
The Local Path Planning Algorithm for Amphibious Robots Based on an Improved Dynamic Window Approach

Abstract
1. Introduction
1.1. Background
1.2. Problem Description
- Environmental Adaptation: Unlike traditional DWA improvements that focus on either land or water environments, IDWA incorporates a water–land hybrid kinematic model that enables seamless transition between different mediums. This is particularly crucial for amphibious robots operating in complex water–land environments.
- Dynamic Resolution Control: Previous studies typically use fixed velocity resolution, which can be inefficient in varying obstacle densities. IDWA introduces an adaptive velocity resolution mechanism that automatically adjusts based on environmental complexity, improving both computational efficiency and path quality.
- Obstacle Prediction Integration: While some studies have addressed moving obstacles, IDWA uniquely combines kinematic modeling with dynamic obstacle prediction, making it particularly effective for complex water–land environments where obstacles may exhibit different movement patterns in different mediums.
- Multi-objective Optimization: Unlike previous approaches that use fixed evaluation parameters, IDWA employs adaptive weighting coefficients and introduces a distance cost function, specifically addressing the challenges of target reachability and endpoint overshooting in amphibious operations.
2. Model Construction
2.1. Hybrid Water–Land Kinematic Model
- Integration of multi-modal locomotion: Unlike single-environment models, our hybrid framework combines underwater (5-DOF) and land (3-DOF) motion characteristics into a unified model, enabling smooth transitions between different locomotion modes.
- Terrain-adaptive parameters: The model introduces terrain-specific parameters ( and ) that dynamically adjust to varying slopes and elevations, allowing the robot to adapt to complex topographical changes in both water and land environments.
- Mode-specific constraints: The model incorporates different kinematic constraints for each locomotion mode, such as reduced degrees of freedom during water–land transitions and varying velocity and acceleration limits for different environments.
- Environmental adaptation: Through the hybrid structure, the model can automatically switch between appropriate kinematic parameters based on the current environment, ensuring optimal performance in both aquatic and terrestrial operations.
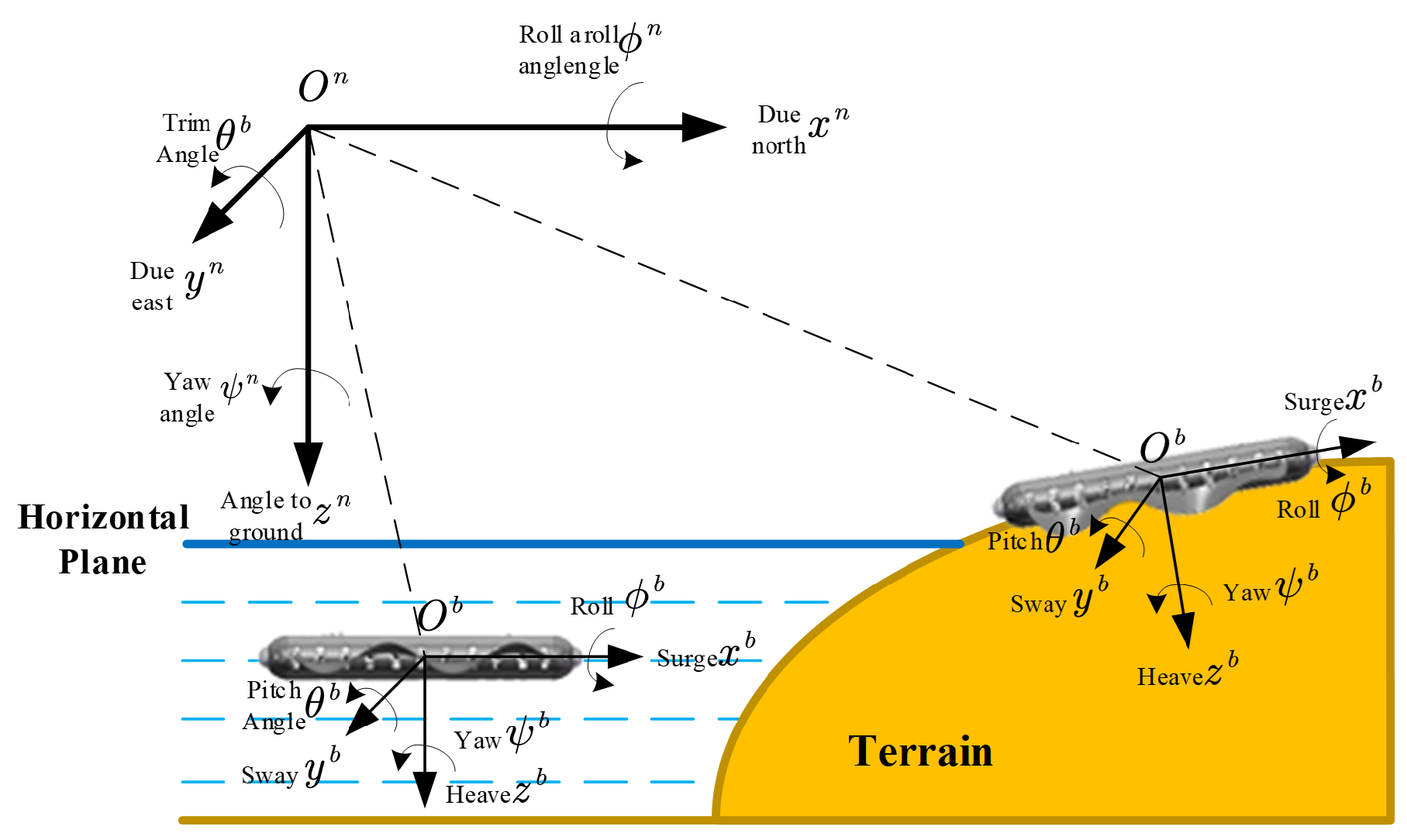
2.1.1. Establishment of Underwater Kinematic Model
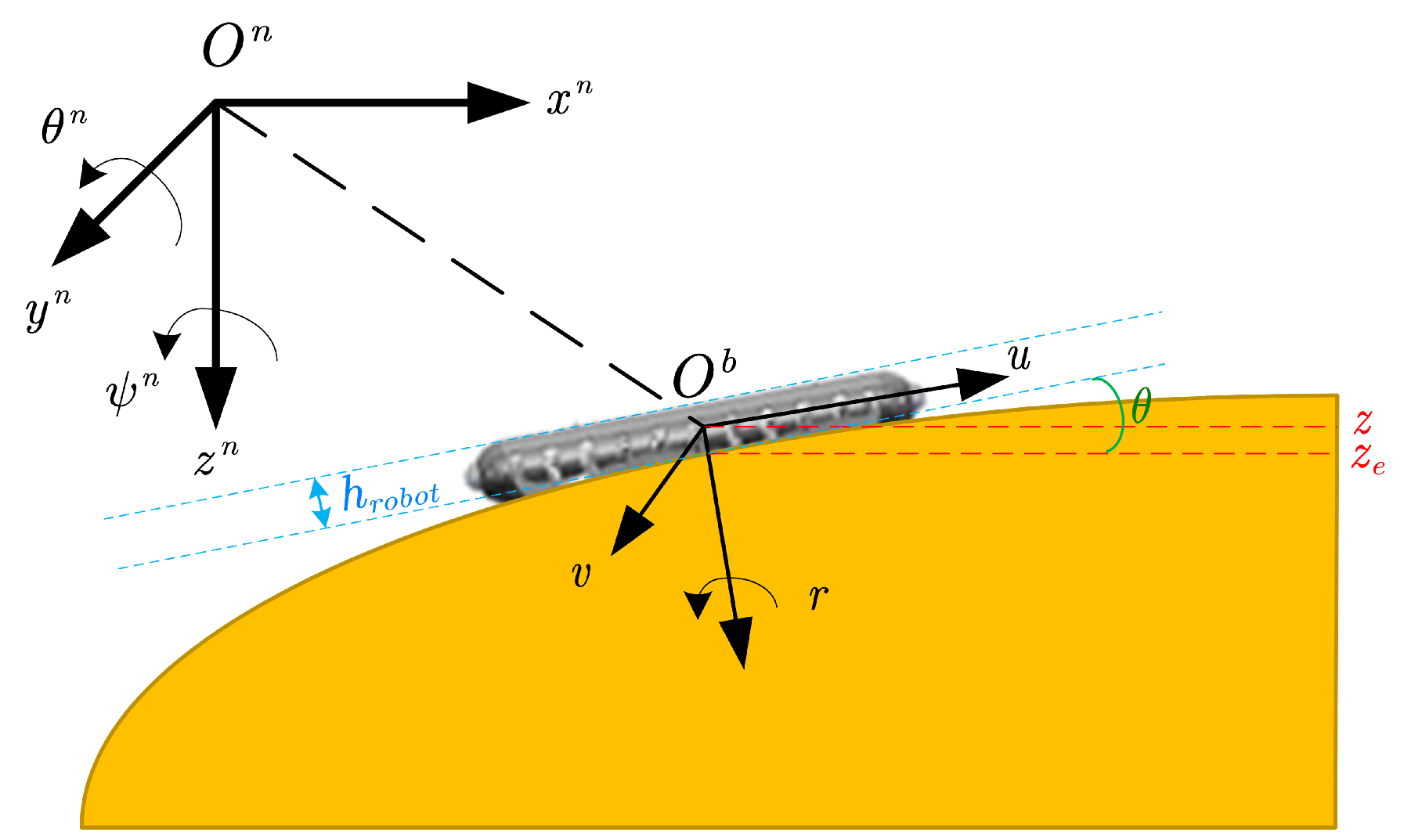
2.1.2. Establishment of Land Kinematic Model
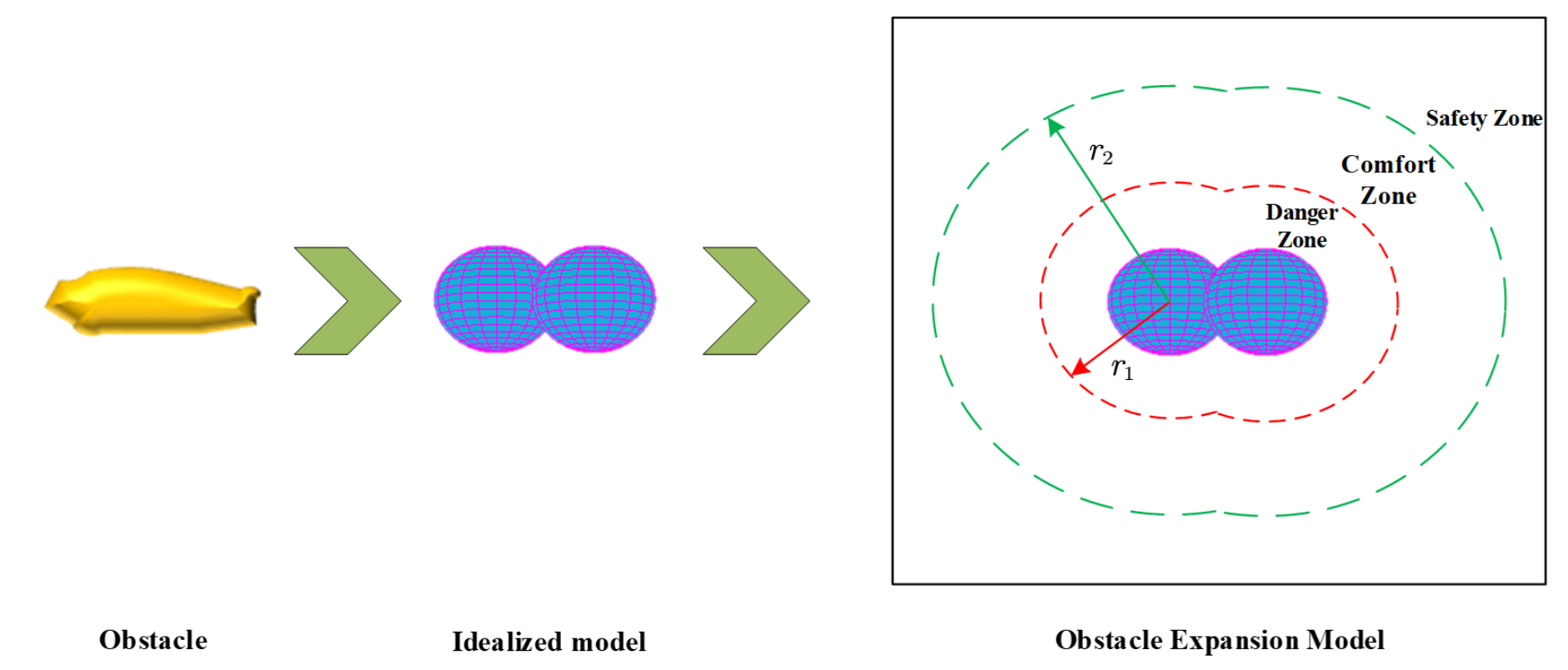
2.2. Obstacle Expansion Model
