
The Mooring Optimization and Hydrodynamic Characteristics of the Combined Concept of a 15 MW FOWT with WECs




Abstract
1. Introduction
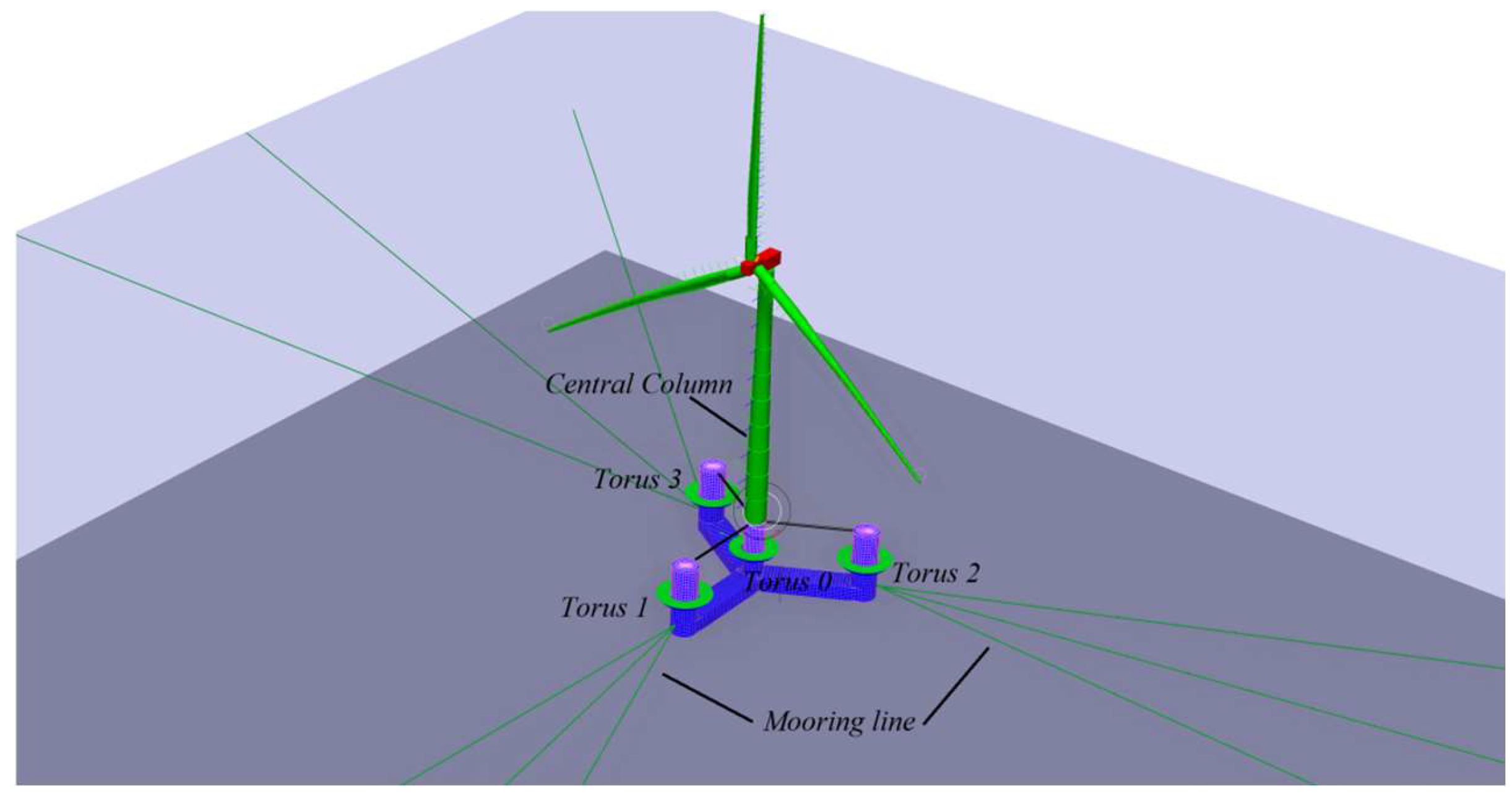
2. The Combined System of the 15 MW FOWT and WECs
2.1. Description
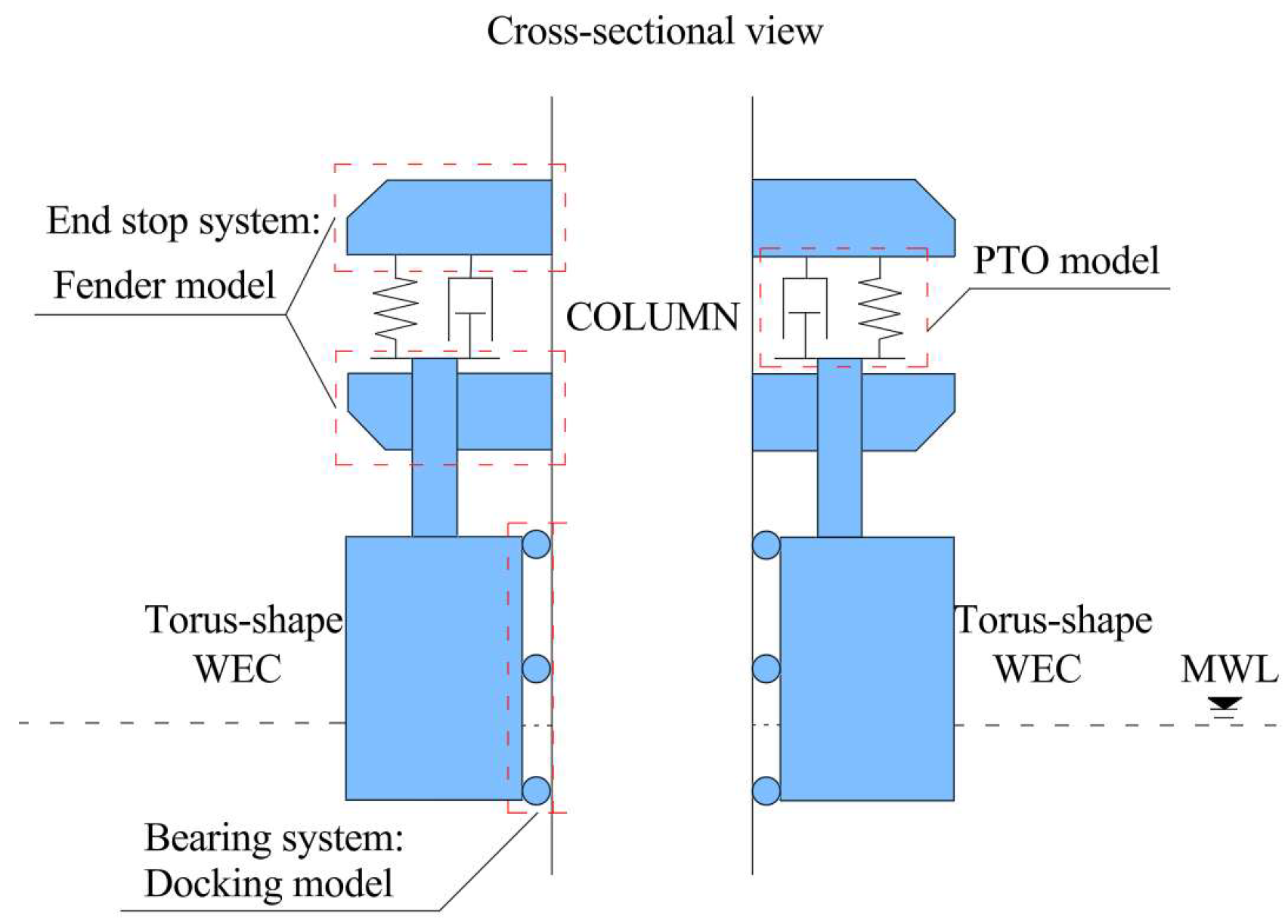
2.2. Numerical Model of the Innovative Combined System
3. The Optimization of the Mooring System
3.1. Initial Mooring System Properties
3.2. Optimization Problem
3.3. Optimization Procedure
4. Results and Discussions
4.1. Dynamic Analysis of the Initial Mooring Configuration
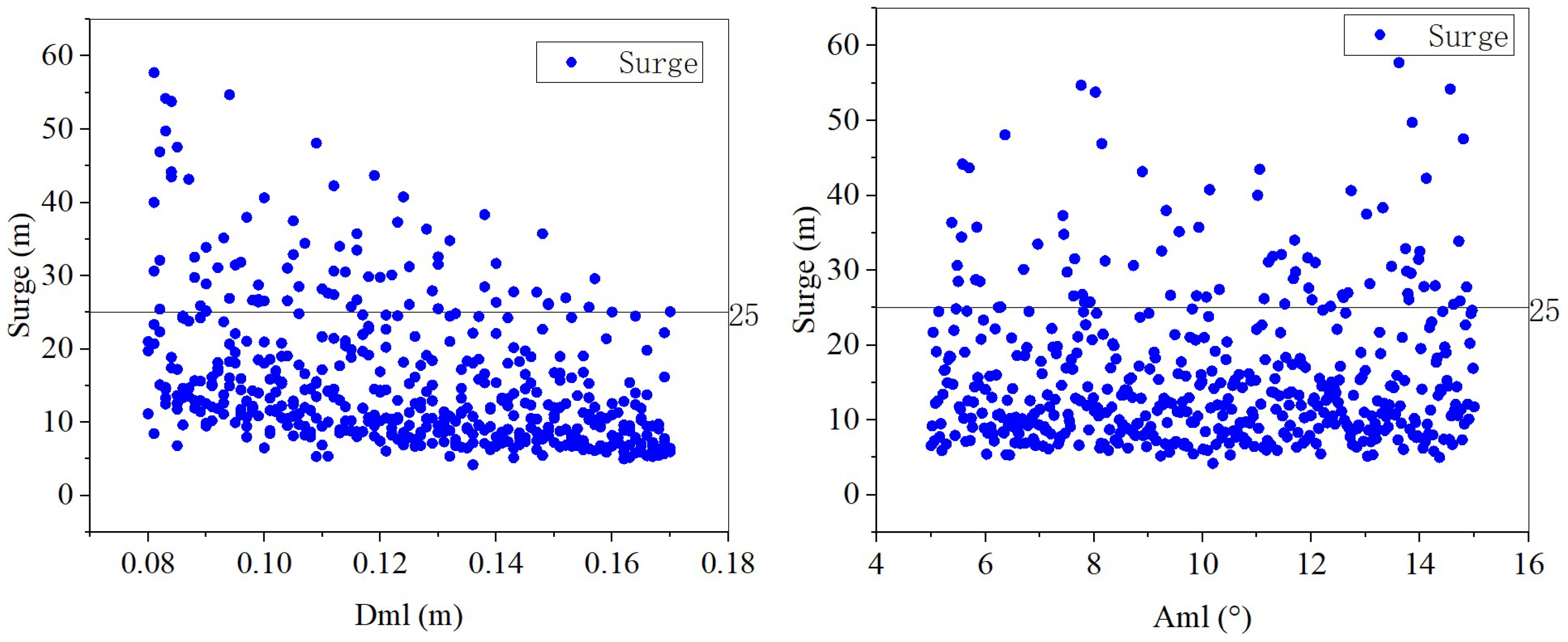
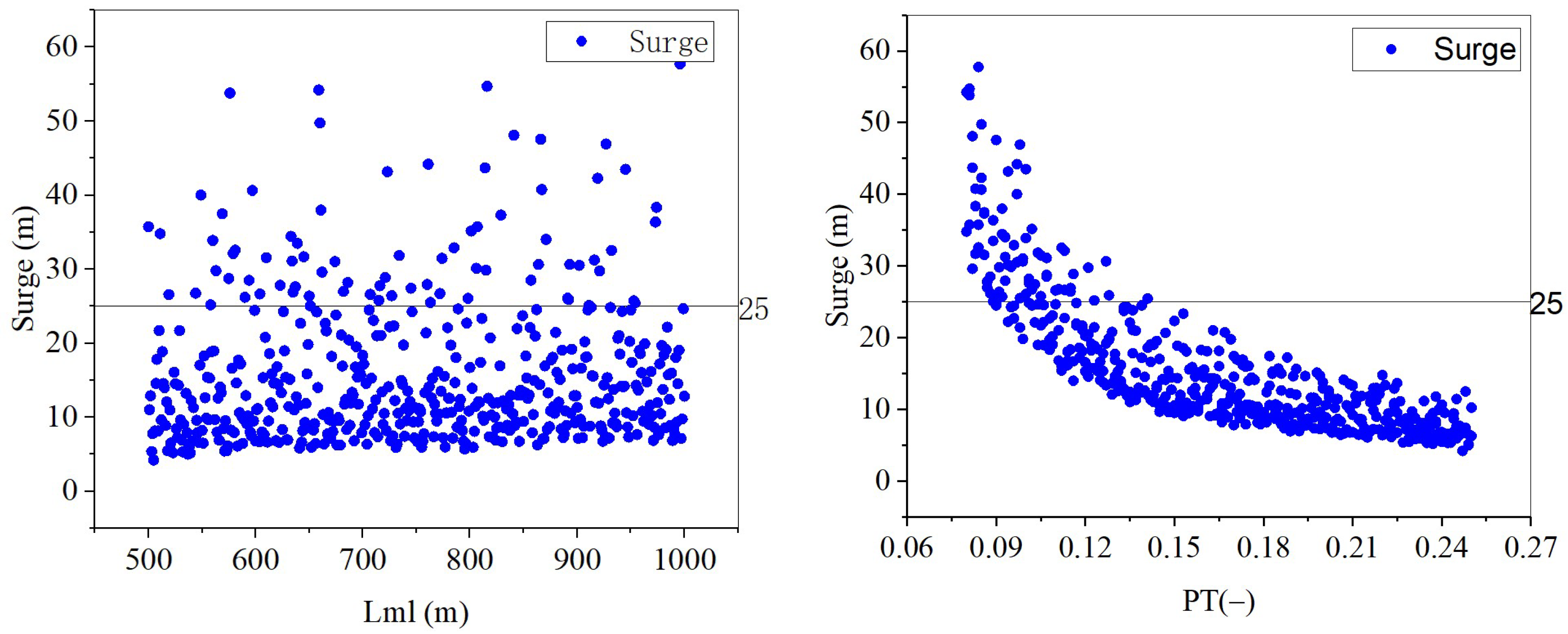
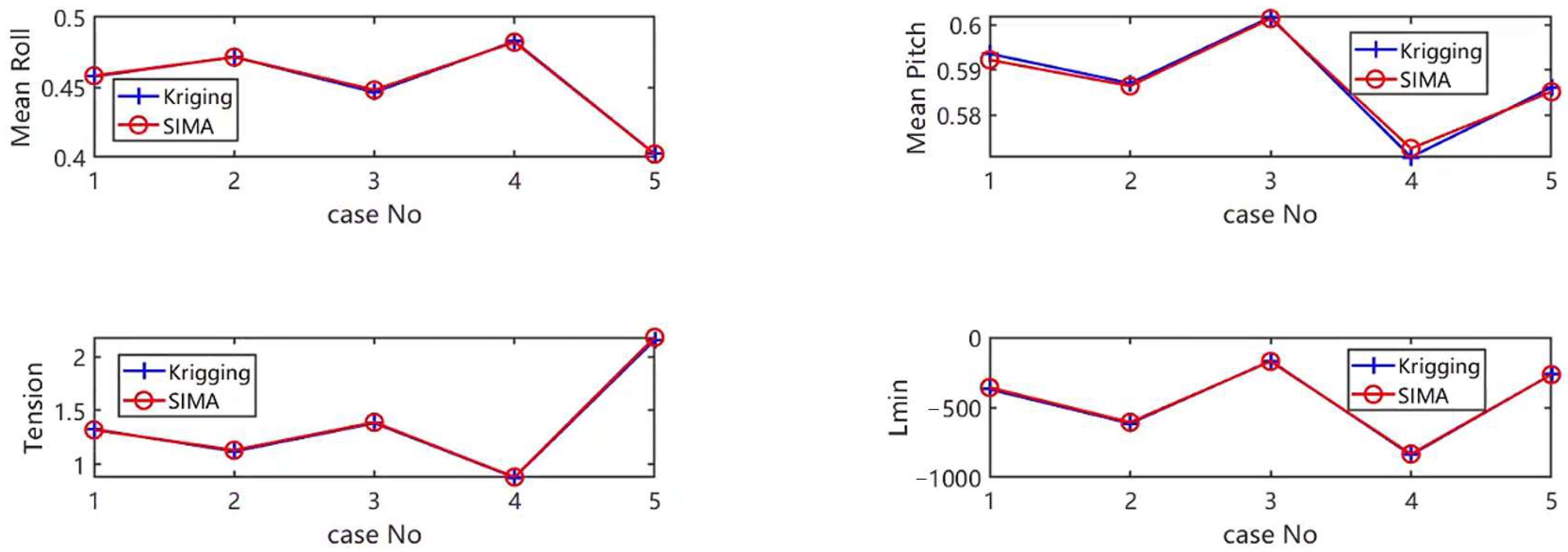
4.2. Latin Hypercube Sampling (LHS) Results and Verification of Kriging Model
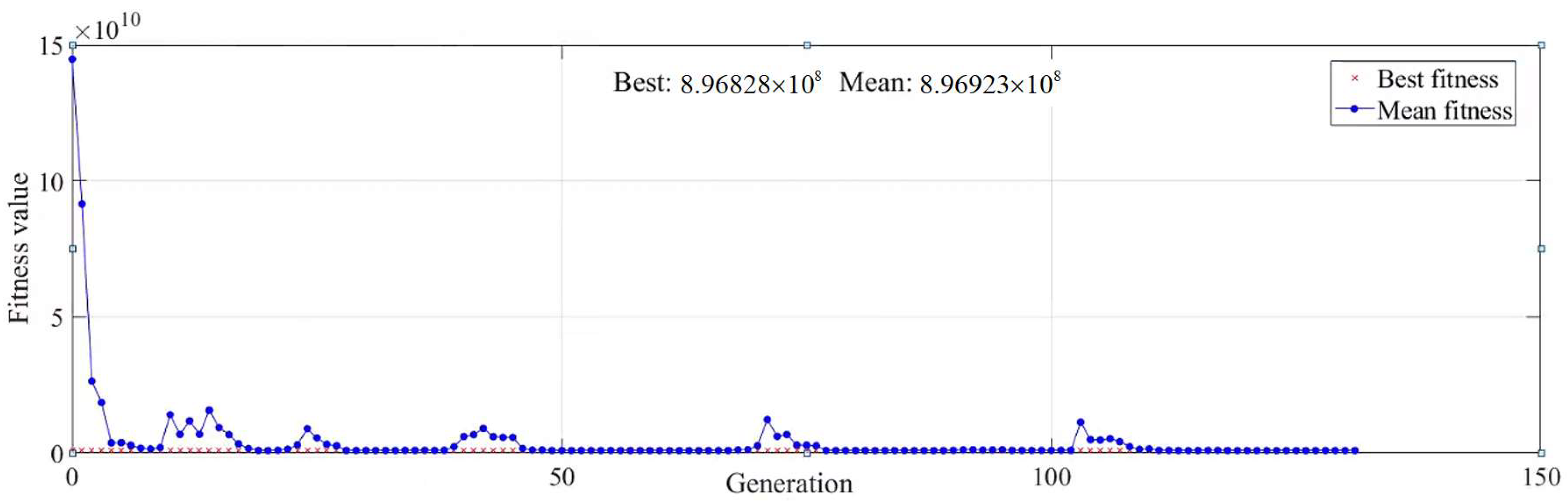
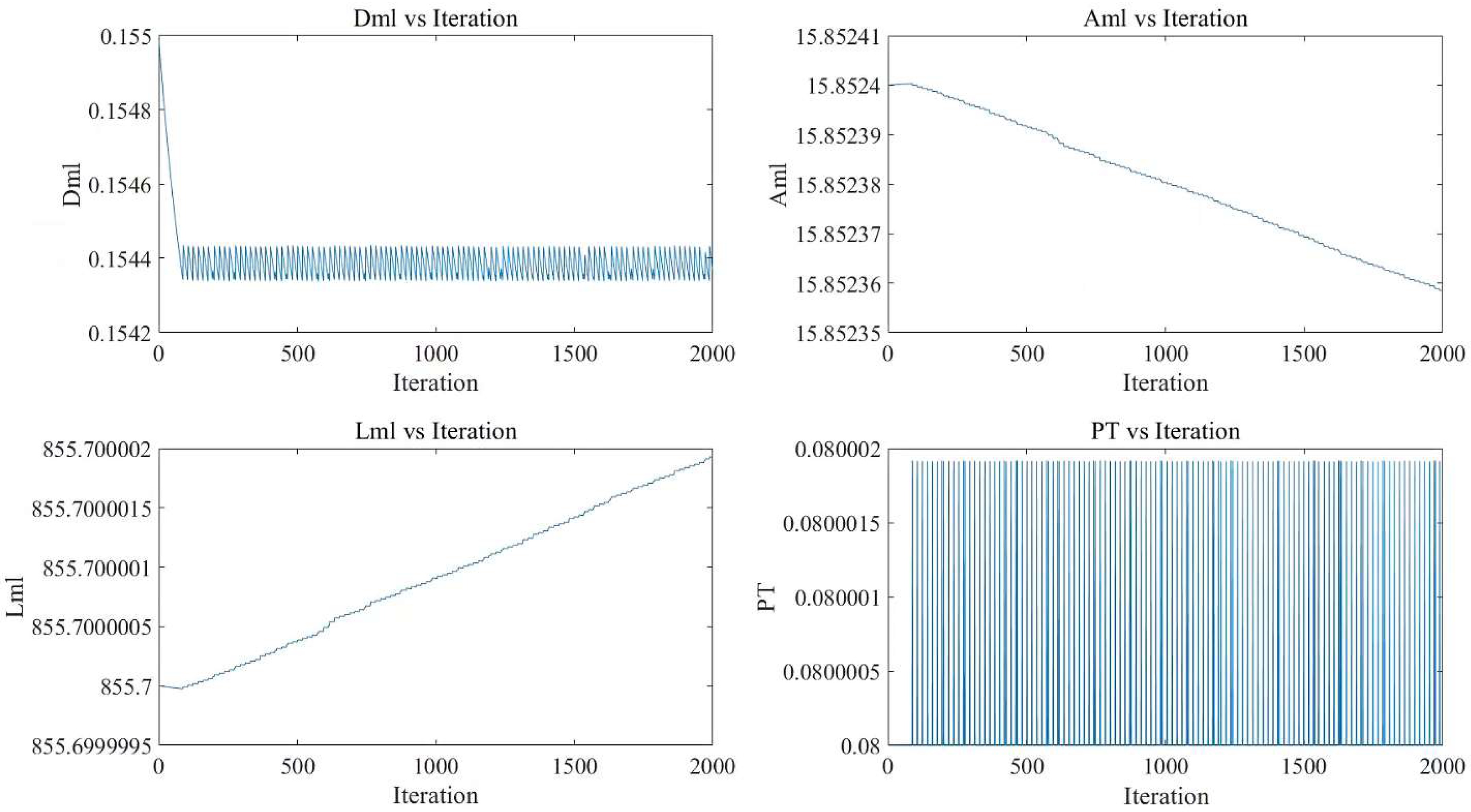
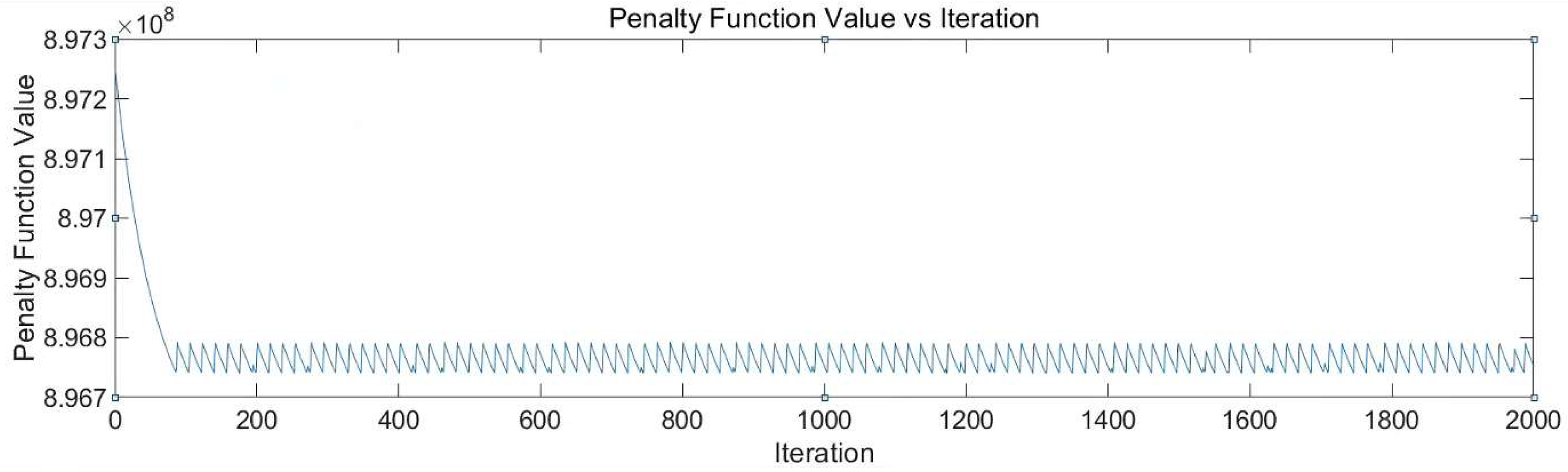
4.3. Optimization Results
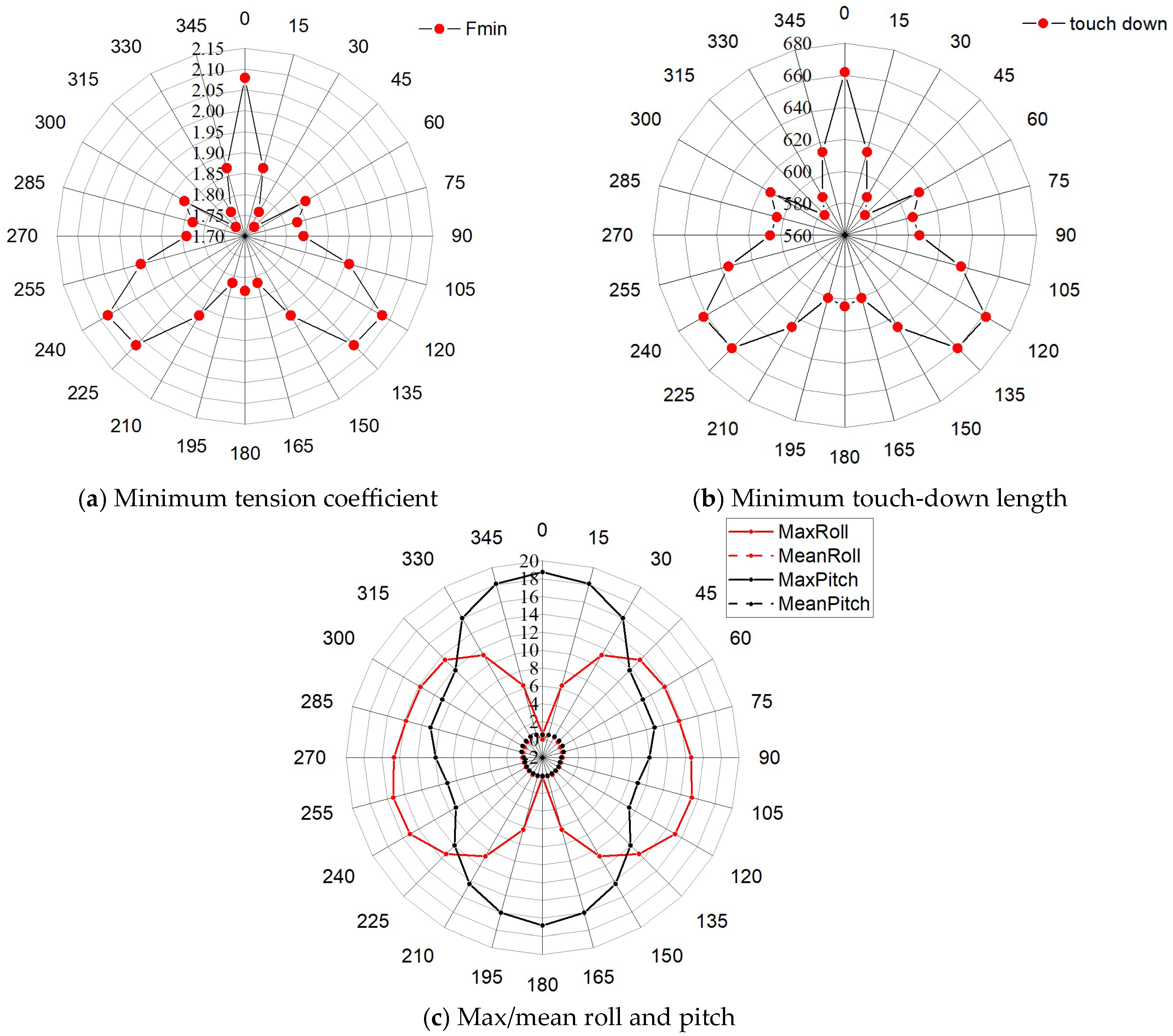
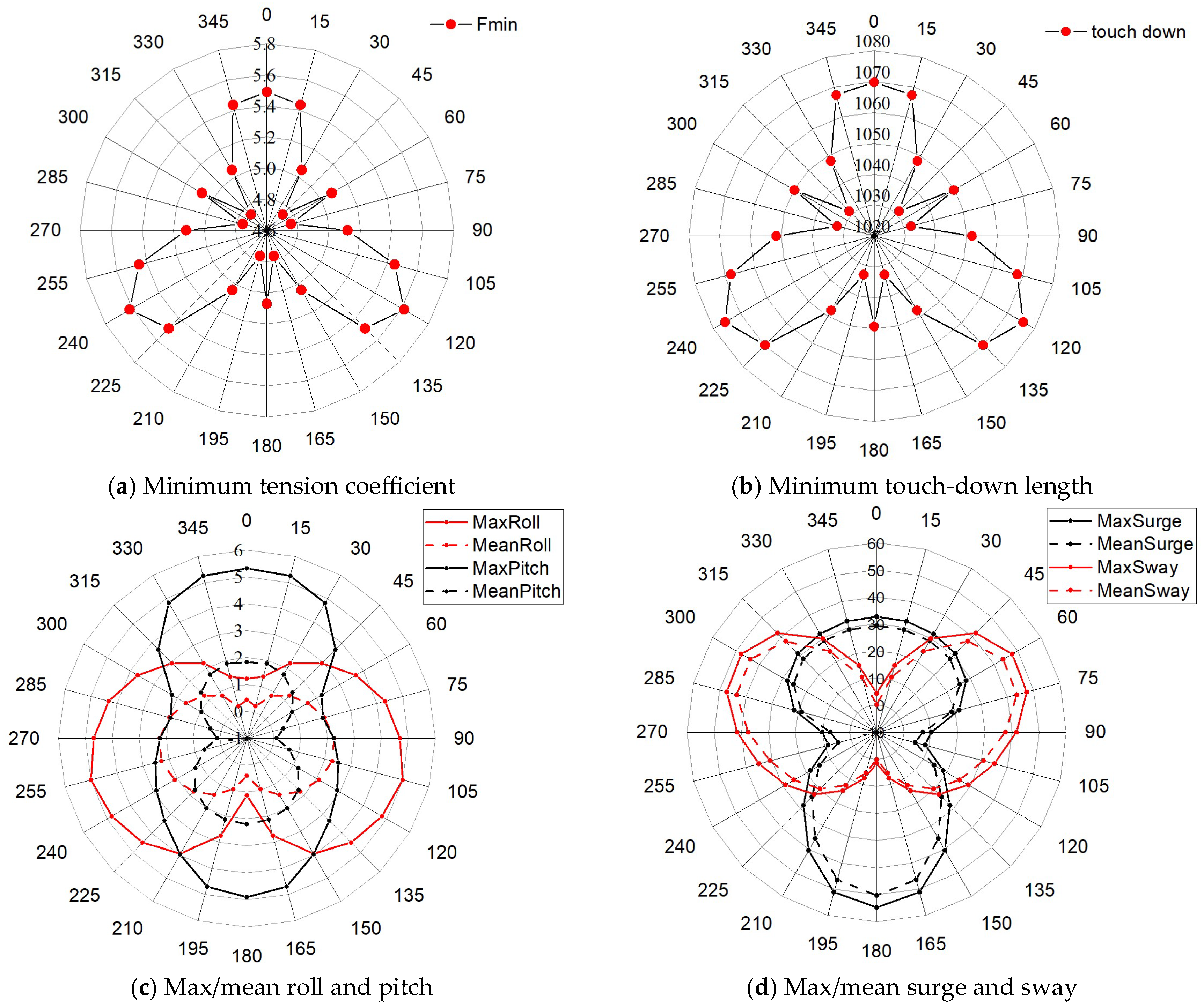
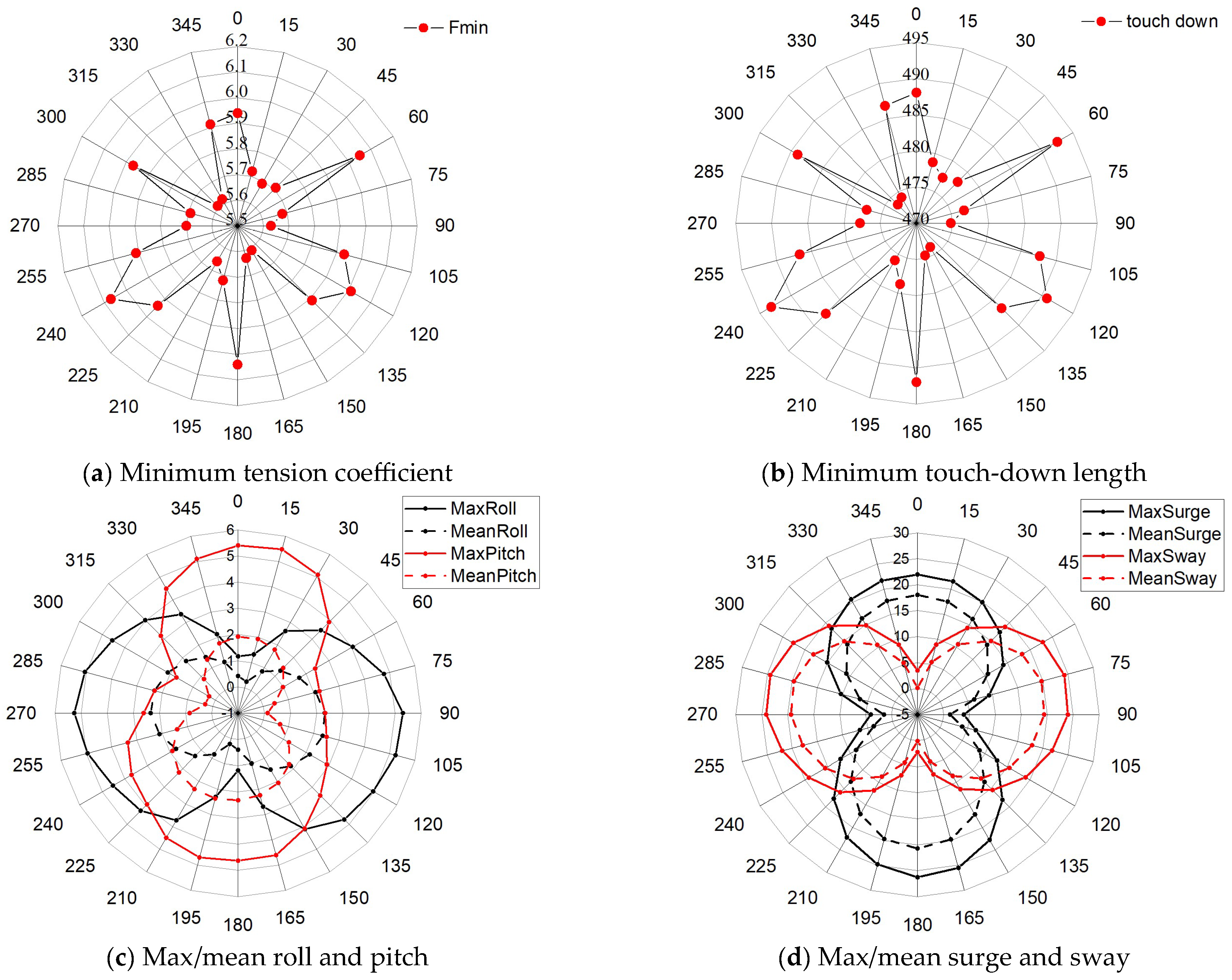
4.4. Hydrodynamic Characteristics of the Optimized Combined System
4.5. Discussion of the Effects of the WECs on the Optimal Mooring System
- (1)
