
Study on the Dynamic Characteristics of Floating Production Storage and Offloading Units and Steel Catenary Risers Under the Action of Internal Solitary Waves



Abstract
1. Introduction
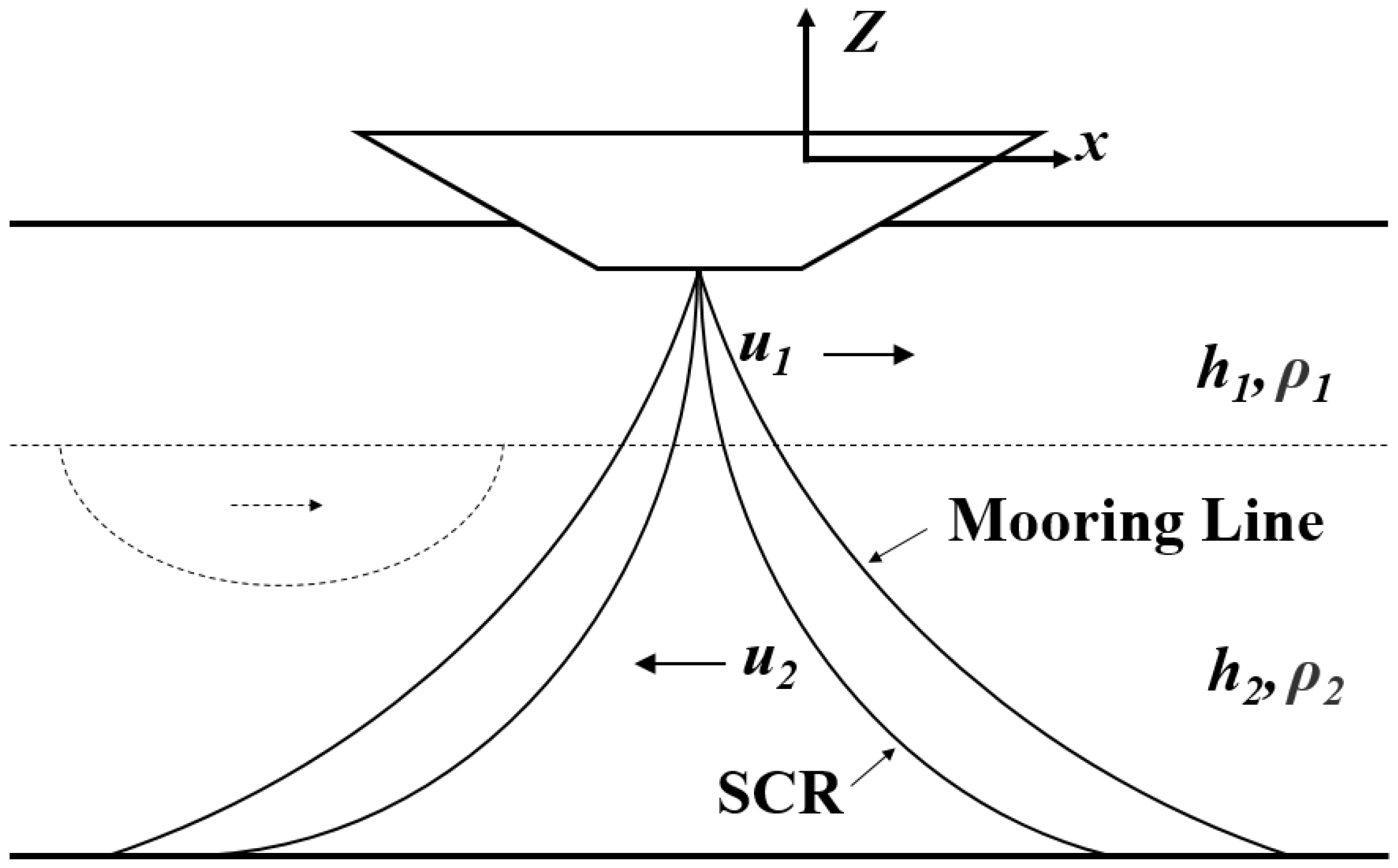
2. Model Description
2.1. Internal Solitary Wave Equation
2.2. Equation of the FPSO Motion
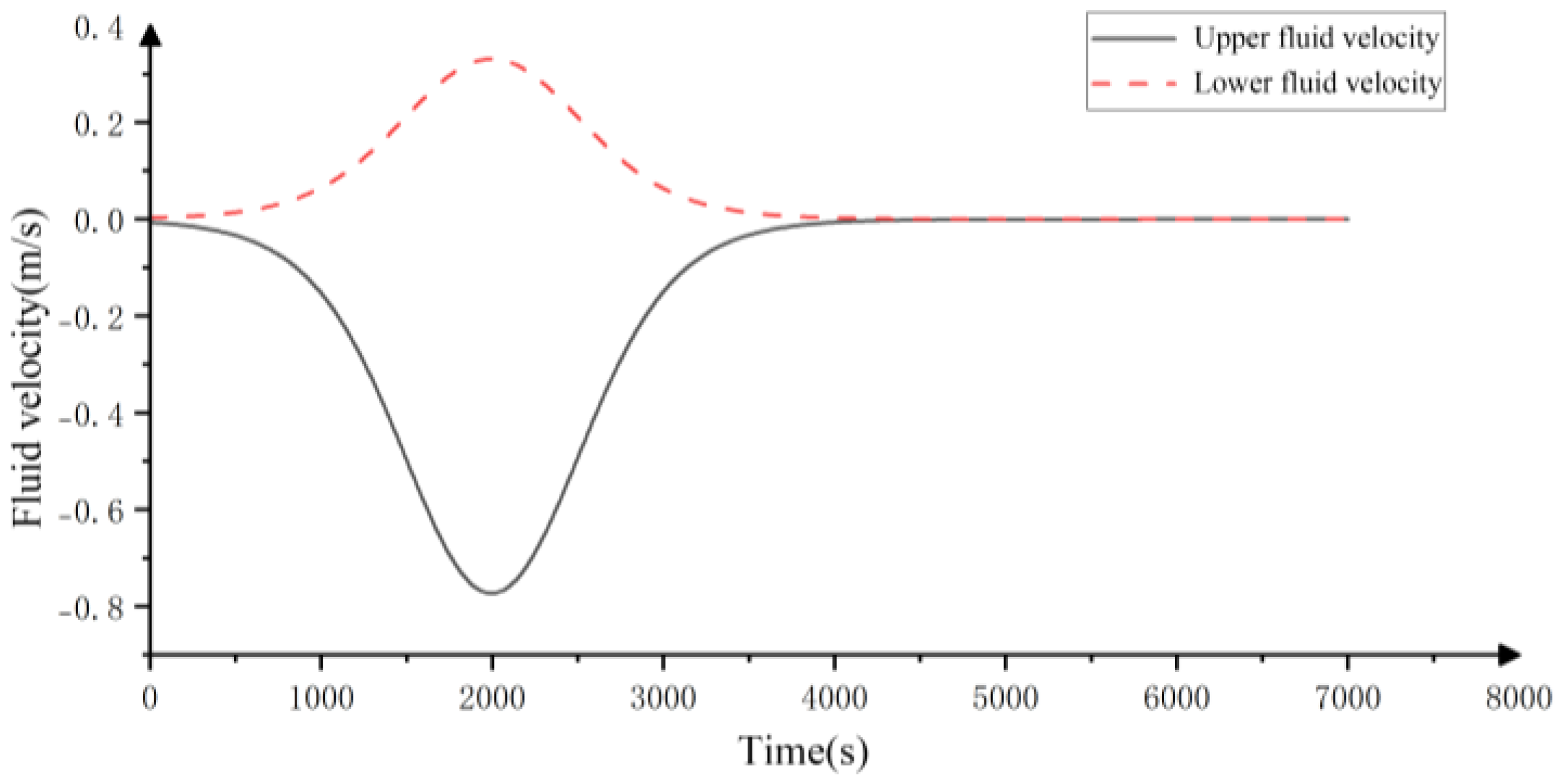
2.2.1. Dragging Force of the ISW
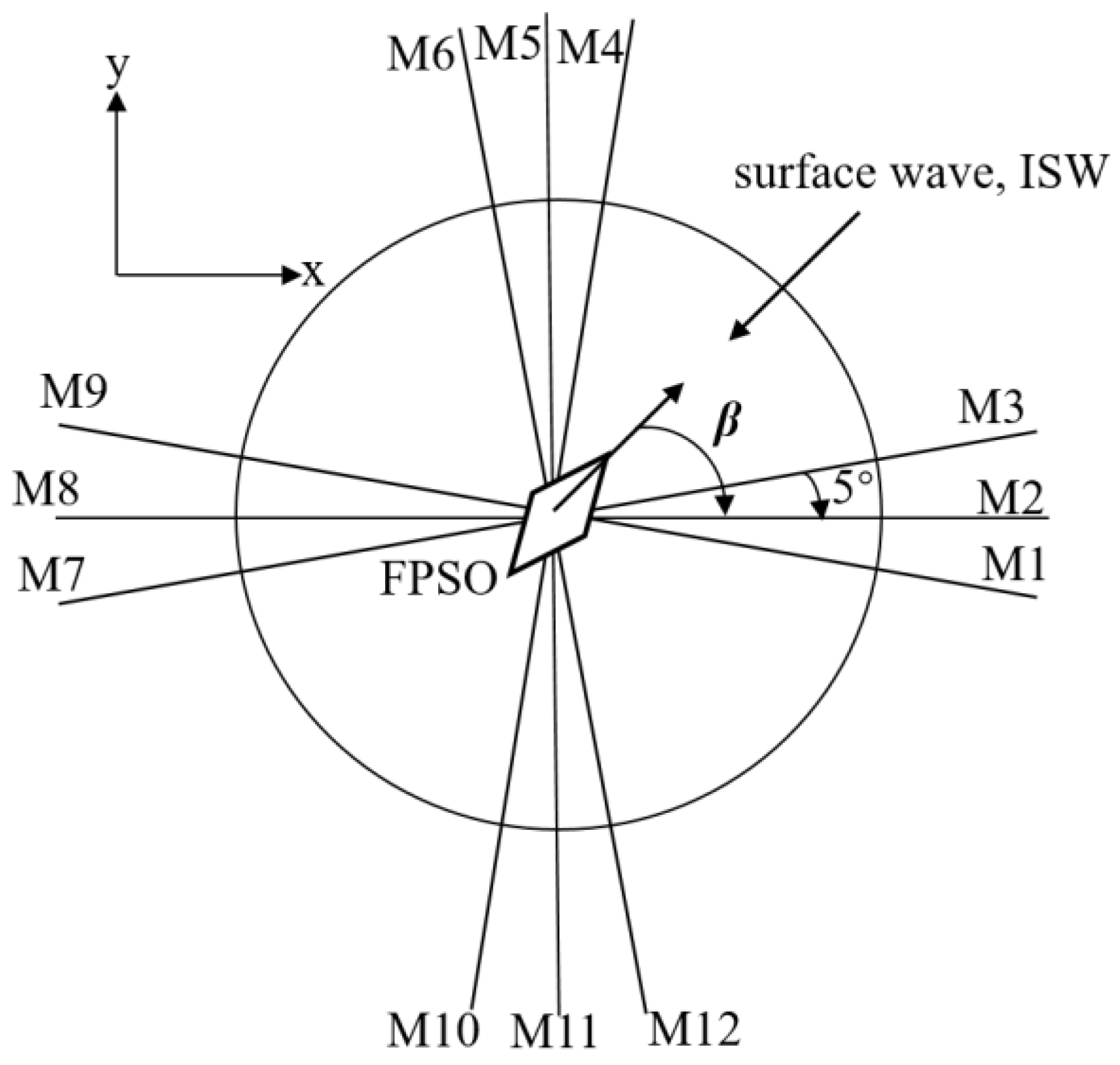
2.2.2. Restoring Force of the Mooring System
- (1)
- The initial vertical pre-tension V0 can be calculated based on H0 and θ0. At this point, the middle wire part of the cable is assumed to be completely floating. The vertical force Vj and angle θt at the connection between the wire and the top anchor chain can be calculated.
- (2)
- According to the calculated Vj and θt, the vertical heights Y1, Y2 and Y3 of the three cable segments can be solved.
- (3)
- The solved Y1 + Y2 + Y3 is compared with the height h. If the error meets the set threshold, the next step can be taken. If not, Vj can be reasonably increased or decreased based on the positive or negative value and magnitude of the difference, and the above steps can be repeated until the difference between Y1 + Y2 + Y3 and the h meets the threshold.
- (4)
- Then X0, X1, X2, X3 can be calculated, where X0 is the length of the bottom support section.
- (5)
- After obtaining the initial conditions for the mooring line, the relationship between the restoring force and the displacement of the mooring point can be calculated. Firstly, a small uniform displacement du is assumed, and a new value of H can be determined. Then, by repeating steps (2) to (4) with the new value of H, the new X0, X1, X2, X3 values can be calculated.
