
Dynamic Accident Network Model for Predicting Marine Accidents in Narrow Waterways Under Variable Conditions: A Case Study of the Istanbul Strait






Abstract
1. Introduction
2. Overview of Accident Analysis Models
3. Models Used in the Study
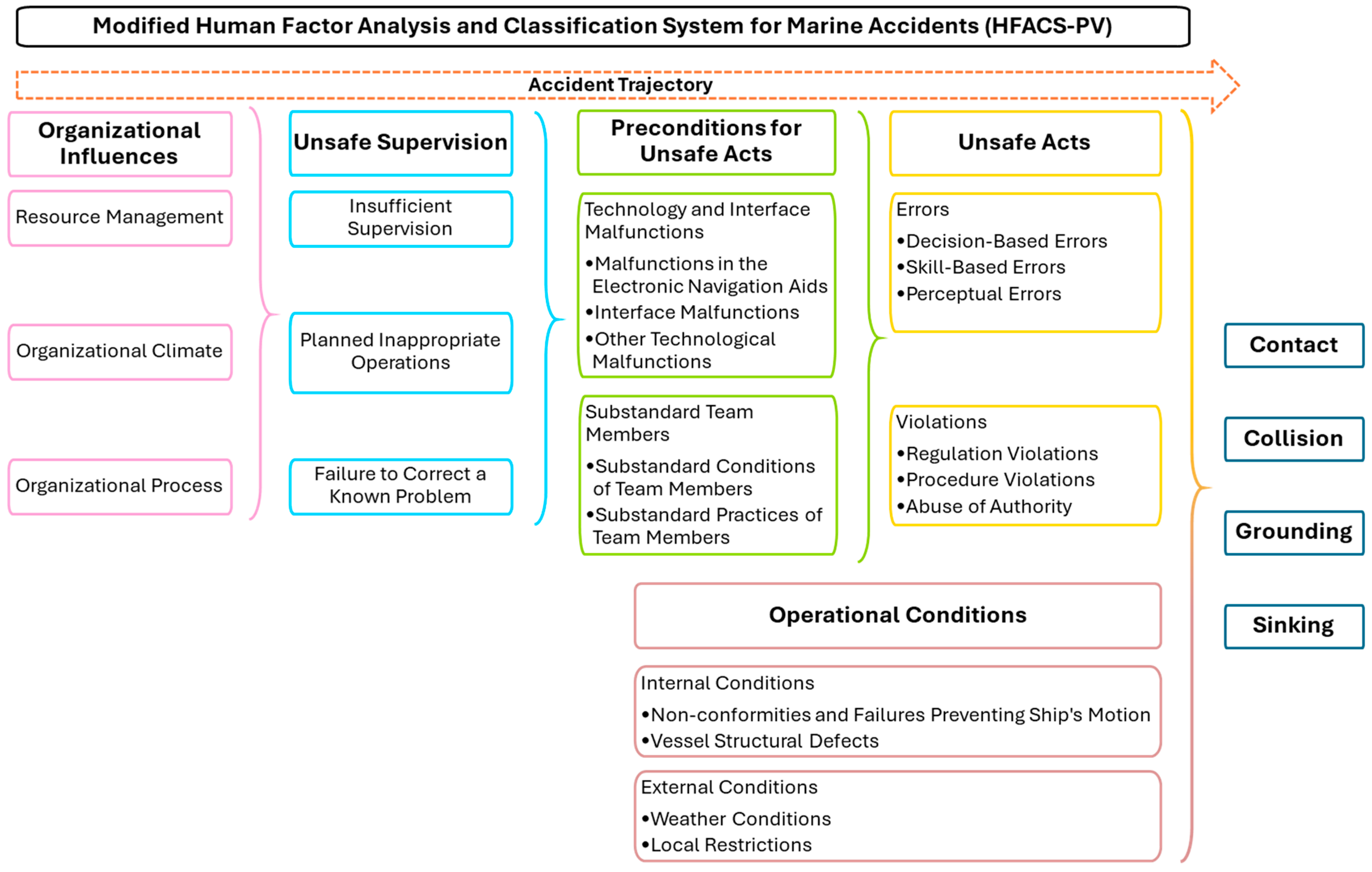
3.1. HFACS-PV Model
3.2. Bayesian Network Approach and Applications in Accident Analysis
4. Materials and Methods
4.1. Identification of Accident-Triggering Factors in the Istanbul Strait and Development of a Dynamic Accident Network
4.2. Establishment of Dynamic Accident Network and Fuzzy Bayesian Implementation
5. Results and Discussion
5.1. Nodes Under the Level of Organizational Influences and Their Relationship to Accidents
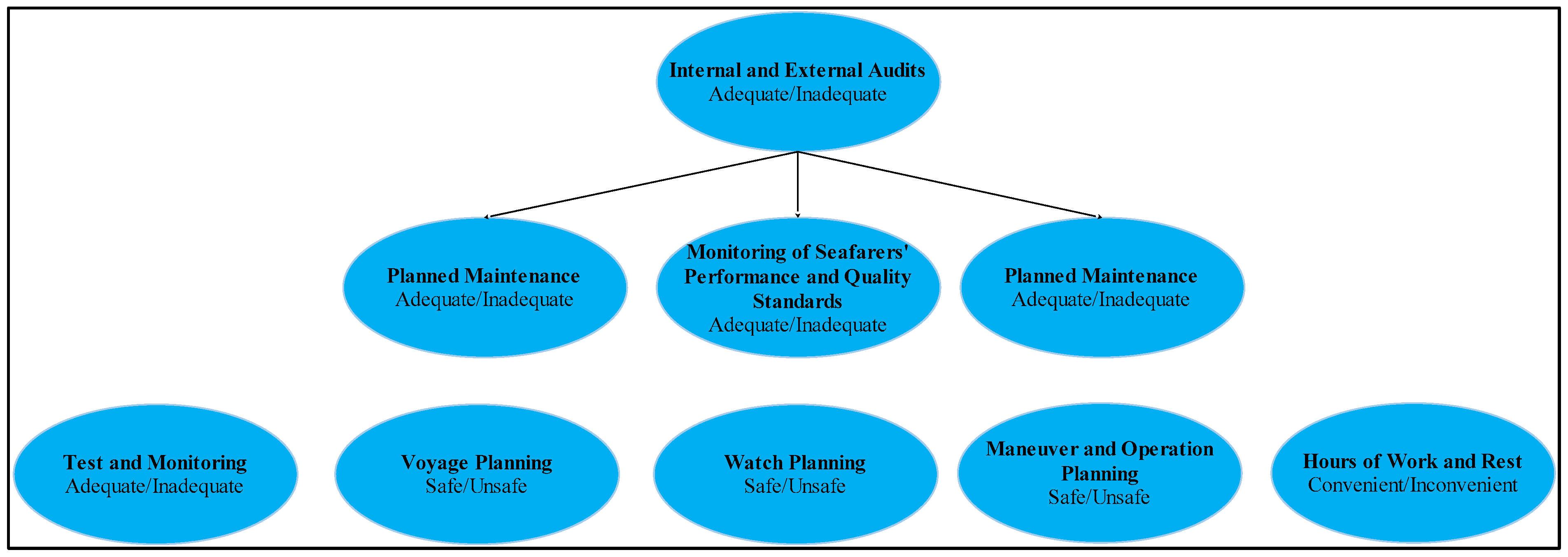
5.2. Nodes Under the Level of Unsafe Supervision and Their Relationship to Accidents
5.3. Nodes Under the Level of Preconditions for Unsafe Acts and Their Relationship to Accidents
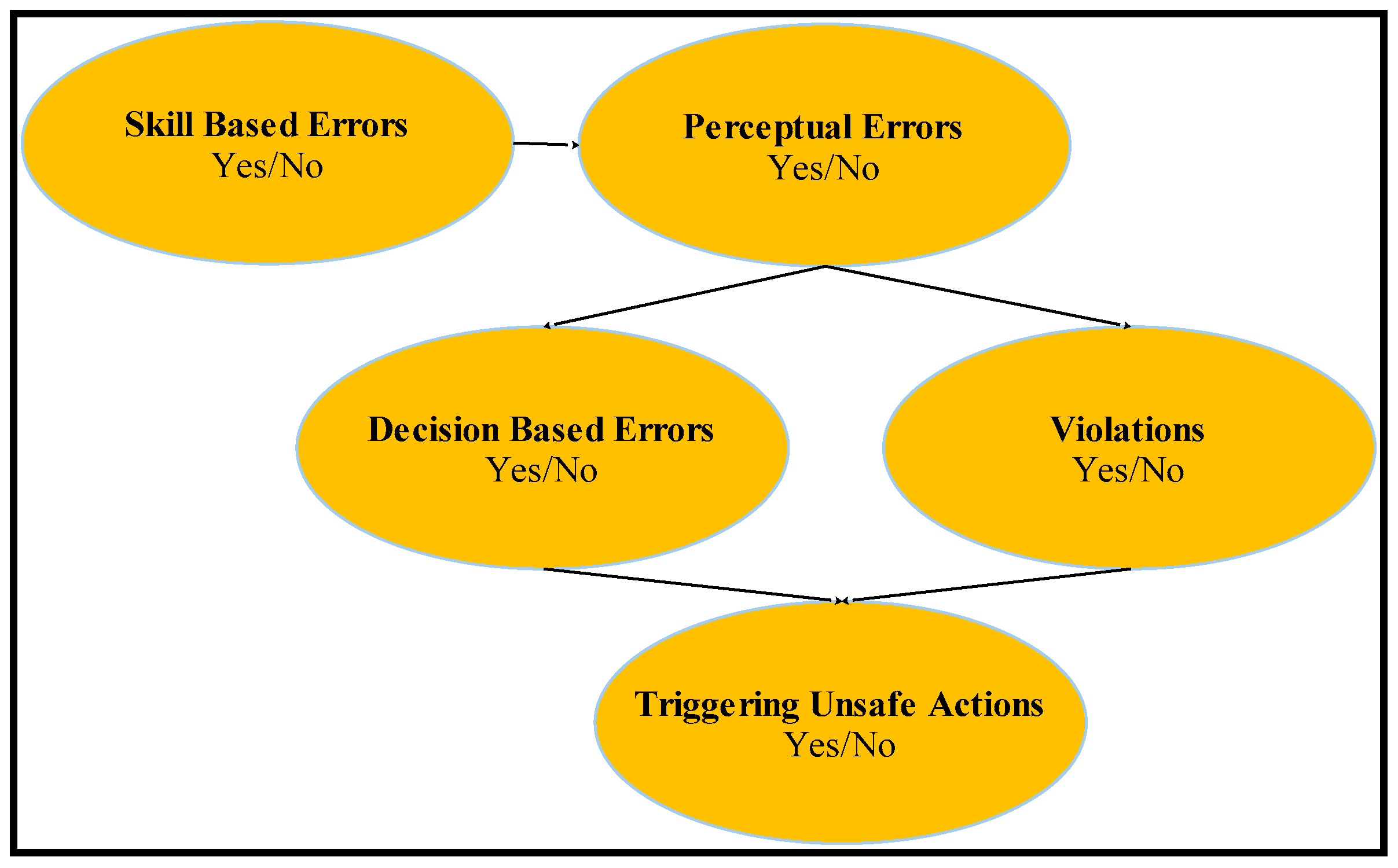
5.4. Nodes Under the Level of Unsafe Acts and Their Relationship to Accidents
5.5. Nodes Under the Level of Operational Conditions and Their Relationship to Accidents
5.6. Accident Types Nodes
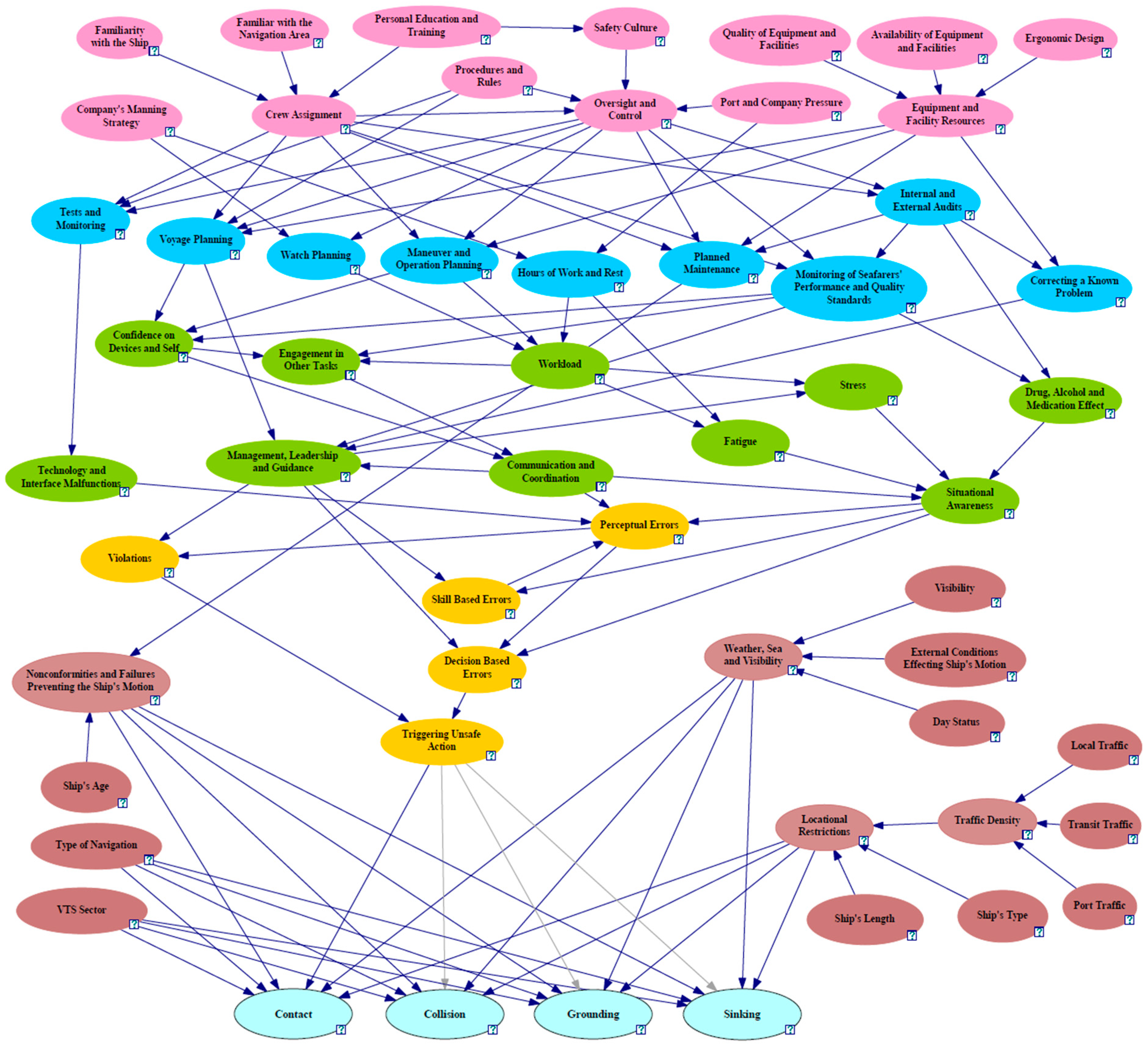
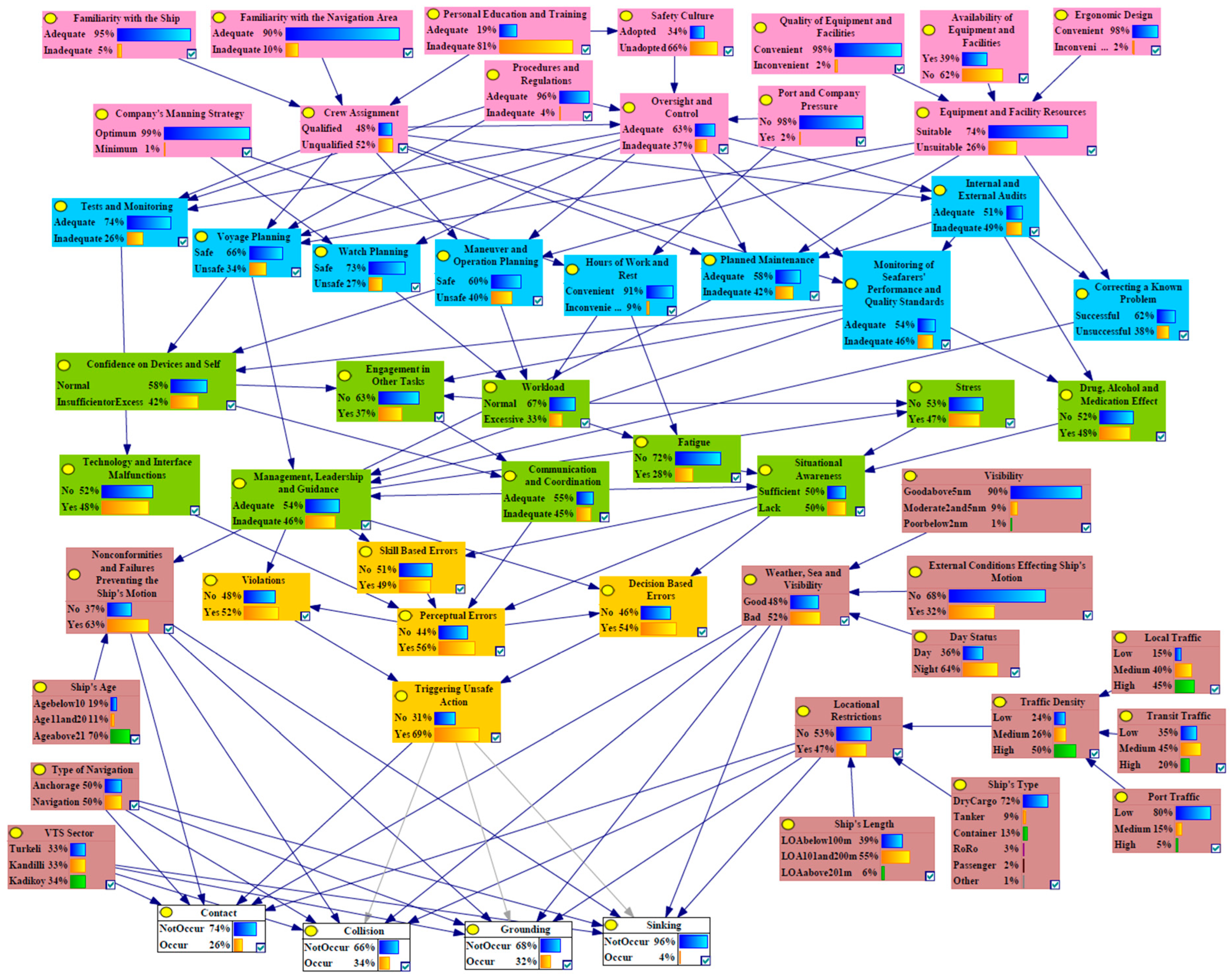
6. Dynamic Network Model Predicting Accidents in Istanbul Strait
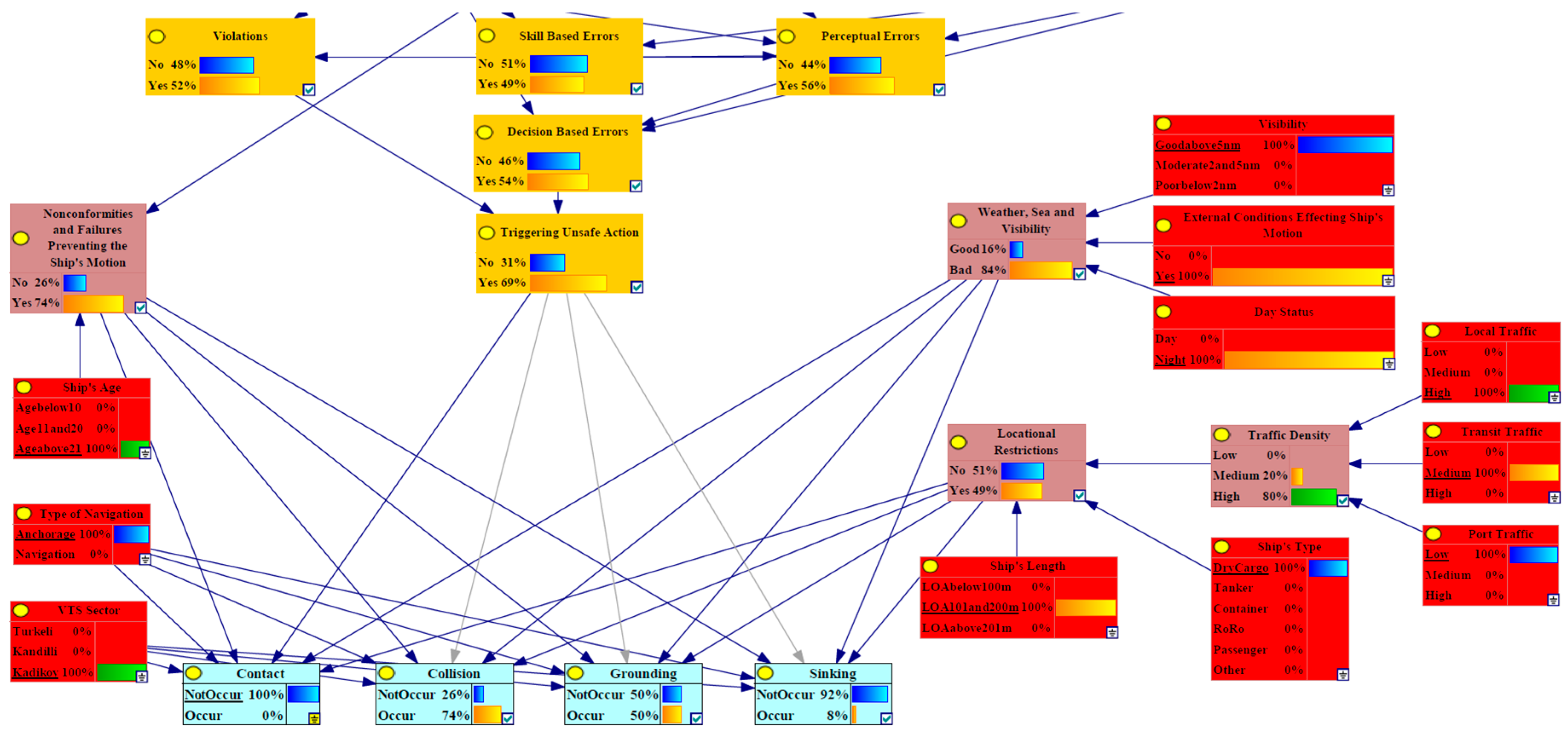
7. Application of Dynamic Accident Network Model on Case Studies
- Ship’s type: Dry cargo
- Ship’s length: 155 m
- Ship’s age: 22 years
- Transit time: 18:30 (night)
- Visibility: 6 miles
- Wind and sea condition: Beaufort scale 4, Douglas scale 3
- Current: Surface current from north to south with a maximum speed of 4 knots
- Local traffic density: High
- Transit traffic: Moderate
- Port traffic: Low
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, W.Z.; Pan, J.; Sanchez, J.C.; Li, X.B.; Xu, M.C. Review on the protective technologies of bridge against vessel collision. Thin-Walled Struct. 2024, 201, 112013. [Google Scholar] [CrossRef]
- Özkanlısoy, Ö.; Akkartal, E. The effect of Suez Canal blockage on supply chains. Dokuz Eylül Üniversitesi Denizcilik Fakültesi Derg. 2022, 14, 51–79. [Google Scholar] [CrossRef]
