

Stochastic and Nonlinear Dynamic Response of Drillstrings in Deepwater Riserless Casing Drilling Operation




Abstract
1. Introduction
2. Dynamic Model
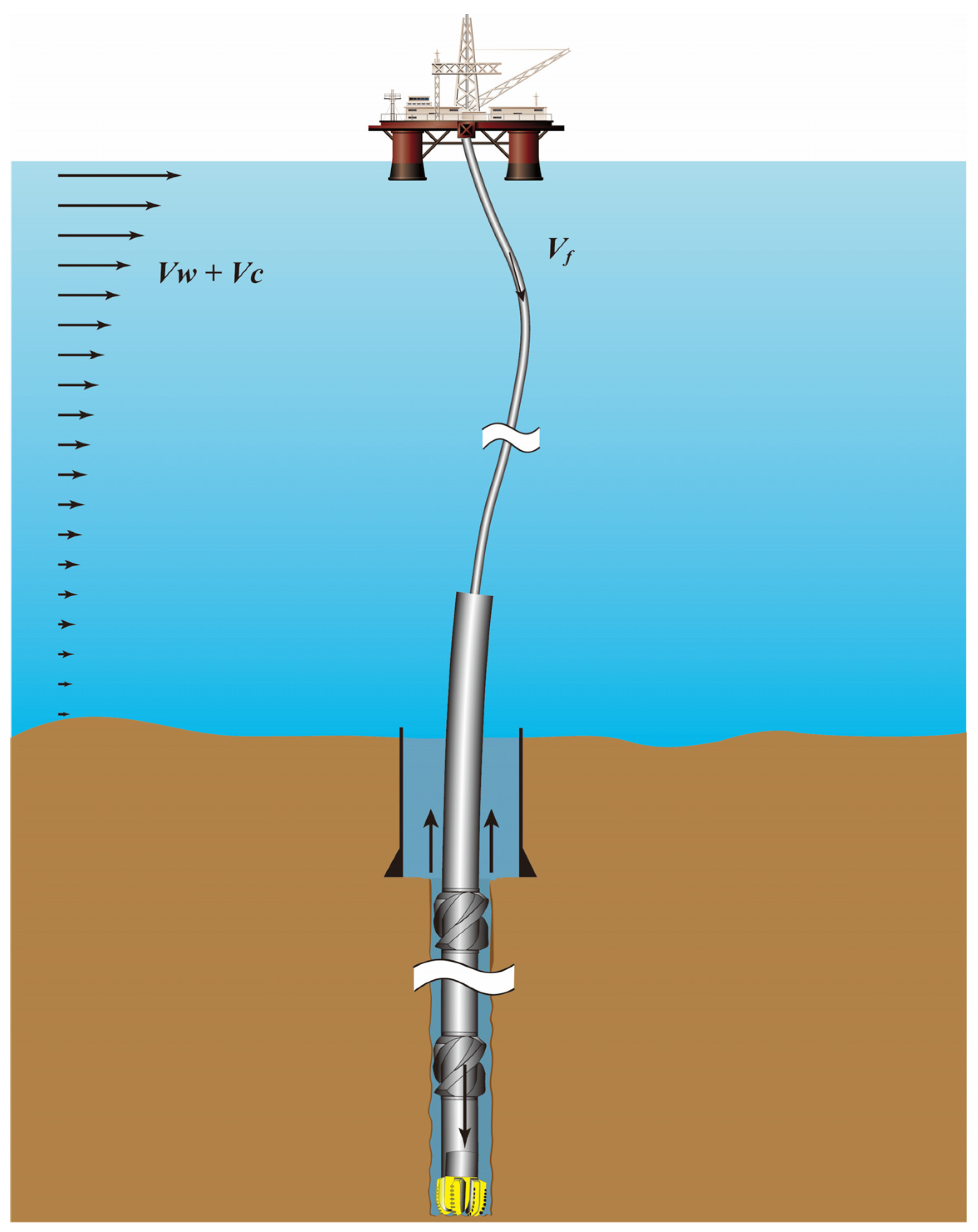
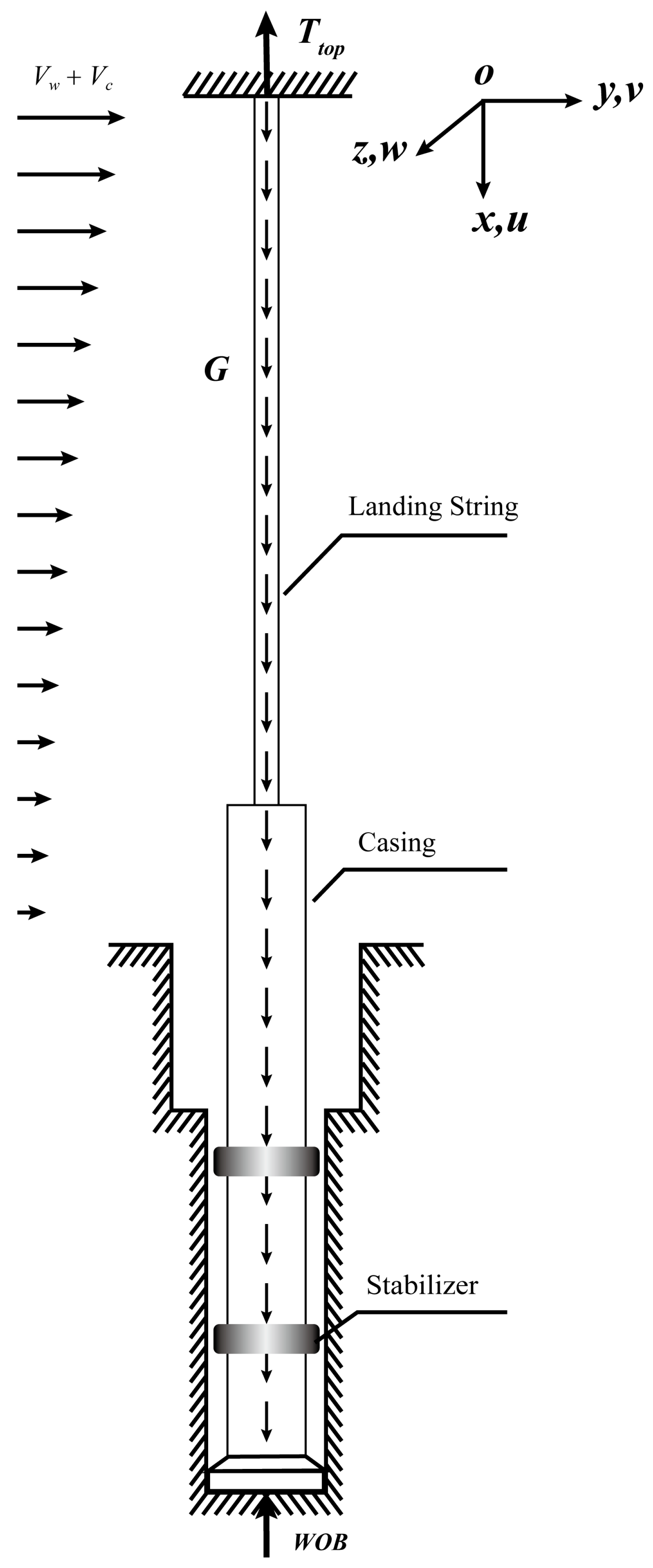
2.1. Problem Definitions
- (1)
- The material of the drilling assembly is isotropic and homogeneous;
- (2)
- The drilling assembly stays in a linear elastic deformation state during the vibration process, and the material nonlinearity is neglected;
- (3)
- Only the damping from ambient seawater and drilling fluid is considered, the structural damping is neglected;
- (4)
- The cross section of the drilling assembly is always perpendicular to its axis during the deformation process;
- (5)
- The drill bit is in consistent contact with the formation, the stick-slip and bit bounce are neglected;
- (6)
- The rotational speed of the drilling assembly keeps constant during the drilling process, and the rotational vibration is neglected;
- (7)
- The horizontal velocity component of the wave particle is coincident with the flow direction of the current.