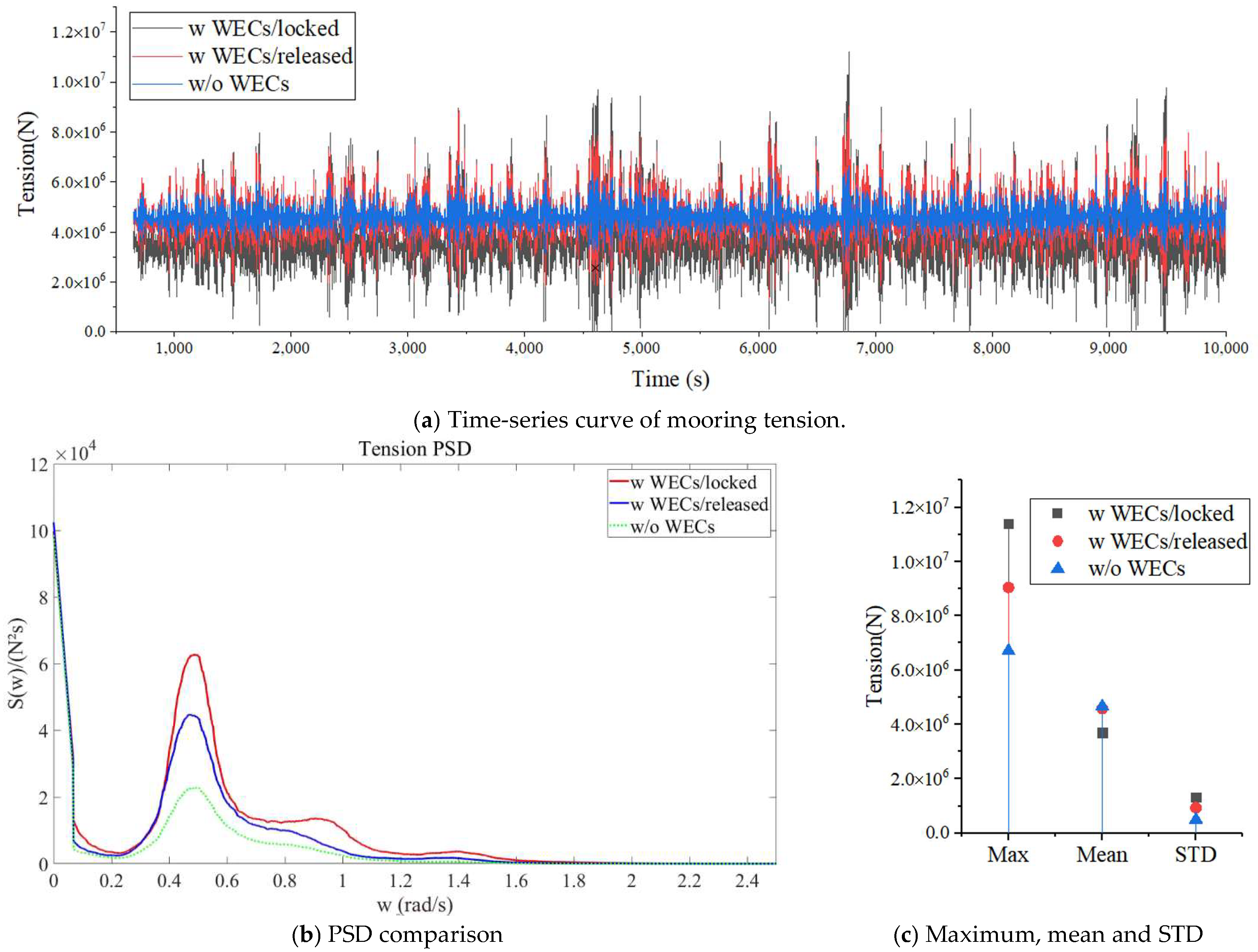
- Time-series analysis
- (2)
- Power spectral density (PSD) analysis
- (3)
- Statistical characteristics
5. Conclusions
- (1)
- The maximum value for the case with WECs in locked mode is about 25% larger than that for the case with WECs in released mode in the extreme conditions. This demonstrates that the influence of WECs in different modes on mooring tension is different, and these factors need to be fully considered in the design and analysis of mooring systems.
- (2)
- Within the wave-frequency range of 0.2–1.2 rad/s, the PSD of the mooring tension for the cases with WECs is significantly higher than that of the case without WECs, meaning that WECs have a prominent influence on mooring tension in the wave frequency range.
- (3)
- Whether in terms of time-series, PSD, or statistical characteristics, the changes in mooring tension are more intense and complex when WECs exist compared with when there are no WECs. Compared with the case without WECs, the maximum values of the cases with WECs in locked mode and released mode increase by about 69% and 35% under the extreme conditions, respectively.
- (4)
