
A Novel Unmanned Surface Vehicle Path-Planning Algorithm Based on A* and Artificial Potential Field in Ocean Currents

Abstract
1. Introduction
- (1)
- The search strategy of the A* algorithm is enhanced by incorporating the elimination of perilous nodes and the adaptive guidance angle to enhance the computation efficiency. Additionally, the concept of an artificial potential field (APF) is integrated into the cost function of the traditional A* algorithm as a cost weight.
- (2)
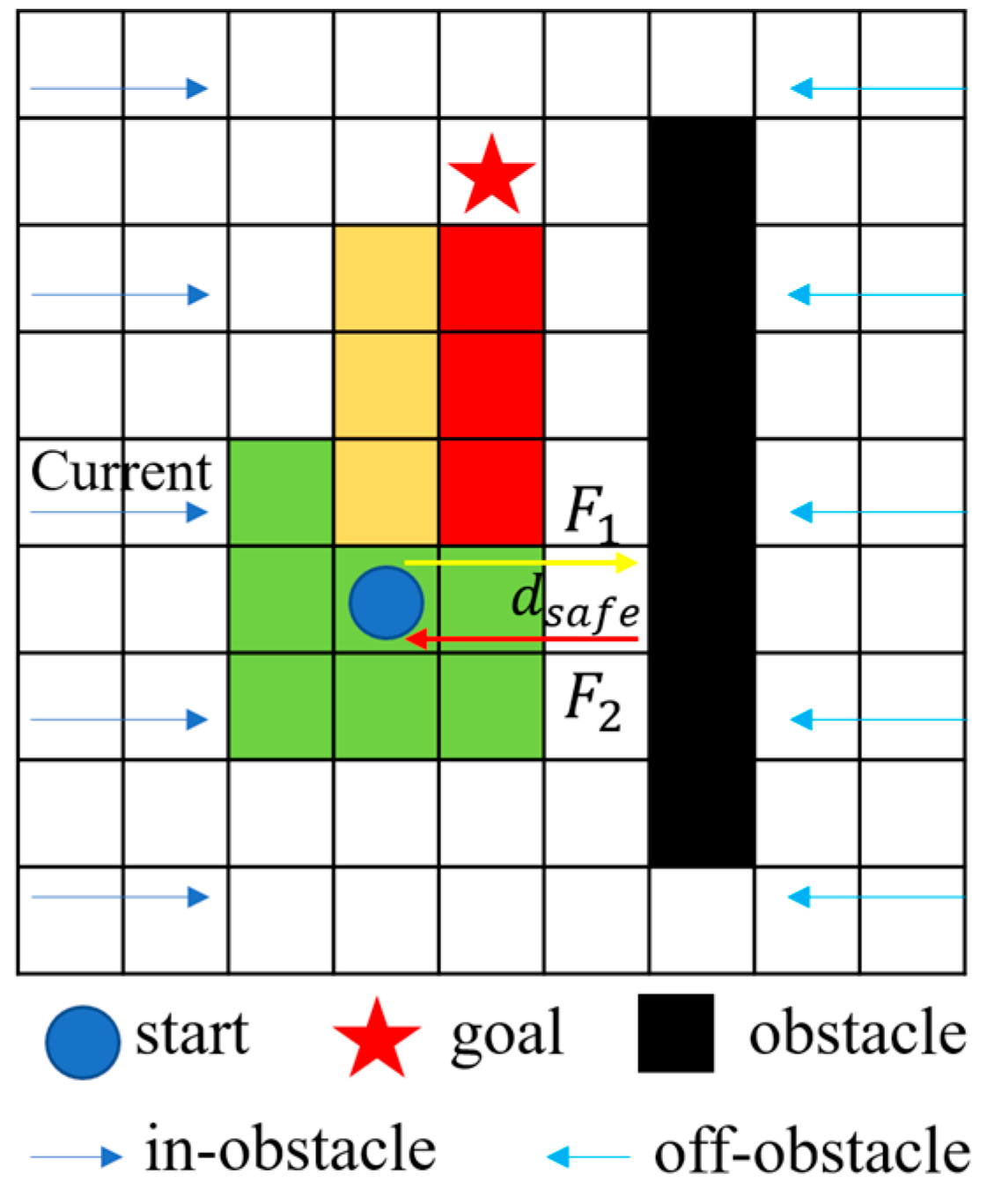
- The effect of ocean currents is computed with the virtual potential field force exerted by the obstacle on the USV. When the force of the ocean currents propels the USV toward an obstacle, the equivalent force produced virtually by the obstacle acts as a repulsive force, which causes a path to be generated to steer clear of the obstacle. On the contrary, the planned path points can be selected to be close to the grid nodes near the obstacles. This is achieved by introducing equivalent forces to mitigate the adverse effects of the ocean currents.
- (3)
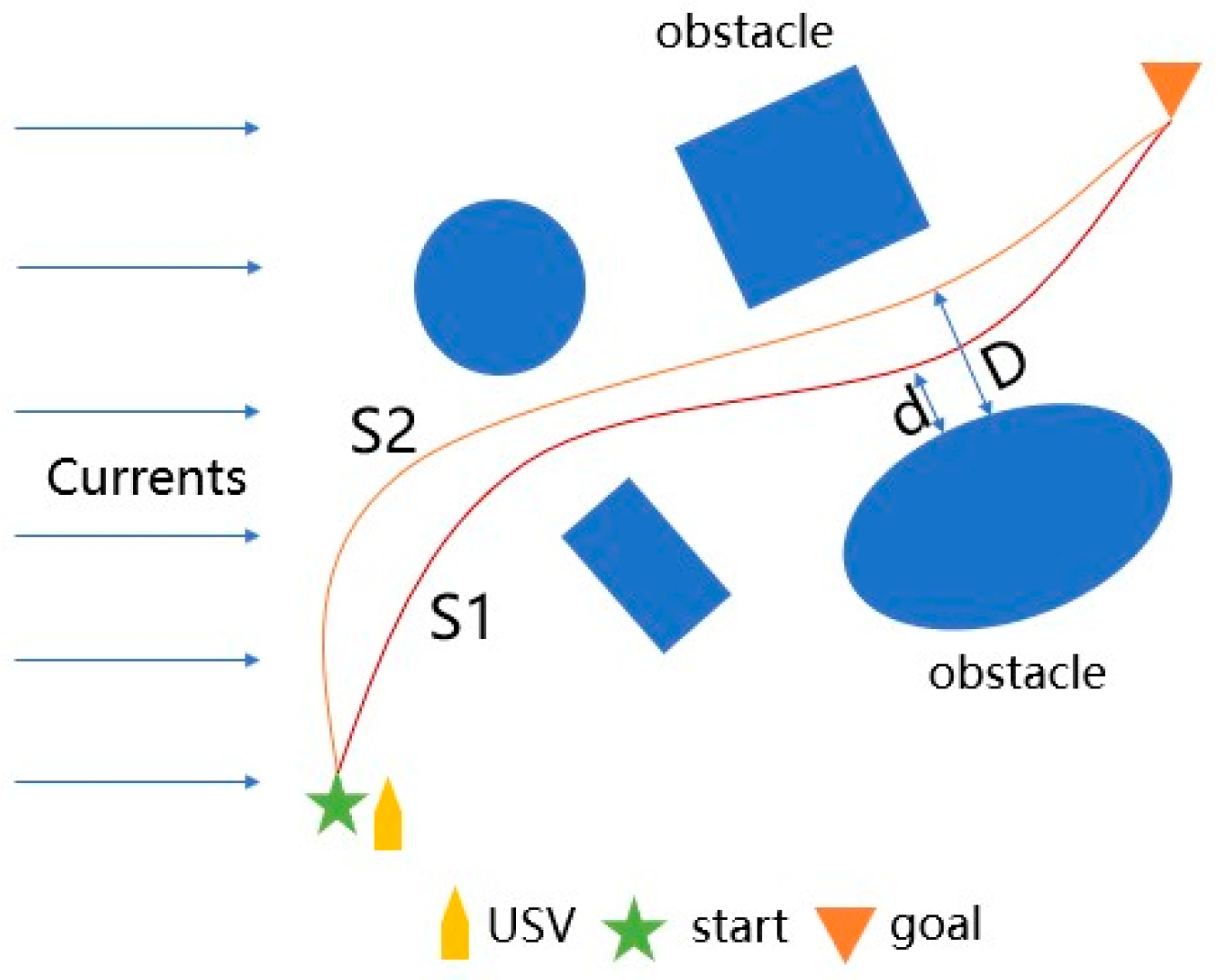
- The path planned by the improved A* algorithm can maintain a safe and appropriate distance from obstacles under various current conditions. This provides a sufficient safety margin for the actual navigation of the USV to mitigate the adverse effects of ocean current disturbances. Furthermore, this research allows the influence of ocean currents to be taken into account in the path-planning phase, thereby providing a safer margin for the path-tracking and control phase.
