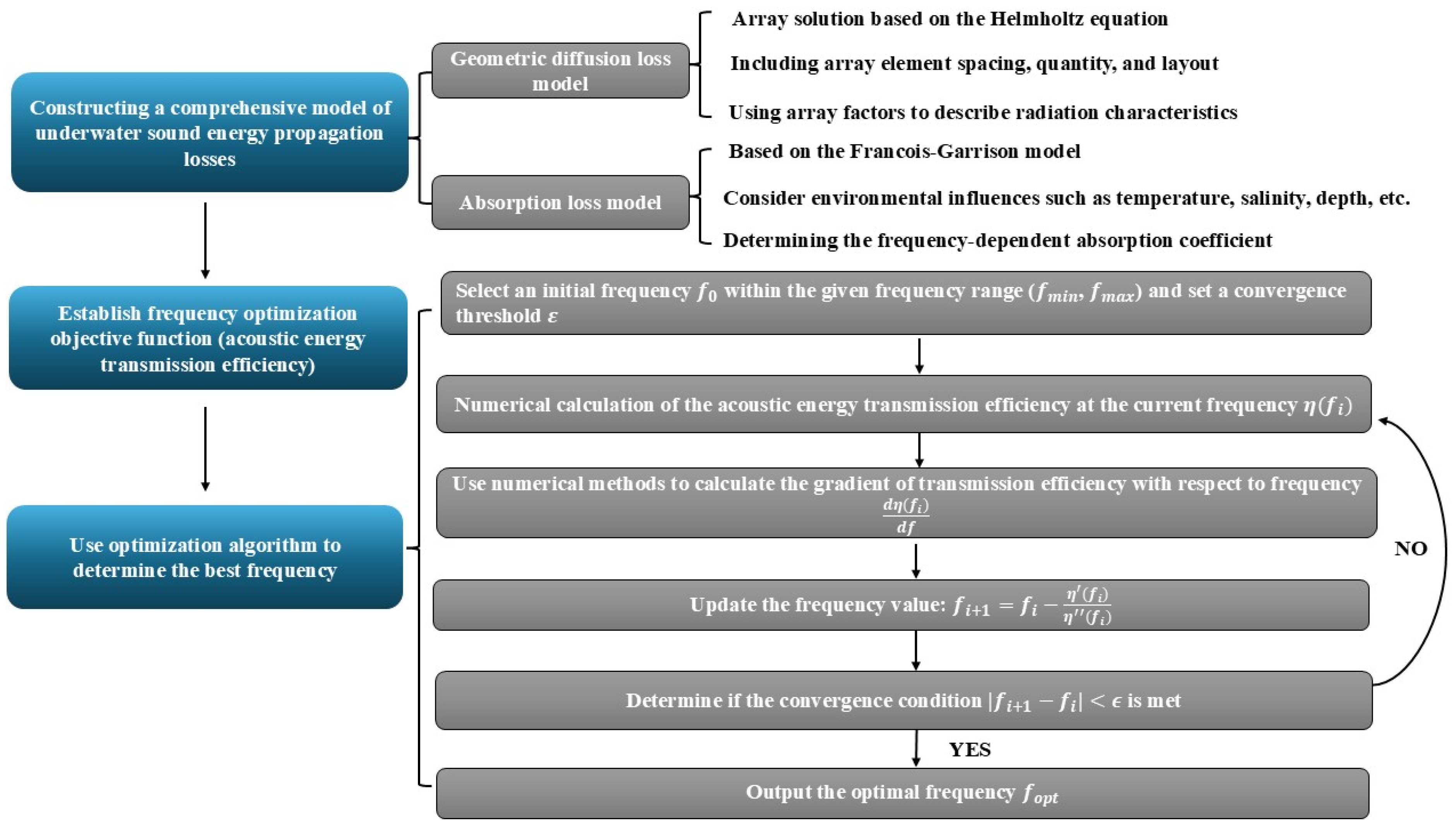
In the practical application of underwater acoustic systems, it is often necessary to complete the layout design of the acoustic source array according to the design requirements of the real underwater environment application scenario. Therefore, this paper investigates the frequency optimization compensation method for determining the underwater acoustic energy transmission loss under multiple constraints of array layout parameters and underwater environment parameters.
