
Hybrid Obstacle Avoidance Algorithm Based on IAPF and MPC for Underactuated Multi-USV Formation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
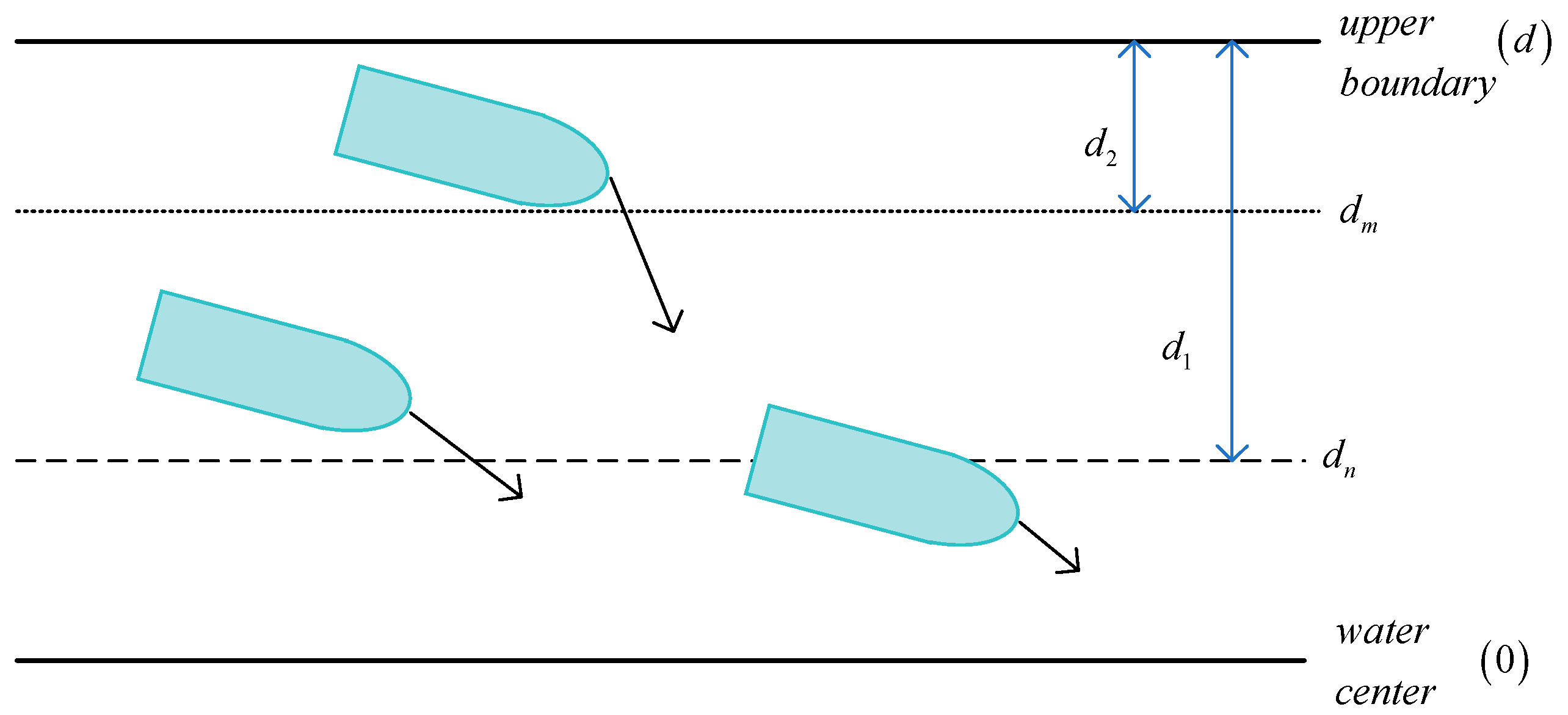
- A saturated gravitational potential field is introduced for narrow waterways to prevent formation instability due to excessive gravitational forces. Additionally, a partitioned repulsive potential field is implemented, dynamically adjusting the potential field function based on the distance between unmanned surface vehicles and a waterway boundary, thereby ensuring effective obstacle avoidance within the unmanned surface vehicle formation.
