

Compensation Method for Current Measurement Errors in the Synchronous Reference Frame of a Small-Sized Surface Vehicle Propulsion Motor
Abstract
1. Introduction
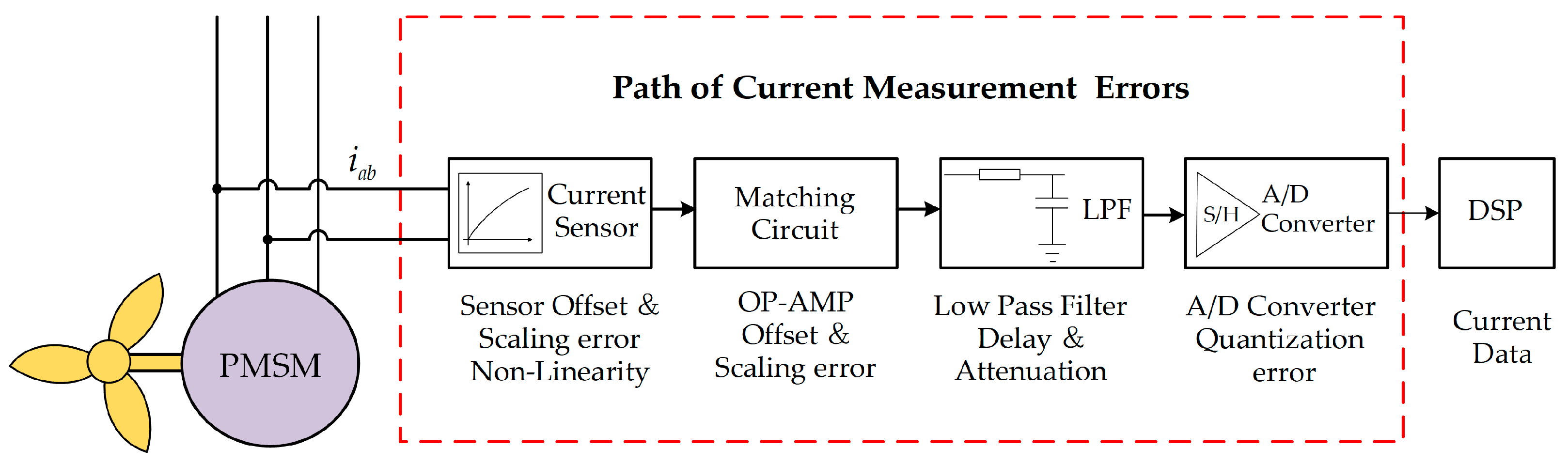
2. Analysis of Current Measurement Errors
2.1. Offset Error
2.2. Scaling Error
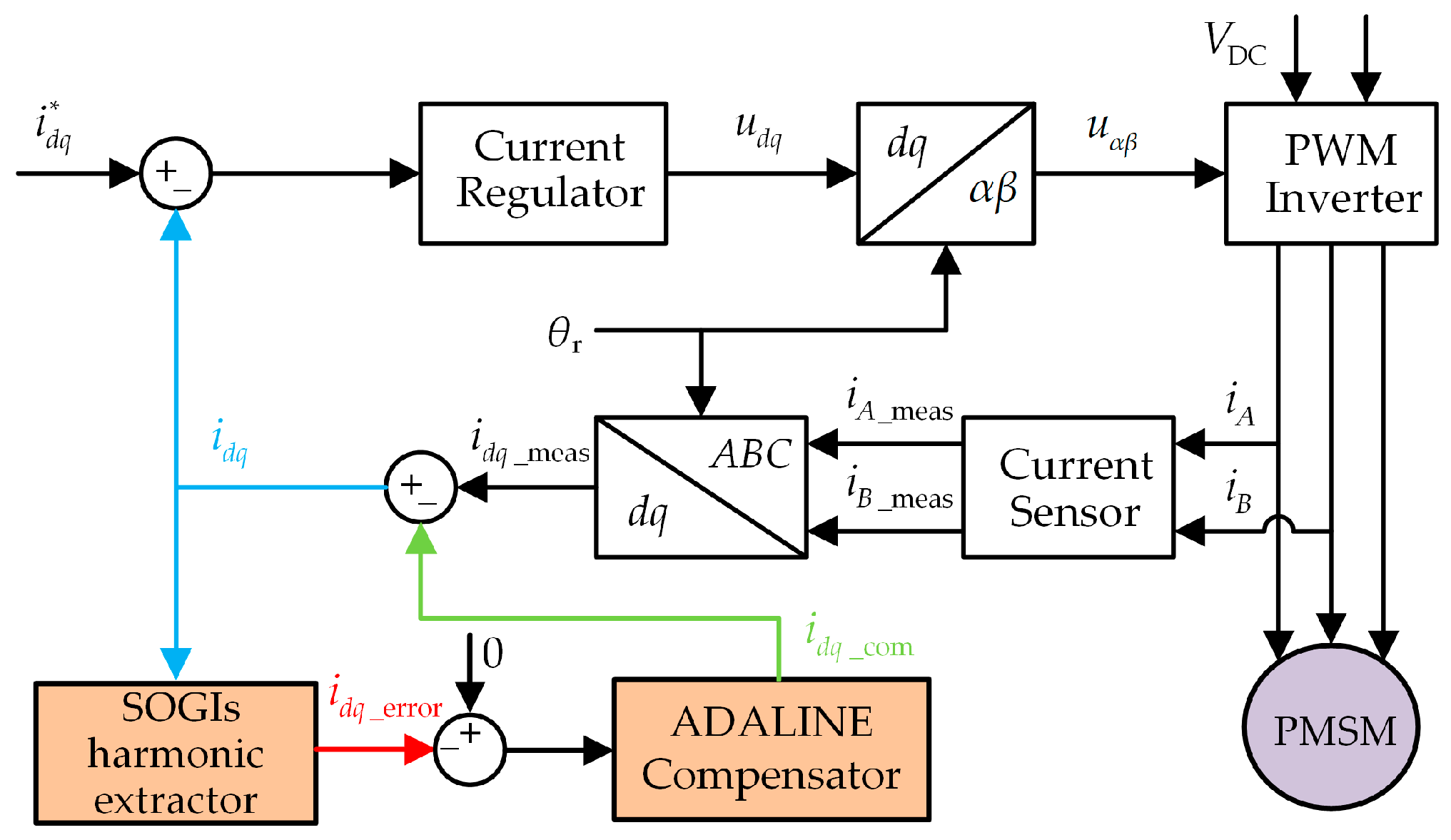
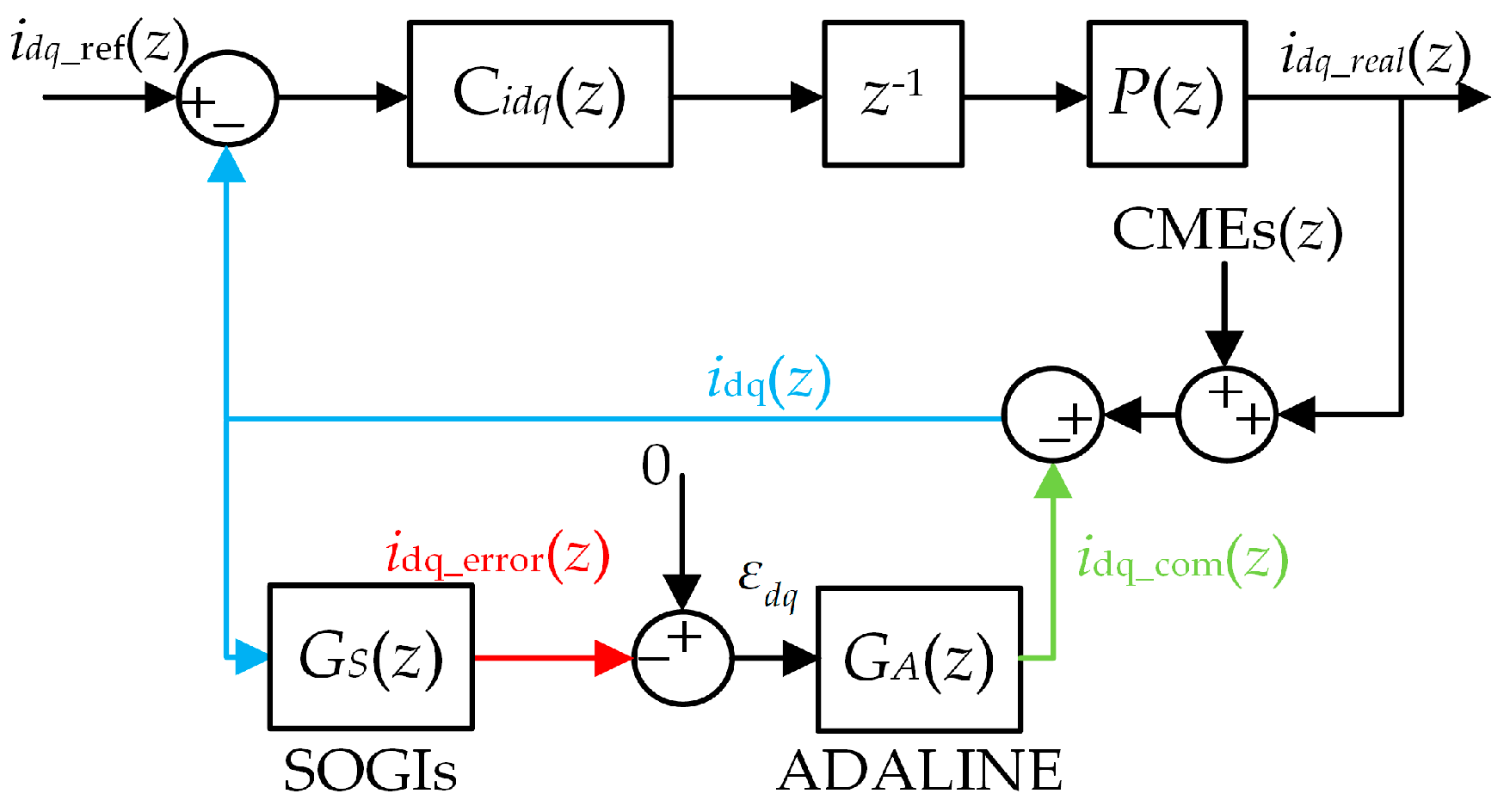
