
Towards Hazard Analysis Result Verification for Autonomous Ships: A Formal Verification Method Based on Timed Automata

 , ,
, , 
Abstract
1. Introduction
- To propose a three-phase methodological framework to verify hazard analysis results and support risk assessment for autonomous ships.
- To provide a verification technology that satisfies the characteristics of high time sensitivity by introducing model checking based on time automata.
- To model formalism based on the UPPAAL model checker that can automatically verify the results of hazard analysis.
- The implementation of this study achieves the closed-loop hazard analysis of STPA in the risk-based assessment framework. Results disclose the significance of the collaborative work between safety and system engineering in the development of autonomous systems under the definition of human–computer interaction mode transformation.
2. Literature Review
3. Methodology
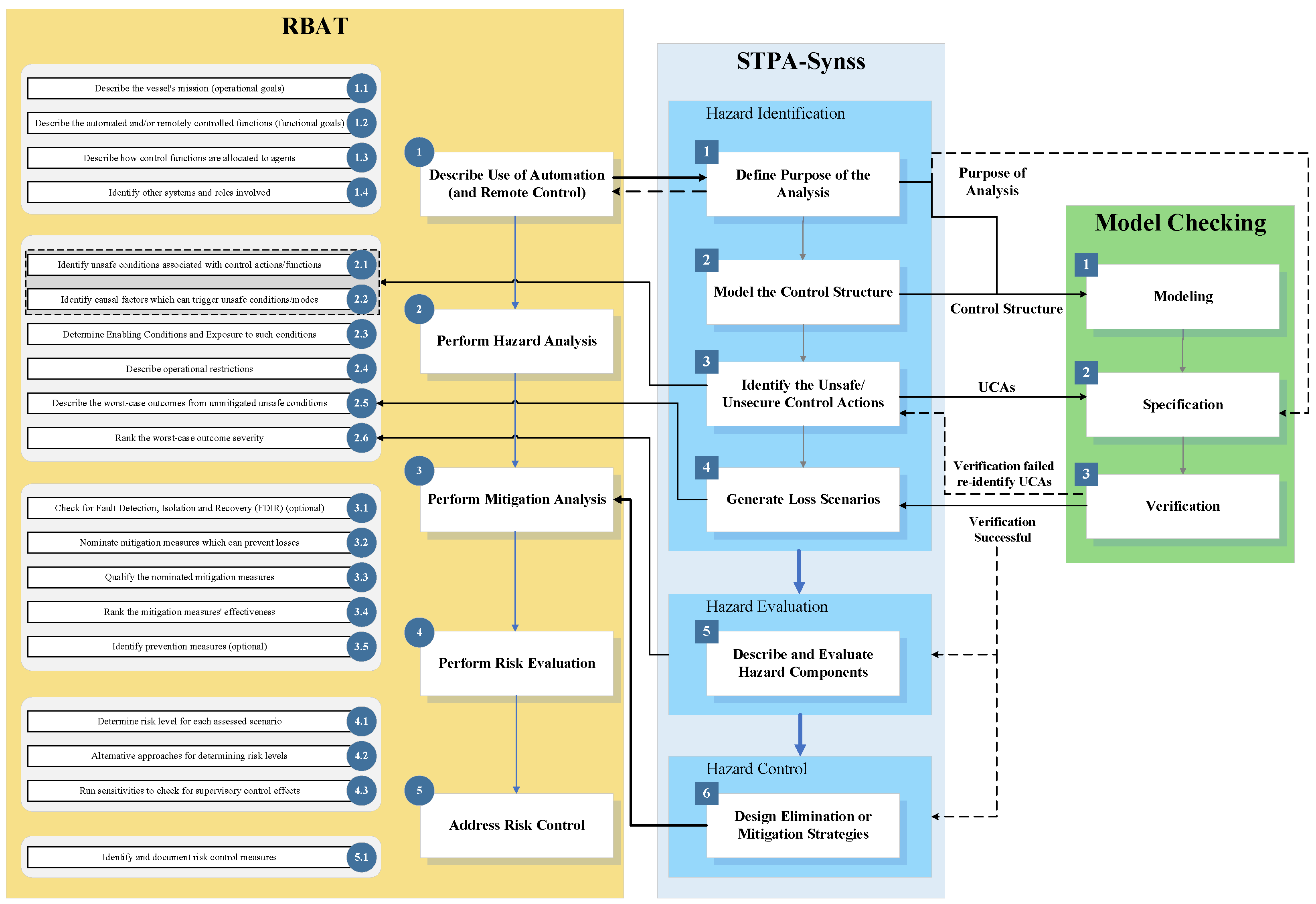
3.1. STPA-Based Analysis Method That Synthesizes Safety and Security (STPA-SynSS)
3.2. Model Checking Based on Timed Automata
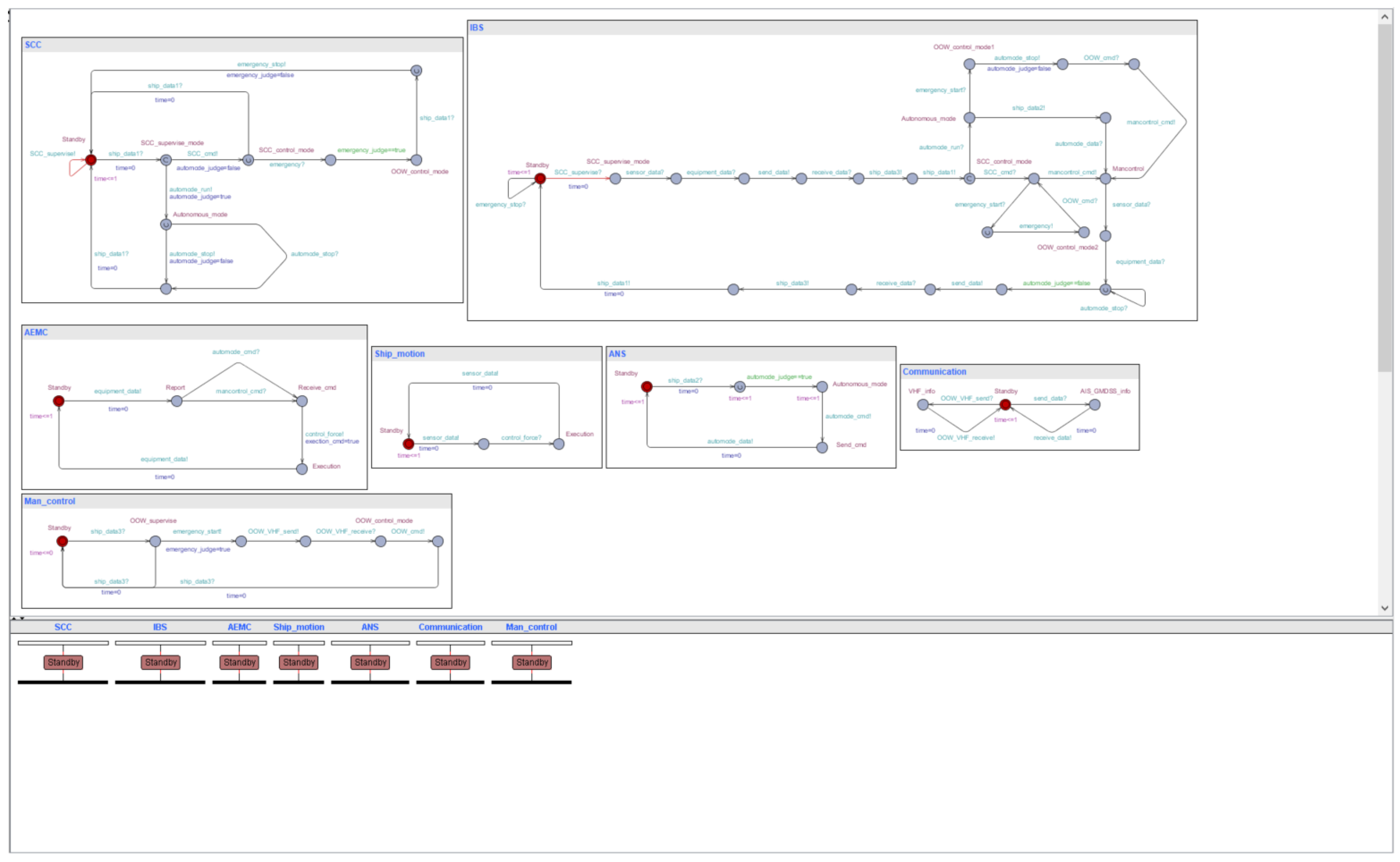
- Modeling: Initially, a formalized description method is chosen to transform the actual system to be verified into a format compatible with model-checking tools. Typically, finite state models, such as transition systems, finite automata, and Petri Nets, are used for modeling the system, resulting in system model M. During the modeling process, due to limitations in verification time and computer memory, abstraction techniques are necessary to simplify irrelevant or unimportant details to avoid state explosion.
- Specification: Prior to verification, the properties that the system must possess need to be described, usually expressed through temporal logic formulas, leading to property specifications φ, such as system safety and system liveness.
- Verification: A model-checking algorithm (tool) is developed that uses an exhaustive search of the state space for the formal verification of systems. Inputs for the algorithm consist of the model M of the system to be verified and the property specification φ to be checked. Upon the completion of verification, if no states are found that violate the property specification, this signifies that system model M complies with property specification φ. If system model M does not meet property specification φ, the model checking algorithm outputs a counterexample path demonstrating the system behavior that fails to meet the specification, thus clarifying why M fails to satisfy φ.
- is a finite set of locations.
- is the initial location.
- is a finite set of labels.
- is a finite set of clocks, with values being non-negative real numbers . For all clocks in , the rate of time passage is the same.
- is a mapping from locations to clock constraints, specifying a clock constraint from for each location in as the invariant of location , known as the location invariant. is a set of clock constraints defined on , with each clock constraint being constructed using the BNF syntax as , where means satisfying or , and denotes a non-negative real number.
- is a set of transitions, where the quintuple represents a transition from location to location labeled , which must satisfy the clock constraint ; represents the set of all clocks that are reset when the transition occurs, and .