- (2)
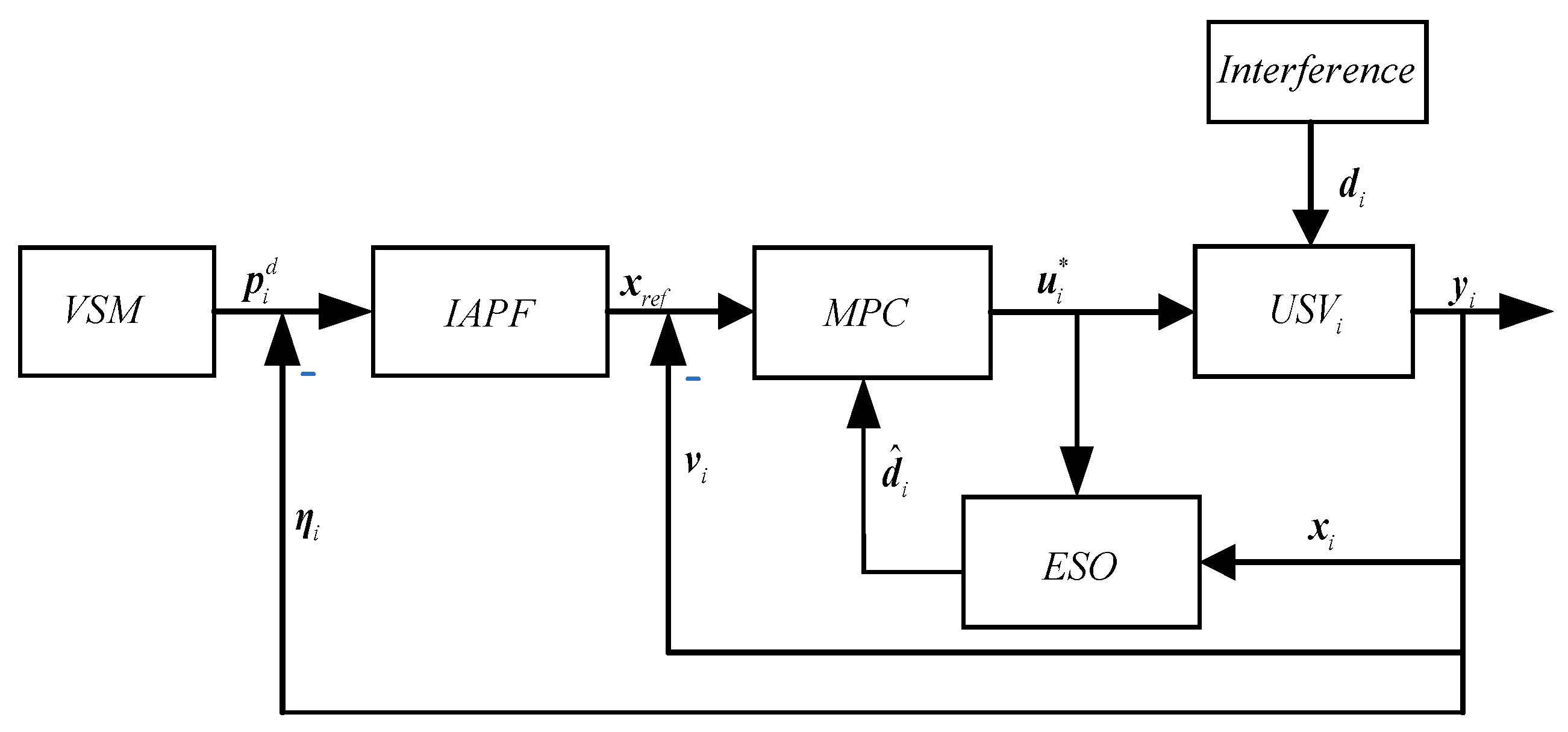
- By leveraging the multi-step prediction capability of model predictive control, the controller is designed based on the expected values provided by the enhanced artificial potential field and the disturbance estimates derived from the extended state observer, ensuring that the state and velocity vectors of the USVs in the formation asymptotically converge to the desired values.
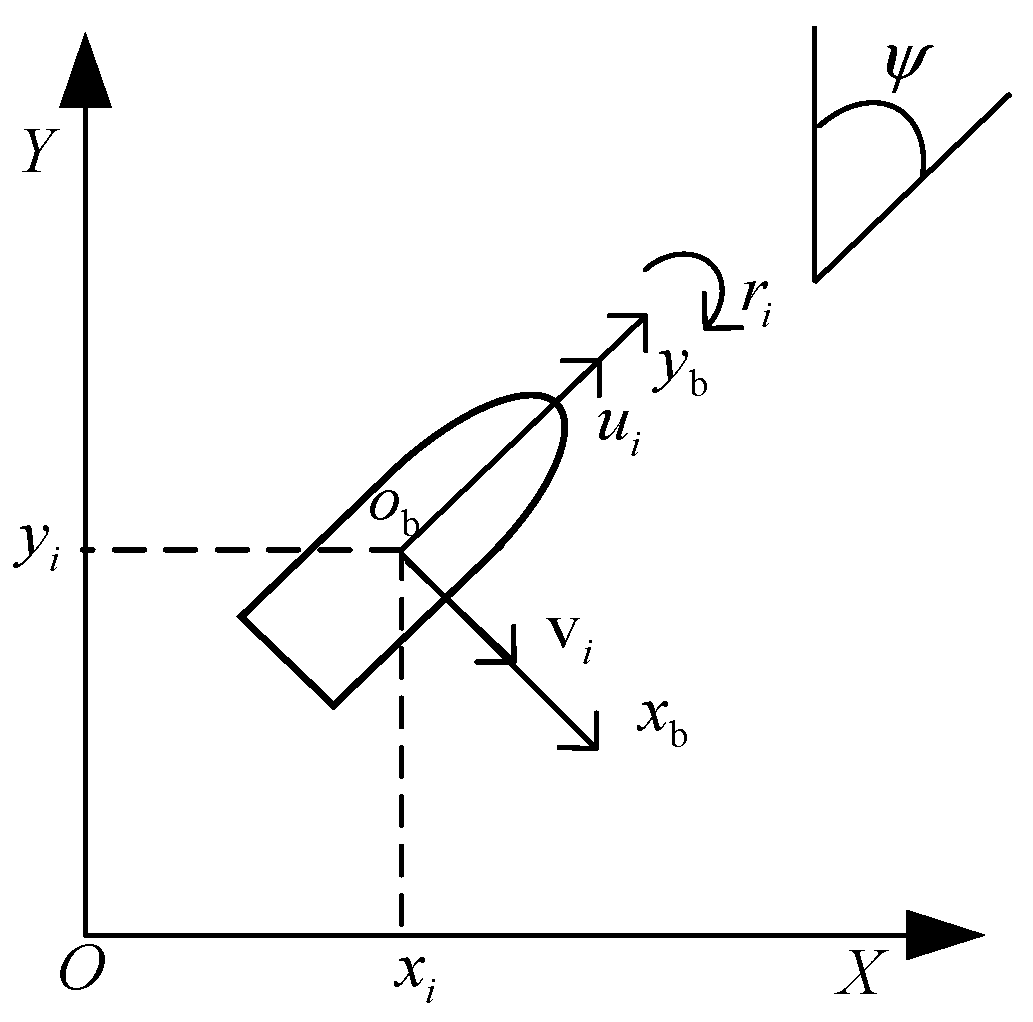
2. Problem Statement
3. Main Results
3.1. Controller Design
3.1.1. Formation Control Based on Virtual Structure
3.1.2. Improved Artificial Potential Field Method
3.1.3. Extended State Observer
3.1.4. Model Predictive Control
3.2. Stability Analysis
4. Simulation Results and Analysis
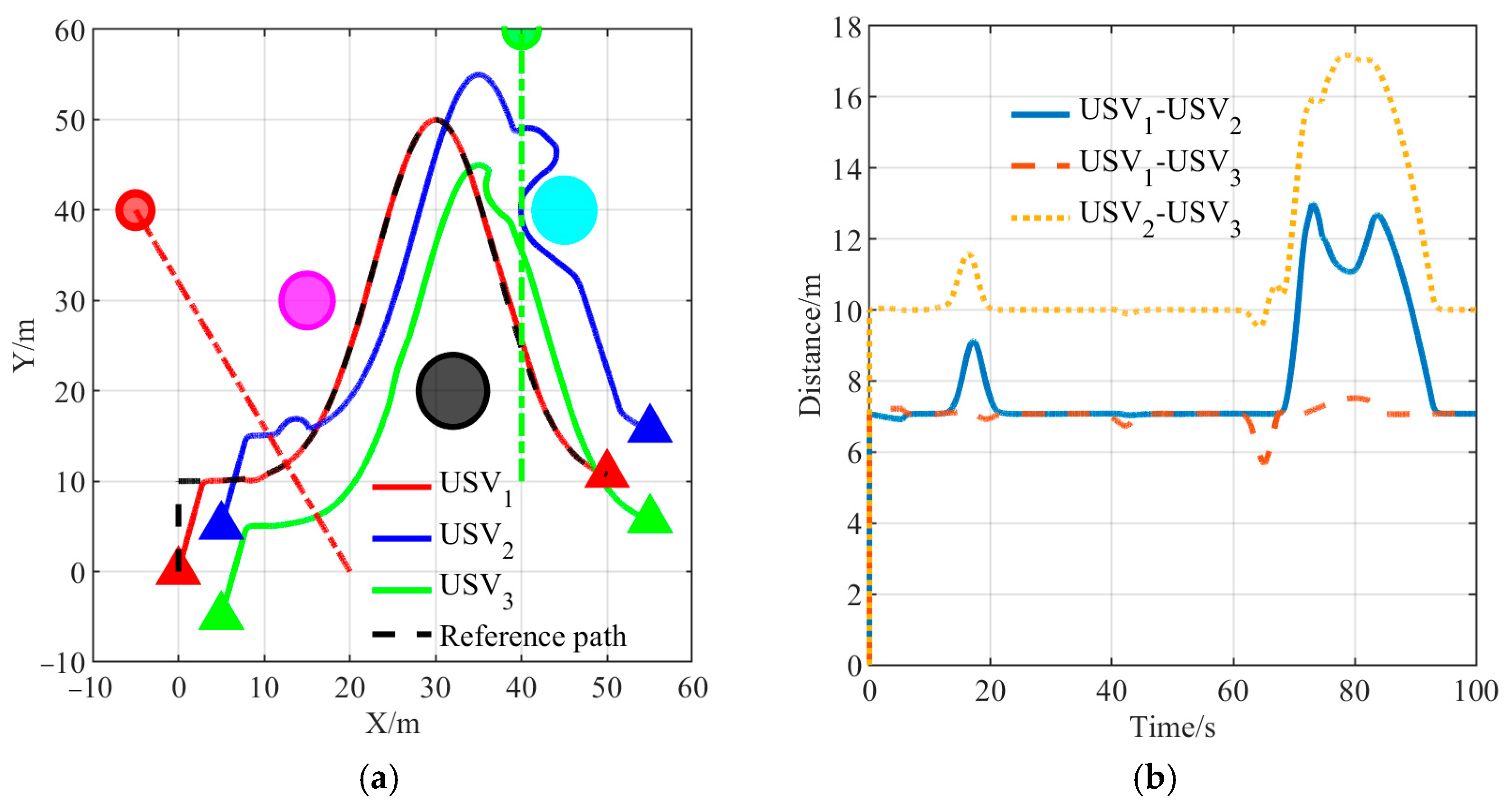
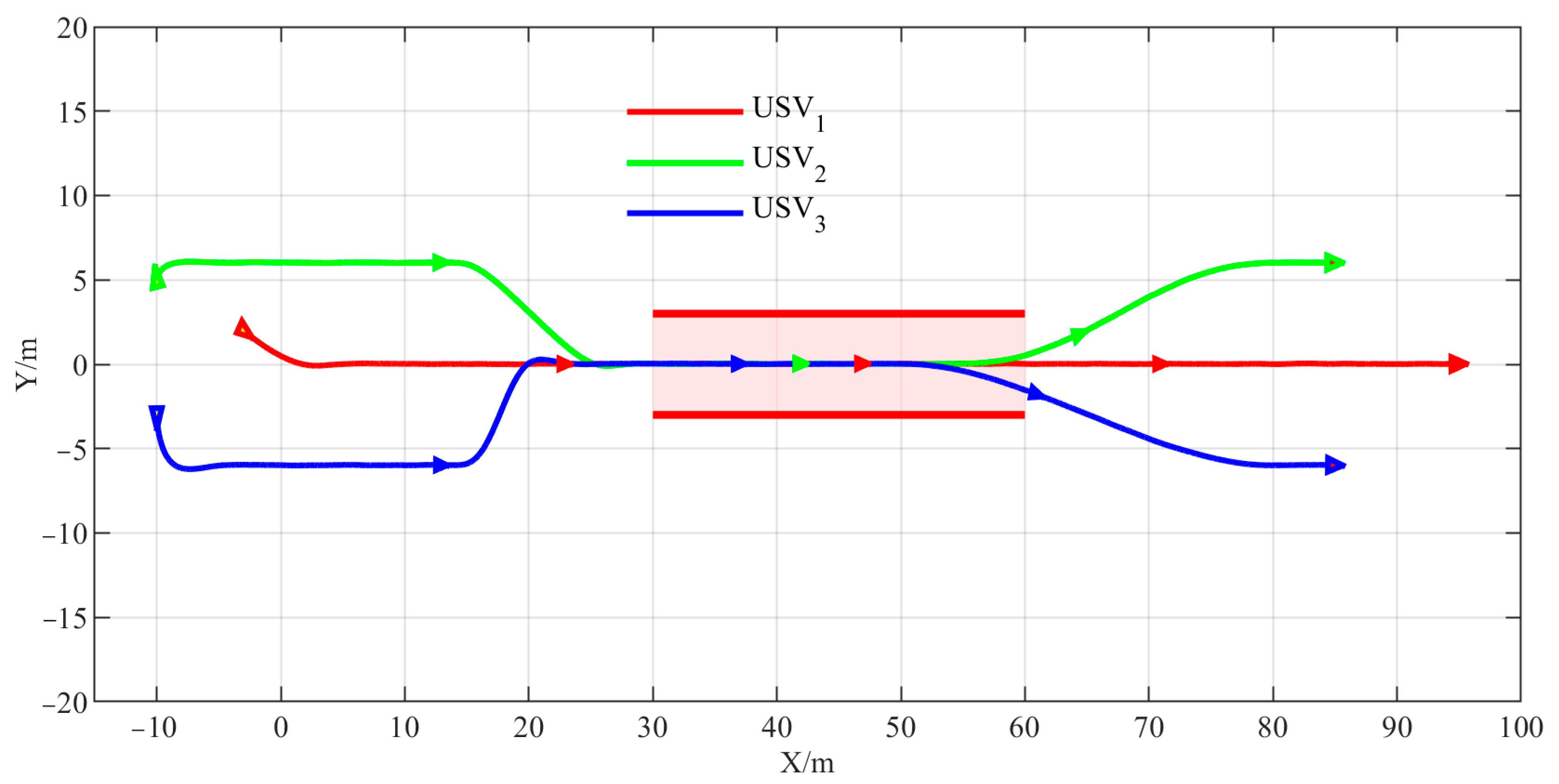
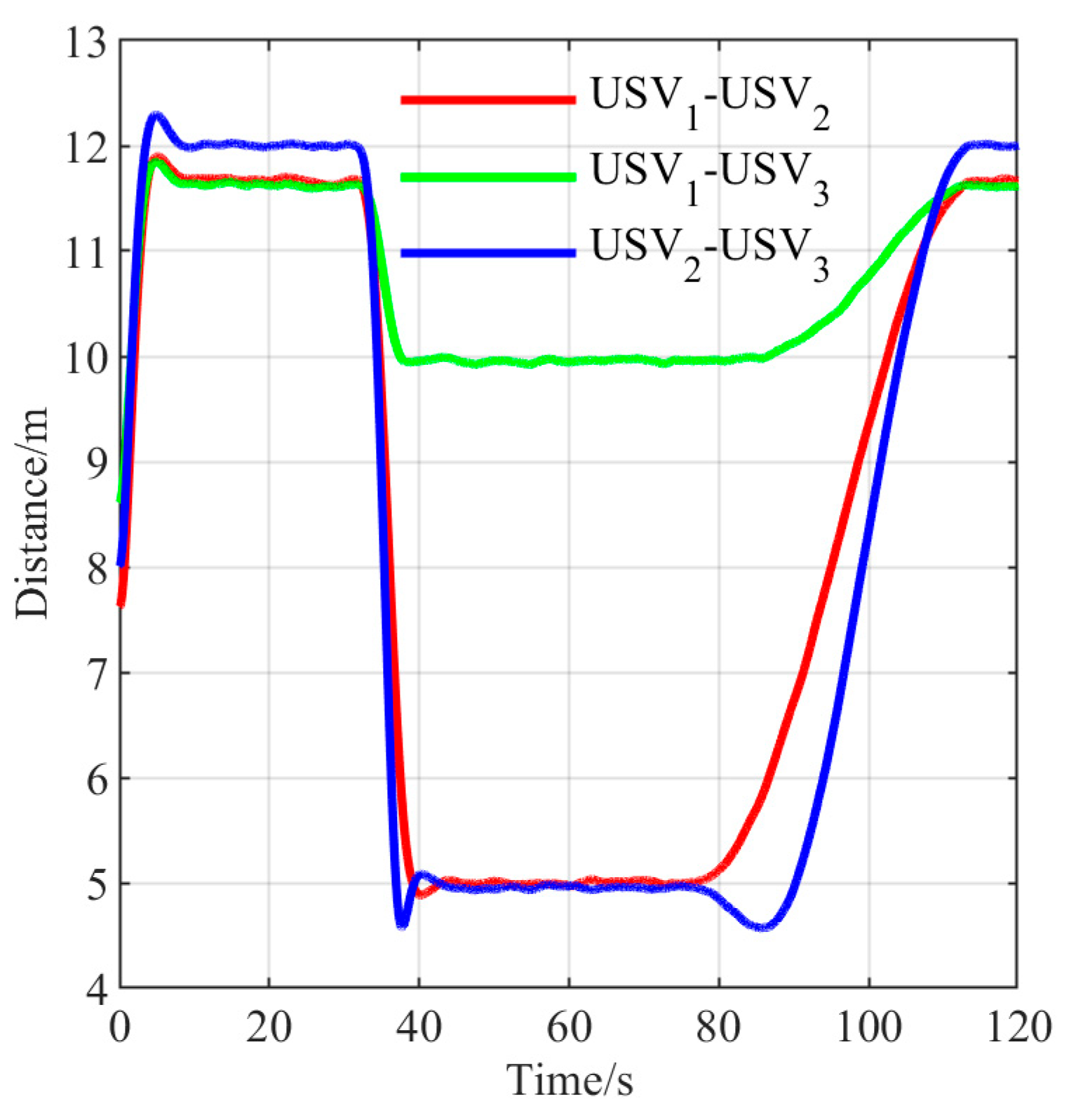
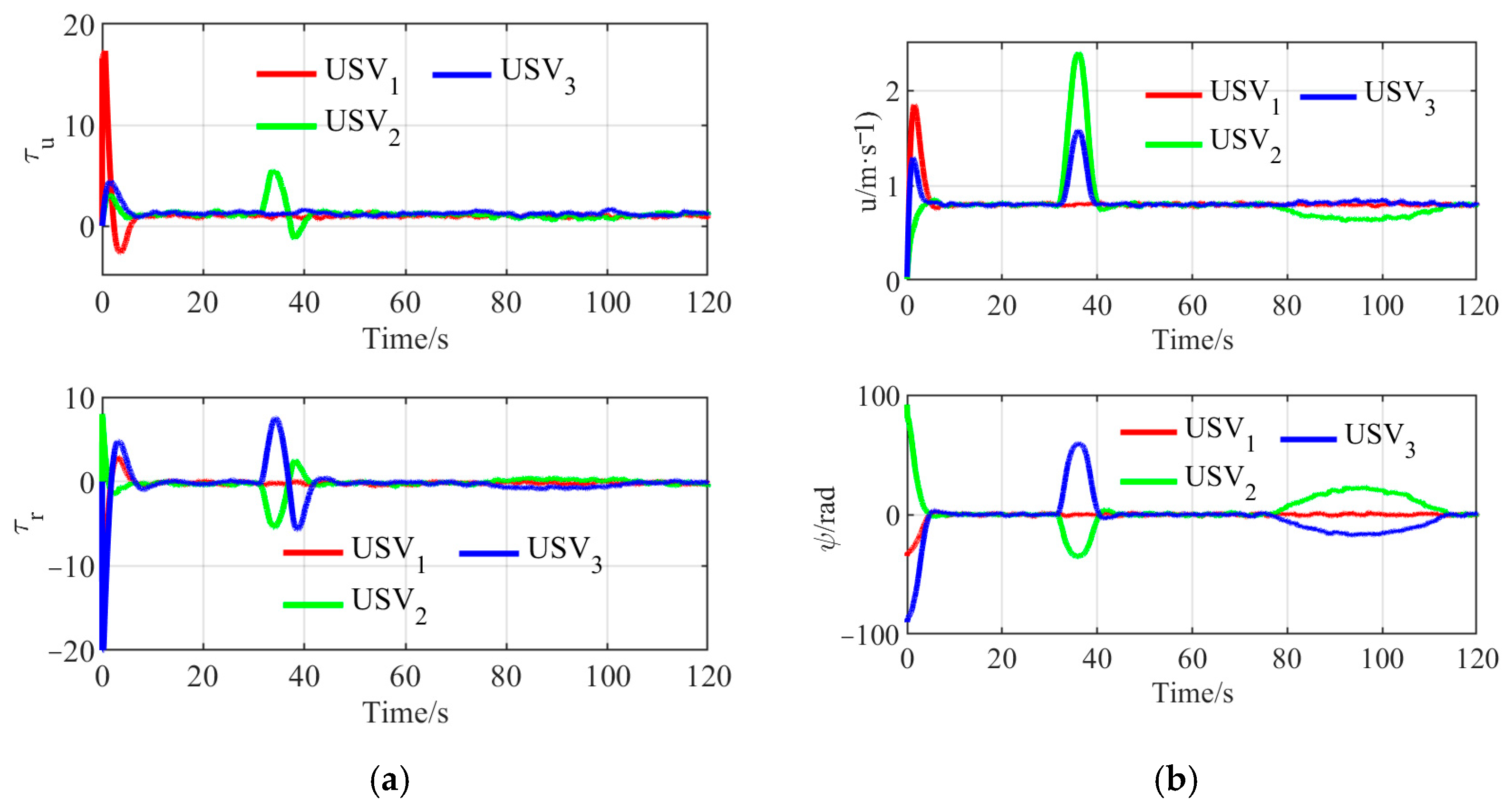
4.1. Avoiding Static and Dynamic Obstacles
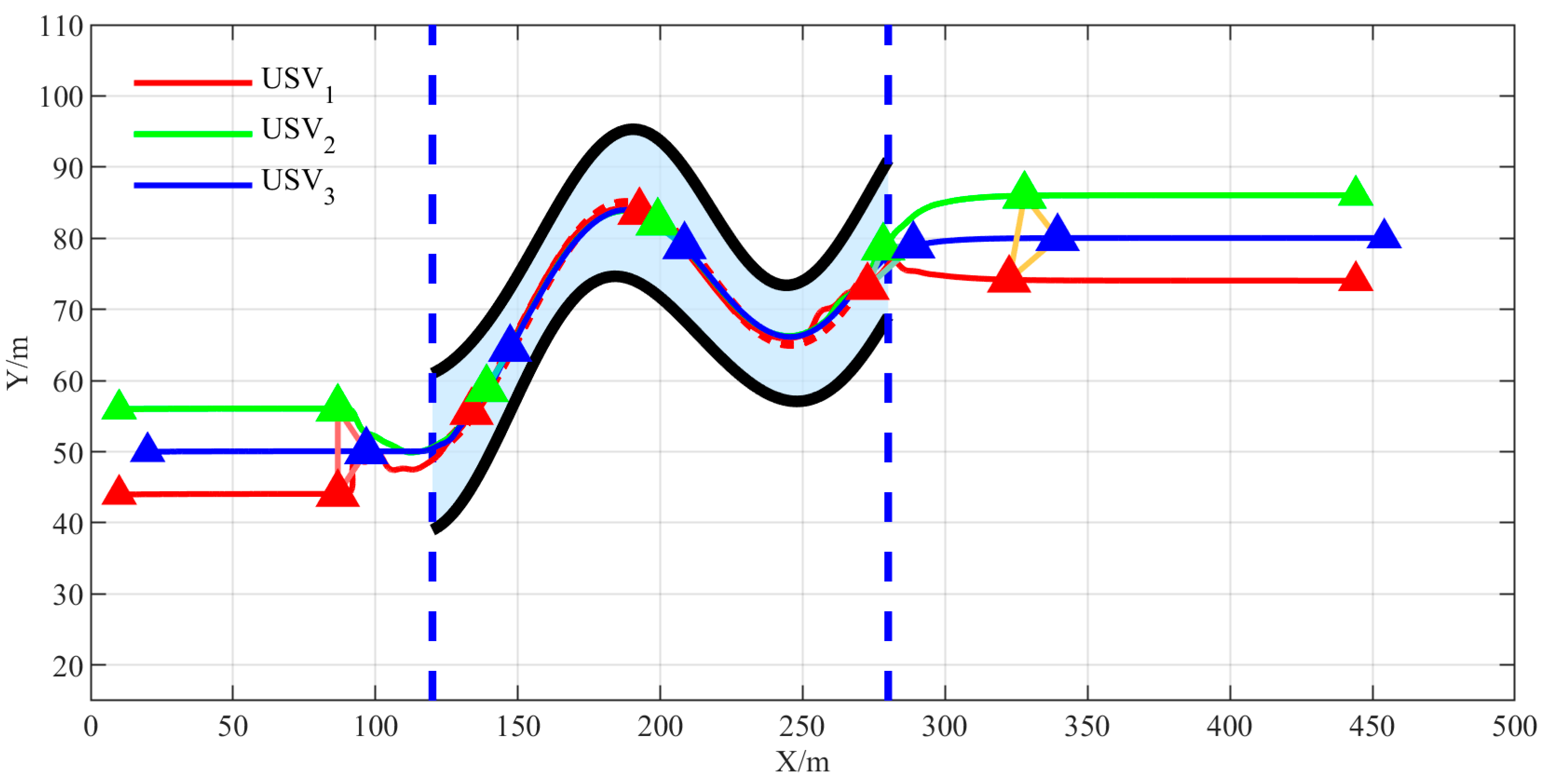
4.2. Navigating Through Narrow Waterways
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sui, B.; Zhang, J.; Liu, Z. Prescribed-time formation tracking control for underactuated USVs with prescribed performance. J. Mar. Sci. Eng. 2025, 13, 480. [Google Scholar] [CrossRef]