- The maximum mooring tension of the case with WECs in released mode increases by about 9.5% when it is compared to that of the case without WECs under rated conditions. When compared with the 35% increase observed under the extreme conditions, it indicates that, as the severity of the sea state rises, the influence of WECs on the entire mooring system also tends to grow.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hall, M.; Kölle, K.; Lozon, E.; Lee, C.F.; McAuliffe, F.D.; Lekkala, M.R.; Bessone, M.B.; Liang, G.; Bayati, I.; Mahfouz, M.Y.; et al. The IEA Wind Task 49 Reference Floating Wind Array Design Basis; NREL/TP-5000-89709; U.S. Department of Energy Office of Scientific and Technical Information: Way Oak Ridge, TN, USA, 2024. [CrossRef]
- French, M.J. On the difficulty of inventing an economical sea wave energy converter: A personal view. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2006, 220, 149–155. [Google Scholar] [CrossRef]
- Lee, C.F.; Tryfonidis, C.; Ong, M.C. Power performance and response analysis of a semi-submersible wind turbine combined with flap-type and torus wave energy converters. J. Offshore Mech. Arct. Eng. 2023, 145, e102412. [Google Scholar] [CrossRef]
- Hu, J.; Zhou, B.; Vogel, C.; Liu, P.; Willden, R.; Sun, K.; Zang, J.; Geng, J.; Jin, P.; Cui, L.; et al. Optimal design and performance analysis of a hybrid system combining a floating wind platform and wave energy converters. Appl. Energy 2020, 269, e114998. [Google Scholar] [CrossRef]
- Sun, K.; Yi, Y.; Zheng, X.; Cui, L.; Zhao, C.; Liu, M.; Rao, X. Experimental investigation of semisubmersible platform combined with point-absorber array. Energy Convers. Manag. 2021, 245, e114623. [Google Scholar] [CrossRef]
- Aubault, A.; Alves, M.; Sarmento, A.; Roddier, D.; Peiffer, A. Modeling of an oscillating water column on the floating foundation Windfloat. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 235–246. [Google Scholar] [CrossRef]
- Peiffer, A.; Roddier, D. Design of an oscillating wave surge converter on the WindFloat* structure. In Proceedings of the 4th International Conference on Ocean Energy, Dublin, Ireland, 17 October 2012. [Google Scholar]
- Michailides, C.; Gao, Z.; Moan, T. Experimental study of the functionality of a semisubmersible wind turbine combined with flap-type wave energy converters. Renew. Energy 2016, 93, 675–690. [Google Scholar] [CrossRef]