- EMSA. Annual Overview of Marine Casualties and Incidents 2023; European Maritime Safety Agency: Lisbon, Portugal, 2023; pp. 1–66. [Google Scholar]
- Yildiz, S.; Tonoğlu, F.; Uğurlu, Ö.; Loughney, S.; Wang, J. Spatial and statistical analysis of operational conditions contributing to marine accidents in the Singapore Strait. J. Mar. Sci. Eng. 2022, 10, 2001. [Google Scholar] [CrossRef]
- Yildiz, S.; Uğurlu, Ö.; Loughney, S.; Wang, J.; Tonoğlu, F. Spatial and statistical analysis of operational conditions influencing accident formation in narrow waterways: A Case Study of Istanbul Strait and Dover Strait. Ocean Eng. 2022, 265, 112647. [Google Scholar] [CrossRef]
- Wang, Y.F.; Roohi, S.F.; Hu, X.M.; Xie, M. A new methodology to integrate human factors analysis and classification system with Bayesian Network. In Proceedings of the IEEE International Conference on Industrial Engineering and Engineering Management, IEEM2010, Macao, China, 7–10 December 2010; pp. 1776–1780. [Google Scholar] [CrossRef]
- Heij, C.; Bijwaard, G.E.; Knapp, S. Ship inspection strategies: Effects on maritime safety and environmental protection. Transp. Res. Part D Transp. Environ. 2011, 16, 42–48. [Google Scholar] [CrossRef]
- Deng, J.; Liu, S.; Xie, C.; Liu, K. Risk coupling characteristics of maritime accidents in Chinese inland and coastal waters based on NK model. J. Mar. Sci. Eng. 2021, 10, 4. [Google Scholar] [CrossRef]
- Felski, A.; Zwolak, K. The ocean-going autonomous ship—Challenges and threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- Akhtar, M.J.; Utne, I.B. Human fatigue’s effect on the risk of maritime groundings—A Bayesian Network modeling approach. Saf. Sci. 2014, 62, 427–440. [Google Scholar] [CrossRef]
- Uğurlu, Ö.; Yıldız, S.; Loughney, S.; Wang, J.; Kuntchulia, S.; Sharabidze, I. Analyzing Collision, Grounding, and Sinking Accidents Occurring in the Black Sea Utilizing HFACS and Bayesian Networks. Risk Anal. 2020, 40, 2610–2638. [Google Scholar] [CrossRef] [PubMed]
- Adumene, S.; Afenyo, M.; Salehi, V.; William, P. An adaptive model for human factors assessment in maritime operations. Int. J. Ind. Ergon. 2022, 89, 103293. [Google Scholar] [CrossRef]