3.3. The Proposed Method to Automatically Verify the Results of Hazard Analysis
4. Illustrative Case Study
4.1. Results from Phase 1 (Modeling)
4.2. Results from Phase 2 (Specification)
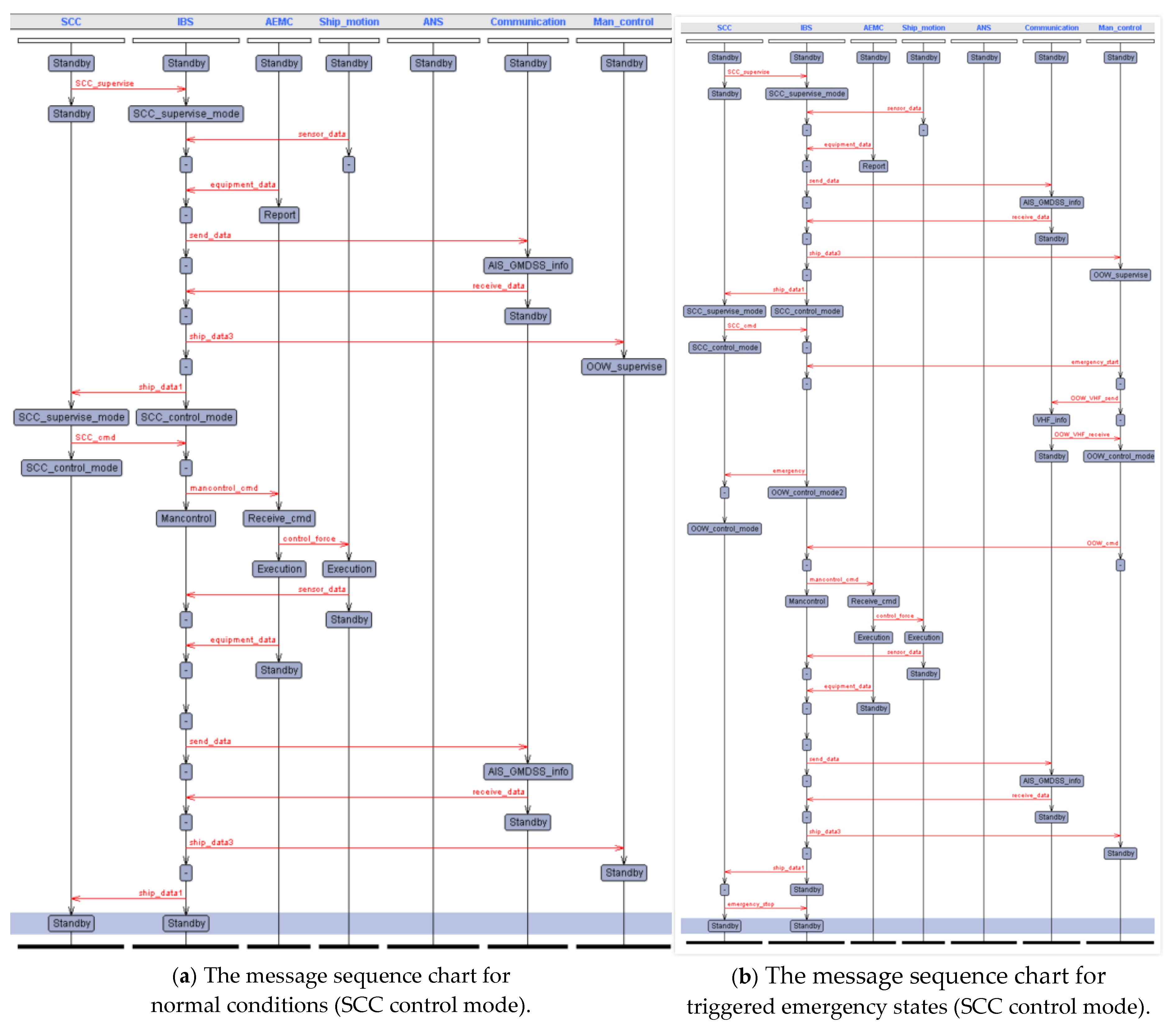
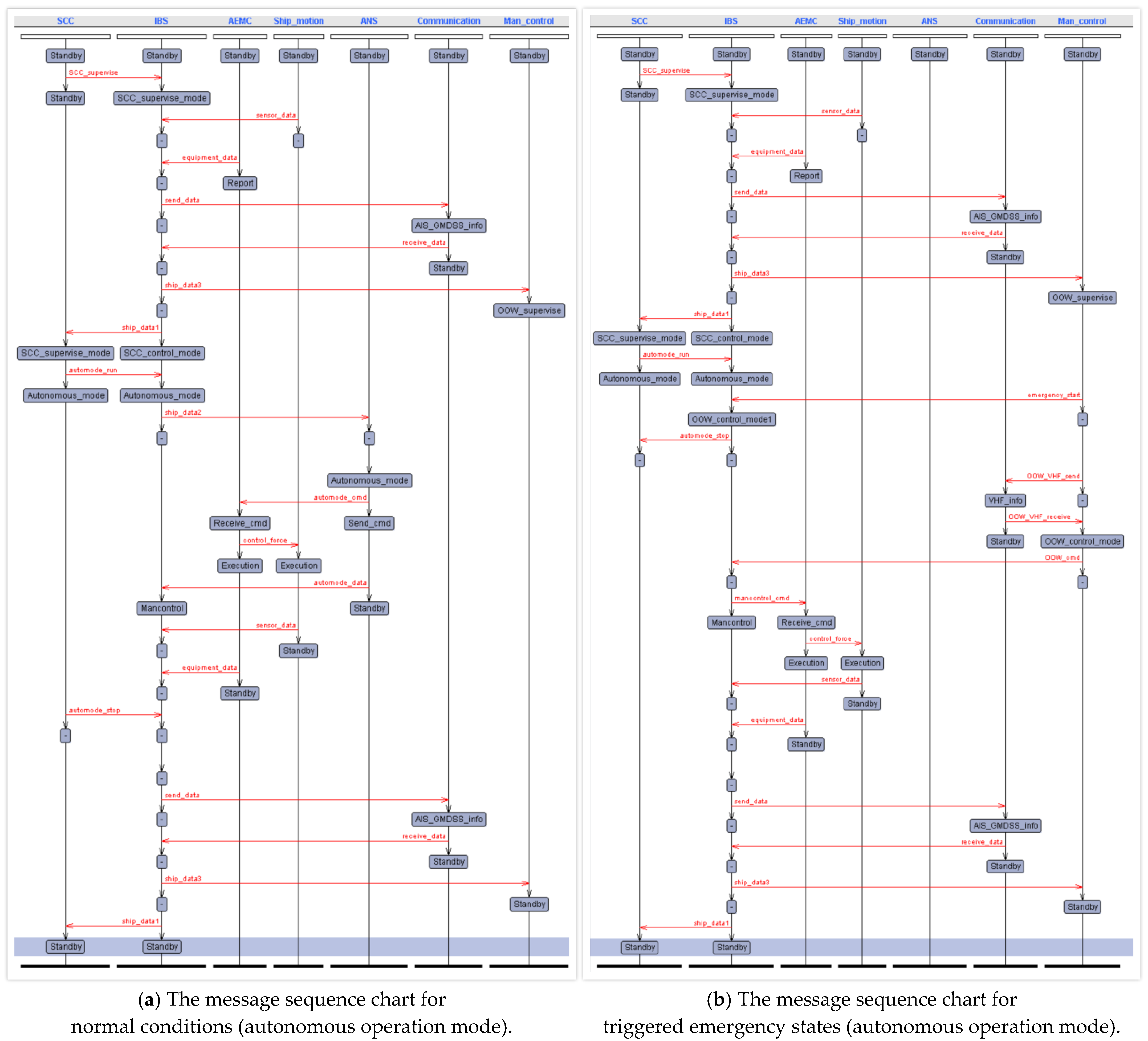
4.3. Results from Phase 3 (Verification)
5. Discussion
5.1. Collaboration Between Model Checking and STPA
5.2. Key Findings from the Case Study
5.3. Potential for Industry Adoption
5.4. Limitations and Prospects
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
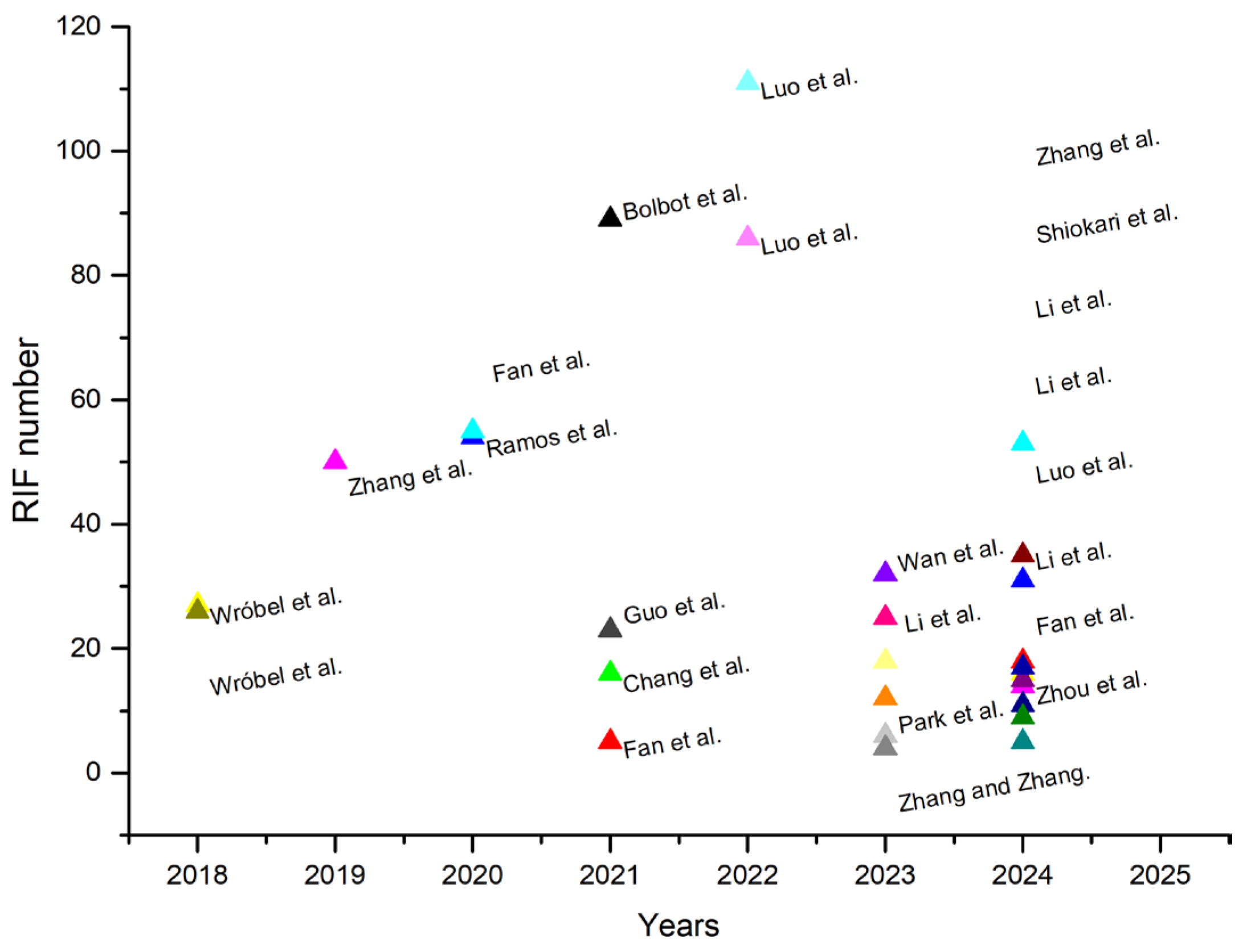
| No. | Year | Number of RIF | References |
|---|---|---|---|
| 1 | 2024 | 14 | Zhou, Y., Liu, Z., Wang, X., Xie, H., Tao, J., Wang, J. and Yang, Z. Human errors analysis for remotely controlled ships during collision avoidance. Front. Mar. Sci. 2024, 11, 1473367. |
| 2 | 2024 | 18 | Li, C., Zhao, J., Ding, G., Zhang, K., Li, W., Li, Y., Wang, Y. and Wen, J. The Study of Risk Assessment Method for Ship Berthing Based on the “Human-Ship-Environment” Synergy. J. Mar. Sci. Eng. 2024, 12(11), 2022. |
| 3 | 2024 | 18 | Zhang, W., Liu, Z. and Ma, X. Research on Navigation Risk Assessment of Unmanned Ship Under Complex Navigation Conditions. J. Mar. Sci. Eng. 2024, 12(11), 1947. |
| 4 | 2024 | 31 | Li, X. and Yuen, K.F. A human-centred review on maritime autonomous surfaces ships: impacts, responses, and future directions. Transport Rev. 2024, 44(4), 791-810. |
| 5 | 2024 | 53 | Zhang, W., Zhang, Y. and Zhang, C. Navigation risk assessment of intelligent ships based on DS-Fuzzy weighted distance Bayesian network. Ocean Eng. 2024, 313, 119452. |
| 6 | 2024 | 14 | Orzechowski, S.C., Verheyen, W. and Sys, C. A systematic literature review of factors influencing the regulation of autonomous inland shipping in Europe. Eur. Transport Res. Rev. 2024, 16(1), 54. |
| 7 | 2024 | 16 | Li, W., Chen, W., Guo, Y., Hu, S., Xi, Y. and Wu, J. Risk Performance Analysis on Navigation of MASS via a Hybrid Framework of STPA and HMM: Evidence from the Human–Machine Co-Driving Mode. J. Mar. Sci. Eng. 2024, 12(7), 1129. |
| 8 | 2024 | 35 | Li, P., Wang, Y. and Yang, Z. Risk assessment of maritime autonomous surface ships collisions using an FTA-FBN model. Ocean Eng. 2024, 309, 118444. |
| 9 | 2024 | 11 | Kim, J. A Fundamental Study of the Sustainable Key Competencies for Remote Operators of Maritime Autonomous Surface Ships. Sustainability-Basel 2024, 16(12), 4875. |
| 10 | 2024 | 15 | Fan, C., Montewka, J., Bolbot, V., Zhang, Y., Qiu, Y. and Hu, S. Towards an analysis framework for operational risk coupling mode: A case from MASS navigating in restricted waters. Reliab. Eng. Syst. Saf. 2024, 248, 110176. |
| 11 | 2024 | 35 | Shiokari, M., Itoh, H., Yuzui, T., Ishimura, E., Miyake, R., Kudo, J. and Kawashima, S. Structure model-based hazard identification method for autonomous ships. Reliab. Eng. Syst. Saf. 2024, 247, 110046. |
| 12 | 2024 | 9 | Sezer, S.I., Ahn, S.I., Akyuz, E., Kurt, R.E. and Gardoni, P. A hybrid human reliability analysis approach for a remotely-controlled maritime autonomous surface ship (MASS- degree 3) operation. Appl. Ocean Res. 2024, 147, 103966. |
| 13 | 2024 | 5 | Veitch, E., Alsos, O.A., Cheng, T., Senderud, K. and Utne, I.B. Human factor influences on supervisory control of remotely operated and autonomous vessels. Ocean Eng. 2024, 299, 117257. |
| 14 | 2024 | 17 | Luo, X., Ling, H., Xing, M. and Bai, X. A dynamic-static combination risk analysis framework for berthing/unberthing operations of maritime autonomous surface ships considering temporal correlation. Reliab. Eng. Syst. Saf. 2024, 245, 110015. |
| 15 | 2023 | 12 | Rødseth, Ø.J., Wennersberg, L.A.L. and Nordahl, H. Improving safety of interactions between conventional and autonomous ships. Ocean Eng. 2023, 284, 115206. |
| 16 | 2023 | 32 | Wan, C., Zhao, Y., Zhang, D. and Fan, L. A system dynamics-based approach for risk analysis of waterway transportation in a mixed traffic environment. Maritime Policy and Management 2024, 51(6), 1147-1169. |
| 17 | 2023 | 25 | Li, W., Chen, W., Hu, S., Xi, Y. and Guo, Y. Risk evolution model of marine traffic via STPA method and MC simulation: A case of MASS along coastal setting. Ocean Eng. 2023, 281, 114673. |