3.1.1. Experimental Parameter Setting
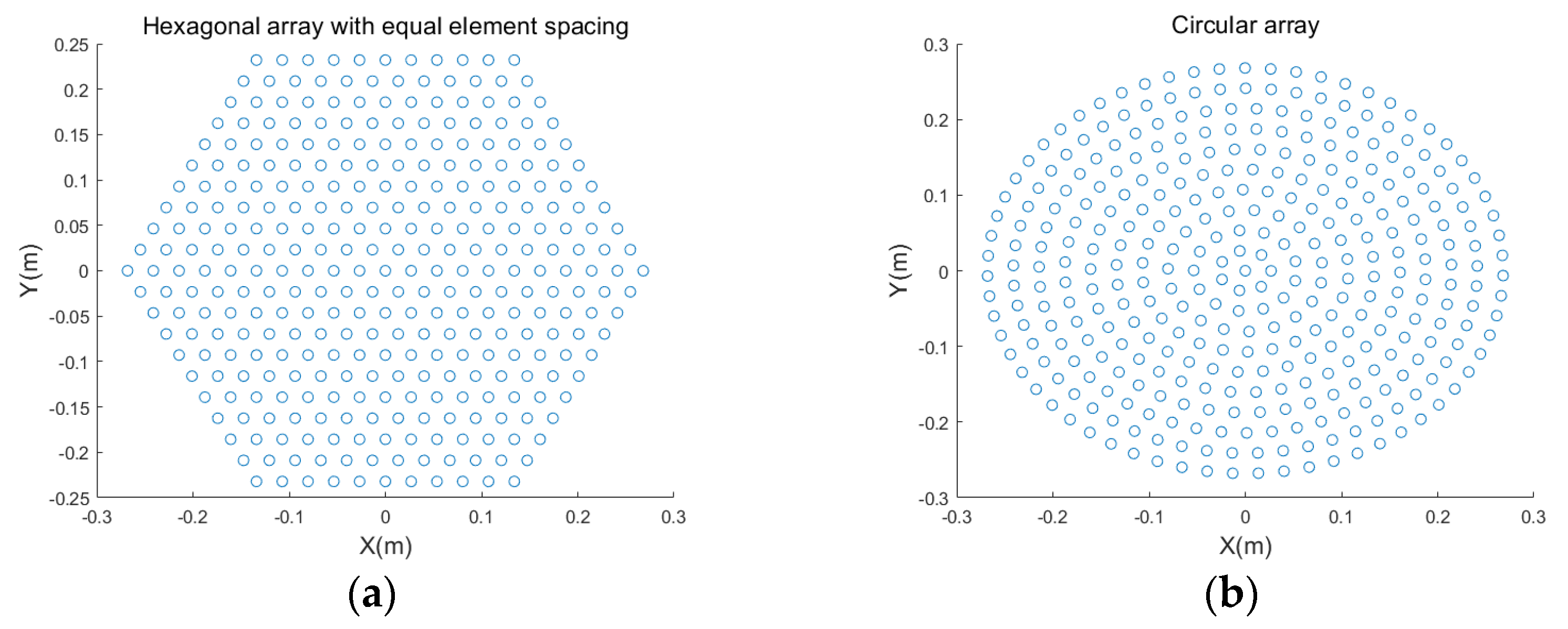
Array geometry parameters: In this study, array geometry parameters were systematically established for different acoustic array configurations. The overall physical dimension of the transmitting array was initially fixed by design constraints associated with the intended application scenario. However, the spacing between individual array elements was defined as half of the acoustic wavelength corresponding to the chosen operating frequency. This half-wavelength element spacing was deliberately selected to minimize the occurrence of grating lobes, maximize the coherent constructive interference, and effectively suppress unwanted diffraction effects. Consequently, although the physical boundary of the array was fixed, the actual number of array elements and layers varied dynamically with the operating frequency due to the inverse proportionality between the wavelength and frequency. Specifically, higher operating frequencies result in smaller wavelengths, allowing a larger number of elements to be integrated within the fixed array dimensions and thereby enhancing the array’s directional performance.
