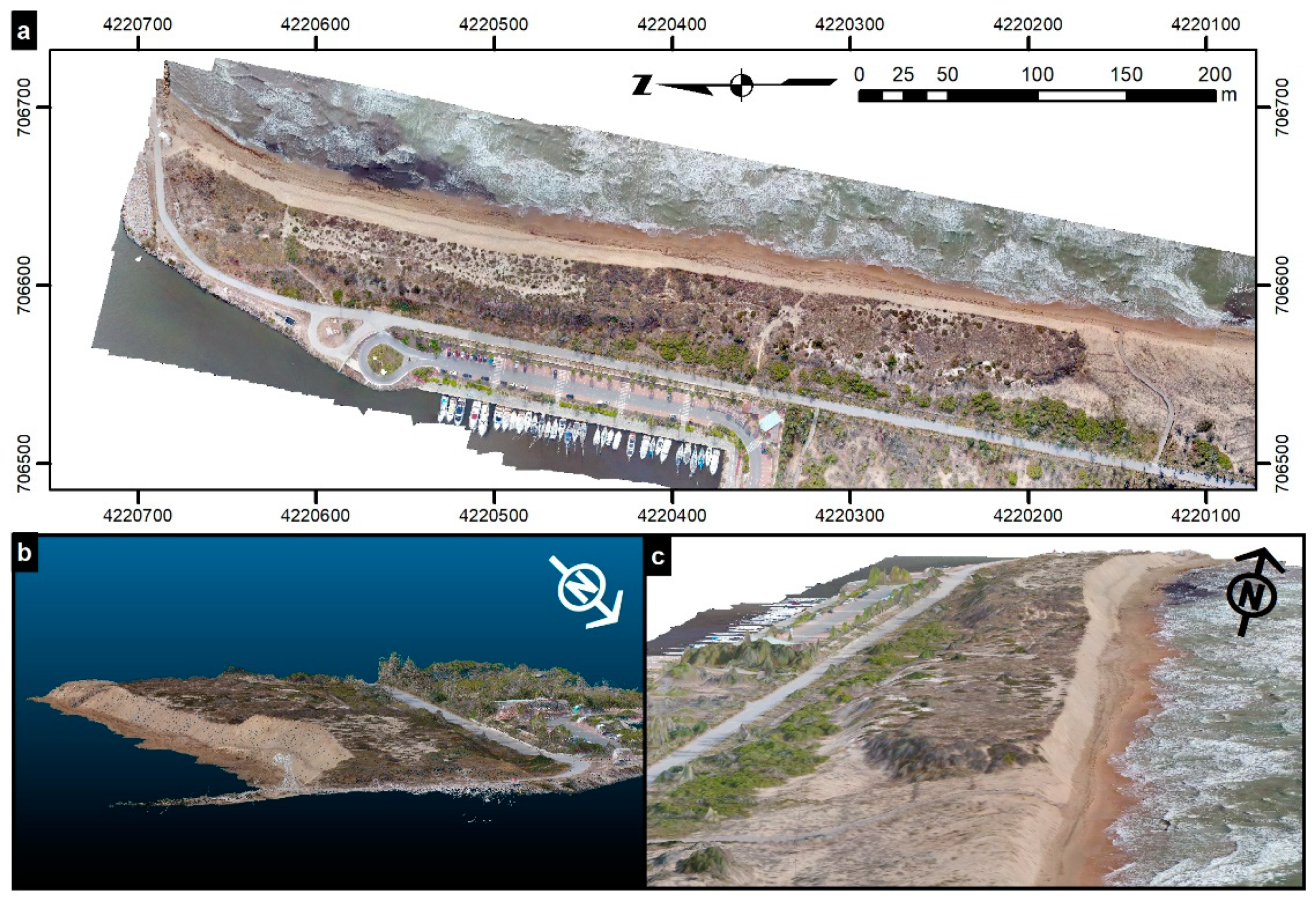
Table 2. After processing the images obtained from the two flights, the resulting orthoimage (
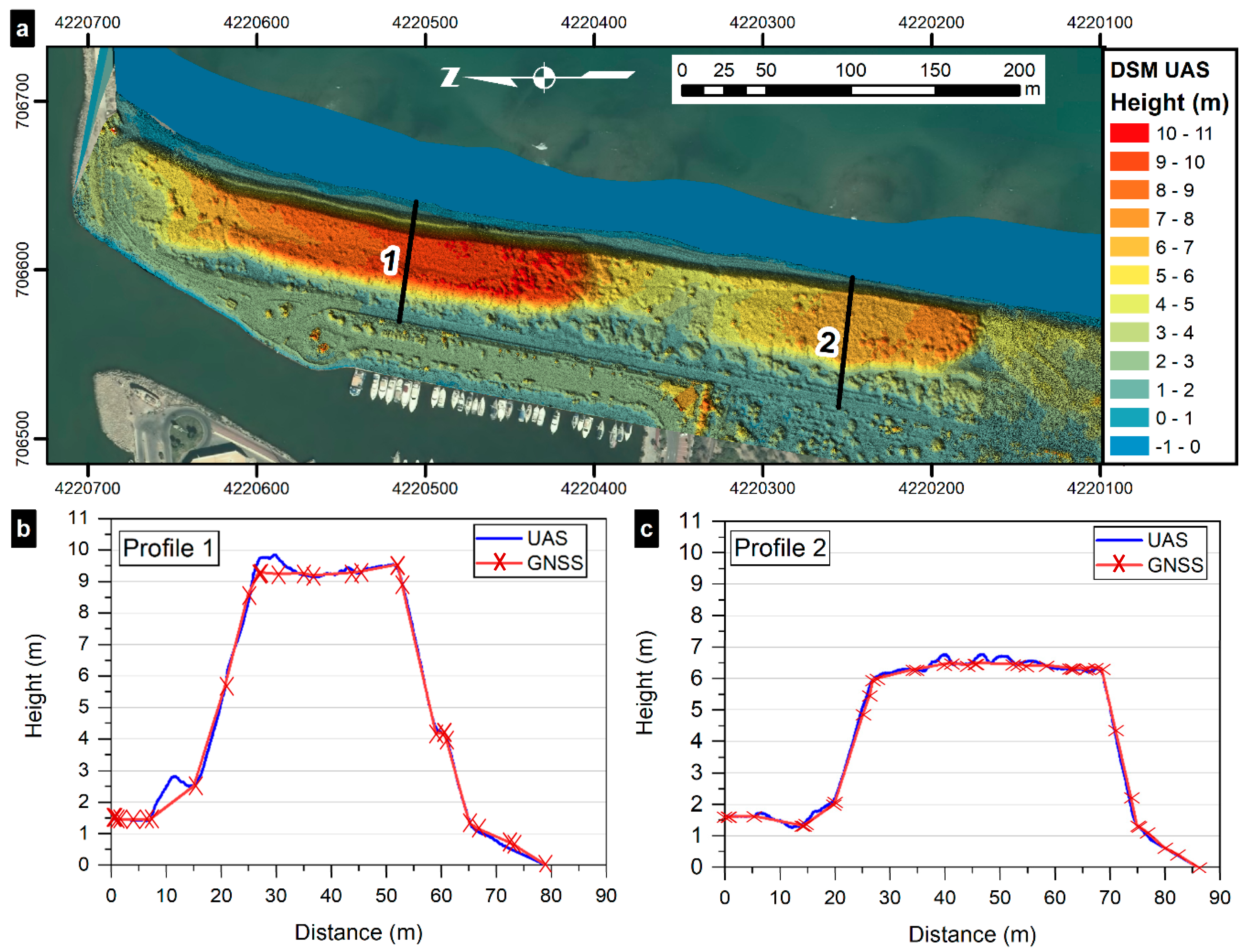
Figure 6a), the DSM, and the dense point cloud (
Figure 6b) were merged into a single dataset for the entire area of study. Almost 2.8 million points form the dense point cloud, which constitutes a three-dimensional model of the surface, with an average density of nearly 30 points per square meter. The digital surface model of the study area was created from the dense point cloud (
Figure 6c), with a mean planimetric accuracy of 0.089 m and 0.079 m accuracy for elevation data. The orthoimage created using the UAS imagery and the DSM showed a spatial resolution of 2.5 cm/pixel, precise enough to observe footprints left on sand dunes.