3. Improved Dynamic Window Approach
3.1. Improved Evaluation Function
- When the heading factor is unsuitable, the robot may stop moving forward when approaching obstacles in the path, resulting in an unreachable target.
- When the safety factor is unsuitable, the robot may frequently change direction to avoid obstacles, leading to missing target and even circling.
- When the velocity factor is unsuitable, the robot may neglect safety while multiple obstacles around the path and may overshoot when approaching the endpoint.
3.2. Adaptive Velocity Resolution
3.3. Dynamic Obstacle Prediction
- State representation: Define the state vector of the obstacle, including position, linear velocity, and acceleration as shown in Equation (13):In the above equation, i represent the obstacle index, t represent the current time step, and , , and represent the obstacle location. Meanwhile, , , and represent the linear velocities of the obstacle. , , and represent the accelerations of the obstacle.
- Location acquisition: The obstacle’s position can be obtained in real time by sensor arrays such as LiDAR, visual cameras, sonar, etc.
- Sliding window processing: A sliding window can be constructed by three consecutive points of the obstacle’s dynamic trajectory. Assuming the obstacle’s motion follows a uniformly accelerated linear pattern within a short period, its current velocity and acceleration are estimated using the difference method as shown in Equation (14):
- State estimation: Based on the kinematic model, the position of the obstacle can be predicted at the next time point according to Equation (15):
- Dynamic obstacle avoidance: The predicted position of the obstacles at the next time point is the same as that of the obstacle for avoidance. In the IDWA algorithm, the robot performs local path planning and obstacle avoidance with the IDWA.
- Repeat the above steps until the end point is reached.
- Linear motion with constant velocity: As shown in Table 1, obstacles move in straight lines with different velocities (0.1–0.8 m/s). The IDWA achieves a 98.3.
- Circular motion with varying angular velocity: Obstacles are programmed to move in circular patterns with radii ranging from 2 m to 5 m and angular velocities between 0.1 and 0.3 rad/s. The algorithm demonstrates 95.7.
- Random walk with sudden direction changes: Obstacles were set to change direction randomly every 3–5 s with velocities varying between 0.2a and 0.6 m/s. Despite the unpredictable nature of movement, the IDWA maintains 92.1.
- Group movement with multiple coordinated obstacles: Multiple obstacles (3–5) are programmed to move in coordinated patterns, simulating scenarios like fish schools or vessel groups. The algorithm achieves 90.5.