The linear array lengths were set to 0.75 m and 0.5 m, reflecting typical dimensions of underwater acoustic transmitting arrays. The 0.75 m length was chosen to represent a relatively large yet practical aperture for underwater applications—roughly the maximum size that can be mounted on an underwater vehicle or a moored system without becoming unwieldy. The 0.5 m length, by contrast, represents a compact array design. This dimension is common in portable or space-constrained underwater equipment and allows us to examine the performance trade-offs associated with a reduced aperture. Using a 0.5 m array therefore allows us to model scenarios in which physical space is limited, a situation frequently encountered by small autonomous underwater vehicles or seabed instruments in practice.
Operating frequency range: Moreover, different frequency ranges were deliberately selected for various array configurations (linear, equidistant hexagonal, and circular arrays) to evaluate their performance under distinct operational conditions—low-frequency scenarios emphasize deeper penetration despite higher absorption losses, whereas high-frequency scenarios offer increased spatial resolution at the cost of a reduced penetration capability. To effectively quantify the impact of the frequency on the acoustic transmission performance, frequency sweeps were conducted with frequency resolutions that differed by 1 kHz increments, spanning the entire experimental frequency range listed in
Table 1. This chosen resolution ensures sufficient granularity for accurately capturing variations in acoustic propagation efficiency and adequately supports subsequent optimization analysis.
For the line array, we extended the frequency sweep to 300 kHz. This higher ceiling allowed us to investigate the high-frequency region where the array’s directivity could markedly enhance the efficiency—and to assess the point at which the absorption losses negate those gains. Even at 300 kHz, the computational burden for the line array was still manageable, so we kept the entire sweep range to capture any potential ultra-high-frequency efficiency peaks.
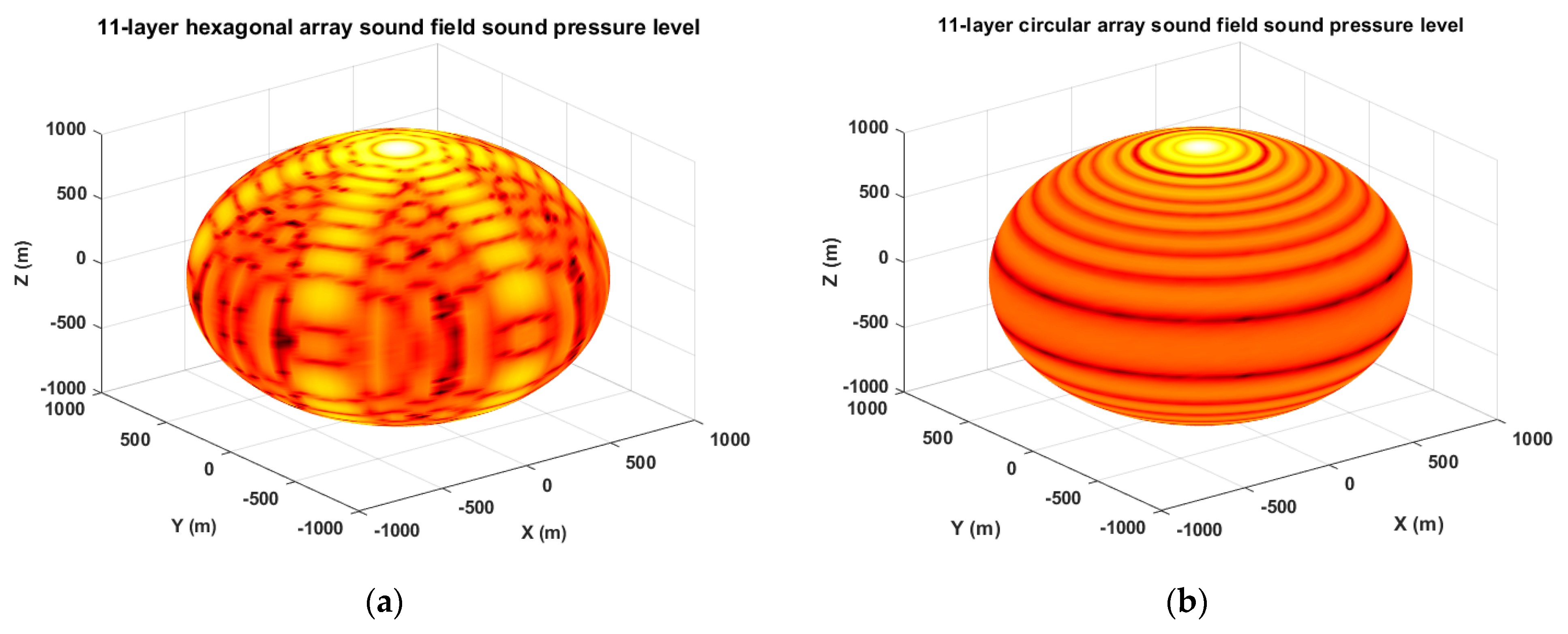
For the planar arrays (hexagonal and circular), the sweep was capped at 200 kHz. Beyond roughly 200 kHz, the absorption in water becomes so severe that the long-range transmission efficiency approaches zero, and modeling two-dimensional arrays in this band would demand an extremely fine spatial mesh with a prohibitive computational cost. In practice, most underwater acoustic power systems also operate below 200 kHz, so this upper limit is well-justified on both physical and computational grounds.