- Yildiz, S.; Uğurlu, Ö.; Wang, J.; Loughney, S. Application of the HFACS-PV approach for identification of human and organizational factors (HOFs) influencing marine accidents. Reliab. Eng. Syst. Saf. 2021, 208, 107395. [Google Scholar] [CrossRef]
- Antão, P.; Soares, C.G. Analysis of the influence of human errors on the occurrence of coastal ship accidents in different wave conditions using Bayesian Belief Networks. Accid. Anal. Prev. 2019, 133, 105262. [Google Scholar] [CrossRef] [PubMed]
- Fan, S.; Blanco-Davis, E.; Yang, Z.; Zhang, J.; Yan, X. Incorporation of human factors into maritime accident analysis using a data-driven Bayesian network. Reliab. Eng. Syst. Saf. 2020, 203, 107070. [Google Scholar] [CrossRef]
- Fedi, L.; Faury, O.; Etienne, L.; Cheaitou, A.; Rigot-Muller, P. Application of the IMO taxonomy on casualty investigation: Analysis of 20 years of marine accidents along the North-East Passage. Mar. Policy 2024, 162, 106061. [Google Scholar] [CrossRef]
- Kaptan, M.; Sarıalioğlu, S.; Uğurlu, Ö.; Wang, J. The evolution of the HFACS method used in analysis of marine accidents: A review. Int. J. Ind. Ergon. 2021, 86, 103225. [Google Scholar] [CrossRef]
- Ma, L.; Ma, X.; Wang, T.; Chen, L.; Lan, H. On the development and measurement of human factors complex network for maritime accidents: A case of ship groundings. Ocean Coast. Manag. 2024, 248, 106954. [Google Scholar] [CrossRef]
- Zaib, A.; Yin, J.; Khan, R.U. Determining role of human factors in maritime transportation accidents by fuzzy fault tree analysis (FFTA). J. Mar. Sci. Eng. 2022, 10, 381. [Google Scholar] [CrossRef]
- Sarıalioğlu, S.; Uğurlu, Ö.; Aydın, M.; Vardar, B.; Wang, J. A hybrid model for human-factor analysis of engine-room fires on ships: HFACS-PV&FFTA. Ocean Eng. 2020, 217, 107992. [Google Scholar] [CrossRef]
- Hollnagel, E.; Goteman, O. The functional resonance accident model. In Proceedings of the Cognitive System Engineering in Process Plant, Sendai, Japan, 4–5 November 2004; pp. 155–161. [Google Scholar]
- Underwood, P.; Waterson, P. Accident Analysis Models and Methods: Guidance for Safety Professionals; Loughborough University: Loughborough, UK, 2013; Available online: https://repository.lboro.ac.uk/articles/report/Accident_analysis_models_and_methods_guidance_for_safety_professionals/9354404?file=16964201 (accessed on 8 December 2024).
