Building on the theoretical foundation, the subsequent section is dedicated to numerical simulations and subsequent analyses aimed at substantiating the efficacy of the proposed method. The primary objective of these simulations is to evaluate the practical viability and effectiveness of the Gaussian-process-based MPC approach in achieving precise motion control and obstacle avoidance for AUVs. A meticulous examination of the obtained results will yield valuable insights, further validating the method’s suitability across various underwater environments. Such rigorous scrutiny is essential for establishing the method’s suitability and drawing scientifically sound conclusions regarding its performance in various scenarios.
Given the complexities of the underwater environment and the operational demands placed on AUVs, the attainment of robust motion control capabilities and effective obstacle avoidance capabilities remains of paramount importance. In this section, we rigorously assess the effectiveness of the proposed method in facilitating AUV obstacle avoidance through comprehensive simulations. The initial part of the analysis entails the realization of trajectory tracking via 6-DOF AUV control, providing a validation of the feasibility and control accuracy of the Gaussian-process-based MPC approach. Subsequently, in the second and third parts, the method’s obstacle avoidance prowess is investigated in both static and dynamic obstacles, employing the underactuated AUV horizontal plane model. Finally, the fourth part explores obstacle avoidance simulations for the underactuated AUV model in a three-dimensional space.
4.1. Trajectory Tracking Analysis
Trajectory tracking constitutes a critical component of AUV control systems, enabling precise navigation along predefined paths or trajectories within the challenging underwater environment. Achieving accurate trajectory tracking is vital for mission success, as it ensures the AUV can effectively execute its intended tasks while efficiently adapting to environmental conditions and circumventing obstacles. In this section, our focus is specifically directed towards trajectory tracking within the context of AUV control. Our primary objective is to scrutinize the practicality and control precision of the Gaussian-process-based MPC approach in the realm of trajectory tracking. We endeavor to evaluate the performance of the proposed method concerning the attainment of precise trajectory tracking under varying operational scenarios.