These frequency-domain simulations effectively treat the source excitation as a steady-state continuous wave at each discrete frequency. Our study focuses on identifying the dynamic equilibrium frequency that maximizes the transmission efficiency of underwater acoustic energy by balancing geometric spreading and absorption losses. To achieve this, we employed continuous sinusoidal signals (frequency sweeps) rather than impulse excitation, for the following reasons:
Frequency-dependent optimization: Continuous excitation allows us to conduct systematic frequency sweeps (1 kHz resolution) to evaluate the transmission efficiency across a broad spectrum. This approach directly aligns with our goal of identifying optimal frequency ranges where the absorption and geometric diffusion losses dynamically balance.
Steady-state energy metrics: impulse excitation primarily captures transient time-domain responses, which are less relevant for quantifying the efficiency of steady-state energy transmission—a core focus of this work.
Model compatibility: the derived theoretical framework relies on frequency-domain Helmholtz solutions and absorption models (Francois–Garrison), which inherently assume harmonic steady-state conditions.
Medium properties: For the simulation, we set the temperature, salinity, pH, and pressure to reflect a typical marine environment, which determined the speed of sound and its effect on the absorption properties of sound waves.
Table 2 shows the acoustic environmental parameters of the medium, water, as extracted from different real marine environments.
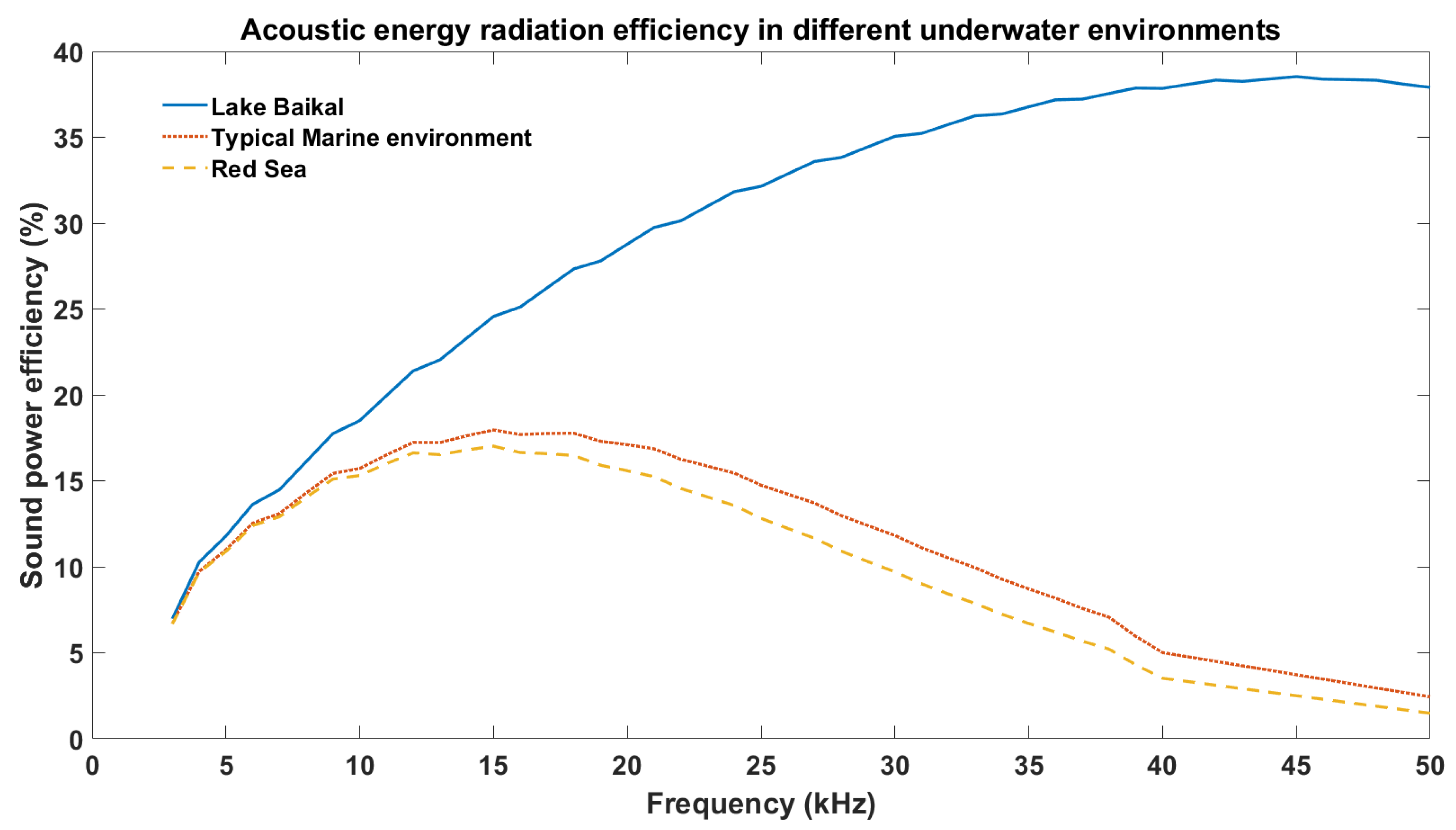
The selected temperatures (0 °C, 20 °C, and 30 °C) used in this study are not arbitrary and deliberately align with three distinct real-world underwater environments that span the spectrum of acoustic absorption characteristics. These temperatures were chosen to rigorously analyze the dynamic balance between absorption and geometric spreading losses under extremes (minimum and maximum absorption attenuation) and typical marine conditions, ensuring the model’s applicability across diverse scenarios:
This temperature represents low-temperature, freshwater environments with minimal absorption attenuation.
Lake Baikal, the world’s deepest freshwater lake, exhibits near-freezing bottom temperatures (~0–4 °C) and negligible salinity (0 PSU).
