
Numerical Simulation and Design of a Shaftless Hollow Pump for Plankton Sampling


Abstract
1. Introduction
2. Design Principles
3. Sample Pump Numerical Model
3.1. Governing Equations and Turbulence Models
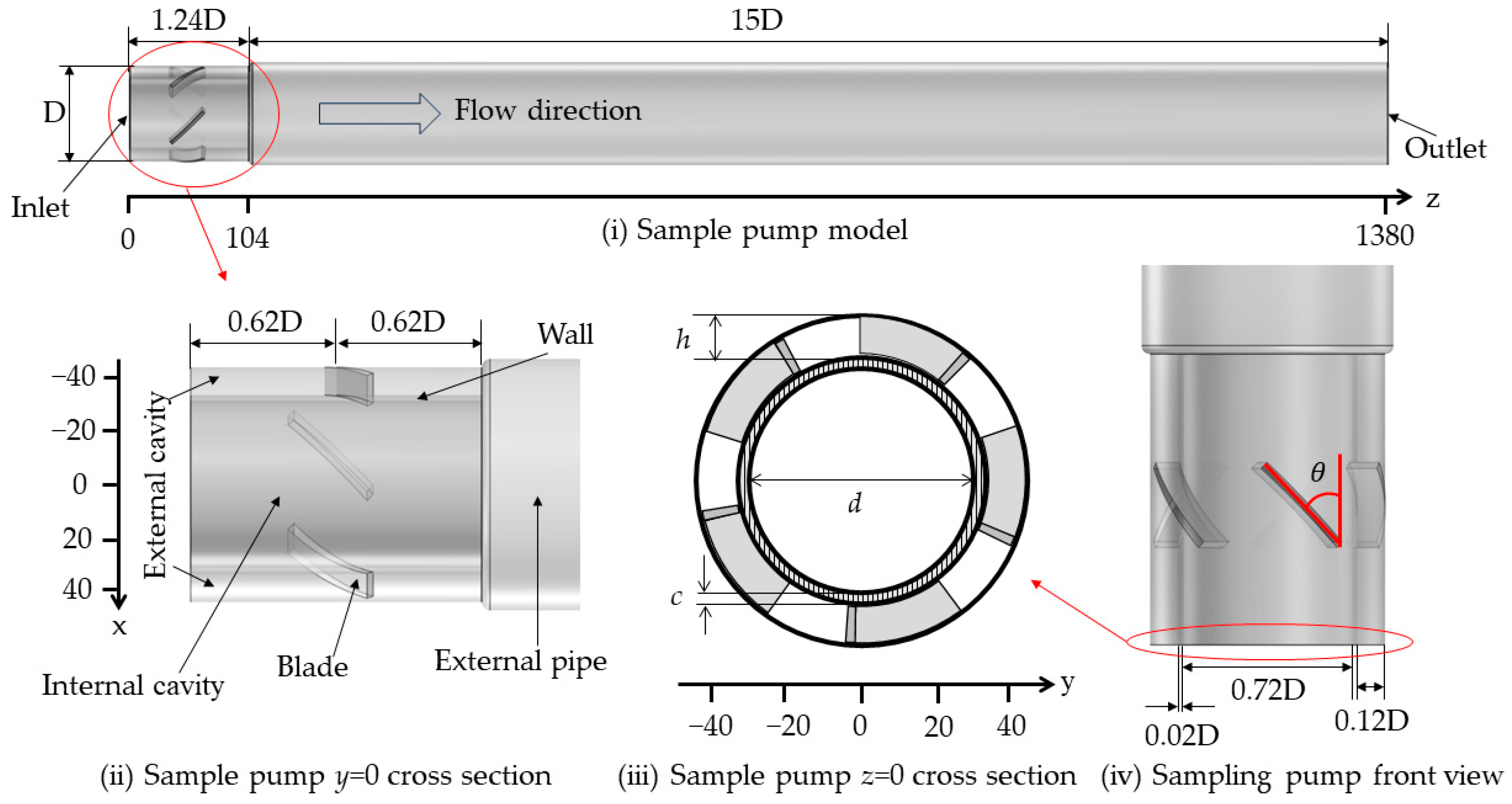
3.2. Geometric Models and Boundary Conditions
3.3. Grid Independence Test
3.4. Time Independent Analysis
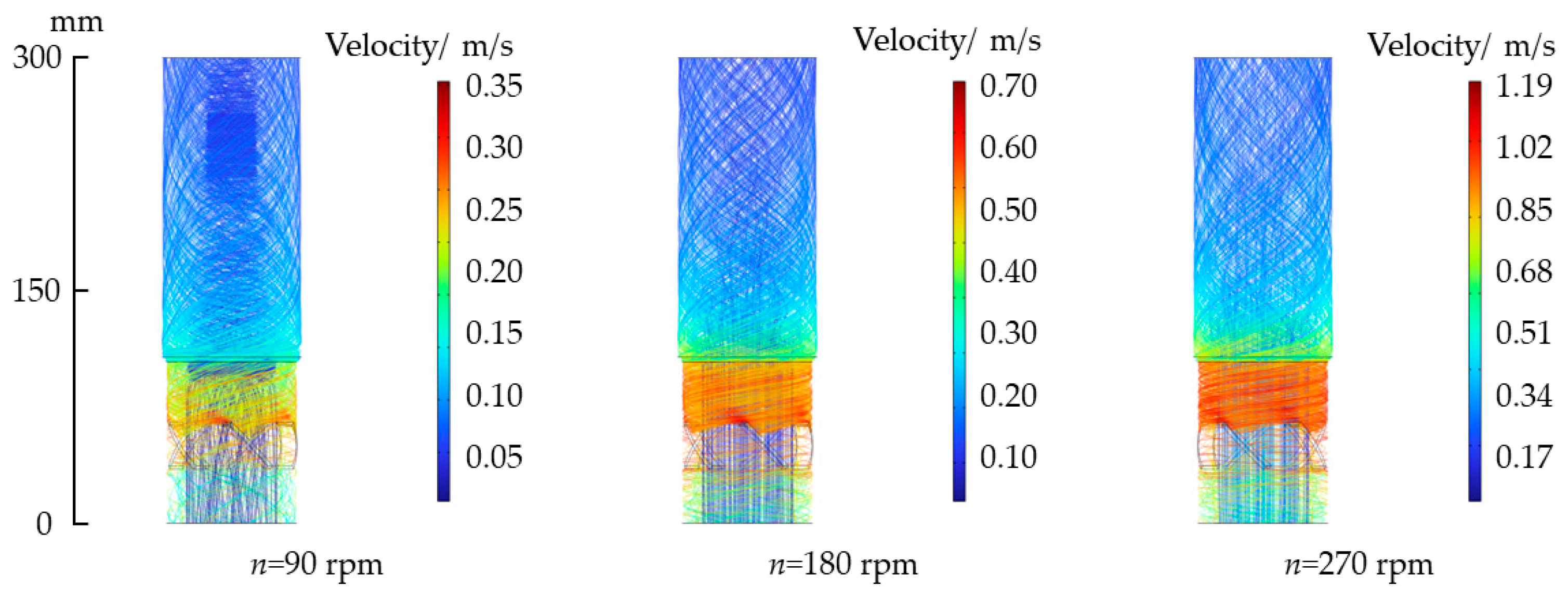
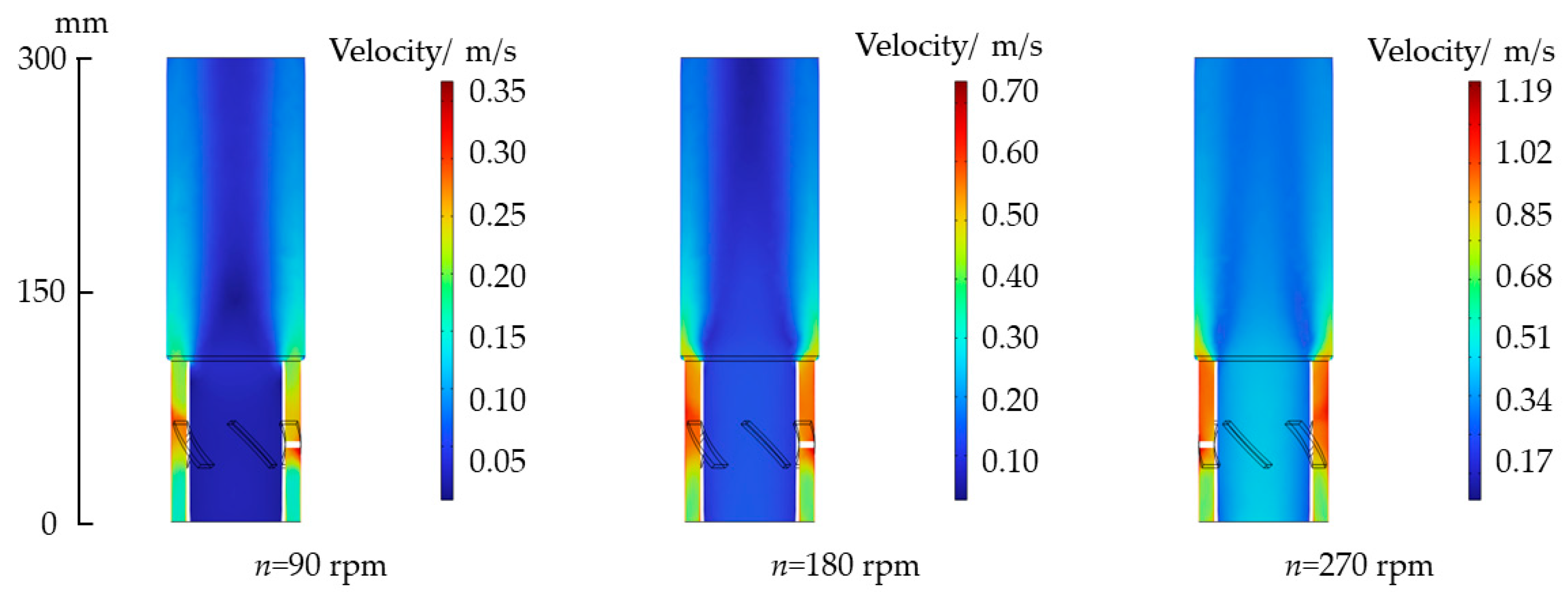
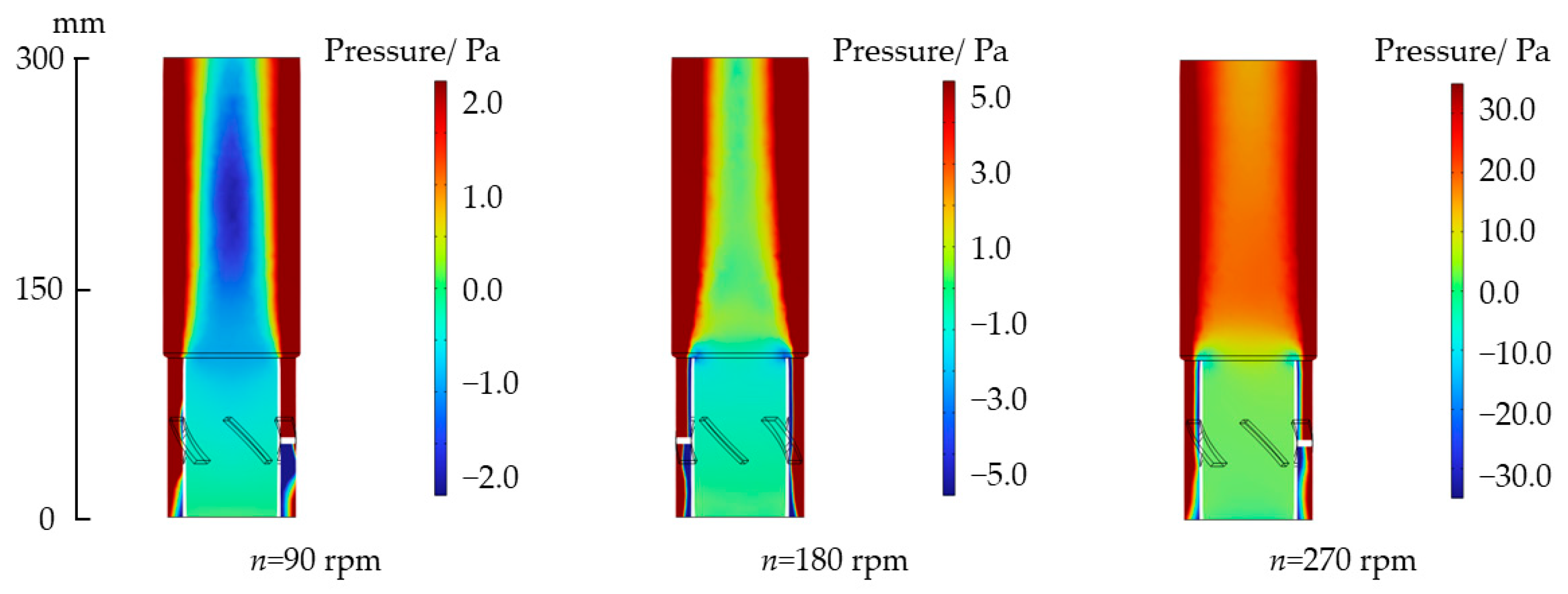
4. Effects of Rotational Speed on the Flow Rate
5. Effects of Structural Parameters on the Flow Rate at the Internal Cavity Inlet
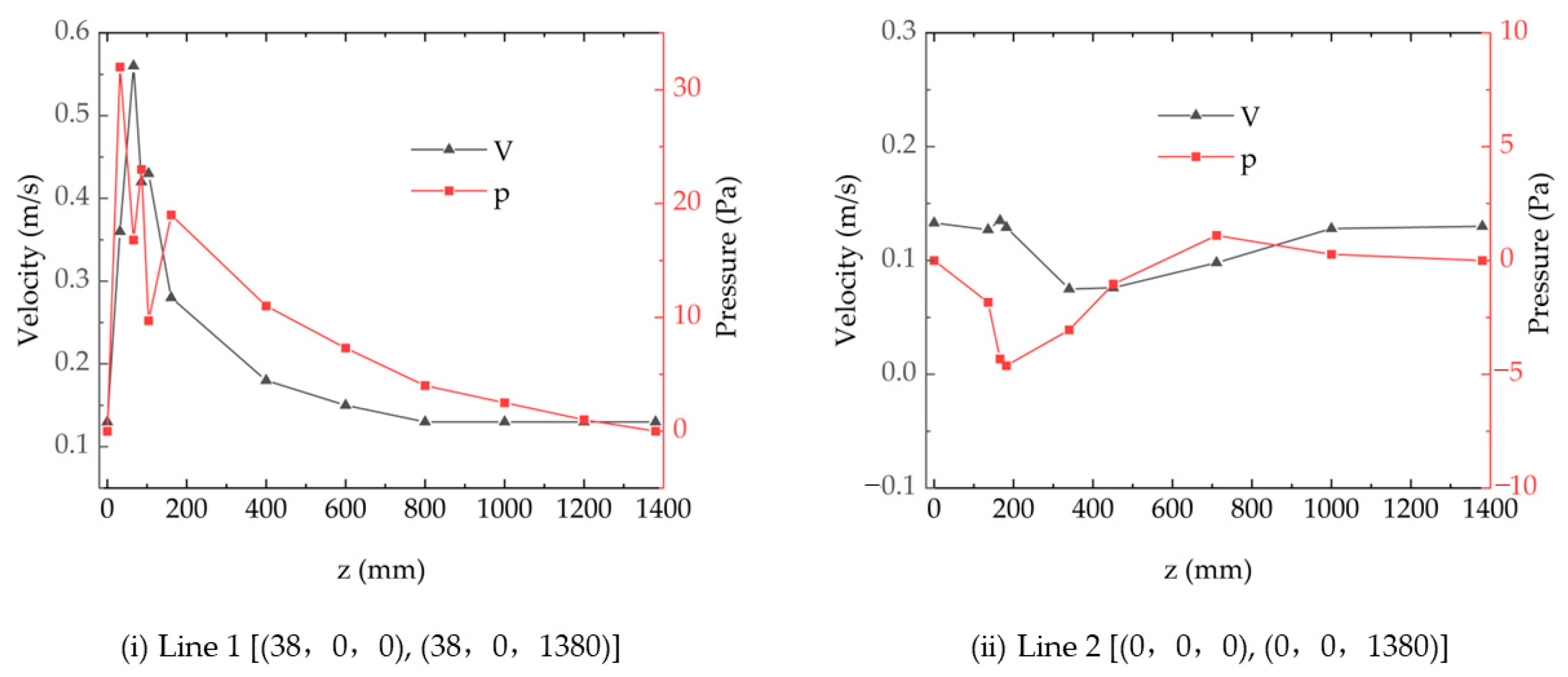
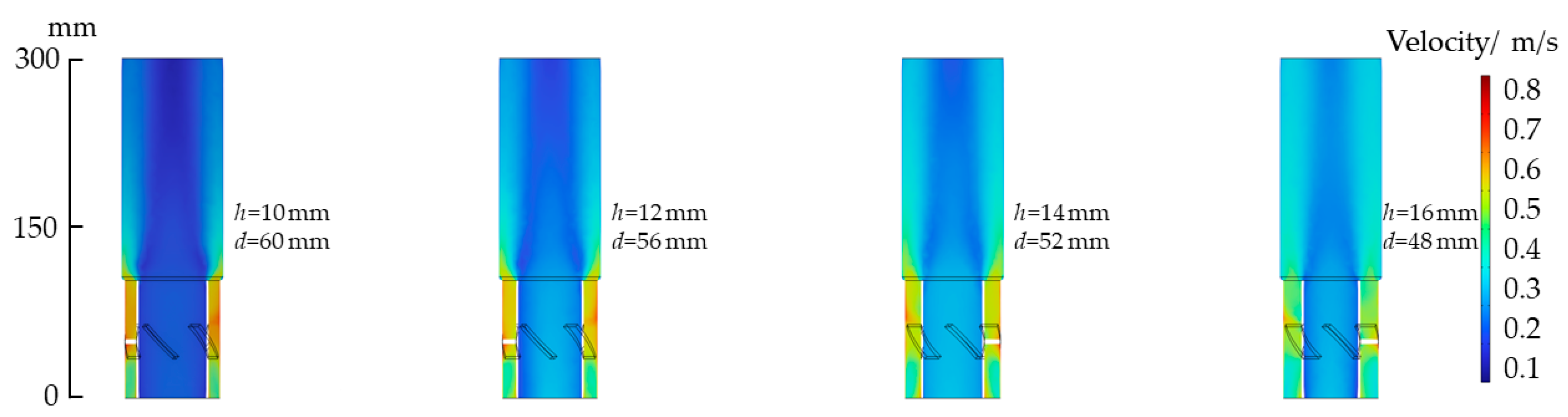
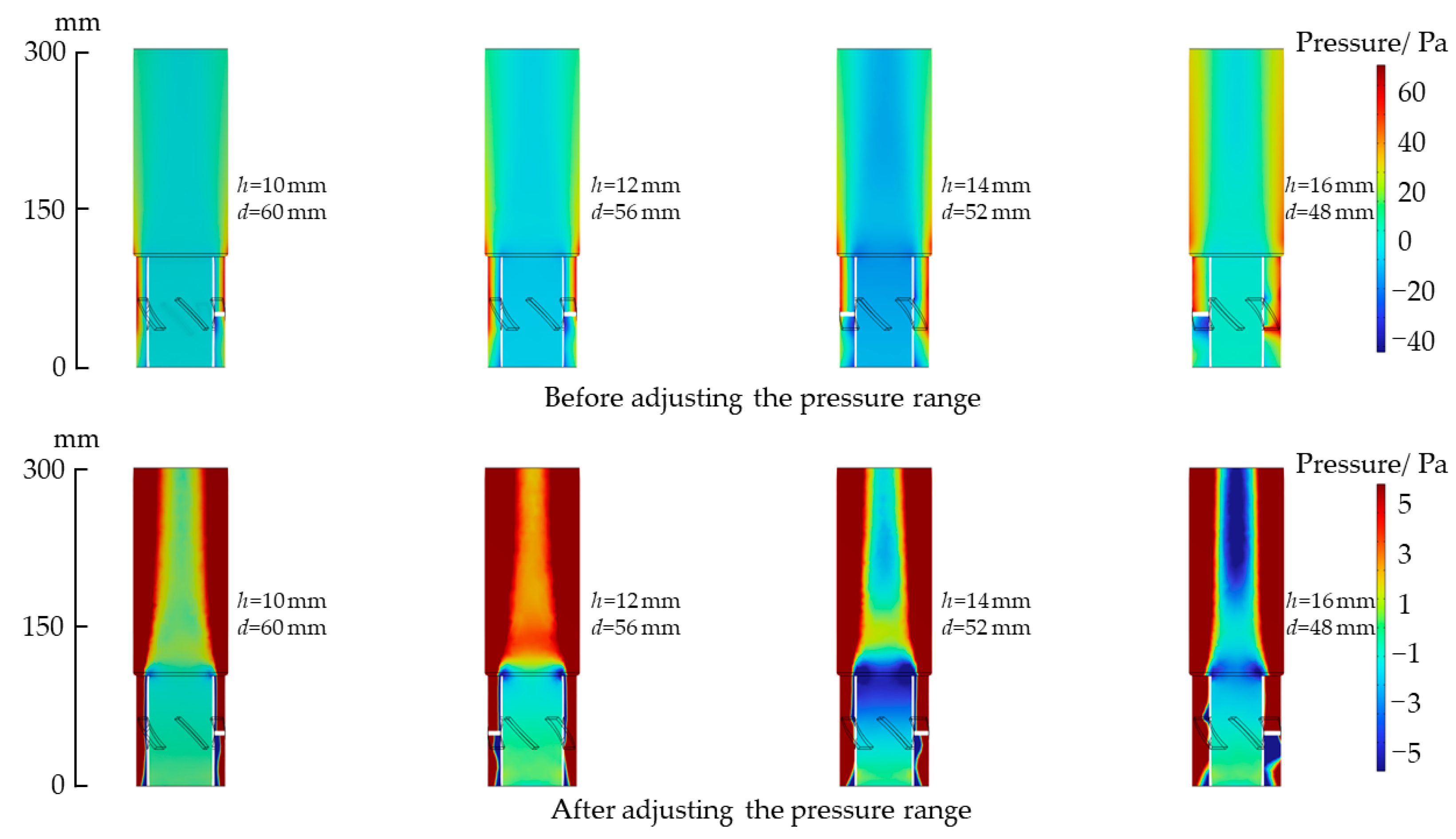
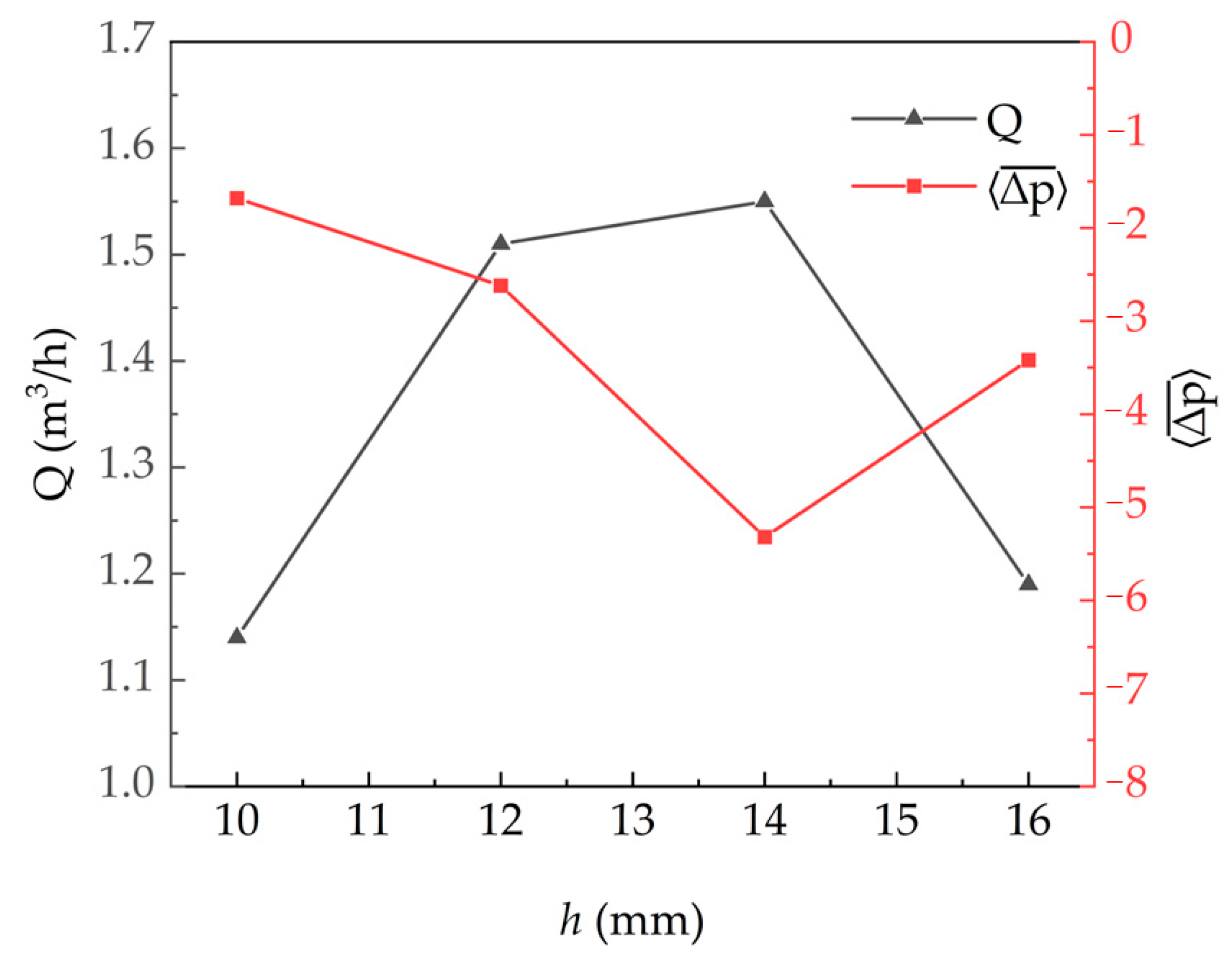
5.1. Effects of Internal and External Cavity Size on the Inlet Flow Rate
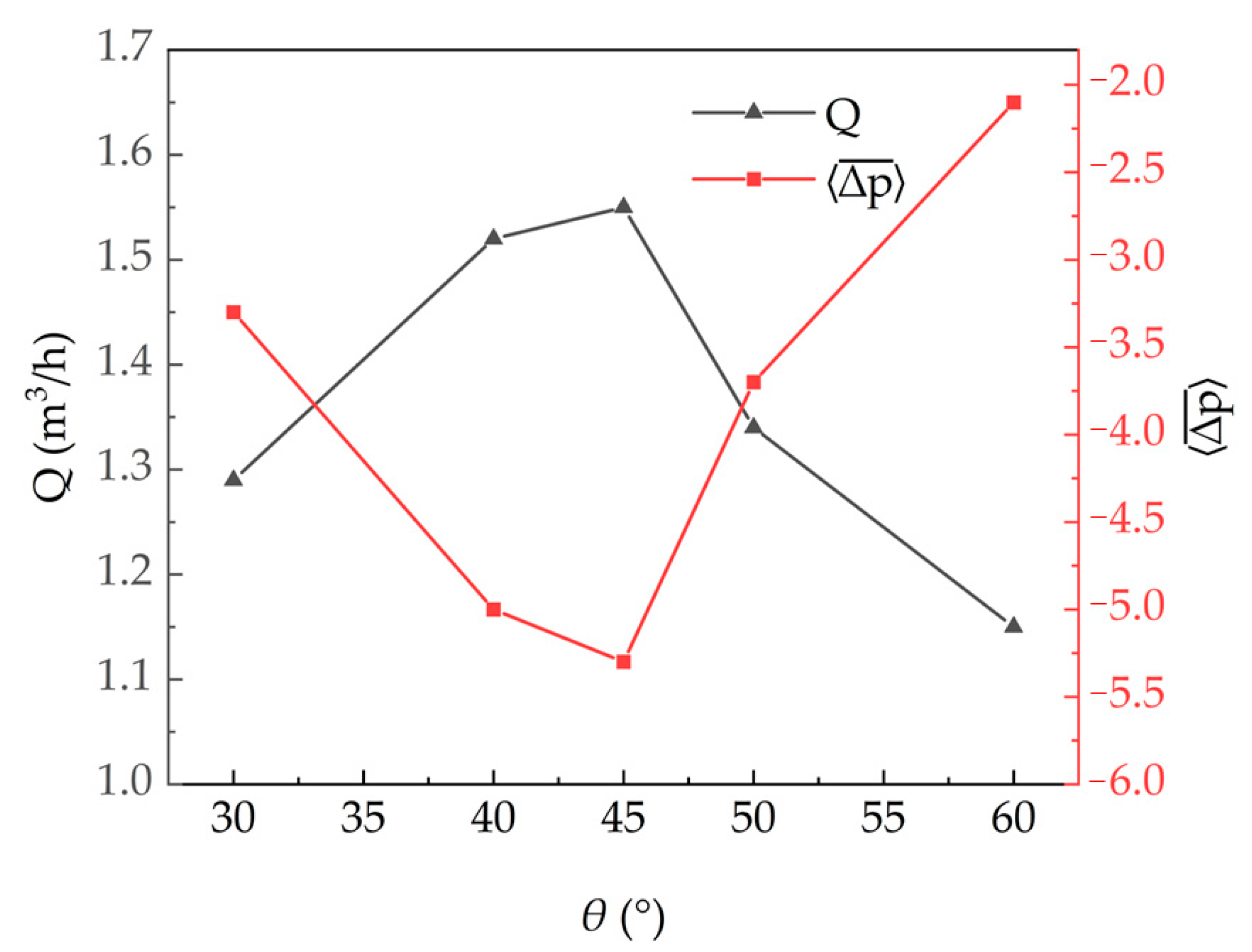
5.2. Effects of Blade Angle on the Flow Rate at the Internal Cavity Inlet
5.3. Effects of Blade Numbers on the Flow Rate at the Internal Cavity Inlet
6. Instrument Design and Experiment Verification
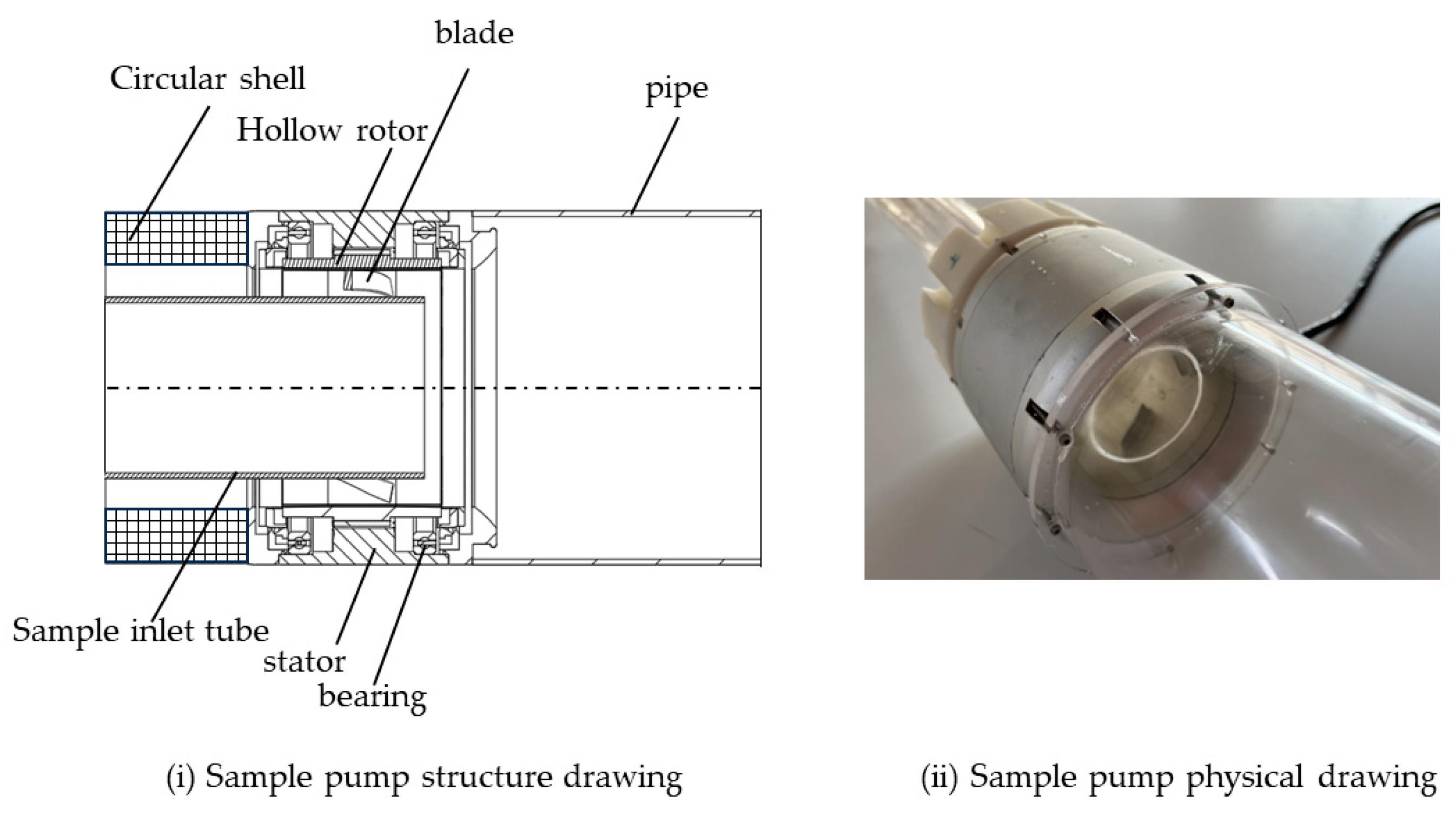
6.1. Shaftless Hollow Pump Design
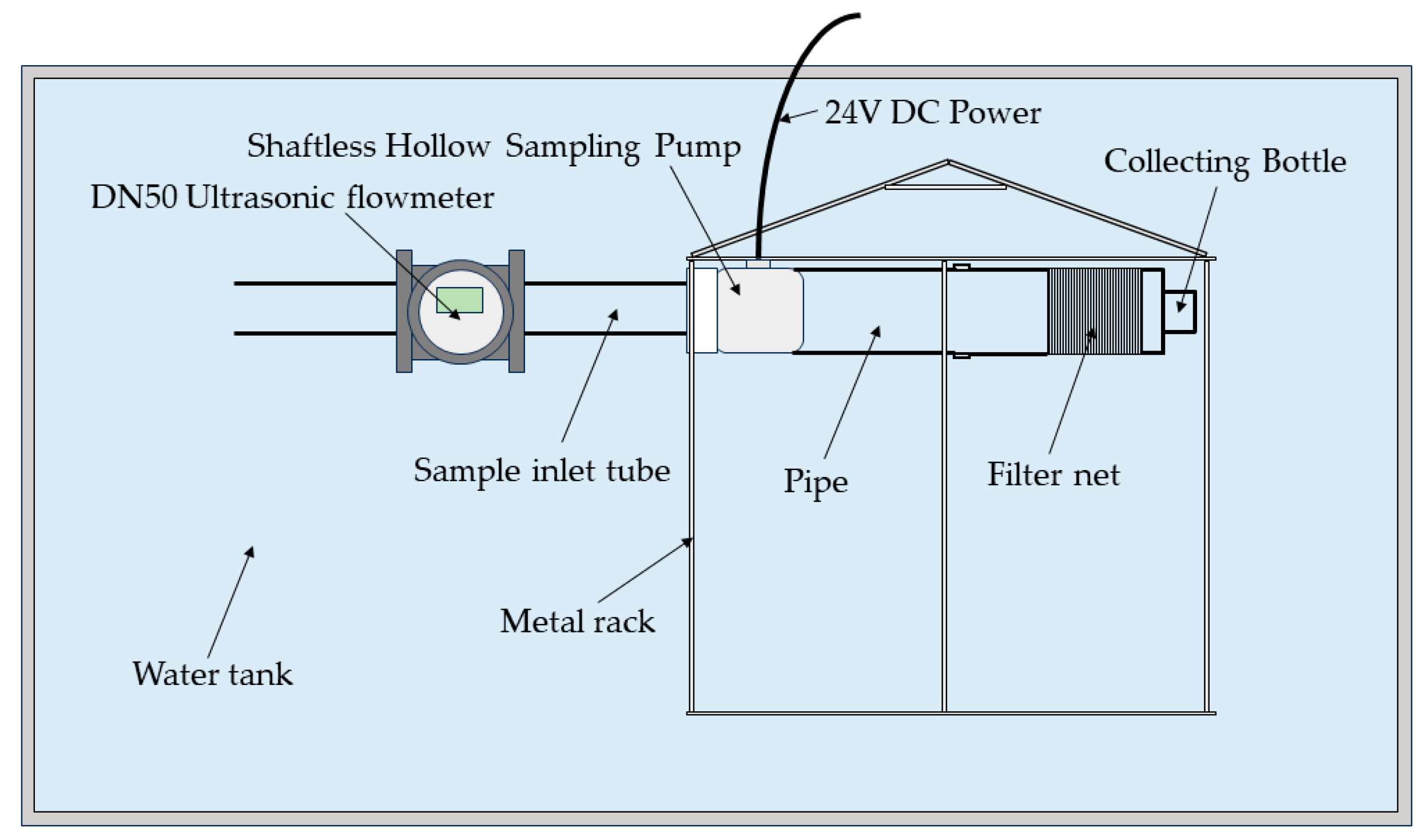
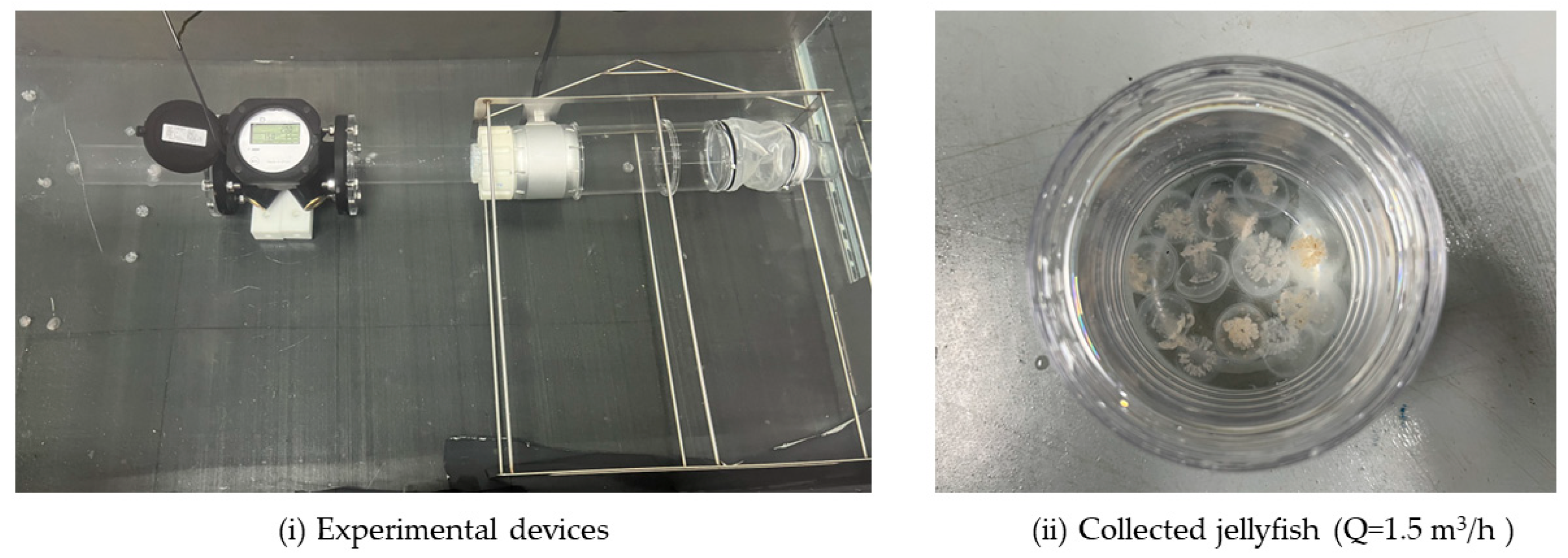
6.2. Experiment Verification