- Muliawan, M.J.; Karimirad, M.; Moan, T. STC (Spar-Torus Combination): A combined spar-type floating wind turbine and large point absorber floating wave energy converter—Promising and challenging. In Proceedings of the 31st International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 17–22 June 2012. [Google Scholar]
- Zhou, B.; Hu, J.; Jin, P.; Sun, K.; Li, Y.; Ning, D. Power performance and motion response of a floating wind platform and multiple heaving wave energy converters hybrid system. Energy 2023, 265, e126314. [Google Scholar] [CrossRef]
- Astariz, S.; Iglesias, G. Selecting optimum locations for co-located wave and wind energy farms. Part I: The Co-Location Feasibility index. Energy Convers. Manag. 2016, 122, 589–598. [Google Scholar] [CrossRef]
- Jin, P.; Zheng, Z.; Zhou, Z.; Zhou, B.; Wang, L.; Yang, Y.; Liu, Y. Optimization and evaluation of a semi-submersible wind turbine and oscillating body wave energy converters hybrid system. Energy 2023, 282, e126314. [Google Scholar] [CrossRef]
- Cao, F.; Yu, M.; Liu, B.; Wei, Z.; Xue, L.; Han, M.; Shi, H. Progress of combined wind and wave energy harvesting devices and related coupling simulation techniques. J. Mar. Sci. Eng. 2023, 11, 212. [Google Scholar] [CrossRef]