The time elapsed in each stage of the SfM process is displayed in
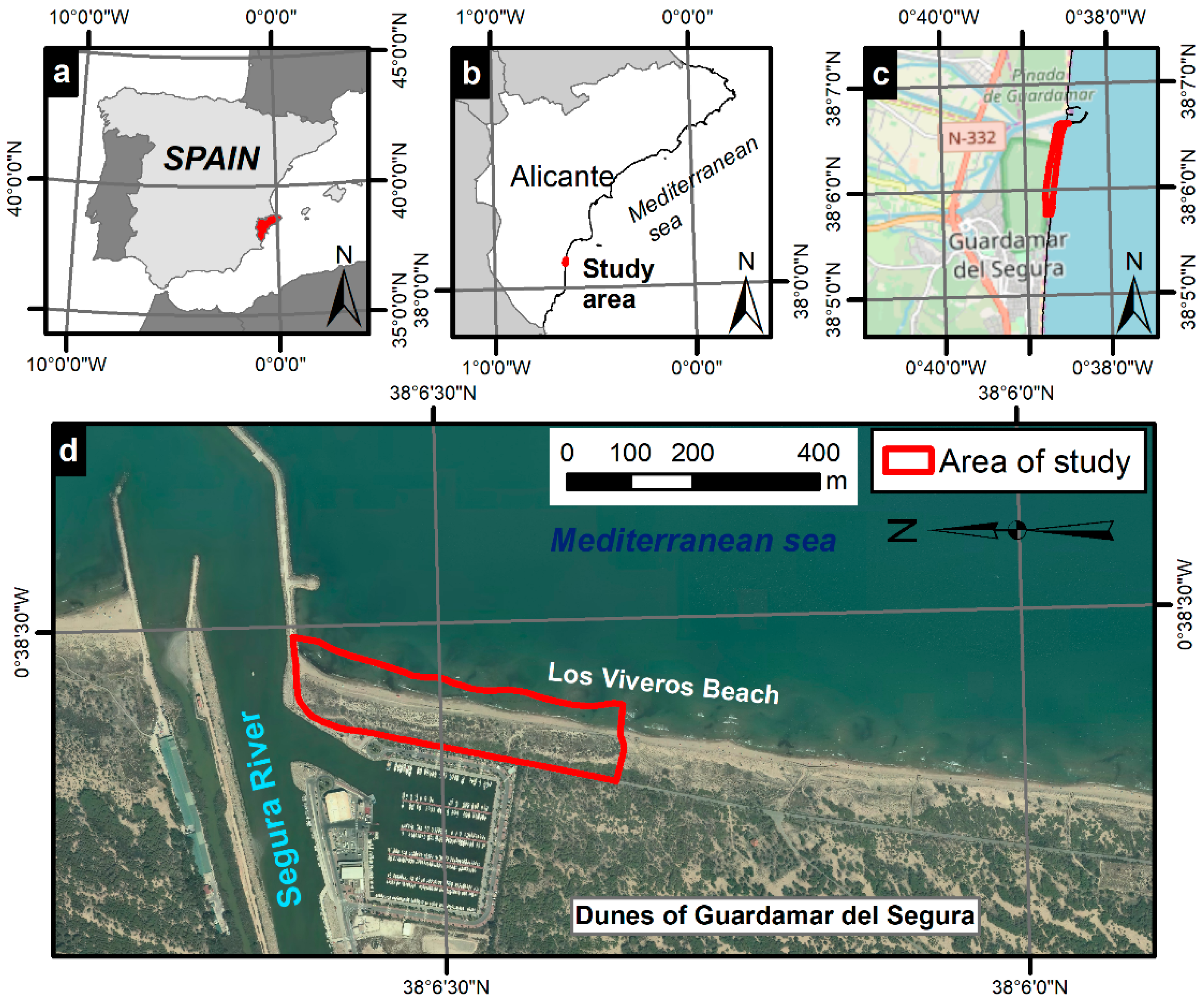
Table 3. The most time-consuming step was the GCP markers placement, as this task requires human intervention to refine the position of each marker in every image. Because of the high quantity of images and GCPs used (8–12 visible GCPs per image), it took a time span of nearly 5 hours to finalize this phase. The image alignment was the second most time-consuming stage, followed by the dense point cloud generation. Note that these time frames are closely related to the computational power of the computer utilized, so they can be shortened by simply using more powerful computers. The overall time required to complete all the stages of the SfM process was 10 hours and 37 minutes. Nonetheless, in view of the amount of time and labor needed to carry out classical ground surveys, the photogrammetric techniques employed by UAS offer superior performance.
As previously mentioned, dunes are complex surfaces to model, so for this study it was necessary to take such a high number of GCPs. On less complex areas, such as the one described in [
14], taking fewer GCPs at the edges and some in the middle of the area of interest (AOI) could be sufficient. However, in this case, apart from the outer edges of the AOI, it was necessary to position targets at both edges of the dune slope (both at the crest and at the dune toe), as well as at the centre of the images. Despite that fact, the processing time could be reduced considering a lesser amount of GCPs per image, considering recent studies in similar zones as the one developed by Laporte-Fauret et al. [
32].