- (6)
- After obtaining the new values for X0, X1, X2, X3, their sum can be subtracted from the result obtained in step (4), and the difference can be compared with the set threshold. If it meets the requirement, the following steps can be performed. If it does not meet the requirement, H can be slightly adjusted by the difference, and step (5) can be repeated until the difference meets the threshold.
2.3. FEM Model of the Coupled FPSO–SCR System
3. Results and Discussion
3.1. FPSO Motion Response and Influence of Mooring Pre-Tension on FPSO Motion
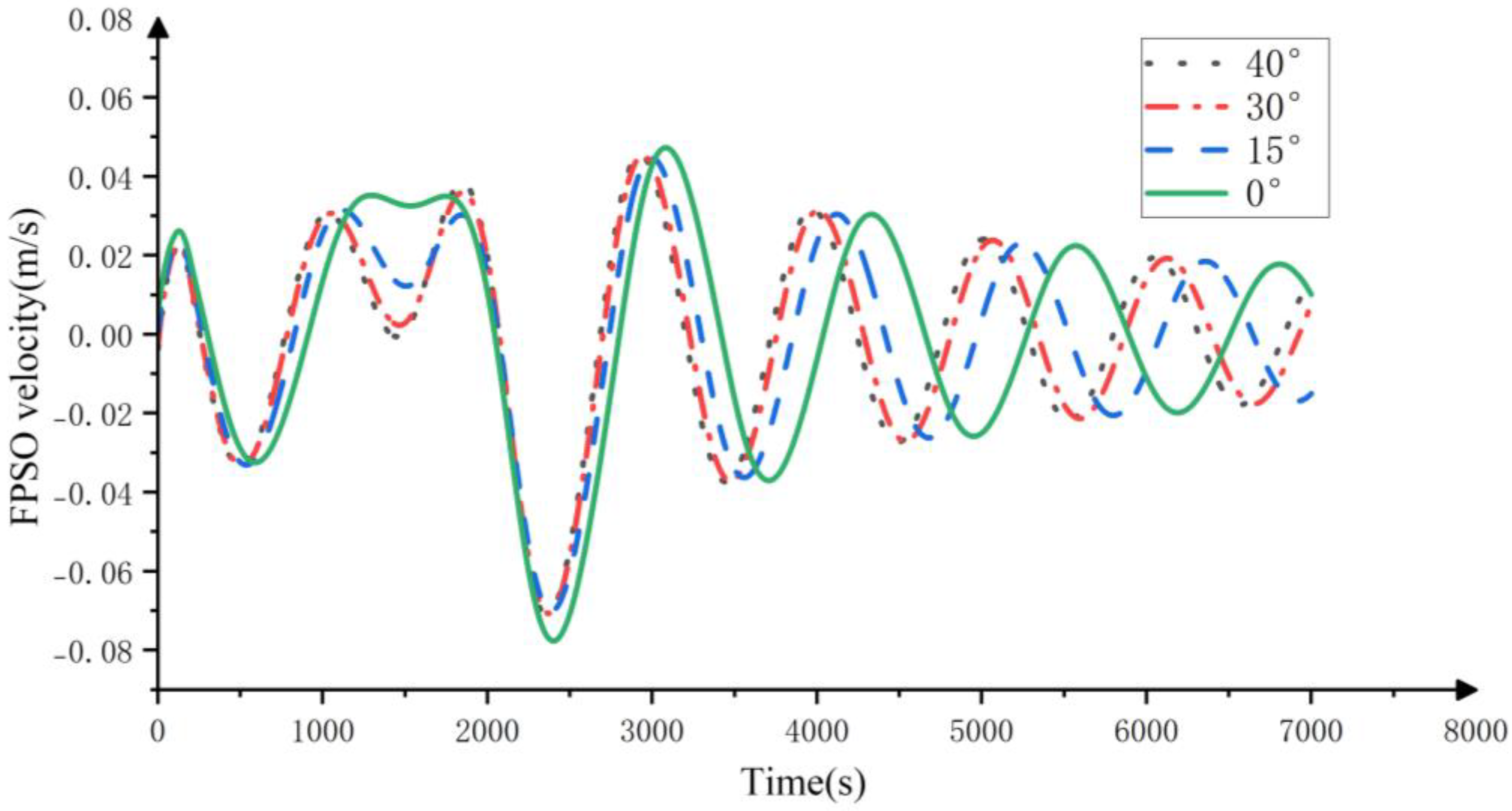