Such environments yield the lowest absorption coefficients (α) due to the absence of salinity-driven chemical relaxation (e.g., magnesium sulfate contributions) and the reduced viscous losses that occur in cold water.
- 2.
20 °C (typical marine environment):
This temperature reflects temperate ocean conditions with moderate absorption attenuation.
This temperature is representative of the average surface waters in open oceans (e.g., North Atlantic, Pacific), where the salinity (35 PSU) and temperature jointly govern α through boric acid and magnesium sulfate relaxation mechanisms.
- 3.
30 °C (Red Sea environment):
This temperature represents high-temperature, hypersaline environments with maximum absorption attenuation.
The Red Sea, characterized by surface temperatures exceeding 30 °C and salinity up to 41 PSU, exhibits peak absorption coefficients due to intensified magnesium sulfate (MgSO4) relaxation and thermal-enhanced viscous losses.
Boundary conditions: in order to simulate the propagation of sound in open water, boundary conditions are set to avoid the interference of boundary reflections on the simulation results.
Propagation distance and receiving direction: the simulation evaluates the acoustic energy attenuation characteristics at different propagation distances and receiving angles to verify the energy loss mechanism.
3.1.2. Numerical Simulation Design
Numerical modeling of energy loss: numerical computing platform tools are used to numerically model the energy loss, including key variables such as the sound pressure level (SPL), attenuation coefficient, and frequency-dependent absorption loss, in order to quantitatively analyze the impact of acoustic energy loss.
In order to verify the accuracy of the derived theoretical values of the array sound source and to further investigate the equilibrium relationship between geometric diffusion attenuation and absorption attenuation, this study was based on the finite element simulation method and used the MATLAB (Version 9.8 R2020a) numerical computation tool to realize accurate numerical simulation of the radiation characteristics of the sound source in the simulation environment. The core intent of the numerical simulation was to analyze the acoustic transmission efficiency of the simulated array by constructing a specified spherical acoustic domain surrounding the sound source to quantify the contributions of geometric diffusion attenuation and absorption attenuation, and to ultimately to determine the optimal frequency of acoustic energy.