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Drits, A.V.; Pasternak, A.F.; Kravchishina, M.D. The Role of Plankton in the Vertical Flux in the East Siberian Sea Shelf. Oceanology 2019, 59, 669–677. [Google Scholar] [CrossRef]
- Gruber, A.; Medlin, L.K. Complex Plastids and the Evolution of the Marine Phytoplankton. J. Mar. Sci. Eng. 2023, 11, 1903. [Google Scholar] [CrossRef]
- Ostle, C.; Paxman, K.; Graves, C.A. The Plankton Lifeform Extraction Tool: A digital tool to increase the discoverability and usability of plankton time-series data. Earth Syst. Sci. Data 2021, 13, 5617–5642. [Google Scholar] [CrossRef]
- Nishikawa, J.; Tsuda, A. Diel vertical migration of the tunicate Salpa thompsoni in the Southern Ocean during summer. Polar Biol. 2001, 24, 299–302. [Google Scholar] [CrossRef]
- Weibo, P.H.; Morton, A.W.; Bradley, A.M. New development in the MOCNESS, an apparatus for sampling zooplankton and micronekton. Mar. Biol. 1985, 87, 313–323. [Google Scholar]
- Weibo, P.H.; Burt, K.H.; Boyd, S.H. A multiple opening closing net and environmental sensing system for sampling zoo plankton. J. Mar. Res. 1976, 34, 313–326. [Google Scholar]
- Strand, E.; Broms, C.; Bagoien, E. Comparison of two multiple plankton samplers: MOCNESS and Multinet Mammoth. Limnol. Oceanogr. Methods 2022, 20, 595–604. [Google Scholar] [CrossRef]