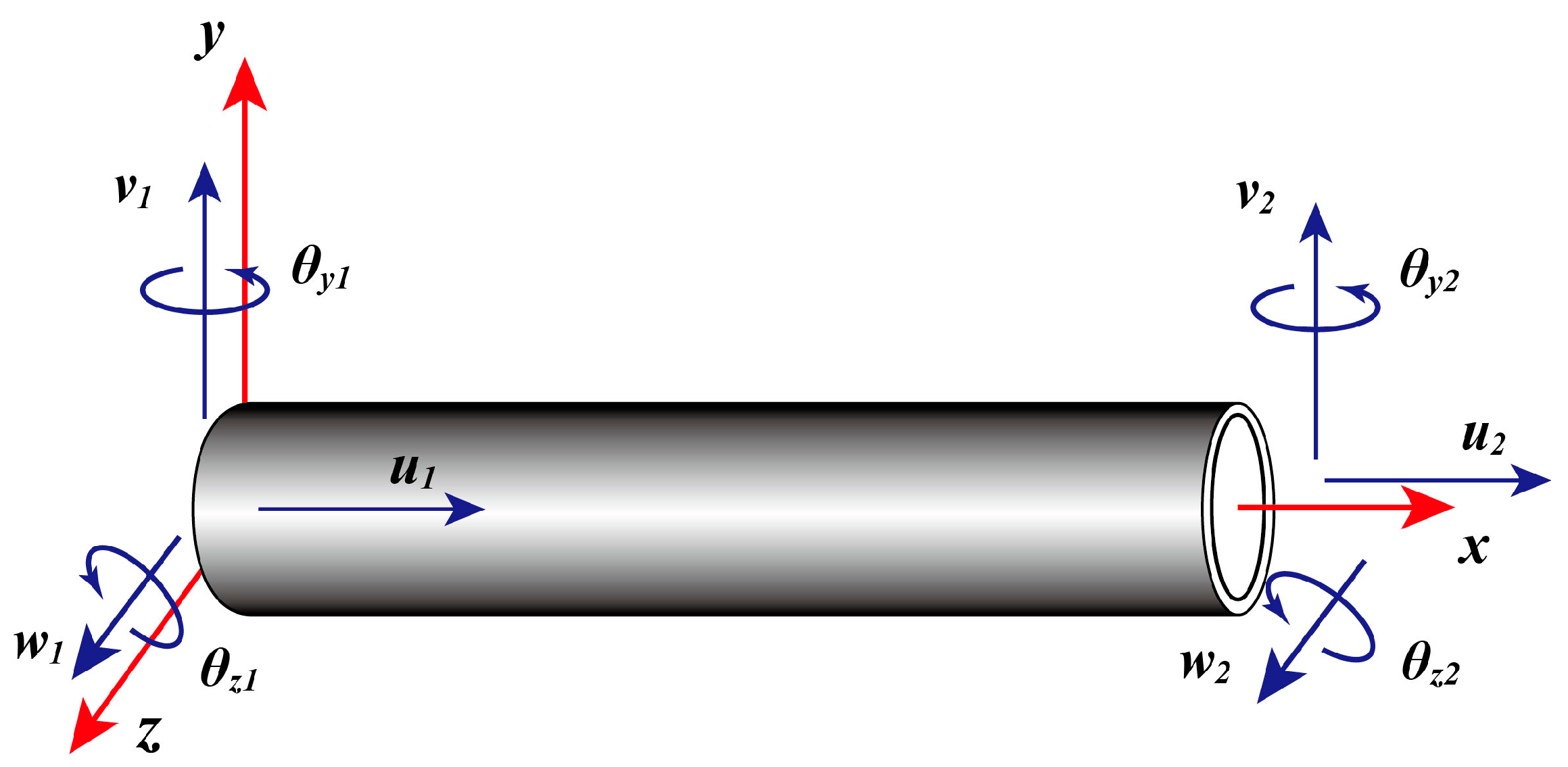
2.2. Finite Element Model
2.2.1. Kinetic Energy
2.2.2. Potential Energy
2.2.3. Virtual Work by Flowing Drilling Fluid
- (1)
- The inviscid fluid dynamic force and hydrostatic force of the flowing drilling fluid inside the drilling assembly;
- (2)
- The inviscid fluid dynamic force, viscous force and hydrostatic force of the flowing drilling fluid in the annulus between drilling assembly and wellbore wall;
- (3)
- The frictional force of flowing drilling fluid from both inside and outside of the drilling assembly.
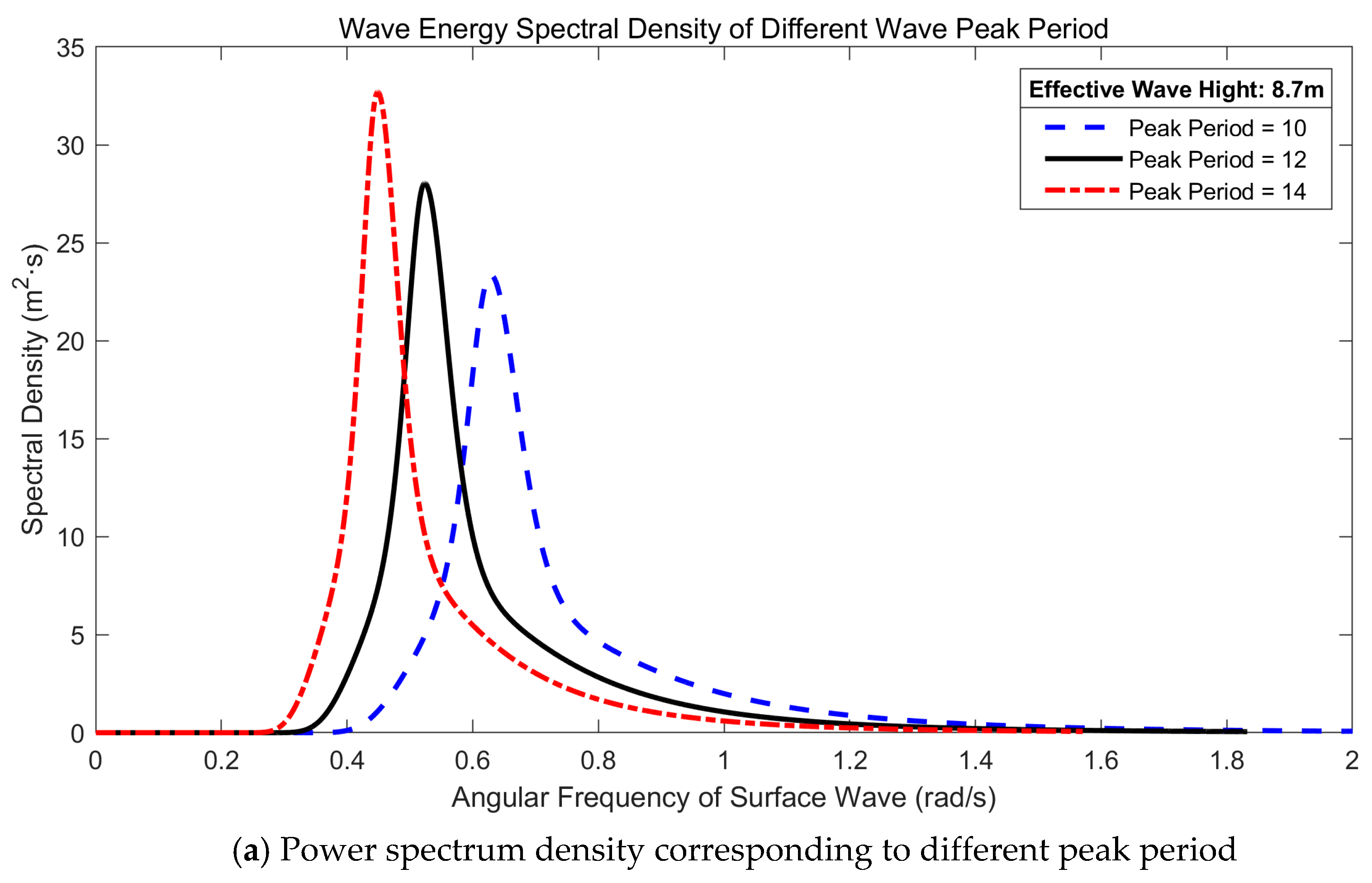
2.2.4. Combined Wave and Current Load
2.2.5. Effect of Wet Weight of the Drilling Assembly
