
A Comparative Study on the Structural Response of Multi-Linked Floating Offshore Structure between Digital Model and Physical Model Test for Digital Twin Implementation



Abstract
1. Introduction
2. Distortion Base Mode
2.1. Theoretical Background
2.2. Algorithm for Selecting DBM for Multi-Linked Floating Offshore Structures
3. Prediction of Bending Stress of Multi-Linked Floating Offshore Structure
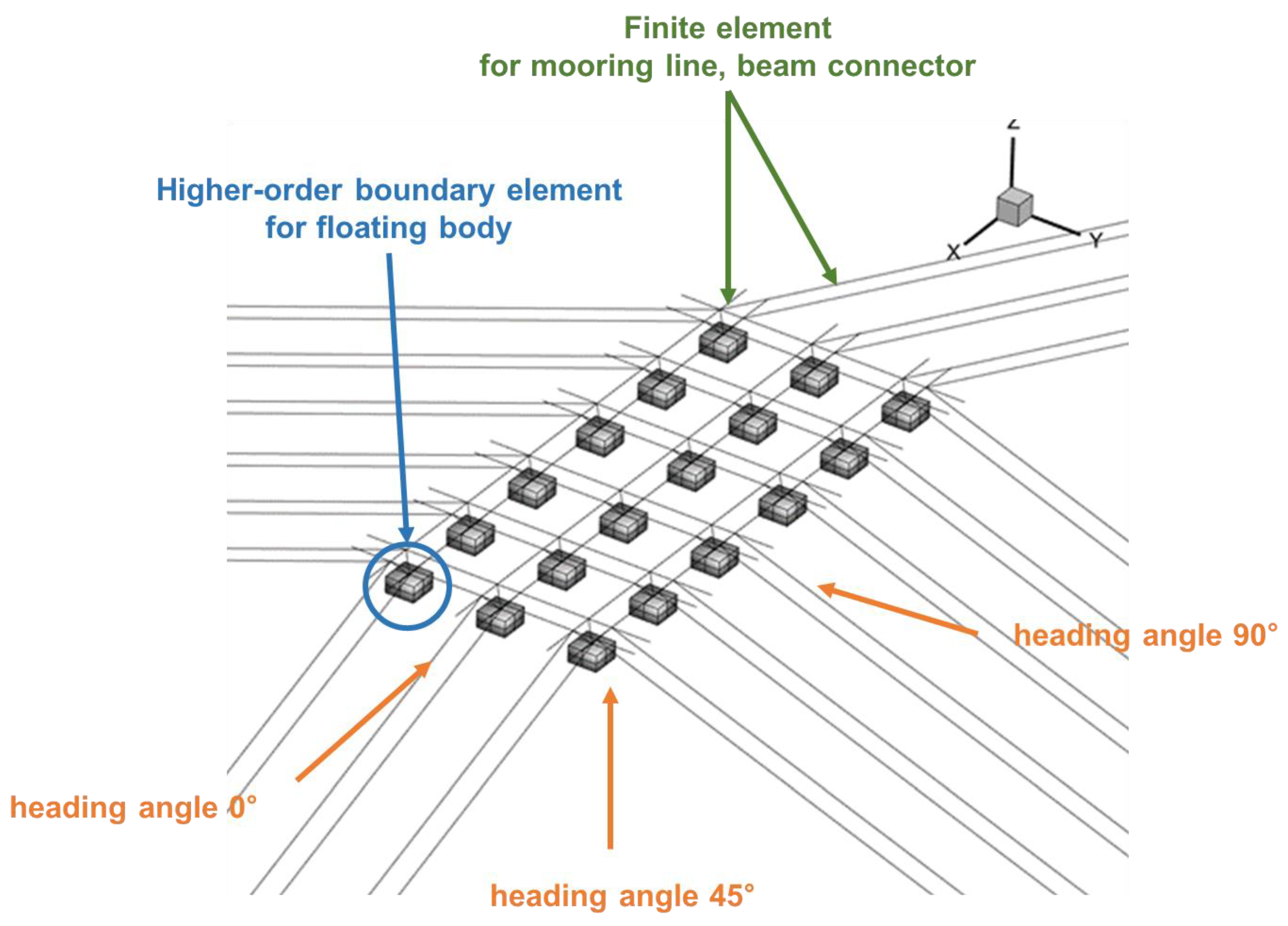
3.1. Fluid-Structure Interaction Numerical Analysis for DBM
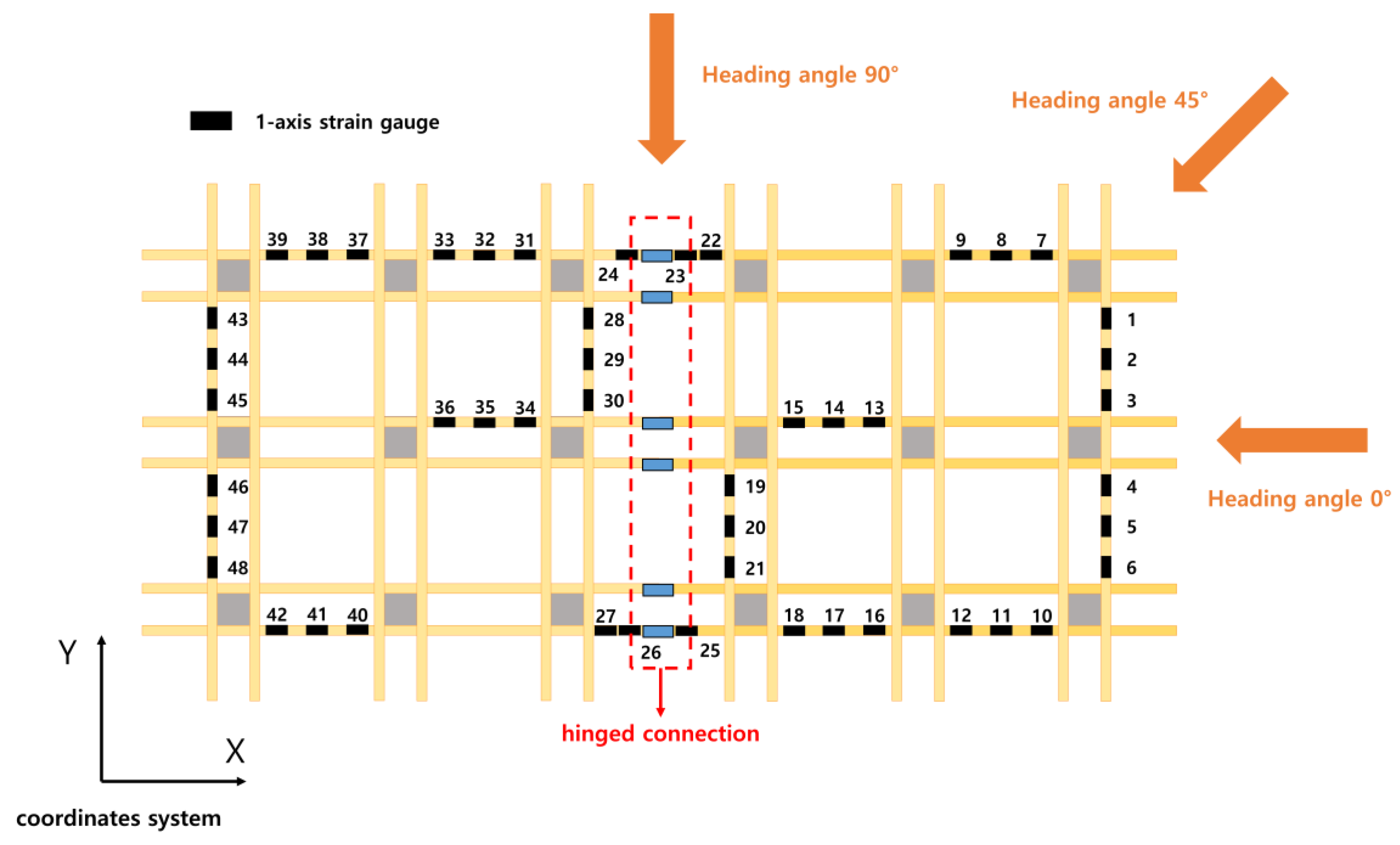
3.2. Model Experiment for Multi-Linked Floating Offshore Structure
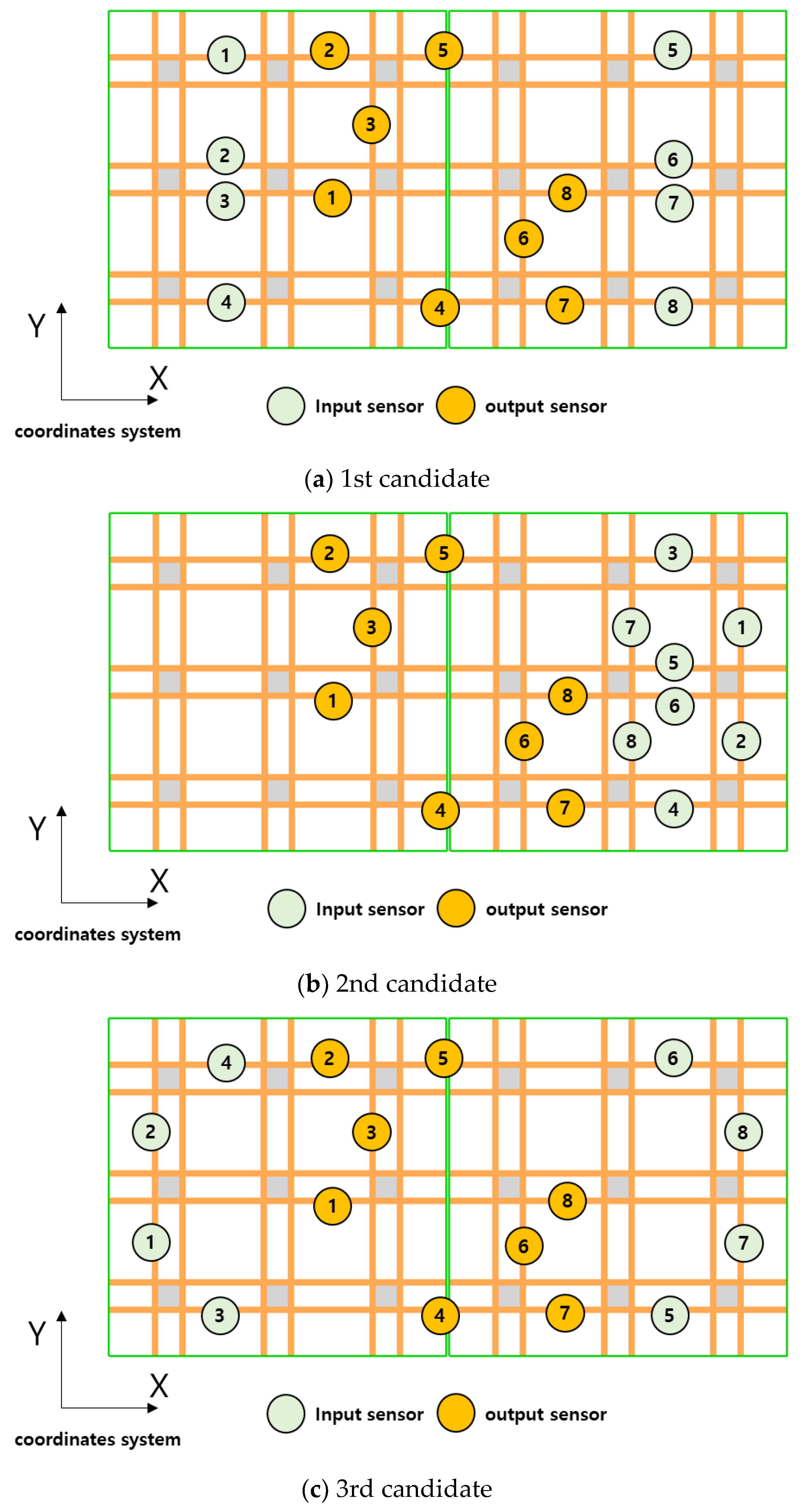
3.3. Setting of Input and Output Elements for DBM Conversion Matrix