- Kilburn, R.; Bricknell, I.R.; Cook, P. Design and application of a portable, automated plankton sampler for the capture of the parasitic copepods Lepeophtheirus salmonis (Kr circle divide yer 1837) and Caligus elongatus (Von Nordmann 1832). J. Plankton Res. 2010, 32, 967–970. [Google Scholar] [CrossRef]
- Guillam, M.; Bessin, C. Vertical distribution of brittle star larvae in two contrasting coastal embayments: Implications for larval transport. Sci. Rep. 2020, 10, 12033. [Google Scholar] [CrossRef]
- Weidberg, N.; Goschen, W.; Jackson, J.M. Fine scale depth regulation of invertebrate larvae around coastal fronts. Limnol. Oceanogr. 2019, 64, 785–802. [Google Scholar] [CrossRef]
- Wilborn, R.E.; Rooper, C.N.; Goddard, P. A novel design for sampling benthic zooplankton communities in disparate Gulf of Alaska habitats using an autonomous deep-water plankton pump. J. Plankton Res. 2020, 42, 457–466. [Google Scholar] [CrossRef]
- Billings, A.; Kaiser, C.; Young, C.M. SyPRID sampler: A large-volume, high-resolution, autonomous, deep-ocean precision plankton sampling system. Deep. Sea Res. Part II-Top. Stud. Oceanogr. 2017, 137, 297–306. [Google Scholar] [CrossRef]
- Zhou, L.; Bai, L.; Li, W.; Shi, W.; Wang, C. PIV validation of different turbulence models used for numerical simulation of a centrifugal pump diffuser. Eng. Comput. 2018, 35, 2–17. [Google Scholar] [CrossRef]