- Zhang, H.J.; Zhang, N.C.; Cao, X.Y. Conceptualization and dynamic response of an integrated system with a semi-submersible floating wind turbine and two types of wave energy converters. Ocean Eng. 2023, 269, e109031. [Google Scholar] [CrossRef]
- Shi, Y.F.; Lin, J.H.; Zhuge, Z.X.; Zheng, R.Y.; Zhang, J. Conceptual design and dynamic analysis of a wind-wave energy converter with a mass-adjustable buoy. J. Mar. Sci. Eng. 2024, 12, 679. [Google Scholar] [CrossRef]
- Yang, B.; Li, Y.; Zhang, H.; Wang, L. EMCO-Based Optimal Layout Design of Hybrid Wind-Wave Energy Converters Array. Prot. Control Mod. Power Syst. 2024, 9, 142–161. [Google Scholar] [CrossRef]
- Wang, K.; Li, Y.; Zhang, H.; Wang, L. Extreme responses of an integrated system with a semi-submersible wind turbine and four torus-shaped wave energy converters in different survival modes. China Ocean Eng. 2024, 38, 877–892. [Google Scholar] [CrossRef]
- Definition of the IEA 15-Megawatt Offshore Reference Wind Turbine. Available online: https://www.nrel.gov/docs/fy20osti/75698.pdf (accessed on 2 May 2020).