| 18 | 2023 | 4 | Zhang, W. and Zhang, Y. Navigation Risk Assessment of Autonomous Ships Based on Entropy–TOPSIS–Coupling Coordination Model. J. Mar. Sci. Eng. 2023, 11(2), 422. |
| 19 | 2023 | 6 | Park, C., Kontovas, C., Yang, Z. and Chang, C. A BN driven FMEA approach to assess maritime cybersecurity risks. Ocean Coast Manage 2023, 235, 106480. |
| 20 | 2023 | 4 | Zhang, W. and Zhang, Y. Research on coupling mechanism of intelligent ship navigation risk factors based on N-K model. J. Mar. Sci. Technol. 2023, 28(1), 195-207. |
| 21 | 2023 | 18 | Zhang, W. and Zhang, Y. Research on classification and navigational risk factors of intelligent ship. Brodogradnja 2023, 74(4), 105-128. |
| 22 | 2022 | 111 | Luo, X., He, H., Zhang, X., Ma, Y. and Bai, X. Failure Mode Analysis of Intelligent Ship Positioning System Considering Correlations Based on Fixed-Weight FMECA. Processes 2022, 10(12), 2677. |
| 23 | 2022 | 86 | Luo, J., Geng, X., Li, Y. and Yu, Q. Study on the Risk Model of the Intelligent Ship Navigation. Wireless Commun. Mobile Comput. 2022, 2022, 1-9. |
| 24 | 2021 | 23 | Guo, C., Haugen, S. and Utne, I.B. Risk assessment of collisions of an autonomous passenger ferry. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability 2023, 237(2), 425-435. |
| 25 | 2021 | 89 | Bolbot, V., Theotokatos, G., Wennersberg, L.A., Faivre, J., Vassalos, D., Boulougouris, E., Jan Rødseth, Ø., Andersen, P., Pauwelyn, A. and Van Coillie, A. A novel risk assessment process: Application to an autonomous inland waterways ship. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability 2023, 237(2), 436-458. |
| 26 | 2021 | 5 | Fan, C., Montewka, J. and Zhang, D. Towards a Framework of Operational-Risk Assessment for a Maritime Autonomous Surface Ship. Energies 2021, 14(13), 3879. |
| 27 | 2021 | 16 | Chang, C., Kontovas, C., Yu, Q. and Yang, Z. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. |
| 28 | 2020 | 54 | Ramos, M.A., Thieme, C.A., Utne, I.B. and Mosleh, A. A generic approach to analysing failures in human – System interaction in autonomy. Saf. Sci. 2020, 129, 104808. |
| 29 | 2020 | 55 | Fan, C., Wróbel, K., Montewka, J., Gil, M., Wan, C. and Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020, 202, 107188. |
| 30 | 2019 | 50 | Zhang, X., Zhang, Q., Yang, J., Cong, Z., Luo, J. and Chen, H. Safety Risk Analysis of Unmanned Ships in Inland Rivers Based on a Fuzzy Bayesian Network. J. Adv. Transp. 2019, 2019, 1-15. |
| 31 | 2018 | 27 | Wróbel, K., Montewka, J. and Kujala, P. Towards the development of a system-theoretic model for safety assessment of autonomous merchant vessels. Reliab. Eng. Syst. Saf. 2018, 178, 209-224. |
| 32 | 2018 | 26 | Wróbel, K., Montewka, J. and Kujala, P. System-theoretic approach to safety of remotely-controlled merchant vessel. Ocean Eng. 2018, 152, 334-345. |
Appendix B
| Model-Checking Tools | Application Area | Modeling Language | Property Description Language | Counterexample Generation | GUI | Counterexample Visualization | Operating Platform | ||
|---|---|---|---|---|---|---|---|---|---|
| Conventional | Probabilistic | Real-Time | |||||||
| CADP | √ | √ | LOTOS FC2 FSP LNT | AFMC MCL XTL | Y | Y | Y | Mac OS Linux Solaris Windows | |
| DREAM | √ | C++ Timed Automata | Monitor Automata | Y | N | N | Windows Unix-related | ||
| LTSmin | √ | √ | Promela μCRL mCRL2 DVE Input Language | μ-Calculus LTL CTL* | Y | N | N | Mac OS X Linux Windows | |
| mCRL2 | √ | √ | mCRL2 | μ-Calculus | Y | Y | Y | Mac OS Linux Solaris Windows | |
| NuSMV | √ | SMV Input Language | CTL LTL PSL | Y | N | N | Mac OS X Linux Windows | ||
| MRMC | √ | √ | Plain MC | CSL CSRL PCTL PRCTL | N | N | N | Mac OS Linux Windows | |
| PAT | √ | √ | √ | CSP# Timed CSP Probabilistic CSP | LTL Assertion | Y | Y | Y | Windows OS with Mono Support |
| PRISM | √ | PEPA PRISM Language Plain MC | CSL PLTL PCTL | N | Y | N | Mac OS Linux Windows | ||
| SPIN | √ | Promela | LTL | Y | Y | Y | Windows Unix-related | ||
| TAPAs | √ | CCSP | CTL μ-Calculus | Y | Y | Y | Mac OS Windows Unix-related | ||
| UPPAAL | √ | Timed Automata C subset | TCTL subset | Y | Y | Y | Mac OS Linux Windows | ||
| TLA+ Model Checker | √ | TLA+ PlusCal | TLA | Y | Y | N | Mac OS Linux Windows | ||
References
- Charpentier, V.; Slamnik-Kriještorac, N.; Landi, G.; Caenepeel, M.; Vasseur, O.; Marquez-Barja, J.M. Paving the way towards safer and more efficient maritime industry with 5G and Beyond edge computing systems. Comput. Netw. 2024, 250, 110499. [Google Scholar] [CrossRef]