- Zhou, L.; Hang, J.; Bai, L.; Krzemianowski, Z.; El-Emam, M.A.; Yasser, E.; Agarwal, R. Application of entropy production theory for energy losses and other investigation in pumps and turbines: A review. Appl. Energy 2022, 318, 119211. [Google Scholar] [CrossRef]
- Fracassi, A.; De Donno, R.; Ghidoni, A.; Noventa, G. Assessment of an Improved Delayed X-LES Hybrid Model for the Study of Off-Design Conditions in Centrifugal Pumps. J. Fluids Eng. 2022, 144, 101501. [Google Scholar] [CrossRef]
- El-Emam, M.; Zhou, L.; Yasser, E.; Bai, L.; Shi, W. Computational methods of erosion wear in centrifugal pump: A state-of-the-art review. Arch. Comput. Methods Eng. 2022, 29, 3789–3814. [Google Scholar] [CrossRef]
- Shih, T.H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A New k-ε Eddy-Viscosity Model for High Reynolds Number Turbulent Flows—Model Development and Validation. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Launder, B.E.; Spalding, D.B. Lectures in Mathematical Models of Turbulence; Academic Press: Cambridge, MA, USA, 1972. [Google Scholar]
- Orszag, S.A.; Yakhot, V.; Flannery, W.S.; Boysan, F.; Choudhury, D.; Maruzewski, J.; Patel, B. Renormalization Group Modeling and Turbulence Simulations. In Proceedings of the International Conference on Near-Wall Turbulent Flows, Tempe, AZ, USA, 15–17 March 1993. [Google Scholar]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998. [Google Scholar]