Accurately measuring the three-dimensional distribution of underwater acoustic power requires that a large number of hydrophones be deployed across the entire study domain—or over a closed surface that encloses the sound source. Each hydrophone must record the local sound-pressure amplitude and phase to reconstruct the complete acoustic field. However, in physical experiments, hydrophones cannot be packed densely enough to cover the entire spherical surface without gaps. Physical constraints on sensor size and spacing mean that real arrays will inevitably under-sample certain regions. Moreover, even a dense hydrophone array introduces measurement uncertainties such as calibration errors and electronic noise—and achieving perfect synchronization for phase acquisition is challenging.
Given these limitations, we chose high-fidelity finite-element simulation in place of physical experiments. The simulation conducted herein serves as an ideal experimental setup with extremely high “sensing” density: the entire spherical domain is discretized into small volumetric elements whose dimensions are on the order of the acoustic wavelength. The model computes the pressure field at every point within this three-dimensional grid, offering continuous, high-resolution acoustic field analysis. Because the dense mesh can approximate the sphere with arbitrary precision and provides many more sampling nodes than practical instrumentation, it delivers much higher spatial resolution and, consequently, greater computational accuracy. In other words, the method is immune to sensor noise, coverage gaps, and other instrument-related issues, and can dynamically adjust the spatial resolution according to the frequency of the wavelength, ensuring that no details are lost through under-sampling.
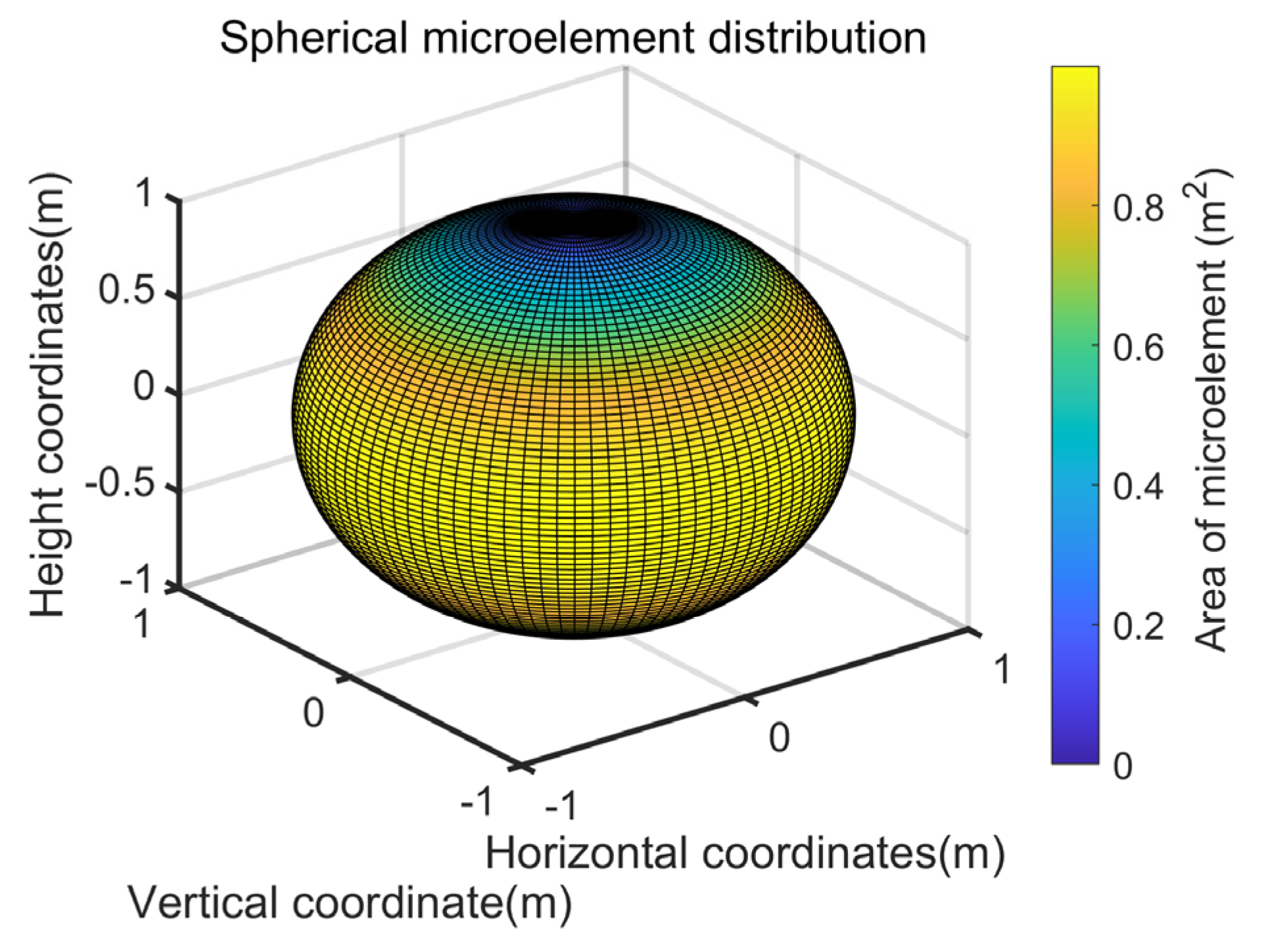
Figure 2 illustrates the discretization strategy that we employed to numerically simulate spherical acoustic domains. This study utilizes the finite element discretization method, subdividing the spherical surface into mesh elements with well-defined element types, sizes, and quantities. To balance simulation accuracy and computational efficiency, based on acoustic wave propagation theory and the Courant–Friedrichs–Lewy stability criterion, this study sets the maximum element edge length to 1/10 of the wavelength corresponding to the highest working frequency, thereby ensuring the accurate capture of acoustic field variations across the entire frequency range during frequency sweeps [
47]. Tetrahedral elements are selected to ensure sufficiently fine discretization at the spherical boundary and in regions with large sound pressure gradients. As shown in the figure, the discrete elements exhibit relatively uniform area distribution, which effectively reduces cumulative errors caused by element non-uniformity during numerical integration. Through this meshing strategy, the spatial characteristics of the sound power distribution on the spherical surface can be accurately reflected at different frequencies while stability is ensured in calculating the sound power efficiency.