- Chua, C.; Li, X.; Tan, K.H.; Yuen, K.F. Building sustainable performance in the maritime industry via digital resources and innovation. Transp. Policy 2024, 149, 282–299. [Google Scholar] [CrossRef]
- Sun, M.; Tong, T.; Jiang, M.; Zhu, J.X. Innovation trends and evolutionary paths of green fuel technologies in maritime field: A global patent review. Int. J. Hydrogen Energy 2024, 71, 528–540. [Google Scholar] [CrossRef]
- Wang, T.; Cheng, P.; Zhen, L. Green development of the maritime industry: Overview, perspectives, and future research opportunities. Transp. Res. Part E Logist. Transp. Rev. 2023, 179, 103322. [Google Scholar] [CrossRef]
- IMO. Development of a Goal-Based Instrument for Maritime Autonomous Ships (MASS); IMO: London, UK, 2024. [Google Scholar]
- Chaal, M.; Ren, X.; BahooToroody, A.; Basnet, S.; Bolbot, V.; Banda, O.A.V.; Gelder, P.V. Research on risk, safety, and reliability of autonomous ships: A bibliometric review. Saf. Sci. 2023, 167, 106256. [Google Scholar] [CrossRef]
- Liu, C.; Chu, X.; Wu, W.; Li, S.; He, Z.; Zheng, M.; Zhou, H.; Li, Z. Human–machine cooperation research for navigation of maritime autonomous surface ships: A review and consideration. Ocean Eng. 2022, 246, 110555. [Google Scholar] [CrossRef]
- Tao, J.; Liu, Z.; Wang, X.; Cao, Y.; Zhang, M.; Loughney, S.; Wang, J.; Yang, Z. Hazard identification and risk analysis of maritime autonomous surface ships: A systematic review and future directions. Ocean Eng. 2024, 307, 118174. [Google Scholar] [CrossRef]
- Lehmann, F.; Roop, P.S.; Ranjitkar, P. Extending Particle Hopping Models for road traffic with Timed Automata. Physical A 2020, 553, 124107. [Google Scholar] [CrossRef]
- Nazaruddin, Y.Y.; Tamba, T.A.; Pradityo, K.; Aristyo, B.; Widyotriatmo, A. Safety Verification of a Train Interlocking Timed Automaton Model. IFAC-Papersonline 2019, 52, 331–335. [Google Scholar] [CrossRef]
- EMSA. RBAT-Method Description; EMSA: Lisbon, Portugal, 2024. [Google Scholar]
- Yang, X.; Zhou, T.; Zhou, X.Y.; Zhang, W.J.; Mu, C.R.; Xu, S. A framework to identify failure scenarios in the control mode transition process for autonomous ships with dynamic autonomy. Ocean Coast Manag. 2024, 249, 107003. [Google Scholar] [CrossRef]
- Zhou, X.; Jin, S.; Ren, X.; Sun, X.; Meng, X.; Nie, S.; Zhang, W. A framework to assess the operational state of autonomous ships with multi-component degrading systems. Ocean Eng. 2025, 327, 121000. [Google Scholar] [CrossRef]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. System-theoretic approach to safety of remotely-controlled merchant vessel. Ocean Eng. 2018, 152, 334–345. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the development of a system-theoretic model for safety assessment of autonomous merchant vessels. Reliab. Eng. Syst. Saf. 2018, 178, 209–224. [Google Scholar] [CrossRef]
- Ramos, M.A.; Utne, I.B.; Mosleh, A. On factors affecting autonomous ships operators performance in a Shore Control Center. In Proceedings of the 14th Probabilistic Safety Assessment and Management, Los Angeles, CA, USA, 16–21 September 2018; pp. 16–21. [Google Scholar]
- Zhang, X.; Zhang, Q.; Yang, J.; Cong, Z.; Luo, J.; Chen, H. Safety Risk Analysis of Unmanned Ships in Inland Rivers Based on a Fuzzy Bayesian Network. J. Adv. Transp. 2019, 2019, 4057195. [Google Scholar] [CrossRef]
- Chang, C.; Kontovas, C.; Yu, Q.; Yang, Z. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. [Google Scholar] [CrossRef]
- Fan, C.; Bolbot, V.; Montewka, J.; Zhang, D. Advanced Bayesian study on inland navigational risk of remotely controlled autonomous ship. Accid. Anal. Prev. 2024, 203, 107619. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Wang, Y.; Yang, Z. Risk assessment of maritime autonomous surface ships collisions using an FTA-FBN model. Ocean Eng. 2024, 309, 118444. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, Y.; Qiao, W. Risk Scenario Evaluation for Intelligent Ships by Mapping Hierarchical Holographic Modeling into Risk Filtering, Ranking and Management. Sustainability 2022, 14, 2103. [Google Scholar] [CrossRef]