2. Literature Review
2.1. Global Path-Planning Methods
2.2. Path Planning in the Current Environment
3. Materials and Methods
3.1. Environmental Model
3.1.1. Construction of the Environmental Map
3.1.2. Ocean Current Characteristics
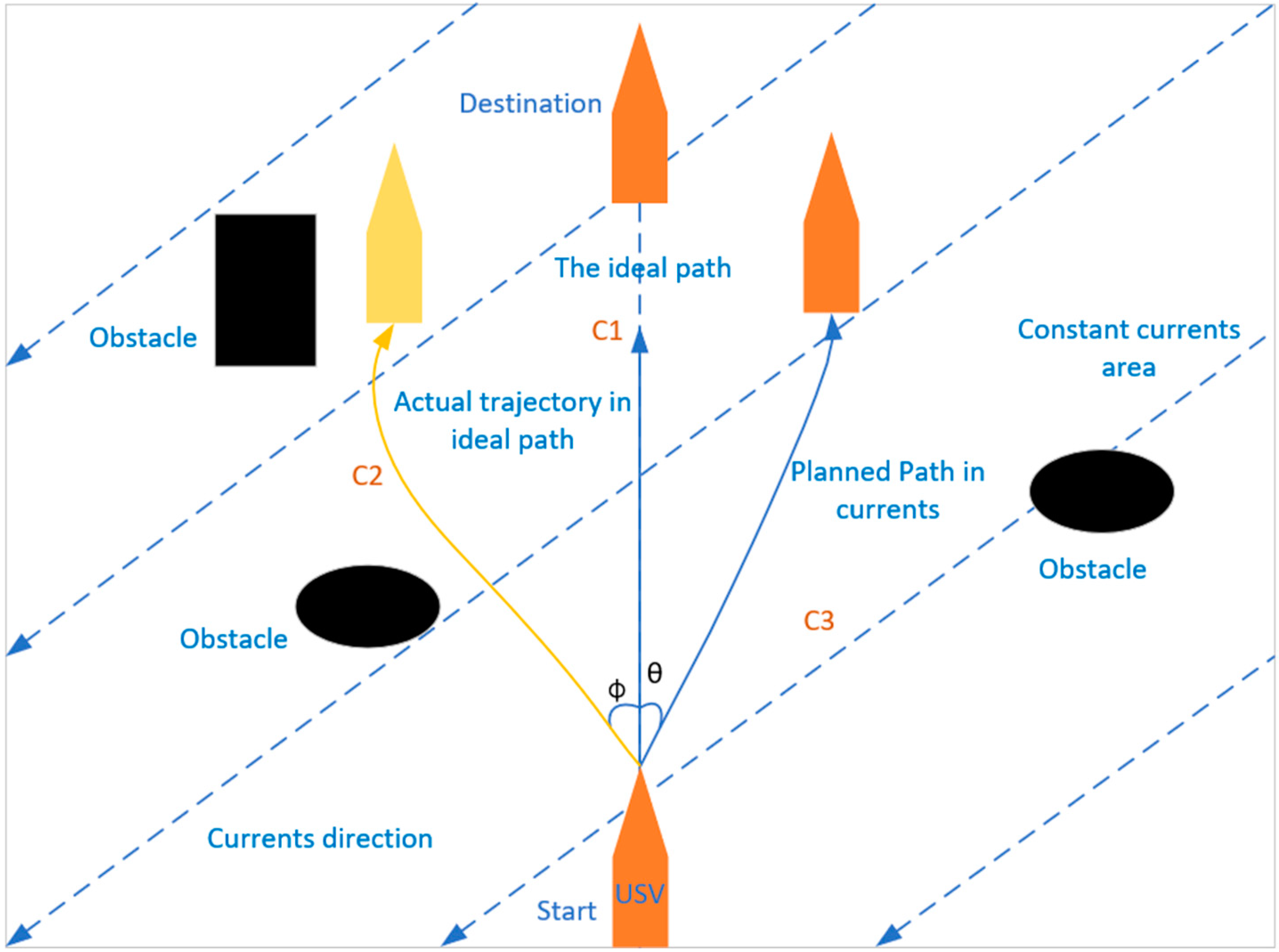
3.1.3. Deviation in the USV Caused by Currents
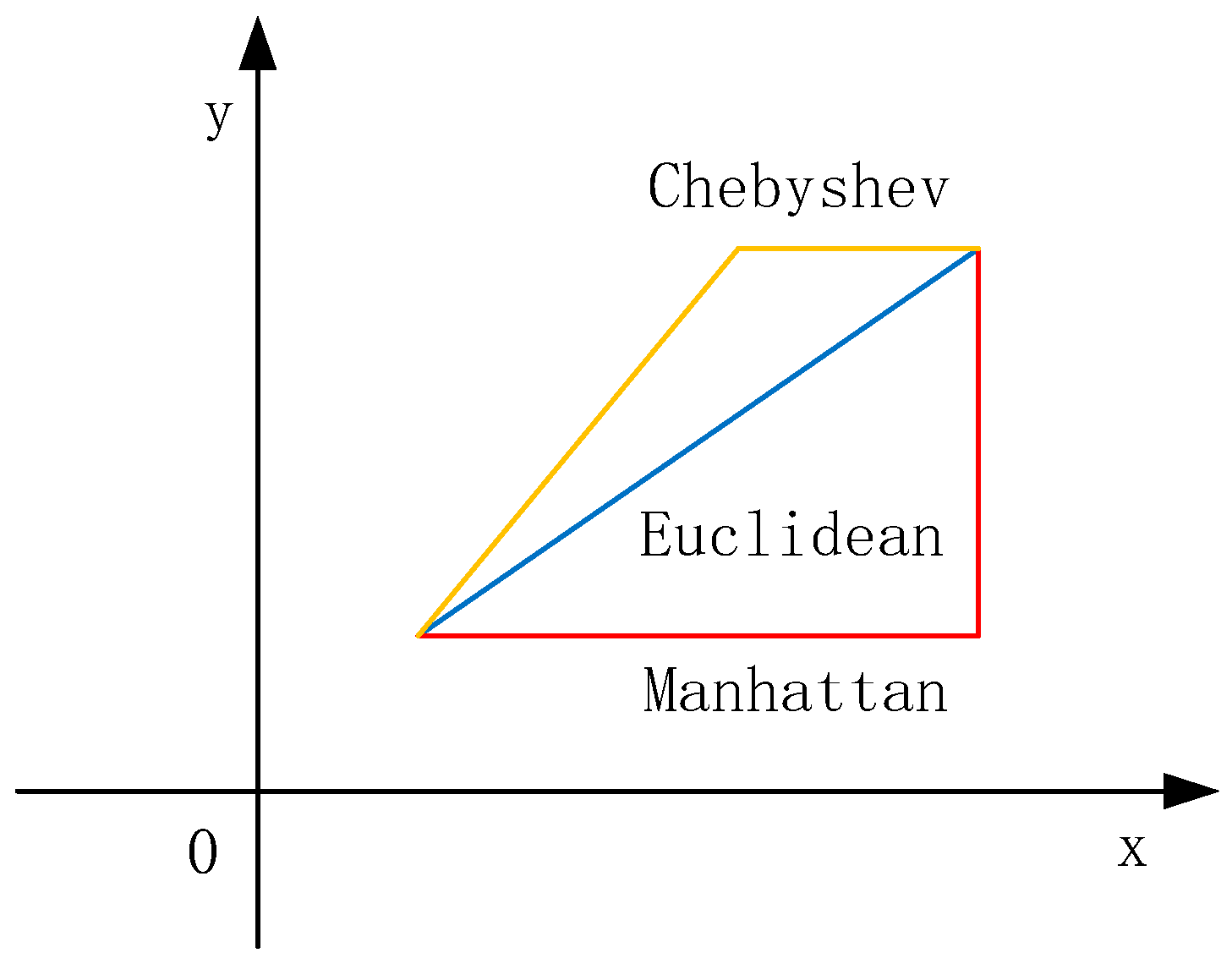
3.2. Traditional A* Algorithm
3.3. Improvement of A* Algorithm
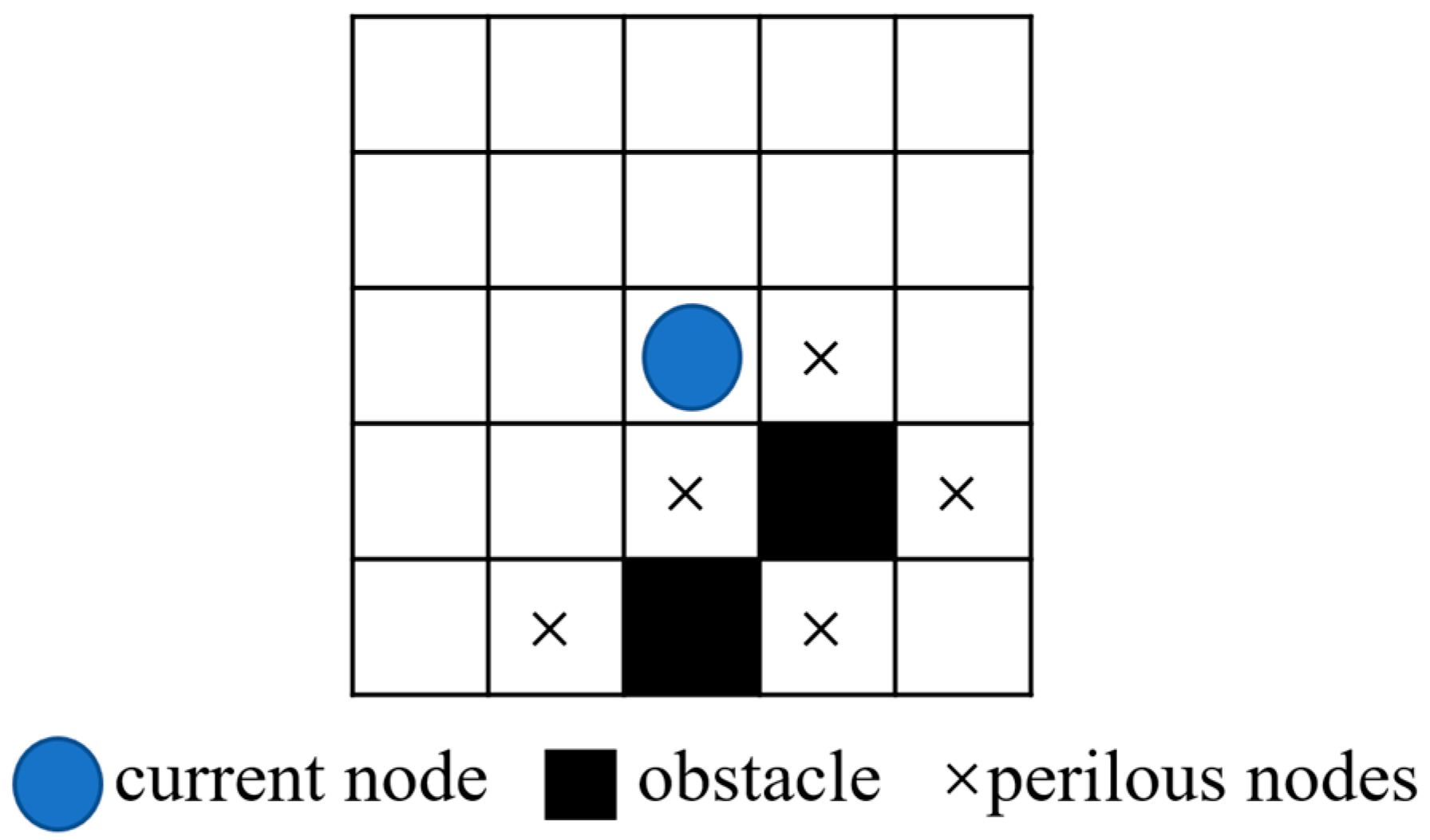
3.3.1. Bypassing Perilous Nodes
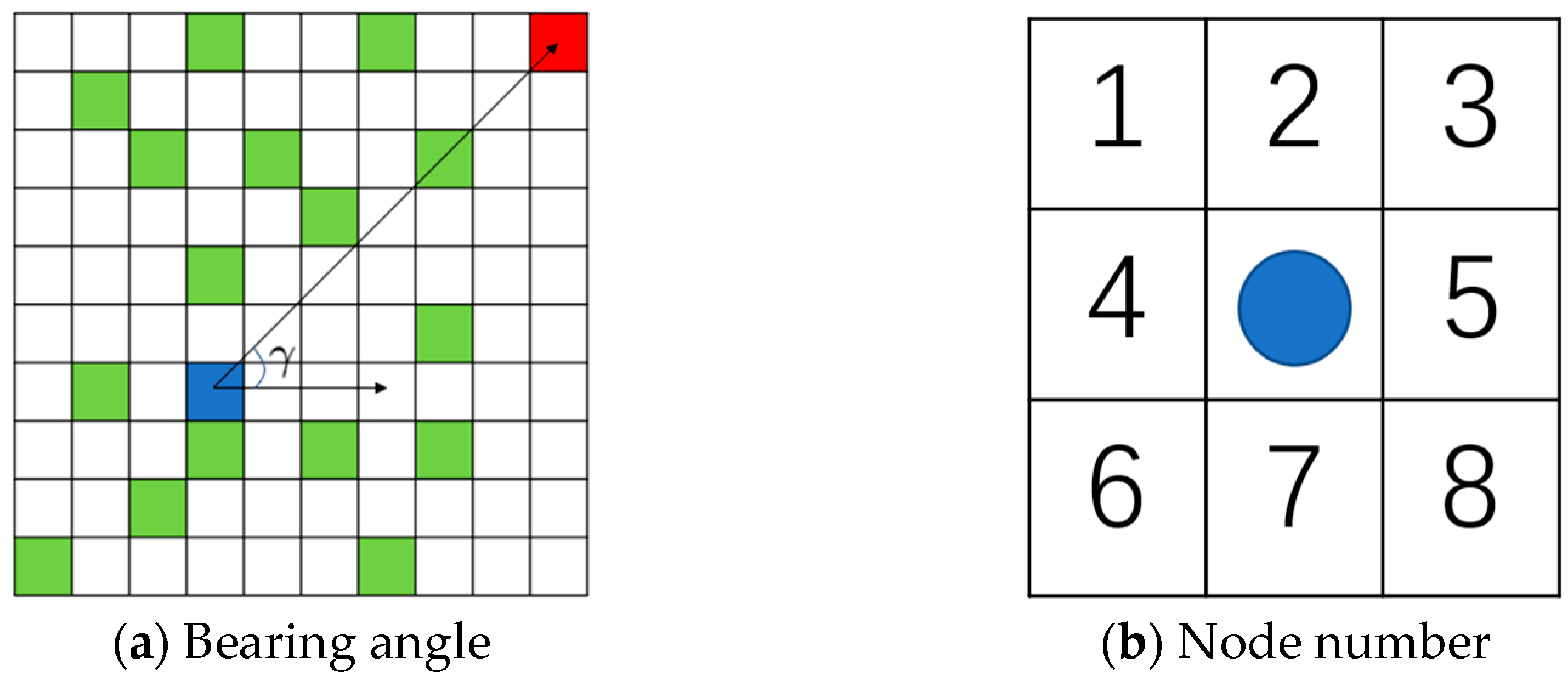
3.3.2. Introduction of Adaptive Guidance Angle