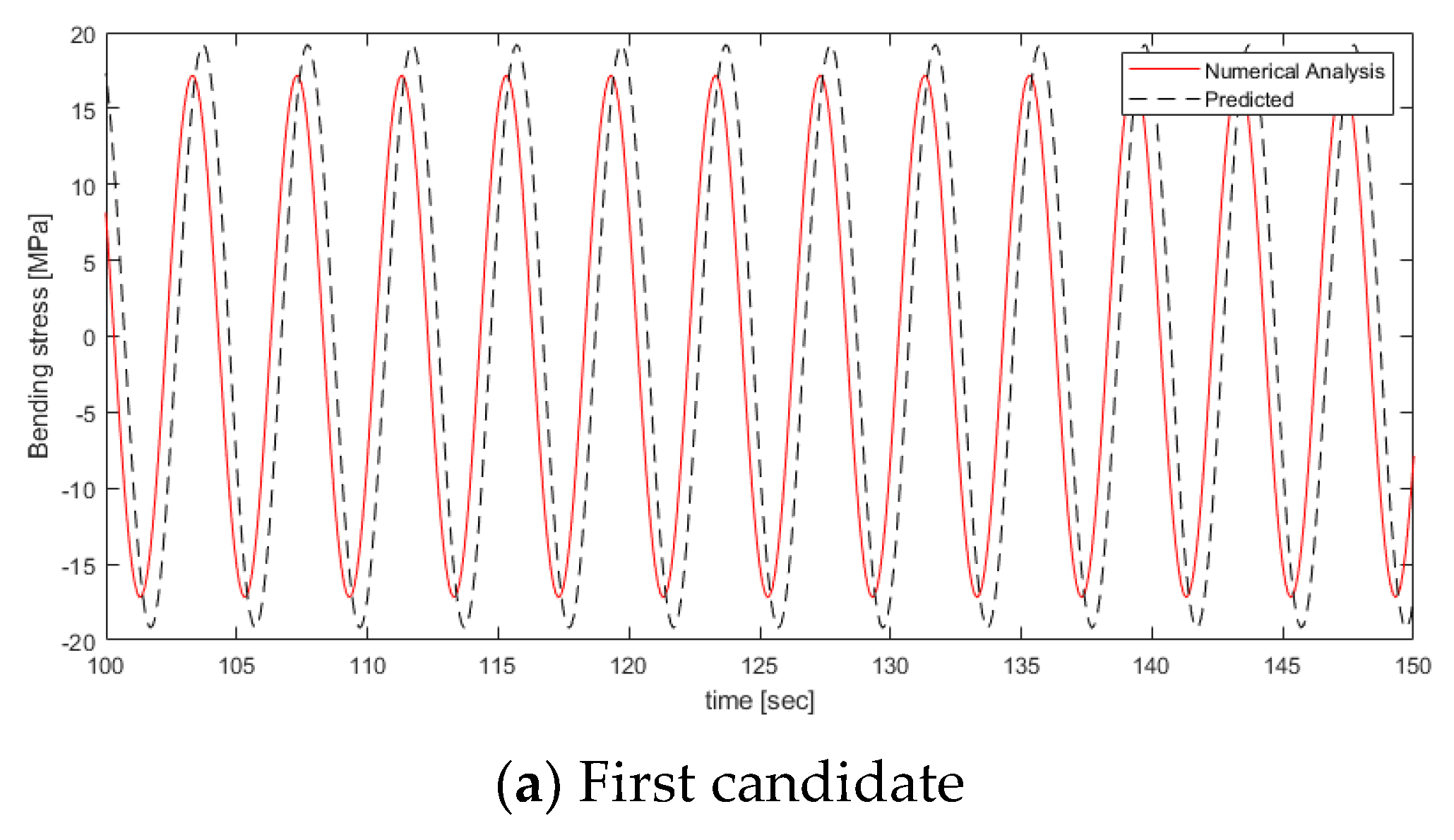
3.4. Predicted Bending Stress through DBM Conversion Matrix
4. Conclusions
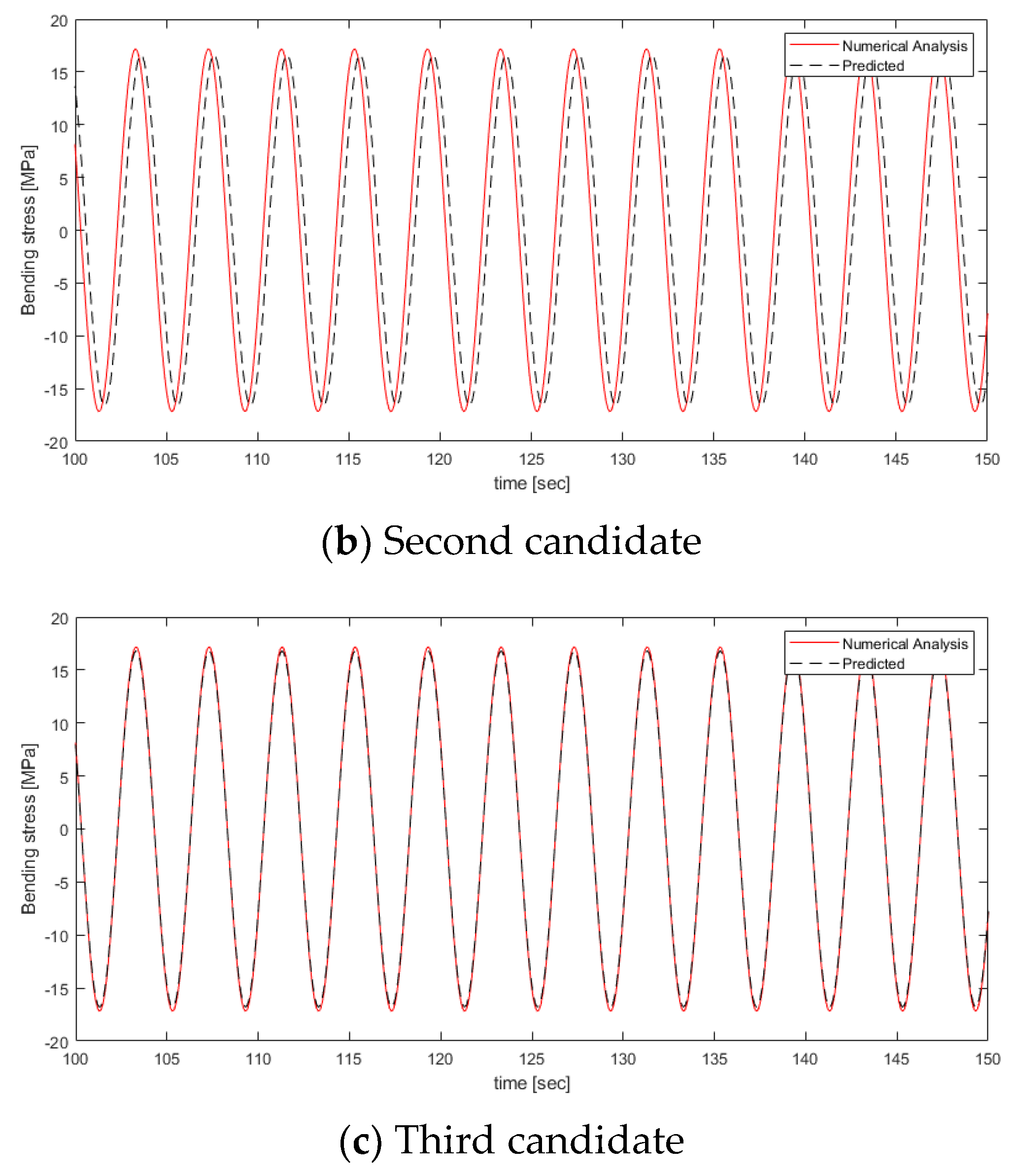
- The DBM-based structural response prediction method was applied to a multi-linked floating offshore structure. Based on the results of the fluid–structure interaction numerical analysis, the conversion matrix was calculated through the principal DBM selection algorithm. The structural response prediction accuracy was evaluated for three candidate groups by varying the sensor positions of the structural members corresponding to the inputs of the conversion matrix, and the evaluation showed that the results