3.2. Influence of Mooring Line Distribution on FPSO Motion
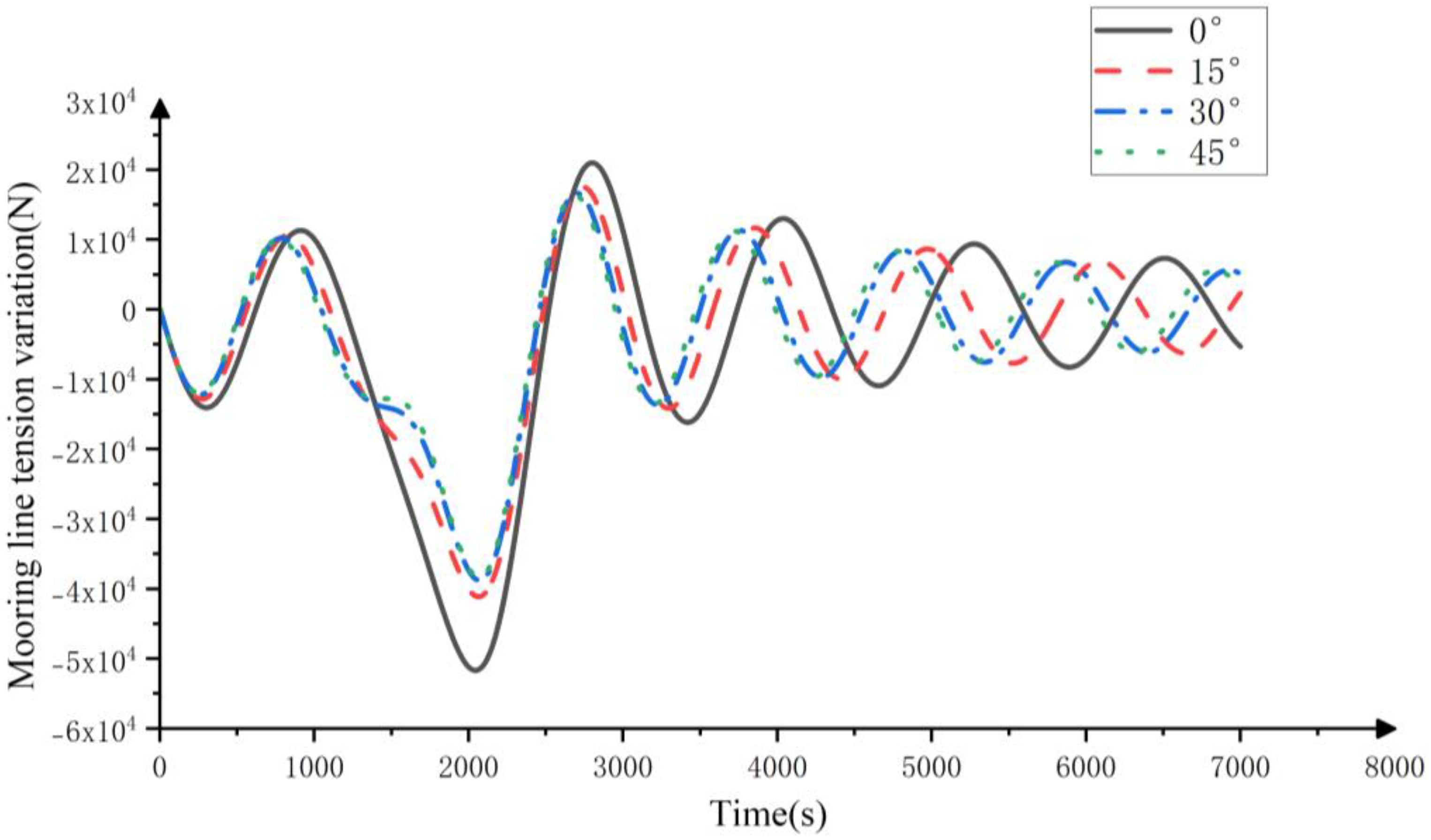
3.3. Tension Characteristics of Mooring Lines
3.4. Influence of FPSO Motion on SCR Dynamic Response
3.5. Influence of ISW Incident Angle on SCR Dynamic Response
4. Conclusions
- (1)
- The velocity of the FPSO under the action of internal solitary waves is generally not large, but its variation is very complex. The internal solitary wave load reaches its maximum value before the ISW crest reaches the FPSO, but the FPSO displacement reaches a maximum when it reaches the FPS, which is consistent with the actual situation.