3.3.3. Improvement of the Cost Function with an APF
3.3.4. Maximum Acting Distance of Obstacles with Currents
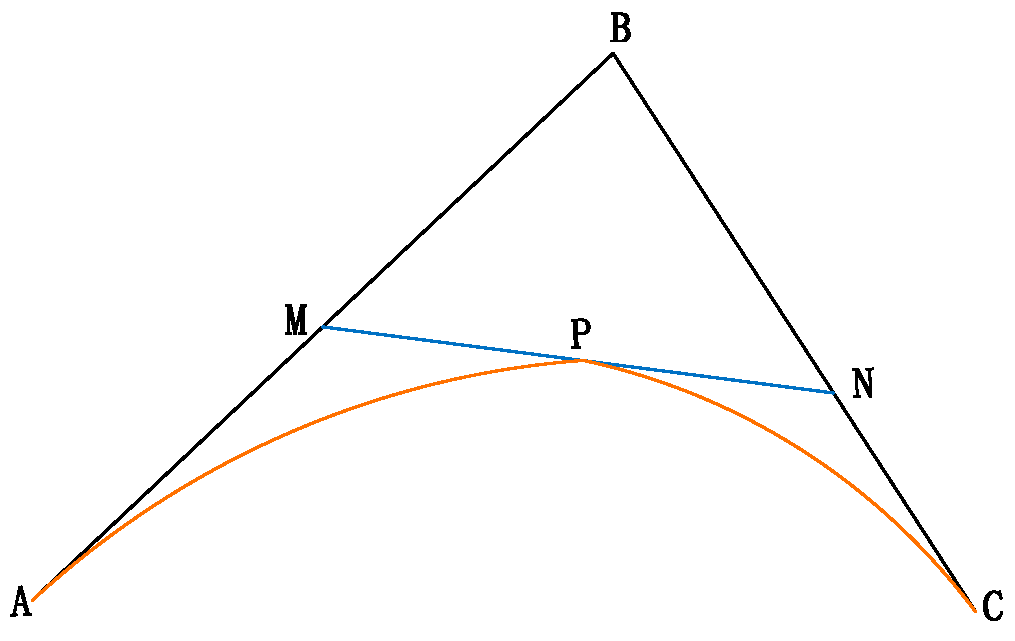
3.3.5. Bezier Curve Smoothing
3.3.6. The Pseudocode and Flowchart of Improved A* Algorithm
| Algorithm 1: Improved A* |
| Input: start node, goal node, map, currents parameter Output: smoothed path 1: Openlist = [], Closelist = [], path = [], distance = []; 2: Mark N[start] as Openlist; 3: Set , , , , currents speeds; 4: While Openlist ≠ Ø do 5: Search neighbor nodes of N[i] in Openlist parent node; 6: for child node in neighbor