- Luo, Q.; Wang, H.; Li, N.; Zheng, W. Multi-unmanned surface vehicle model-free sliding mode predictive adaptive formation control and obstacle avoidance in complex marine environment via model-free extended state observer. Ocean Eng. 2024, 293, 116773. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, Q.; Xu, L.; Xu, S.; Zhang, Y.; Hu, Y. Dynamic sliding mode formation control of unmanned surface vehicles under actuator failure. J. Mar. Sci. Eng. 2025, 13, 657. [Google Scholar] [CrossRef]
- Yan, X.; Jiang, D.; Miao, R.; Li, Y. Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field. J. Mar. Sci. Eng. 2021, 9, 161. [Google Scholar] [CrossRef]
- Liu, G.; Wen, N.; Long, F.; Zhang, R. A formation control and obstacle avoidance method for multiple unmanned surface vehicles. J. Mar. Sci. Eng. 2023, 11, 2346. [Google Scholar] [CrossRef]
- Chang, Z.; Zong, G.; Wang, W.; Yue, M.; Zhao, X. Formation control and obstacle avoidance design for networked USV swarm with exogenous disturbance under intermittent communication. IEEE Trans. Netw. Sci. Eng. 2025, 12, 3234–3243. [Google Scholar] [CrossRef]
- Lin, Y.; Du, L.; Yuen, K.F. Multiple unmanned surface vehicles pathfinding in dynamic environment. Appl. Soft Comput. 2025, 172, 112820. [Google Scholar] [CrossRef]