- (2)
- The smaller the horizontal pre-tension of the mooring cable, the greater the displacement of the FPSO, and the more time needed for the FPSO displacement to decay. The arrangement of mooring lines also has a significant impact on the FPSO. For symmetrically arranged mooring systems, the larger the angle between the internal solitary waves and the mooring lines, the smaller the horizontal displacement of the FPSO.
- (3)
- Considering both the motion of the FPSO and the internal solitary waves, the stress of the SRC reaches its maximum value when the FPSO reaches its maximum motion, while it reaches its minimum value when the FPSO reaches its minimum motion.
- (4)
- When the ISW crest reaches the FPSO, the stress values of the SCR at the four incident angles of 0°, 30°, 60°, and 90° all reach their maximum. As the incident angle increases, the stress value of the SCR slightly decreases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, Y.D.; Lin, J.; Chen, X. Application of fluctuations in the sound field in inversion of internal solitary wave phase speed. Ocean Eng. 2024, 305, 117878. [Google Scholar] [CrossRef]
- Li, R.J.; Li, M. Generation and evolution of internal solitary waves in a coastal plain estuary. J. Phys. Oceanogr. 2024, 54, 641–652. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, C.; Guo, B.B.; Liang, Q.Y.; Xie, Z.L.; Yuan, Z.M.; Chen, X.P.; Hu, H.B.; Du, P. Numerical investigation on the interaction between large-scale continuously stratified internal solitary wave and moving submersible. Appl. Ocean Res. 2024, 145, 103938. [Google Scholar] [CrossRef]
- Zhang, X.D.; Li, X.F. Unveiling three-dimensional sea surface signatures caused by internal solitary waves: Insights from the surface water ocean topography mission. J. Oceanol. Limnol. 2024, 42, 709–714. [Google Scholar] [CrossRef]
- Sun, H.W.; You, Y.X.; Lei, J.R. Deflection and drag on flexible marine structures in steady currents and internal solitary waves. Phys. Fluids 2024, 36, 106603. [Google Scholar] [CrossRef]
- Yu, J.X.; Liu, X.W.; Sun, B.; Yu, Y.; Wu, S.B.; Li, Z.M. Nonlinear dynamic response of touchdown zone for steel catenary riser under multiple internal solitary waves. Ocean Eng. 2024, 297, 117141. [Google Scholar] [CrossRef]
- Guo, Y.L.; Li, Q.; Chen, X.; Peng, J.H.; He, X. Dynamic analysis on the interaction of two successive internal solitary waves with a ridge. Phys. Fluids 2024, 36, 066612. [Google Scholar] [CrossRef]
- Adim, M.; Bianchini, R.; Duchene, V. Relaxing the sharp density stratification and columnar motion assumptions in layered shallow water systems. Comptes Rendus Math. 2024, 362, 1597–1626. [Google Scholar] [CrossRef]
- Qiu, N.; Liu, X.Q.; Liu, Z.W.; Li, Y.W.; Hu, P.J.; Chang, Y.J.; Chen, G.M. Mechanical model and characteristics of deep-water drilling riser-wellhead system under internal solitary waves. Mar. Struct. 2023, 90, 103439. [Google Scholar] [CrossRef]
- Lin, Z.H. Numerical study on the forces and moments on a bottom-mounted cylinder by internal solitary wave. J. Fluids Struct. 2023, 121, 103952. [Google Scholar] [CrossRef]
- Makarenko, N.I.; Maltseva, J.L.; Cherevko, A.A. Solitary Waves in a Two-Layer Fluid with Piecewise Exponential Stratification. Fluid Dyn. 2023, 58, 1235–1245. [Google Scholar] [CrossRef]
- Li, Z.X.; Wang, J.; Lu, Y.G.; Huang, S.S.; Yang, Z. Propagation speed model of mode-2 internal solitary waves in the northern South China Sea based on multi-source optical remote sensing. Ocean Eng. 2024, 315, 119850. [Google Scholar] [CrossRef]
- Qiu, N.; Liu, X.Q.; Li, Y.W.; Hu, P.J.; Chang, Y.J.; Chen, G.M.; Meng, H.X. Dynamic catastrophe analysis of deepwater mooring platform/riser/ wellhead coupled system under ISW. Reliab. Eng. Syst. Saf. 2024, 246, 110084. [Google Scholar] [CrossRef]