of the structural responses were different among the three groups. This indicated that the DBM-based conversion matrix of the multi-linked floating offshore structure was affected by the selection of the sensor positions. The first to fourth modes among the DBMs of the third group and the DBMs of the output sensor are the same. The structural response prediction accuracy was high when the principal DBMs of the structural members at the input positions were similar to the DBMs of the structural members at the output positions.
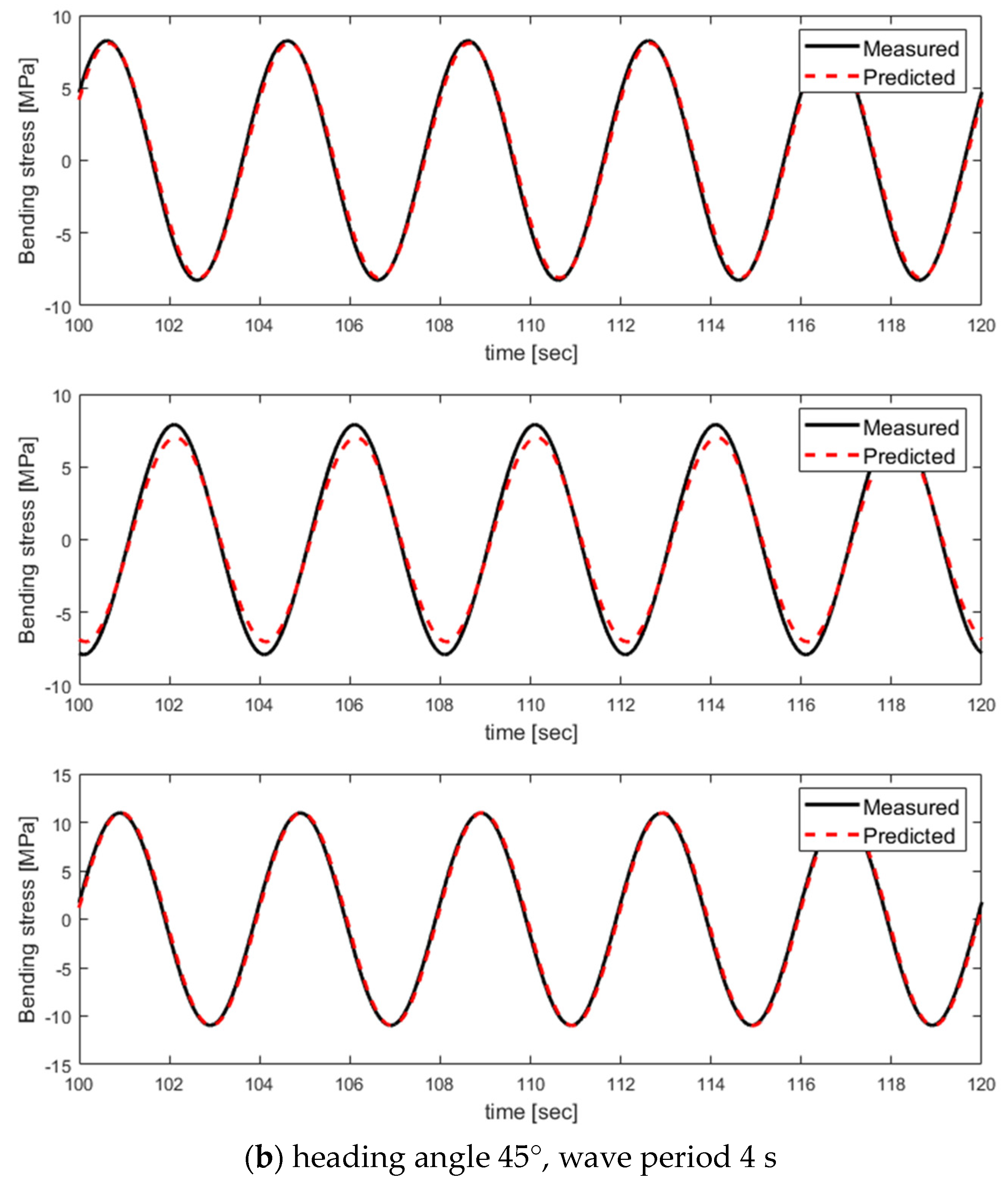
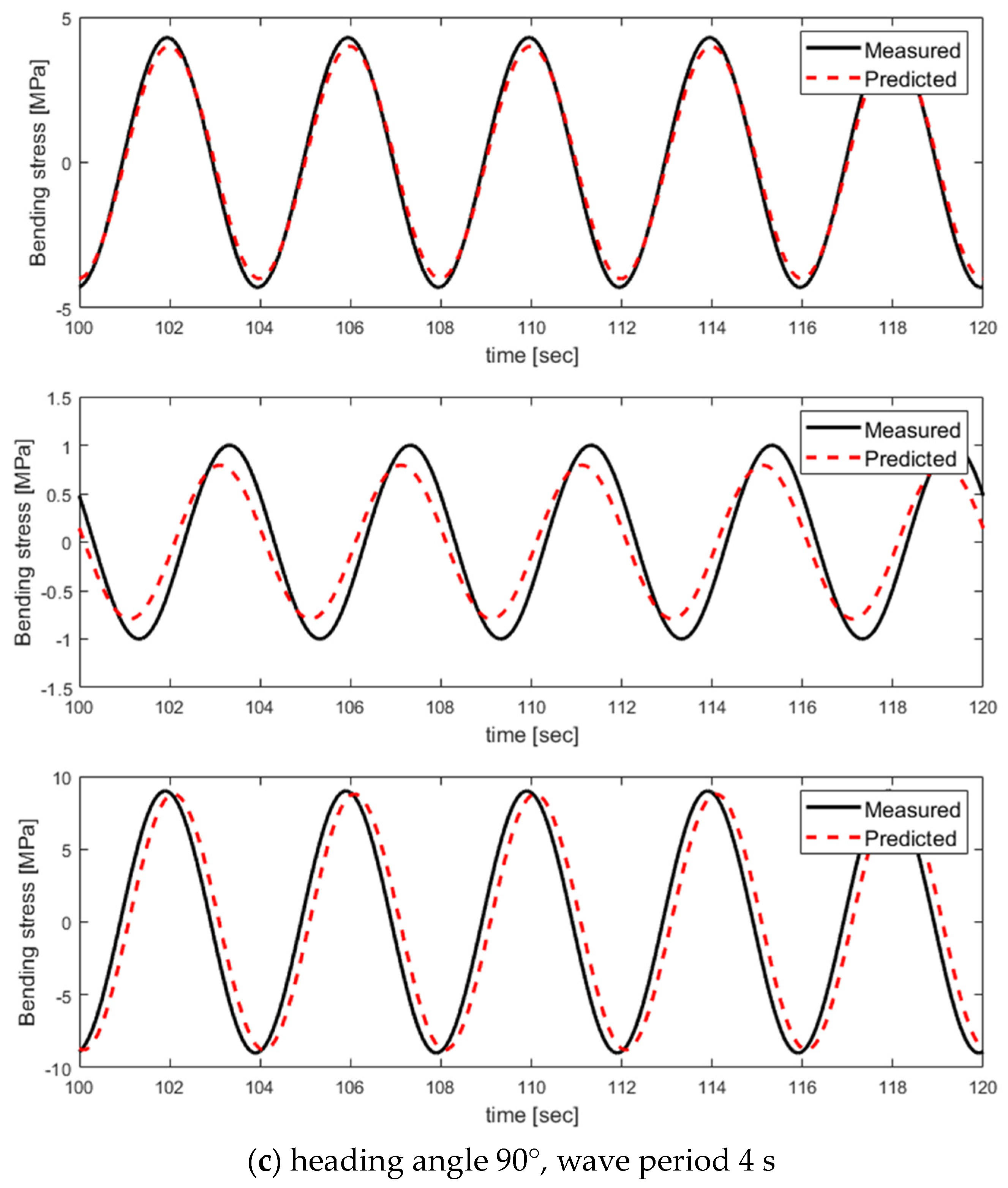
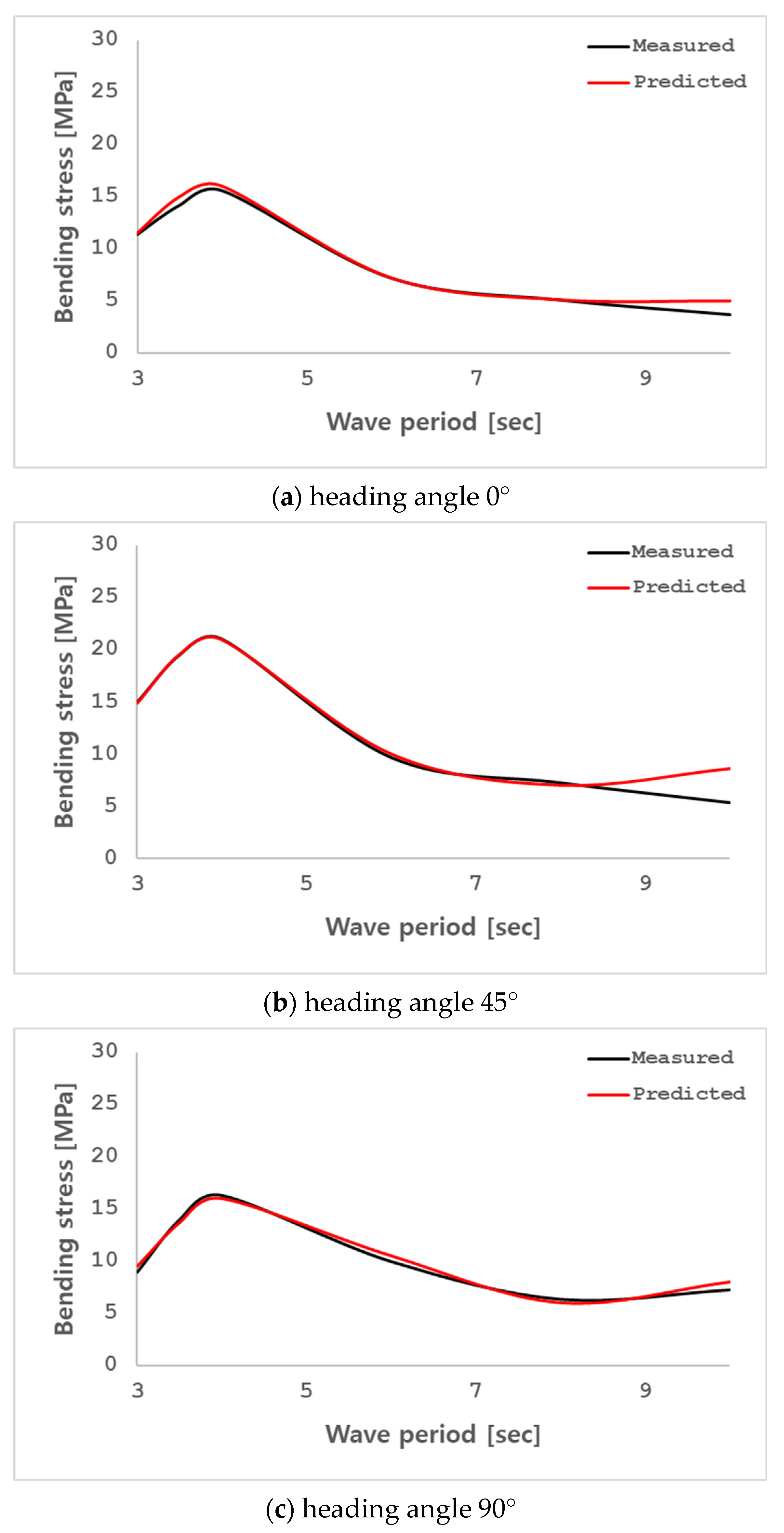