3. Proposed Strategy for Compensating Current Measurement Errors
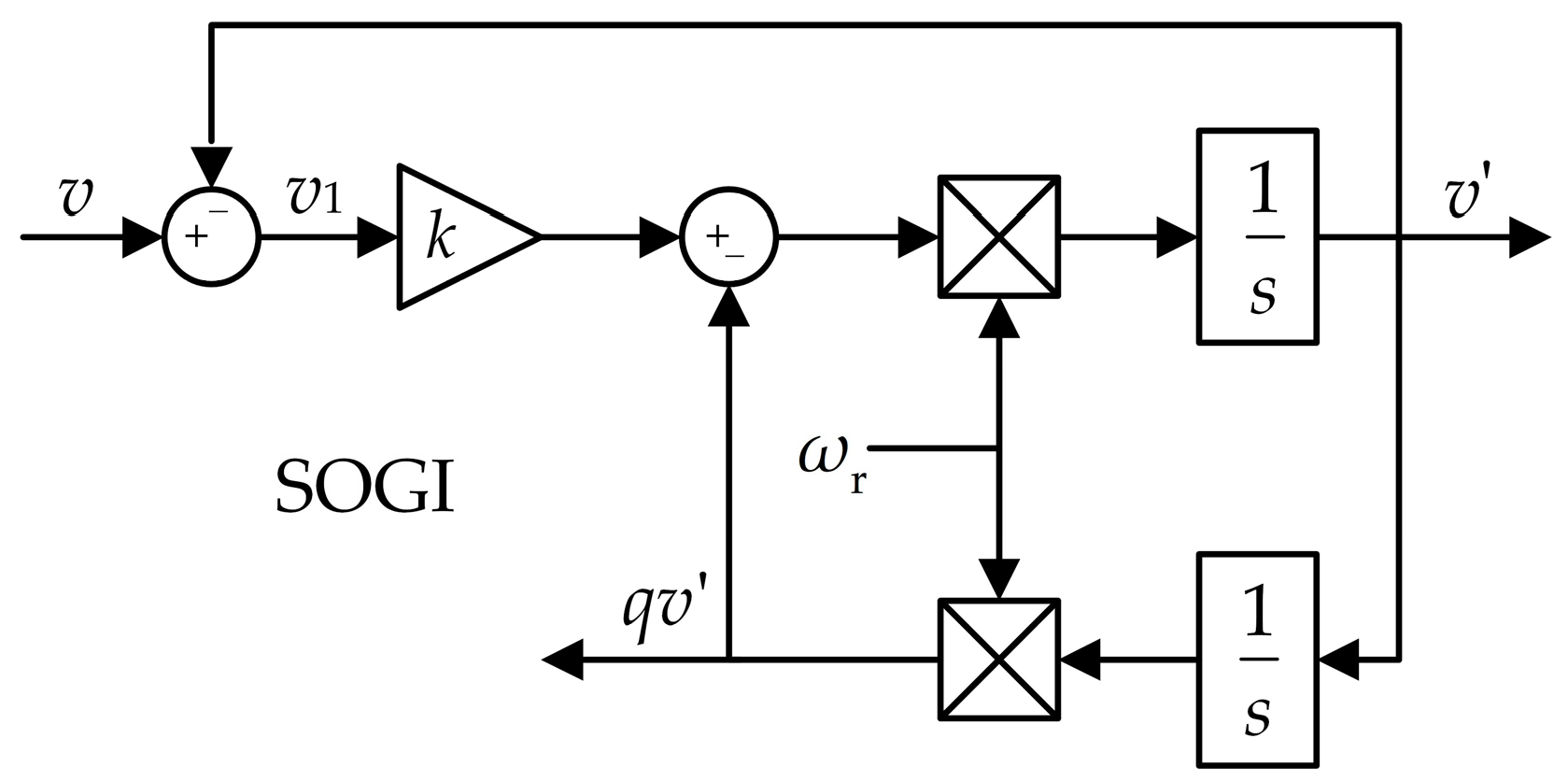
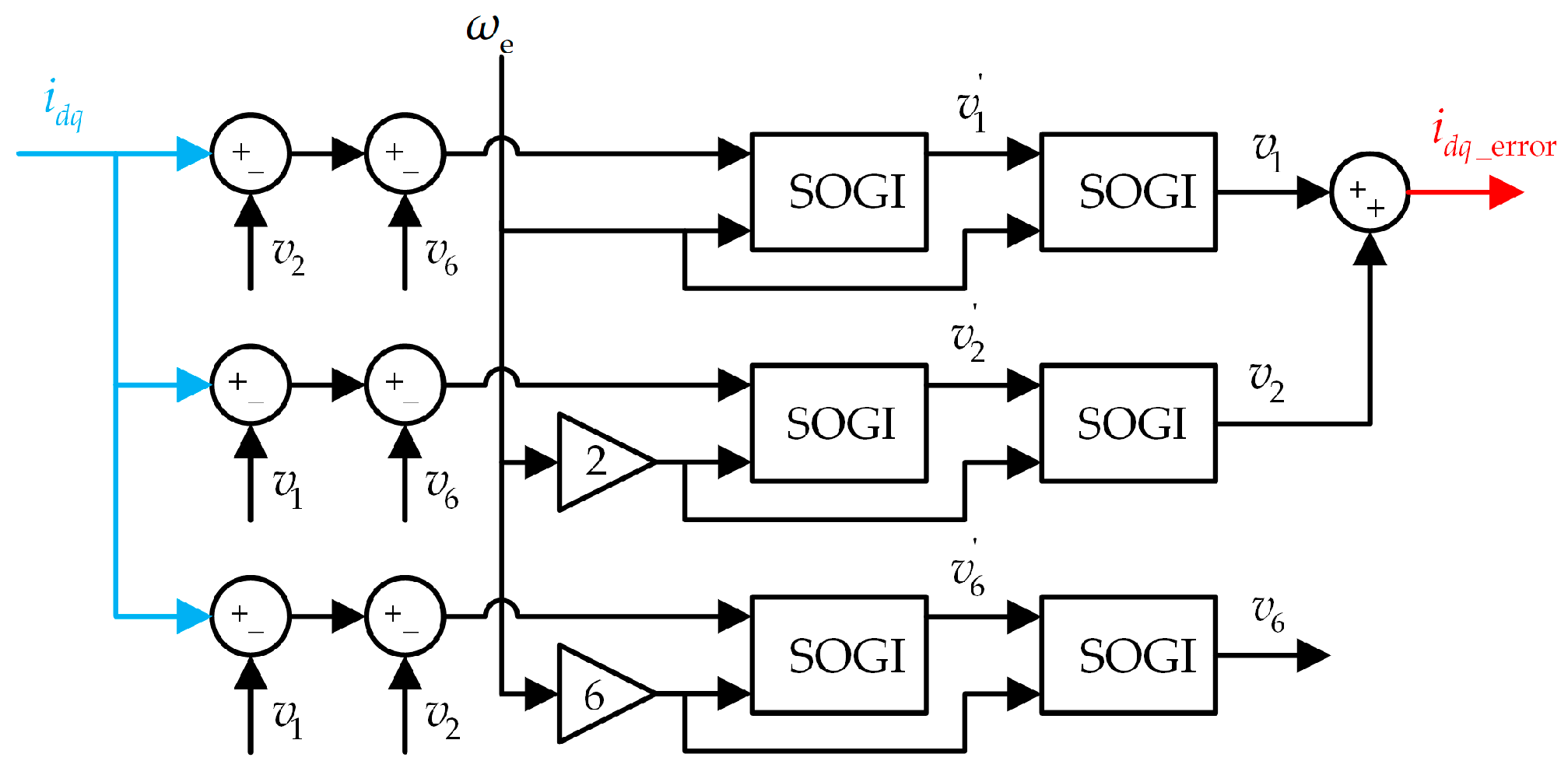
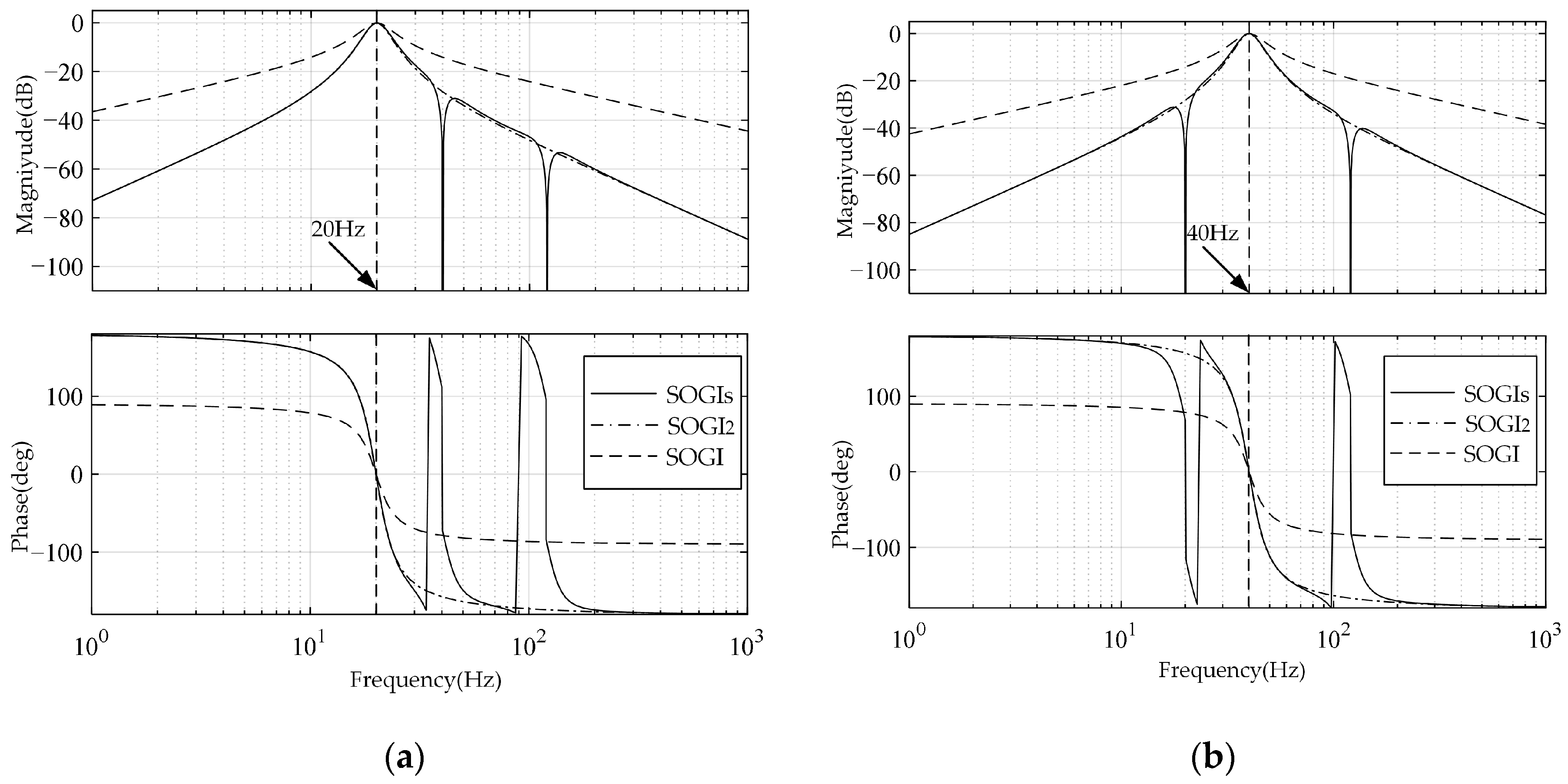
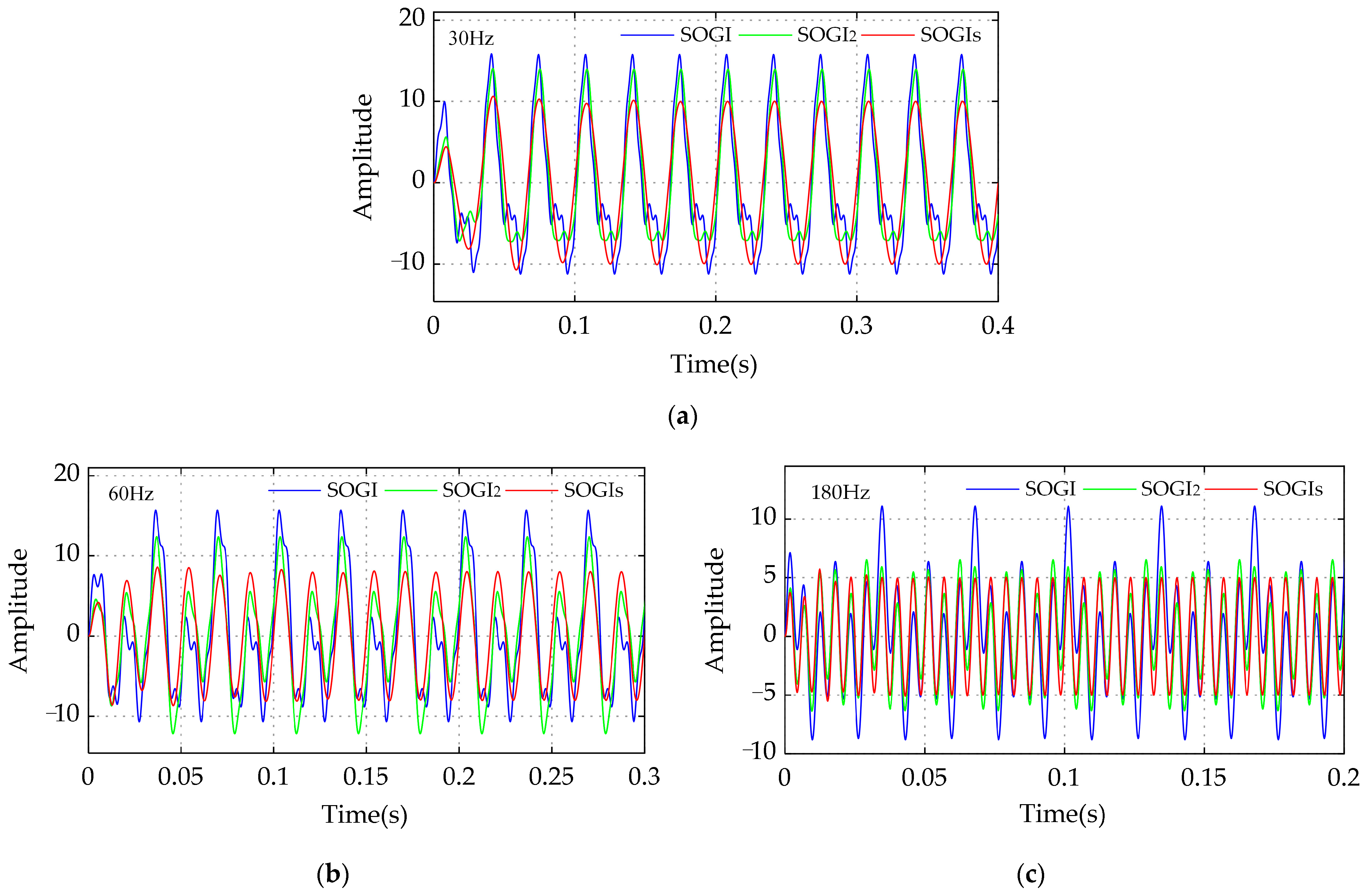
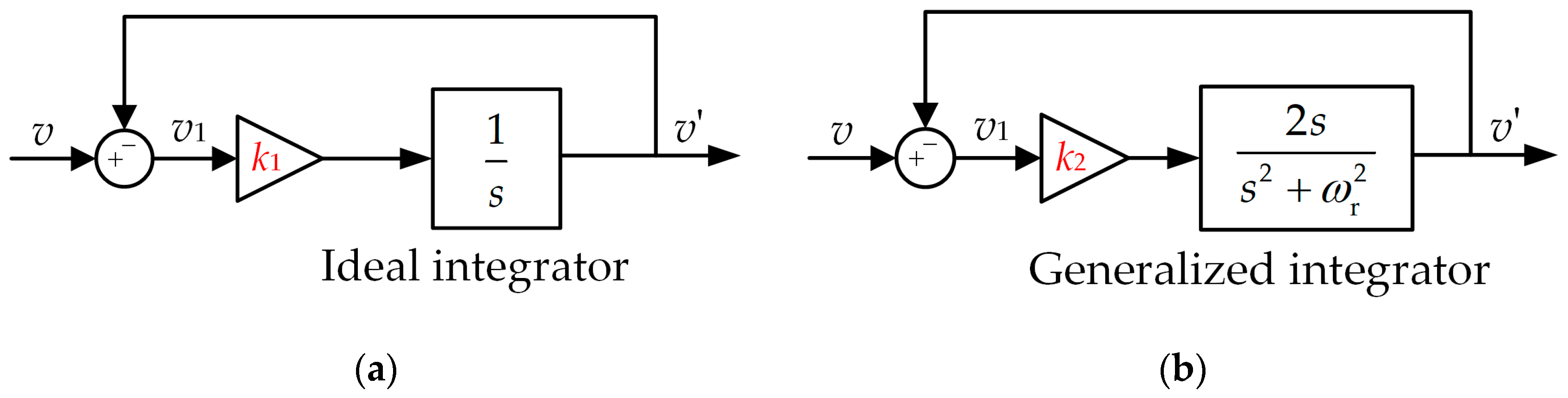
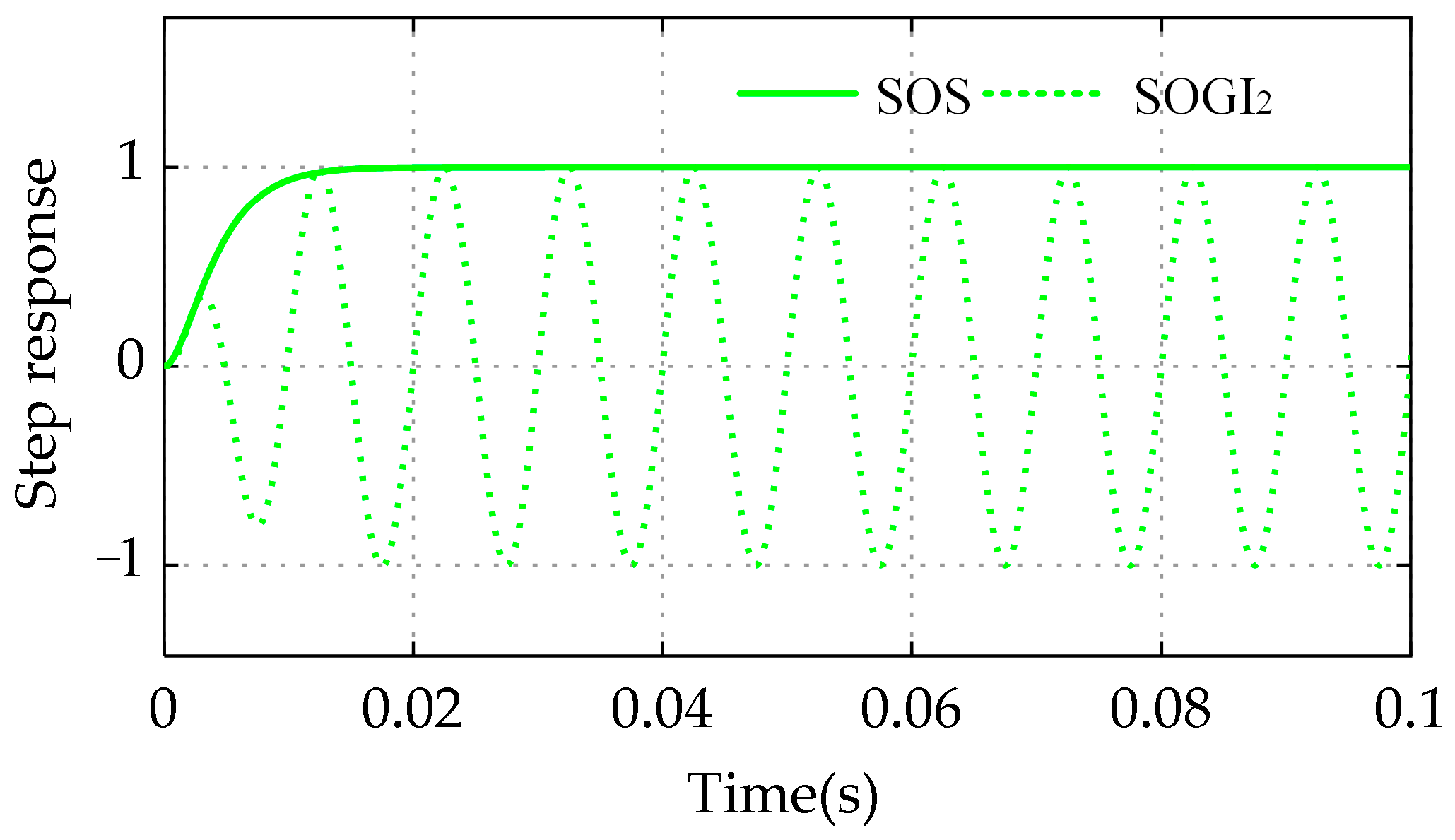
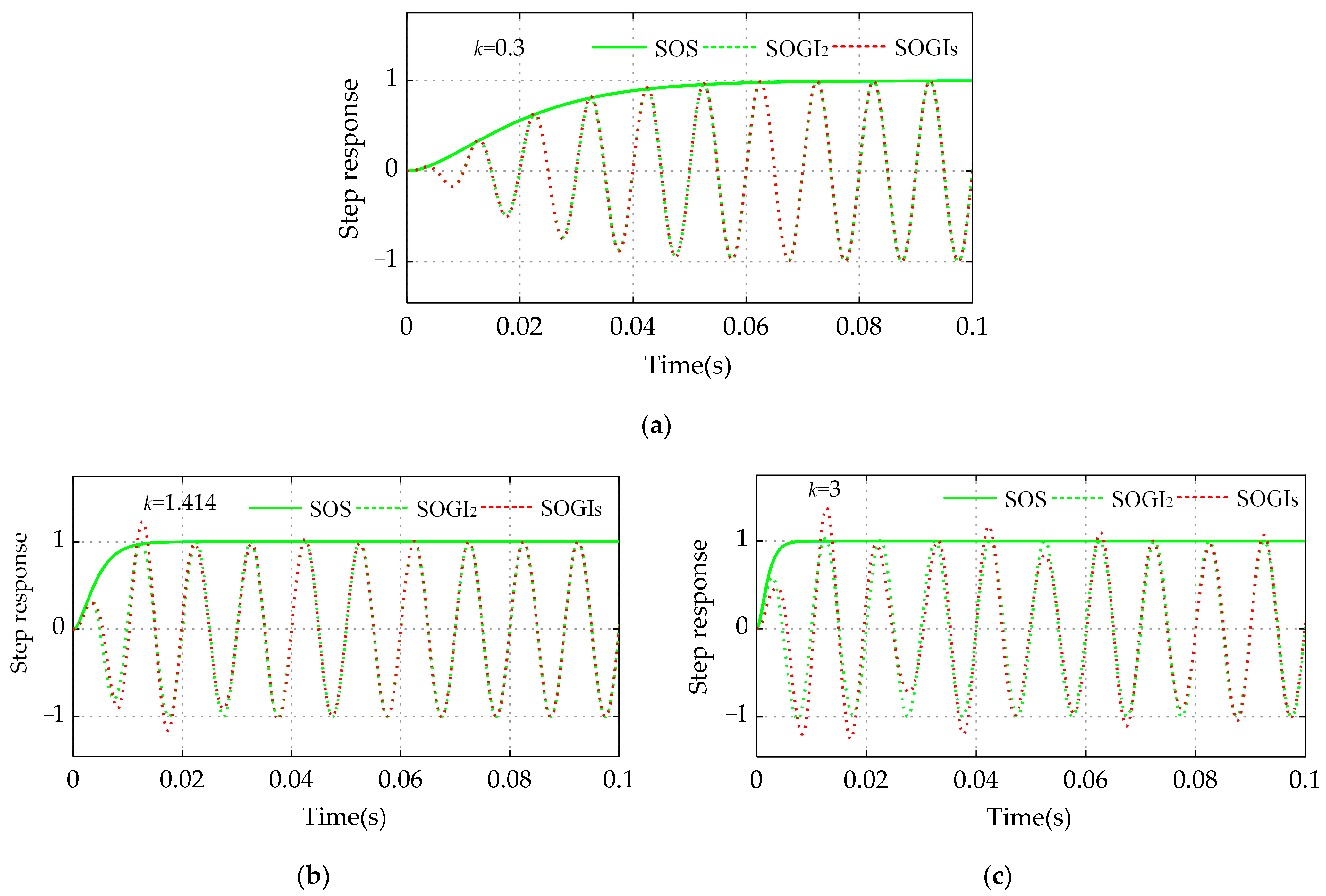