- Luan, T.; Tan, Z.; You, B.; Sun, M.; Yao, H. Path planning of unmanned surface vehicle based on artificial potential field approach considering virtual target points. Trans. Inst. Meas. Control 2024, 46, 1190–1202. [Google Scholar] [CrossRef]
- Li, W.; Zhang, X.; Wang, Y.; Xie, S. Comparison of linear and nonlinear model predictive control in path following of underactuated unmanned surface vehicles. J. Mar. Sci. Eng. 2024, 12, 575. [Google Scholar] [CrossRef]
- Zheng, H.; Li, J.; Tian, Z.; Liu, C.; Wu, W. Hybrid physics-learning model based predictive control for trajectory tracking of unmanned surface vehicles. IEEE Trans. Intell. Transp. Syst. 2024, 25, 11522–11533. [Google Scholar] [CrossRef]
- Jiang, L.; Wang, C.; Shang, X.; Zhang, Z. Two-step event-triggered data driven model predictive control for trajectory tracking of unmanned surface vessel under environmental disturbances. IEEE Trans. Autom. Sci. Eng. 2025, 22, 16801–16813. [Google Scholar] [CrossRef]
- Morari, M.; Lee, J.H. Model predictive control: Past, present and future. Comput. Chem. Eng. 1999, 23, 667–682. [Google Scholar] [CrossRef]