- We analyzed the bending stress prediction results obtained through the conversion matrix based on the results of the numerical analysis and model test. The first candidate group lacked the DBMs for the wave condition with heading angle 45° and exhibited the lowest bending stress prediction accuracy for the wave condition with heading angle 45°. The second and third candidate groups are composed of the DBMs for the wave condition with heading angle 0°, 45°, 90°, but the second candidate group had a phase difference for all the bending stress prediction results and exhibited a lower bending stress prediction accuracy. The third candidate group showed a high bending stress prediction accuracy with an error of about 1%, indicating that the principal DBMs constituting the conversion matrix of the third candidate group reflect the DBMs constituting the bending stress at the output positions. Therefore, to achieve a high prediction accuracy for bending stress under various wave conditions, the principal DBMs for the structural members at the input positions should be composed of regular waves of various directions and periods. In addition, it is important to select DBMs for the output structural responses to determine the sensor positions of the most similar DBMs.
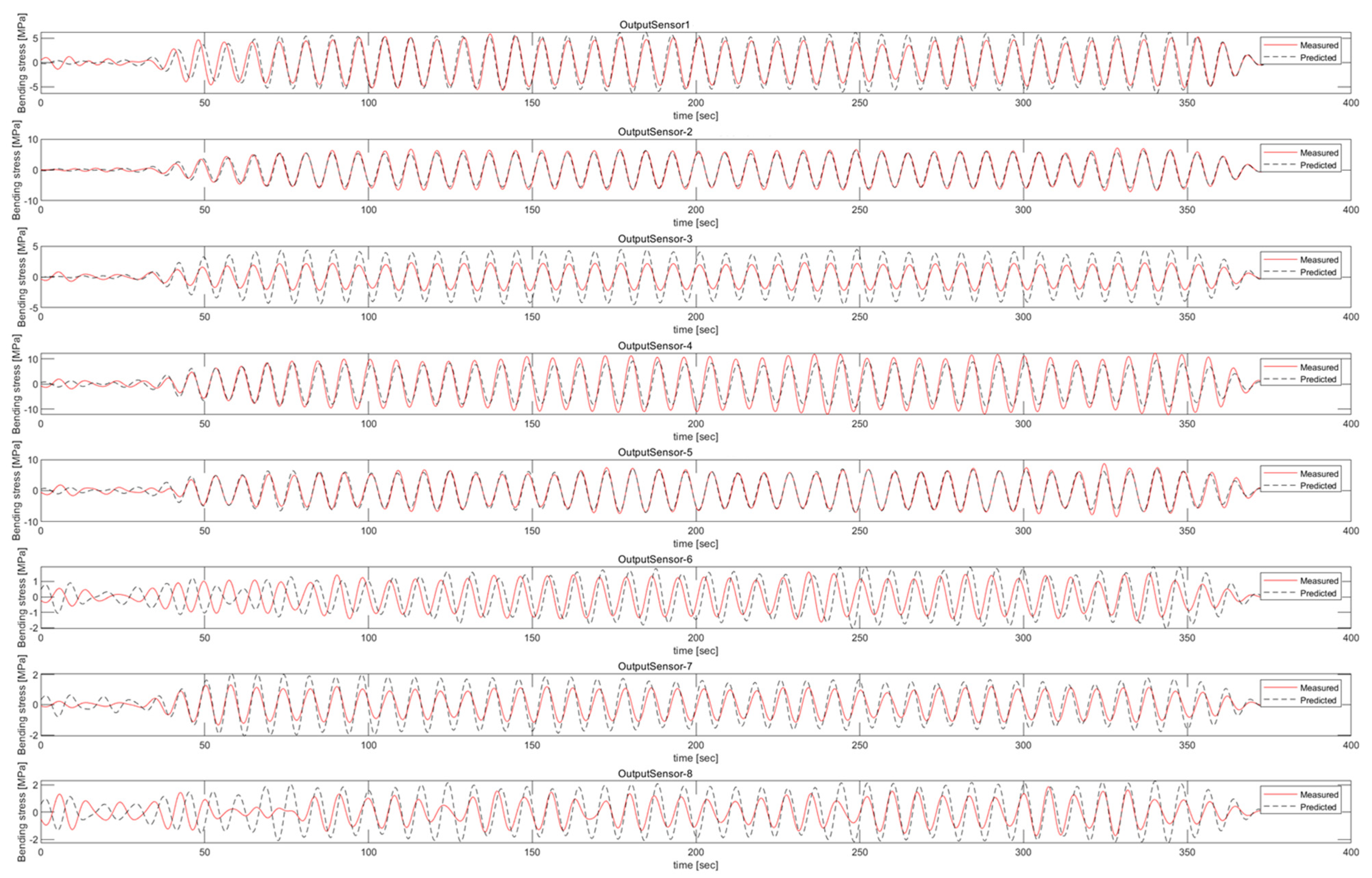
- The prediction error for model test may have been incurred because the principal DBMs of the conversion matrix were prepared based on the results of the numerical analysis. The application of phase difference compensation to the prediction results brought out results that were almost the same as the measurement results. As such, an actual structure may have structural characteristics that are different from its numerical model. Therefore, it is necessary to confirm the similarity of the structural responses of an actual structure in comparison with the results of the numerical analysis. Further studies may need to be conducted to compensate the bending stress prediction method by reflecting the structure characteristics of an actual structure that may be changed from its numerical model [19].