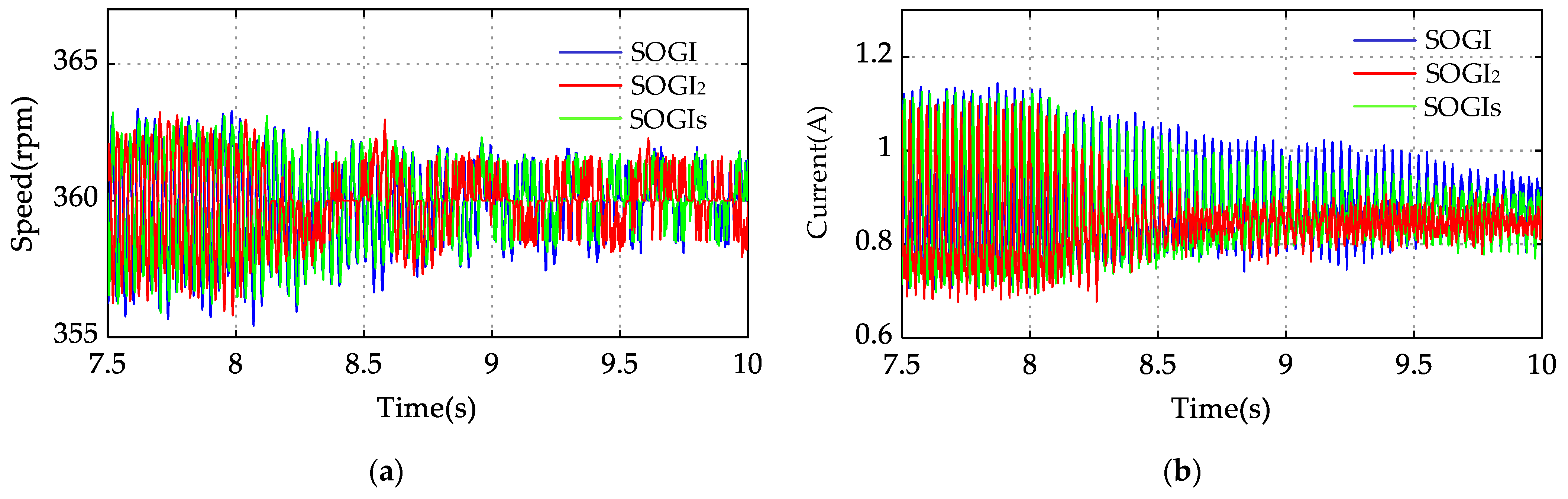
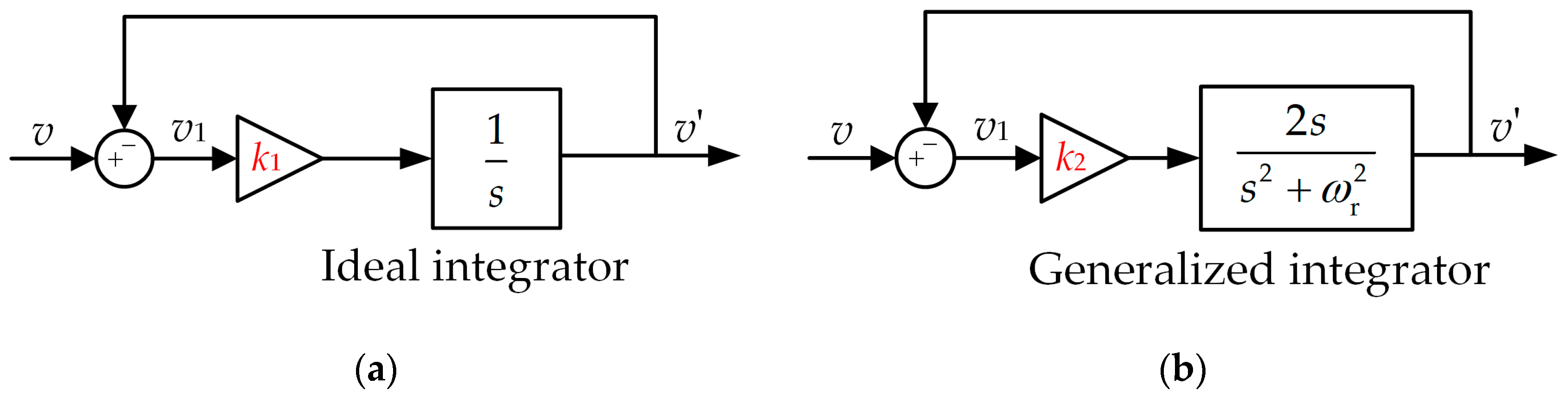
3.1. Cascade Decoupling SOGIs
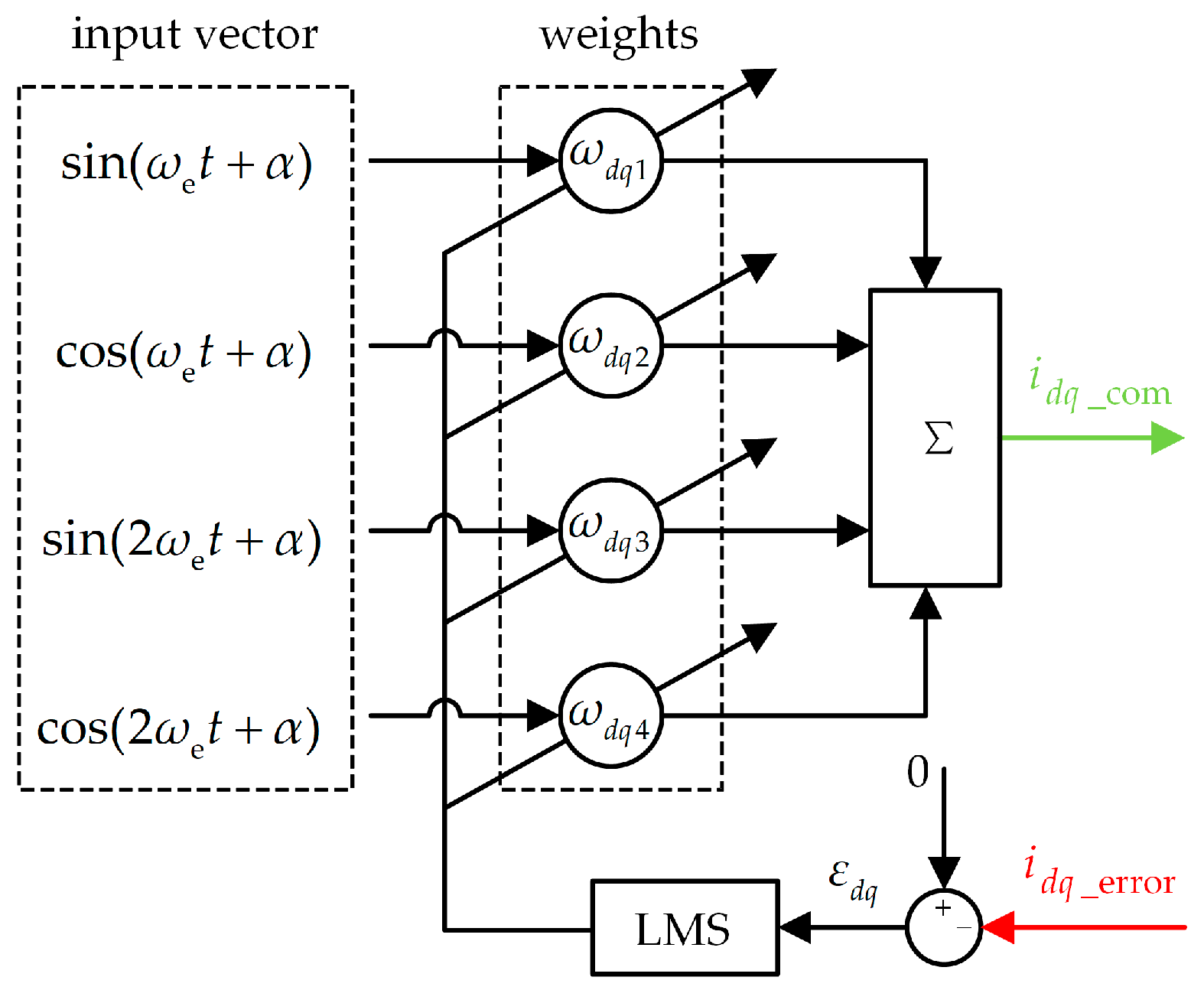
3.2. Compensation Based on ADALINEs
4. Experimental Results
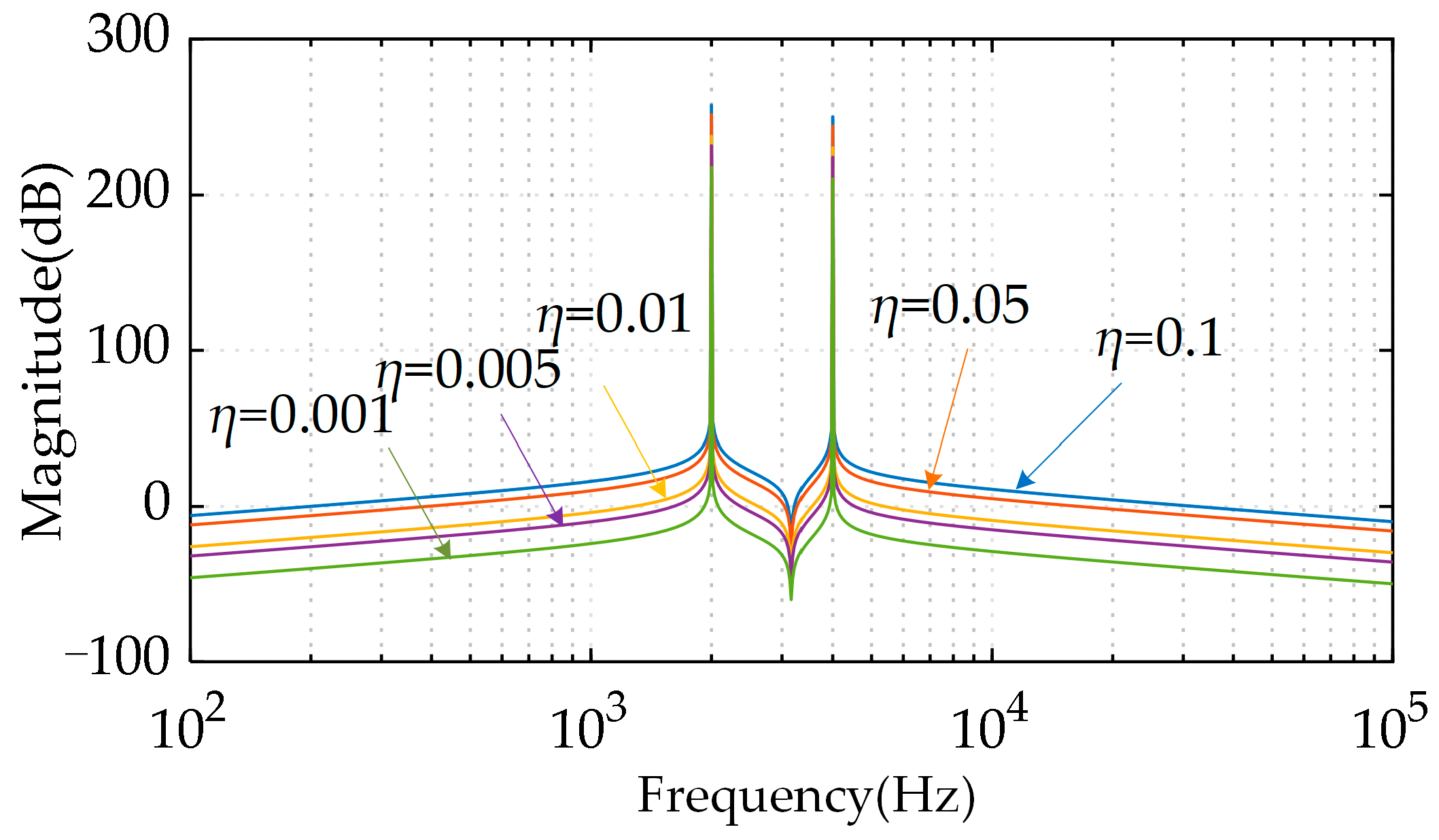
4.1. Parameter Determination
4.2. Steady-State Performance
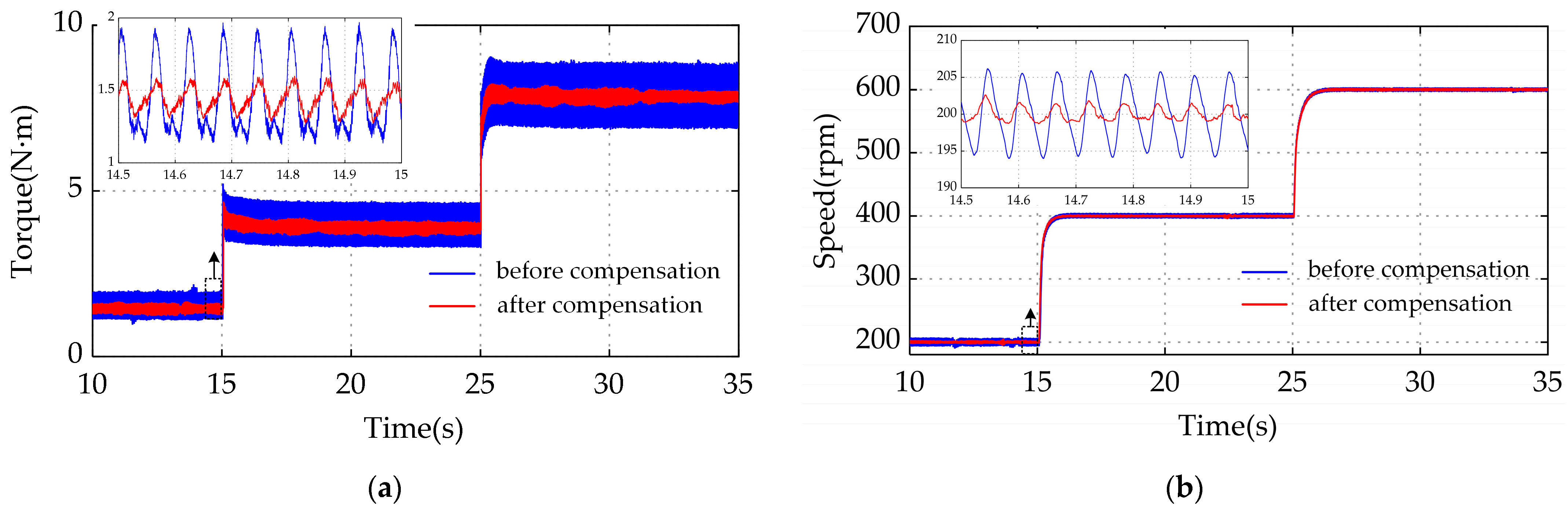