- Hollnagel, E.; Woods, D.D.; Leveson, N. Resilience Engineering: Concepts and Precepts; Ashgate Publishing, Ltd.: London, UK, 2006. [Google Scholar]
- Feng, Y.; Wang, H.; Xia, G.; Cao, W.; Li, T.; Wang, X.; Liu, Z. A machine learning-based data-driven method for risk analysis of marine accidents. J. Mar. Eng. Technol. 2024, 1–12. [Google Scholar] [CrossRef]
- Reason, J. Human Error; Cambridge University Press: New York, NY, USA, 1990. [Google Scholar]
- Wiegmann, D.A.; Shappell, S.A. Human factors analysis of postaccident data: Applying theoretical taxonomies of human error. Int. J. Aviat. Psychol. 1997, 7, 67–81. [Google Scholar] [CrossRef]
- Wiegmann, D.A.; Shappell, S.A. Human error analysis of commercial aviation accidents: Application of the Human Factors Analysis and Classification system (HFACS). Aviat. Space Environ. Med. 2001, 72, 1006–1016. [Google Scholar] [PubMed]
- Reinach, S.; Viale, A. Application of a human error framework to conduct train accident/incident investigations. Accid. Anal. Prev. 2006, 38, 396–406. [Google Scholar] [CrossRef] [PubMed]
- Tvaryanas, A.P.; Thompson, W.T. Recurrent error pathways in HFACS data: Analysis of 95 mishaps with remotely piloted aircraft. Aviat. Space Environ. Med. 2008, 79, 525–532. [Google Scholar] [CrossRef]
- Chen, S.T.; Wall, A.; Davies, P.; Yang, Z.L.; Wang, J.; Chou, Y.H. A Human and Organisational Factors (HOFs) analysis method for marine casualties using HFACS-Maritime Accidents (HFACS-MA). Saf. Sci. 2013, 60, 105–114. [Google Scholar] [CrossRef]
- Uğurlu, Ö.; Yıldız, S.; Loughney, S.; Wang, J. Modified human factor analysis and classification system for passenger vessel accidents (HFACS-PV). Ocean Eng. 2018, 161, 47–61. [Google Scholar] [CrossRef]
- Aydin, M.; Uğurlu, Ö.; Boran, M. Assessment of human error contribution to maritime pilot transfer operation under HFACS-PV and SLIM approach. Ocean Eng. 2022, 266, 112830. [Google Scholar] [CrossRef]
- Zhan, Q.; Zheng, W.; Zhao, B. A hybrid human and organizational analysis method for railway accidents based on HFACS-Railway Accidents (HFACS-RAs). Saf. Sci. 2017, 91, 232–250. [Google Scholar] [CrossRef]
- Chauvin, C.; Lardjane, S.; Morel, G.; Clostermann, J.P.; Langard, B. Human and organisational factors in maritime accidents: Analysis of collisions at sea using the HFACS. Accid. Anal. Prev. 2013, 59, 26–37. [Google Scholar] [CrossRef]
- Chen, S.T.; Chou, Y.H. Examining Human Factors for Marine Casualties using HFACS—Maritime Accidents (HFACS-MA). In Proceedings of the 2012 12th International Conference on Its Telecommunications (Itst-2012), Taipei, Taiwan, 5–8 November 2012; pp. 385–390. [Google Scholar]
- Bayazit, O.; Kaptan, M. Dynamic risk analysis of allision in port areas using DBN based on HFACS-PV. Ocean Eng. 2024, 298, 117183. [Google Scholar] [CrossRef]
- Maternová, A.; Materna, M.; Dávid, A.; Török, A.; Švábová, L. Human error analysis and fatality prediction in maritime accidents. J. Mar. Sci. Eng. 2023, 11, 2287. [Google Scholar] [CrossRef]
- Uğurlu, F.; Yıldız, S.; Boran, M.; Uğurlu, Ö.; Wang, J. Analysis of fishing vessel accidents with Bayesian network and Chi-square methods. Ocean Eng. 2020, 198, 106956. [Google Scholar] [CrossRef]
- Aydin, M.; Akyuz, E.; Boustras, G. A holistic safety assessment for cargo holds and decks fire & explosion risks under fuzzy Bayesian network approach. Saf. Sci. 2024, 176, 106555. [Google Scholar] [CrossRef]
- Bayes, T. An essay towards solving a problem in the doctrine of chances. Stud. Hist. Stat. Probab. 1970, 1, 134–153. [Google Scholar] [CrossRef]
- Howson, C.; Urbach, P. Scientific Reasoning: The Bayesian Approach; Open Court Publishing: Chicago, IL, USA, 2006. [Google Scholar]
- Trucco, P.; Cagno, E.; Ruggeri, F.; Grande, O. A Bayesian Belief Network modelling of organisational factors in risk analysis: A case study in maritime transportation. Reliab. Eng. Syst. Saf. 2008, 93, 845–856. [Google Scholar] [CrossRef]
- Animah, I. Application of bayesian network in the maritime industry: Comprehensive literature review. Ocean Eng. 2024, 302, 117610. [Google Scholar] [CrossRef]
- Pristrom, S.; Yang, Z.; Wang, J.; Yan, X. A novel flexible model for piracy and robbery assessment of merchant ship operations. Reliab. Eng. Syst. Saf. 2016, 155, 196–211. [Google Scholar] [CrossRef]
- Yazdi, M.; Kabir, S. A fuzzy Bayesian network approach for risk analysis in process industries. Process Saf. Environ. Prot. 2017, 111, 507–519. [Google Scholar] [CrossRef]
- BayesFusion, L. GeNIe Modeler; BayesFusion, LLC: Pittsburgh, PA, USA, 2024. [Google Scholar]
- Meng, X.; Li, H.; Zhang, W.; Zhou, X.Y.; Yang, X. Analyzing risk influencing factors of ship collision accidents: A data-driven Bayesian network model integrating physical knowledge. Ocean Coast. Manag. 2024, 256, 107311. [Google Scholar] [CrossRef]
- Baksh, A.-A.; Abbassi, R.; Garaniya, V.; Khan, F. Marine transportation risk assessment using Bayesian Network: Application to Arctic waters. Ocean Eng. 2018, 159, 422–436. [Google Scholar] [CrossRef]
- Eleye-Datubo, A.; Wall, A.; Saajedi, A.; Wang, J. Enabling a powerful marine and offshore decision-support solution through Bayesian network technique. Risk Anal. 2006, 26, 695–721. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Zhang, R.; Liu, K. A new marine disaster assessment model combining bayesian network with information diffusion. J. Mar. Sci. Eng. 2021, 9, 640. [Google Scholar] [CrossRef]
- Hänninen, M.; Kujala, P. Bayesian network modeling of Port State Control inspection findings and ship accident involvement. Expert Syst. Appl. 2014, 41, 1632–1646. [Google Scholar] [CrossRef]
- John, A.; Yang, Z.; Riahi, R.; Wang, J. A risk assessment approach to improve the resilience of a seaport system using Bayesian networks. Ocean Eng. 2016, 111, 136–147. [Google Scholar] [CrossRef]
- Afenyo, M.; Khan, F.; Veitch, B.; Yang, M. Arctic shipping accident scenario analysis using Bayesian Network approach. Ocean Eng. 2017, 133, 224–230. [Google Scholar] [CrossRef]
- Fan, S.; Zhang, J.; Blanco-Davis, E.; Yang, Z.; Yan, X. Maritime accident prevention strategy formulation from a human factor perspective using Bayesian Networks and TOPSIS. Ocean Eng. 2020, 210, 107544. [Google Scholar] [CrossRef]
- Lin, C.-T.; Wang, M.-J.J. Hybrid fault tree analysis using fuzzy sets. Reliab. Eng. Syst. Saf. 1997, 58, 205–213. [Google Scholar] [CrossRef]
- Wang, W.-J. New similarity measures on fuzzy sets and on elements. Fuzzy Sets Syst. 1997, 85, 305–309. [Google Scholar] [CrossRef]
- Hsu, H.; Chen, C. Fuzzy hierarchical weight analysis model for multicriteria decision problem. J. Chin. Inst. Ind. Eng. 1994, 11, 126–136. [Google Scholar]
- Buckley, J.J. Fuzzy Probability and Statistics; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Kaushik, M.; Kumar, M. An integrated approach of intuitionistic fuzzy fault tree and Bayesian network analysis applicable to risk analysis of ship mooring operations. Ocean Eng. 2023, 269, 113411. [Google Scholar] [CrossRef]
- Gudder, S. Fuzzy probability theory. Demonstr. Math. 1998, 31, 235–254. [Google Scholar] [CrossRef]
- Arun, N.; Mohan, B. Modeling, stability analysis, and computational aspects of some simplest nonlinear fuzzy two-term controllers derived via center of area/gravity defuzzification. ISA Trans. 2017, 70, 16–29. [Google Scholar] [CrossRef]
- Vahidnia, M.H.; Alesheikh, A.A.; Alimohammadi, A. Hospital site selection using fuzzy AHP and its derivatives. J. Environ. Manag. 2009, 90, 3048–3056. [Google Scholar] [CrossRef] [PubMed]
- Zhao, R.; Govind, R. Defuzzification of fuzzy intervals. Fuzzy Sets Syst. 1991, 43, 45–55. [Google Scholar] [CrossRef]
- Shappel, S.A.; Wiegmann, D.A. The Human Factors Analysis and Classification System-HFACS; US Federal Aviation Administration: Des Plaines, IL, USA, 2000; pp. 1–19.