4. Experimental Evaluation
4.1. Simulation
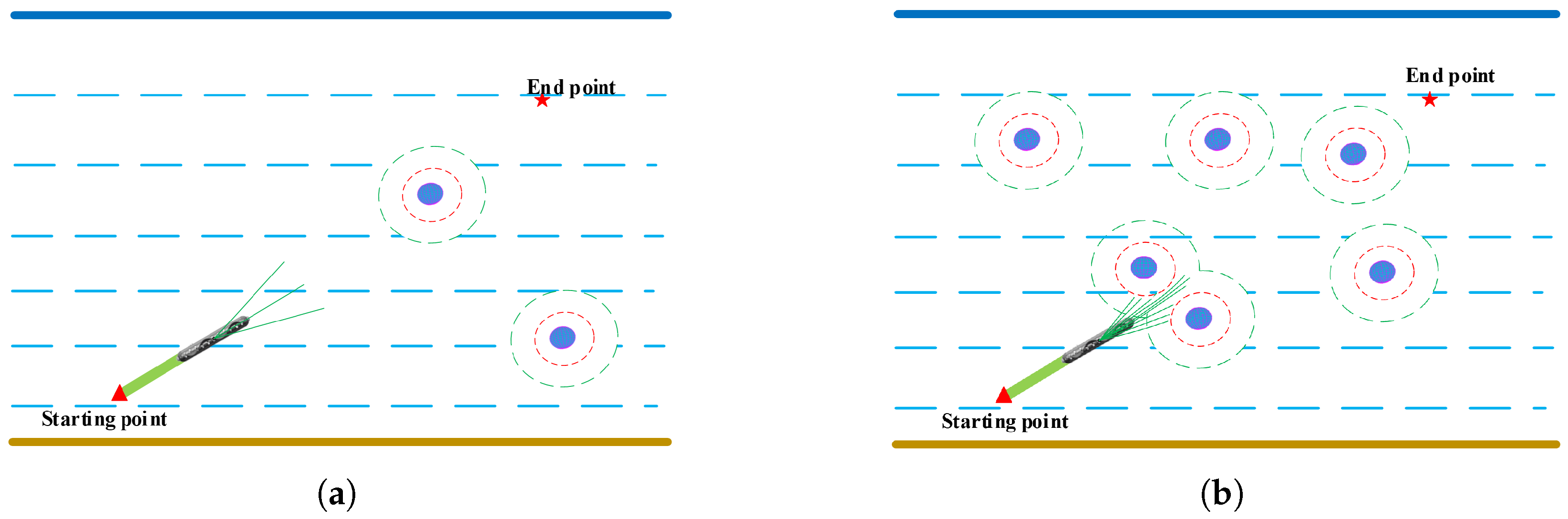
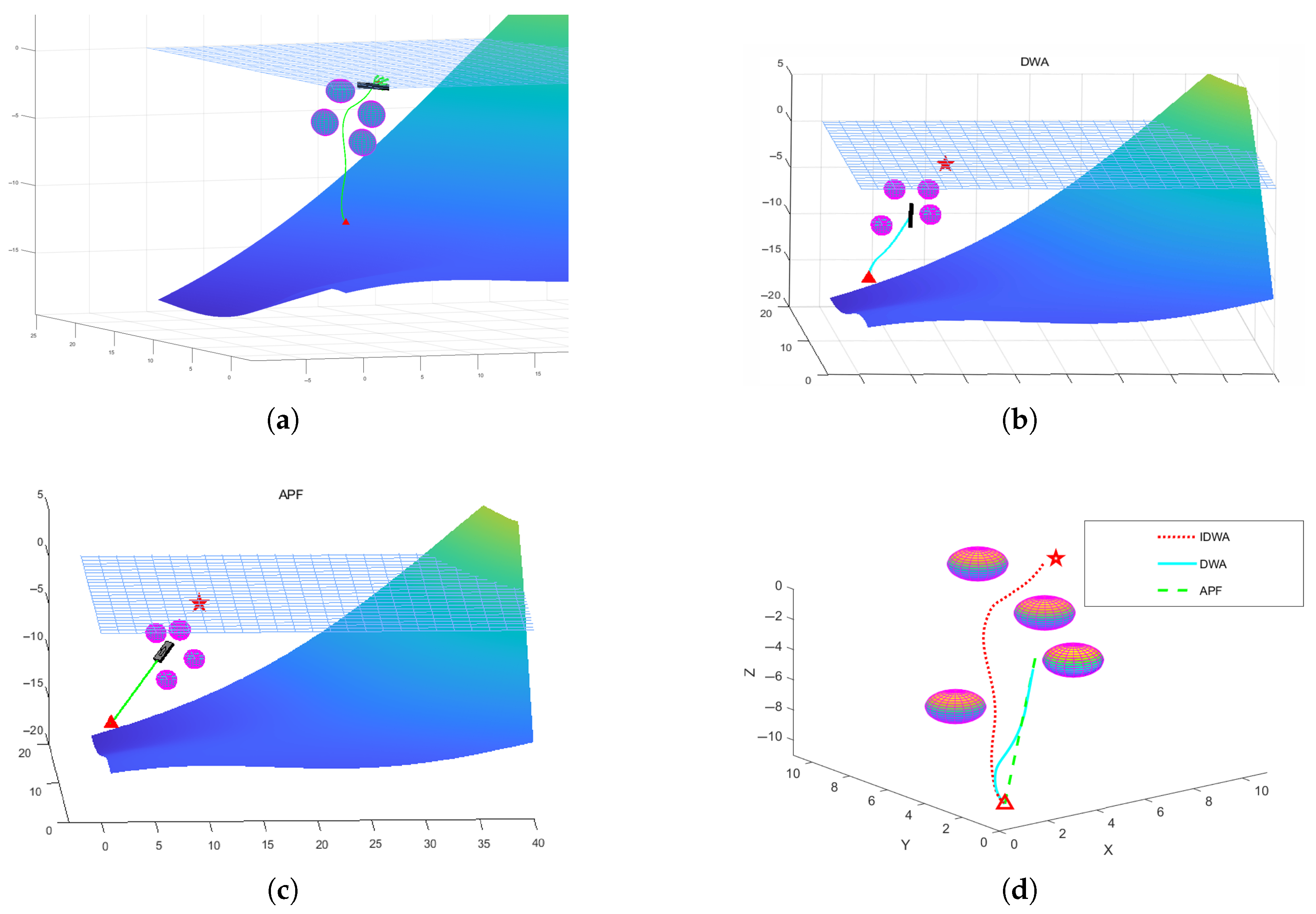
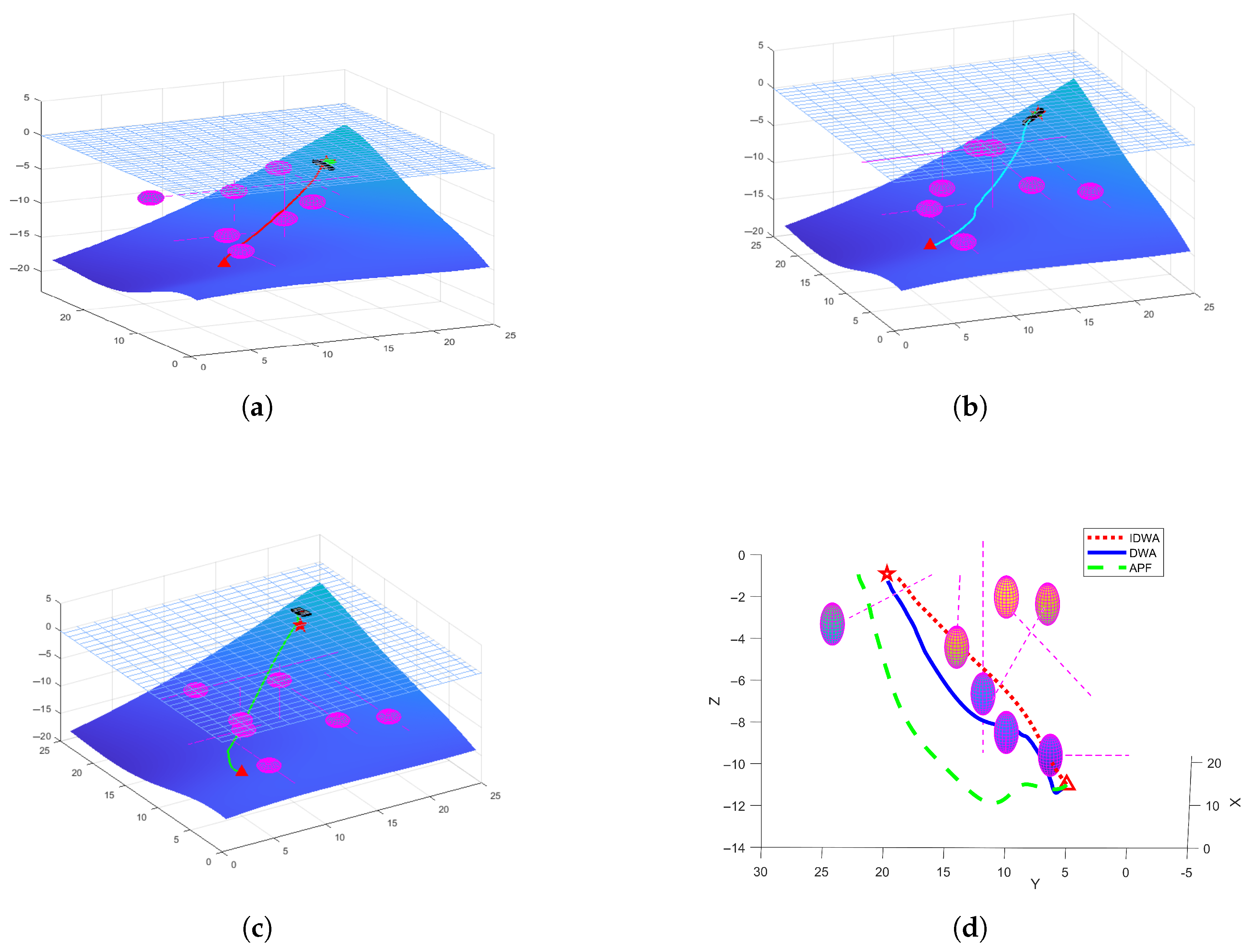
4.1.1. Simulation Experiment for Unreachable Target