- Menter, F.R. Two-Equation Eddy-Viscosity Turbulence Models for Engineering Applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- De Donno, R.; Fracassi, A.; Ghidoni, A.; Morelli, A.; Noventa, G. Surrogate-Based Optimization of a Centrifugal Pump with Volute Casing for an Automotive Engine Cooling System. Appl. Sci. 2021, 11, 11470. [Google Scholar] [CrossRef]
- De Donno, R.; Fracassi, A.; Noventa, G.; Ghidoni, A.; Bebay, S. Surrogate-based shape optimization of centrifugal pumps for automotive engine cooling systems. In Advances in Evolutionary and Deterministic Methods for Design, Optimization and Control in Engineering and Sciences; Springer: Cham, Switzerland, 2021; pp. 277–290. [Google Scholar]
- Guo, R.; Li, R.; Zhang, R.; Han, W. Numerical Study of the Unsteady Flow Characteristics of a Jet Centrifugal Pump under Multiple Conditions. Processes 2019, 7, 786. [Google Scholar] [CrossRef]
- Wang, C.S.; Zhang, L. Fluid simulation in a cyclone reverse circulation well washing device based on computational fluid dynamics. Energy Sci. Eng. 2019, 7, 1306–1314. [Google Scholar] [CrossRef]
- Agrawal, K.K.; Bhardwaj, M.; Misra, R.; Das Agrawal, G.; Bansal, V. Optimization of operating parameters of earth air tunnel heat exchanger for space cooling: Taguchi method approach. Geotherm. Energy 2018, 6, 10. [Google Scholar] [CrossRef]