- Schröder-Hinrichs, J.U.; Baldauf, M.; Ghirxi, K.T. Accident investigation reporting deficiencies related to organizational factors in machinery space fires and explosions. Accid. Anal. Prev. 2011, 43, 1187–1196. [Google Scholar] [CrossRef]
- Ceylan, B.O.; Elidolu, G.; Arslanoğlu, Y. A novel approach for the analysis of engineering complex system accidents: The casualty of the M/V Vitaspirit. Ocean Eng. 2023, 276, 114217. [Google Scholar] [CrossRef]
- Tonoğlu, F.; Atalar, F.; Başkan, İ.B.; Yildiz, S.; Uğurlu, Ö.; Wang, J. A new hybrid approach for determining sector-specific risk factors in Turkish Straits: Fuzzy AHP-PRAT technique. Ocean Eng. 2022, 253, 111280. [Google Scholar] [CrossRef]
- Yildiz, S.; Sönmez, V.Z.; Uğurlu, Ö.; Sivri, N.; Loughney, S.; Wang, J. Modelling of possible tanker accident oil spills in the Istanbul Strait in order to demonstrate the dispersion and toxic effects of oil pollution. Environ. Monit. Assess. 2021, 193, 538. [Google Scholar] [CrossRef] [PubMed]
- Aydogdu, Y.V. A comparison of maritime risk perception and accident statistics in the Istanbul Straight. J. Navig. 2014, 67, 129–144. [Google Scholar] [CrossRef]
- Erol, S.; Demir, M.; Çetisli, B.; Eyüboglu, E. Analysis of ship accidents in the Istanbul Strait using neuro-fuzzy and genetically optimised fuzzy classifiers. J. Navig. 2018, 71, 419. [Google Scholar] [CrossRef]
- Aydogdu, Y.V.; Yurtoren, C.; Park, J.-S.; Park, Y.-S. A study on local traffic management to improve marine traffic safety in the Istanbul Strait. J. Navig. 2012, 65, 99–112. [Google Scholar] [CrossRef]
- Demirci, S.E.; Elçiçek, H. Scientific awareness of marine accidents in Europe: A bibliometric and correspondence analysis. Accid. Anal. Prev. 2023, 190, 107166. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Main Principle | Main Objective | Example Methods |
|---|---|---|---|
| Sequential | Specific causes and well-defined connections. | Identification or elimination of causes. |
|
| Epidemiological | Carriers, barriers, and latent conditions. | Reinforcement of defenses and barriers. |
|
| Systemic | Tight couplings and complex interactions. | Monitoring and controlling performance variability. |
|
| Hybrid | Combination of the most robust approaches for analysis. | Accurate accident modeling and consistent forecasting. |
|
| Designation | Weight Factor | Experience in Designation | Weight Factor | Sea Service | Weight Factor | Number of Strait Transits | Weight Factor |
|---|---|---|---|---|---|---|---|
| Pilot | 3 | 7≤ years | 3 | 10≤ years | 3 | 100≤ times | 3 |
| VTS operator | 3 | 4–6 years | 2 | 6–9 years | 2 | 50–99 times | 2 |
| Master mariner | 2 | 0–3 years | 1 | 0–5 years | 1 | 0–49 times | 1 |
| Expert No | Designation | Experience in Designation | Sea Service | Number of Strait Transits | Weight Factor | Aggregated Weight | Weight Score | |||
|---|---|---|---|---|---|---|---|---|---|---|
| IS-E1 | Pilot | 15 | 28 | 1000≤ times | 3 | 3 | 3 | 3 | 12 | 0.20 |
| IS-E2 | VTS operator | 7 | 12 | 100≤ times | 3 | 3 | 3 | 3 | 12 | 0.20 |
| IS-E3 | Pilot | 16 | 20 | 1000≤ times | 3 | 3 | 3 | 3 | 12 | 0.20 |
| IS-E4 | Pilot | 30 | 30 | 1000≤ times | 3 | 3 | 3 | 3 | 12 | 0.20 |
| IS-E5 | VTS operator | 13 | 20 | 100≤ times | 3 | 3 | 3 | 3 | 12 | 0.20 |
| Total | 60 | 1.00 | ||||||||
| Triangular Fuzzy Numbers | ||||
|---|---|---|---|---|
| Evaluation Scale | Abbreviation | A | B | C |
| Very low | VL | 0 | 0.04 | 0.08 |
| Low | L | 0.07 | 0.13 | 0.19 |
| Medium-low | ML | 0.17 | 0.27 | 0.37 |
| Medium | M | 0.35 | 0.5 | 0.65 |
| Medium-high | MH | 0.63 | 0.73 | 0.83 |
| High | H | 0.81 | 0.87 | 0.93 |
| Very high | VH | 0.92 | 0.96 | 1 |
| Tier 1 | Tier 2 | Tier 3 | Nonconformities | Collision | Contact | Grounding | Sinking |
|---|---|---|---|---|---|---|---|
| Organizational Influences | Resource Management | Human | Electronic navigation devices (ECDIS, RADAR, etc.) | 1 | 0 | 3 | 0 |
| Vessel maneuvering characteristics | 0 | 4 | 1 | 0 | |||
| Cargo operations (loading, stability, lashing, etc.) | 0 | 0 | 0 | 3 | |||
| Steering control system | 0 | 1 | 1 | 0 | |||
| Anchoring maneuver | 96 | 15 | 8 | 2 | |||
| Anchor heaving up maneuver | 8 | 1 | 2 | 0 | |||
| Supply at anchorage (Ship-to-Ship) | 1 | 0 | 0 | 0 | |||
| Bridge Resource Management applications (navigation) | 23 | 20 | 23 | 2 | |||
| Bridge Resource Management applications (at anchor) | 74 | 10 | 4 | 1 | |||
| COLREG rules and application | 31 | 3 | 0 | 1 | |||
| Emergency management (emergency actions, etc.) | 3 | 10 | 10 | 1 | |||
| Emergency management (dragging anchor) | 39 | 6 | 4 | 1 | |||
| Bridge team members unfamiliar with navigation area | 0 | 3 | 4 | 0 | |||
| Master unfamiliar with navigation area | 0 | 6 | 10 | 0 | |||
| Minimum safe manning levels | 1 | 0 | 0 | 1 | |||
| Inappropriate crew assignment (incompetency, etc.) | 1 | 0 | 0 | 0 | |||
| Equipment and Facility | Inadequate anchorage area capacity | 114 | 16 | 13 | 4 | ||
| Fixed or floating navigation aids in port | 1 | 0 | 0 | 0 | |||
| Bridge navigation devices (ECDIS, RADAR, etc.) | 0 | 1 | 1 | 2 | |||
| Bridge ergonomic design (blind sectors) | 1 | 0 | 0 | 0 | |||
| Bridge navigation equipment layout (ECDIS, etc.) | 2 | 0 | 1 | 0 | |||
| Organizational Climate | Structure | Lack of communication and coordination | 0 | 0 | 0 | 0 | |
| Deficiencies in command chain | 0 | 0 | 0 | 0 | |||
| Shortcomings in authority distribution | 0 | 0 | 0 | 0 | |||
| Policies | Promotion and advancement | 0 | 0 | 0 | 0 | ||
| Shortcomings in drug and alcohol policy | 0 | 0 | 0 | 0 | |||
| Culture | Weak safety culture among crew members | 1 | 1 | 0 | 0 | ||
| Time pressure imposed by shipping company | 2 | 1 | 1 | 0 | |||
| Management and oversight deficiencies by shipping company | 0 | 0 | 0 | 0 | |||
| Organizational Process | Operation Management | Improper maneuvering management—anchorage | 110 | 17 | 11 | 3 | |
| Improper voyage management—ship | 27 | 17 | 21 | 2 | |||
| Improper maneuvering management—port | 1 | 0 | 1 | 0 | |||
| Legal Shortcomings | Watchkeeping system and schedule | 5 | 0 | 0 | 0 | ||
| Anchor watch | 4 | 0 | 0 | 0 | |||
| Planned maintenance rules | 0 | 0 | 0 | 0 | |||
| Oversight | Pre-voyage risk assessment | 5 | 0 | 0 | 1 | ||
| Risk assessment prior to narrow channel passage | 19 | 18 | 16 | 1 | |||
| Risk assessment prior to anchoring | 92 | 15 | 11 | 2 | |||
| Risk assessment prior to anchor heaving up maneuver | 14 | 1 | 2 | 0 | |||
| Arrival risk assessment (port) | 3 | 3 | 0 | 0 | |||
| Insufficient pre-maneuver navigation equipment checks | 1 | 0 | 0 | 0 | |||
| Neglect of weather forecasts | 0 | 1 | 1 | 5 | |||
| Unsafe Supervision | Insufficient Supervision | Tests and controls—bridge navigation devices | 1 | 4 | 5 | 1 | |
| Tests and controls—main engine control panel | 1 | 4 | 5 | 0 | |||
| Internal audit deficiency—voyage plan | 5 | 1 | 3 | 6 | |||
| Internal audit deficiency—competency of watchkeeping officer | 1 | 0 | 0 | 0 | |||
| Internal audit deficiency—pilot maneuver commands | 1 | 5 | 4 | 0 | |||
| External audit deficiency—company audits | 0 | 1 | 0 | 4 | |||
| Bridge alarm panel | 0 | 0 | 1 | 0 | |||
| Routine maintenance of main engine | 1 | 4 | 5 | 0 | |||
| Planned Inappropriate Operations | Voyage plan | 30 | 18 | 19 | 7 | ||