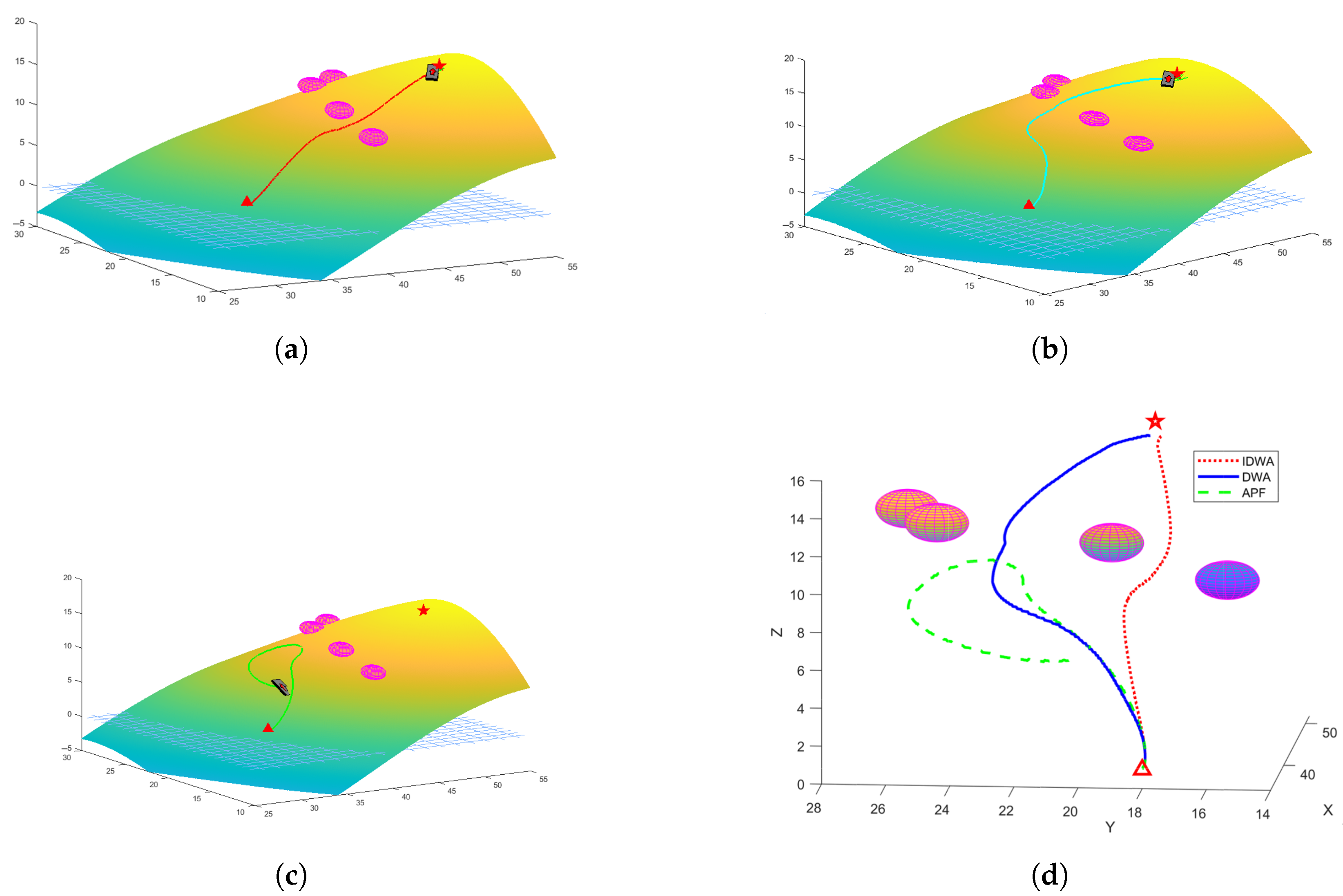
4.1.2. Simulation Experiment for Land Traversal
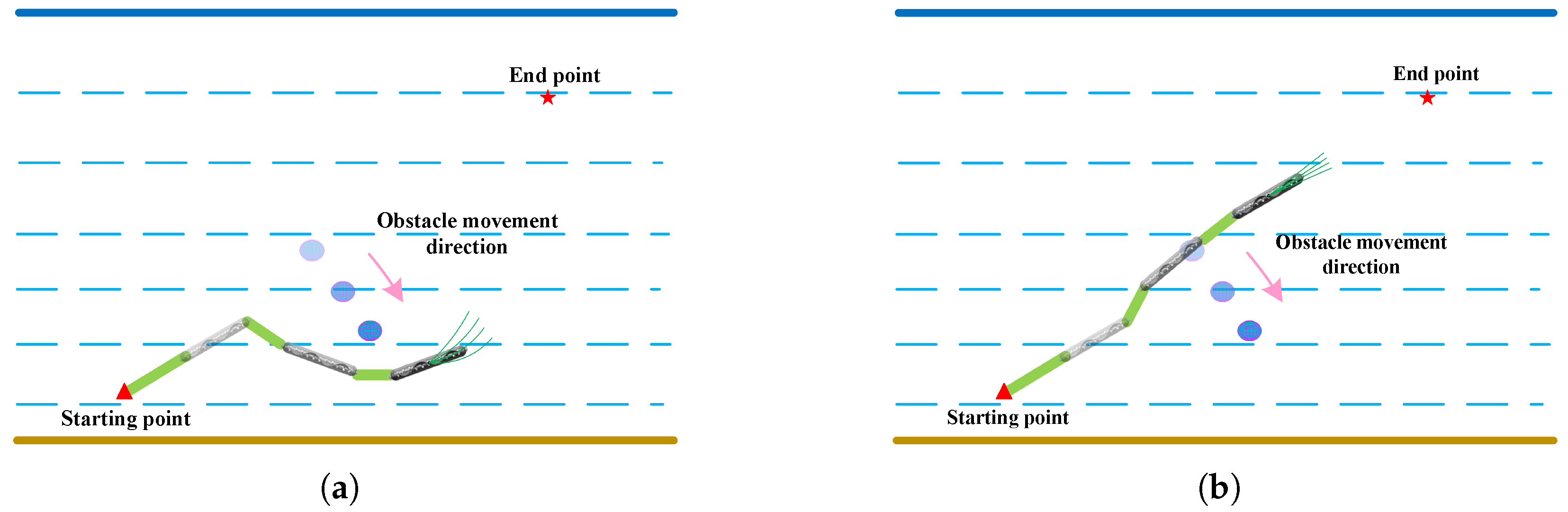
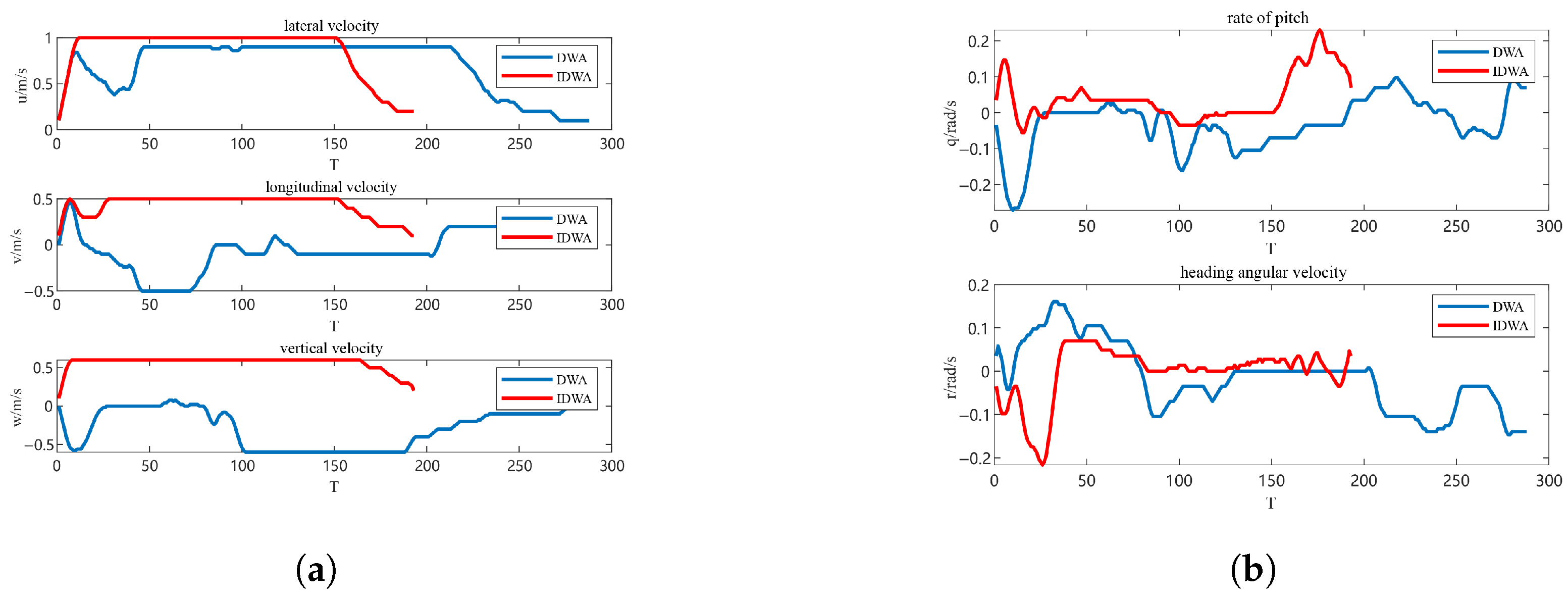