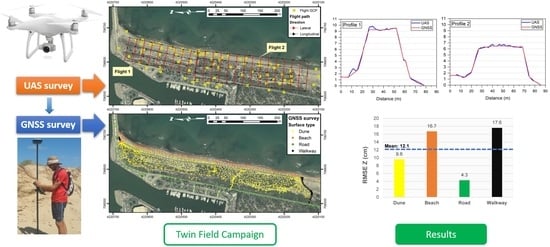
3.2. Validation of the DSM Using the GNSS Survey
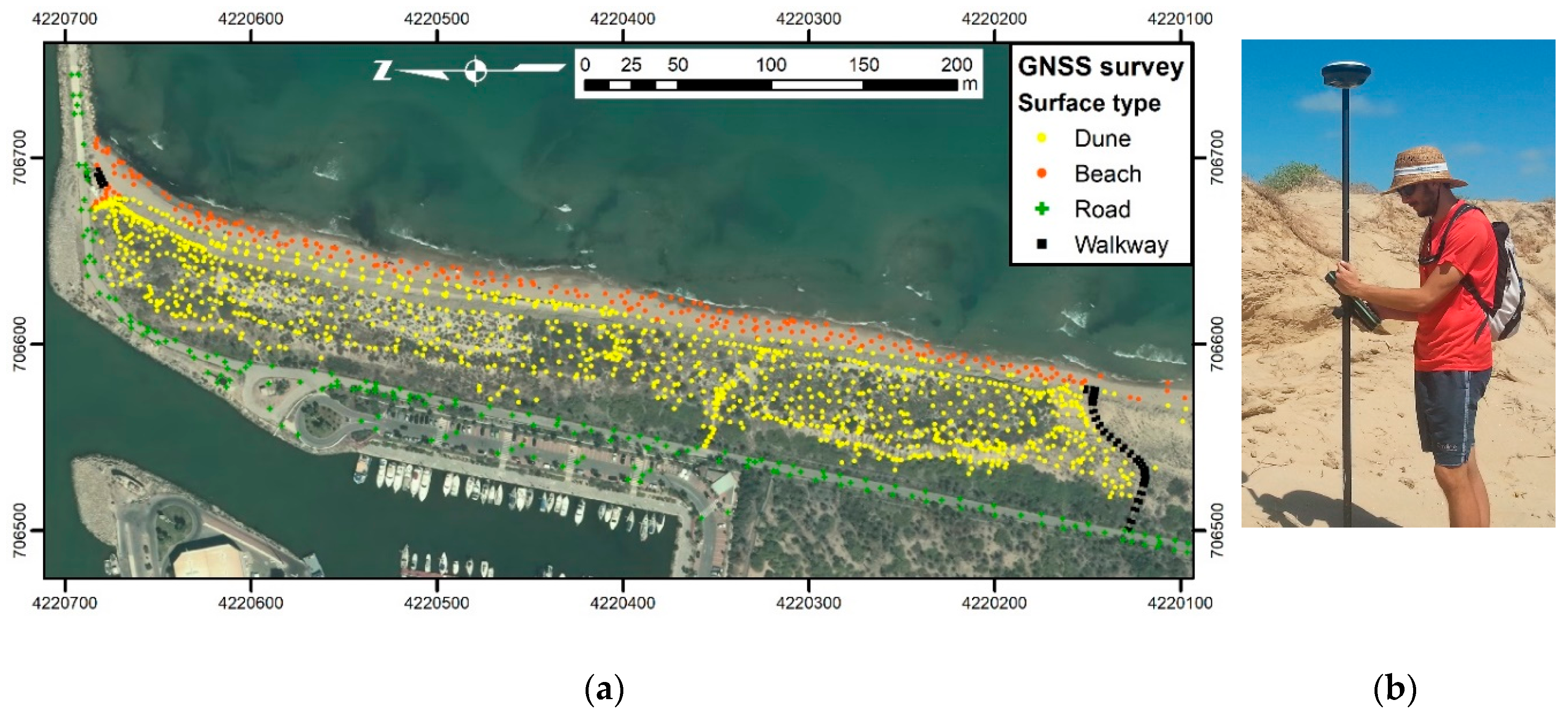
Cross-validation was performed between the measurements taken with the GNSS equipment and those taken from the DSM obtained by means of the UAS survey and SfM processing. For each collected RTK-GNSS point, the elevation of the nearest point from the UAS DSM was extracted. The mean difference (or bias) and RMSE (that is, the standard deviation of the sample) were adopted as measurement error indicators, where positive bias implies that, on average, the UAS exceeded the surveyed elevation using GNSS.
One remarkable contribution from this study is the outstanding number of validation points used in comparison with recent studies carried out in coastal environments, such as the one conducted by Laporte-Fauret et al. using similar image resolution and flight altitude [
32]. As the distribution curve of the residuals fits to a normal distribution, the minimum number of validation points
n can be obtained using the Equation (1):
where
is the standard deviation of the population,
e is the absolute sampling error, and
is the normal probability distribution value for the desired confidence level
α. In order to obtain a sampling error of 1 cm with a confidence interval of 99% (
Z99 = 2.575), the minimum sample size, that is, the minimum number of validation points to survey is:
As this study has used 1238 validation points, the results presented in this study can be assumed to be statistically representative.
The average value of vertical RMSE was acceptable (0.121 m), with a highly reduced bias of 0.0161 m, indicating a good general accuracy for performing this sort of work in this kind of environments. In fact, previous studies obtained roughly the same RMSE values [
13,
32,
33]. If we compare the obtained RMSE values for the present UAS survey with those achieved using airborne LiDAR surveys [
9,
10,
11], the accuracy is about the same, or even higher.