The simulation results will provide valuable insights into the effectiveness and robustness of the Gaussian-process-based MPC approach, contributing to the advancement of AUV motion control methodologies and bolstering the overall trajectory tracking capabilities of AUVs.
In this trajectory tracking simulation task, the acceleration is utilized as the six-dimensional input
to control the motion of the 6-DOF AUV. The sampling period
is set to 0.1 s, and the prediction step
is 20. These parameters determine the frequency at which control actions are updated and the number of future steps that factor into trajectory prediction. To maintain a structured and controlled environment during simulations, the constraint space for the input
and state
of the AUV is defined as follows:
where
indicates that no constraints have been applied to this dimension. To initiate the simulation, the weight matrices associated with the cost function are established as follows:
For the target trajectory in this simulation, we opted for a well-established trajectory known as the “spiral trajectory”. This trajectory that was used is defined as follows:
The reference trajectory, denoted as , represents the target positions and orientations for an AUV along the , , and directions. Each component of corresponds to a specific dimension, defining the desired state for the AUV’s motion. In cases where no explicit reference value is specified for a particular direction, the default value is assigned as zero, indicating the absence of a specific target in that dimension. Moreover, the initial state of the AUV is defined as and the input values are set as .
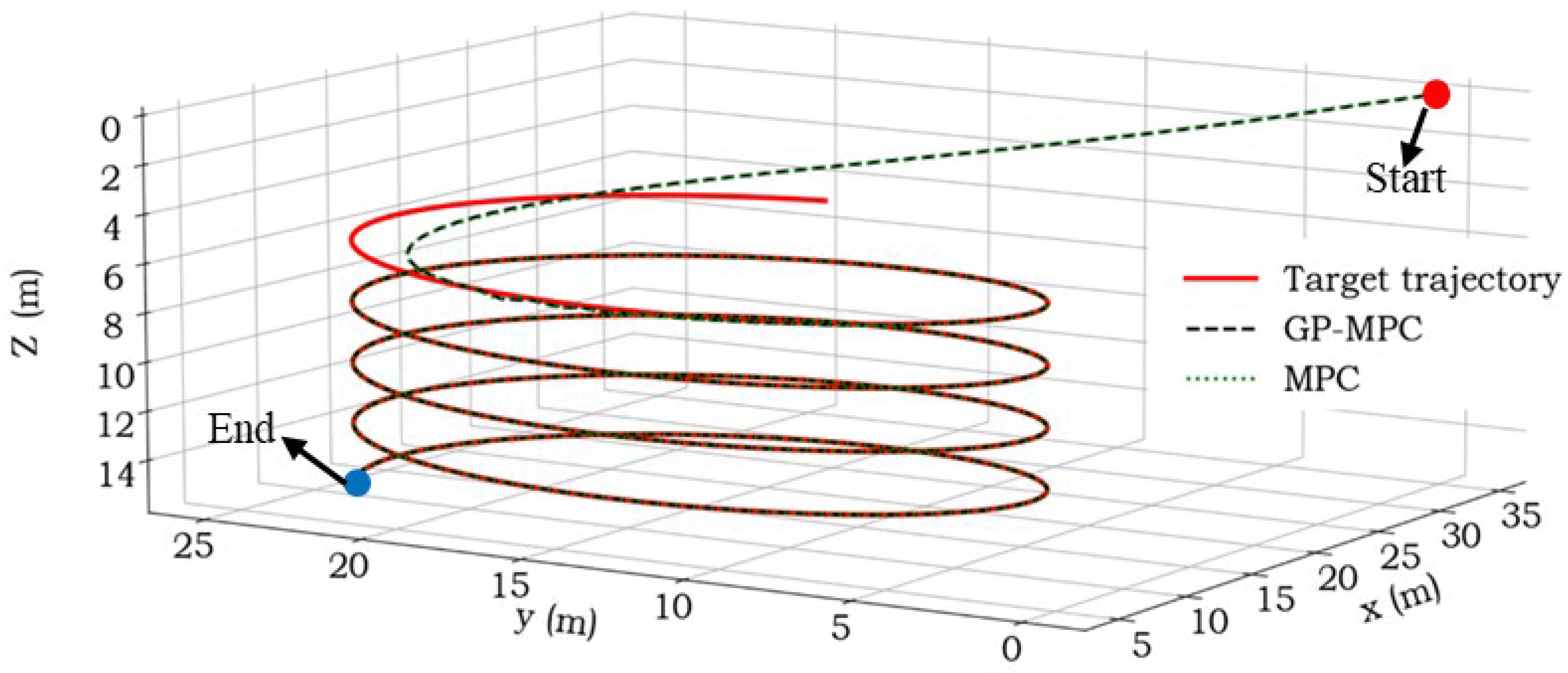
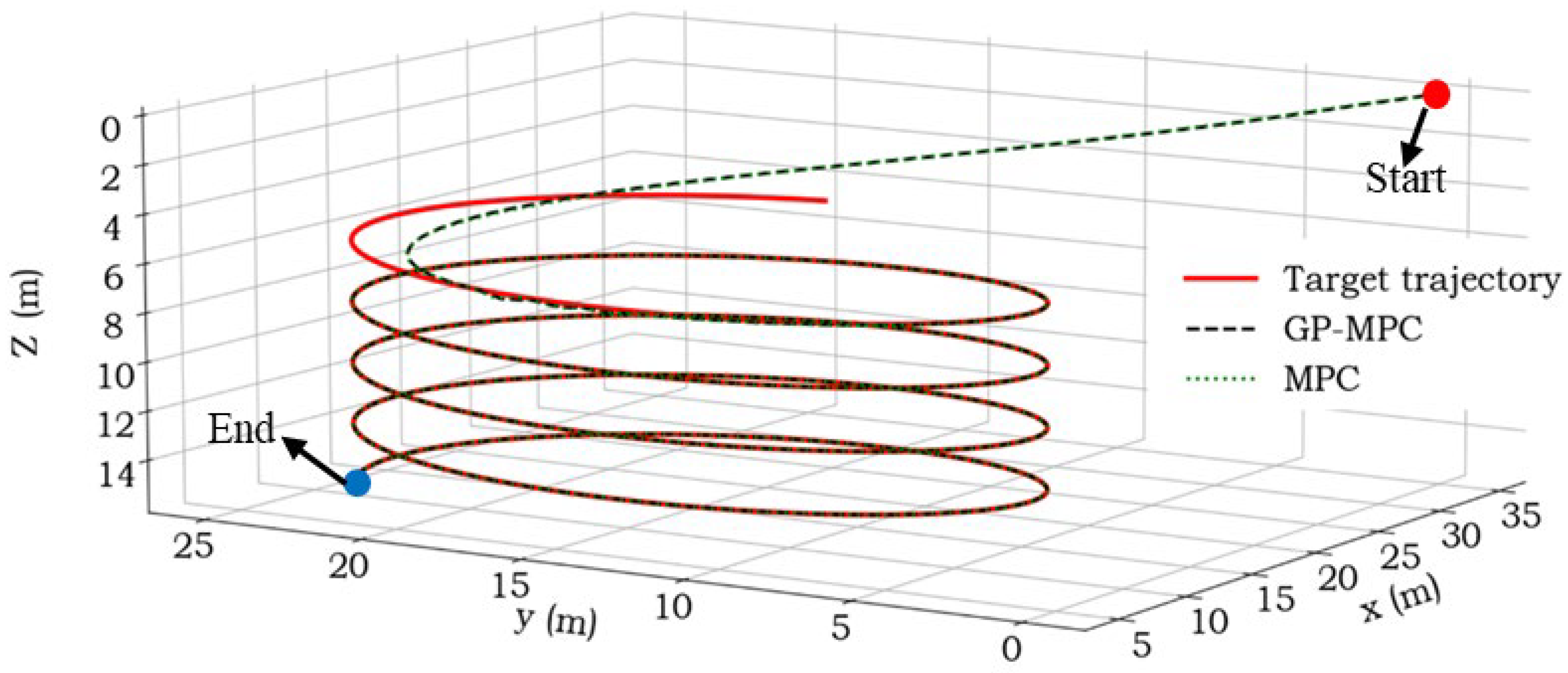
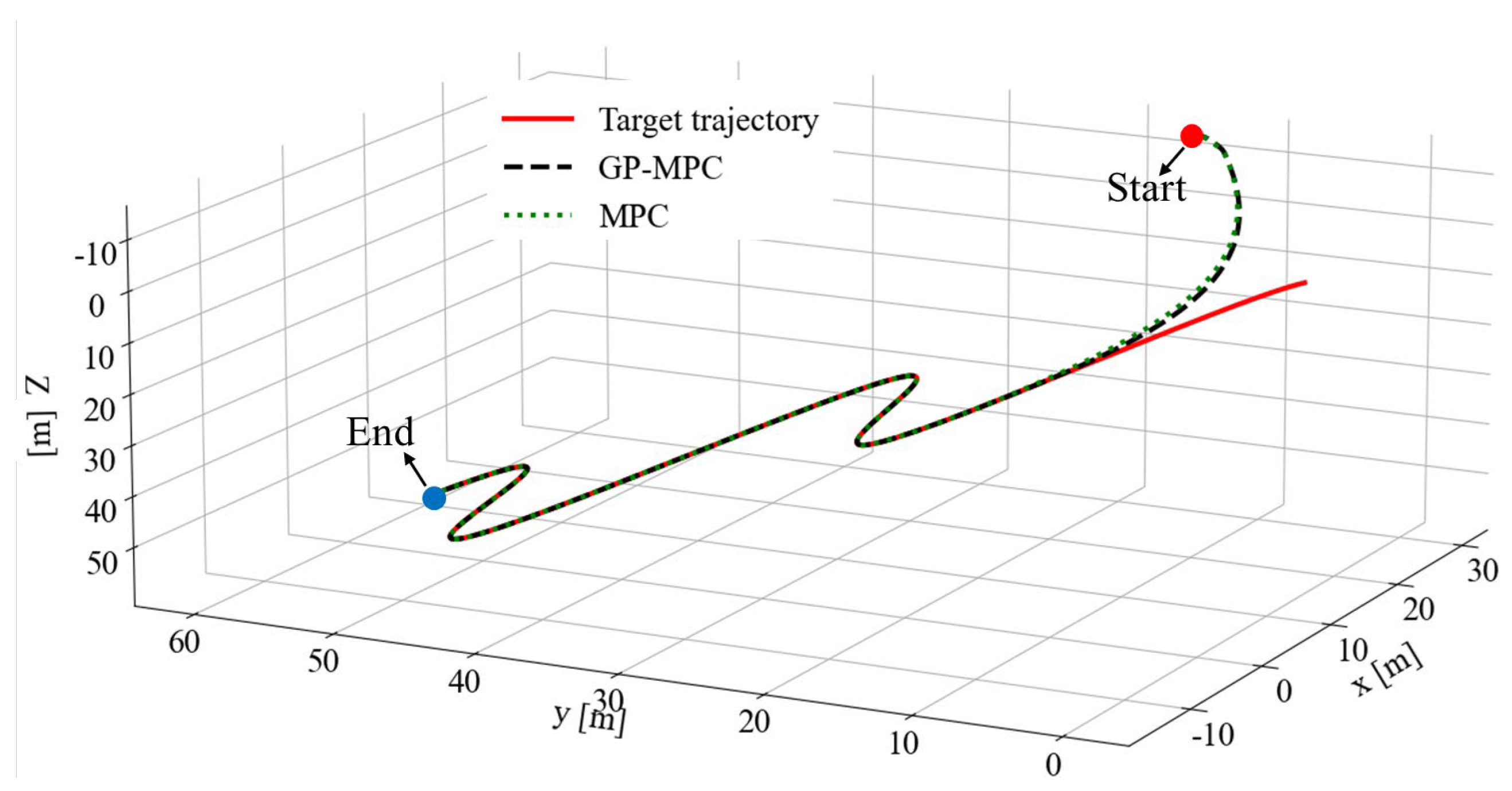
The trajectory tracking task was performed using the proposed algorithm, which leveraged available data and control inputs to guide the AUV’s motion, ensuring the precise tracking of the desired trajectory. The simulation results, depicted in
Figure 3, unequivocally demonstrate the algorithm’s effectiveness in achieving accurate trajectory tracking. The red curve in
Figure 3 represents the target trajectory, while the black dashed curve illustrates the actual motion trajectory of the AUV with Gaussian-process-based MPC, and the green dotted curve represents the MPC method. The remarkable alignment between these two curves demonstrates the algorithm’s ability to steer the AUV precisely along the intended path.
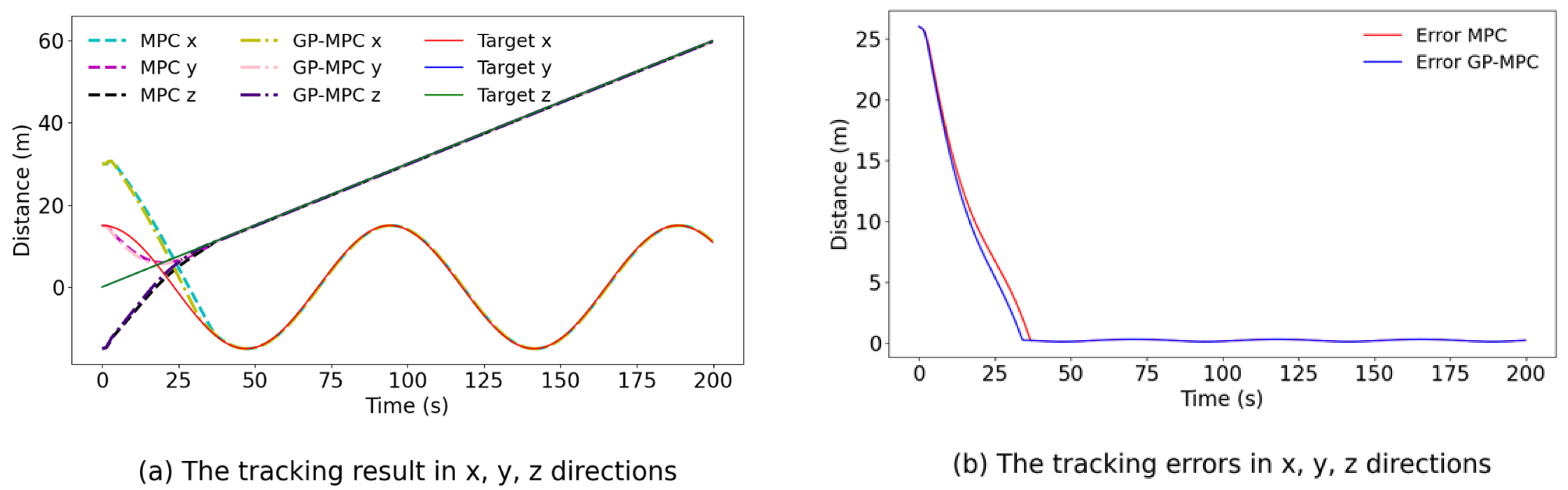
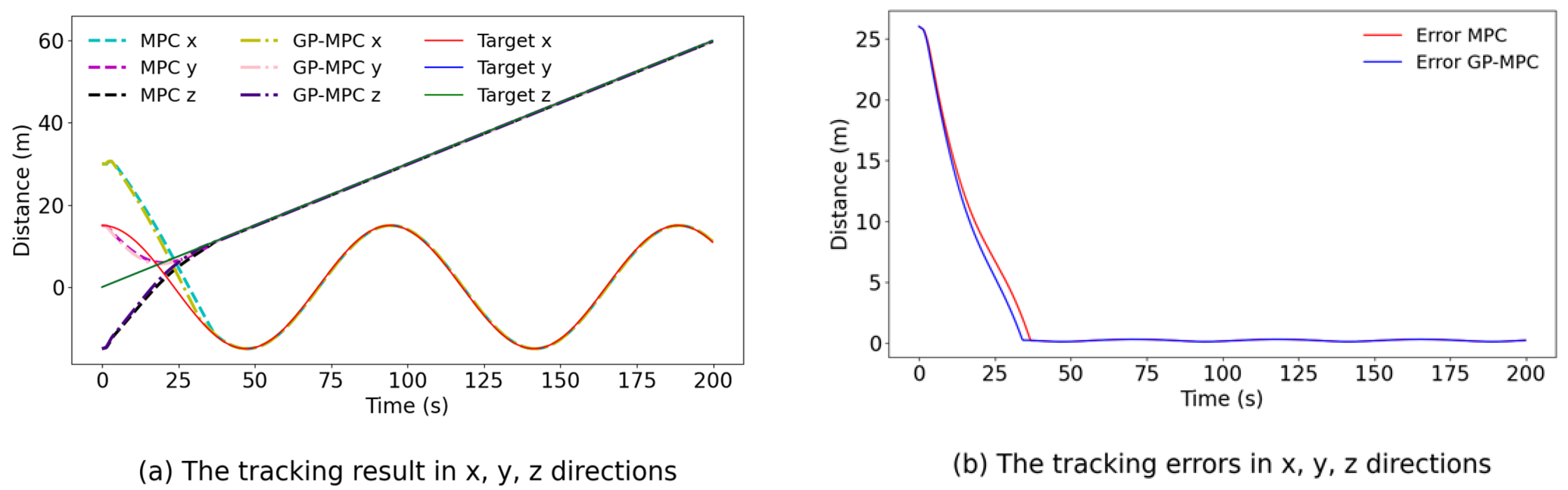
To delve deeper into the results,
Figure 4 presents a comprehensive view of the tracking outcomes and errors in the
,
, and
directions over time during the simulation.