- Tian, W.; Song, B.; Mao, Z. Conceptual design and numerical simulations of a vertical axis water turbine used for underwater mooring platforms. Int. J. Nav. Archit. Ocean. Eng. 2013, 5, 625–634. [Google Scholar]
- Li, R.; Gong, J.; Chen, W.; Li, J.; Chai, W.; Rheem, C.k.; Li, X. Numerical Investigation of Vortex-Induced Vibrations of a Rotating Cylinder near a Plane Wall. J. Mar. Sci. Eng. 2023, 11, 1202. [Google Scholar] [CrossRef]
- Chen, C.; Song, Y.L.; Xie, Y.D. Simulation and analysis of inclined flow channel of hydraulic slide valve. J. Phys. Conf. Ser. 2020, 1707, 012011. [Google Scholar] [CrossRef]
- Lin, Z.; Yang, F.; Guo, J.; Jian, H.; Sun, S.; Jin, X. Leakage Flow Characteristics in Blade Tip of Shaft Tubular Pump. J. Mar. Sci. Eng. 2023, 11, 1139. [Google Scholar] [CrossRef]
- Jiao, H.; Wang, M.; Liu, H.; Chen, S. Positive and Negative Performance Analysis of the Bi-Directional Full-Flow Pump with an “S” Shaped Airfoil. J. Mar. Sci. Eng. 2023, 11, 1188. [Google Scholar] [CrossRef]
- Feng, H.; Wan, Y.; Fan, Z. Numerical investigation of turbulent cavitating flow in an axial flow pump using a new transport-based model. J. Mech. Sci. Technol. 2020, 34, 745–756. [Google Scholar] [CrossRef]
- Zhu, D.; Yan, W.; Guang, W.; Wang, Z.; Tao, R. Influence of Guide Vane Opening on the Runaway Stability of a Pump-Turbine Used for Hydropower and Ocean Power. J. Mar. Sci. Eng. 2023, 11, 1218. [Google Scholar] [CrossRef]