- Yilmaz, E.U.; Khodad, F.S.; Ozkan, Y.S.; Abazari, R.; Abouelregal, A.E.; Shaayesteh, M.T.; Rezazadeh, H.; Ahmad, H. Manakov model of coupled NLS equation and its optical soliton solutions. J. Ocean Eng. Sci. 2024, 9, 364–372. [Google Scholar] [CrossRef]
- Chang, Z.; Sun, L.N.; Liu, T.F.; Zhang, M.; Liang, K.D.; Meng, J.M.; Wang, J. Experimental study on the variation of optical remote sensing imaging characteristics of internal solitary waves with wind speed. J. Oceanol. Limnol. 2024, 42, 408–420. [Google Scholar] [CrossRef]
- Koop, C.G.; Butler, G. An investigation of internal solitary waves in a two-fluid system. J. Fluid Mech. 1981, 112, 225–251. [Google Scholar] [CrossRef]
- Segur, H.; Hammack, J.L. Soliton models of long internal waves. J. Fluid Mech. 1982, 118, 285–304. [Google Scholar] [CrossRef]
- Michallet, H.; Barthelemy, E. Experimental study of interfacial solitary waves. J. Fluid Mech. 1998, 366, 159–177. [Google Scholar] [CrossRef]
- Grue, J.; Jensen, A.; Russ, P.O.; Sveen, J.K. Properties of large-amplitude internal waves. J. Fluid Mech. 1999, 380, 257–278. [Google Scholar] [CrossRef]
- Brandt, P.; Rubino, A.; Alpers, W.; Backhaus, J.O. Internal waves in the Strait of Messina studied by a numerical model and synthetic aperture radar images from the ERS 1/2 satellites. J. Phys. Oceanogr. 1997, 27, 648–663. [Google Scholar] [CrossRef]
- Huang, W.H.; You, Y.X.; Wang, X.; Hu, T.Q. Experimental study and theoretical model of internal solitary wave generation in finite depth two-layer fluid. Acta Phys. Sin. 2013, 62, 354–367. [Google Scholar] [CrossRef]
- Liu, A.K. Analysis of nonlinear internal waves in the New York Bight. J. Geophys. Res. Ocean. 1988, 93, 12317–12329. [Google Scholar] [CrossRef]
- Cai, S.Q.; Long, X.M.; Gan, Z.J. A method to estimate the forces exerted by internal solitons on cylindrical piles. Ocean Eng. 2003, 30, 673–689. [Google Scholar] [CrossRef]
- Liu, B.T. The Numerical Simulation of the Interaction of Internal Solitary Waves with the Deep-Sea Riser. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2011. [Google Scholar]
- Xu, Z.H. The Interaction Characteristics of Internal Solitary Waves with Floating Production Storage and Offloading System. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2014. [Google Scholar]
- Ren, Y.P.; Tian, H.; Chen, Z.Y.; Xu, G.H.; Liu, L.J.; Li, Y.B. Two kinds of waves causing the resuspension of deep-sea sediments: Excitation and internal solitary waves. J. Ocean Univ. China 2023, 22, 429–440. [Google Scholar] [CrossRef]
- Huang, M.M.; Gao, C.J.; Zhang, N. Numerical research on hydrodynamic characteristics and influence factors of underwater vehicle in internal solitary waves. Int. J. Offshore Polar Eng. 2023, 33, 27–35. [Google Scholar] [CrossRef]
- Zhang, B.B.; Zhang, T.Y.; Duan, W.Y.; Wang, Z.; Guo, X.Y.; Hayatdavoodi, M.; Ertekin, R.C. Internal solitary waves generated by a moving bottom disturbance. J. Fluid Mech. 2023, 963, 32. [Google Scholar] [CrossRef]
- Li, F.H.; Guo, H.Y.; Gu, H.L.; Liu, Z.; Li, X.M. Deformation and stress analysis of the deepwater steel lazy wave riser subjected to internal solitary waves. J. Ocean Univ. China 2023, 22, 377–392. [Google Scholar] [CrossRef]
- Tan, D.L.; Wang, X.; Duan, J.L.; Zhou, J.F. Linear analysis of the dynamic response of a riser subject to internal solitary waves. Appl. Math. Mech.-Engl. Ed. 2023, 44, 1023–1034. [Google Scholar] [CrossRef]
- Wichers, J.E.W.; Devlin, P.V. Effect of coupling of mooring lines and risers on the design values for a turret moored FPSO in deep water of the Gulf of Mexico. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Stavanger, Norway, 17 June 2001. [Google Scholar]