4.1.3. Simulation Experiment for Moving Obstacle
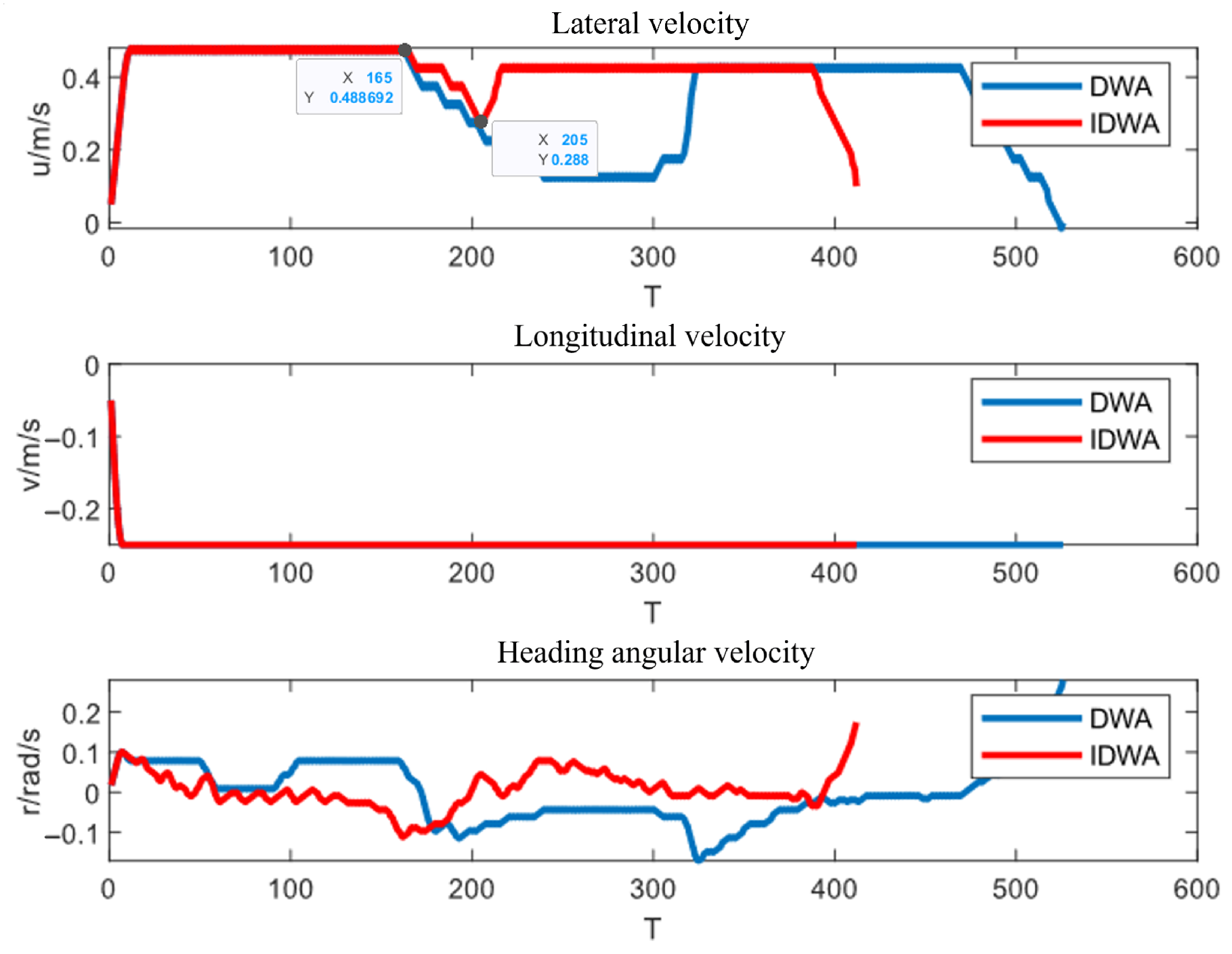
4.1.4. Simulation Results
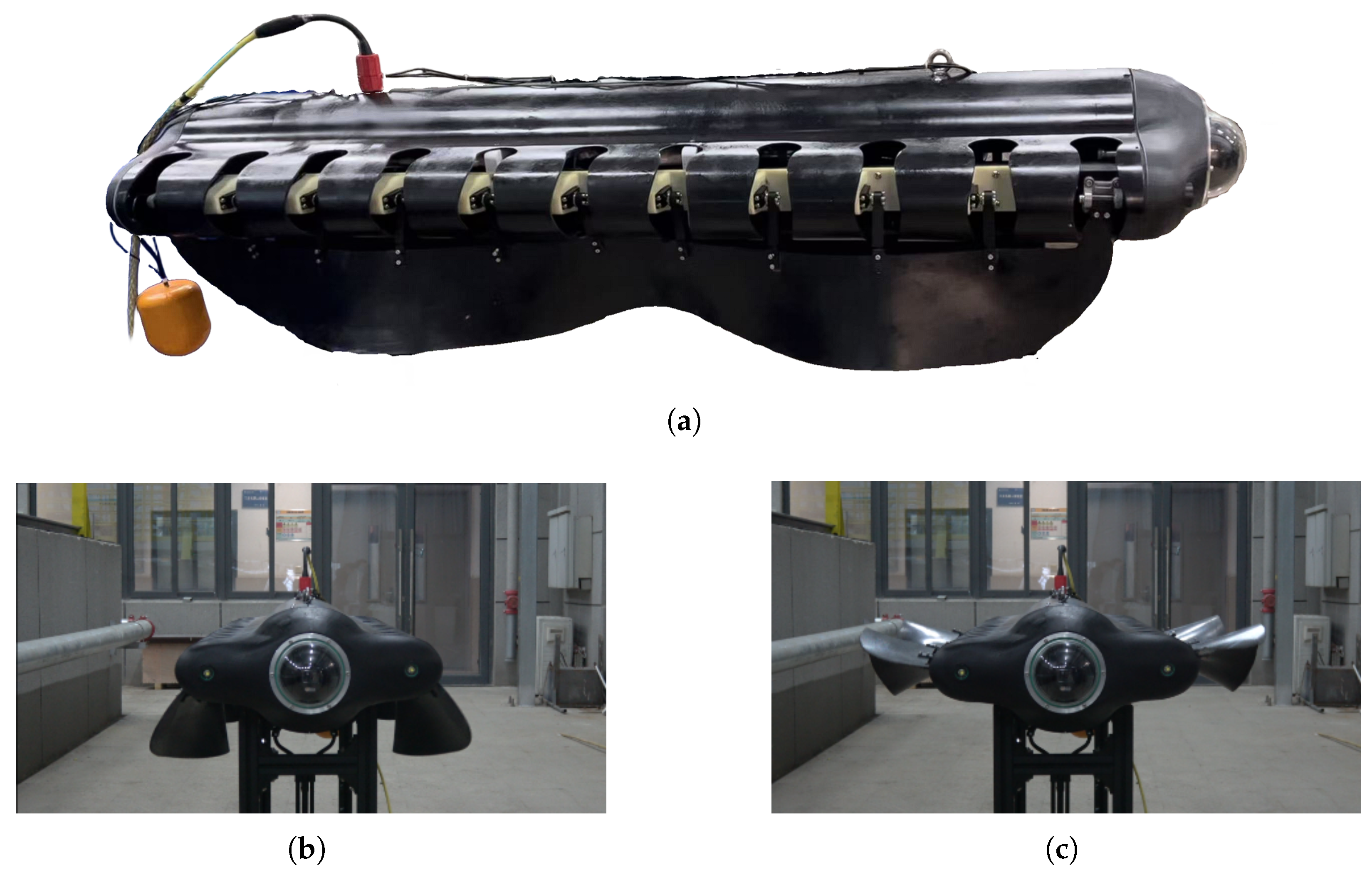
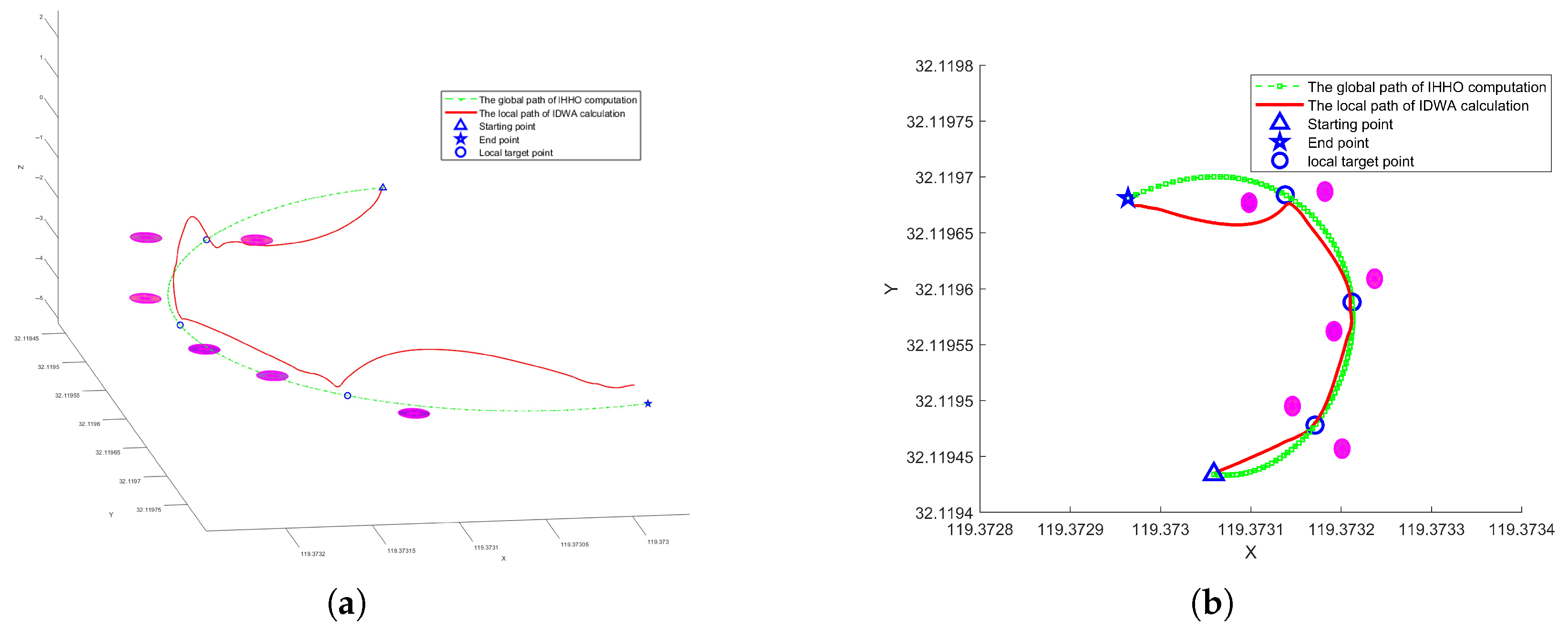
4.2. Lake Experiment
- Drive system:
- -
- Undulating fins actuated by high-torque servos (60 kg cm) for underwater propulsion.
- -
- Fin-based locomotion generating kinematic wave patterns for various motion modes.