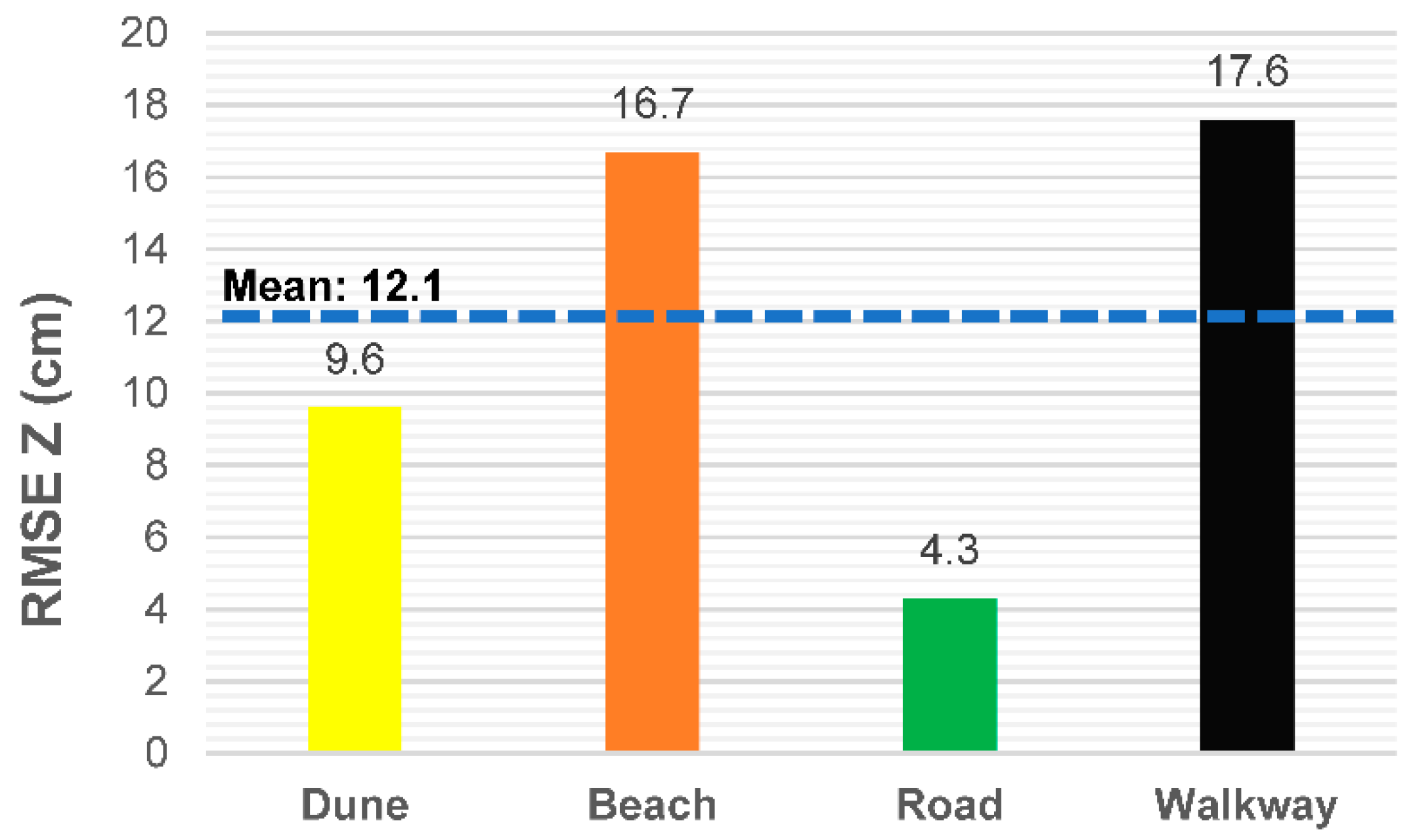
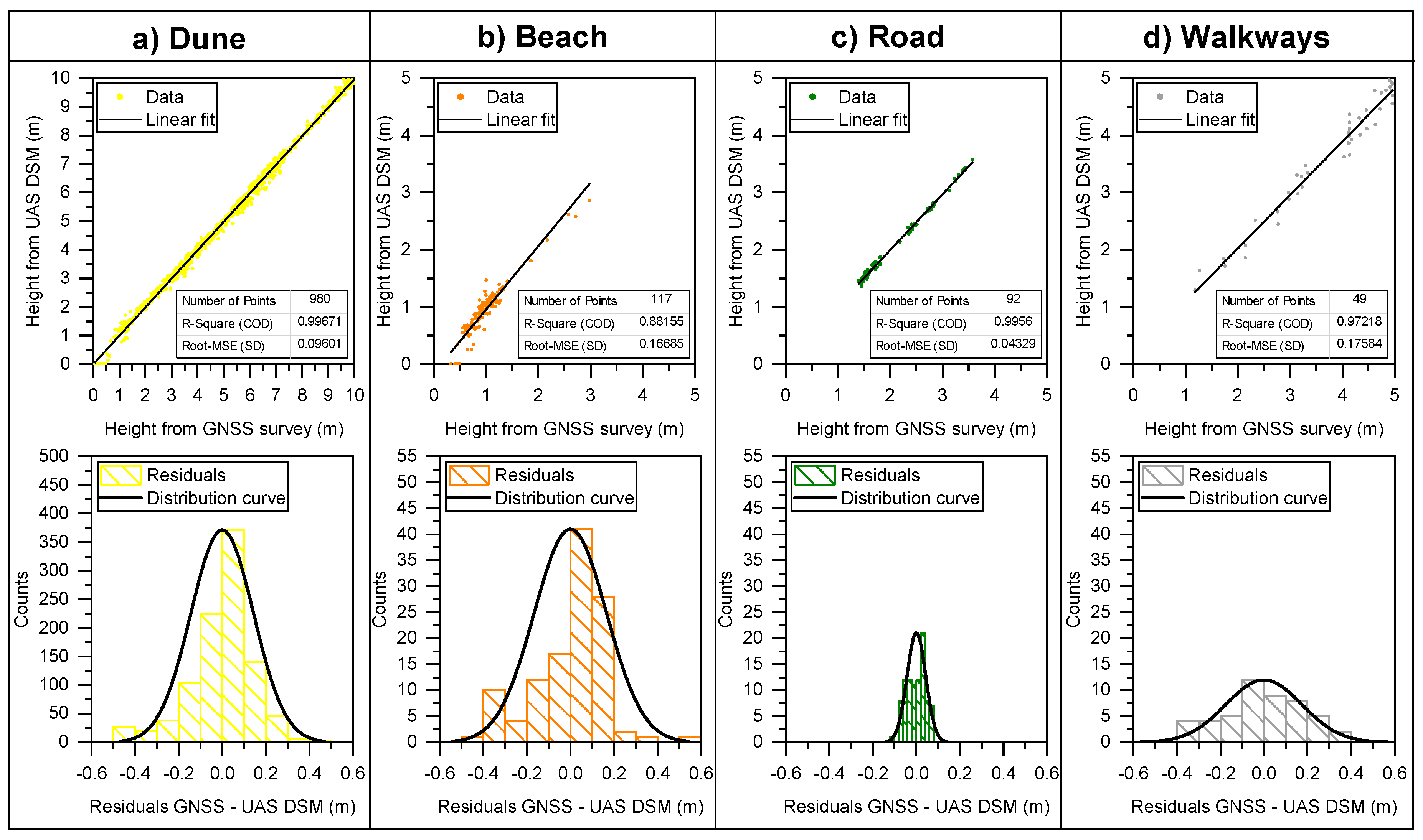
The detailed results of the vertical RMSE obtained for each type of surface are shown in
Figure 7. An analysis of the different surface types shows, in general, a good agreement of measurements and a near 1:1 fit between GNSS and UAS data, which means that the accuracy of UAS measurements is equivalent to the obtained GNSS point dataset. The coefficient of determination (COD) values obtained are greater than 0.97 in all of the surface types, except for beach points, where it is close to 0.90. The residuals graphs show similar distribution curves, with mean errors close to zero (
Figure 8).
It is commonly accepted that the threshold to determine if a point has been accurately measured or not is that its residuals are below twice the standard deviation (that is, twice of RMSE value).
Table 4 provides the fit equation parameters, which provide an error correction based on the surface type that other authors can use to quantify DSM uncertainty; for instance, in flood studies, where resolving curbs and pavements can alter flood wave propagation. The table also shows the validation threshold and UAS accuracy values. Overall, 93.2% of the points were accurately measured. In roads and walkways, only one point is over the validation threshold, which means an accuracy of more than 98% (note the variation caused by the different number of points surveyed). The points surveyed in the beach area also have an accuracy of more than 90%. Finally, 84.4% of the 980 points surveyed in the dune area are below the validation threshold, showing a fairly good RMSE Z value of 0.096 m.
However, some differences in accuracy appear when the different surfaces are considered separately. The results show a similar trend to those obtained by Elsner et al. [
33]. In this case, DSM data show little systematic differences on the asphalt surface (RMSE Z of 0.043 m), but a more significant divergence on the beach area (RMSE Z mean value of 0.167 m). One of the possible causes that explain that value is the low optical contrast of the beach surface. Homogeneous or reflective surfaces are often problematic for the image matching stage, which leads to a high number of outliers [
33]. Surfaces with a heterogeneous and distinct texture are preferred for a more accurate image matching process [
34]. The problem of “smooth” surfaces, such as the sand in a beach area, is also highlighted in [
35], making them very difficult zones from which to extract highly accurate SfM topographic datasets. This reason might explain the relatively low performance of the UAS-based DSM model when validated using GNSS control points. In the dune zone, however, the presence of shadows cast by the shape of the dune and the existing vegetation helps to increase the heterogeneity of the surface, hence the RMSE value for elevation is considerably lower than on the beach, which is a flat extension of homogeneous sand. The road is a surface with greater contrast than the wooden walkway, the color of which is very similar to the surrounding sand. In consequence, the RMSE Z value in the first surface is lower than in the second case.