nodes 7: If child node = obstacle, perilous node or in the direction of N[goal] 8: child node = null; 9: else 10: child nodes = child node; 11: calculate , , , of child nodes; 12: select min () in child nodes as Openlist N[i]; 13: if N[i] = N[goal] then 14: return “path is found” and smooth the path; 15: else 16: Mark N[i] as Closelist; 17: if successor Ni[j] of N[i] not in Closelist or Openlist then 18: Mark Ni[j] as Openlist; 19: calculate , , , and , respectively; 20: if Ni[j] in Openlist and (Ni[j]) is smaller than (Nm[j]) then 21: f(Nm[j]) = f(Ni[j]) and set parent node of N[j] as N[i] 22: end if 23: end if 24: end if 25: end if 26: end for 27: end while 28: return “path is not found”. |
4. Experiments and Numerical Analysis
4.1. Path Planning without Currents
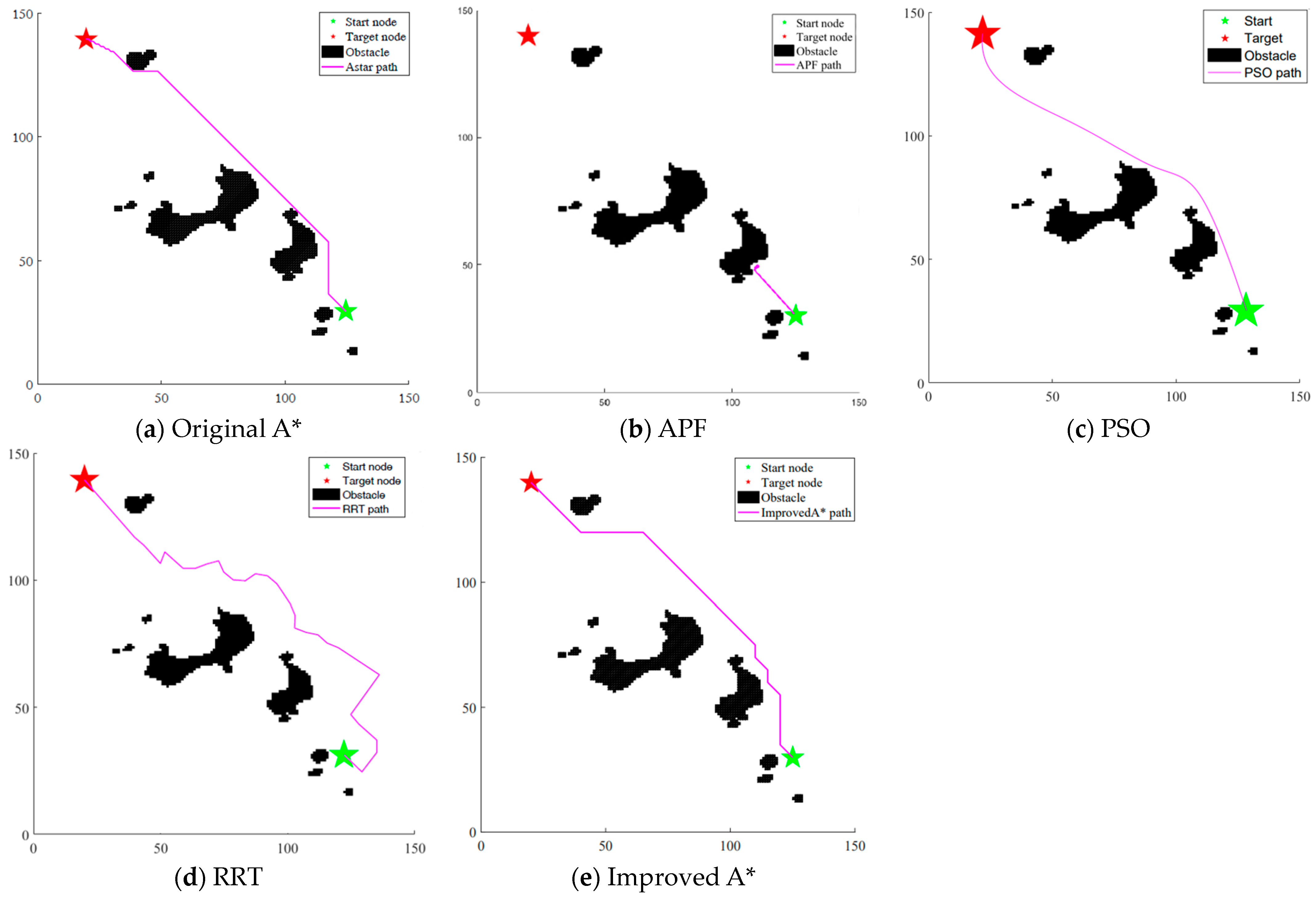
4.1.1. Simulation Experiment 1 and Result Analysis
4.1.2. Simulation Experiment 2 and Result Analysis
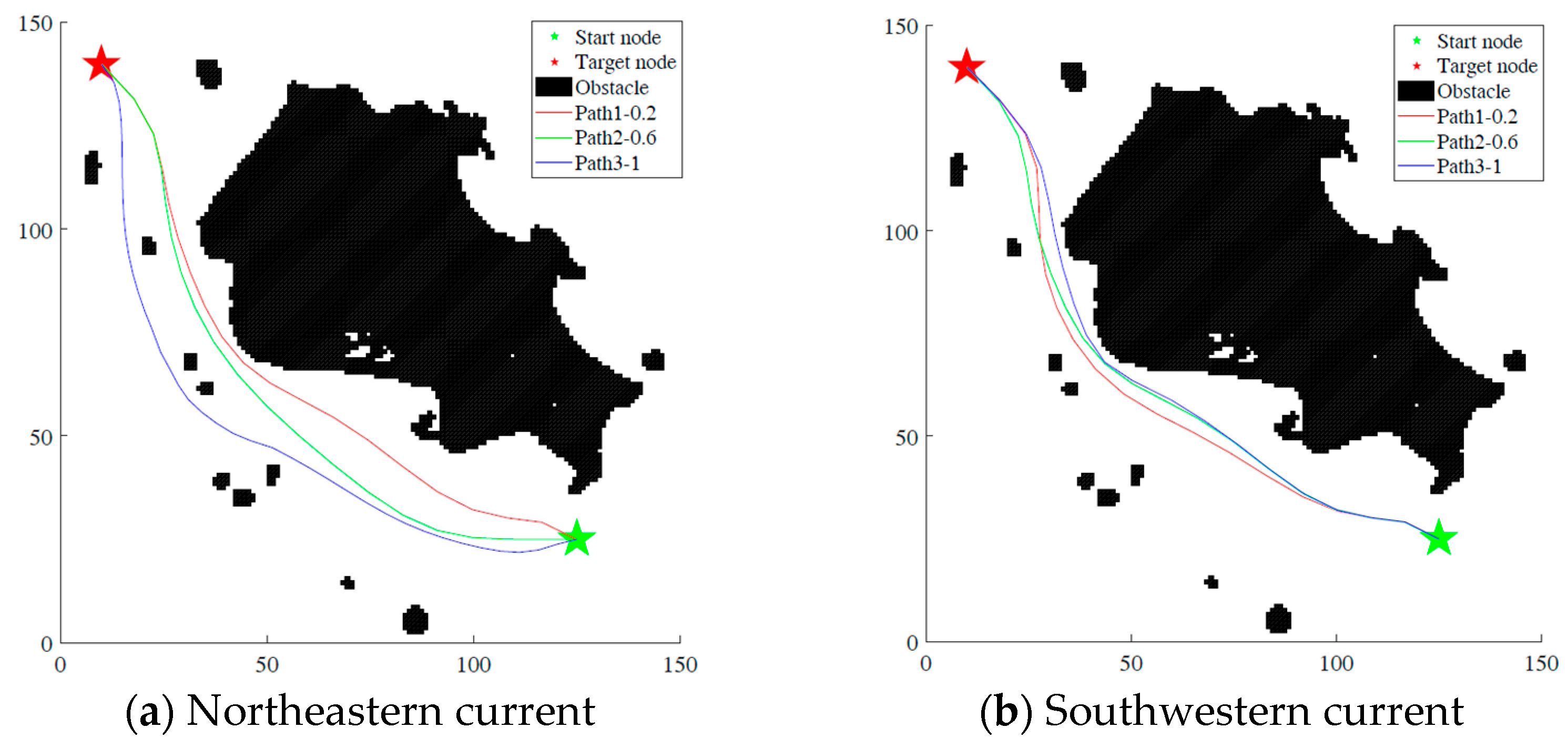
4.2. Path Planning under Different Ocean Current Conditions
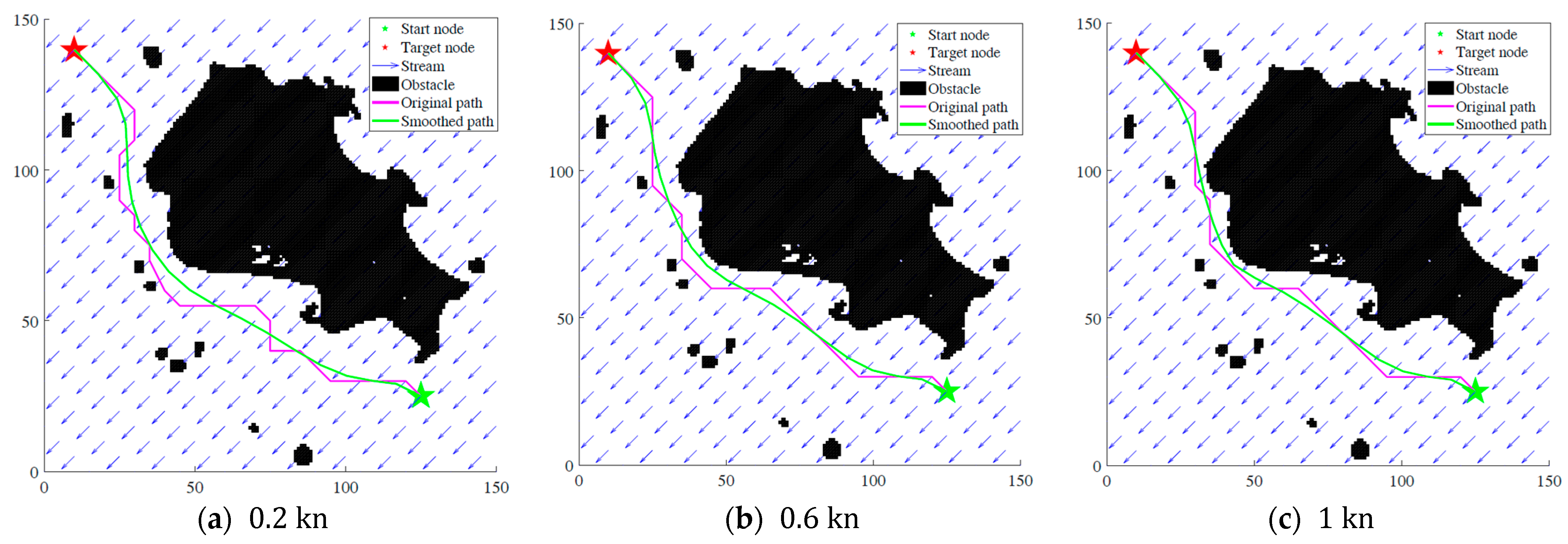
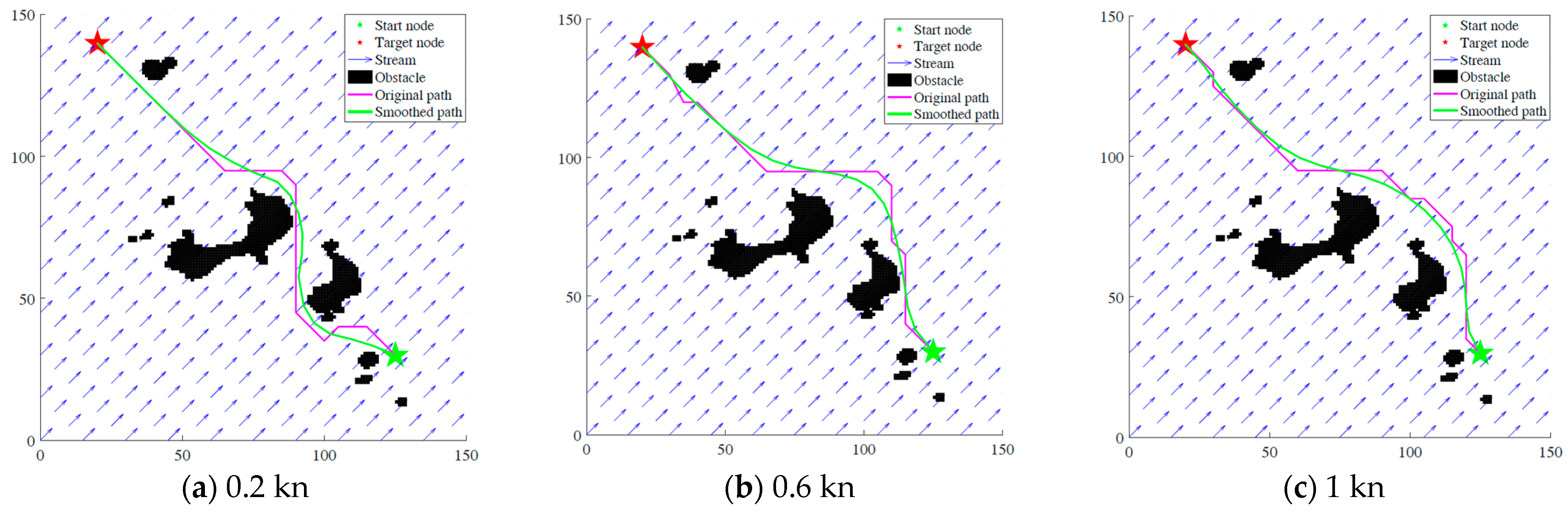
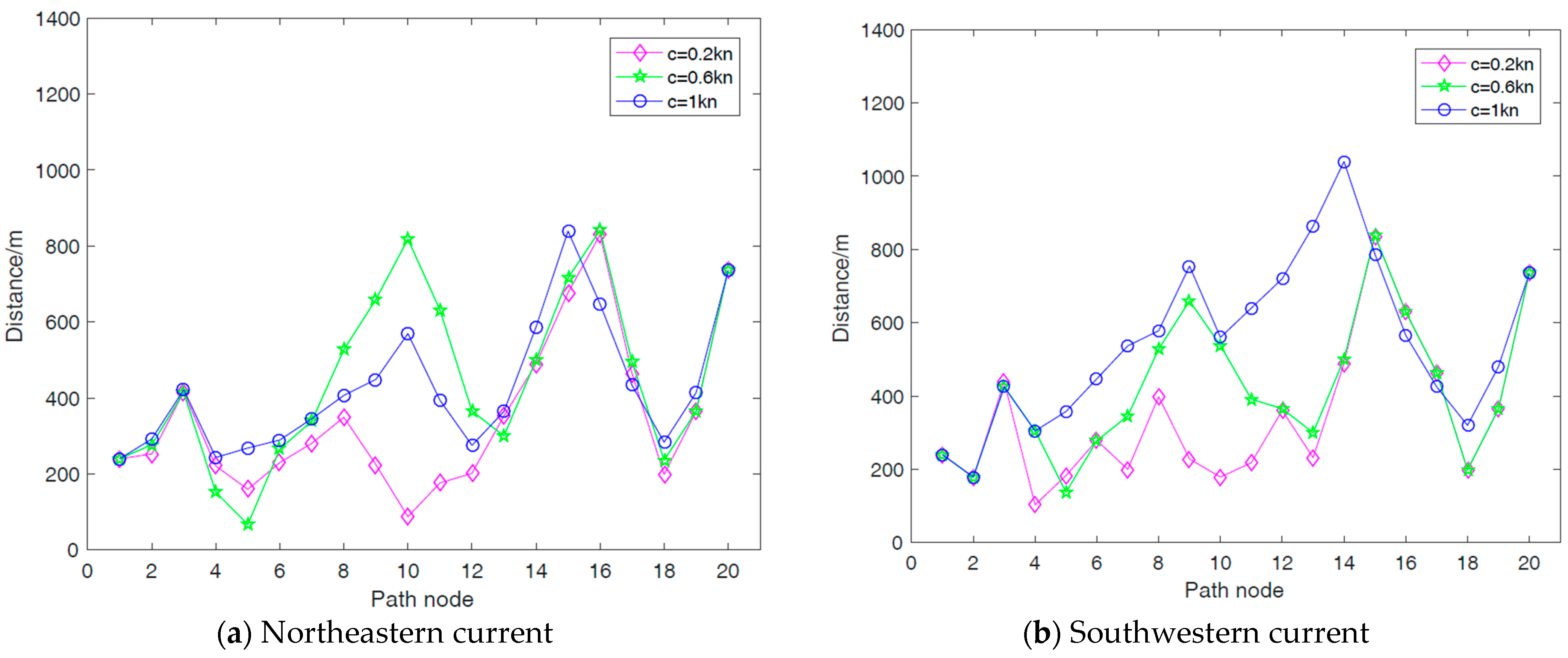
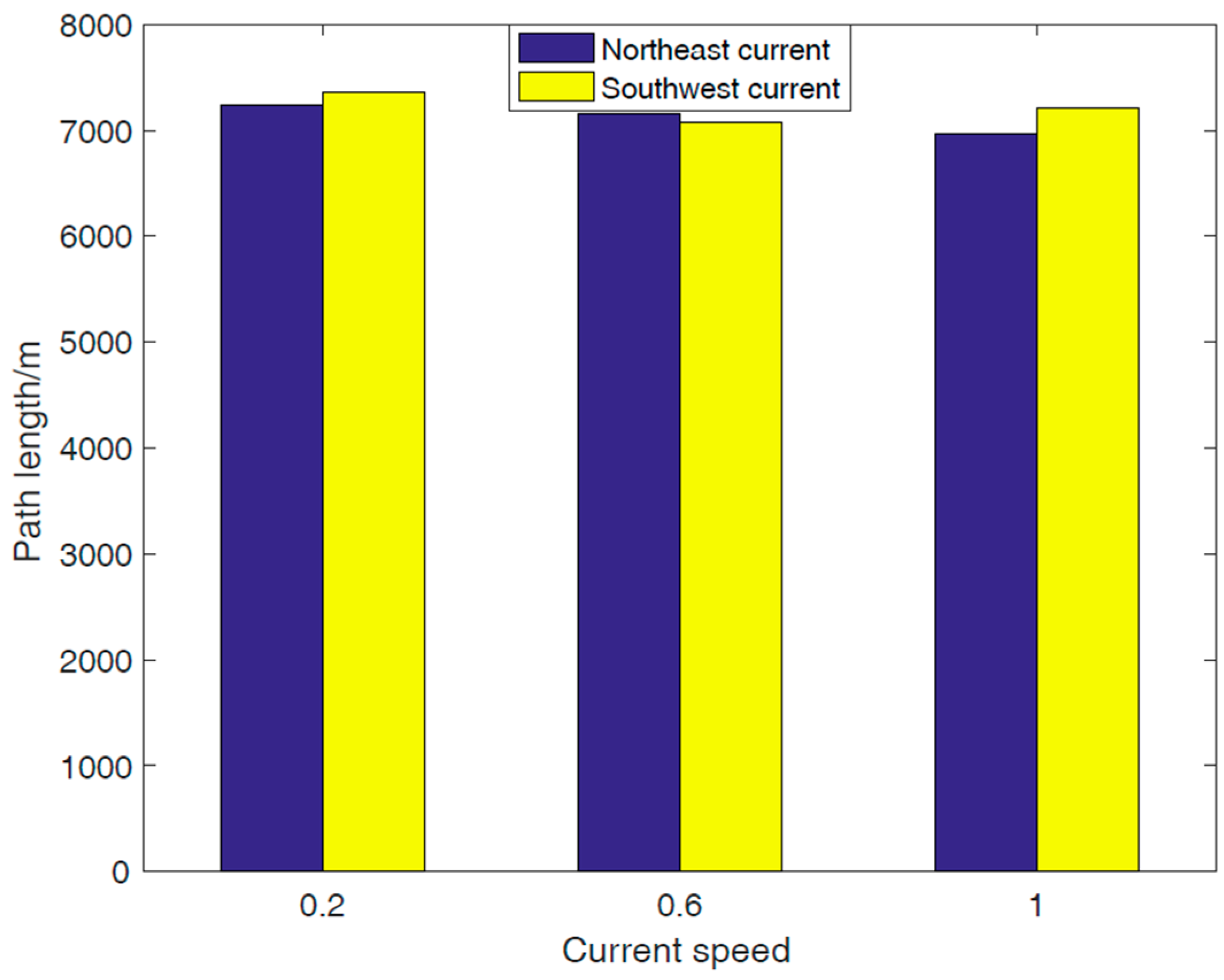