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moore, E.H. On the Reciprocal of the General Algebraic Matrix. Bull. Am. Math. Soc. 1920, 26, 394–395. [Google Scholar]
- Bjerhammar, A. Application of Calculus of Matrices to Method of Least Squares: With Special References to Geodetic Calculations. Trans. Roy. Inst. Technol. Stockh. 1951, 49, 1–86. [Google Scholar]
- Penrose, R. A Generalized Inverse for Matrices. Proc. Camb. Philos. Soc. 1955, 51, 406–413. [Google Scholar] [CrossRef]
- Baudin, E.; Bigot, F.; Derbanne, Q.; Sireta, F.X.; Quinton, E. Increasing ULCS Structural Response Knowledge Through 3DFEM and a Comprehensive Full-Scale Measurement System. In Proceedings of the Twenty-Third International Offshore and Polar Engineering, Anchorage, AK, USA, 30 June–5 July 2013; pp. 56–62. [Google Scholar]
- Bigot, F.; Derbanne, Q.; Baudin, E. A Review of Strains to Internal Loads Conversion Methods in Full Scale Measurements. In Proceedings of the PRADS2013, Changwon, Republic of Korea, 20–25 October 2013; pp. 259–266. [Google Scholar]
- Bigot, F.; Sireta, F.X.; Baudin, E.; Derbanne, Q.; Tiphine, E.; Malenica, S. A Novel Solution to Compute Stress Time Series in Nonlinear Hydro-Structure Simulation. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015; pp. 1–11. [Google Scholar]
- Kefal, A.; Mayang, J.B.; Oterkus, E.; Yildiz, M. Three Dimensional Shape and Stress monitoring of Bulk Carriers based on iFEM Methodology. Ocean Eng. 2017, 147, 256–267. [Google Scholar] [CrossRef]
- Kefal, A.; Tessler, A.; Oterkus, E. An Enhanced Inverse Finite Element Method for Displacement and Stress Monitoring of Multilayered Composite and Sandwich Structures. Compos. Struct. 2017, 179, 514–540. [Google Scholar] [CrossRef]
- Kobayashi, M.; Jumonji, T.; Murayama, H. Three-Dimensional Shape Sensing by Inverse Finite Element Method based on Distributed Fiber-optic Sensors. In Practical Design of Ships and Other Floating Structures: Proceedings of the 14th International Symposium, Yokohama, Japan, 22–26 September 2019; Springer: Berlin/Heidelberg, Germany, 2019; Volume 64, pp. 40–48. [Google Scholar]
- Han, J.S.; Kim, S.H. Automation of Krylov Subspace Model Order Reduction for Transient Response Analysis with Multiple Loading. J. Comput. Struct. Eng. Inst. Korea 2021, 34, 101–111. [Google Scholar] [CrossRef]
- Lai, X.; Yang, L.; He, X.; Pang, Y.; Song, X. Digital Twin-based Structural Health Monitoring by Combining Measurement and Computational data: An Aircraft Wing Example. J. Manuf. Syst. 2023, 69, 76–90. [Google Scholar] [CrossRef]
- Barhoumi, M.; Storhaug, G. Assessment of Whipping and Springing on a Large Container Vessel. Int. J. Nav. Archit. Ocean Eng. 2014, 6, 442–458. [Google Scholar] [CrossRef]
- Ho, Y.; Song, L.; Liu, Z.; Yao, J. Identification of ship hydrodynamic derivatives based on LS-SVM with wavelet threshold denoising. J. Mar. Sci. Eng. 2021, 9, 1356. [Google Scholar]
- Son, H.-Y.; Kim, G.Y.; Kang, H.-J.; Choi, J.C.; Lee, D.-K.; Shin, S.-C. Ship Motion-Based Prediction of Damage Locations Using Bidirectional Long Short-Term Memory. J. Ocean Eng. Technol. 2022, 36, 295–302. [Google Scholar] [CrossRef]
- Vu, H.T.; Park, J.; Yoon, H.K. Estimating Hydrodynamic Coefficients of Real Ships Using AIS Data and Support Vector Regression. J. Ocean Eng. Technol. 2023, 37, 198–204. [Google Scholar] [CrossRef]
- Sim, K.; Lee, K.; Kim, B.W. Structural Response Analysis for Multi-Linked Floating Offshore Structure Based on Fluid-Structure Coupled Analysis. J. Ocean Eng. Technol. 2023, 37, 273–281. [Google Scholar] [CrossRef]
- Kim, B.W.; Hong, S.Y.; Sung, H.G. Comparison of Drift Force Calculation Methods in Time Domain Analysis of Moored Bodies. Ocean Eng. 2016, 126, 81–91. [Google Scholar] [CrossRef]
- Kim, B.W.; Hong, S.Y.; Kyoung, J.H.; Cho, S.K. Evaluation of Bending Moments and Shear Forces at Unit Connections of Very Large Floating Structures Using Hydroelastic and Rigid Body Analyses. Ocean Eng. 2006, 34, 1668–1679. [Google Scholar] [CrossRef]
- Kim, H.S.; Kim, B.W.; Lee, K.; Sung, H.G. Application of Average Sea-state Method for Fast Estimation of Fatigue Damage of Offshore Structure in Waves with Various Distribution Types of Occurrence Probability. Ocean Eng. 2022, 246, 110601. [Google Scholar] [CrossRef]