4.3. Dynamic Performance
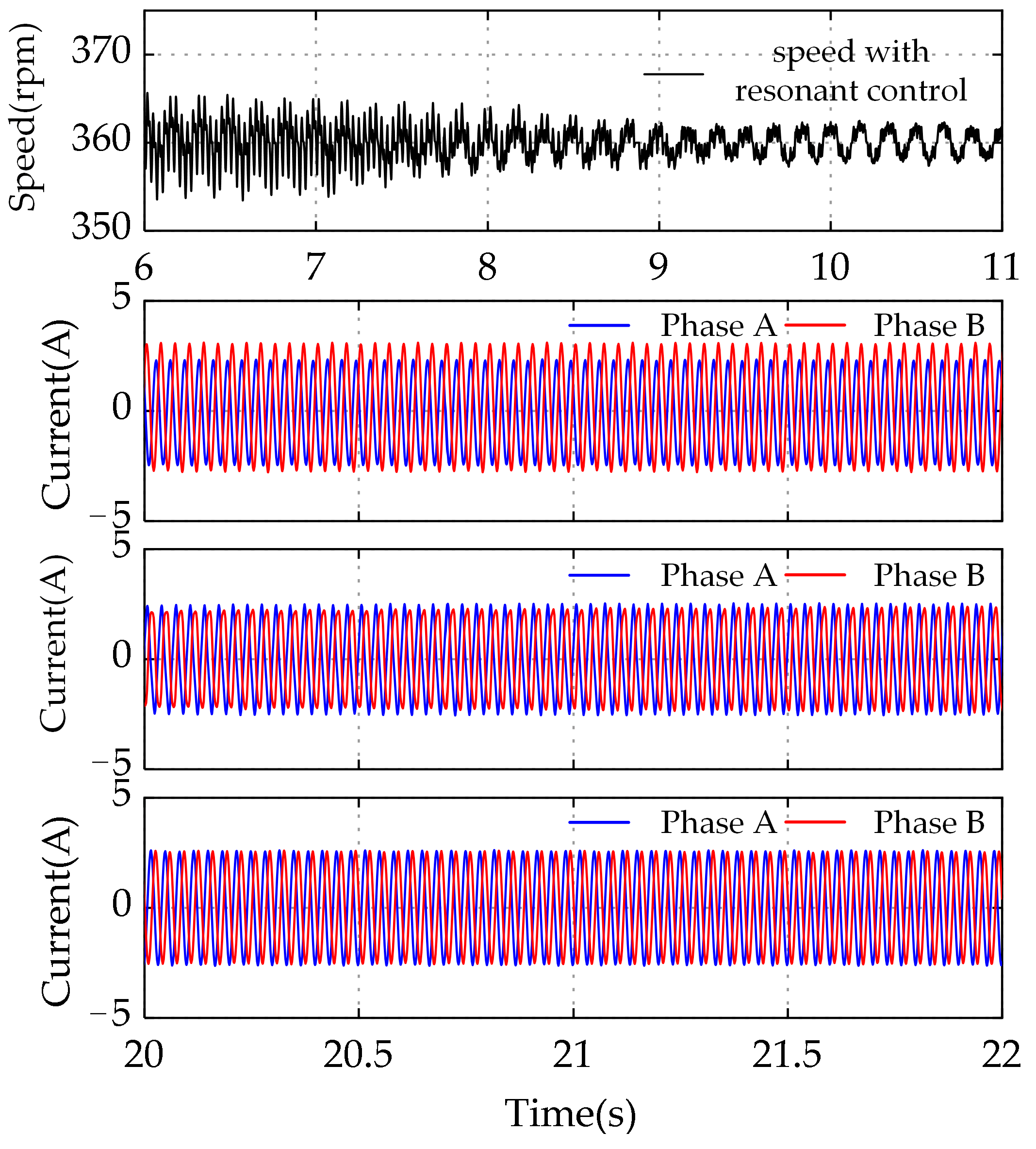
4.4. Comparison with Resonant Control in Ref. [15]
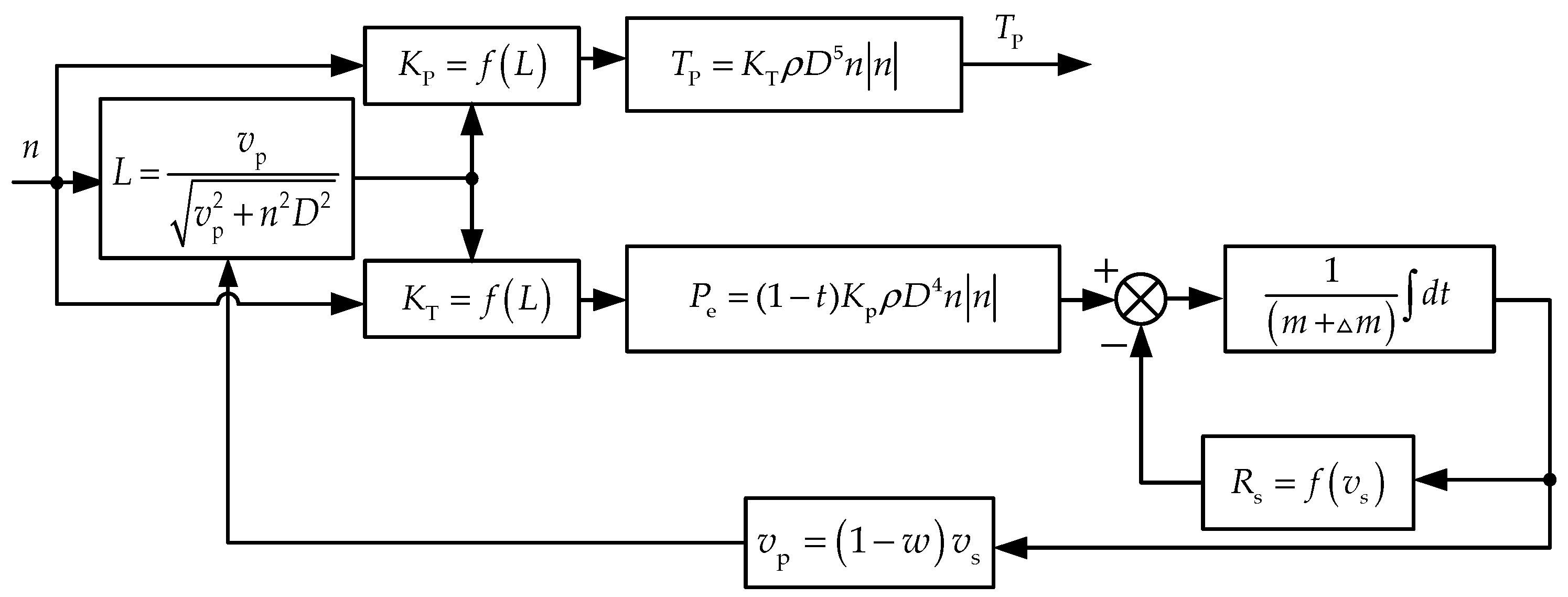
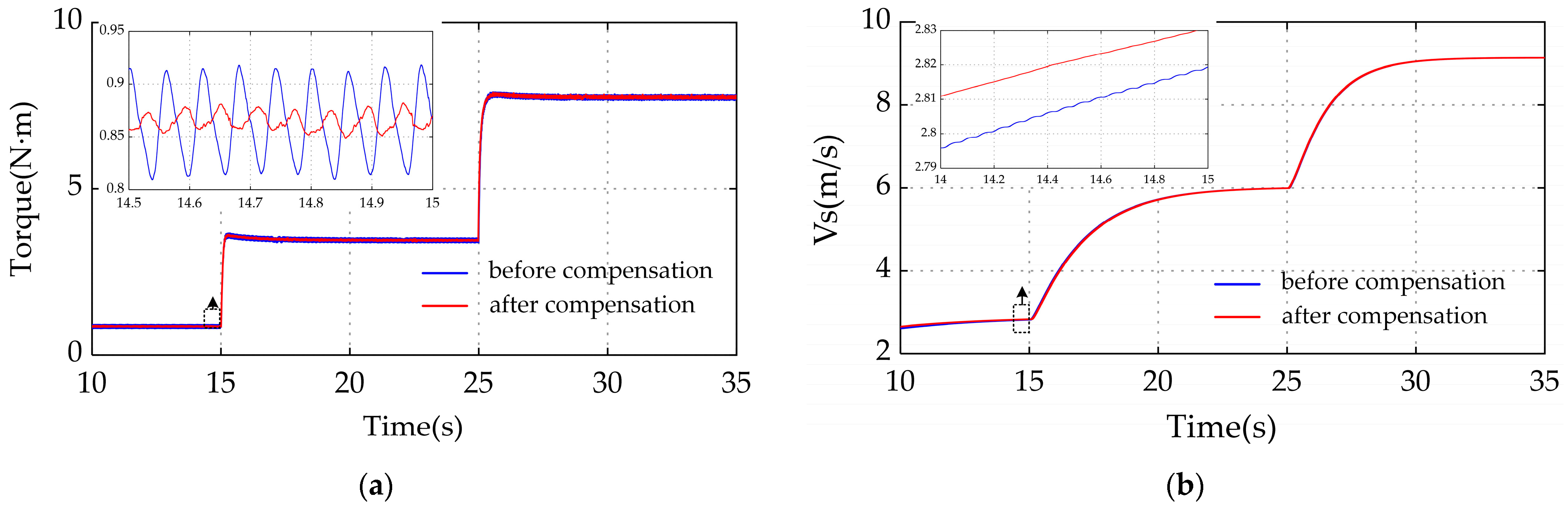
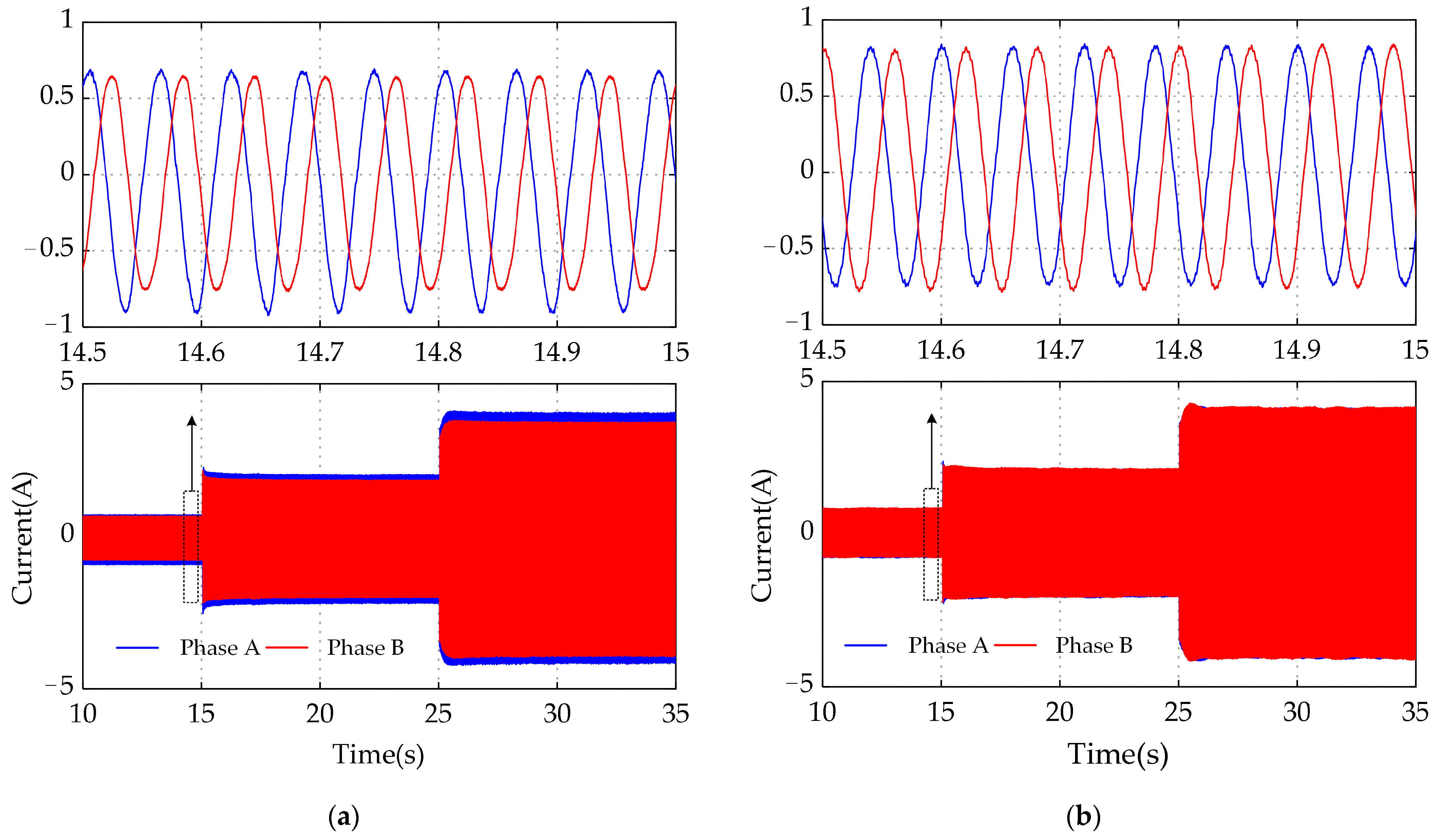
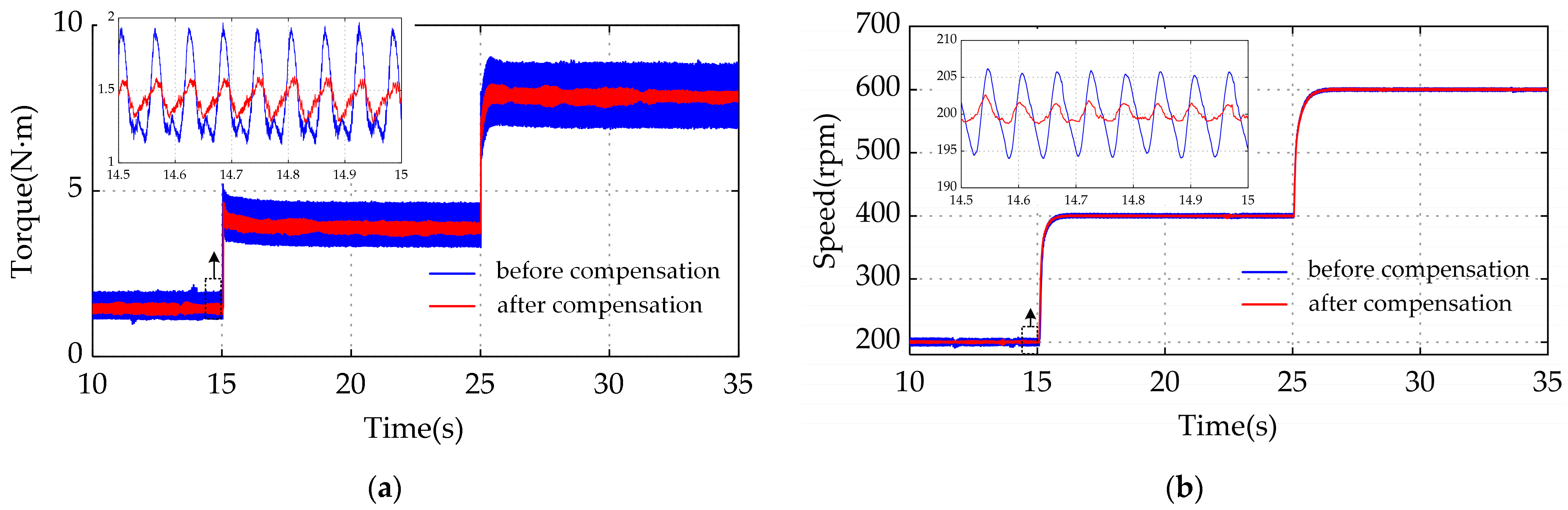
4.5. Experiments under Ship Propeller Load
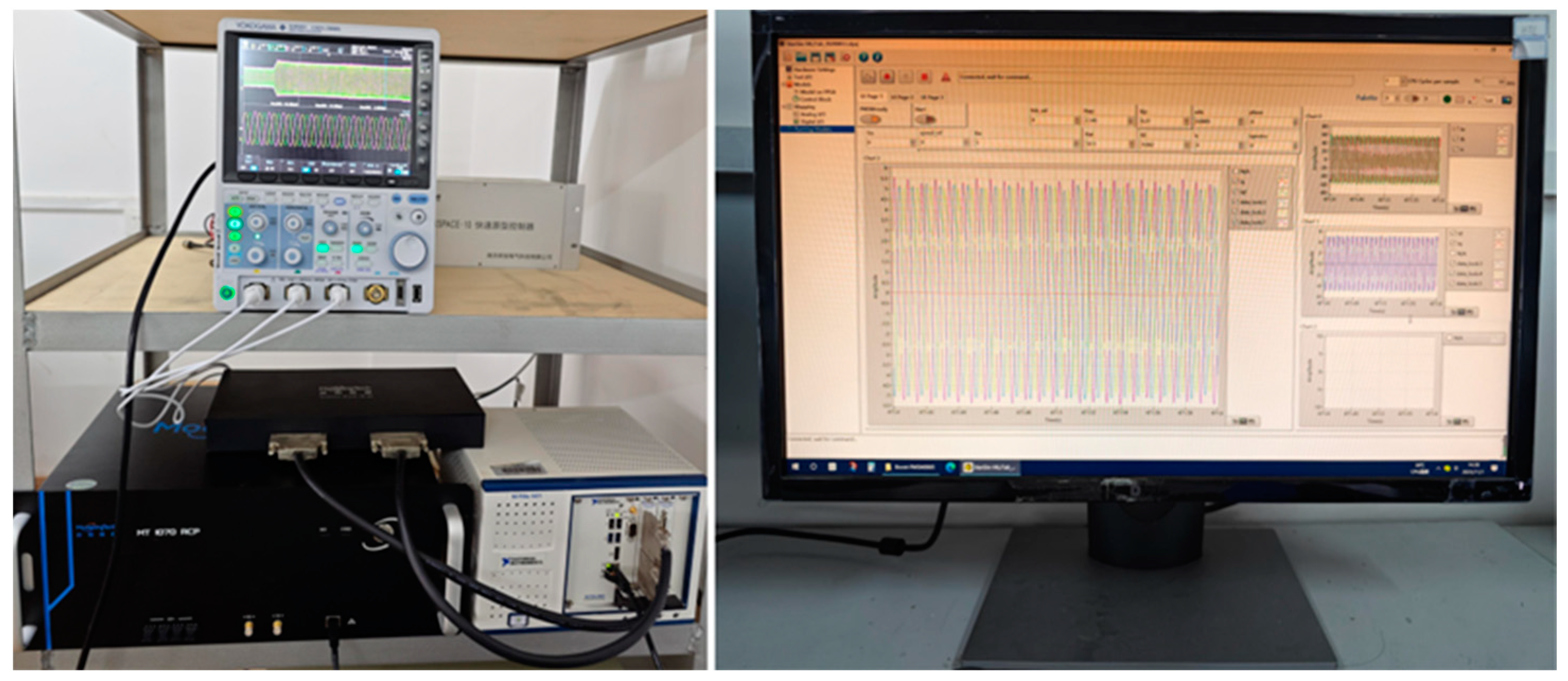