Figure 4a displays the target and simulated trajectories. Here, the red, blue, and green curves signify the target trajectory in the
,
, and
directions, respectively. The trajectories in the
,
, and
directions of Gaussian-process-based MPC trajectories are represented by the red, blue, and green curves, respectively. The yellow, pink and purple dashed curves represent the trajectories of the MPC method. From
Figure 4, it is evident that the MPC and Gaussian-process-based MPC can effectively approach the target trajectory when their initial positions differ, and subsequently form a stable tracking effect. It can be observed from the approach curve during the first 20 s shown in subgraph (a) and the error curve of subgraph (b) that Gaussian-process-based MPC can approach the target curve more stably and quickly. After 20 s, the average tracking error of Gaussian-process-based MPC is
, while that of MPC is
. Overall, the results demonstrate the effectiveness and accuracy of this algorithm in maintaining good trajectory tracking performance.
The sinusoidal trajectory presents a complex and dynamic motion pattern, and this type of trajectory can be defined as follows:
The initial state of the AUV is defined as
.
Figure 5 and
Figure 6, respectively, show the spatial trajectory tracking results and the differences in the
,
and
components. After 50 s, the average tracking error of Gaussian-process-based MPC is
, while that of MPC is
. Overall, the sinusoidal trajectory tracking presents substantial challenges for the AUV due to variations in curvature and speed. Compared to the spiral curve, the tracking error of each control method increases, but can remain within a lower range after stabilization.
In summary, the algorithm has successfully demonstrated its ability to enable the AUV to meticulously track the desired trajectory, as is evident from the close alignment between the actual and desired trajectories. Furthermore, the analysis of tracking errors further confirms the algorithm’s capacity to mitigate the initial discrepancies and sustain an accurate tracking throughout the simulation. These findings highlight the algorithm’s potential to enhance trajectory control and facilitate the dependable motion of AUVs in real-world scenarios.
4.2. Avoidance of Static Obstacles on the Horizontal Plane
To validate the Gaussian-process-based MPC’s ability to handle external constraints, a series of obstacle avoidance experiments for the AUV were meticulously designed and simulated. In this comprehensive assessment of the control method’s performance, obstacles were strategically positioned within the positional space. It is important to note that, during the simulation, the AUV dynamically selects obstacles for state observation based on predefined obstacle selection rules, while disregarding others. This approach optimizes the AUV’s interactions with obstacles, enabling an in-depth study of its obstacle avoidance capabilities. The simulation encompasses gradual modifications to the size and position of the obstacles to comprehensively test the AUV’s ability to navigate around them. The selected shape for the obstacles is the conventional elliptical form, and their specific parameters are presented in
Table 2.
The first column of
Table 2 denotes the obstacle number, the second column provides the Cartesian coordinates of each obstacle, and the third column specifies the size of each obstacle. The expected state for obstacle avoidance is denoted as
. The initial state and input values of the AUV are set as
and
, respectively. Additionally, the obstacle selection parameters are set as
and
. The simulation is conducted with a sampling period
and the prediction step