- Schirmann, M.L.; Chen, T.; Collette, M.D.; Gose, J.W. Linking Seakeeping Performance Predictions with Onboard Measurements for Surface Platform Digital Twins. In Proceedings of the 14th International Symposium on Practical Design of Ships and Other Floating Structures, Yokohama, Japan, 22–26 September 2019. [Google Scholar]
- Tygesen, U.T.; Jepsen, M.S.; Vestermark, J.; Dollerup, N.; Perdersen, A. The True Digital Twin Concept for Fatigue Reassessment of Marine Structures. In Proceedings of the 14th International Symposium on Practical Design of Ships and Other Floating Structures, Yokohama, Japan, 22–26 September 2019. [Google Scholar]
- Kim, C.H. A Study for Digital Transformation Based on Collaboration Master Plan for Shipbuilding & Marine Engineering Industry. J. Ocean Eng. Technol. 2022, 37, 190–197. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Principal Dimension | |
|---|---|
| Dimension [m] | B × L × Draft = 18 × 36 × 1.005 |
| Total Mass [kg] | 30,041 |
| Material | Aluminum |
| Dimension of floating body [m] | B × L × H = 1.8 × 1.8 × 1.72 |
| Center of gravity [m] | 0.634 m |
| Center of buoyancy [m] | −0.503 m |
| Dimension of beam connector | B × L × t1 × t2 = 0.34 × 0.38 × 0.03 × 0.03 |
| Elastic modulus of beam connector [GPa] | 69.60 |
| Spring constant of mooring line [N/m] | 62,336.97 |
| Wave Load Case | |
|---|---|
| Heading angle [°] | 0:15:90 |
| Wave period [s] | 3.0, 3.5, 4.0, 4.5, 5.0, 5.5, 6.0, 6.5, 8.0, 10.0 |
| Measured Item | Sensor | DAQ System | No. Channels | |
|---|---|---|---|---|
| 6 DOF motions | Structure in front | Optical LED | RODYM-6D | 6 |
| Structure behind | Optical LED | RODYM-6D | 6 | |
| Stress on connector beam | Bending stress | 1-axis strain gauge | NI system | 48 |
| Shear stress | 2-axis Rosette gauge | NI system | 4 | |
| Tension on mooring line | Tension | Loadcell | NI system | 4 |
| Irregular wave | IRR-01 | Capacitance probe | NI system | 1 |
| Type | Heading Angle [°] | Wave Height/Significant Wave Height [m] | Wave Period/Modal Period [s] |
|---|---|---|---|
| Regular wave | 0, 45, 90 | 0.351 | 3.00 |
| 0.478 | 3.50 | ||
| 0.624 | 4.00 | ||
| 0.790 | 4.50 | ||
| 0.976 | 5.00 | ||
| 1.000 | 5.50 | ||
| 1.000 | 6.00 | ||
| 1.000 | 8.00 | ||
| 1.000 | 10.00 | ||
| Irregular wave | 0, 45, 90 | 1.000 | 4.00 |
| 1.000 | 6.00 | ||
| 0.800 | 4.00 | ||
| 0.800 | 6.00 |
| DBM | Wave Load Case (Heading Angle/Wave Period) | ||
|---|---|---|---|
| 1st Candidate Groups | 2nd Candidate Groups | 3rd Candidate Groups | |
| 1st mode | 45°/4.5 s | 45°/4.5 s | 45°/4.5 s |
| 2nd mode | 45°/4.0 s | 45°/4.0 s | 0°/5.0 s |
| 3rd mode | 0°/5.5 s | 0°/3.5 s | 45°/5.5 s |
| 4th mode | 90°/3.5 s | 90°/4.0 s | 0°/3.5 s |
| 5th mode | 0°/5.0 s | 0°/6.0 s | 90°/5.5 s |
| DBM of Output Sensors | Wave Load Case (Heading Angle/Wave Period) |
|---|---|
| First mode | 45°/4.5 s |
| Second mode | 45°/5.5 s |
| Third mode | 0°/5.0 s |
| Fourth mode | 0°/3.5 s |
| Fifth mode | 90°/5.0 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sim, K.; Lee, K. A Comparative Study on the Structural Response of Multi-Linked Floating Offshore Structure between Digital Model and Physical Model Test for Digital Twin Implementation. J. Mar. Sci. Eng. 2024, 12, 262. https://doi.org/10.3390/jmse12020262
Sim K, Lee K. A Comparative Study on the Structural Response of Multi-Linked Floating Offshore Structure between Digital Model and Physical Model Test for Digital Twin Implementation. Journal of Marine Science and Engineering. 2024; 12(2):262. https://doi.org/10.3390/jmse12020262
Chicago/Turabian StyleSim, Kichan, and Kangsu Lee. 2024. "A Comparative Study on the Structural Response of Multi-Linked Floating Offshore Structure between Digital Model and Physical Model Test for Digital Twin Implementation" Journal of Marine Science and Engineering 12, no. 2: 262. https://doi.org/10.3390/jmse12020262
APA StyleSim, K., & Lee, K. (2024). A Comparative Study on the Structural Response of Multi-Linked Floating Offshore Structure between Digital Model and Physical Model Test for Digital Twin Implementation. Journal of Marine Science and Engineering, 12(2), 262. https://doi.org/10.3390/jmse12020262