- Yang, F.; Li, Z.; Hu, W.; Liu, C.; Jiang, D.; Liu, D.; Nasr, A. Analysis of flow loss characteristics of slanted axial-flow pump device based on entropy production theory. R. Soc. Open Sci. 2022, 9, 211208. [Google Scholar] [CrossRef]
- Cui, B.; Han, X.; An, Y. Numerical Simulation of Unsteady Cavitation Flow in a Low-Specific-Speed Centrifugal Pump with an Inducer. J. Mar. Sci. Eng. 2022, 10, 630. [Google Scholar] [CrossRef]
- Duan, X.D.; Sun, X.Q. The Experimental Study on Compositional Parameters of the Annular Multinozzle Jet Pump. Prospect. Eng. 1999, 6, 17–19. [Google Scholar]
- Yuan, D.Q.; Wang, G.J.; Wu, J. Numerical simulation and experiment study on multi-nozzle jet pump. Trans. Agric. Eng. 2008, 24, 95–99. [Google Scholar]
- Yang, C.; Zhang, Q.; Guo, J.; Wu, J.; Zheng, Y.; Ren, Z. Optimal Design and Fish-Passing Performance Analysis of a Fish-Friendly Axial Flow Pump. Appl. Sci. 2023, 13, 12056. [Google Scholar] [CrossRef]
- Zhu, Z.; Liu, H. Experimental Research and Numerical Analysis of Pressure Fluctuation Characteristics of Rim Driven Propulsion Pump Outlet. Machines 2021, 9, 293. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Number of Grid | Q |
|---|---|---|
| Grip 1 | 106,548 | 2.71 m3/h |
| Grip 2 | 140,609 | 3.22 m3/h |