2.2.6. Effect of Contact Force Between Drill String and Wellbore Wall
2.3. Boundary Conditions
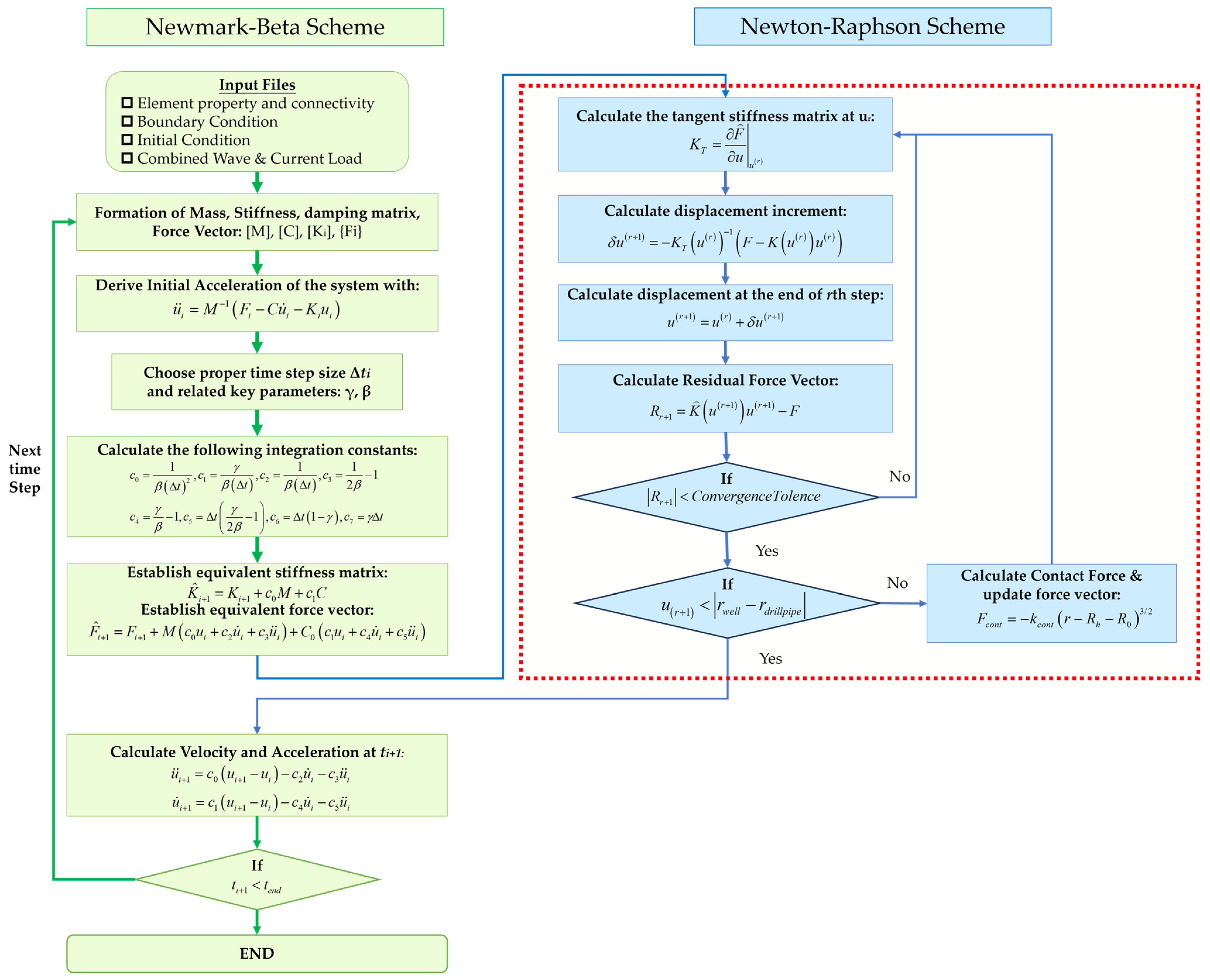
3. Solution Method
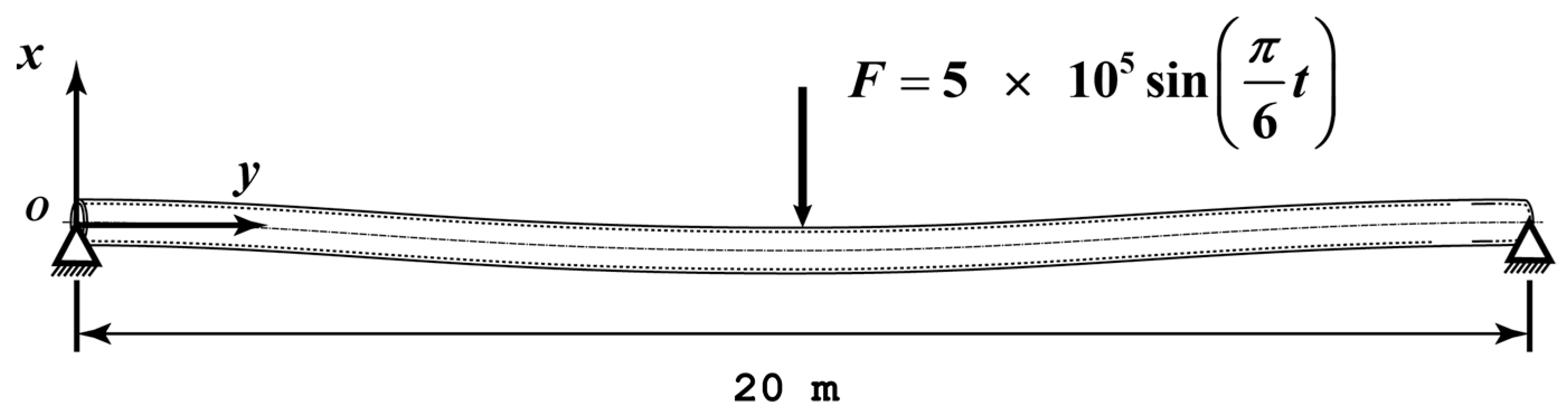
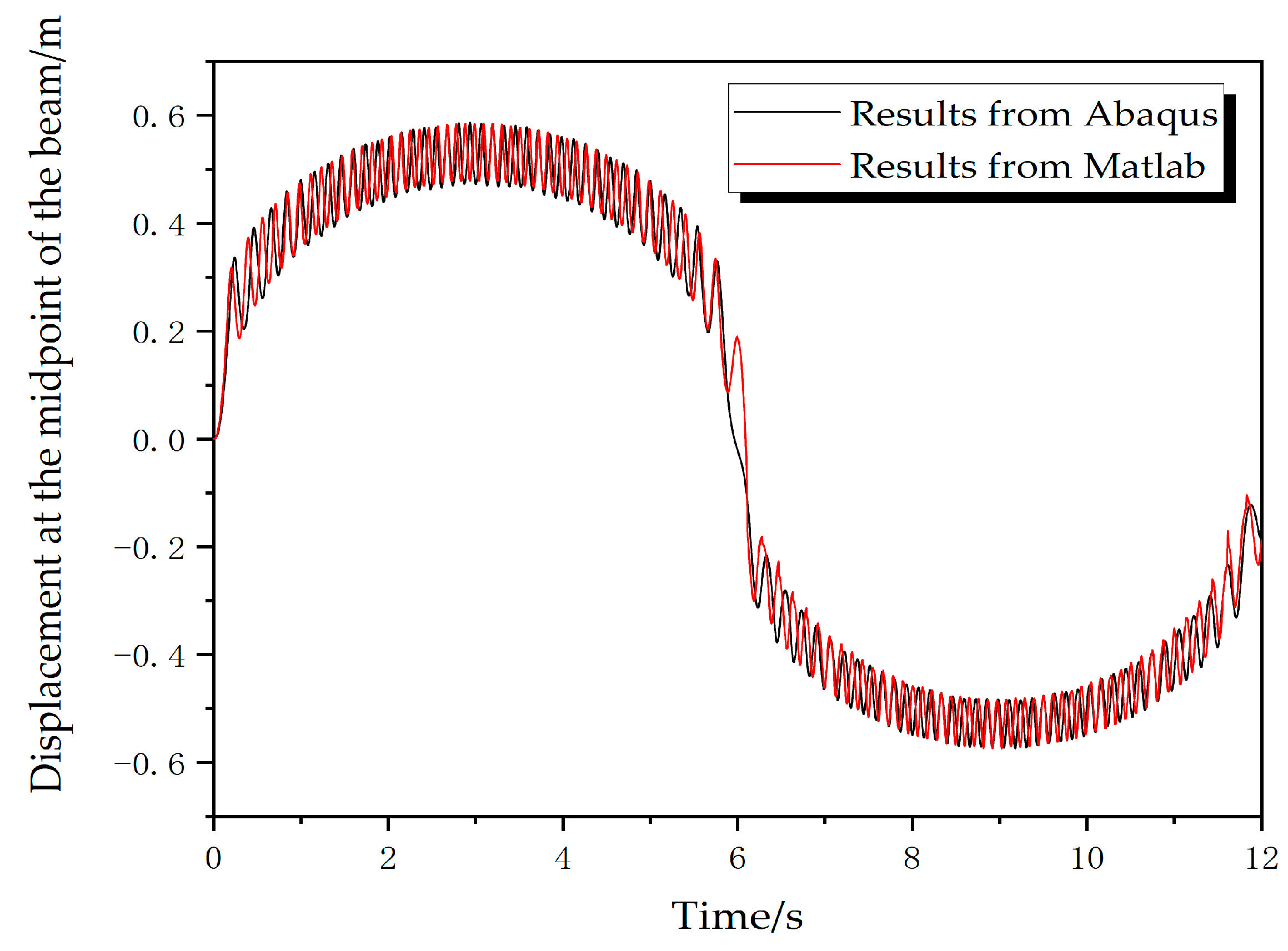
4. Model Verifications
5. Engineering Applications
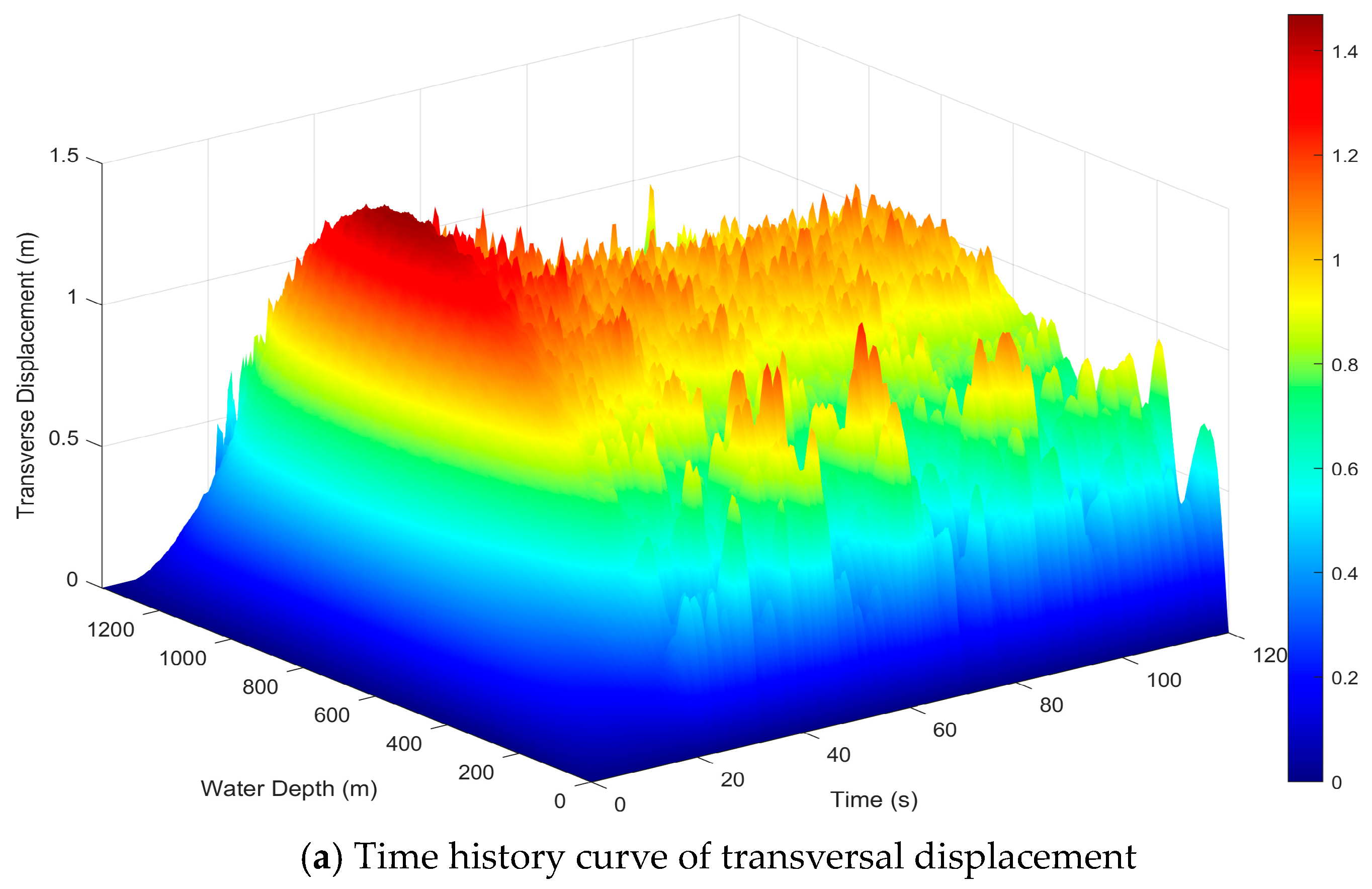
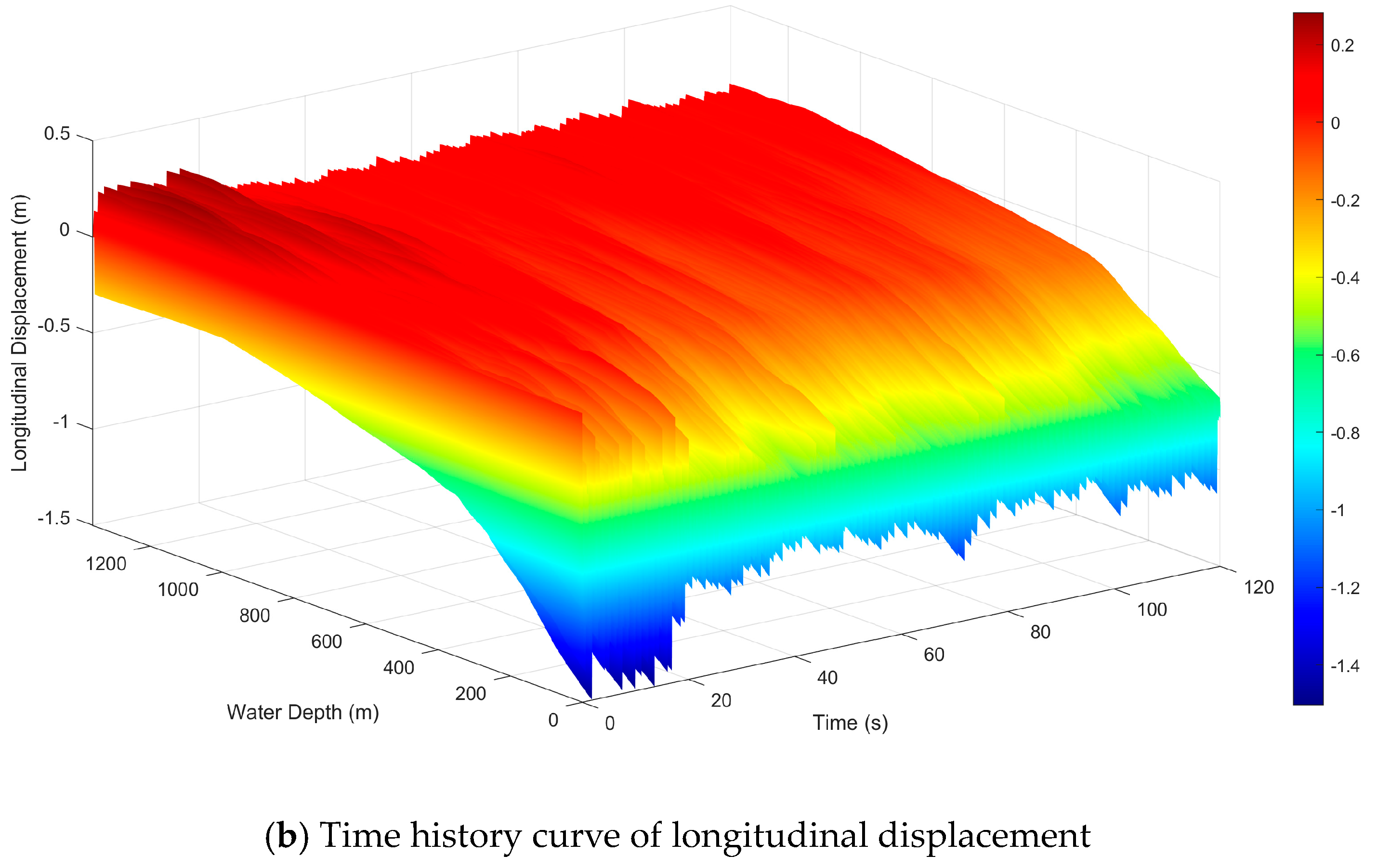
5.1. Dynamic Displacement Profile of the Drillstring
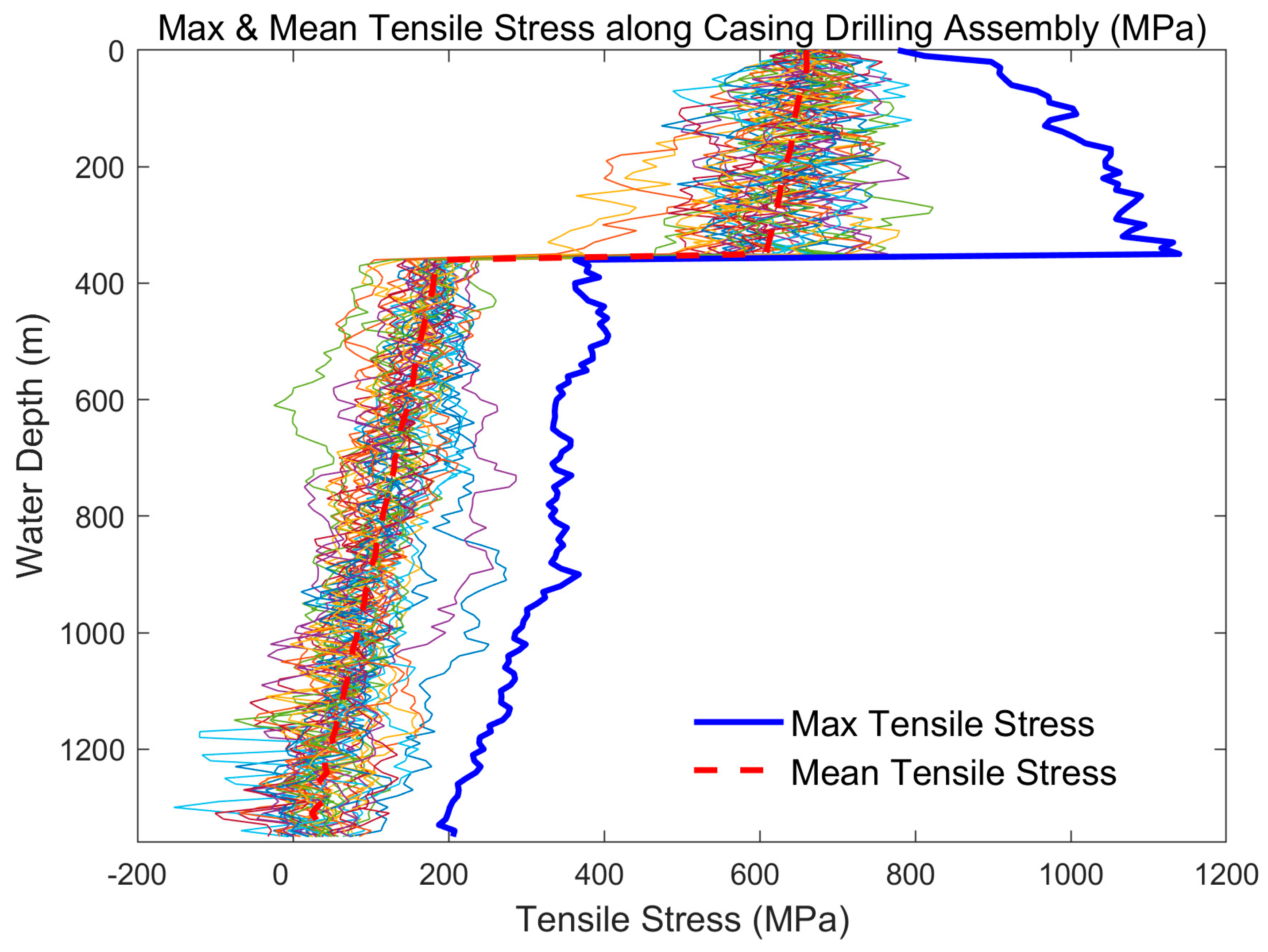
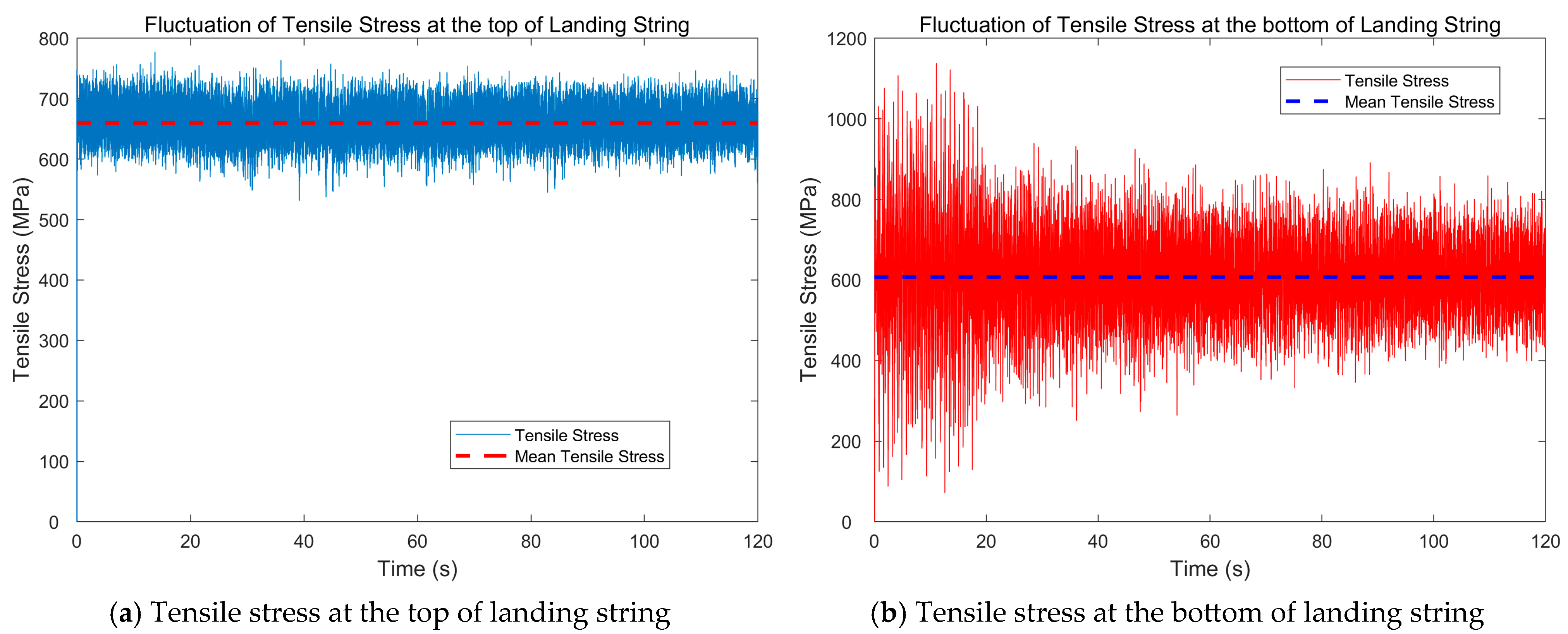
5.2. Distribution of Tensile Stresses on the Drillstring
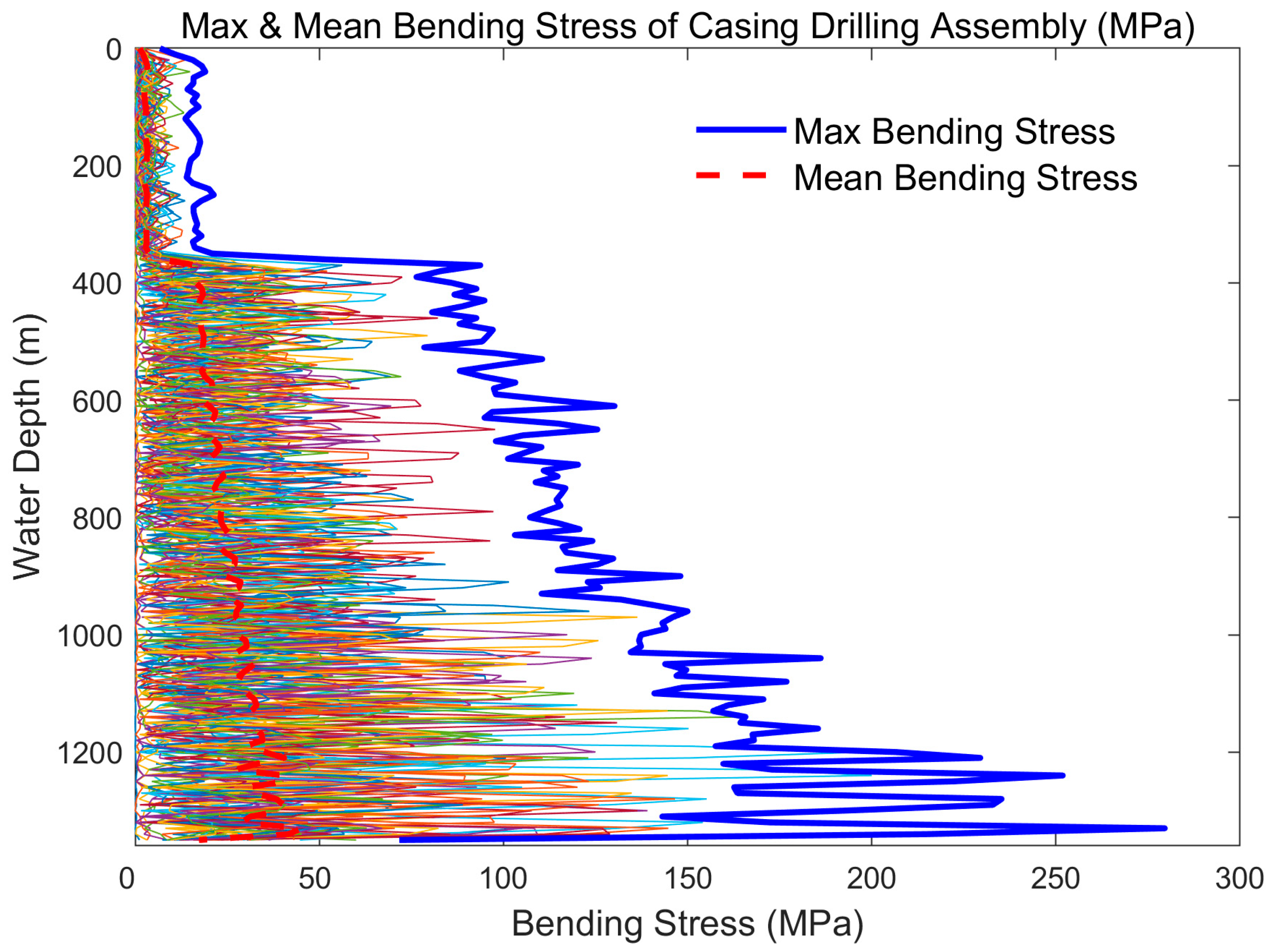
5.3. Distribution of Bending Stresses on the Casing Drilling Assembly