- OCIMF. Prediction of Wind and Current Loads on VLCCs; Oil Companies International Marine Forum: London, UK, 1977. [Google Scholar]
- Zhang, H.J.; Yi, H.R.; Wang, H.; Liang, J.L. The derivation and application of the catenary equation. Technol. Innov. Appl. 2019, 26, 173–176. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Internal Solitary Waves Properties | Depth (m) | Seawater Density (kg/m3) | Wave Amplitude (m) |
|---|---|---|---|
| Upper layer fluid | 274.4 | 1025 | −90.4 |
| Lower layer fluid | 640 | 1028 | −90.4 |
| Main Parameters of the Vessel | Symbol | Value | Unit |
|---|---|---|---|
| Production level | 120,000 | bpd | |
| Storable volume | 14,400 | bbls | |
| Length between perpendiculars | LBP | 310 | m |
| Molded breadth | B | 47.17 | m |
| Molded depth | H | 28.04 | m |
| Draft | T | 18.9 | m |
| Displacement of the vessel | D | 240,869 | mt |
| Center of buoyancy forward of section | FB | 6.6 | m |
| Center of gravity above base | KG | 13.32 | m |
| Name | Value | Unit |
|---|---|---|
| Water depth | 914 | m |
| Pre-tension | 1201 | kN |
| Mooring line quantity | 4*3 | |
| Angle between three mooring lines | 5 | Deg |
| Mooring line length | 2088 | m |
| Chain stopper plate radius | 7 | m |
| First section: ground part | K4 without Block | |
| Length | 914.4 | m |
| Diameter | 88.9 | mm |
| Dry weight | 1617.1 | N/m |
| Wet weight | 1406.9 | N/m |
| Stiffness AE | 794,484 | kN |
| Average breaking load | 6512 | kN |
| Second section: wire rope | Spiral Strand Wire | |
| Length | 1127.8 | m |
| Diameter | 88.9 | mm |
| Dry weight | 412.12 | N/m |
| Wet weight | 349.75 | N/m |
| Stiffness AE | 689,858 | kN |
| Average breaking load | 6418 | kN |
| Third section: top part | K4 without Block | |
| Length | 45.7 | m |
| Diameter | 88.9 | mm |
| Dry weight | 1617.09 | N/m |
| Wet weight | 1406.89 | N/m |
| Stiffness AE | 794,484 | kN |
| Average breaking load | 6512 | kN |
| Number of Grid Nodes | Maximum Stress | Deviation |
|---|---|---|
| 89,543 | 129 MPa | - |
| 203,537 | 138 MPa | 9 MPa |
| 391,352 | 144 MPa | 6 MPa |
| 467,342 | 148 MPa | 4 MPa |
| 503,456 | 149 MPa | 1 MPa |
| Calculated Parameters | Value | Unit |
|---|---|---|
| Water depth | 914.4 | m |
| Angle between the top and the water surface | 60 | ° |
| Outer diameter of riser | 0.4064 | m |
| Inner diameter of riser | 0.3556 | m |
| Poisson’s ratio | 0.3 | |
| Young’s modulus | 2.1 × 105 | MPa |
| Quality density | 7850 | kg/m |
| Total length of pipeline | 2085 | m |
| Dragging section length | 500 | m |
| Horizontal tension | 8220.5 | N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, F.; Li, M.; Mi, Z.; Gao, P. Study on the Dynamic Characteristics of Floating Production Storage and Offloading Units and Steel Catenary Risers Under the Action of Internal Solitary Waves. J. Mar. Sci. Eng. 2025, 13, 521. https://doi.org/10.3390/jmse13030521
Du F, Li M, Mi Z, Gao P. Study on the Dynamic Characteristics of Floating Production Storage and Offloading Units and Steel Catenary Risers Under the Action of Internal Solitary Waves. Journal of Marine Science and Engineering. 2025; 13(3):521. https://doi.org/10.3390/jmse13030521
Chicago/Turabian StyleDu, Fengming, Mingjie Li, Zetian Mi, and Pan Gao. 2025. "Study on the Dynamic Characteristics of Floating Production Storage and Offloading Units and Steel Catenary Risers Under the Action of Internal Solitary Waves" Journal of Marine Science and Engineering 13, no. 3: 521. https://doi.org/10.3390/jmse13030521
APA StyleDu, F., Li, M., Mi, Z., & Gao, P. (2025). Study on the Dynamic Characteristics of Floating Production Storage and Offloading Units and Steel Catenary Risers Under the Action of Internal Solitary Waves. Journal of Marine Science and Engineering, 13(3), 521. https://doi.org/10.3390/jmse13030521