- Bolbot, V.; Theotokatos, G.; Wennersberg, L.A.; Faivre, J.; Vassalos, D.; Boulougouris, E.; Jan Rødseth, Ø.; Andersen, P.; Pauwelyn, A.; Van Coillie, A. A novel risk assessment process: Application to an autonomous inland waterways ship. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2023, 237, 436–458. [Google Scholar] [CrossRef]
- Wang, R.; Zheng, W.; Liang, C.; Tang, T. An integrated hazard identification method based on the hierarchical Colored Petri Net. Saf. Sci. 2016, 88, 166–179. [Google Scholar] [CrossRef]
- Xu, Q.; Lin, J. Safety Analysis of Communication-Based Train Control System by STPA and Colored Petri Net. In Cyberspace Data and Intelligence, and Cyber-Living, Syndrome, and Health, International 2019 Cyberspace Congress, CyberDI and CyberLife, Beijing, China, December 16–18, 2019, Proceedings, Part I; Ning, H., Ed.; Springer: Singapore, 2019; pp. 433–449. [Google Scholar]
- Yan, F.; Ma, J.; Li, M.; Niu, R.; Tang, T. An Automated Accident Causal Scenario Identification Method for Fully Automatic Operation System Based on STPA. IEEE Access 2021, 9, 11051–11064. [Google Scholar] [CrossRef]
- Zhu, D.; Tan, H.; Yao, S. Petri Nets-based method to elicit component-interaction related safety requirements in safety-critical systems. Comput. Electr. Eng. 2018, 71, 162–172. [Google Scholar] [CrossRef]
- Valdez Banda, O.A.; Kannos, S.; Goerlandt, F.; van Gelder, P.H.A.J.; Bergström, M.; Kujala, P. A systemic hazard analysis and management process for the concept design phase of an autonomous vessel. Reliab. Eng. Syst. Saf. 2019, 191, 106584. [Google Scholar] [CrossRef]
- Hwang, T.; Youn, I. Development of a Graph-Based Collision Risk Situation Model for Validation of Autonomous Ships’ Collision Avoidance Systems. J. Mar. Sci. Eng. 2023, 11, 2037. [Google Scholar] [CrossRef]
- Fan, S.; Shi, K.; Weng, J.; Yang, Z. Letting losses be lessons: Human-machine cooperation in maritime transport. Reliab. Eng. Syst. Saf. 2025, 253, 110547. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, Y. Navigation Risk Assessment of Autonomous Ships Based on Entropy–TOPSIS–Coupling Coordination Model. J. Mar. Sci. Eng. 2023, 11, 422. [Google Scholar] [CrossRef]
- Gouyon, D.; Pétin, J.; Cochard, T.; Devic, C. Architecture assessment for safety critical plant operation using reachability analysis of timed automata. Reliab. Eng. Syst. Saf. 2020, 199, 106923. [Google Scholar] [CrossRef]
- Johansen, T.; Blindheim, S.; Torben, T.R.; Utne, I.B.; Johansen, T.A.; Sørensen, A.J. Development and testing of a risk-based control system for autonomous ships. Reliab. Eng. Syst. Saf. 2023, 234, 109195. [Google Scholar] [CrossRef]
- Wang, H.; Zhong, D.; Zhao, T. Avionics system failure analysis and verification based on model checking. Eng. Fail. Anal. 2019, 105, 373–385. [Google Scholar] [CrossRef]
- Ma, Z.; Li, X.; Liu, Z.; Huang, R.; He, N. Model checking fuzzy computation tree logic of multi-agent systems based on fuzzy interpreted systems. Fuzzy Sets Syst. 2024, 485, 108966. [Google Scholar] [CrossRef]
- Alexiou, N.; Basagiannis, S.; Petridou, S. Formal security analysis of near field communication using model checking. Comput. Secur. 2016, 60, 1–14. [Google Scholar] [CrossRef]
- Bae, K.; Meseguer, J. Model checking linear temporal logic of rewriting formulas under localized fairness. Sci. Comput. Program. 2015, 99, 193–234. [Google Scholar] [CrossRef]
- Dakwat, A.L.; Villani, E. System safety assessment based on STPA and model checking. Saf. Sci. 2018, 109, 130–143. [Google Scholar] [CrossRef]
- Leveson, N. Engineering a Safer World: Systems Thinking Applied to Safety; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Leveson, N. A systems approach to risk management through leading safety indicators. Reliab. Eng. Syst. Saf. 2015, 136, 17–34. [Google Scholar] [CrossRef]
- Chaal, M.; Valdez Banda, O.A.; Glomsrud, J.A.; Basnet, S.; Hirdaris, S.; Kujala, P. A framework to model the STPA hierarchical control structure of an autonomous ship. Saf. Sci. 2020, 132, 104939. [Google Scholar] [CrossRef]
- Wróbel, K.; Gil, M.; Montewka, J. Towards a method evaluating control actions in stpa-based model of ship-ship collision avoidance process. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, OMAE 2018, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Zhou, X.; Liu, Z.; Wang, F.; Wu, Z.; Cui, R. Towards applicability evaluation of hazard analysis methods for autonomous ships. Ocean Eng. 2020, 214, 107773. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, Z.; Wang, F.; Wu, Z. A system-theoretic approach to safety and security co-analysis of autonomous ships. Ocean Eng. 2021, 222, 108569. [Google Scholar] [CrossRef]