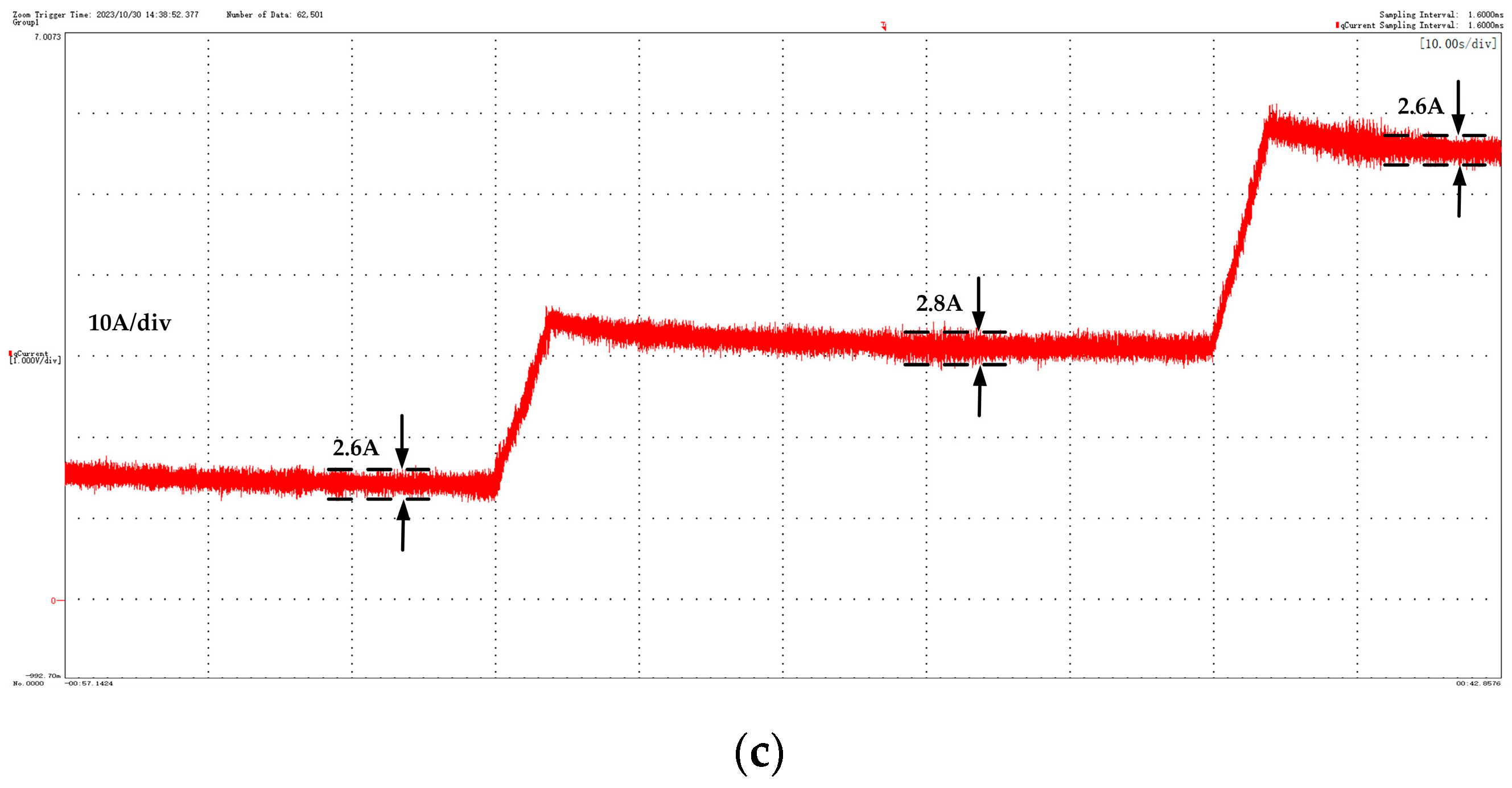
4.6. HIL Test Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| The Ship | |
| Pe | Propeller thrust. |
| Tp | Propeller torque. |
| ρ | Seawater density. |
| D | Propeller diameter. |
| vp | Propeller velocity (relative to water). |
| n | Propeller rotation speed. |
| Kp | Propeller thrust dimensionless coefficient. |