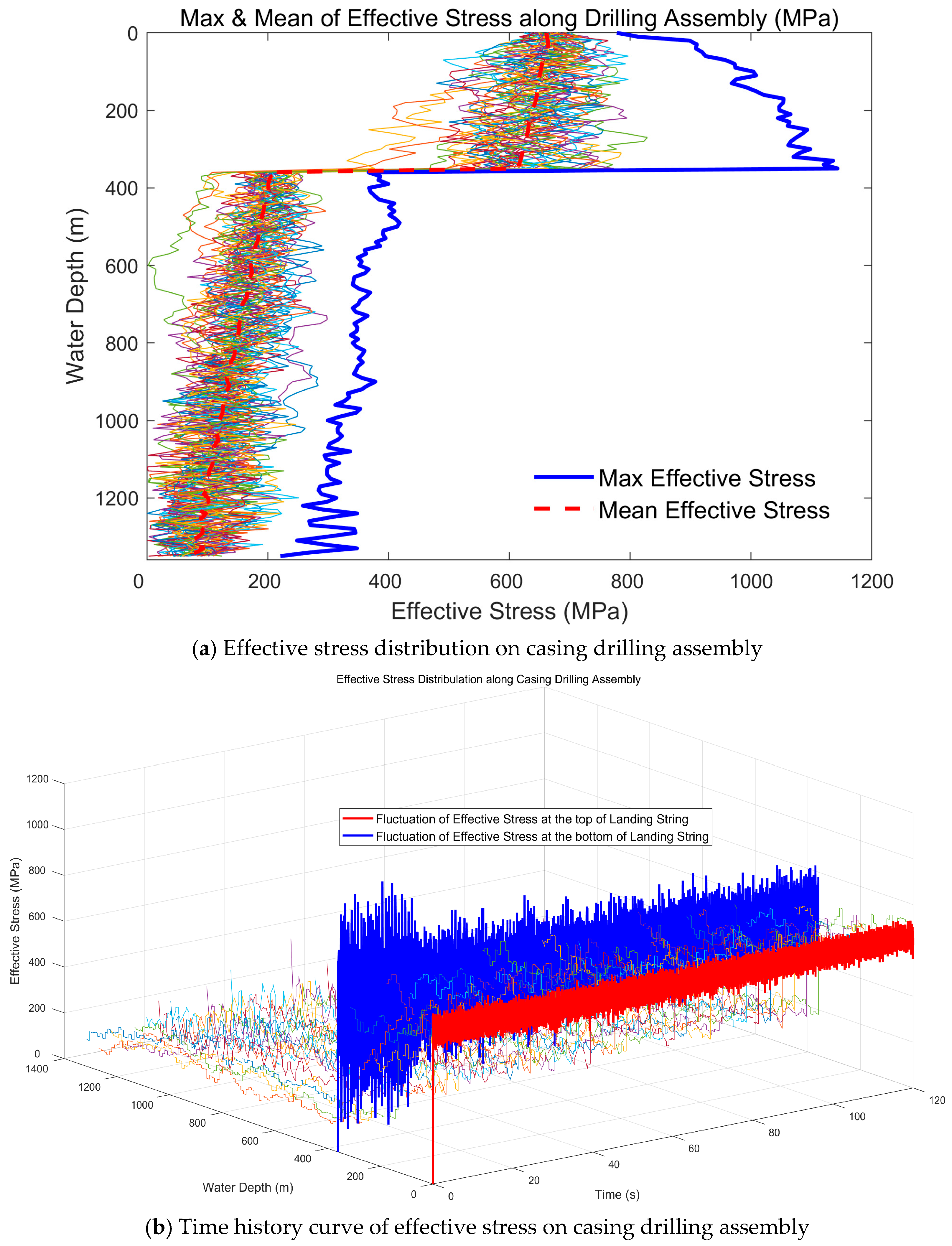
5.4. Distribution of Effective Stress on the Casing Drilling Assembly
5.5. Parameter Sensitivity Analysis
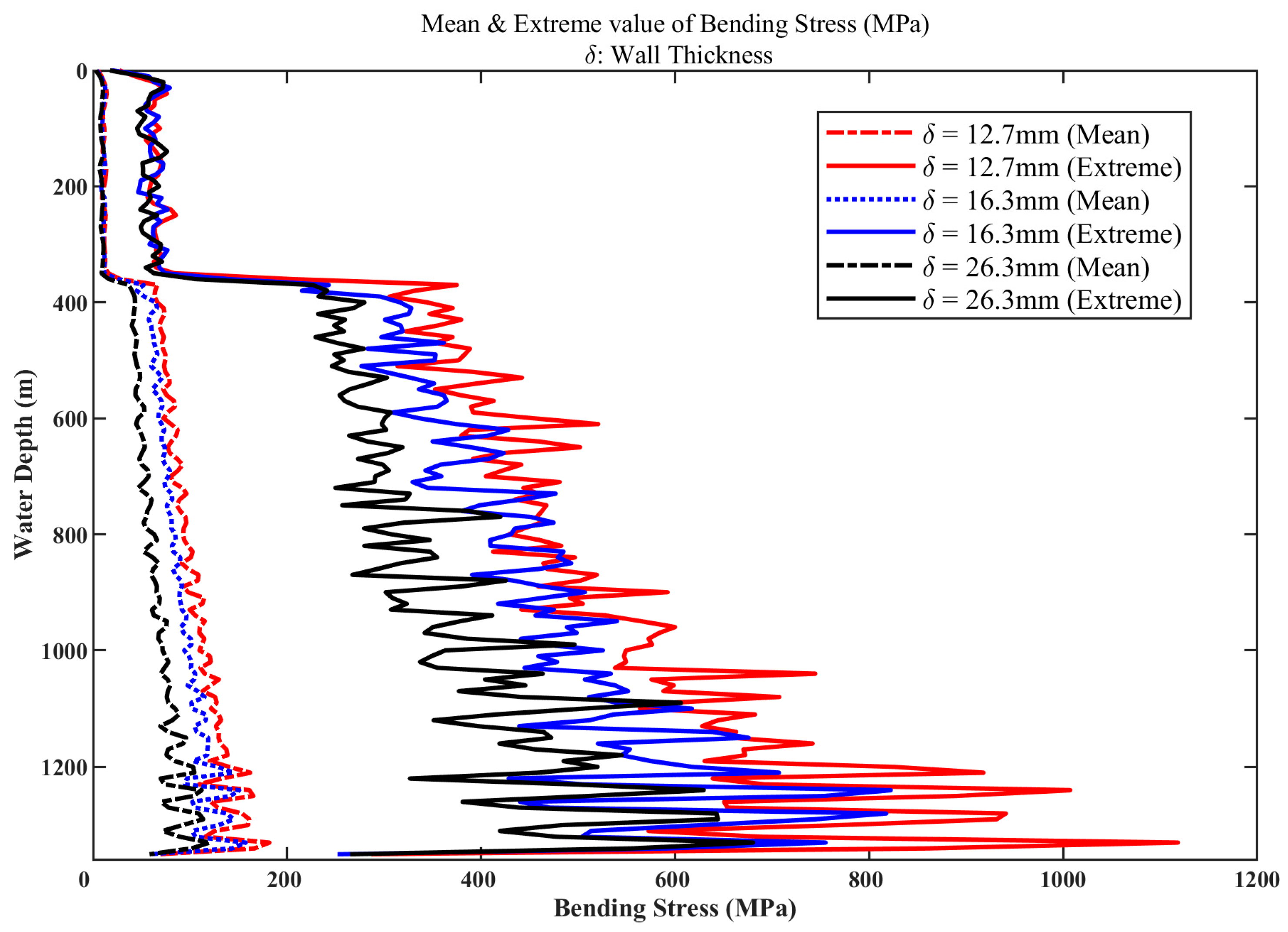
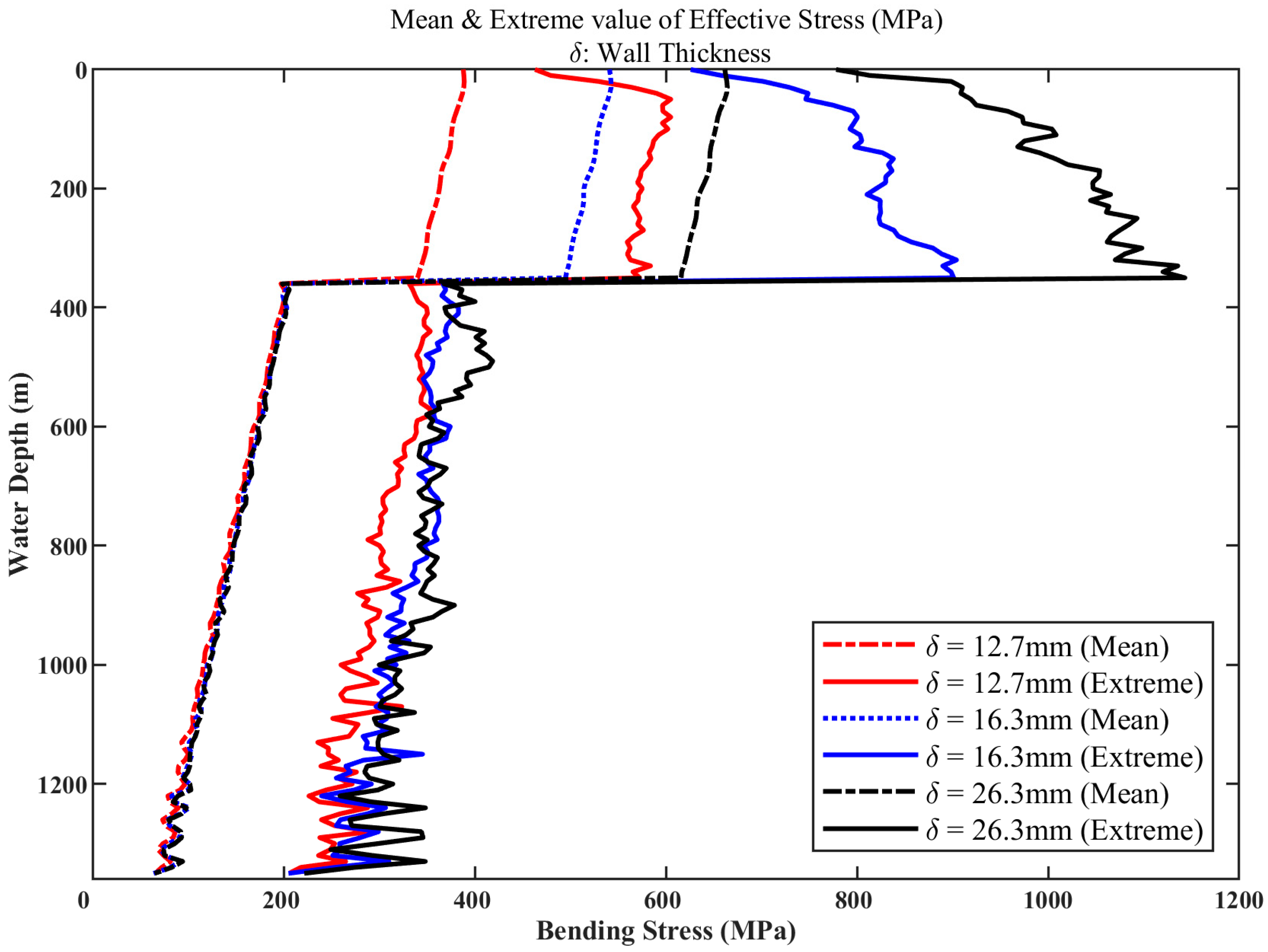
5.5.1. Effect of Wall Thickness
- (1)
- Comparison of axial tensile stress
- (2)
- Comparison of bending stress
- (3)
- Comparison of effect stress
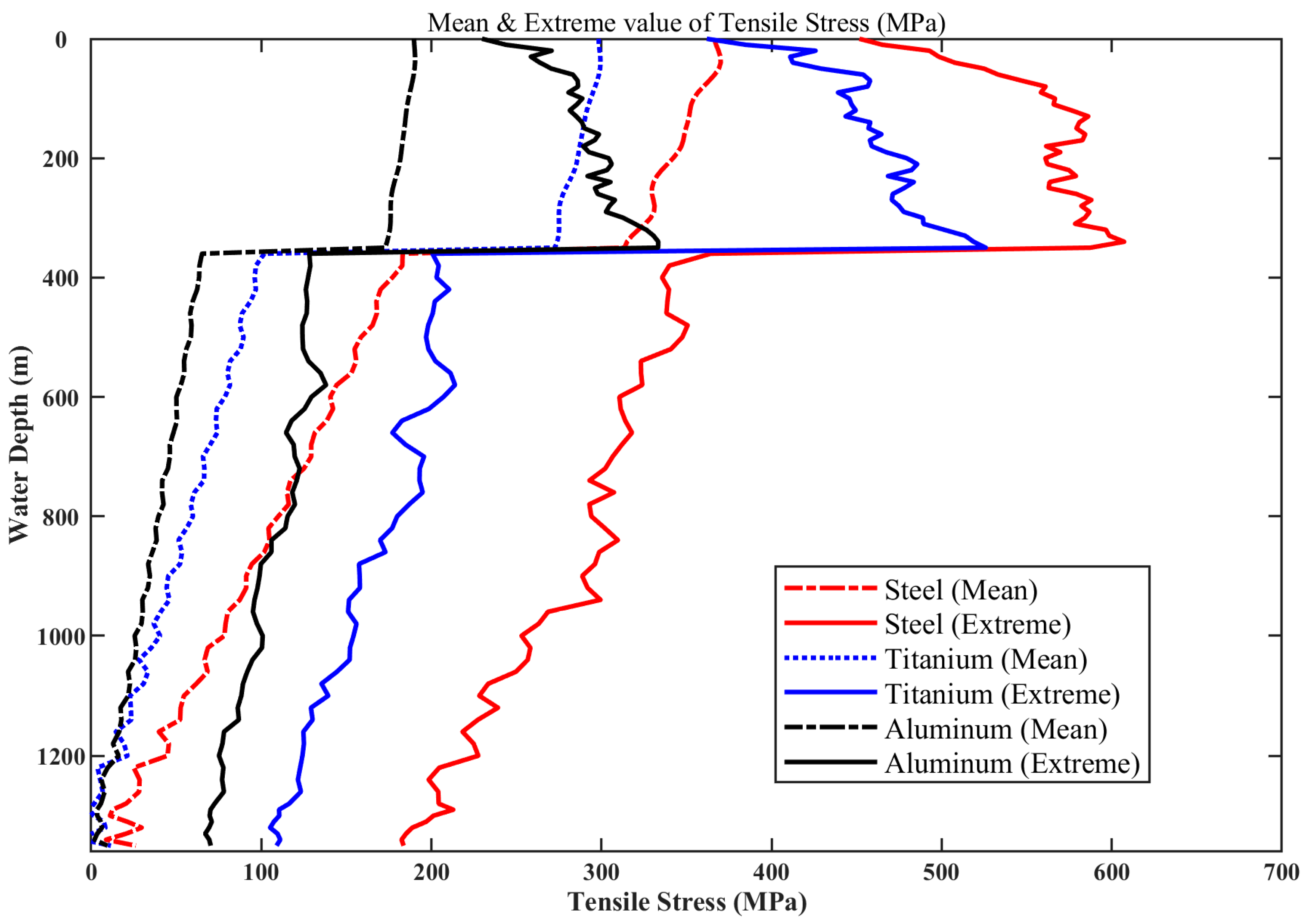
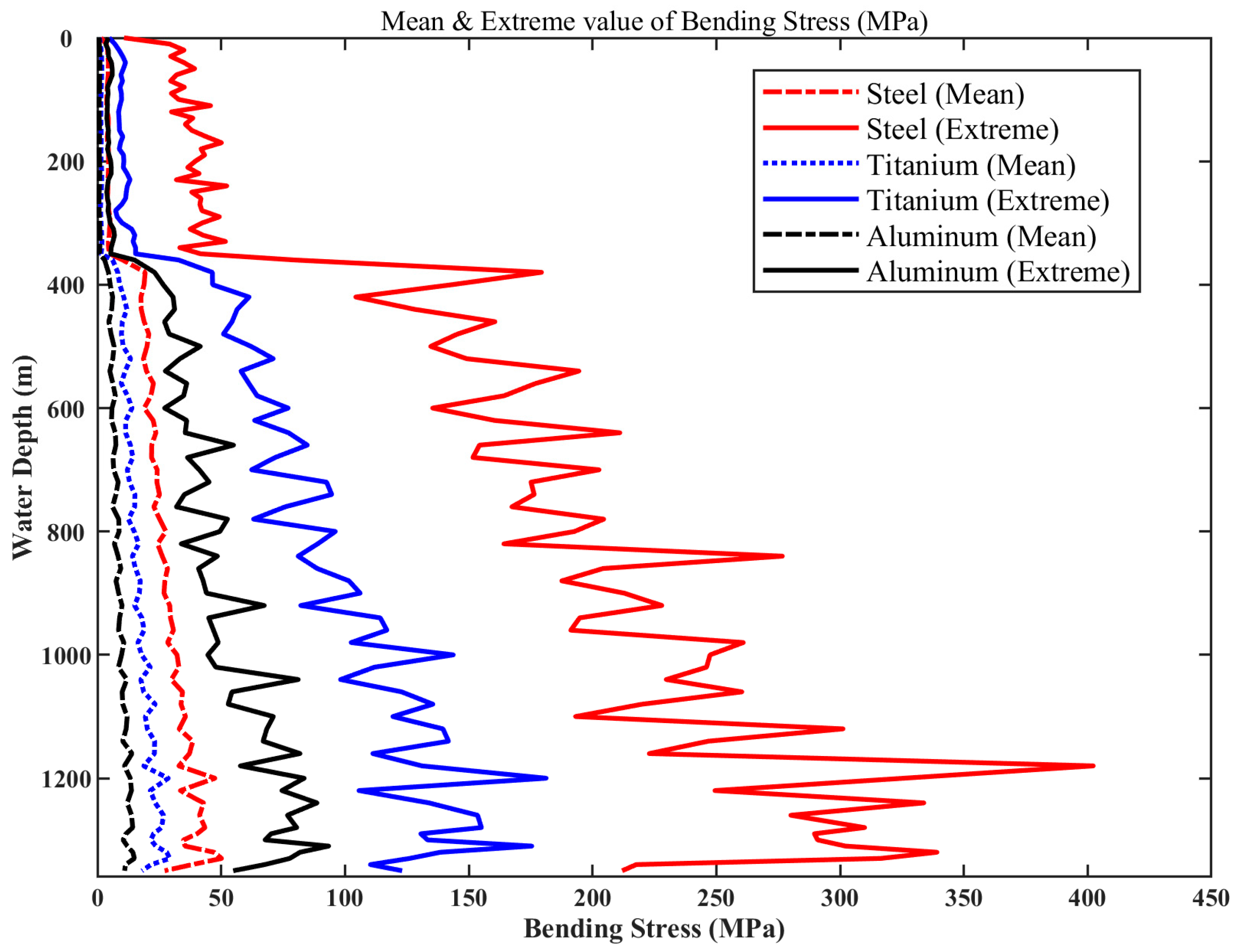
5.5.2. Effect of Pipe String Material
- (1)
- Comparison of tensile stress
- (2)
- Comparison of bending stress
- (3)
- Comparison of effective stress
6. Conclusions
- (1)