- Sensor suite:
- -
- Navigation system: WTGAHRS2 high-precision inertial navigation system. (Wit-Motion Technology Co., Ltd., Shenzhen, China).
- *
- Integrated JY901B IMU and GPS module.
- *
- Advanced dynamic solving and Kalman filtering algorithms.
- -
- Depth sensor: AS-131 pressure transmitter. (AutoSensor Technologies Co., Ltd., Zhengzhou, China).
- *
- 316 L stainless steel isolation diaphragm.
- *
- Temperature-compensated zero point and sensitivity.
- *
- High anti-interference and overload protection.
- -
- Altimeter: ISA500 subsea altimeter (Impact Subsea Ltd., Bridge of Don, Aberdeen, UK).
- *
- 500 kHz acoustic signal with digital acoustic technology.
- *
- Integrated attitude and heading measurement.
- -
- Underwater lighting: LM3409-based LED system. (Texas Instruments Inc., Dallas, TX, USA).
- *
- Input voltage: 6–75 V.
- *
- PWM dimming range: 10,000:1.
- Communication:
- -
- E62-DTU (433D30) wireless transmission module. (Chengdu Ebyte Electronic Technology Co., Ltd., Chengdu, China).
- *
- Full-duplex point-to-point transmission.
- *
- 1 W transmission power at 433 MHz.
- *
- Frequency hopping spread spectrum (FHSS).
- *
- RS232/RS485 interface support.
- Sensor data acquisition and processing:
- -
- WTGAHRS2 provides attitude and position data at 100 Hz.
- -
- AS-131 pressure transmitter updates depth information at 10 Hz.
- -
- ISA500 altimeter delivers height measurements at 20 Hz.
- -
- All sensor data are synchronized through the FreeRTOS message queue system.
- State estimation and environment perception:
- -
- Robot pose estimation using Kalman filter fusion of IMU and GPS data.
- -
- Depth calculation using pressure-to-depth conversion ().
- -
- Real-time obstacle detection using sonar and vision data.
- -
- Environmental classification for water–land transition zones.
- Path planning implementation:
- -
- IDWA algorithm runs at 10 Hz planning cycle.
- -
- Dynamic window parameters adjusted based on current motion mode (water–land).
- -
- Obstacle prediction updated at 5 Hz for moving obstacle avoidance.
- -
- Local path segments generated with 0.15 s time step.
- Motion control execution:
- -
- Servo control signals updated at 100 Hz for fin undulation.
- -
- Adaptive gain scheduling for different locomotion modes.
- -
- Smooth transition handling between water and land operations.
- -
- Real-time trajectory tracking with feedback control.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xia, M.; Wang, H.; Yin, Q.; Shang, J.; Luo, Z.; Zhu, Q. Design and Mechanics of a Composite Wave-driven Soft Robotic Fin for Biomimetic Amphibious Robot. J. Bionic Eng. 2023, 20, 934–952. [Google Scholar] [CrossRef]
- Rafeeq, M.; Toha, S.F.; Ahmad, S.; Razib, M.A. Locomotion Strategies for Amphibious Robots—A Review. IEEE Access 2021, 9, 26323–26342. [Google Scholar] [CrossRef]
- Ding, W.; Zhang, L.; Zhang, G.; Wang, C.; Chai, Y.; Yang, T.; Mao, Z. Research on obstacle avoidance of multi-AUV cluster formation based on virtual structure and artificial potential field method. Comput. Electr. Eng. 2024, 117, 109250. [Google Scholar] [CrossRef]
- Ohn, S.W.; Namgung, H. Requirements for optimal local route planning of autonomous ships. J. Mar. Sci. Eng. 2022, 11, 17. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, T.; Xu, Y.; Liu, H.; Liu, F. Local Path Planning of the Autonomous Vehicle Based on Adaptive Improved RRT Algorithm in Certain Lane Environments. Actuators 2022, 11, 109. [Google Scholar] [CrossRef]
- Tang, F. Coverage path planning of unmanned surface vehicle based on improved biological inspired neural network. Ocean Eng. 2023, 278, 114354. [Google Scholar] [CrossRef]
- Xing, T.; Wang, X.; Ding, K.; Ni, K.; Zhou, Q. Improved Artificial Potential Field Algorithm Assisted by Multisource Data for AUV Path Planning. Sensors 2023, 23, 6680. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.; Zhang, M.; Zhuang, Y.; Ma, C.; Li, Q. A survey of path planning of industrial robots based on rapidly exploring random trees. Front. Neurorobotics 2023, 17, 1268447. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Chi, W.; Li, C.; Wang, C.; Meng, M.Q.H. Neural RRT*: Learning-Based Optimal Path Planning. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Shen, C.; Soh, G.S. Targeted Sampling Dynamic Window Approach: A Path-Aware Dynamic Window Approach Sampling Strategy for Omni-Directional Robots. J. Mech. Robot. 2024, 16, 111001. [Google Scholar] [CrossRef]
- Kobayashi, M.; Motoi, N. Local Path Planning: Dynamic Window Approach with Virtual Manipulators Considering Dynamic Obstacles. IEEE Access 2022, 10, 17018–17029. [Google Scholar] [CrossRef]
- Dong, D.; Dong, S.; Zhang, L.; Cai, Y. Path Planning Based on A-Star and Dynamic Window Approach Algorithm for Wild Environment. J. Shanghai Jiaotong Univ. (Sci.) 2024, 29, 725–736. [Google Scholar] [CrossRef]
- Li, W.; Wang, L.; Fang, D.; Li, Y.; Huang, J. Path planning algorithm combining A* with DWA. Syst. Eng. Electron. 2021, 43, 3694–3702. [Google Scholar]
- Dai, X. Global existence of solution for multidimensional generalized double dispersion equation. Bound. Value Probl. 2019, 2019, 155. [Google Scholar] [CrossRef]
- Zhang, X. Path Planning Based on YOLOX and Improved Dynamic Window Approach. In Proceedings of the International Conference on Genetic and Evolutionary Computing, Kaohsiung, Taiwan, 6–8 October 2024; Volume 1145, pp. 26–36. [Google Scholar]
- Si, M.; Zhou, X.; Zhang, Y. Improvement of Dynamic Window Approach in Dynamic Obstacle Environment. In Proceedings of the Journal of Physics: Conference Series, Hangzhou, China, 30 June–2 July 2023; Voume 2477. [Google Scholar]
- Yao, M.; Deng, H.; Feng, X.; Li, P.; Li, Y.; Liu, H. Improved dynamic windows approach based on energy consumption management and fuzzy logic control for local path planning of mobile robots. Comput. Ind. Eng. 2024, 187, 109767. [Google Scholar] [CrossRef]
- Cao, Y.; Mohamad Nor, N. An improved dynamic window approach algorithm for dynamic obstacle avoidance in mobile robot formation. Decis. Anal. J. 2024, 11, 100471. [Google Scholar] [CrossRef]
- Guo, J.; Huo, X.; Guo, S.; Xu, J. A Path Planning Method for the Spherical Amphibious Robot Based on Improved A-star Algorithm. In Proceedings of the 2021 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 8–11 August 2021; pp. 1274–1279. [Google Scholar] [CrossRef]
- Xiang, L.; Li, X.; Liu, H.; Li, P. Parameter Fuzzy Self-Adaptive Dynamic Window Approach for Local Path Planning of Wheeled Robot. IEEE Open J. Intell. Transp. Syst. 2022, 3, 1–6. [Google Scholar] [CrossRef]