- Abdelaal, M.; Hahn, A. Predictive path following and collision avoidance of autonomous vessels in narrow channels. IFAC-PapersOnLine 2021, 54, 245–251. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Peng, H.; Qie, X.; Zhao, X.; Lu, C. A simultaneous planning and control method integrating APF and MPC to solve autonomous navigation for USVs in unknown environments. J. Intell. Robot. Syst. 2022, 105, 36. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Z.; Sun, Q.; Li, Y. A formation motion control algorithm of unmanned surface vehicles based on DMPC and improved APF under unidirectional topologies. Unmanned Syst. Technol. 2022, 5, 1–11. [Google Scholar]
- He, Z.; Chu, X.; Liu, C.; Wu, W. A novel model predictive artificial potential field based ship motion planning method considering COLREGs for complex encounter scenarios. ISA Trans. 2023, 134, 58–73. [Google Scholar] [CrossRef]
- Li, H.; Wang, X.; Wu, T.; Ni, S. A COLREGs-Compliant ship collision avoidance decision-making support scheme based on improved APF and NMPC. J. Mar. Sci. Eng. 2023, 11, 1408. [Google Scholar] [CrossRef]
- Ning, B.; Sun, Q.; Wang, S.; Fan, Y. Multi-unmanned surface vehicles formation based on DMPC and improved APF Method. In Proceedings of the 2023 IEEE 23rd International Conference on Communication Technology (ICCT), Wuxi, China, 20–22 October 2023; IEEE: New York, NY, USA, 2023; pp. 117–122. [Google Scholar]