- Cheng, T.; Utne, I.B.; Wu, B.; Wu, Q. A novel system-theoretic approach for human-system collaboration safety: Case studies on two degrees of autonomy for autonomous ships. Reliab. Eng. Syst. Saf. 2023, 237, 109388. [Google Scholar] [CrossRef]
- Fan, S.; Yang, Z. Safety and security co-analysis in transport systems: Current state and regulatory development. Transp. Res. Part A Policy Pract. 2022, 166, 369–388. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, D.; Han, B.; Wan, C. Risk and reliability analysis for maritime autonomous surface ship: A bibliometric review of literature from 2015 to 2022. Accid. Anal. Prev. 2023, 187, 107090. [Google Scholar] [CrossRef] [PubMed]
- Clarke, E.M.; Emerson, E.A. Design and synthesis of synchronization skeletons using branching time temporal logic. In Workshop on Logic of Programs; Kozen, D., Ed.; Springer: Berlin/Heidelberg, Germany, 1982; pp. 52–71. [Google Scholar]
- Queille, J.P.; Sifakis, J. Specification and verification of concurrent systems in CESAR. In Proceedings of the 5th Colloquium on International Symposium on Programming; Dezani-Ciancaglini, M., Montanari, U., Eds.; Springer: Berlin/Heidelberg, Germany, 1982; pp. 337–351. [Google Scholar]
- Alur, R.; Dill, D.L. Automata-theoretic Verification of Real-Time Systems. In Formal Methods for Real-Time Computing; Heitmeyer, C., Mandrioli, D., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 1996; pp. 55–82. [Google Scholar]
- Magureanu, G.; Gavrilescu, M.; Pescaru, D. Validation of static properties in unified modeling language models for cyber physical systems. J. Zhejiang Univ. Sci. C 2013, 14, 332–346. [Google Scholar] [CrossRef]
- Cha, S.; Son, H.; Yoo, J.; Jee, E.; Seong, P.H. Systematic evaluation of fault trees using real-time model checker UPPAAL. Reliab. Eng. Syst. Saf. 2003, 82, 11–20. [Google Scholar] [CrossRef]
- Vicenzutti, A.; Menis, R.; Sulligoi, G. All-Electric Ship-Integrated Power Systems: Dependable Design Based on Fault Tree Analysis and Dynamic Modeling. IEEE Trans. Transp. Electrif. 2019, 5, 812–827. [Google Scholar] [CrossRef]
- Vogel, T.; Carwehl, M.; Rodrigues, G.N.; Grunske, L. A property specification pattern catalog for real-time system verification with UPPAAL. Inf. Softw. Technol. 2023, 154, 107100. [Google Scholar] [CrossRef]
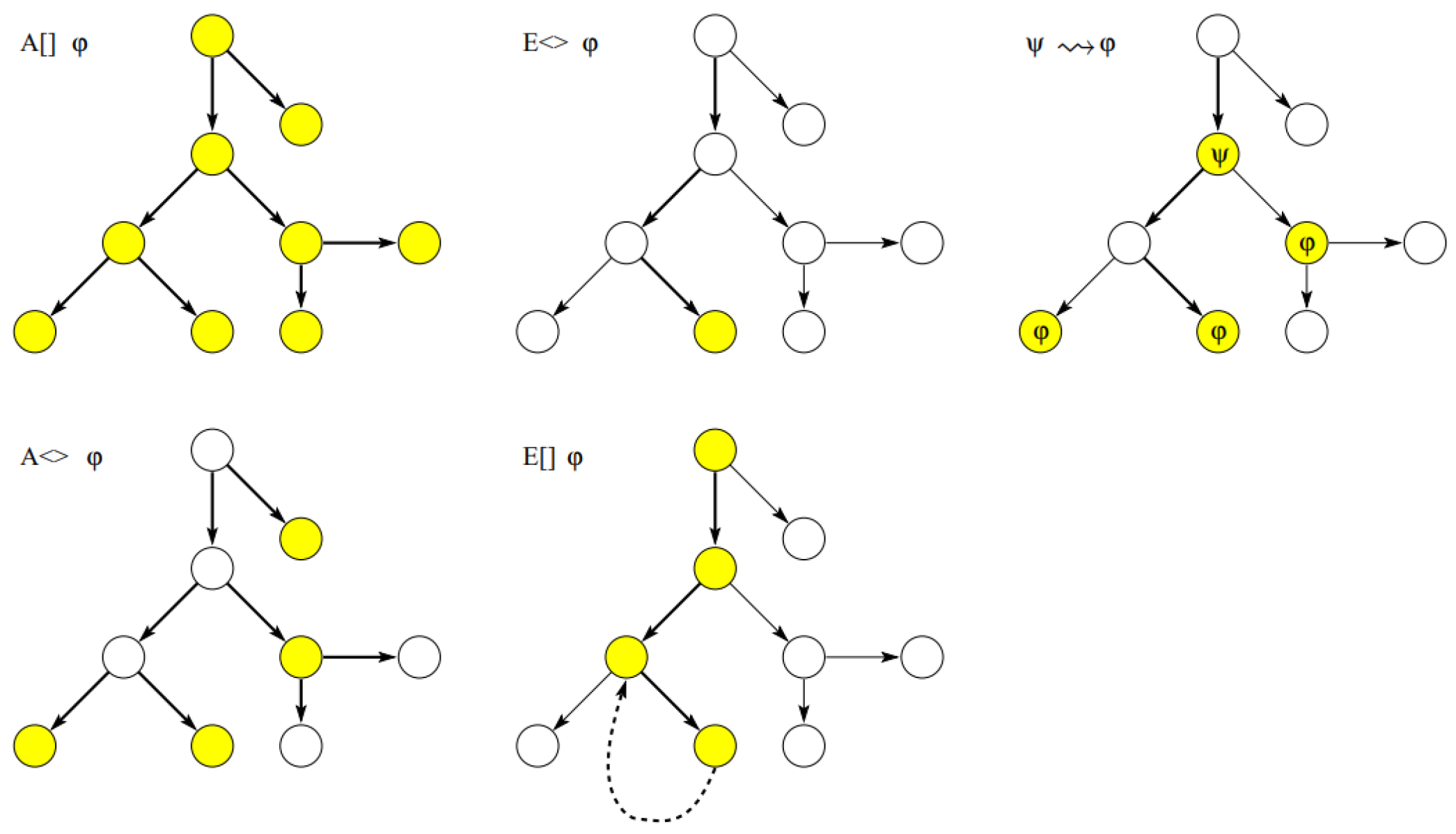



| BNF Syntax | Meaning | Equivalent Property |
|---|---|---|
| E<>p (possibly) | A path exists where property p is satisfied at a particular state along the path. | |
| E[]p (invariantly) | A path exists where property p is satisfied at every state along the path. | |
| A<>p (potentially always) | Across all paths, property p is satisfied at least once on each path. | ¬E[]¬p |
| A[]p (eventually) | Across all paths, property p is satisfied at every state on each path. | ¬E<>¬p |
(lead to) | If property p holds, it enables the satisfaction of property q. | A<>(p imply A<>q) |
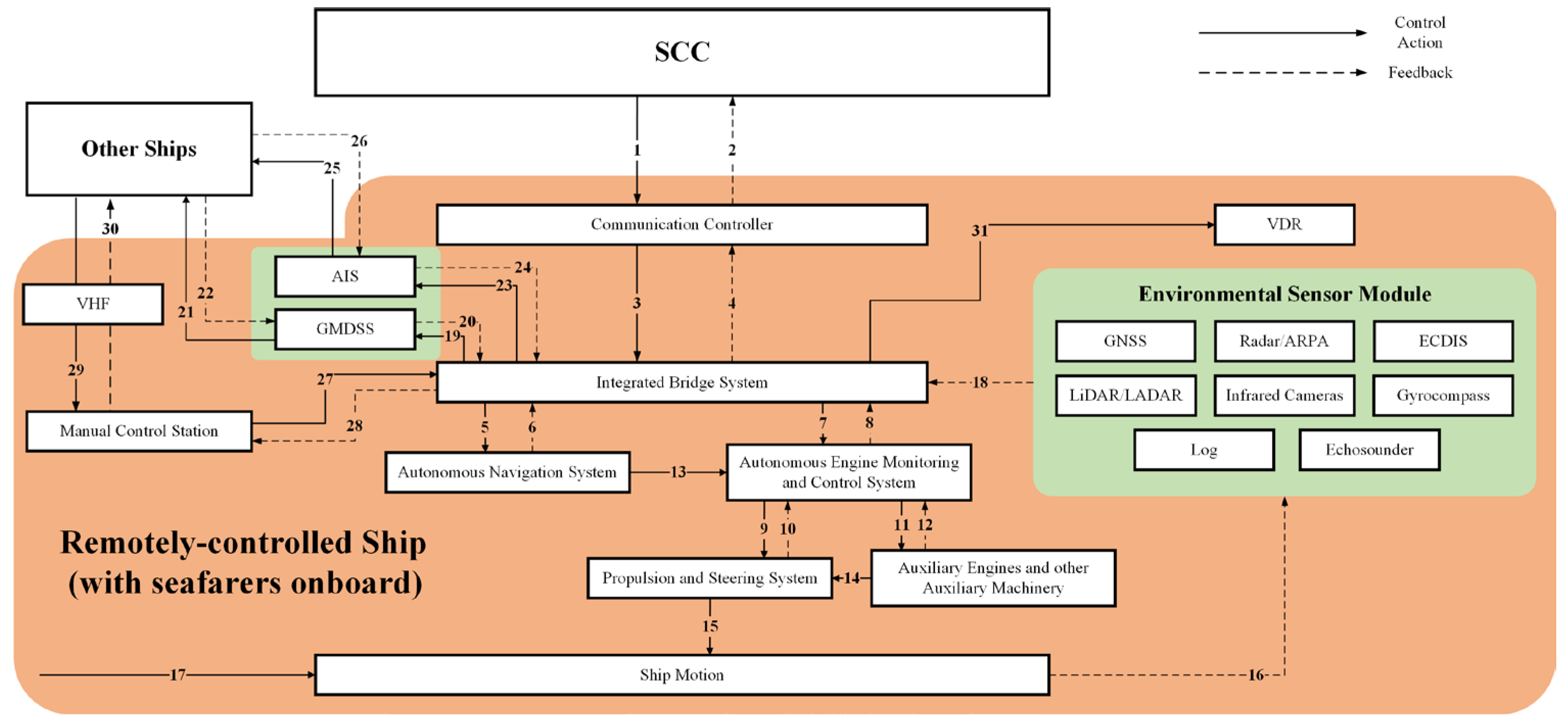
| ID | Description of Control Behaviors/Feedback | UPPAAL Channels |
|---|---|---|
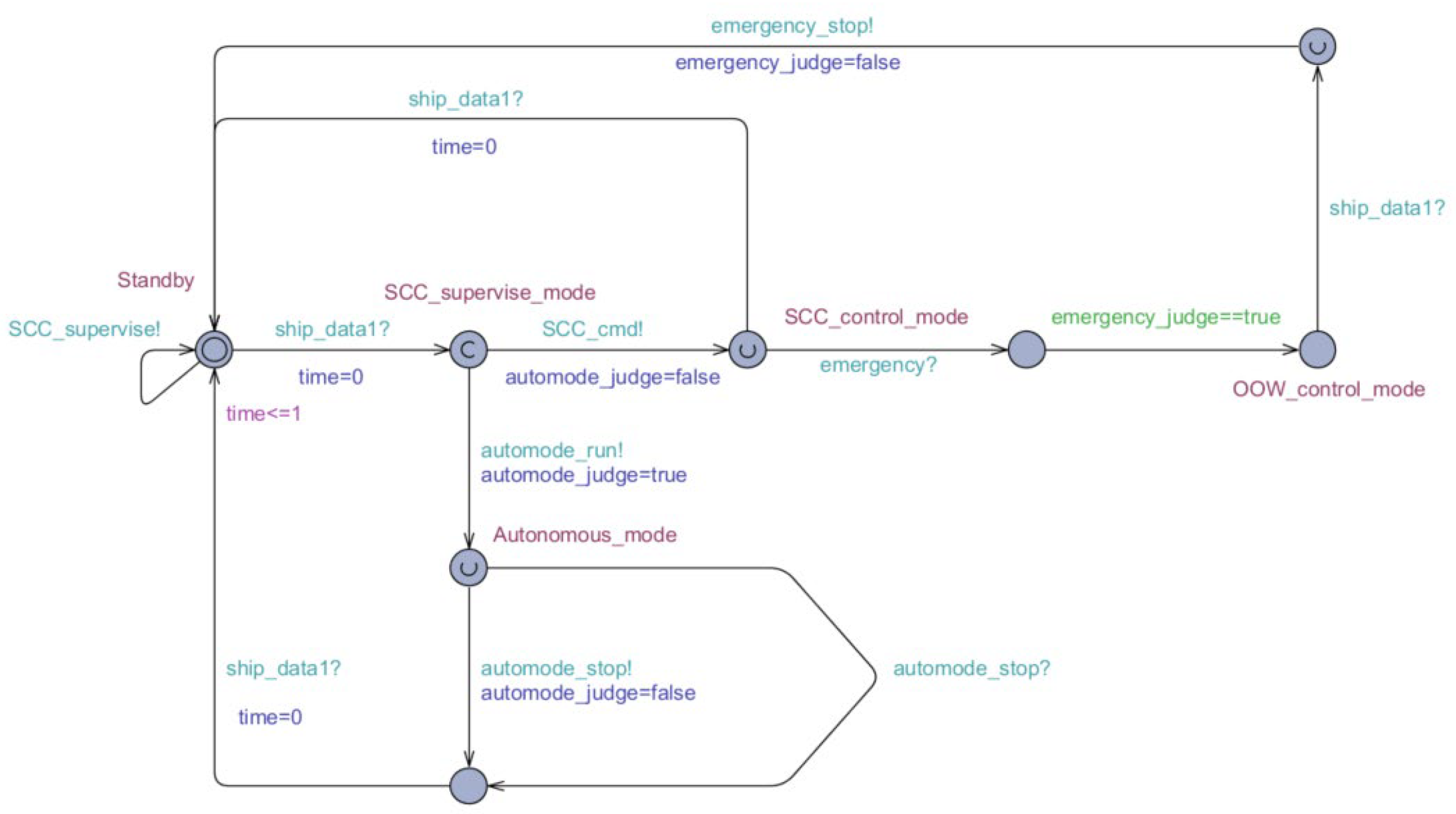
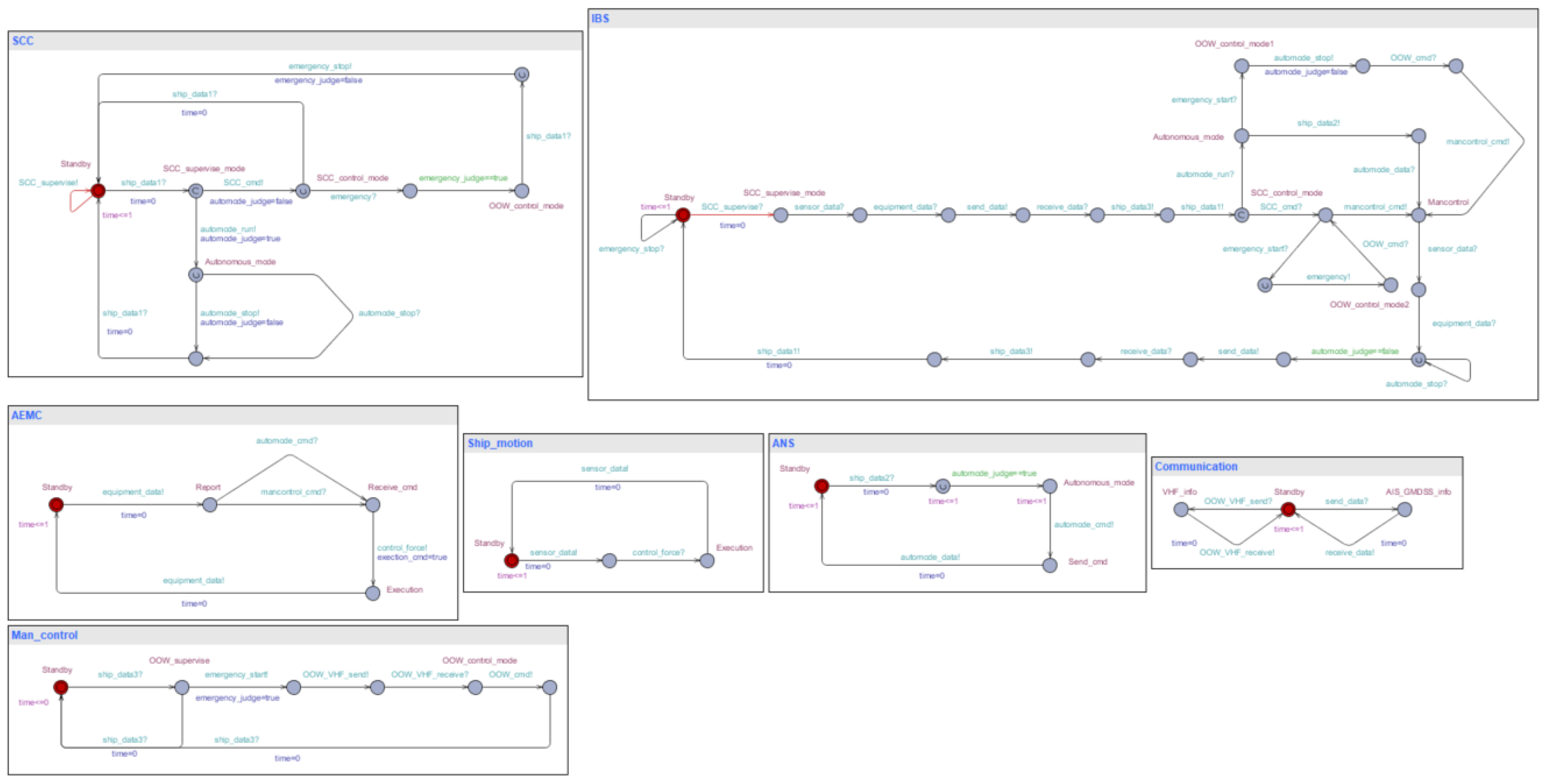
| 1/3 | Shore-based operators at SCC fulfill the responsibility of monitoring vessel navigation and transmitting decisions to the ship via communication links to control and maneuver the vessel. | SCC_supervise SCC_cmd |
| 2/4 | Data sets such as vessel status information and environmental sensor data are transmitted to the SCC via communication links for purposes such as updating ship trajectories and making decisions, enabling SCC shore-based operators to supervise vessel navigation. | ship_data |
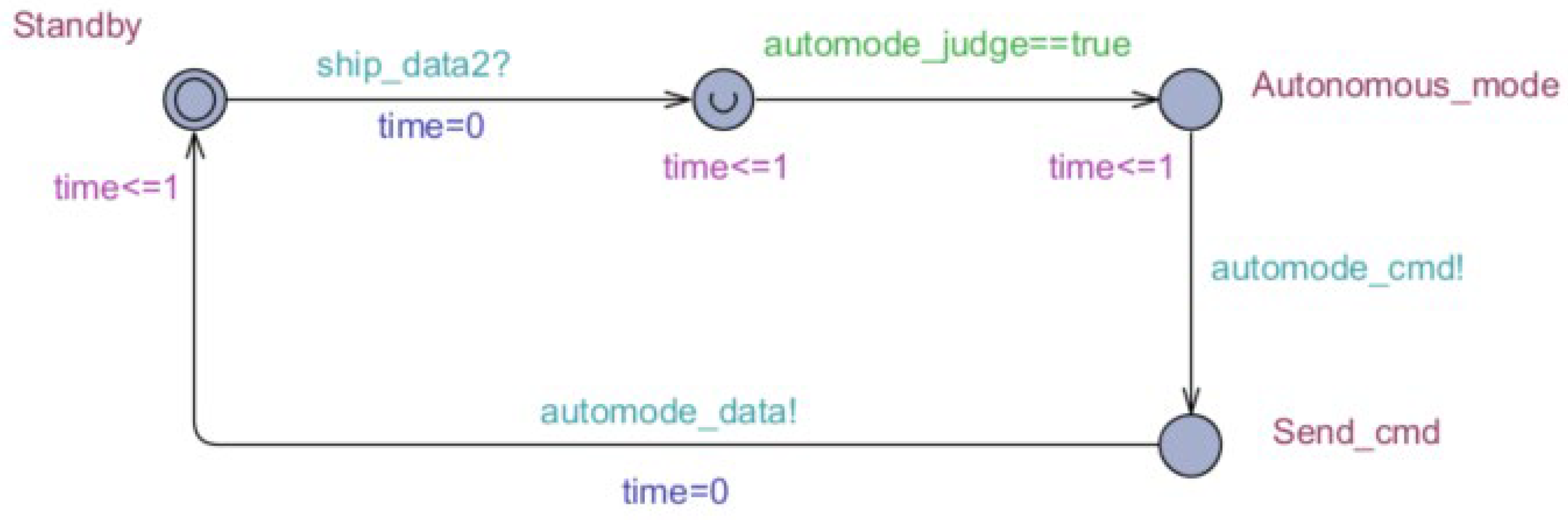
| 5 | In autonomous operating mode, the IBS provides the ANS with the necessary information, such as vessel status and environmental sensor data, for the decision-making of route planning and collision avoidance. | automode_run aotomode_stop ship_data |
| 6 | In autonomous operation mode, the decision information formulated by the ANS is fed back to the IBS, allowing the SCC and the Officer of the Watch (OOW) to supervise ship operations and the execution of actions. | automode_data |