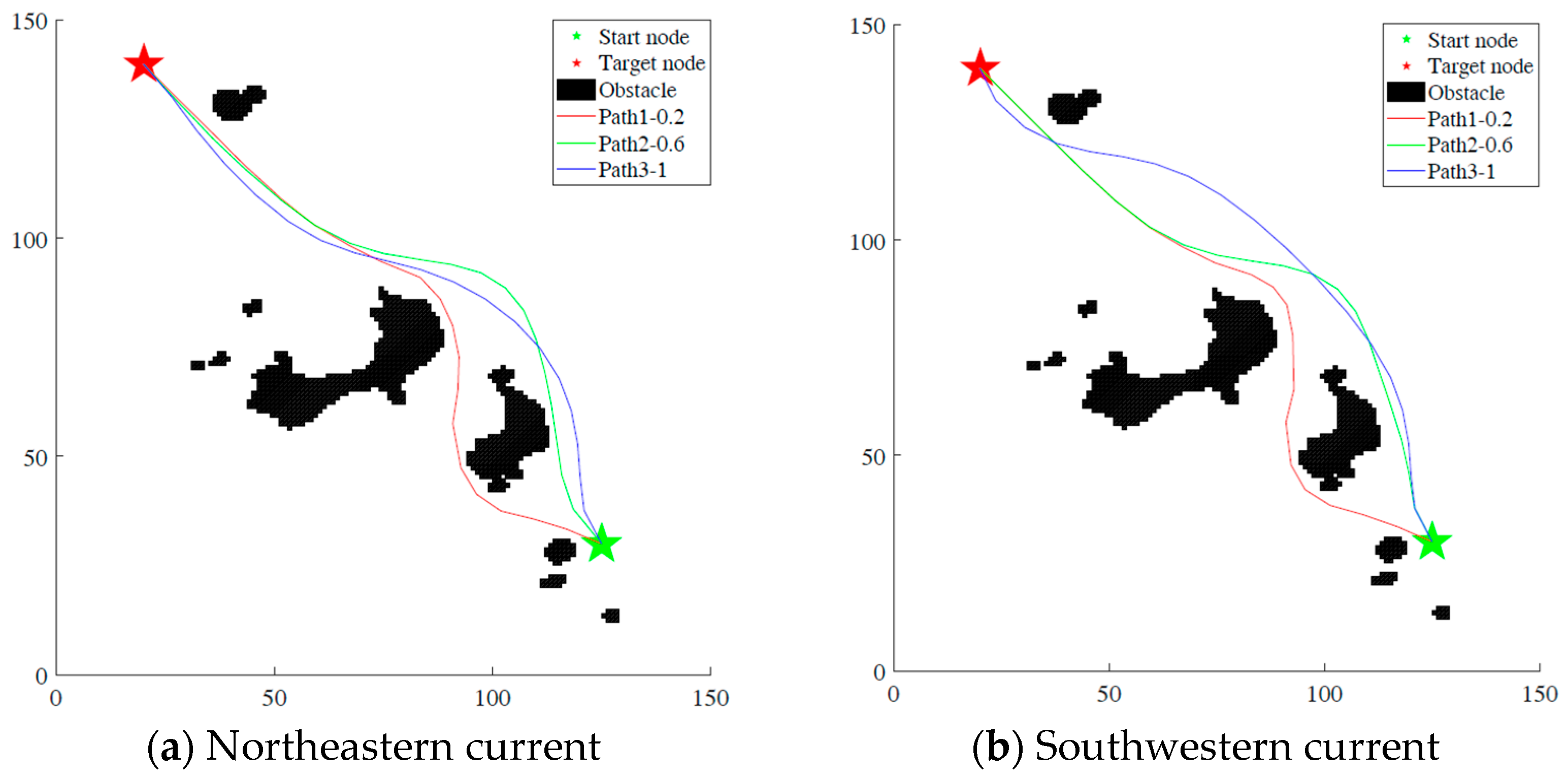
4.2.1. Simulation Experiment 3 and Result Analysis

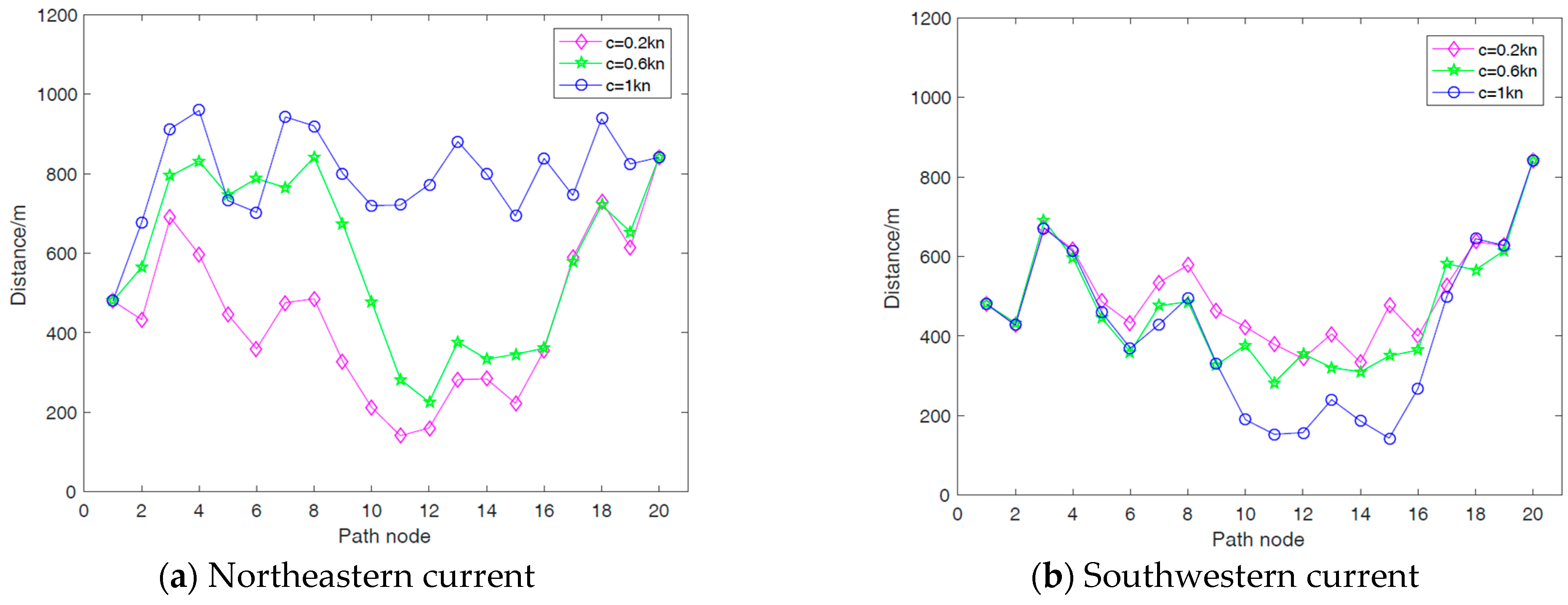
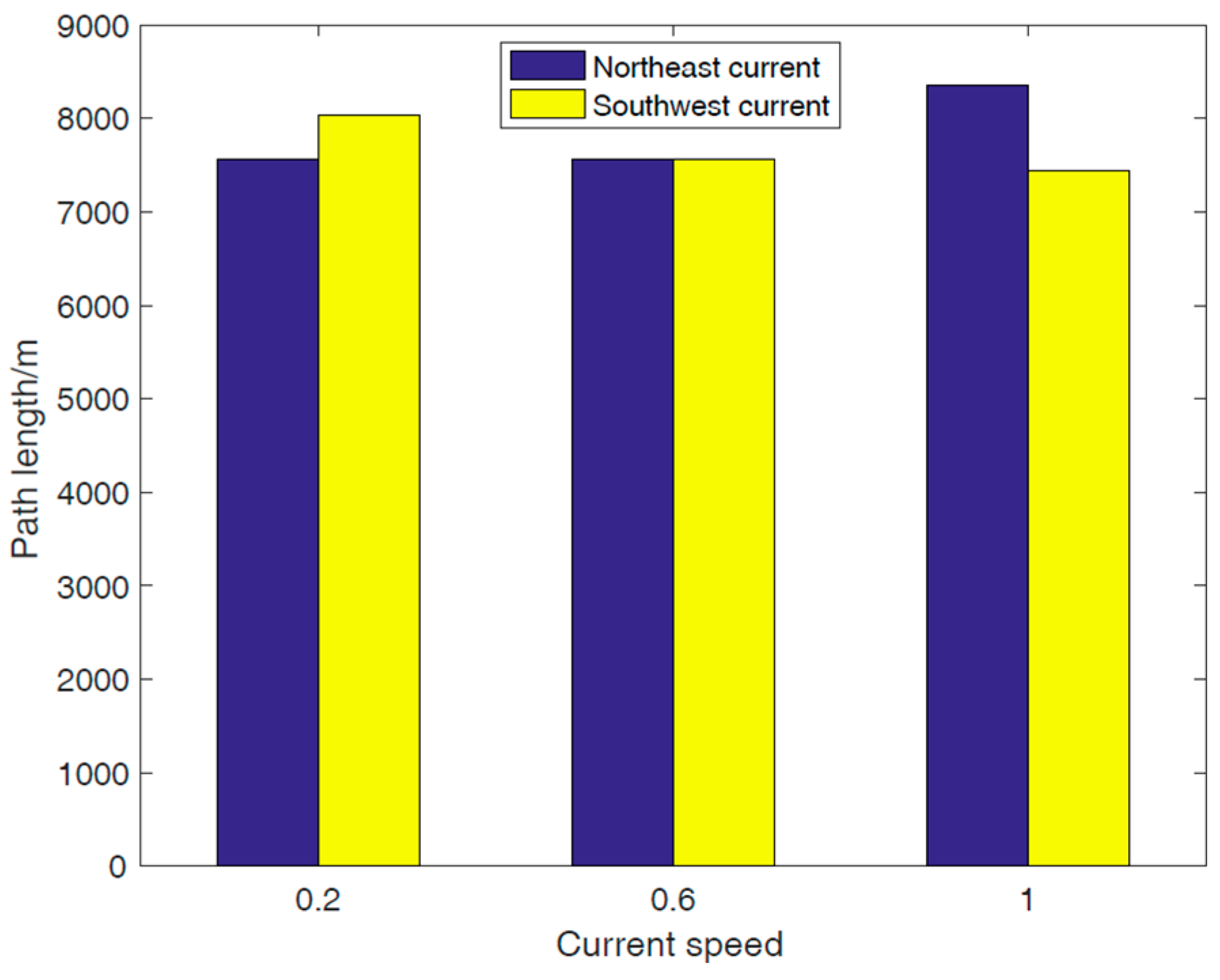
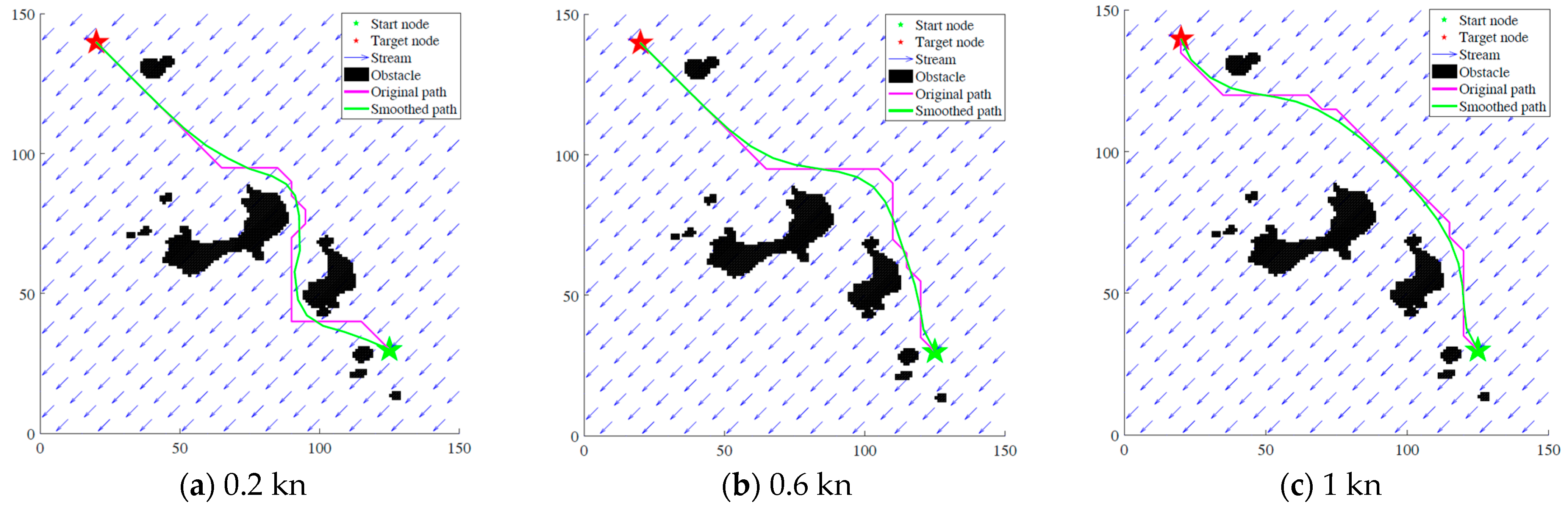
4.2.2. Simulation Experiment 4 and Result Analysis
5. Conclusions
- (1)
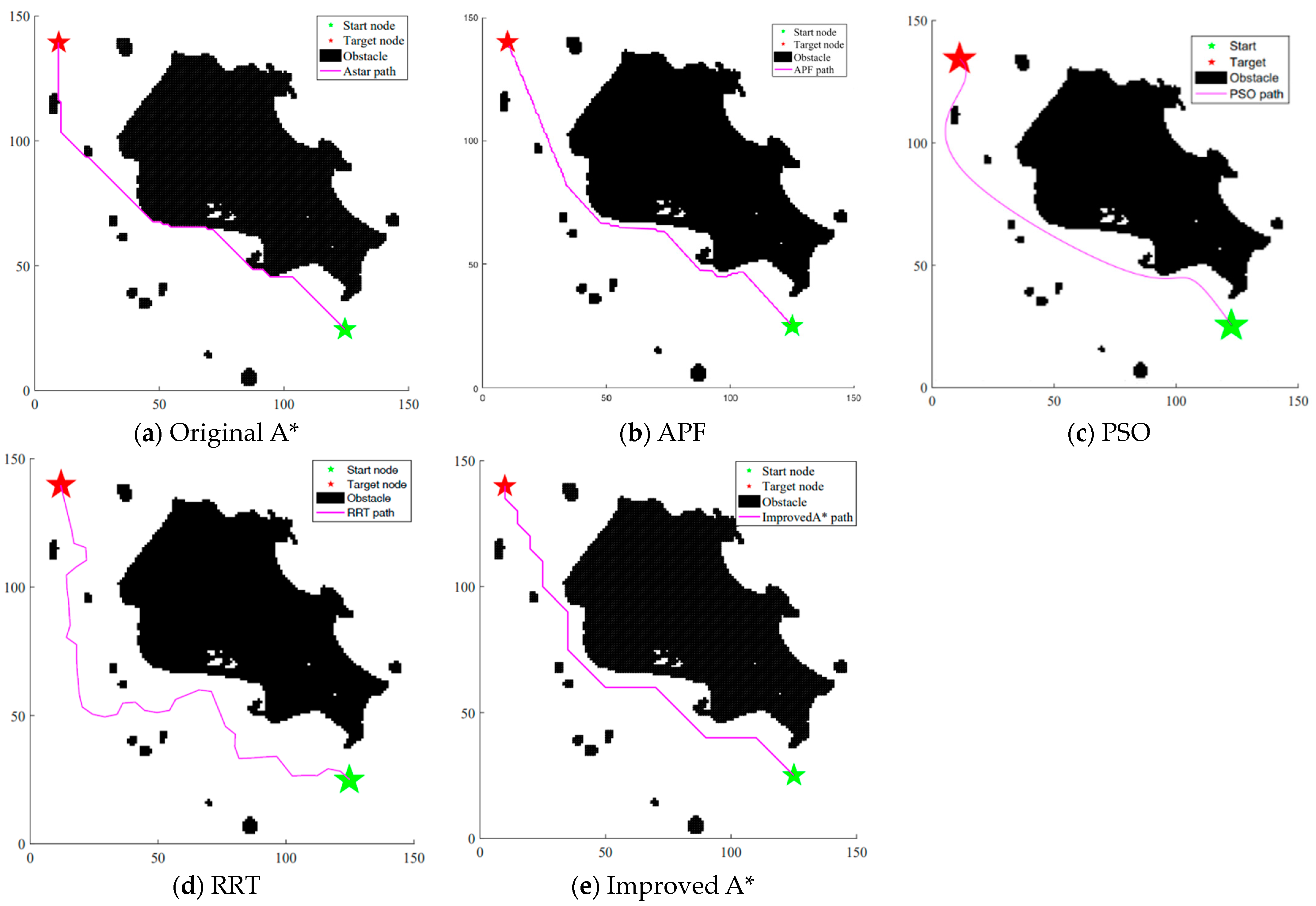
- The proposed A* algorithm runs faster than other tested path-planning algorithms by ignoring perilous nodes and following the adaptive guidance angle. These improvements can reduce a lot of unnecessary computation while expanding the next nodes.