.
In the simulation experiments, specific constraints were imposed on the input
and state space
of the AUV to ensure safe and controlled motion. The constraints were rigorously defined as follows:
The weight matrices of the
function are defined as follows:
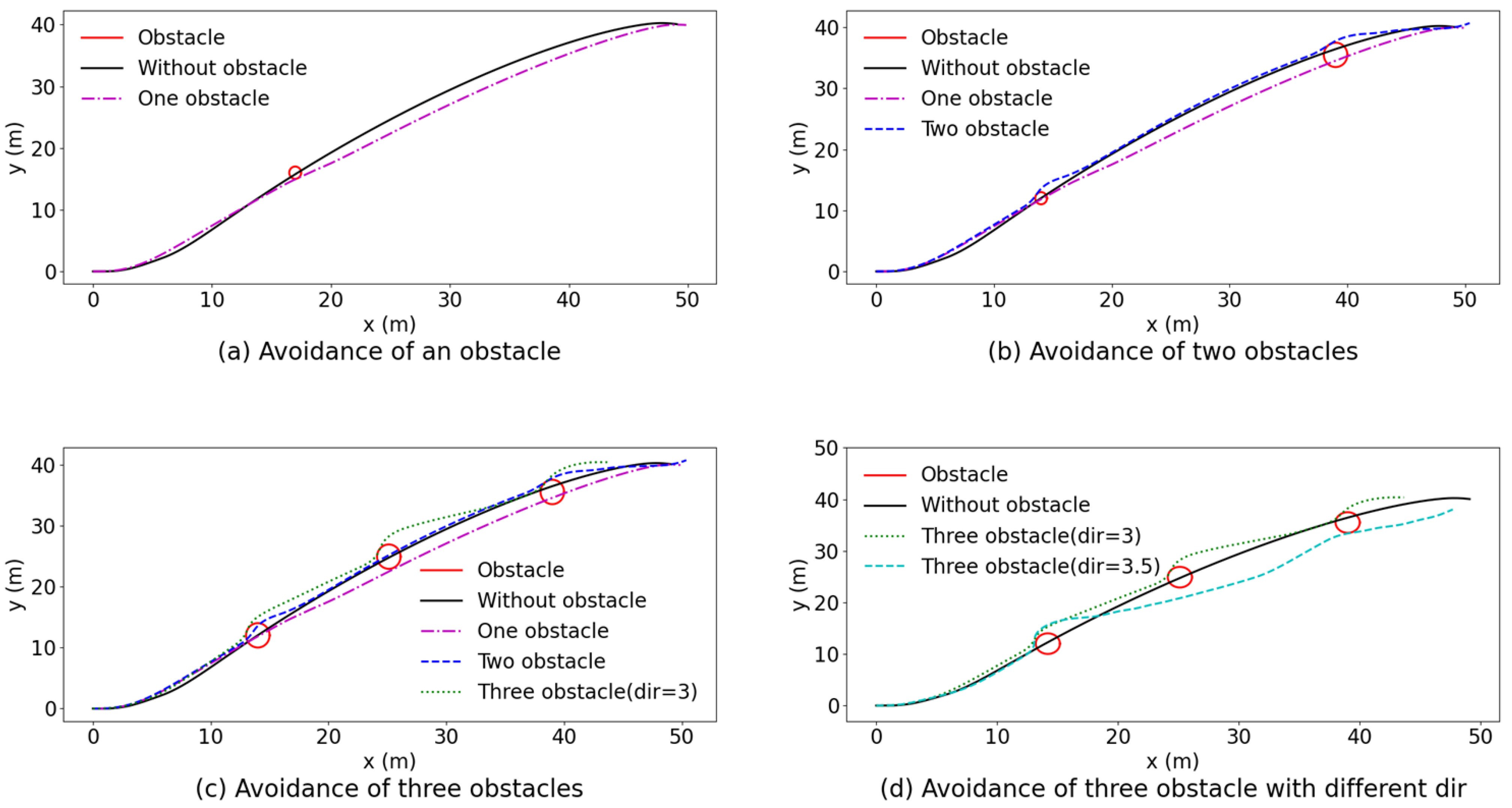
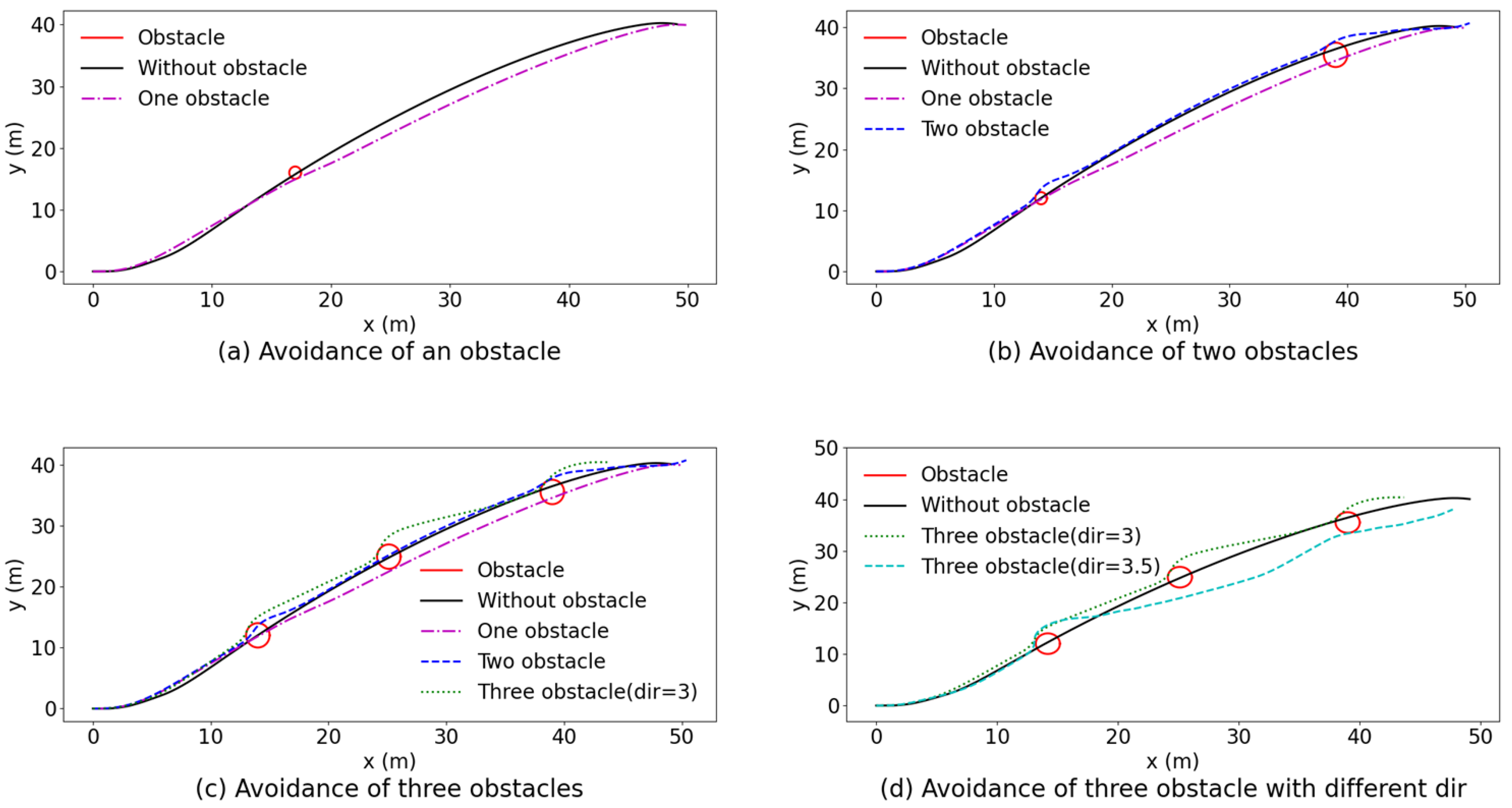
Figure 7 provides a comprehensive illustration of the simulation results, showcasing the remarkable obstacle avoidance capabilities of the AUV. The figure is thoughtfully divided into several subgraphs, with each offering unique insights into the AUV’s motion trajectories as it adeptly navigates around various obstacles.
Figure 7a depicts the motion trajectory of the AUV while avoiding Obs. 1. This subgraph highlights the AUV’s ability to navigate around a single obstacle.
Figure 7b illustrates the AUV’s trajectory while avoiding Obs. 2 and Obs. 3 simultaneously. The positioning of Obs. 2 at the intersection of two curves from
Figure 7a allows for a rigorous evaluation of the AUV’s obstacle avoidance capabilities when encountering multiple obstacles.
Figure 7c,d present the trajectories of the AUV while avoiding Obs. 3, Obs. 4, and Obs. 5. Throughout the simulation process, the parameters of the obstacles are intelligently configured based on insights gained from prior obstacle avoidance simulations. Notably, in
Figure 7b, Obs. 2 is astutely positioned at the convergence point of the trajectories from
Figure 7a. This deliberate arrangement is designed to challenge the AUV’s obstacle avoidance prowess by creating an environment where it encounters multiple obstacles simultaneously.
In
Figure 7, the red ellipses represent the obstacles that need to be avoided, while the black curves represent the reference trajectory in the absence of obstacles. The magenta dash-dotted curves and blue dashed curves elegantly signify the AUV’s avoidance of one obstacle and two obstacles, respectively. Meanwhile, the green dotted curves and the cyan dashed curve represent the AUV’s impressive ability to avoid three obstacles, each with distinct values of
. These findings are a testament to the AUV’s exceptional obstacle avoidance performance, with each subgraph showcasing its agility and precision in various challenging scenarios.
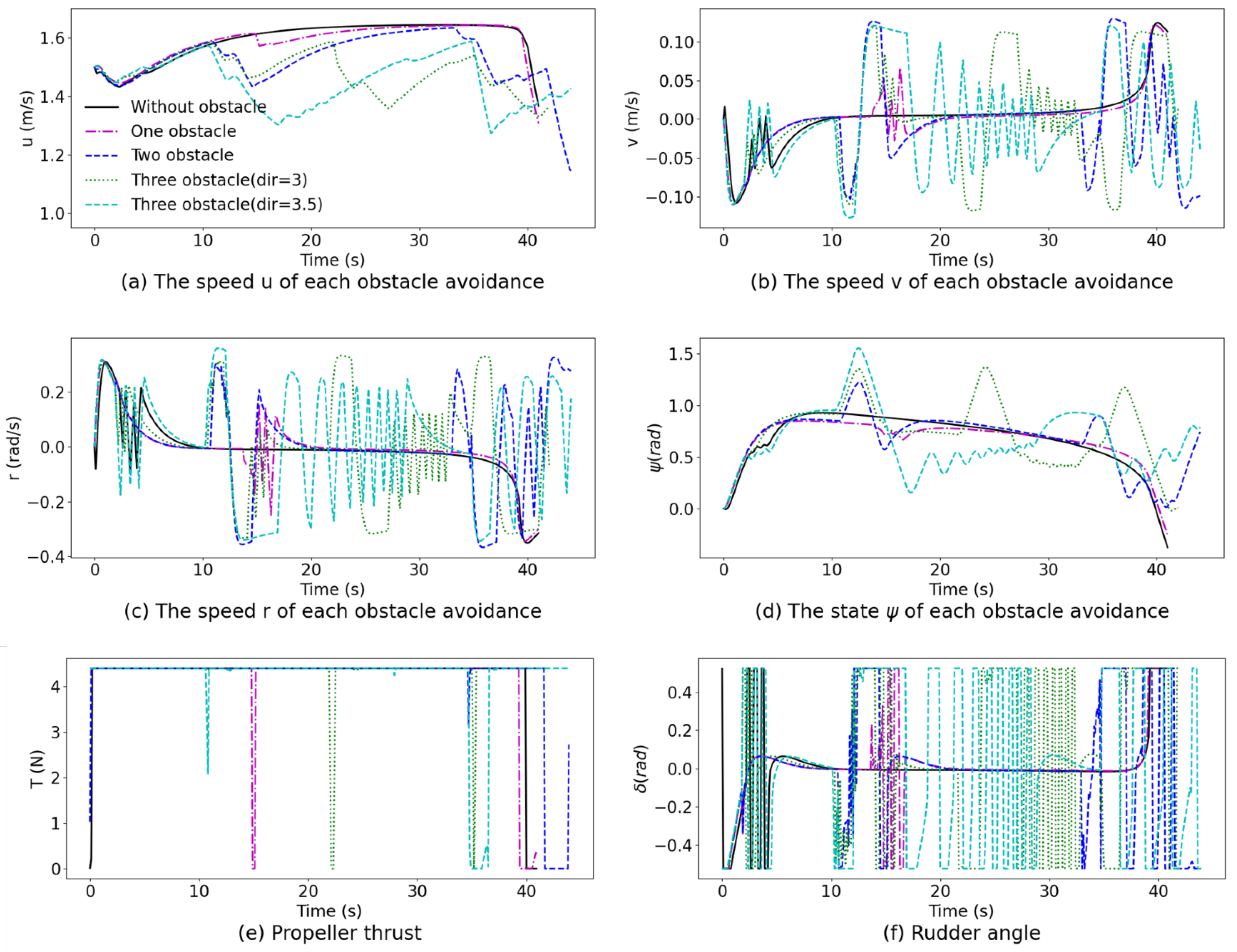
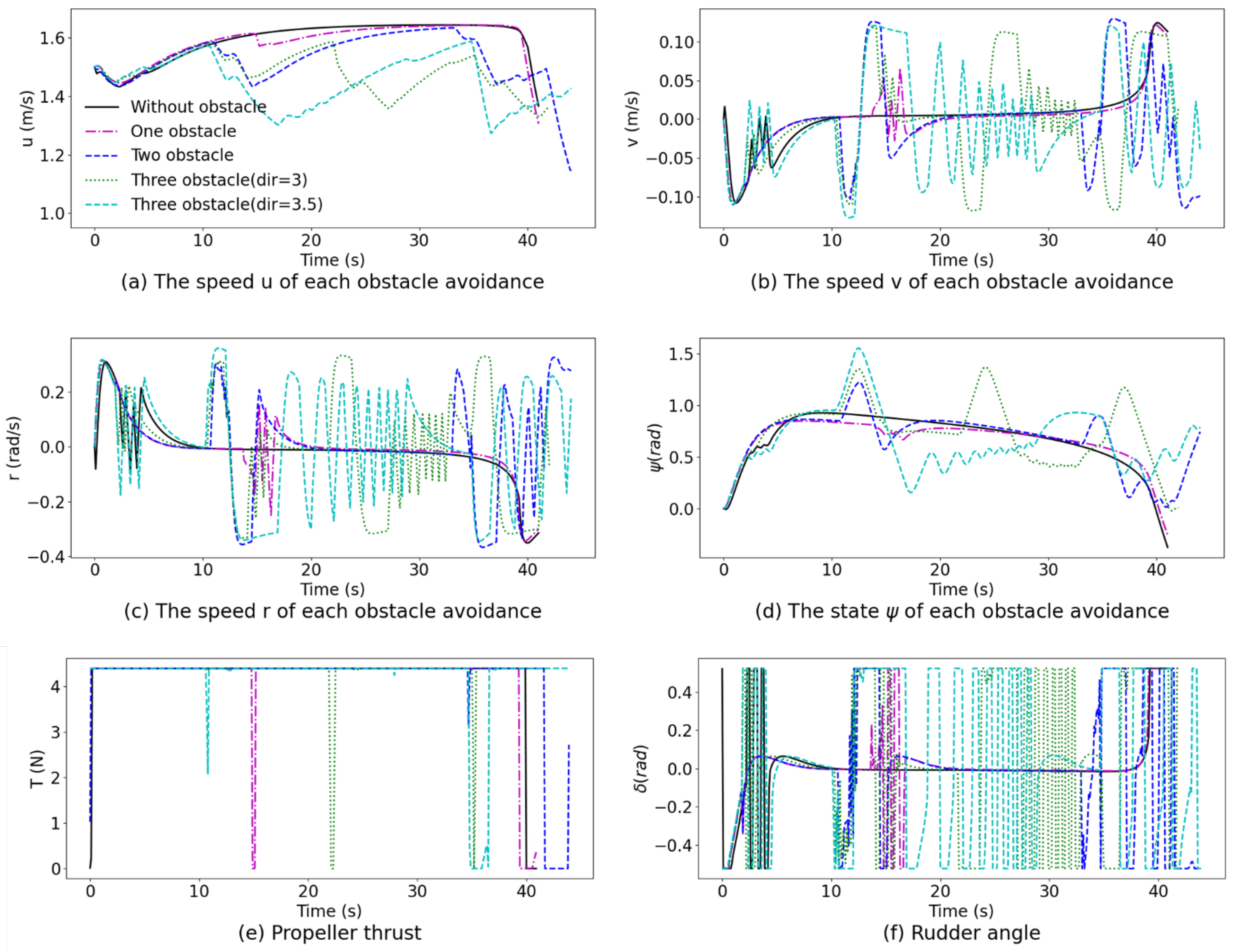
Figure 8 illustrates the translational velocities
and
, the rotational velocity
, the Euler angle
, and the input
associated with each obstacle avoidance result. The key insights conveyed by the various curves, represented by distinct line types and colors in this figure, align with the interpretations presented in
Figure 7.
From the obstacle avoidance results of the two and three obstacles presented in
Figure 7b,c, and the corresponding input data displayed in
Figure 8, a clear pattern emerges. During the AUV obstacle avoidance task, the effective strategy revolves around setting the rudder angle to its maximum value as the AUV approaches an obstacle. This proactive measure ensures a safe distance is maintained from the obstacle during avoidance. Once the obstacle avoidance task is successfully accomplished, the AUV smoothly transitions back towards the reference trajectory in the absence of obstacles.
Subsequently, it becomes apparent that different obstacle avoidance results can be achieved by adjusting the observation minimum distance
, as illustrated in
Figure 7d. When