- Dobrevski, M.; Skočaj, D. Dynamic Adaptive Dynamic Window Approach. IEEE Trans. Robot. 2024, 40, 3068–3081. [Google Scholar] [CrossRef]
- Hang, P.; Yan, Y.; Fu, X.; Chen, H.; Liu, Y. Research on local path planning of intelligent vehicle based on improved dynamic window approach. In Proceedings of the Third International Conference on Artificial Intelligence and Computer Engineering (ICAICE 2022), Wuhan, China, 11–13 November 2023; Volume 12610. [Google Scholar]
- Dai, X.; Xu, H.; Ma, H.; Ding, J.; Lai, Q. Dual closed loop AUV trajectory tracking control based on finite time and state observer. Math. Biosci. Eng. 2022, 19, 11086–11113. [Google Scholar] [CrossRef]
- Wang, R.; Wang, S.; Wang, Y.; Tang, C. Path following for a biomimetic underwater vehicle based on ADRC. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3519–3524. [Google Scholar] [CrossRef]
- Xiaoqiang, D.; Wenke, L. Non-global solution for visco-elastic dynamical system with nonlinear source term in control problem. Electron. Res. Arch. 2021, 29, 4087–4098. [Google Scholar]
- Wang, S.; Wang, Y.; Wei, Q.; Tan, M.; Yu, J. A Bio-Inspired Robot With Undulatory Fins and Its Control Methods. IEEE/ASME Trans. Mechatron. 2017, 22, 206–216. [Google Scholar] [CrossRef]
- Namgung, H. Local route planning for collision avoidance of maritime autonomous surface ships in compliance with COLREGs rules. Sustainability 2021, 14, 198. [Google Scholar] [CrossRef]
- Dai, X.; Han, J.; Lin, Q.; Tian, X. Anomalous pseudo-parabolic Kirchhoff-type dynamical model. Adv. Nonlinear Anal. 2022, 11, 503–534. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef]
- Yang, J.; Sacks, E. RRT path planner with 3DOF local planner. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; Volume 2006, pp. 145–149. [Google Scholar]
- Hu, Z.; Wang, X.; Zhang, J. Research on Dynamic Obstacle Avoidance Method of Mobile Robot based on Improved A* Algorithm and Dynamic Window Method. Eng. Lett. 2024, 32, 520–530. [Google Scholar]
- Zhu, X.; Yin, D.; Tang, J. A New Algorithm of Path Planning Based on Dynamic Window Approach. In Proceedings of the 2022 4th International Conference on Robotics, Intelligent Control and Artificial Intelligence, Guangzhou, China, 2–4 December 2022; pp. 1322–1326. [Google Scholar]
- Li, Y.; Zhu, Q. Local path planning based on improved dynamic window approach. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 4291–4295. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NO. | Initial Location | Direction | Moving Speed (m/s) |
|---|---|---|---|
| Obstacle 1 | 0.3 | ||
| Obstacle 2 | 0.4 | ||
| Obstacle 3 | 0.2 | ||
| Obstacle 4 | 0.5 | ||
| Obstacle 5 | 0.8 | ||
| Obstacle 6 | 0.1 | ||
| Obstacle 7 | 0.3 |
| Movement Pattern | Success Rate (%) | Average Safe Distance (m) | Average Response Time (s) |
|---|---|---|---|
| Linear Motion | 98.3 | 2.5 | 0.15 |
| Circular Motion | 95.7 | 2.3 | 0.18 |
| Random Walk | 92.1 | 2.1 | 0.21 |
| Group Movement | 90.5 | 1.9 | 0.25 |
| Parameter | Value |
|---|---|
| size of robot (length, width and height) (mm) | |
| underwater turning radius (mm) | 1218 |
| turning radius on land (mm) | 1623 |
| crossing ability (mm) | ≤430 |
| climbing ability () | ≤30° |
| Parameter | Value |
|---|---|
| map size (m) | |
| radius of danger zone (m) | |
| radius of comfort zone (m) | 3 |
| maximum number of iterations | 1000 |
| heading factor | 1 |
| safety factor | 1 |
| velocity factor | 1 |
| distance evaluation factor | 1 |
| linear velocity resolution (m/s) | |
| angular velocity resolution (rad/s) | |
| maximum linear velocity underwater/overland / (m/s) | |
| maximum angular velocity underwater/overland / (rad/s) | |
| maximum linear acceleration underwater/overland / (m/) (T) | |
| maximum angular acceleration underwater/overland / (rad/) | |
| iteration interval time (s) | |
| sliding window time (s) | 4 |
| gravitational coefficient | |
| expulsive force |
| Unreachable Target Simulation | Complex Terrain Traversal Simulation | Moving Obstacle Avoidance Simulation | |||||||
|---|---|---|---|---|---|---|---|---|---|
| IDWA | DWA | APF | IDWA | DWA | APF | IDWA | DWA | APF | |
| Completion of tasks | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes |
| Iteration times | 178 | 500 | 500 | 413 | 526 | 1000 | 193 | 288 | 251 |
| Task Completion Time (s) | 26.7 | \ | \ | 61.95 | 78.9 | \ | 28.95 | 43.2 | 37.65 |
| Algorithm Runtime (s) | 8.12 | 21.92 | 16.07 | 15.31 | 22.55 | 30.29 | 7.28 | 11.25 | 8.88 |
| Path Length (m) | 15.85 | \ | \ | 26.02 | 29.89 | \ | 21.61 | 24.22 | 27.91 |
| Longitude | Latitude | Height from Sea Level (m) | |
|---|---|---|---|
| Starting Point | 119.373284 E | 32.119533 N | −2.0 |
| End Point | 119.373239 E | 32.119601 N | 4.0 |
| Local Target Point 1 | 119.373325 E | 32.119549 N | −2.5 |
| Local Target Point 2 | 119.373335 E | 32.119591 N | −3.0 |
| Local Target Point 3 | 119.373295 E | 32.119622 N | −3.5 |
| Virtual Obstacle 1 | 119.373146 E | 32.119495 N | −2.3 |
| Virtual Obstacle 2 | 119.373201 E | 32.119457 N | −2.7 |
| Virtual Obstacle 3 | 119.373192 E | 32.119562 N | −4.0 |
| Virtual Obstacle 4 | 119.373237 E | 32.119609 N | −2.0 |
| Virtual Obstacle 5 | 119.373182 E | 32.119687 N | −2.9 |
| Virtual Obstacle 6 | 119.373098 E | 32.119677 N | −4.1 |
| Path Segment | Length (m) | Time (s) |
|---|---|---|
| Start–Local Target Point 1 | 9.85 | 14.9 |
| Local Target Point 1–Local Target Point 2 | 13.23 | 18.6 |
| Local Target Point 2–Local Target Point 3 | 12.63 | 18.0 |
| Local Target Point 3–End | 15.59 | 21.6 |
| Total | 51.30 | 73.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, X.; Liu, C.; Lai, Q.; Huang, X.; Zeng, Q.; Liu, M. The Local Path Planning Algorithm for Amphibious Robots Based on an Improved Dynamic Window Approach. J. Mar. Sci. Eng. 2025, 13, 399. https://doi.org/10.3390/jmse13030399
Dai X, Liu C, Lai Q, Huang X, Zeng Q, Liu M. The Local Path Planning Algorithm for Amphibious Robots Based on an Improved Dynamic Window Approach. Journal of Marine Science and Engineering. 2025; 13(3):399. https://doi.org/10.3390/jmse13030399
Chicago/Turabian StyleDai, Xiaoqiang, Chengye Liu, Qiang Lai, Xin Huang, Qingjun Zeng, and Ming Liu. 2025. "The Local Path Planning Algorithm for Amphibious Robots Based on an Improved Dynamic Window Approach" Journal of Marine Science and Engineering 13, no. 3: 399. https://doi.org/10.3390/jmse13030399
APA StyleDai, X., Liu, C., Lai, Q., Huang, X., Zeng, Q., & Liu, M. (2025). The Local Path Planning Algorithm for Amphibious Robots Based on an Improved Dynamic Window Approach. Journal of Marine Science and Engineering, 13(3), 399. https://doi.org/10.3390/jmse13030399