- 2.
Quantification of geometric diffusion attenuation
The geometric diffusion attenuation is quantified by calculating the sound power flow on a sound power sphere that surrounds the source. The sound pressure is sampled at discrete points on the sphere and the sound power is obtained by numerical integration over the entire sphere. The area distribution of the microelements in this process directly determines the integration accuracy, so the discretization of the microelements, as shown in
Figure 2, is the basis for the reliability of the simulation results.
- 3.
Calculation of absorption attenuation in aqueous media
The absorption attenuation is analyzed by setting the absorption coefficients of the medium according to measured parameters that are representative of real water conditions, which thereby ensures the fidelity of the simulation results. Specifically, the environmental parameters within the entire acoustic domain—comprising both the sound source and the measurement points—are defined to represent realistic underwater scenarios. By establishing distinct absorption scenarios through variation of these parameters, the effects of absorption attenuation on acoustic power transmission are rigorously assessed and combined with geometric diffusion attenuation. This integrated approach enables a comprehensive and precise quantitative analysis of the acoustic energy loss.
- 4.
Determination of optimal frequency
The acoustic transmission efficiency at various frequencies is investigated by systematically varying the radiation frequency of the sound source. These simulations focus explicitly on identifying the optimal frequency at which the geometric diffusion attenuation and absorption attenuation achieve equilibrium, which signifies the frequency condition that maximizes the acoustic energy transmission efficiency. The determined optimal frequency provides crucial theoretical guidance for practical acoustic source design.
The acoustic power efficiency value is derived from the sound pressure recorded at the receiver, that is, on the spherical observation surface surrounding the sound source. In other words, our simulation measures the sound pressure field at the receiver and converts it to sound intensity and total acoustic power, which are then used to calculate the transmission efficiency. This pressure → intensity → power → efficiency derivation process inherently accounts for the influence of the received pressure in performance evaluation. This approach is sufficient for assessing energy transmission performance because it condenses the impact of the received pressure into a practical efficiency metric that is relevant to energy transfer evaluation.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}