is set to 3 m, the obstacle avoidance trajectory passes through Obs. 5 from the front. An in-depth analysis of this trajectory reveals a key behavior—the AUV endeavors to realign itself with the reference curve once it escapes the influence range of the first obstacle. This realignment is most notable between the second and third obstacles, where the AUV’s path closely aligns with the black reference trajectory. However, due to the short distance between the first and second obstacles, the AUV chooses to maintain a safe distance rather than immediately approach the reference trajectory to satisfy the obstacle avoidance requirements.
On the other hand, when
is adjusted to 3.5 m, while the AUV remains focused on the first obstacle, this extends over a more prolonged duration, allowing it to approach the reference trajectory with a lower yaw angle after successfully circumventing the obstacle. This observation is distinctly supported by
Figure 8d, where the minimum value of
is 0.1556 rad between 10 and 20 s. As the AUV shifts its focus towards the second obstacle, the controller efficiently adjusts the AUV’s trajectory based on its current state, enabling it to pass below Obs. 5 with precision. These findings serve as a testament to the versatility and adaptability of the proposed method. By strategically adjusting the observation minimum distance
, the AUV can navigate complex environments with agility and ensure the safe avoidance of obstacles while maintaining trajectory accuracy.
4.3. Avoidance of Dynamic Obstacles on Horizontal Plane
While static obstacle avoidance remains a pivotal aspect of AUV control, it is imperative to recognize the equal significance of dynamic obstacle avoidance in real-world applications. In the previous sections, we delved into our approach for static obstacle avoidance. Now, we shift our focus to dynamic obstacle scenarios, building upon our prior insights. To investigate the obstacle avoidance capabilities of the proposed method in an environment containing dynamic obstacles, a new series of simulation tests has been formulated, extending from the insights gained through the previous examination of static obstacles. To further bolster the maneuverability of the AUV, an expansion was made to the range of controllable rudder angles. It is imperative to underscore that the constraints governing the state space remain unaltered, preserving the experimental setup’s consistency. However, certain adjustments were introduced to the input constraints, which are delineated as follows:
In the context of dynamic obstacle avoidance, the obstacles selected for simulation in
Section 4.2 are denoted as Obs. 3, Obs. 4, and Obs. 5. The coordinate and size parameters of these obstacles remain consistent with the previous simulations, with the introduction of velocity parameters as an additional factor, as outlined in
Table 3. The incorporation of dynamic obstacles serves the purpose of simulating real-world scenarios more faithfully, where obstacles are not stationary but in motion. To simulate the movement of dynamic obstacles, a criterion is established whereby an observed obstacle initiates its motion when the distance between the AUV and the obstacle falls below a prescribed threshold, referred to as
. The motion of the obstacle ceases once the AUV successfully navigates past it. By implementing this approach, a dynamic and interactive environment is created, wherein the obstacles respond dynamically to the presence and actions of the AUV. For subsequent simulation tests, the values of
and
are chosen as parameter settings. These values are thoughtfully chosen to establish a suitable distance threshold for initiating and terminating obstacle motion, while maintaining a safe distance during the avoidance process. The primary objective of these simulations is to evaluate the effectiveness and adaptability of the proposed method in addressing real-world scenarios where obstacles are in motion.