| Watchkeeping—navigation watch | 28 | 6 | 9 | 2 | |||
| Watchkeeping—restricted visibility | 1 | 0 | 0 | 0 | |||
| Strait passage—without pilot | 1 | 0 | 0 | 0 | |||
| Berthing maneuver | 0 | 2 | 0 | 0 | |||
| Anchoring operation | 94 | 16 | 11 | 2 | |||
| Anchorage area change | 1 | 0 | 0 | 0 | |||
| Heaving up anchorage | 18 | 1 | 2 | 0 | |||
| Failure to Correct a Known Problem | Uncharted shallow area | 0 | 0 | 1 | 0 | ||
| Preconditions for Unsafe Acts | Substandard Team Members | Substandard Conditions of Team Members | Situational awareness deficiency—bridge team members | 28 | 6 | 4 | 1 |
| Situational awareness deficiency—master | 1 | 1 | 8 | 0 | |||
| Overconfidence—bridge team members | 3 | 0 | 3 | 1 | |||
| Overconfidence—master | 0 | 0 | 1 | 0 | |||
| Lack of Attention | 29 | 6 | 10 | 1 | |||
| Physical fatigue | 0 | 0 | 0 | 0 | |||
| Excessive workload | 0 | 0 | 0 | 0 | |||
| Watchkeeping during night shift | 84 | 23 | 23 | 3 | |||
| Substandard Practices of Team Members | Lack of bridge resource management | 107 | 13 | 21 | 3 | ||
| Emergency management failure—engine failure | 1 | 4 | 5 | 0 | |||
| Emergency management failure—emergency steering | 1 | 4 | 5 | 1 | |||
| Ship-to-ship communication failure | 17 | 2 | 0 | 0 | |||
| Ship-to-ship (language barrier issue) | 0 | 0 | 0 | 1 | |||
| Ship-to-port control (communication not established) | 134 | 32 | 35 | 4 | |||
| Ship-to-port control (language barrier issue) | 3 | 0 | 2 | 0 | |||
| Master-pilot coordination | 0 | 0 | 3 | 0 | |||
| Technology and Interface Malfunctions | Malfunctions in Electronic Navigation Aids | Bridge electronic navigation devices (ECDIS, RADAR, etc.) | 0 | 0 | 0 | 0 | |
| Interface Malfunctions | Coordinate system (GPS, ECDIS, etc.) | 0 | 0 | 0 | 0 | ||
| Connection issues among navigation devices | 0 | 0 | 0 | 0 | |||
| Erroneous data (GPS, ECDIS, RADAR, etc.) | 0 | 0 | 0 | 0 | |||
| Unsafe Acts | Errors | Skill Based | Ineffective use of electronic navigation aids | 4 | 0 | 0 | 0 |
| Incorrect loading and stability calculation | 0 | 0 | 0 | 1 | |||
| Insufficient lashing | 0 | 0 | 0 | 2 | |||
| Decision Based | Improper maneuver—master (emergency anchoring) | 1 | 3 | 4 | 0 | ||
| Improper maneuver—master | 23 | 13 | 18 | 2 | |||
| Improper maneuver—officer | 1 | 0 | 0 | 0 | |||
| Improper maneuver—pilot | 1 | 5 | 4 | 0 | |||
| Delayed maneuver—master | 6 | 0 | 0 | 0 | |||
| Inadequate maneuvering (rudder angle, deceleration, etc.) | 12 | 3 | 0 | 1 | |||
| Improper route selection | 0 | 0 | 1 | 0 | |||
| Improper anchoring maneuver (anchor drop) | 50 | 11 | 8 | 1 | |||
| Improper weighing anchor maneuver | 14 | 1 | 1 | 0 | |||
| Navigation in storm conditions | 3 | 0 | 0 | 0 | |||
| Operating beyond vessel design limits | 0 | 1 | 1 | 5 | |||
| Cargo shifting or improper stability | 0 | 0 | 0 | 2 | |||
| Master notifies port control late (drifting) | 0 | 0 | 1 | 0 | |||
| Improper anchor site selection (dragging anchor) | 42 | 5 | 5 | 1 | |||
| Perceptual Based | Failure to detect collision risk | 25 | 1 | 0 | 1 | ||
| Failure to detect grounding risk | 0 | 2 | 14 | 0 | |||
| Delayed detection of water ingress (sinking risk) | 0 | 1 | 0 | 1 | |||
| Misinterpretation of depth data (unawareness shallow area) | 0 | 1 | 0 | 0 | |||
| Auditory lookout—VHF | 3 | 0 | 3 | 0 | |||
| Violations | Regulation | COLREG Rule 2 (Responsibility in Collision Risk) | 8 | 0 | 0 | 0 | |
| COLREG Rule 5 (Lookout) | 44 | 9 | 15 | 2 | |||
| COLREG Rule 6 (Safe Speed) | 0 | 1 | 3 | 0 | |||
| COLREG Rule 8 (Collision Avoidance Maneuver) | 39 | 4 | 1 | 2 | |||
| COLREG Rule 10 (Traffic Separation Scheme) | 23 | 4 | 1 | 1 | |||
| COLREG Rule 15 (Crossing Situations) | 1 | 0 | 0 | 0 | |||
| COLREG Rule 19 (Vessels in Restricted Visibility) | 1 | 0 | 0 | 0 | |||
| COLREG Rule 22 (Visibility of Lights) | 4 | 0 | 0 | 1 | |||
| COLREG Rule 34 (Maneuver and Warning Signals) | 2 | 0 | 0 | 0 | |||
| COLREG Rule 35 (Sound Signals in Restricted Visibility) | 1 | 0 | 0 | 0 | |||
| Anchor watch (STCW) | 63 | 12 | 6 | 2 | |||
| Navigation watch (STCW) | 14 | 8 | 8 | 0 | |||
| Unmanned bridge (STCW) | 4 | 0 | 0 | 1 | |||
| Local legislation (Turkish Straits Traffic Arrangement) | 1 | 0 | 0 | 0 | |||
| Procedure | Company procedures—routine position checks | 136 | 34 | 38 | 4 | ||
| Company procedures—routine mooring line checks | 0 | 1 | 0 | 0 | |||
| Company procedures—safe anchoring (SMS) | 102 | 16 | 12 | 2 | |||
| Company procedures—heaving up anchor in rough sea | 5 | 0 | 1 | 0 | |||
| Company procedures—safe passage in narrow waterways | 23 | 18 | 16 | 6 | |||
| Steering control system—emergency steering | 1 | 5 | 4 | 1 | |||
| Abuse of Authority | Ignoring port control warnings | 0 | 0 | 0 | 0 | ||
| Incorrect/incomplete information—pilot | 0 | 0 | 0 | 0 | |||
| Incorrect/incomplete information—port control | 0 | 0 | 1 | 1 | |||
| Alarm deactivation—ECDIS, Echo Sounder | 0 | 0 | 2 | 0 | |||
| Volume reduction—VHF Radio | 3 | 0 | 2 | 0 | |||
| Operational Conditions | External Conditions | Weather Conditions | Nighttime | 95 | 24 | 28 | 5 |
| Sun reflection (sea surface) | 0 | 0 | 0 | 0 | |||
| Strong currents | 7 | 4 | 7 | 0 | |||
| Rough sea conditions | 33 | 5 | 9 | 6 | |||
| Strong winds | 4 | 1 | 1 | 0 | |||
| Local Restrictions | Port | 3 | 5 | 0 | 0 | ||
| Coastal waters | 0 | 0 | 0 | 1 | |||
| Anchorage area (crowded) | 114 | 17 | 16 | 4 | |||
| Narrow waterway/channel | 27 | 21 | 26 | 5 | |||
| Heavy traffic | 15 | 12 | 11 | 1 | |||
| Shallow area | 0 | 4 | 42 | 1 | |||
| Sharp turn | 3 | 10 | 9 | 1 | |||
| Restricted maneuvering space | 17 | 16 | 14 | 1 | |||
| Internal Conditions | Nonconformities and Failures | Engine malfunction | 1 | 4 | 5 | 0 | |
| Steering malfunction | 1 | 4 | 5 | 1 | |||
| Power loss | 2 | 2 | 2 | 0 | |||
| Rope cutting | 0 | 1 | 0 | 0 | |||
| Vessel Structure | Inland vessel (river type) | 0 | 0 | 1 | 9 | ||
| Old vessel (age ≥ 20) | 117 | 31 | 27 | 8 | |||
| Worn hull structure | 0 | 1 | 0 | 2 | |||
| Operational Conditions | Expert Opinions (N = 19) | ||
|---|---|---|---|
| Effect | No Opinion | Not Effect | |
| Ship’s age | 17 | 0 | 2 |
| Ship’s length | 16 | 0 | 3 |
| Ship’s type | 15 | 1 | 3 |
| Status of the day | 17 | 0 | 2 |
| Ship’s speed | 19 | 0 | 0 |
| Ship’s draught | 14 | 2 | 3 |
| Wind direction | 19 | 0 | 0 |
| Wind speed | 19 | 0 | 0 |
| Current’s set | 19 | 0 | 0 |
| Current’s drift | 19 | 0 | 0 |
| Master’s number of passage transits | 10 | 0 | 9 |
| Narrowest part of the channel | 7 | 3 | 9 |
| Sharpest turn along the channel | 10 | 2 | 7 |
| Local traffic | 19 | 0 | 0 |
| Existence of shore lights | 16 | 0 | 3 |
| Anchorage area capacity | 6 | 5 | 8 |
| Node (Abbreviation) | Nonconformities Under the Node | Negative State | Parent |
|---|---|---|---|
| Familiarity with the Ship (FS) | Electronic navigation devices (ECDIS, Radar, GPS, Autopilot, Gyroscope, etc.), Ship’s maneuvering characteristics, Steering control system, Cargo operations, Propeller type, Engine personnel’s familiarity with engine room equipment | Inadequate | No |
| Familiarity with the Navigation Area (FNA) | Master, bridge team members and pilot unfamiliar with navigation area | Inadequate | No |