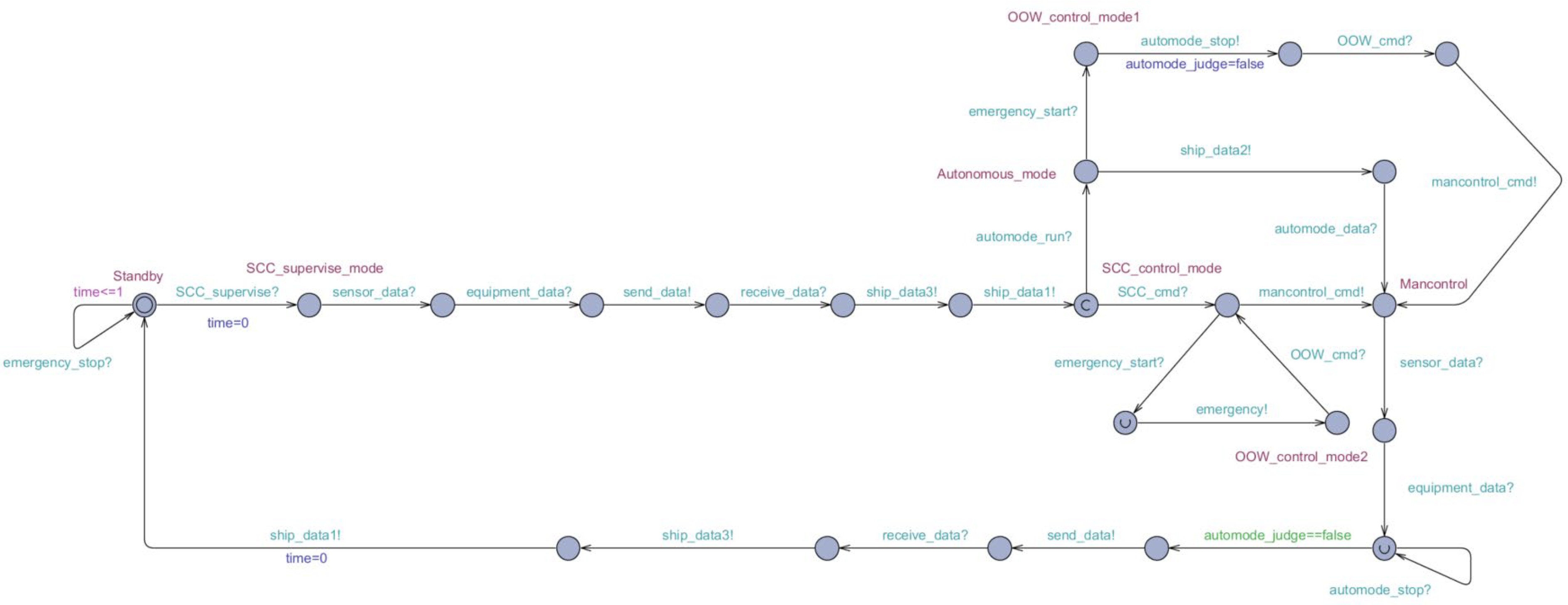
| 7/9/11/14 | The operating parameters of the AEMC system are controlled based on commands from the SCC and the OOW, and the ship’s speed and course are managed. | mancontrol_cmd |
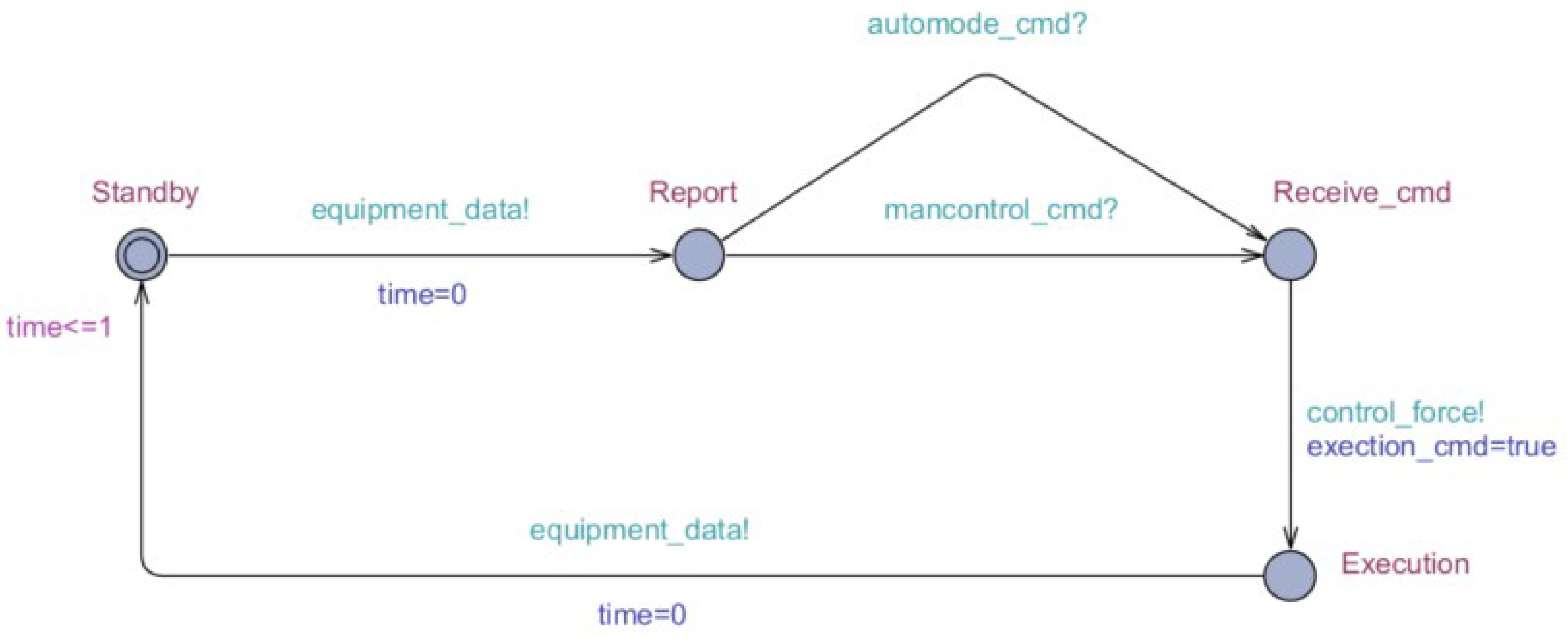
| 8/10/12 | All observed measurements from the engine room (including equipment and process state data) are received and fed back to the IBS for configuration and reconfiguration, simultaneously enabling the SCC and OOW to oversee the effectiveness of the actions implemented. | equipment_data |
| 13 | In autonomous operation mode, control the operating parameters of the AEMC system based on instructions from the ANS and manage the ship’s speed and course. | automode_cmd |
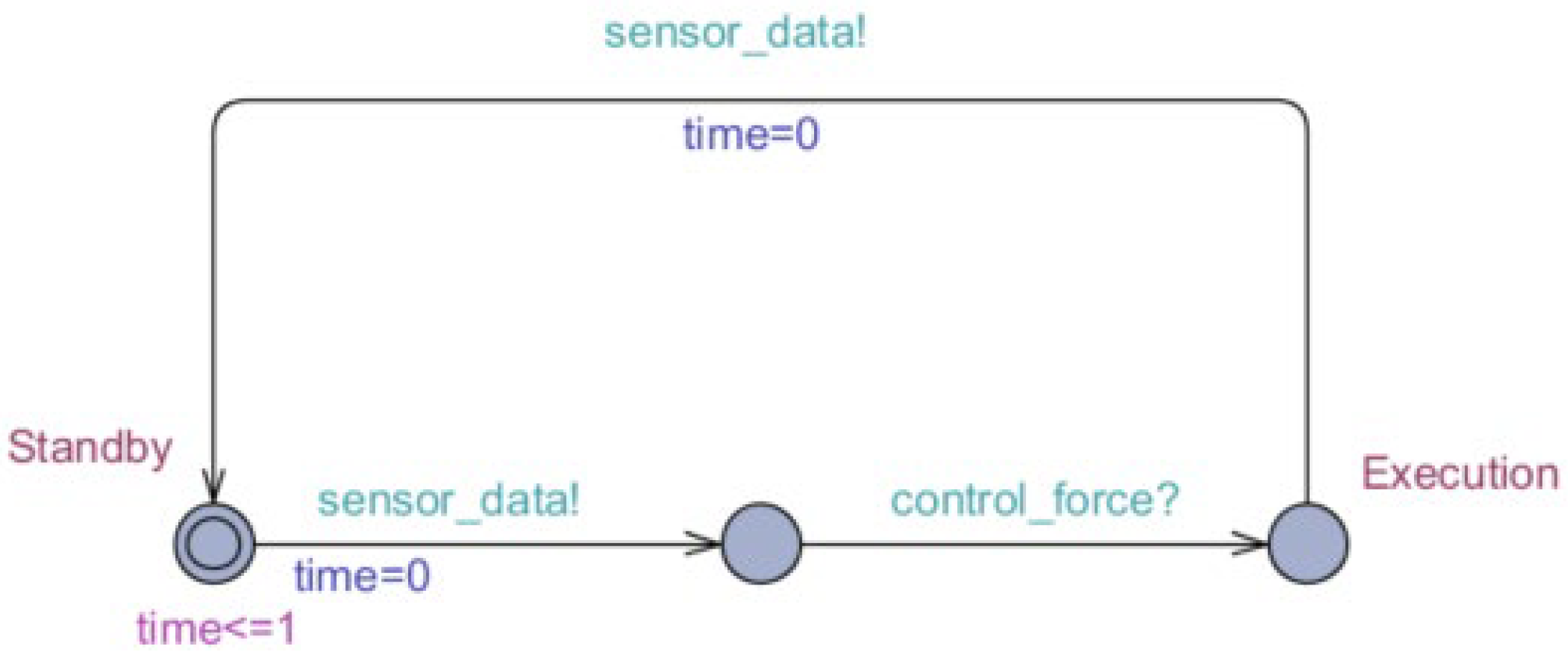
| 15 | Execute decisions, applying thrust and steering force to modify the ship’s speed and heading. | control_force |
| 16/17/18 | As the ship moves, it can be affected by wind, waves, and currents. The environmental sensor module uses sensors to assess the ship’s navigational and environmental status, and it also detects, tracks, and categorizes other ships and obstacles. The sensor data mentioned is relayed back to the IBS so that the SCC and OOW can oversee the ship’s navigational status, helping them make further decisions and adjustments as needed. | sensor_data |
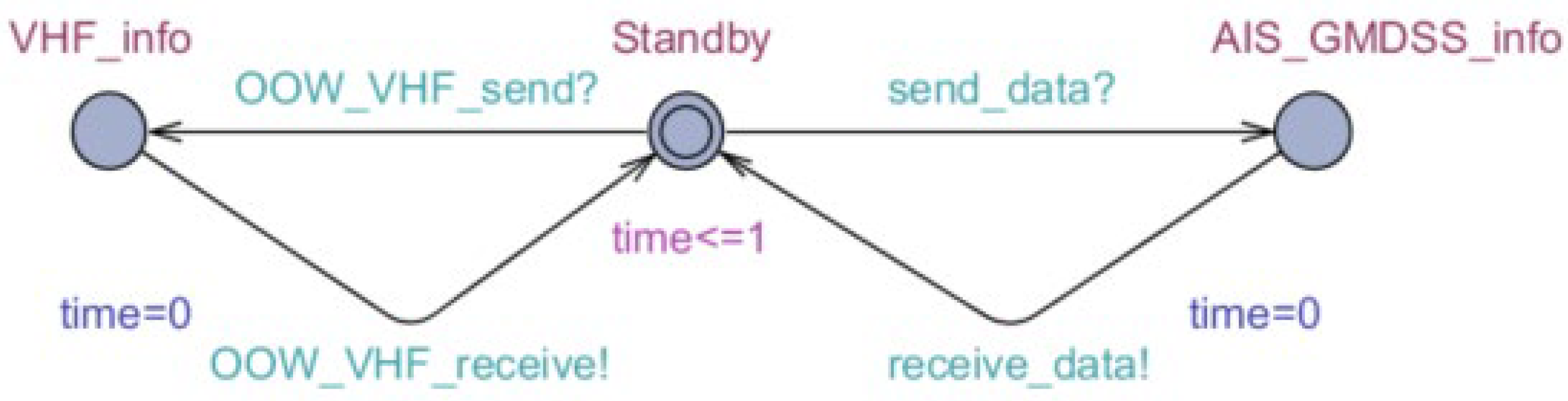
| 19/21/23/25 | Using AIS and GMDSS, the ownship supplies other vessels with its navigational status and other essential information needed for collision avoidance. | send_data |
| 20/22/24/26 | Using AIS and GMDSS, the ownship receives navigational status information and other essential information needed for collision avoidance from other vessels. | receive_data |
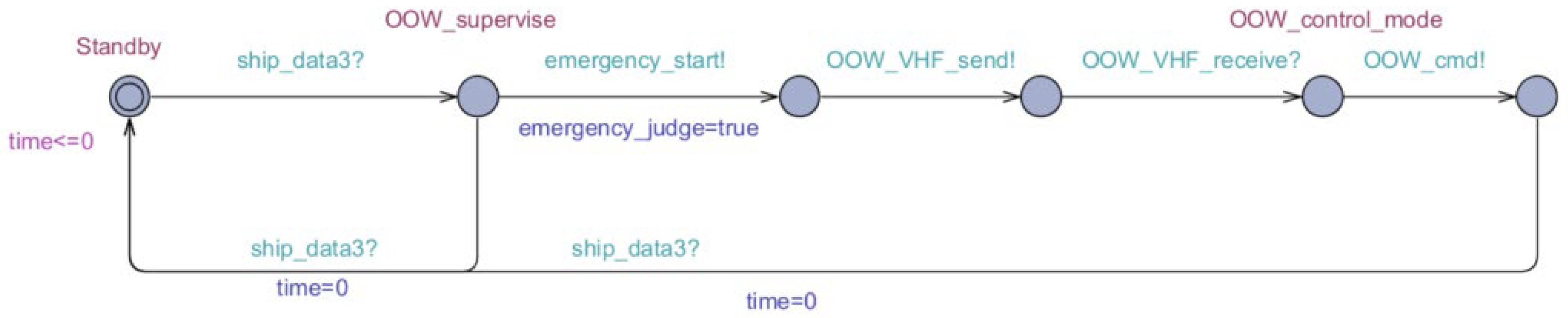
| 27 | Take over control of the ship in necessary or emergency circumstances. | OOW_cmd |
| 28 | Data sets such as ship status information and environmental sensor readings are relayed to the manual control station, facilitating updates to ship trajectories and decision-making, thereby enabling the OOW to oversee navigation. | ship_data OOW_supervise |
| 29/30 | While on the navigational watch, the OOW uses VHF to communicate with other vessels and facilitate collision avoidance actions. | OOW_VHF_send OOW_VHF_receive |
| Verification Properties | BNF Statements |
|---|---|
| All states are reachable | A[] not deadlock |
| SCC operates normally | A<> SCC.Standby or SCC.SCC_supervise_mode or SCC.SCC_control_mode or SCC.OOW_control_mode or SCC.Autonomous_mode |
| IBS operates normally | A<> IBS.Standby or IBS.SCC_supervise_mode or IBS.SCC_control_mode or IBS.OOW_control_mode1 or IBS.OOW_control_mode2 or IBS.Autonomous_mode |
| AEMC system operates normally | A<> AEMC.Standby or AEMC.Report or AEMC.Receive_cmd or AEMC.Execution |
| ANS operates normally | A<> ANS.Standby or ANS.Autonomous_mode or ANS.Send_cmd |
| The manual control station operates normally | A<> Man_control.Standby or Man_control.OOW_supervise or Man_control.OOW_control_mode |
| The ownship correctly executes received commands and adjusts its course and speed | A<> Ship_motion.Standby or Ship_motion.Execution |
| The ownship establishes correct communication with other vessels via VHF, AIS, GMDSS | A<> Communication.Standby or Communication.VHF_info or Communication.AIS_GMDSS_info |
| In autonomous operation mode, the SCC and OOW only perform supervisory duties | A<> automode_judge==true imply SCC.Autonomous_mode and Man_control.OOW_supervise and not (SCC.SCC_control_mode and SCC.OOW_control_mode and IBS.SCC_control_mode and IBS.OOW_control_mode1 and IBS.OOW_control_mode2 and Man_control.OOW_control_mode) |
| In an emergency, the OOW takes over ship control and stops autonomous operation | A<> emergency_judge==true imply not (SCC.Autonomous_mode and IBS.Autonomous_mode and ANS.Autonomous_mode) and (Man_control.OOW_control_mode and SCC.OOW_control_mode and IBS. OOW_control_mode1 or IBS.OOW_control_mode2) and automode_judge==false |
| Control Action | Not Providing Causes Hazard | Providing Causes Hazard | Too Early, Too Late, Out of Order Causes Hazard | Applied Too Long, Stopped Too Soon, Causes Hazard |
|---|---|---|---|---|