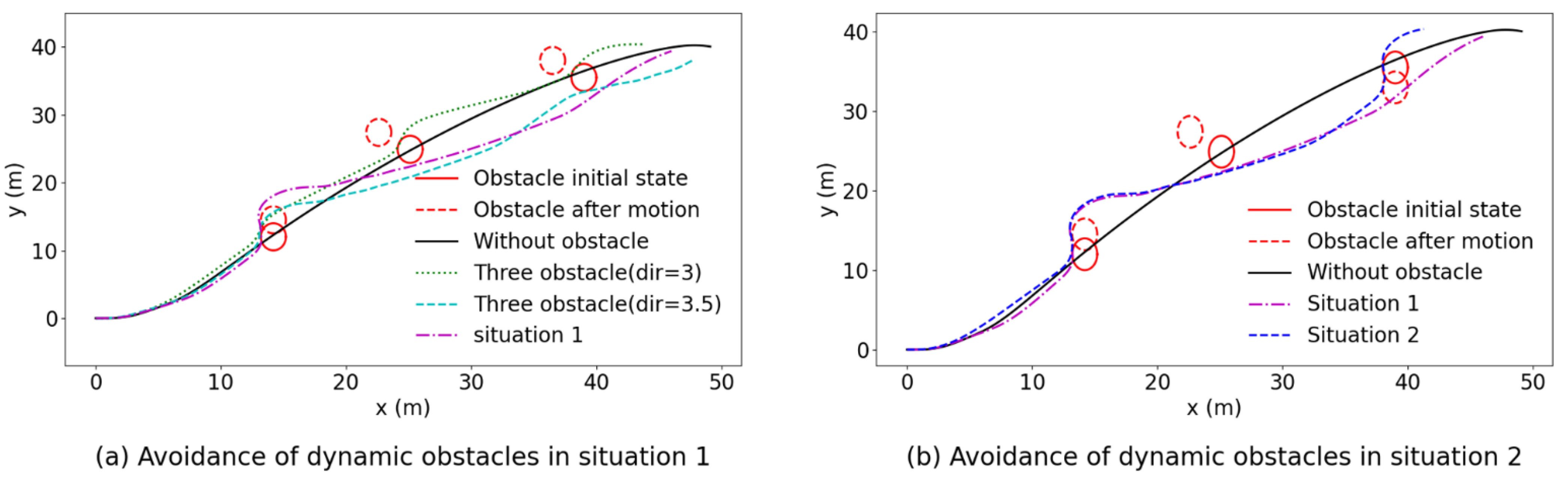
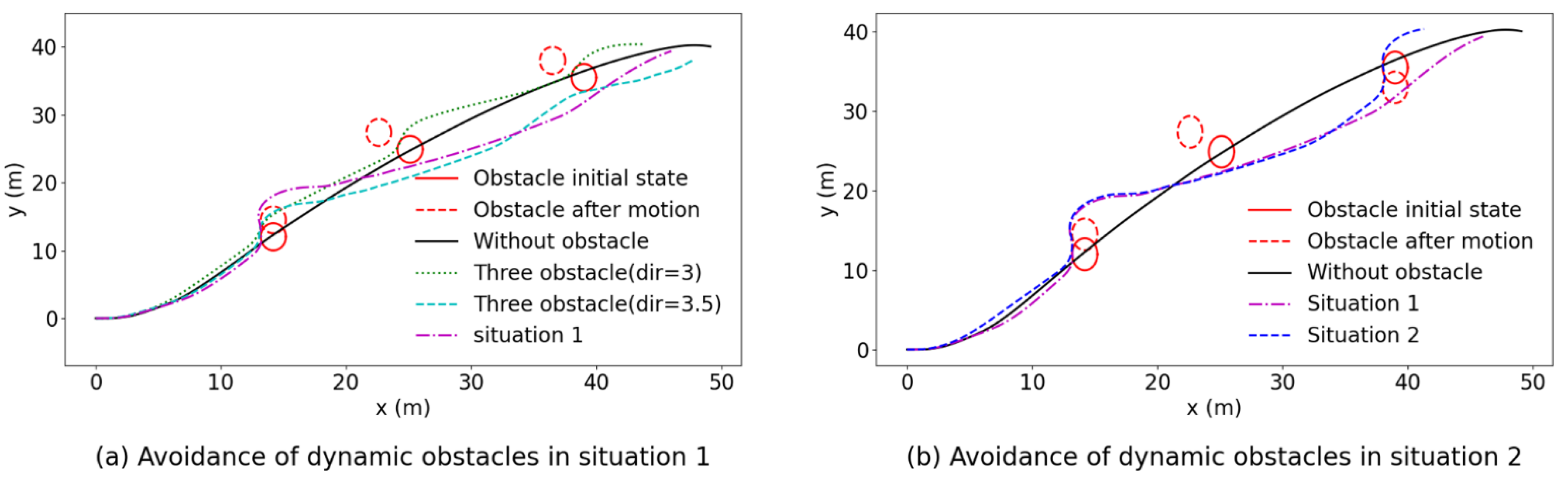
The trajectories of AUV obstacle avoidance under the influence of two types of dynamic obstacles are depicted in
Figure 9. In this figure, the red solid ellipses represent the initial position of each dynamic obstacle, while the dashed ellipses denote its position after the movement has ceased. The green dotted curves and cyan dashed curve illustrate the AUV’s avoidance of the three static obstacles discussed in
Section 4.2. Furthermore, the magenta dash-dotted curves and blue dashed curves represent the AUV’s avoidance trajectories when confronted with dynamic obstacles in their respective situations.
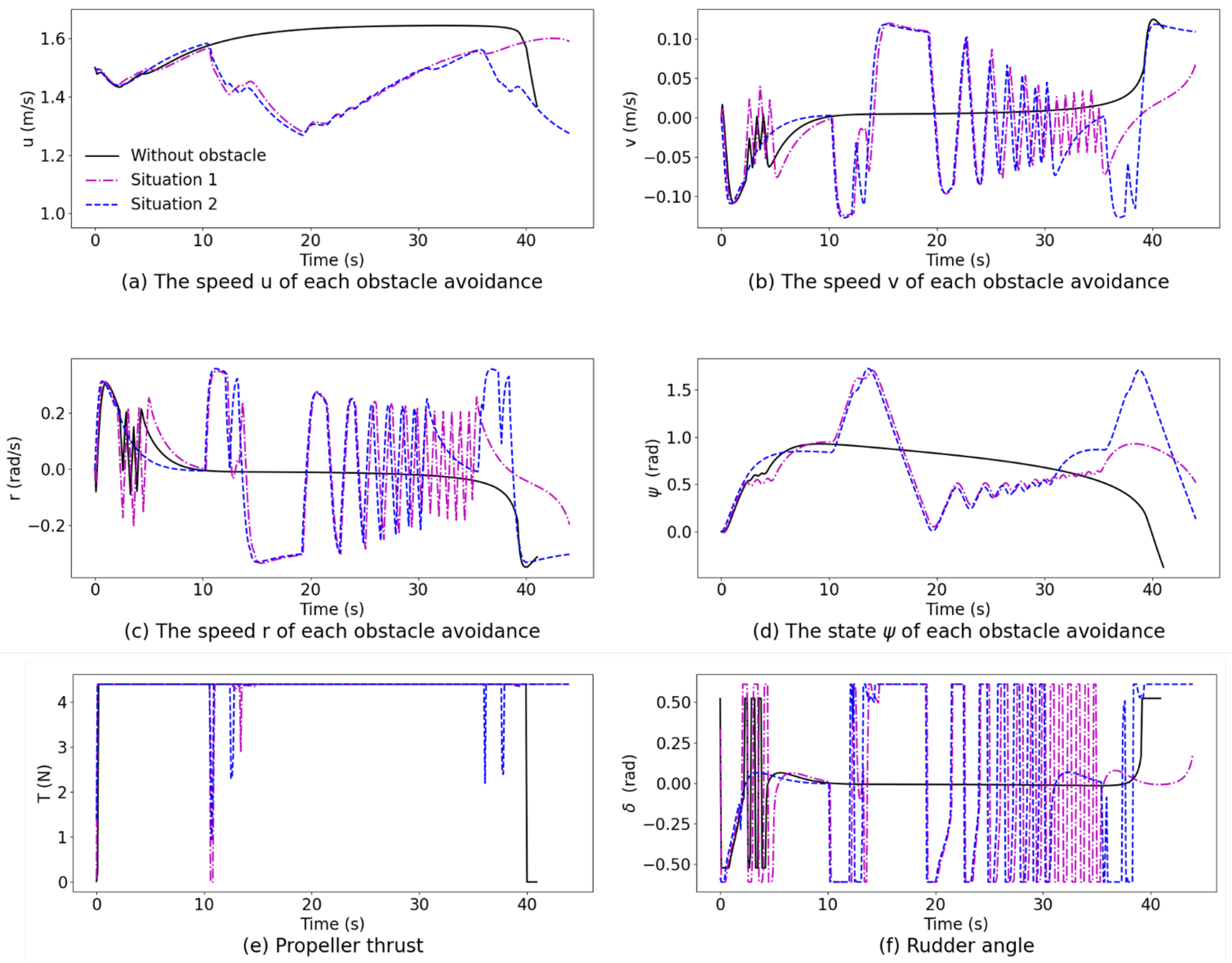
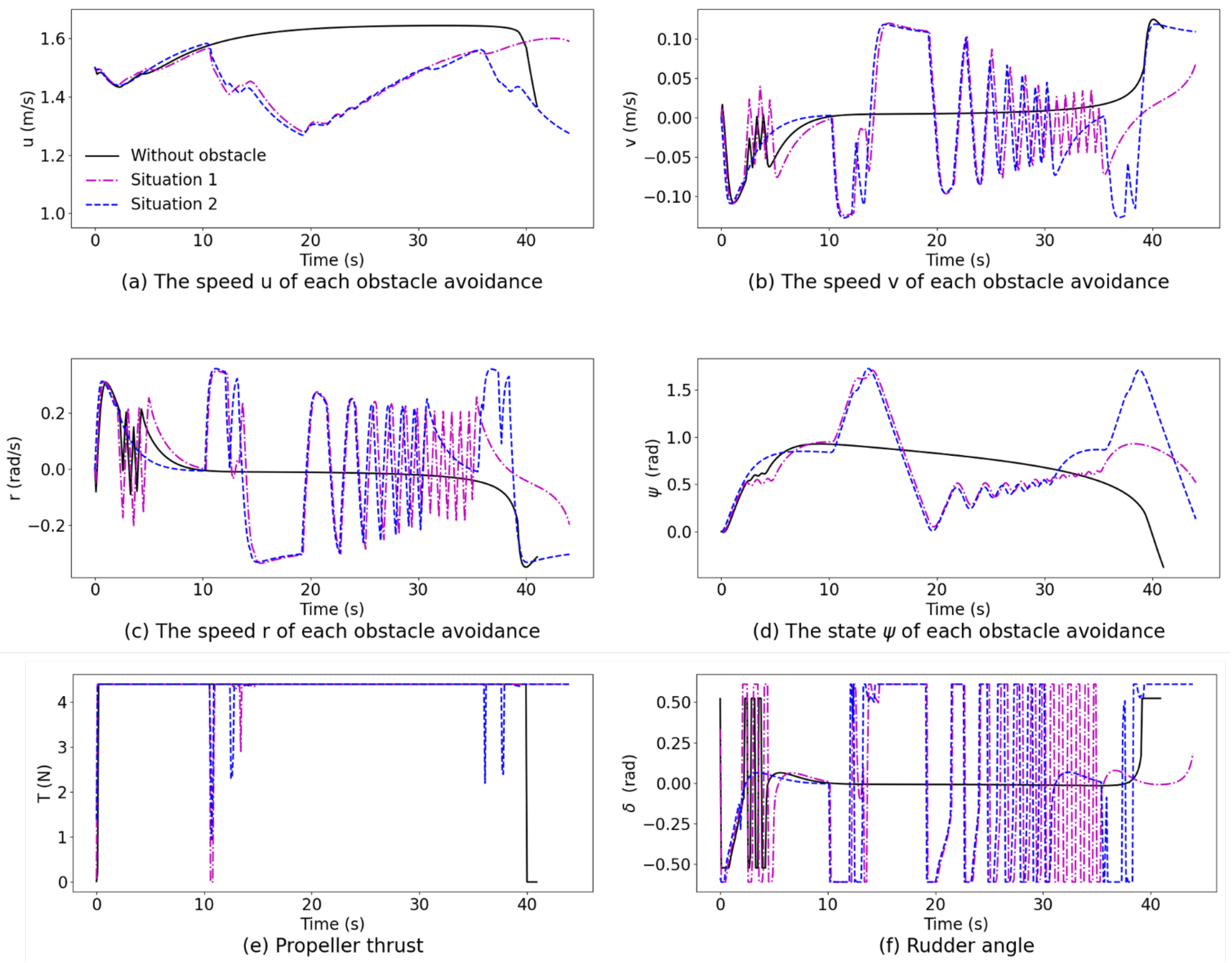
Figure 10 provides a comprehensive visualization of the translational velocities
and
, rotational velocity
, Euler angle
, and input
for each obstacle avoidance result. An analysis of the motion trajectories in both situations reveals that the AUV follows a similar trajectory while avoiding the first two obstacles. The curves between 10 s and 30 s in each subgraph of
Figure 10 demonstrate the similarities in velocity, state, and input patterns during this phase. However, a noteworthy distinction emerges in the approach adopted by the AUV when confronted with the last obstacle, which exhibits a different movement direction. This disparity is clearly evident in
Figure 10d. Specifically, for situation 2, two distinct peaks of
can be observed, measuring
and
, respectively.
These simulation results highlight the adaptability of the proposed obstacle avoidance approach when dealing with dynamic obstacles. The AUV consistently performs well in avoiding the first two obstacles, with minimal deviations in trajectory, velocity, state, and input. However, the distinct movement direction of the final obstacle necessitates a unique obstacle avoidance strategy, resulting in variations in the AUV’s trajectory and ψ values. These results emphasize the effectiveness of the proposed method in dynamically navigating environments, successfully avoiding obstacles while maintaining control over the AUV’s motion.