| Personal Education and Training (PET) | Anchoring maneuvers, Bridge resource management practices (At anchor, Underway), Emergency management (Anchor dragging, Emergency actions, steering lock, engine failure, power loss, etc.), COLREGs and their implementation, Mooring maneuvers, Resupplying at anchor (Ship-to-Ship) | Inadequate | No |
| Safety Culture (SC) | Weak safety culture among ship personnel/Company, Inadequate environment for effective use of bridge navigation equipment, Irregular watchkeeping system | Unadopted | PET |
| Quality of Equipment and Facilities (QEF) | Fixed or floating navigational aids in port, Bridge navigation devices (ECDIS, Radar, Depth sounder, Steering control system, etc.), Visual and auditory systems (Screens and sound devices), Maneuvering equipment (Backup rope, etc.) | Inadequate | No |
| Availability of Equipment and Facilities (AEF) | Anchorage area capacity (insufficient), Pilotage Service, Bridge publications (charts, books, etc.), Bridge navigation equipment (ECDIS, Radar, AIS, Depth sounder, etc.), Vessel Traffic Services equipment, Fixed or floating navigational aids in port | No | No |
| Ergonomic Design (ED) | Layout of bridge navigation equipment (ECDIS, Radar, AIS, Depth sounder, etc.), Bridge Ergonomic Design (Blind sectors, Overall, sound insulation, etc.) | Inadequate | No |
| Company’s Manning Strategy (CMS) | Company’s minimum manning policy, Suboptimal manning relative to ship and voyage intensity | Minimum | No |
| Crew Assignment (PA) | Minimum safe manning levels, Inappropriate personnel assignment | Unqualified | FS, FNA, PET |
| Procedures and Regulations (PR) | Watchkeeping system, Logging of anchor watches, Shift handovers, User manuals (Bridge maneuvering console), Navigation safety (restricted waters, cell phone use, etc.), Bridge introduction and familiarity procedures (For new joiners), Action instructions for emergencies, Voyage planning instructions, Fatigue management, User manuals (Navigation devices on the bridge), Maneuvering instructions, Risk assessment procedures, Standardization (Master’s night/day orders, operational doctrines, etc.), Certification, Flag State’s manning standards, Rules related to planned maintenance | Inadequate | No |
| Oversight and Control (OC) | Risk assessment before anchoring, Risk assessment before navigating narrow channels, Risk assessment before mooring maneuvers, Risk assessment before voyage, Risk assessment upon arrival (Port), Inadequate checking of navigation equipment before maneuvers, Risk assessment upon departure (Port), Ignoring weather forecasts, Ignoring navigation safety bulletins | Inadequate | SC, PR, CA, PCP |
| Port and Company Pressure (PCP) | Company’s time pressure on the fleet, Port’s departure pressure on ships | Yes | No |
| Equipment and Facility Resources (EFR) | Inadequacies related to the availability, quality, and design of equipment and facilities on board or in port | Unsuitable | QEF, AEF, ED |
| Node (Abbreviation) | Nonconformities Under the Node | Negative State | Parent |
|---|---|---|---|
| Voyage Planning (VP) | Inadequate voyage planning, lack of plan, inappropriate strait passage without pilot assistance | Unsafe | CA, PR, OC |
| Watch Planning (WP) | Lookout—Navigation watch/restricted visibility, inappropriate assignment of bridge team members according to type of navigation | Unsafe | CMS, OC |
| Hours of Work and Rest (HWR) | Noncompliant working and rest hours | Inconvenient | CMS, PCP |
| Maneuver and Operation Planning (MOP) | Anchorage operations, departure from anchor, berthing maneuvers, refueling at anchor, inadequate pilot, tug, or VTS support, maneuver without tug, departure maneuver, ballast operations, towing operations | Unsafe | EFR, CA, OC |
| Planned Maintenance (PM) | Main engine, main engine control panel, bridge navigation devices (ECDIS, radar, depth gauge, steering control system, etc.) | Inadequate | OC, CA, EFR, IEA |
| Monitoring of Seafarers’ Performance and Quality Standards (MSPQ) | Lack of monitoring of the competency of navigation officers on watch, lack of monitoring of competency of bridge team members on watch | Inadequate | CA, OC, IEA |
| Tests and Monitoring (TM) | Bridge navigation devices (ECDIS, radar, depth gauge, steering control system, etc.), main engine control panel, bridge alarm panel, engine alarm panel | Inadequate | CA, PR, OC |
| Correcting a Known Problem (CKP) | Uncharted shoals, unmarked buoy system changes on charts, unlit beacons/buoys in navigation area, incorrect harbor depth markers, incorrect troubleshooting of failures | Unsuccessful | EFR, IEA |
| Internal and External Audits (IEA) | Lack of internal audits—voyage planning, lack of external audits—company audits, lack of external audits—port/flag state inspections, etc. | Inadequate | CA, OC |
| Node (Abbreviation) | Nonconformities Under the Node | Negative State | Parent |
|---|---|---|---|
| Confidence on Devices and Self (CDS) | Overconfidence—Bridge team members, Master, Navigation officer; Lack of self-confidence—Master, Navigation officer; Overconfidence in electronic navigation equipment | Insufficient/Excessive | VP, MSPQ, MOP |
| Situational Awareness (SA) | Lack of attention; Lack of situational awareness—Bridge team members; Lack of situational awareness—Engine room team members; Lack of situational awareness—VTS operator; Lookout on night watch | Lack | F, S, DAME, CC |
| Fatigue (F) | Physical fatigue—Master, Navigation officer, Pilot; Sleep deprivation—Bridge team members | Present | WL, ÇDS |
| Stress (S) | Working under stress | Present | WL, MLG |
| Engagement in Other Tasks (EOT) | Navigation officer engaged with mobile phone, laptop, etc. | Present | WL, CKG, MSPQ |
| Workload (WL) | Excessive workload—Master, Navigation officer, Pilot; Excessive workload—VTS operator | Excessive | VP, MOP, HWR, WL |
| Drug, Alcohol, and Medication Effect (DAME) | Vessel operated under the influence of drugs/medication—Master, Navigation officer; Vessel operated under alcohol influence—Master, Navigation officer; Medical illness | Present | MSPQ, IEA |
| Management, Leadership, and Guidance (MLG) | Lack of bridge resource management; Failure in emergency management—Main engine/rudder failure, Power loss; Lack of Master’s authority; Misguidance—Vessel Traffic Services; Misguidance—Pilot/Master’s management inadequacy; Inadequate pre-voyage briefing | Insufficient | VP, CC, MSPQ, CKP |
| Communication and Coordination (CC) | Ship—VTS; Master—Pilot; Ship—Ship; Bridge—Engine room; Among bridge team members; Master—Navigation officer; Navigation officer—Lookout; Pilot—Tugboat | Absent | CDS, EOT |
| Technology and Interface Malfunctions (TIM) | Bridge electronic navigation devices (ECDIS, Radar, AIS, etc.); VHF radio; Navtex; Coordinate system (GPS, ECDIS, etc.); Inter-device connectivity issues (GPS, ECDIS, Radar, etc.); Erroneous data (GPS, ECDIS, Radar, etc.) | Present | TM |
| Node (Abbreviation) | Nonconformities Under the Node | Negative State | Parent |
|---|---|---|---|