| Course and speed control | UCA-1: Course and speed control are not provided when the ownship is a give-way ship only if the risk of collision exists. UCA-2: Course and speed control are not provided when there is a close-quarters situation or immediate danger between ownship and the other ship. | UCA-3: Course and speed control are provided when the ownship is a stand-on ship only if the risk of collision exists. | UCA-4: Course and speed control are provided too late when the ownship is a give-way ship only if the risk of collision exists. UCA-5: Course and speed control are provided too late when there is a close-quarters situation or immediate danger between ownship and other ship. | UCA-6: Course and speed control are stopped too soon when the ownship is a give-way ship only if the risk of collision exists. UCA-7: Course and speed control are stopped too soon when there is a close-quarters situation or immediate danger between ownship and other ship. |
| UCAs | Verification Properties | BNF Statements |
|---|---|---|
| UCA-1 UCA-2 | 1. Command was lost or not transmitted correctly. | E<> (SCC.SCC_control_mode imply not IBS.SCC_control_mode) or (SCC.Autonomous_mode imply not IBS.Autonomous_mode) or (Man_control.OOW_control_mode imply not (IBS.OOW_control_mode1 or IBS.OOW_control_mode2)) |
| 2. Command was transmitted correctly but not executed correctly. | E<> (IBS.Mancontrol imply not AEMC.Receive_cmd) or (ANS.Send_cmd imply not AEMC.Receive_cmd) | |
| 3. Command was transmitted and executed correctly, but the AEMC system did not respond correctly. | E<> AEMC.Receive_cmd imply not exection_cmd==true | |
| 4. Command was transmitted and executed correctly, but the ship’s motion state did not change. | E<> (AEMC.Execution or exection_cmd==true) imply not Ship_motion.Execution | |
| UCA-3 | 1. Command was not transmitted correctly. | E<> (SCC.SCC_control_mode imply not IBS.SCC_control_mode) or (SCC.Autonomous_mode imply not IBS.Autonomous_mode) or (Man_control.OOW_control_mode imply not (IBS.OOW_control_mode1 or IBS.OOW_control_mode2)) |
| 2. Command was transmitted correctly but not executed correctly. | E<> (IBS.Mancontrol imply not AEMC.Receive_cmd) or (ANS.Send_cmd imply not AEMC.Receive_cmd) | |
| 3. Command was transmitted and executed correctly, but the AEMC system did not respond correctly. | E<> AEMC.Receive_cmd imply not exection_cmd==true | |
| UCA-4 UCA-5 UCA-6 UCA-7 | 1. Command was not transmitted correctly. | E<> (SCC.SCC_control_mode imply not IBS.SCC_control_mode) or (SCC.Autonomous_mode imply not IBS.Autonomous_mode) or (Man_control.OOW_control_mode imply not (IBS.OOW_control_mode1 or IBS.OOW_control_mode2)) |
| 2. Command was transmitted correctly but not executed correctly. | E<> (IBS.Mancontrol imply not AEMC.Receive_cmd) or (ANS.Send_cmd imply not AEMC.Receive_cmd) | |
| 3. Command was transmitted and executed correctly, but the AEMC system did not respond correctly. | E<> AEMC.Receive_cmd imply not exection_cmd==true | |
| 4. Command was transmitted and executed correctly, but the adjustment of the ship’s motion state was incorrect. | E<> AEMC.Execution imply not Ship_motion.Execution |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.-Y.; Jin, S.; Mei, Y.; Sun, X.; Yang, X.; Nie, S.; Zhang, W. Towards Hazard Analysis Result Verification for Autonomous Ships: A Formal Verification Method Based on Timed Automata. J. Mar. Sci. Eng. 2025, 13, 1058. https://doi.org/10.3390/jmse13061058
Zhou X-Y, Jin S, Mei Y, Sun X, Yang X, Nie S, Zhang W. Towards Hazard Analysis Result Verification for Autonomous Ships: A Formal Verification Method Based on Timed Automata. Journal of Marine Science and Engineering. 2025; 13(6):1058. https://doi.org/10.3390/jmse13061058
Chicago/Turabian StyleZhou, Xiang-Yu, Shiqi Jin, Yang Mei, Xu Sun, Xue Yang, Shengzheng Nie, and Wenjun Zhang. 2025. "Towards Hazard Analysis Result Verification for Autonomous Ships: A Formal Verification Method Based on Timed Automata" Journal of Marine Science and Engineering 13, no. 6: 1058. https://doi.org/10.3390/jmse13061058
APA StyleZhou, X.-Y., Jin, S., Mei, Y., Sun, X., Yang, X., Nie, S., & Zhang, W. (2025). Towards Hazard Analysis Result Verification for Autonomous Ships: A Formal Verification Method Based on Timed Automata. Journal of Marine Science and Engineering, 13(6), 1058. https://doi.org/10.3390/jmse13061058