4.4. Obstacle Avoidance in Three-Dimensional Space
Given the paramount importance of precise and secure navigation in underwater environments, particularly in mission-critical tasks such as pipeline inspection, underwater construction, and environmental monitoring, the demand for three-dimensional obstacle avoidance capabilities becomes increasingly apparent. To further enhance the obstacle avoidance capabilities of underactuated AUVs powered by fins and rudders, this section aims to extend the investigation into the effectiveness of the proposed method in the realm of three-dimensional space. Navigating obstacles in three dimensions presents distinctive challenges and offers substantial real-world applications. By expanding the scope of our research to encompass three-dimensional scenarios, valuable insights can be gained into the AUV’s ability to navigate complex underwater environments while avoiding obstacles. Furthermore, conducting research on three-dimensional obstacle avoidance is crucial for enhancing the safety and operational efficiency of autonomous underwater systems. Numerous critical underwater missions require precise and reliable navigation in three-dimensional space, such as the inspection of pipelines, underwater construction endeavors, and rigorous environmental monitoring. By enabling AUVs to autonomously navigate and avoid obstacles in three dimensions, the proposed method has the potential to significantly improve the success and accuracy of such missions, while concurrently curtailing the risk of collisions or harm to delicate underwater structures.
In this study, we delve into the realm of three-dimensional space to scrutinize the efficacy of obstacle avoidance using an underactuated AUV outfitted with both fins
and rudders
, and the input becomes
. The target coordinates to be reached are set as
. The AUV’s initial speed is prescribed as 1.5 m/s, and the input is initialized as
. The sampling period is set as
, and a prediction step of
is employed to forecast the AUV’s forthcoming trajectory. The coordinate and scale parameters of obstacles are shown in