- Allen, C.K.; Viscelli, A.; Dagher, H.J.; Goupee, A.J.; Gaertner, E.; Abbas, N.J.; Hall, M.; Barter, G.E. Definition of the UMaine VolturnUS-S reference platform developed for the IEA wind 15-Megawatt offshore reference wind turbine. J. Offshore Mech. Arct. Eng. 2020, 142, 041702. [Google Scholar] [CrossRef]
- Muskulus, M.; Schafhirt, S. Design optimization of wind turbine support structures—A review. J. Ocean Wind Energy 2014, 1, 12–22. [Google Scholar]
- OES. Task 7: Cost of Energy Assessment for Wave, Tidal and OTEC at an International Level. Ocean Energy Systems. 2015. Available online: https://report2015.ocean-energy-systems.org/main-achievements-in-2015/task-7-cost-of-energy-assessment-for-wave-tidal-and-otec/ (accessed on 10 November 2024).
- Butterfield, S.; Musial, W.; Jonkman, J.; Sclavounos, P. Engineering challenges for floating offshore wind turbines. In National Renewable Energy Laboratory (NREL), Proceedings of the 2005 Copenhagen Offshore Wind Conference, Copenhagen, Denmark, 26–28 October 2005; Midwest Research Institute: Golden, CO, USA, 2005. Available online: https://www.osti.gov/biblio/917212 (accessed on 10 November 2024).
- Ja’e, I.A.; Ali, M.O.A.; Yenduri, A.; Nizamani, Z.; Nakayama, A. Optimisation of mooring line parameters for offshore floating structures: A review paper. Ocean Eng. 2022, 247, 110644. [Google Scholar] [CrossRef]
- Schnepf, A.; Giljarhus, K.E.T.; Johnsen, Ø.; Lopez-Pavon, C. Dynamic power cable configuration design for floating offshore wind turbines using gradient-based optimization. In Proceedings of the ASME 2023 42nd International Conference on Ocean, Offshore and Arctic Engineering (OMAE2023), Boston, MA, USA, 25 June 2023. [Google Scholar] [CrossRef]
- Jiang, Y.C.; Duan, Y.; Li, J.; Chen, M.; Zhang, X. Optimization of mooring systems for a 10MW semisubmersible offshore wind turbines based on neural network. Ocean Eng. 2024, 296, 107335. [Google Scholar] [CrossRef]
- Meduri, A.; Kang, H. Synergistic integration of multiple wave energy converters with adaptive resonance and offshore floating wind turbines through Bayesian optimization. J. Mar. Sci. Eng. 2024, 12, 678. [Google Scholar] [CrossRef]
- Benassai, G.; Campanile, A.; Piscopo, V.; Scamardella, A. Optimization of mooring systems for floating offshore wind turbines. Coastal Eng. J. 2015, 57, 1550021. [Google Scholar] [CrossRef]
- Li, L.; Jiang, Z.; Ong, M.C.; Hu, W. Design optimization of mooring system: An application to a vessel-shaped offshore fish farm. Eng. Struct. 2019, 197, 109363. [Google Scholar] [CrossRef]
- Zhou, Y.; Yan, C.; Shi, W.; Han, X.; Jiang, Z.; Michailides, C. A surrogate optimization modeling method for floating wind turbine mooring line design. In Proceedings of the 34th International Ocean and Polar Engineering Conference (ISOPE), Rhodes, Greece, 15–20 June 2024. [Google Scholar]
- Cressie, N. Spatial prediction and ordinary kriging. Math. Geol. 1988, 20, 405–421. [Google Scholar] [CrossRef]
- Kleijnen, J.P. Kriging metamodeling in simulation: A review. Eur. J. Oper. Res. 2009, 192, 707–716. [Google Scholar] [CrossRef]
- De Pina, A.A.; da Fonseca Monteiro, B.; Albrecht, C.H.; de Lima, B.S.L.P.; Jacob, B.P. Artificial Neural Networks for the analysis of spread mooring configurations for floating production systems. Appl. Ocean Res. 2016, 59, 254–264. [Google Scholar] [CrossRef]
- Trubat, P.; Herrera, A.; Molins, C. Mooring optimization using ML techniques. In Proceedings of the 4th International Offshore Wind Technical Conference (IOWTC2022), Boston, MA, USA, 27–30 June 2022. [Google Scholar]
- Yu, Y.; Zhao, M.; Li, Z.; Zhang, B.; Pang, H.; Xu, L. Optimal design of asymmetrically arranged moorings in a floating production system based on improved particle swarm optimization and RBF surrogate model. Mar. Struct. 2024, 94, 103576. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95 International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in natural and artificial systems. Artif. Intell. 1976, 7, 1–24. [Google Scholar]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Dou, S.; Pegalajar-Jurado, A.; Wang, S.; Bredmose, H.; Stolpe, M. Optimization of floating wind turbine support structures using frequency-domain analysis and analytical gradients. J. Phys. Conf. Ser. 2020, 1618, 042028. [Google Scholar] [CrossRef]
- Ma, Y.; Gao, X.; Liu, C.; Li, J. Improved SQP and SLSQP algorithms for feasible path-based process optimization. Comput. Chem. Eng. 2024, 188, 108751. [Google Scholar] [CrossRef]
- Chen, M.; Xiao, P.; Zhou, H.; Li, C.B.; Zhang, X. Fully Coupled Analysis of an Integrated Floating Wind-Wave Power Generation Platform in Operational Sea-States. Front. Energy Res. 2022, 10, 931057. [Google Scholar] [CrossRef]
- Zhang, X.; Li, B.; Hu, Z.; Deng, J.; Xiao, P.; Chen, M. Research on Size Optimization of Wave Energy Converters Based on a Floating Wind-Wave Combined Power Generation Platform. Energies 2022, 15, 8681. [Google Scholar] [CrossRef]
- Chen, M.; Deng, J.; Yang, Y.; Zhou, H.; Tao, T.; Liu, S.; Sun, L.; Lin, H. Performance Analysis of a Floating Wind-Wave Power Generation Platform Based on the Frequency Domain Model. J. Mar. Sci. Eng. 2024, 12, 0206. [Google Scholar] [CrossRef]
- Jiang, W.; Liang, C.; Tao, T.; Yang, Y.; Liu, S.; Deng, J.; Chen, M. Fully Coupled Analysis of a 10MW Floating Wind Turbine Integrated with Multiple Wave Energy Converters for Joint Wind and Wave Utilization. Sustainability 2024, 16, 9172. [Google Scholar] [CrossRef]
- Gu, X.; Lin, F.; Jiang, W.; Xu, J. Power performance and dynamic characteristics of a 15 MW floating wind turbine with wave energy converter combined concept. Sustain. Horiz. 2025, 13, 100125. [Google Scholar] [CrossRef]
- Muliawan, M.J.; Gao, Z.; Moan, T.; Babarit, A. Analysis of a two-body floating wave energy converter with particular focus on the effects of power take-off and mooring systems on energy capture. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar] [CrossRef]
- Chen, M.; Huang, W.; Liu, H.; Hallak, T.S.; Liu, S.; Yang, Y.; Tao, T.; Jiang, Y. A Novel SPM Wind-Wave-Aquaculture System: Concept Design and Fully Coupled Dynamic Analysis. Ocean Eng. 2025, 315, 119798. [Google Scholar] [CrossRef]
- Chen, M.; Yun, Q.; Hallak, T.S.; Zhou, H.; Zhang, K.; Yang, Y.; Tao, T.; Liu, S.; Jiang, W.; Li, C. Comparative Study on the Performances of a Hinged Flap-Type Wave Energy Converter Considering Both Fixed and Floating Bases. J. Mar. Sci. Eng. 2024, 12, 1416. [Google Scholar] [CrossRef]
- Position Mooring: DNVGL-OS-E301. Available online: https://www.document-center.com/standards/show/DNV-OS-E301 (accessed on 1 July 2021).