- Han, S.; Sun, J.; Ding, S.; Zhou, L. A potential field-based model predictive target following controller for underactuated unmanned surface vehicles. IEEE Trans. Veh. Technol. 2024, 73, 14510–14524. [Google Scholar] [CrossRef]
- Menges, D.; Tengesdal, T.; Rasheed, A. Nonlinear model predictive control for enhanced navigation of autonomous surface vessels. IFAC-PapersOnLine 2024, 58, 296–302. [Google Scholar] [CrossRef]
- Li, H.; Wang, X.; Soares, C.G.; Ni, S. A collision-avoidance decision-making scheme based on artificial potential fields and event-triggered control. Ocean Eng. 2024, 306, 118101. [Google Scholar] [CrossRef]
- Li, W.; Wu, J.; Long, C. Formation control for unmanned surface vehicles based on integrative APF and MPC. In Proceedings of the 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO), Xishuangbanna, China, 5–9 December 2022 2022; IEEE: New York, NY, USA, 2022; pp. 201–206. [Google Scholar]
- Wang, L.; Pang, W.; Zhu, D. Event-triggered model predictive control algorithm for multi-AUV formation. Ordnance Ind. Autom. 2023, 42, 67–77. [Google Scholar]
- Xue, Y.; Clelland, D.; Lee, B.; Han, D. Automatic simulation of ship navigation. Ocean. Eng. 2011, 38, 2290–2305. [Google Scholar] [CrossRef]
- Wang, Z.; Im, N. Enhanced Artificial Potential Field for MASS’s Path Planning Navigation in Restricted Waterways. Appl. Ocean Res. 2024, 149, 104052. [Google Scholar] [CrossRef]
- Do, K.D. Synchronization motion tracking control of multiple underactuated ships with collision avoidance. IEEE Trans. Ind. Electron. 2016, 63, 2976–2989. [Google Scholar] [CrossRef]
- Zhen, Q.; Wan, L.; Li, Y.; Jiang, D. Formation control of a multi-AUVs system based on virtual structure and artificial potential field on SE(3). Ocean Eng. 2022, 253, 111148. [Google Scholar] [CrossRef]
- Han, J. Extended state observer for a class of uncertain systems. Control Decis. 1995, 1, 85–88. [Google Scholar]
- Gu, N.; Peng, Z.; Wang, D.; Shi, Y.; Wang, T. Antidisturbance coordinated path following control of robotic autonomous surface vehicles: Theory and experiment. IEEE/ASME Trans. Mechatron. 2019, 24, 2386–2396. [Google Scholar]
- Liu, C.; Wang, D.; Zhang, Y.; Meng, X. Model predictive control for path following and roll stabilization of marine vessels based on neurodynamic optimization. Ocean Eng. 2020, 217, 107524. [Google Scholar] [CrossRef]