Table 4. The first ternary array represents the coordinate of the obstacles in the spatial coordinate system, while the second array represents the scale in the
,
, and
directions. In order to guarantee the effectiveness and safety of the AUV’s motion, the input constraints are modified as follows:
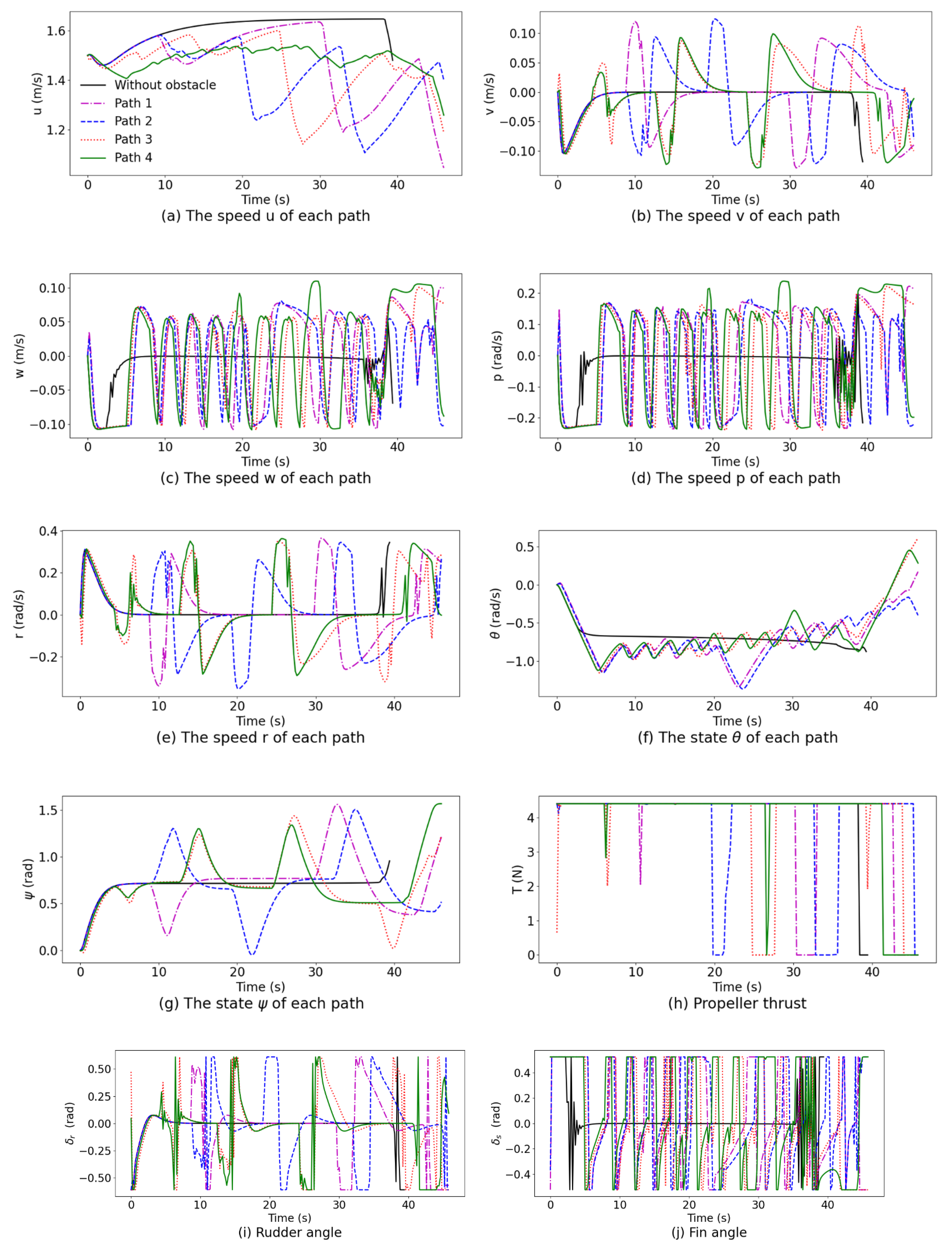
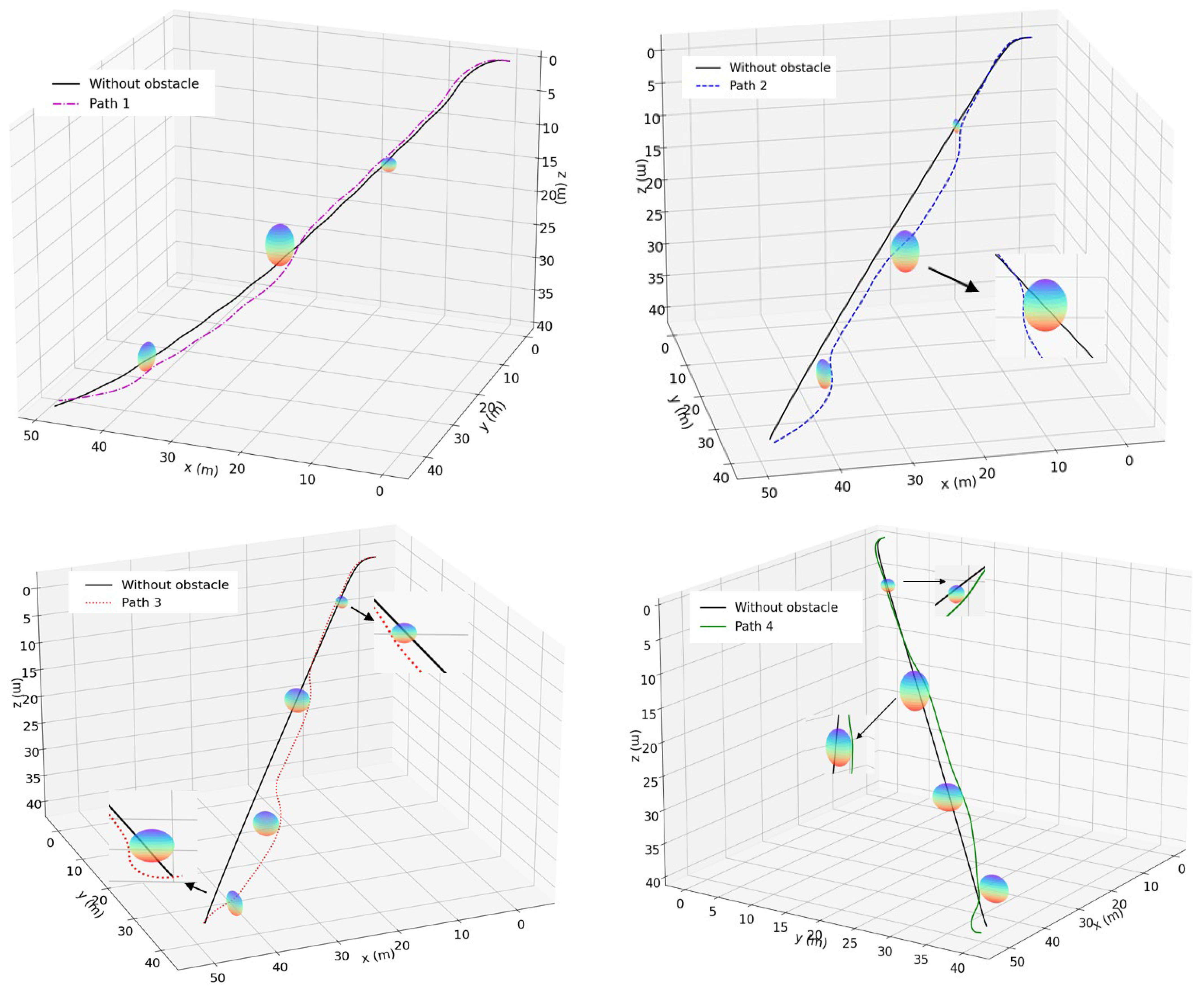
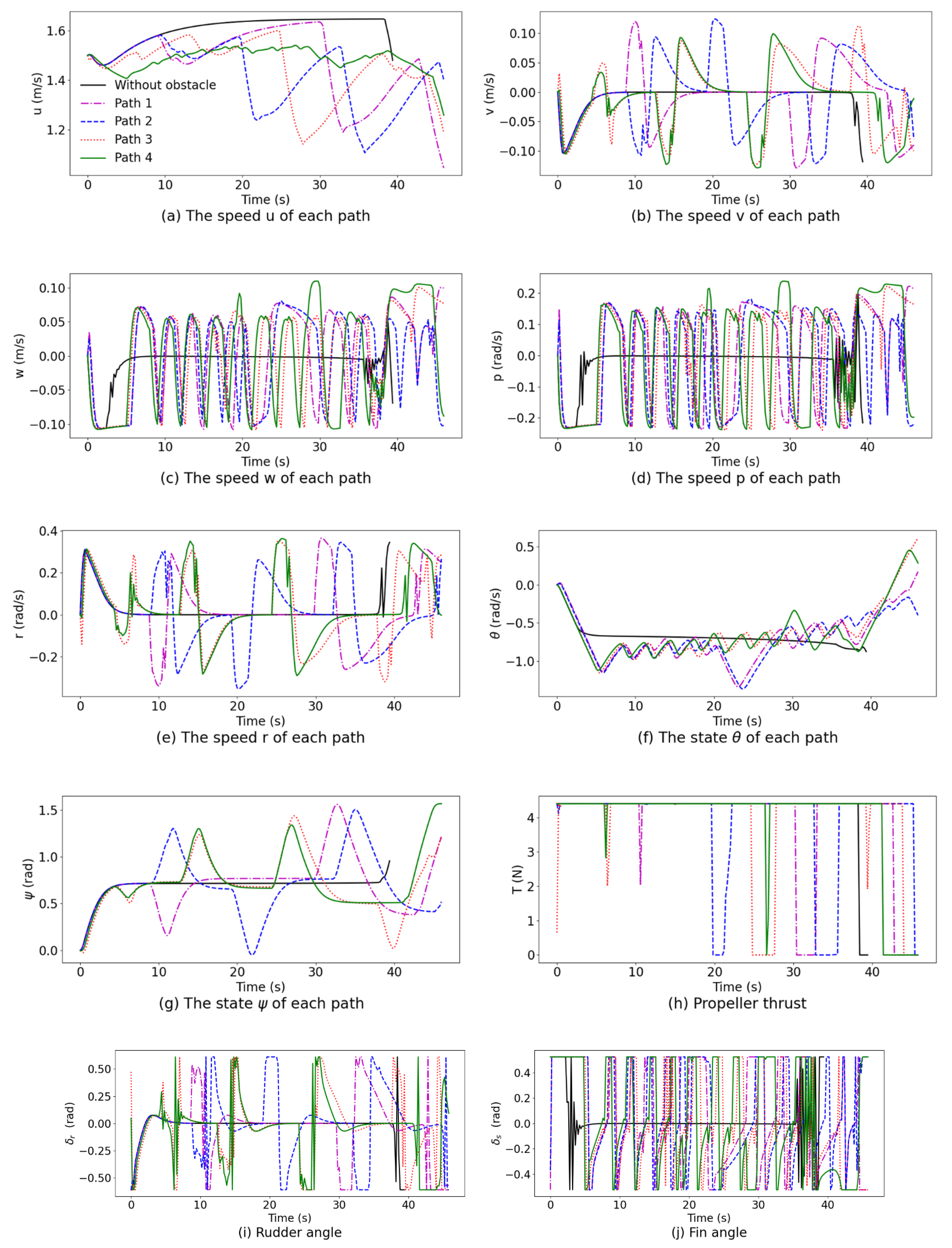
The efficacy of the proposed method in achieving three-dimensional obstacle avoidance for the AUV is substantiated by the results illustrated in
Figure 11 and
Figure 12. In
Figure 11, the AUV obstacle avoidance paths are depicted for four distinct scenarios. The black solid line represents the path without any obstacles, while the magenta dash-dotted curve, blue dashed curve, red dotted curve, and greed curve represent the AUV’s obstacle avoidance trajectories in their respective scenarios. Correspondingly,
Figure 12 provides insight into the AUV’s state and input under these four scenarios, maintaining the same representation as in
Figure 11. Analyzing the simulation results, it is evident that the proposed method remarkably enables the AUV to adeptly navigate three-dimensional space while avoiding obstacles. Additionally, the AUV’s state variables and input parameters consistently adhere to the specified constraint range throughout the obstacle avoidance maneuvers. It is essential to note that, owing to the disparity between the center of gravity and center of buoyancy in the
direction, maintaining the AUV’s stability during movement necessitates significant adjustments in the fin angle during the control process.
The results from these simulations validate the efficacy of the proposed method in enabling three-dimensional obstacle avoidance for the AUVs. The AUV adeptly maneuvers around obstacles while strictly adhering to the constraints governing its state and input. This research serves as a valuable contribution to the field of autonomous underwater systems, shedding light on effective three-dimensional obstacle avoidance strategies and elevating the overall competency and safety of AUVs operating in intricate underwater environments.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}