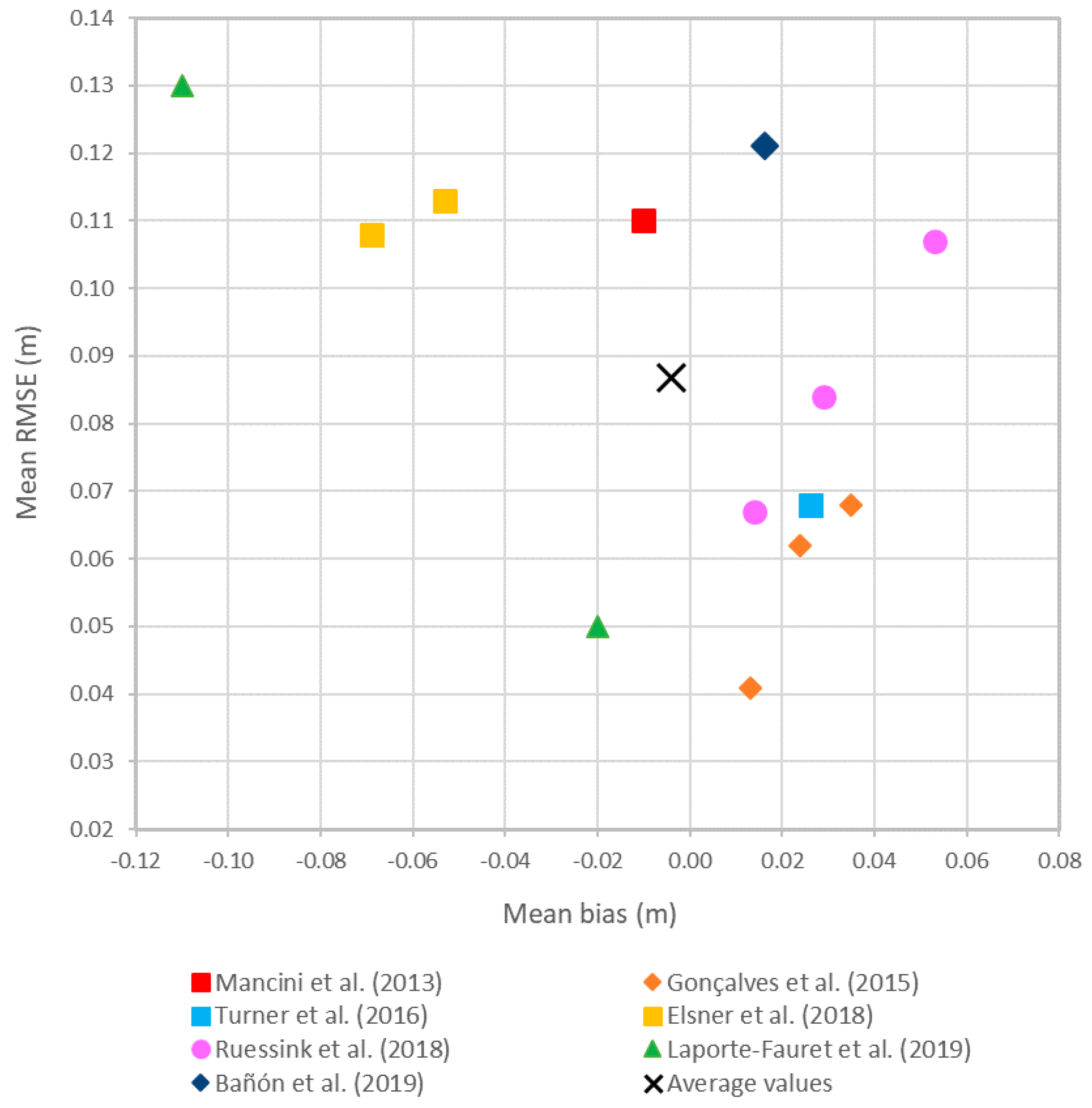
Table 5 develops a comparison between previous coastal surveys, indicating the main parameters used for the flight campaign and the vertical accuracy obtained in terms of bias and RMSE. The results show RMSE values ranging from 0.041 m to 0.13 m, with an average value of 0.087, and bias values from ±0.01 to ±0.11, with a mean value very close to zero. Regarding the uncertainty of the GNSS measurements (usually from ±15 to ±20 mm), the different studies show a consistent and similar accuracy, which could be sufficient for surveying this kind of environment.
Figure 9 shows a graphical comparison between the different accuracy values from the studies mentioned in the previous table. It can be seen that the present study comparatively obtains a better value for bias and a higher RMSE value but is very close to some of the analyzed studies. This could be due to the reasons previously described in this article.