- Kong, S.; Sun, J.; Qiu, C.; Wu, Z.; Yu, J. Extended state observer-based controller with model predictive governor for 3-D trajectory tracking of underactuated underwater vehicles. IEEE Trans. Ind. Inform. 2020, 17, 6114–6124. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Xue, Q.; Pan, M.; Liu, Z.; Li, H. Hybrid Obstacle Avoidance Algorithm Based on IAPF and MPC for Underactuated Multi-USV Formation. J. Mar. Sci. Eng. 2025, 13, 1436. https://doi.org/10.3390/jmse13081436
Sun H, Xue Q, Pan M, Liu Z, Li H. Hybrid Obstacle Avoidance Algorithm Based on IAPF and MPC for Underactuated Multi-USV Formation. Journal of Marine Science and Engineering. 2025; 13(8):1436. https://doi.org/10.3390/jmse13081436
Chicago/Turabian StyleSun, Hui, Qing Xue, Mingyang Pan, Zongying Liu, and Hangqi Li. 2025. "Hybrid Obstacle Avoidance Algorithm Based on IAPF and MPC for Underactuated Multi-USV Formation" Journal of Marine Science and Engineering 13, no. 8: 1436. https://doi.org/10.3390/jmse13081436
APA StyleSun, H., Xue, Q., Pan, M., Liu, Z., & Li, H. (2025). Hybrid Obstacle Avoidance Algorithm Based on IAPF and MPC for Underactuated Multi-USV Formation. Journal of Marine Science and Engineering, 13(8), 1436. https://doi.org/10.3390/jmse13081436