| Skill Based Errors (SBE) | Inability of bridge team members to effectively use electronic navigation aids (GPS, ECDIS, Radar, AIS, etc.); Inadequate lashing; Incorrect loading and stability calculations; Inability to effectively use the engine control panel (Master); Failure to follow course; Inability of bridge team members to effectively use maneuvering consoles (main engine, bow thruster, propeller, rudder control system, etc.); Inability to use synchronized mode for propellers (Master); Ineffective use of rudder modes (tracked, untracked) (Watch Officer); Incorrect tide calculation by bridge team members; Incorrect use of ballast system | Present | SA, MLG |
| Perceptual Errors (PE) | Failure to detect risk of collision; Auditory lookout—VHF; Failure to detect risk of grounding; Late detection of water ingress in vessel (sinking risk); Misinterpretation of depth data (unawareness of shallow areas); Inability to understand intentions of target vessel; Inability to assess effects of wind and current; Misinterpretation of navigation data (ECDIS, AIS, GPS, Radar, etc.); Failure to notice or delayed detection of issues (ECDIS, AIS, GPS, Radar, etc.); Position (ECDIS, AIS, GPS, Radar, etc.); Distance measurement—inter-vessel distance; Course and rudder angle—rudder control system; Navigation warnings—Navtex | Present | TIM, CC, SA, SBE |
| Decision Based Errors (DBE) | Inappropriate anchoring maneuver (dropping anchor); Selection of unsuitable anchorage area (dragging); Incorrect maneuver—Master, Pilot, Officer; Improper anchor retrieval maneuver (weighing anchor); Insufficient maneuvering (rudder angle, speed reduction, speed increase, etc.); Delayed maneuver—Master, Pilot, Officer; Operating the vessel beyond design limits; Inappropriate course selection; Cargo shift or improper stability; Delayed maneuver—Pilot; Deviating from planned route; Departure from port in adverse weather and sea conditions; Ignoring pilot recommendations by Master | Present | MLG, SA, PE |
| Violations (V) | COLREG Rules; Navigation and anchor watch (STCW); Local regulations (passage regulations and codes); Watch handover (STCW); Working and rest hours (ILO); Company procedures—Routine checks on vessel position; Company procedures—Safe anchorage (SMS); Company procedures—Safe passage through narrow waterways (SMS); Company procedures—Anchor retrieval in heavy sea conditions; Company policy—Alcohol; Master’s standing orders; Unused devices (ECDIS, AIS, Radar, BNWAS, Depth sounder, etc.); Volume reduction—VHF radio; Incorrect/missing information—VTS, Pilot; Alarm deactivation—ECDIS, Depth sounder, Radar, Rudder control; Ignoring VTS warning; Deviation from safe route for demonstration purposes | Present | MLG, PE |
| Triggering Unsafe Act (TUA) | Decision errors, perceptual errors, skill errors, and violations committed by individuals | Present | DBE, V |
| Node (Abbreviation) | Nonconformities Under the Node | Negative State | Parent |
|---|---|---|---|
| Nonconformities and Failures Preventing Ship’s Motion (NFPSM) | Power loss, Engine failure, Rudder failure, Rope cutting, Controllable pitch propeller failure, Bow-Stern thruster failure | Yes | ShA, PM |
| Ship’s Age (ShA) | Aged ship (age ≥ 21), Worn hull structure | - | No |
| Visibility (Vsb) | Conditions affecting visibility such as night, fog, rain, sun glare (sea surface) | Poor | No |
| External Conditions Effecting Ship’s Motion (ECESM) | Severe sea conditions, Strong current, High wind, Icing, Tides (Current) | Yes | No |
| Day Status (DS) | Negative conditions due to shore lighting and other vessel lights at night | Night | No |
| Weather, Sea, and Visibility (WSV) | Negative conditions due to weather and sea conditions | Bad | Vsb, ECESM, DS |
| Locational Restrictions (LR) | Conditions depending on the navigation type and the VTS Sector | Present | TD, ST, SL |
| Type of Navigation (TN) | Anchorage area (crowded), Narrow waterway channel, Port, Coastal waters, Open sea | - | No |
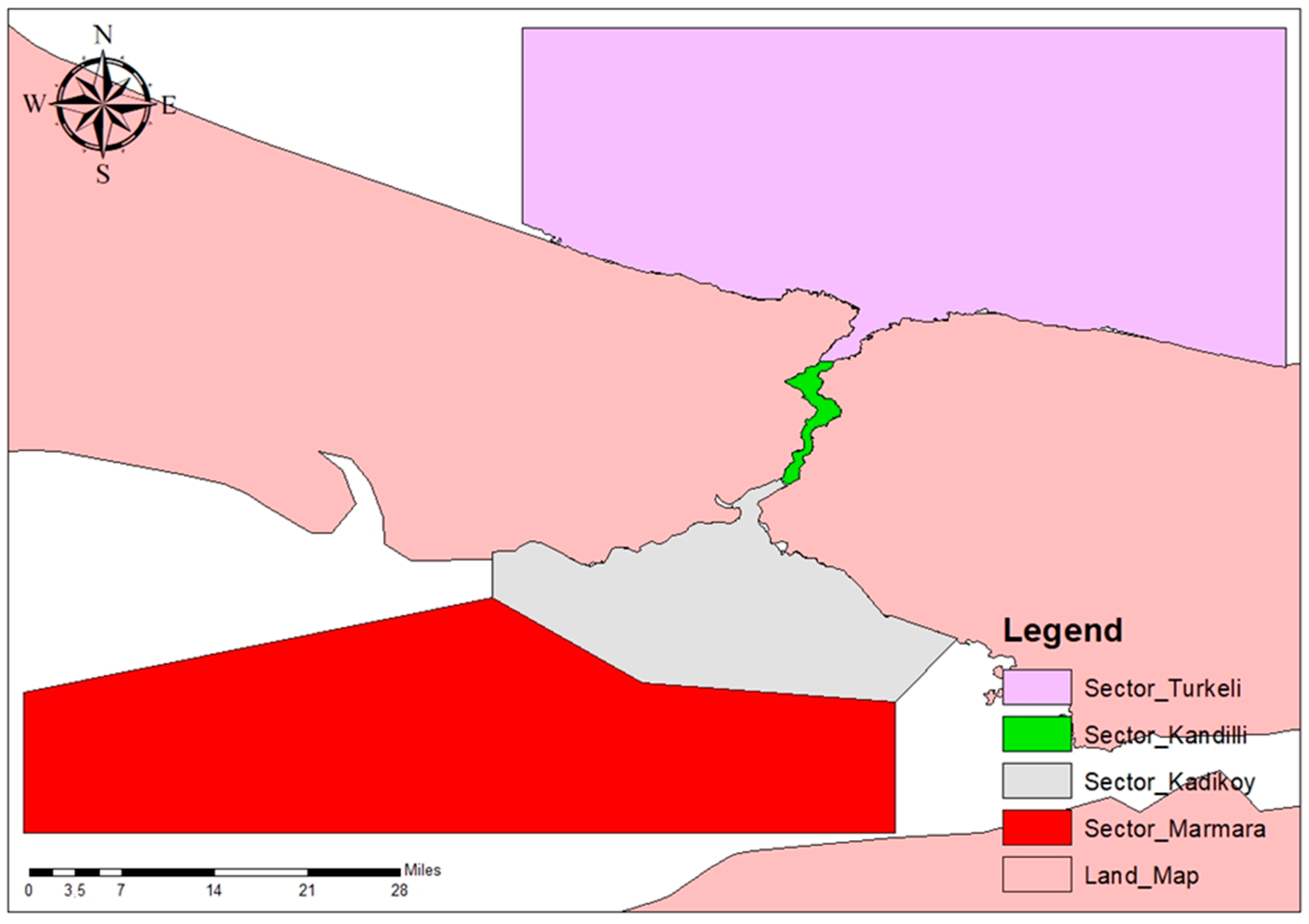
| VTS Sector (VTSS) | Negative conditions within the VTS Sector due to restricted maneuvering areas, heavy traffic, sharp turns, and shallow areas | - | No |
| Ship’s Type (ST) | Dry cargo, Tanker, Container, RoRo, Passenger, Other, Inland ship (river type ship) | - | No |
| Ship’s Length (SL) | Negative conditions due to long and wide ship and narrow channel width | - | No |
| Traffic Density (TD) | High general traffic density due to local traffic, transit traffic, and port traffic | High | LT, TT, PT |
| Local Traffic (LT) | High local traffic density in the area | High | No |
| Transit Traffic (TT) | High transit traffic density in the area | High | No |
| Port Traffic (PT) | High port traffic density in the area | High | No |
| Node (Abbreviation) | Nonconformities Under the Node | Negative State | Parent |
|---|---|---|---|
| Contact (Cnt) | Contact accident | Occurred | TUA, VTSS, TN, NFPSM, LR, WSV |
| Collision (Cll) | Collision accident | Occurred | TUA, VTSS, TN, NFPSM, LR, WSV |
| Grounding (Grd) | Grounding accident | Occurred | TUA, VTSS, TN, NFPSM, LR, WSV |
| Sinking (Snk) | Sinking accident | Occurred | TUA, VTSS, TN, NFPSM, LR, WSV |
| Accident Probabilities (%)/Change in Probabilities (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Sector Name | Navigation Status | Collision | Contact | Grounding | Sinking | ||||
| Original | Change | Original | Change | Original | Change | Original | Change | ||
| Initial Network Kadıköy | Anchorage | 0 | - | 58 | - | 38 | - | 5 | - |
| Transit passage | 47 | - | 54 | - | 47 | - | 4 | - | |
| Case Study Sector Kadıköy | Anchorage | 0 | 74 | +16 | 50 | +12 | 8 | +3 | |
| Transit passage | 56 | +9 | 62 | +8 | 61 | +14 | 7 | +3 | |
| Initial Network Kandilli | Anchorage | 0 | - | 0 | - | 0 | - | 0 | - |
| Transit passage | 62 | - | 33 | - | 58 | - | 2 | - | |
| Case Study Sector Kandilli | Anchorage | 0 | - | 0 | - | 0 | - | 0 | - |
| Transit passage | 75 | +13 | 42 | +9 | 69 | +11 | 4 | +2 | |
| Initial Network Sector Türkeli | Anchorage | 0 | - | 33 | - | 22 | - | 5 | - |
| Transit passage | 45 | - | 24 | - | 27 | - | 6 | - | |
| Case Study Sector Türkeli | Anchorage | 0 | - | 45 | +12 | 31 | +9 | 10 | +5 |
| Transit passage | 52 | +7 | 29 | +5 | 35 | +8 | 10 | +4 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yıldız, S.; Uğurlu, Ö.; Wang, X.; Loughney, S.; Wang, J. Dynamic Accident Network Model for Predicting Marine Accidents in Narrow Waterways Under Variable Conditions: A Case Study of the Istanbul Strait. J. Mar. Sci. Eng. 2024, 12, 2305. https://doi.org/10.3390/jmse12122305
Yıldız S, Uğurlu Ö, Wang X, Loughney S, Wang J. Dynamic Accident Network Model for Predicting Marine Accidents in Narrow Waterways Under Variable Conditions: A Case Study of the Istanbul Strait. Journal of Marine Science and Engineering. 2024; 12(12):2305. https://doi.org/10.3390/jmse12122305
Chicago/Turabian StyleYıldız, Serdar, Özkan Uğurlu, Xinjian Wang, Sean Loughney, and Jin Wang. 2024. "Dynamic Accident Network Model for Predicting Marine Accidents in Narrow Waterways Under Variable Conditions: A Case Study of the Istanbul Strait" Journal of Marine Science and Engineering 12, no. 12: 2305. https://doi.org/10.3390/jmse12122305
APA StyleYıldız, S., Uğurlu, Ö., Wang, X., Loughney, S., & Wang, J. (2024). Dynamic Accident Network Model for Predicting Marine Accidents in Narrow Waterways Under Variable Conditions: A Case Study of the Istanbul Strait. Journal of Marine Science and Engineering, 12(12), 2305. https://doi.org/10.3390/jmse12122305