- (2)
- This study considered the impact of the current on the USV as forces exerted by obstacles on the USV by integrating the APF into the traditional A* algorithm. The proposed A* algorithm favorably deals with the ocean currents and obstacles and keeps an appropriate path–obstacle distance along the path.
- (3)
- To smooth and optimize the path, this study adapted Bezier curves to address the problem of turning points. This optimization effectively reduces the number of turning points and the difficulty of controlling the steering of the USV when it is navigating in the currents.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The review unmanned surface vehicle path planning: Based on multi-modality constraint. Ocean Eng. 2020, 200, 107043. [Google Scholar] [CrossRef]
- Chou, C.C.; Wang, C.N.; Hsu, H.P. A novel quantitative and qualitative model for forecasting the navigational risks of Maritime Autonomous Surface Ships. Ocean Eng. 2022, 248, 110852. [Google Scholar] [CrossRef]
- Liu, J.; Wang, J. Overview of obstacle avoidance path planning algorithm for unmanned surface vehicle. Comput. Appl. Softw. 2020, 37, 11. [Google Scholar]
- Zhang, W.; Shan, L.; Chang, L.; Dai, Y. SVF-RRT*: A Stream-Based VF-RRT* for USVs Path Planning Considering Ocean Currents. IEEE Robot. Autom. Lett. 2023, 8, 2413–2420. [Google Scholar] [CrossRef]
- Hao, S.; Ma, W.; Han, Y.; Zheng, H.; Ma, D. Optimal path planning of unmanned surface vehicle under current environment. Ocean Eng. 2023, 286, 115591. [Google Scholar] [CrossRef]
- Xing, B.; Yu, M.; Liu, Z.; Tan, Y.; Sun, Y.; Li, B. A Review of Path Planning for Unmanned Surface Vehicles. J. Mar. Sci. Technol. 2023, 11, 1556. [Google Scholar] [CrossRef]
- Jin, K.; Zhu, H.; Gao, R.; Wang, J.; Wang, H.; Yi, H.; Shi, C.J.R. DEMRL: Dynamic estimation meta reinforcement learning for path following on unseen unmanned surface vehicle. Ocean Eng. 2023, 288, 115958. [Google Scholar] [CrossRef]
- Peng, Z.; Li, J.; Han, B.; Gu, N. Safety-Certificated Line-of-Sight Guidance of Unmanned Surface Vehicles for Straight-Line Following in a Constrained Water Region Subject to Ocean Currents. J. Mar. Sci. Appl. 2023, 22, 602–613. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, R.; Wang, H. Finite-time trajectory tracking control of a class of nonlinear discrete-time systems. IEEE Trans. Syst. Man Cybern. 2017, 47, 1679–1687. [Google Scholar] [CrossRef]
- Fnadi, M.; Du, W.; Plumet, F.; Benamar, F. Constrained Model Predictive Control for dynamic path tracking of a bi-steerable rover on slippery grounds. Control Eng. Pract. 2021, 107, 104693. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X.; Luo, M.; Yang, C. MPC-based 3-D trajectory tracking for an autonomous underwater vehicle with constraints in complex ocean environments. Ocean Eng. 2019, 189, 106309. [Google Scholar] [CrossRef]
- Du, P.Z.; Yang, W.C.; Chen, Y.; Huang, S.H. Improved indirect adaptive line-of-sight guidance law for path following of under-actuated AUV subject to big ocean currents. Ocean Eng. 2023, 281, 114729. [Google Scholar] [CrossRef]
- Yazdani, A.; MahmoudZadeh, S.; Yakimenko, O.; Wang, H. Perception-aware online trajectory generation for a prescribed manoeuvre of unmanned surface vehicle in cluttered unstructured environment. Robot. Auton. Syst. 2023, 169, 104508. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y. Data harvesting in uncharted waters: Interactive learning empowered path planning for USV-assisted maritime data collection under fully unknown environments. Ocean Eng. 2023, 287, 115781. [Google Scholar] [CrossRef]
- Shu, Y.; Zhu, Y.; Xu, F.; Gan, L.; Lee, P.T.W.; Yin, J.; Chen, J. Path planning for ships assisted by the icebreaker in ice-covered waters in the Northern Sea Route based on optimal control. Ocean Eng. 2023, 267, 113182. [Google Scholar] [CrossRef]
- Sun, B.; Zhang, W.; Li, S.; Zhu, X. Energy optimised D* AUV path planning with obstacle avoidance and ocean current environment. J. Navig. 2022, 75, 685–703. [Google Scholar] [CrossRef]
- Liu, L.S.; Lin, J.F.; Yao, J.X.; He, D.W.; Zheng, J.S.; Huang, J.; Shi, P. Path planning for smart car based on Dijkstra algorithm and dynamic window approach. Wirel. Commun. Mob. Comput. 2021, 2021, 8881684. [Google Scholar] [CrossRef]
- Zhang, H.; Tao, Y.; Zhu, W. Global Path Planning of Unmanned Surface Vehicle Based on Improved A-Star Algorithm. Sensors 2023, 23, 6647. [Google Scholar] [CrossRef]
- Li, S.; Sun, B.; Zhu, X. Autonomous underwater vehicles dynamic path planning based on improved D∗ algorithm in ocean current environment. Chin. High Technol. Lett. 2022, 32, 84–92. [Google Scholar]
- Gu, Q.; Zhen, R.; Liu, J.; Li, C. An improved RRT algorithm based on prior AIS information and DP compression for ship path planning. Ocean Eng. 2023, 279, 114595. [Google Scholar] [CrossRef]
- Li, W.; Wang, L.; Zou, A.; Cai, J.; He, H.; Tan, T. Path Planning for UAV Based on Improved PRM. Energies 2022, 15, 7267. [Google Scholar] [CrossRef]
- Feng, L.C.; Liang, H.W.; Du, M.B.; Yu, B. Guiding-area RRT path planning algorithm based on A* for intelligent vehicle. Comput. Syst. Appl. 2022, 26, 127–133. [Google Scholar]
- Gan, Y.; Zhang, B.; Ke, C.; Zhu, X.; He, W.; Ihara, T. Research on robot motion planning based on RRT algorithm with nonholonomic constraints. Neural Process. Lett. 2021, 53, 3011–3029. [Google Scholar] [CrossRef]
- Chi, W.; Ding, Z.; Wang, J.; Chen, G.; Sun, L. A generalized Voronoi diagram based efficient heuristic path planning method for RRTs in mobile robots. IEEE Trans. Ind. Electron. 2021, 99, 4926–4937. [Google Scholar] [CrossRef]
- Xu, W.; Yang, Y.; Yu, L.; Zhu, L. A global path planning algorithm based on improved RRT. Control Decis. 2022, 37, 829–838. [Google Scholar]
- Niu, Y.; Zhang, J.; Wang, Y.; Yang, H.; Mu, Y. A Review of Path Planning Algorithms for USV. In Proceedings of the 2021 International Conference on Autonomous Unmanned Systems, Changsha, China, 24–26 September 2021; Wu, M., Niu, Y., Gu, M., Cheng, J., Eds.; Springer: Singapore, 2021; pp. 263–273. [Google Scholar]
- Niu, H.; Ji, Z.; Savvaris, A.; Tsourdos, A. Energy efficient path planning for unmanned surface vehicle inspatially-temporally variant environment. Ocean Eng. 2020, 196, 106766. [Google Scholar] [CrossRef]
- Lars, L.; Kimb, J. Path planning of cooperating industrial robots using evolutionary Algorithms. Robot. Comput. Integer. Manuf. 2021, 67, 102053. [Google Scholar] [CrossRef]
- Bai, X.; Li, B.; Xu, X.; Xiao, Y. USV path planning algorithm based on plant growth. Ocean Eng. 2023, 273, 113965. [Google Scholar] [CrossRef]
- Wu, Y. Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV)and an autonomous underwater vehicle (AUV) in an underwater target strike mission. Ocean Eng. 2019, 182, 162–173. [Google Scholar] [CrossRef]
- Ammar, A.; Bennaceur, H.; Chaari, I.; Koubaa, A.; Alajlan, M. Relaxed Dijkstra and A* with linear complexity for robot path planning problems in large scale grid environments. Soft Comput. 2016, 20, 4149–4171. [Google Scholar] [CrossRef]
- Guo, B.; Kuang, Z.; Guan, J.; Hu, M.; Rao, L.; Sun, X. An improved a-star algorithm for complete coverage path planning of unmanned ships. Int. J. Pattern Recognit. Artif. Intell. 2022, 36, 2259009. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, Y.; Li, Z.; Yan, X.; Bi, H.; Krolczyk, G. A new coverage path planning algorithm for unmanned surface mapping vehicle based on A-star based searching. Appl. Ocean Res. 2022, 123, 103163. [Google Scholar] [CrossRef]
- Wang, C.; Wang, L.; Qin, J.; Wu, Z.; Duan, L.; Li, Z.; Wang, Q. Path planning of automated guided vehicles based on improved A-Star algorithm. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2071–2076. [Google Scholar]
- Daniel, K.; Nash, A.; Koenig, S.; Felner, A. Theta*: Any-angle path planning on grids. J. Artif. Intell. Res. 2010, 39, 533–579. [Google Scholar] [CrossRef]