| Grip 3 | 180,542 | 3.50 m3/h |
| Grip 4 | 221,084 | 3.50 m3/h |
| n | F | ||
|---|---|---|---|
| 90 rpm | 0.25 m/s | 0.03 m/s | 0.30 m3/h |
| 180 rpm | 0.51 m/s | 0.13 m/s | 1.30 m3/h |
| 270 rpm | 0.84 m/s | 0.35 m/s | 3.50 m3/h |
| Group | h (mm) | d (mm) | c (mm) |
|---|---|---|---|
| Size 1 | 10 | 60 | 2 |
| Size 2 | 12 | 56 | 2 |
| Size 3 | 14 | 52 | 2 |
| Size 4 | 16 | 48 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, S.; Fan, Z.; Mao, J.; Zheng, M.; Yang, J. Numerical Simulation and Design of a Shaftless Hollow Pump for Plankton Sampling. J. Mar. Sci. Eng. 2024, 12, 284. https://doi.org/10.3390/jmse12020284
Gao S, Fan Z, Mao J, Zheng M, Yang J. Numerical Simulation and Design of a Shaftless Hollow Pump for Plankton Sampling. Journal of Marine Science and Engineering. 2024; 12(2):284. https://doi.org/10.3390/jmse12020284
Chicago/Turabian StyleGao, Shizhen, Zhihua Fan, Jie Mao, Minhui Zheng, and Junyi Yang. 2024. "Numerical Simulation and Design of a Shaftless Hollow Pump for Plankton Sampling" Journal of Marine Science and Engineering 12, no. 2: 284. https://doi.org/10.3390/jmse12020284
APA StyleGao, S., Fan, Z., Mao, J., Zheng, M., & Yang, J. (2024). Numerical Simulation and Design of a Shaftless Hollow Pump for Plankton Sampling. Journal of Marine Science and Engineering, 12(2), 284. https://doi.org/10.3390/jmse12020284