- During drilling operations, the axial tensile stress, bending stress, and effective stress of the casing drilling assembly fluctuate continuously. The landing string experiences significant fluctuations in axial tensile and effective stresses but minor fluctuations in bending stress, whereas the casing exhibits relatively smaller axial stress fluctuations and greater bending stress variations.
- (2)
- Both mean and extreme values of axial tensile and effective stresses in the landing string significantly exceed those in the casing. For the landing string, the mean stress decreases from top to bottom while the stress fluctuation amplitude increases along the same direction, resulting in higher extreme stresses at the lower section. Conversely, both mean and extreme stresses in the casing progressively decrease from top to bottom, identifying the bottom end of the landing string as the critical structural location.
- (3)
- The bending stress in the landing string is relatively small, with negligible axial variation. In contrast, the casing experiences greater bending stresses, significant fluctuation amplitudes, and increasing stresses towards the bottom of the assembly.
- (4)
- Increasing the wall thickness of the landing string and employing low-density pipe materials can effectively reduce operational stresses. However, using low-density materials demonstrates a more pronounced effect.
- Platform motion, induced by wind, wave, and current interactions, was not explicitly considered. Although heave compensators and mooring systems mitigate these effects, resonance conditions at platform frequencies could significantly influence drillstring dynamics, thus requiring further attention.
- The model did not include the effects of the mass eccentricity of the drilling assembly, which causes centrifugal forces and whirl motions during drilling operations. Future analyses incorporating the mass eccentricity of the drilling assembly are necessary for a more accurate representation.