- Gan, L.; Yan, Z.; Zhang, L.; Liu, K.; Zheng, Y.; Zhou, C.; Shu, Y. Ship path planning based on safety potential field in inland rivers. Ocean Eng. 2022, 260, 111928. [Google Scholar] [CrossRef]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Xie, L.; Xue, S.; Zhang, J.; Zhang, M.; Tian, W.; Haugen, S. A path planning approach based on multi-direction A* algorithm for ships navigating within wind farm waters. Ocean Eng. 2019, 184, 311–322. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R. Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment. Ocean Eng. 2015, 97, 126–144. [Google Scholar] [CrossRef]
- Zhou, L.F.; Kong, M.Y. 3D obstacle-avoidance for an unmanned aerial vehicle based on the improved artificial potential field method. J. East China Norm. Univ. (Nat. Sci.) 2022, 2022, 54–67. [Google Scholar]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An improved artificial potential field method for path planning and formation control of the multi-UAV systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1129–1133. [Google Scholar] [CrossRef]
- Wang, N.; Xu, H.; Li, C.; Yin, J.C. Hierarchical path planning of unmanned surface vehicles: A fuzzy artificial potential field approach. Int. J. Fuzzy Syst. 2020, 23, 1797–1808. [Google Scholar] [CrossRef]
- Zeng, Z.; Sammut, K.; Lian, L.; He, F.; Lammas, A.; Tang, Y. A comparison of optimization techniques for AUV path planning in environments with ocean currents. Robot. Auton. Syst. 2016, 82, 61–72. [Google Scholar] [CrossRef]
- Yoo, B.; Kim, J. Path optimization for marine vehicles in ocean currents using reinforcement learning. J. Mar. Sci. Technol. 2016, 21, 334–343. [Google Scholar] [CrossRef]
- Lee, T.; Kim, H.; Chung, H.; Bang, Y.; Myung, H. Energy efficient path planning for a marine surface vehicle considering heading angle. Ocean Eng. 2015, 107, 118–131. [Google Scholar] [CrossRef]
- Subramani, D.N.; Lermusiaux, P.F. Energy-optimal path planning by stochastic dynamically orthogonal level-set optimization. Ocean Model. 2016, 100, 57–77. [Google Scholar] [CrossRef]
- Gao, B.; Xu, D.; Zhang, F.; Yan, W. Method of Designing Optimal Smooth Way for Vehicle. J. Syst. Simul. 2010, 22, 957–961. [Google Scholar]
- Liu, Y.; Gu, Y.; Li, X. Optimal design of path algorithm for unmanned surface vessel under complex sea conditions. J. Mil. Transp. Univ. 2021, 23, 83–87. [Google Scholar]
- Ma, Y.; Hu, M.; Yan, X. Multi-objective path planning for unmanned surface vehicle with currents effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [CrossRef]
- Ma, Y.; Mao, Z.; Wang, T.; Qin, J.; Ding, W.; Meng, X. Obstacle avoidance path planning of unmanned submarine vehicle in ocean current environment based on improved firework-ant colony algorithm. Comput. Electr. Eng. 2020, 87, 106773. [Google Scholar] [CrossRef]
- Xu, P.; Ding, X.; Cao, Q. Research on global path planning of unmanned surface vehicle based on environmental optimization. Shipbuild. China 2022, 63, 206–220. [Google Scholar]
- Yu, J.; Chen, Z.; Zhao, Z.; Yao, P.; Xu, J. A traversal multi-target path planning method for multi-unmanned surface vessels in space-varying ocean current. Ocean Eng. 2023, 278, 114423. [Google Scholar] [CrossRef]
- MahmoudZadeh, S.; Abbasi, A.; Yazdani, A.; Wang, H.; Liu, Y. Uninterrupted path planning system for Multi-USV sampling mission in a cluttered ocean environment. Ocean Eng. 2022, 254, 111328. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Achieving optimal-dynamic path planning for unmanned surface vehicles: A rational multi-objective approach and a sensory-vector re-planner. Ocean Eng. 2023, 286, 115433. [Google Scholar] [CrossRef]
- Liu, C.; Mao, Q.; Chu, X.; Xie, S. An improved A-star algorithm considering water current, traffic separation and berthing for vessel path planning. Appl. Sci. 2019, 9, 1057. [Google Scholar] [CrossRef]
- Xie, X.; Liu, C.; Wei, Z. Ship path planning in complex water areas under the influence of marine meteorological environment. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2021, 40, 1–7, 20. [Google Scholar]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef]
- Xie, X.; Wang, Y.; He, A.; Pan, W.; Xu, X. Ship path planning and algorithm considering the effect of wind, wave and current. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2022, 41, 1–8. [Google Scholar]
- Wang, F.; Bai, Y.; Zhao, L. Physical Consistent Path Planning for Unmanned Surface Vehicles under Complex Marine Environment. J. Mar. Sci. Eng. 2023, 11, 1164. [Google Scholar] [CrossRef]
- Wang, Y.; Liang, X.; Li, B.; Yu, X. Research and implementation of global path planning for unmanned surface vehicle based on electronic chart. In Recent Developments in Mechatronics and Intelligent Robotics, Proceedings of the International Conference on Mechatronics and Intelligent Robotics (ICMIR2017), Kunming, China, 20–21 May 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 1, pp. 534–539. [Google Scholar]
- Xing, B.; Wang, X.; Yang, L.; Liu, Z.; Wu, Q. An Algorithm of Complete Coverage Path Planning for Unmanned Surface Vehicle Based on Reinforcement Learning. J. Mar. Sci. Eng. 2023, 11, 645. [Google Scholar] [CrossRef]
- Alvarez, A.; Caiti, A.; Onken, R. Evolutionary path planning for autonomous underwater vehicles in a variable ocean. IEEE J. Ocean. Eng. 2004, 29, 418–429. [Google Scholar] [CrossRef]
- Hu, D.; Chen, X.; Zhang, S.; Li, Y. Characteristics of tide and residual current south of Dongsha island in South China Sea. J. Army Eng. Univ. PLA (Chin.) 2015, 16, 368–373. [Google Scholar]
- Hu, S.; Xiao, S.; Yang, J.; Zhang, Z.; Zhang, K.; Zhu, Y.; Zhang, Y. AUV Path Planning Considering Ocean Current Disturbance Based on Cloud Desktop Technology. Sensors 2023, 23, 7510. [Google Scholar] [CrossRef] [PubMed]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing | Opposite Node |
|---|---|
| (0°~90°) | 4, 6, 7 |
| (90°~180°) | 5, 7, 8 |
| (180°~270°) | 2, 3, 5 |
| (270°~360°) | 1, 2, 4 |
| Algorithms | Path Length/m | Min. Distance to Obstacle/m | Running Time/s | Turning Points |
|---|---|---|---|---|
| Original A* | 7325.2 | 0 | 9.1 | 16 |
| APF | 7341.2 | 44.2 | 19.2 | 7 |
| PSO | 7570.6 | 0 | 41.6 | 2 |
| RRT | 9553.2 | 252.6 | 13.8 | 28 |
| Improved A* | 7442.4 | 141.4 | 7.8 | 13 |
| Algorithm | Path Length/m | Min. Distance to Obstacle/m | Running Time/s | Turning Points |
|---|---|---|---|---|
| Original A* | 6512.8 | 0 | 6.7 | 13 |
| APF | - | - | - | - |
| PSO | 6624.8 | 44.8 | 8.5 | 3 |
| RRT | 9040.8 | 204.8 | 5.3 | 22 |
| Improved A* | 6724.4 | 136.4 | 4.8 | 8 |
| Current Speed/ | Path Length/m | Shortest Distance/m | Running Time/s |
|---|---|---|---|
| 0.2 | 7559.6 | 62.4 | 17.6 |
| 0.6 | 7559.6 | 152.6 | 15.6 |
| 1 | 8359.6 | 116.8 | 13.5 |
| Current Speed/ | Path Length/m | Shortest Distance/m | Running Time/s |
|---|---|---|---|
| 0.2 | 8040.2 | 184.6 | 15.2 |
| 0.6 | 7559.6 | 104.8 | 14.5 |
| 1 | 7442.4 | 72.4 | 16.8 |
| Current Speed/ | Path Length/m | Shortest Distance/m | Running Time/s |
|---|---|---|---|
| 0.2 | 7142.4 | 65.6 | 4.8 |
| 0.6 | 7158.2 | 88.2 | 4.9 |
| 1 | 6959.6 | 184.8 | 4.7 |
| Current Speed/ | Path Length/m | Shortest Distance/m | Running Time/s |
|---|---|---|---|
| 0.2 | 7158.6 | 62.2 | 4.7 |
| 0.6 | 7076.8 | 148.2 | 5.4 |
| 1 | 7206.8 | 183.8 | 4.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Pan, J.; Wei, K.; Lu, M.; Jia, S. A Novel Unmanned Surface Vehicle Path-Planning Algorithm Based on A* and Artificial Potential Field in Ocean Currents. J. Mar. Sci. Eng. 2024, 12, 285. https://doi.org/10.3390/jmse12020285
Yang C, Pan J, Wei K, Lu M, Jia S. A Novel Unmanned Surface Vehicle Path-Planning Algorithm Based on A* and Artificial Potential Field in Ocean Currents. Journal of Marine Science and Engineering. 2024; 12(2):285. https://doi.org/10.3390/jmse12020285
Chicago/Turabian StyleYang, Chaopeng, Jiacai Pan, Kai Wei, Mengjie Lu, and Shihao Jia. 2024. "A Novel Unmanned Surface Vehicle Path-Planning Algorithm Based on A* and Artificial Potential Field in Ocean Currents" Journal of Marine Science and Engineering 12, no. 2: 285. https://doi.org/10.3390/jmse12020285
APA StyleYang, C., Pan, J., Wei, K., Lu, M., & Jia, S. (2024). A Novel Unmanned Surface Vehicle Path-Planning Algorithm Based on A* and Artificial Potential Field in Ocean Currents. Journal of Marine Science and Engineering, 12(2), 285. https://doi.org/10.3390/jmse12020285