- Benifla, V.; Adam, F. Development of a genetic algorithm code for the design of cylindrical buoyancy bodies for floating offshore wind turbine substructures. Energies 2022, 15, 1181. [Google Scholar] [CrossRef]
- Wen, X.; Yin, G.; Liu, T.; Ong, M.C.; Wang, C.; Wang, K. An Optimization Framework for Mooring Design of Floating Offshore Wind Turbines Using a Genetic Algorithm based on a Surrogate Model. Renew. Energy 2025, 245, 122807. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Parameter | Value | Unit |
|---|---|---|---|
| UMaine VolturnUS-S | Displacement | 20,206 | [m3] |
| Draft | 20 | [m] | |
| Vertical gravity center relative to SWL | −14.94 | [m] | |
| Vertical buoyancy center relative to SWL | −13.63 | [m] | |
| Water depth | 200 | [m] | |
| IEA-15-240-RWT | Rated power | 15 | [MW] |
| Cut-in, rated, and cut-out wind speed | 3, 10.59, 25 | [m/s] | |
| Rated rotor speed | 7.55 | [rpm] | |
| Blade length | 120 | [m] | |
| Hub height relative to SWL | 150 | [m] | |
| Tower length | 129.5 | [m] |
| Parameter | Value | Unit | |
|---|---|---|---|
| Torus 0 | The Rest of Torus | ||
| Outer and inner diameter at SWL | 24/12 | 26/14 | [m] |
| Mass Displacement | 4.7956 × 105 | 5.1145 × 105 | [t] |
| Height | 8 | 8 | [m] |
| Draft | 2 | 2 | [m] |
| Vertical gravity center relative to SWL | −0.9 | −0.9 | [m] |
| Stroke length | 6 | 6 | [m] |
| End stop spring stiffness of upper and lower ends | 1 × 106 | 1 × 106 | [kN/m] |
| Linear damping coefficient of PTO | 10,000 | 10,000 | [KN·s/m] |
| Linear stiffness coefficient of PTO | 10 | 10 | [kN/m] |
| Condition | Significant Waves Height | Peak Period | Current Speed | Mean Wind Speed at Hub |
|---|---|---|---|---|
| Rated conditions | 6.6 m | 11.6 s | 1.33 m/s | 10.59 m/s |
| Extreme conditions | 11.7 m | 13.3 s | 2.40 m/s | 51.2 m/s |
| Mooring Line Coefficients | Value Related to the Nominal Chain Diameter |
|---|---|
| Normal and tangential Drag | 2.40/1.15 |
| Normal and Tangential Added Mass | 1.00/1.00 |
| Design Variable | Initial Value | Lower Bound | Upper Bound | Unit |
|---|---|---|---|---|
| Azimuth angle Aml | 5 | 5 | 16 | deg |
| Diameter Dml | 0.147 | 0.08 | 0.17 | m |
| Length Lml | 1500 | 500 | 1000 | m |
| Pretension coefficient PTml | 8% | 8% | 25% | MBL |
| No. | Constraint | Description | |
|---|---|---|---|
| The combined system’s motions | 1 | q1 < 25 m, q2 < 25 m | Keep the system’s peak surge-sway offset under 25 m in the rated conditions to limit design constraints on a dynamic electrical umbilical [19]. |
| 2 | q4 < 4 deg, q5 < 4 deg | The mean roll and pitch value at tower top in the time series are less than 4 deg in the rated conditions. | |
| 3 | q4 < 5 deg, q5 < 5 deg | The mean roll and pitch value at tower top in the time series are less than 5 deg in the extreme conditions. | |
| Mooring line system | 5 | F = Fbreakstrenth/Tmax > 1.67 | The safety coefficient of tension larger than 1.67 in the extreme conditions. |
| 6 | F= Floadstrenth/Tmax > 1.67 | The safety coefficient of tension larger than 1.67 in the rated conditions. | |
| 7 | Lmin = Lml − FVfmax/w ≥ 100 m | The minimum touch-down length larger than 100 m in the rated conditions. | |
| 8 | FVamax < Ganchor | The vertical force at the anchor less than the anchor gravity force in the extreme conditions. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Liu, S.; Guo, X.; Chen, W.; Tao, T.; Wu, H.; Wang, K. The Mooring Optimization and Hydrodynamic Characteristics of the Combined Concept of a 15 MW FOWT with WECs. J. Mar. Sci. Eng. 2025, 13, 545. https://doi.org/10.3390/jmse13030545
Yang Y, Liu S, Guo X, Chen W, Tao T, Wu H, Wang K. The Mooring Optimization and Hydrodynamic Characteristics of the Combined Concept of a 15 MW FOWT with WECs. Journal of Marine Science and Engineering. 2025; 13(3):545. https://doi.org/10.3390/jmse13030545
Chicago/Turabian StyleYang, Yi, Shi Liu, Xinran Guo, Wen Chen, Tao Tao, Hao Wu, and Kai Wang. 2025. "The Mooring Optimization and Hydrodynamic Characteristics of the Combined Concept of a 15 MW FOWT with WECs" Journal of Marine Science and Engineering 13, no. 3: 545. https://doi.org/10.3390/jmse13030545
APA StyleYang, Y., Liu, S., Guo, X., Chen, W., Tao, T., Wu, H., & Wang, K. (2025). The Mooring Optimization and Hydrodynamic Characteristics of the Combined Concept of a 15 MW FOWT with WECs. Journal of Marine Science and Engineering, 13(3), 545. https://doi.org/10.3390/jmse13030545