- The drill bit-rock interaction was simplified to a sinusoidal force without considering its inherent randomness, necessitating future research incorporating stochastic bit-rock interactions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shepard, S.F.; Reiley, R.H.; Warren, T.M. Casing drilling: An emerging technology. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 27 February–1 March 2001; Society of Petroleum Engineers: Calgary, AB, Canada, 2001. [Google Scholar]
- Karimi, M.; Petrie, S.W.; Moellendick, E.; Holt, C. A Review of Casing Drilling Advantages to Reduce Lost Circulation, Augment Wellbore Strengthening, Improve Wellbore Stability, and Mitigate Drilling-induced Formation Damage. In Proceedings of the SPE/IADC Middle East Drilling Technology Conference and Exhibition, Muscat, Oman, 24–26 October 2011; Society of Petroleum Engineers: Calgary, AB, Canada, 2011. [Google Scholar]
- Yang, B.; Liao, R.; Zhang, J. Research and Application of Smear Effect in Casing Drilling Technology. China Pet. Mach. 2014, 42, 15–18. [Google Scholar]
- Kumar, A.; Samuel, R. Analytical Model to Characterize “Smear Effect” Observed While Drilling with Casing. J. Energy Resour. Technol. 2014, 136, 33101. [Google Scholar] [CrossRef]
- Wicaksono, N.T.; Falhum, H.M.; Subagio, A.; Ritamawan, R.; Pratomo, A.I.; Saragih, A.M.S.; Nasution, H.A.; Malik, M.A.; Budiono, K.; Mardiana, R.Y.; et al. Casing While Drilling Level 2 as Mitigation for Shallow Gas and Loss Circulation Hazards. In Proceedings of the Surface Section: SPE/IATMI Asia Pacific Oil & Gas Conference and Exhibition, Virtual, 12–14 October 2021. [Google Scholar]
- Rosenberg, S.; Kotow, K.; Wakefield, J.; Sampietro, S.; Hulett, B. Riserless Casing Drilling for Mitigation of Shallow Hazards—A Paradigm Shift in Deepwater Well Construction. In Proceedings of the IADC/SPE International Drilling Conference and Exhibition, Galveston, TX, USA, 8–10 March 2022. [Google Scholar]
- Kotow, K.J. Riserless Drilling-With-Casing: Deepwater Casing Seat Optimization. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dallas, TX, USA, 24–26 September 2018; Society of Petroleum Engineers: Calgary, AB, Canada, 2010. [Google Scholar]
- Kotow, K.J.; Pritchard, D.M. Riserless Drilling with Casing: A New Paradigm for Deepwater Well Design. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 4–7 May 2009; Offshore Technology Conference: Houston, TX, USA, 2009. [Google Scholar]
- Nunzi, P.; Molaschi, C.; Beattie, S.; Feasey, G.F.; Odell, A.C.; Twardowski, E.M. Drive down Costs at Surface: Eliminate Contingency Strings in Deepwater. In Proceedings of the SPE Deepwater Drilling and Completions Conference, Galveston, TX, USA, 5–6 October 2010; Society of Petroleum Engineers: Calgary, AB, Canada, 2010. [Google Scholar]
- Dou, Y.; Miska, S.; Cao, Y. An Experimental Study of Whirling Motion and the Relationship between Torque and Rotary Speed for Simulated Casing Drilling. Chem. Technol. Fuels Oils 2020, 56, 285–299. [Google Scholar] [CrossRef]
- Graham, R.D. Forced Lateral Motion of Deep-Water Drill Strings. Master’s Thesis, Rice University, Houston, TX, USA, 1963. [Google Scholar]
- Graham, R.D.; Frost, M.A.; Wilhoit, J.C. Analysis of the Motion of Deep-Water Drill Strings—Part 1: Forced Lateral Motion. J. Eng. Ind. 1965, 87, 137–144. [Google Scholar] [CrossRef]
- Frost, M.A.; Wilhoit, J.C. Analysis of the Motion of Deep-Water Drill Strings—Part 2: Forced Rolling Motion. J. Eng. Ind. 1965, 87, 145–149. [Google Scholar] [CrossRef]
- Rheem, C.; Kato, K. A basic research on the VIV response of rotating circular cylinder in flow. Int. Conf. Offshore Mech. Arct. Eng. 2011, 44397, 431–436. [Google Scholar]
- Samuel, R. Modeling and Analysis of Drillstring Vibration in Riserless Environment. J. Energy Resour. Technol. 2013, 135, 013101. [Google Scholar] [CrossRef]
- Obadina, A. Hydrodynamic Analysis of Drill String in Open Water. Master’s Thesis, University of Stavanger, Stavanger, Norway, 2013. [Google Scholar]
- KSu, H.; Wan, W.; Liu, J.L. Effect of deepwater drilling platform movement on drilling string in riserless environment. Sci. Technol. Eng. 2013, 13, 1734–1739. [Google Scholar]
- Inoue, T.; Suzuki, H.; Tar, T.; Senga, H.; Wada, K.; Matsuo, M.Y. Numerical Simulation of Motion of Rotating Drill Pipe due to Magnus Effect in Riserless Drilling. Int. Conf. Offshore Mech. Arct. Eng. 2017, 57762, V8T–V11T. [Google Scholar]
- Wada, R.; Kaneko, T.; Ozaki, M.; Inoue, T.; Senga, H. Longitudinal natural vibration of ultra-long drill string during offshore drilling. Ocean Eng. 2018, 156, 1–13. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, J.; Cai, M. Three-dimensional nonlinear coupling vibration of drill string in deepwater riserless drilling and its influence on wellbore pressure field. Nonlinear Dyn. 2023, 111, 14639–14666. [Google Scholar] [CrossRef]
- Wang, Y.; Lou, M.; Wang, Y.; Fan, C.; Tian, C.; Qi, X. Experimental investigation of the effect of rotation rate and current speed on the dynamic response of riserless rotating drill string. Ocean Eng. 2023, 280, 114542. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, J. Dynamics of Structure; Water & Power Press: Beijing, China, 2012; pp. 20–22. [Google Scholar]
- Feng, Y. A First Course in Continuum Mechanics; Tsinghua University Press: Beijing, China, 2009; pp. 87–91. [Google Scholar]
- Paı, M.P.; Luu, T.P.; Prabhakar, S. Dynamics of a long tubular cantilever conveying fluid downwards, which then flows upwards around the cantilever as a confined annular flow. J. Fluids Struct. 2008, 24, 111–128. [Google Scholar]
- Lopes, J.-L.; Païdoussis, M.; Semler, C. Linear and nonlinear dynamics of cantilevered cylinders in axial flow. Part 2: The equations of motion. J. Fluids Struct. 2002, 16, 715–737. [Google Scholar] [CrossRef]
- Païdoussis, M.; Grinevich, E.; Adamovic, D.; Semler, C. Linear and nonlinear dynamics of cantilevered cylinders in axial flow. Part 1: Physical dynamics. J. Fluids Struct. 2002, 16, 691–713. [Google Scholar] [CrossRef]
- Xing, X.; Yan, W.; Deng, J.; Zhang, C. Influences of Deepwater Current Velocity Profile on Transverse Load on Marine Riser. Pet. Eng. Constr. 2012, 38, 8–10. [Google Scholar]
- Wang, S.; Liang, B. Wave Mechanics for Ocean Engineering; China Ocean University Press: Tsingtao, China, 2013; pp. 109–115. [Google Scholar]
- Veritas, N. Environmental Conditions and Environmental Loads; Det Norske Veritas Oslo: Høvik, Norway, 2000; pp. 89–90. [Google Scholar]
- Clough, R.W.; Penzien, J. Dynamics of Structures; Computers and Structures: Berkeley, CA, USA, 2003. [Google Scholar]
- Amjadi, A.H.; Johari, A. Stochastic nonlinear ground response analysis considering existing boreholes locations by the geostatistical method. Bull. Earthq. Eng. 2022, 20, 2285–2327. [Google Scholar] [CrossRef]
- Johari, A.; Amjadi, A.H.; Heidari, A. Stochastic nonlinear ground response analysis: A case study site in Shiraz, Iran. Sci. Iran. 2021, 28, 2070–2086. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Property | Landing String | Casing |
|---|---|---|
| Outer diameter (mm) | 168.3 | 508 |
| Inner diameter (mm) | 135.8 | 476.25 |
| Wall thickness (mm) | 16.25 | 15.875 |
| Cross-sectional area (mm2) | 7762 | 24,544 |
| Line weight (N·m−1) | 718.13 | 1888.2 |
| Length (m) | 352 | 1320 |
| Material property | S-135 | X56 |
| Tensile strength (kN) | 7221.4 | 9600 |
| Bending stiffness (N·m2) | 4,764,574.4 | 1,532,211.8 |
| Yield strength (Mpa) | 930.7 | 390 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Cheng, G.; Zhou, S.; Shi, W.; Wang, J. Stochastic and Nonlinear Dynamic Response of Drillstrings in Deepwater Riserless Casing Drilling Operation. J. Mar. Sci. Eng. 2025, 13, 876. https://doi.org/10.3390/jmse13050876
Li H, Cheng G, Zhou S, Shi W, Wang J. Stochastic and Nonlinear Dynamic Response of Drillstrings in Deepwater Riserless Casing Drilling Operation. Journal of Marine Science and Engineering. 2025; 13(5):876. https://doi.org/10.3390/jmse13050876
Chicago/Turabian StyleLi, He, Guodong Cheng, Shiming Zhou, Wenyang Shi, and Jieli Wang. 2025. "Stochastic and Nonlinear Dynamic Response of Drillstrings in Deepwater Riserless Casing Drilling Operation" Journal of Marine Science and Engineering 13, no. 5: 876. https://doi.org/10.3390/jmse13050876
APA StyleLi, H., Cheng, G., Zhou, S., Shi, W., & Wang, J. (2025). Stochastic and Nonlinear Dynamic Response of Drillstrings in Deepwater Riserless Casing Drilling Operation. Journal of Marine Science and Engineering, 13(5), 876. https://doi.org/10.3390/jmse13050876