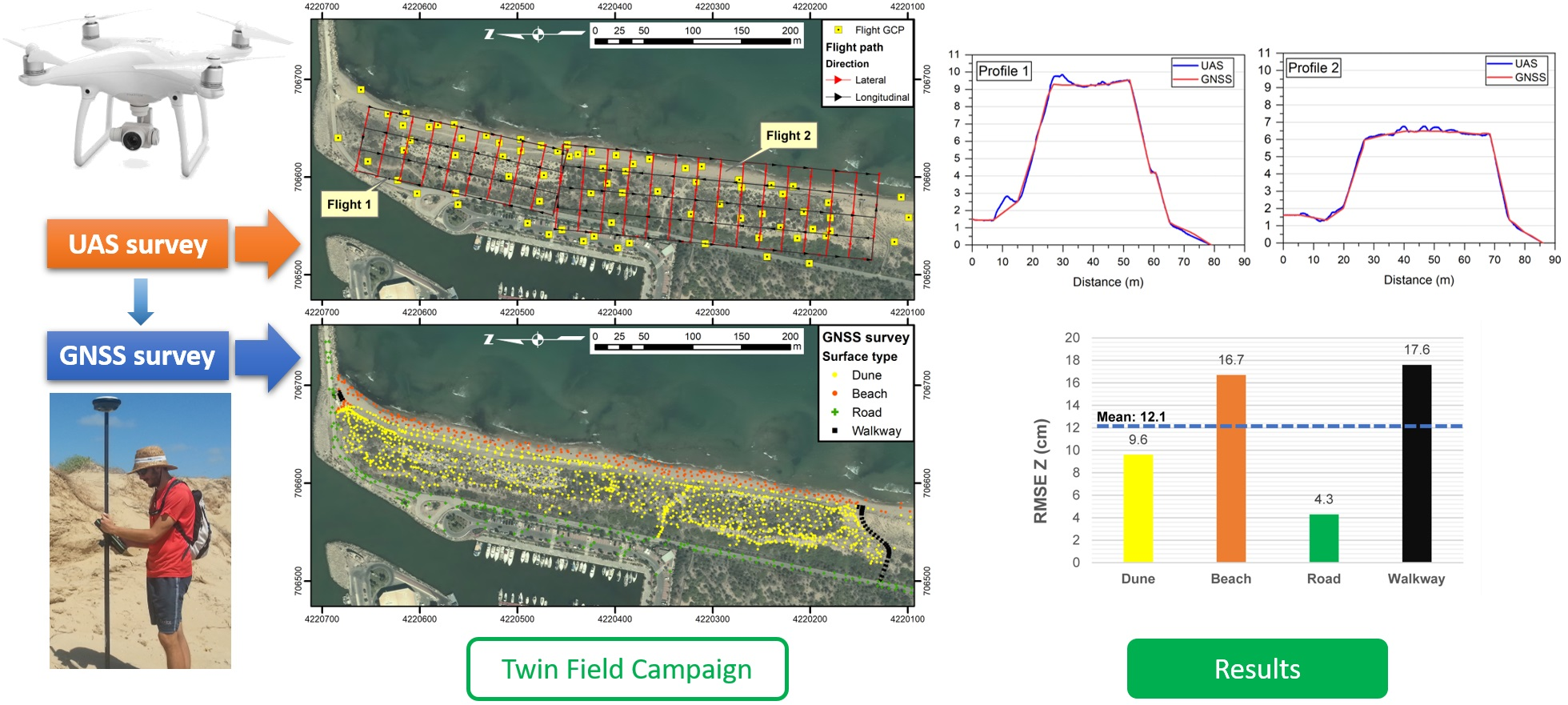
3.4. Final Remarks
The novelty in this research is the extensive field survey by GNSS conducted together with the UAS survey. The complexity of the surveyed surface and the homogeneity of the sand may affect the process to create a DSM using the UAS image-based photogrammetry [
33,
34,
35]. For that purpose, 77 GCPs and 1238 validation points were surveyed, a much higher volume than previous recent studies [
13,
32,
33], obtaining statistically sound results. With this wide field survey, this research also outlines the significant reduction in time and costs obtained using UAS and SfM technologies instead of classical GNSS surveys (
Table 7). The surveying time is dramatically reduced from 720 to 30 min, permitting more surface area to be covered within the same session. That is an important factor, especially for extensive zones, such as beaches or dune fields. The model generation time using the SfM methodology could be easily reduced by using less GCPs, as the main time-consuming task is the semi-manual marker placement (see
Table 3). Furthermore, the current times and costs will be decreasing rapidly over time as new improvements arrive to the UAS sector.
Nevertheless, there are some disadvantages to consider. Firstly, flight regulations can be restrictive in survey areas, especially near inhabited zones. Particularly, current Spanish regulations for UAS limit their use overcrowded areas without specific permission, such as beaches and over building agglomerations, and the maximum flight altitude is set to 120 m [
30]. Secondly, the generated 3D point cloud often includes elevation data coming from undesired sources—buildings, power lines, treetops, and many other elements—instead of from the ground surface, causing a partial distortion of the obtained model. There are several algorithms that mitigate or even correct some of these issues, but they usually demand near infrared (NIR) data to properly detect and filter the vegetation cover [
37]. Unfortunately, low-cost UAS are normally not equipped with them.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}