| KT | Drag torque dimensionless coefficient. |
| L | The ratio of advance. |
| hp | The distance covered by the propeller with each revolution. |
| t | Thrust deduction coefficient. |
| vs | Ship speed. |
| w | Wake coefficient. |
| Rs | Total resistance of the ship. |
| m | Mass of the hull. |
| Δm | Mass of the attached water. |
| The PMSM | |
| Real phase currents. | |
| Offset errors. | |
| id, iq | d-axis and q-axis current. |
| dq-axes current errors caused by offset errors. | |
| Transformation matrix from ABC reference frame to dq reference frame. | |
| Rotational speed in electrical angle. | |
| P | Pole pairs of the motor. |
| λr | Magnetic flux of the permanent magnet. |
| Te | Electromagnetic torque. |
| Electromagnetic torque changes caused by offset errors. | |
| TL | Load torque. |
| J | Moment of inertia. |
| ωm | Mechanical angular speed. |
| , | Scaling gains. |
| I | Current amplitude. |
| Stator position. | |
| Proposed control structure | |
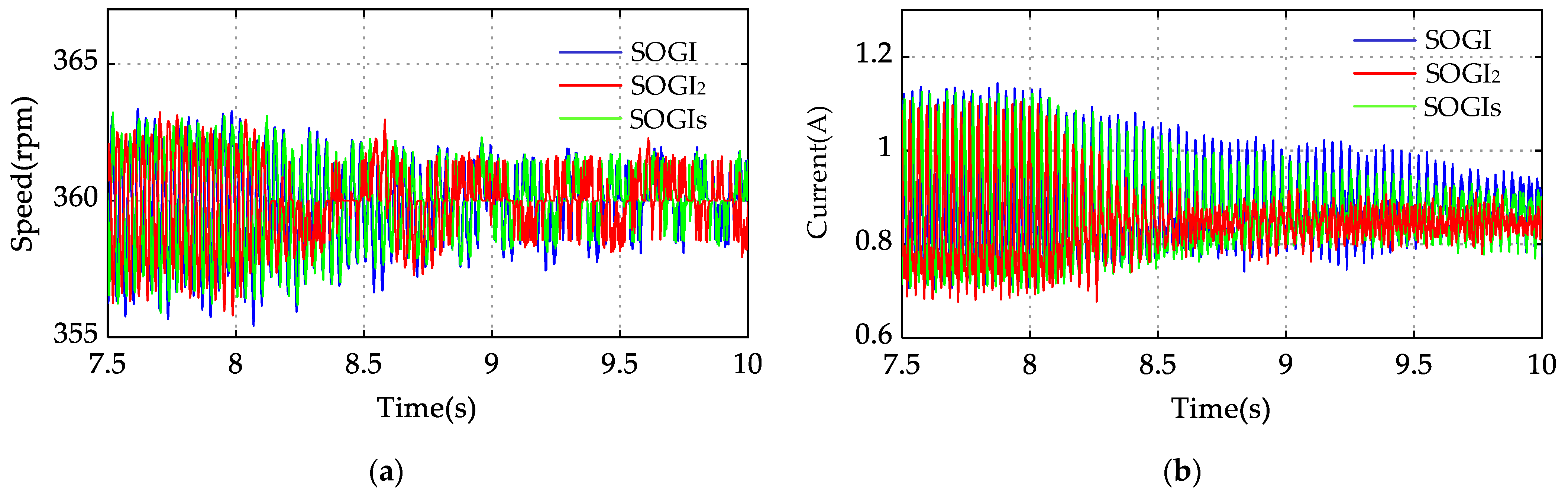
| SOGI | Second-order generalized integrator. |
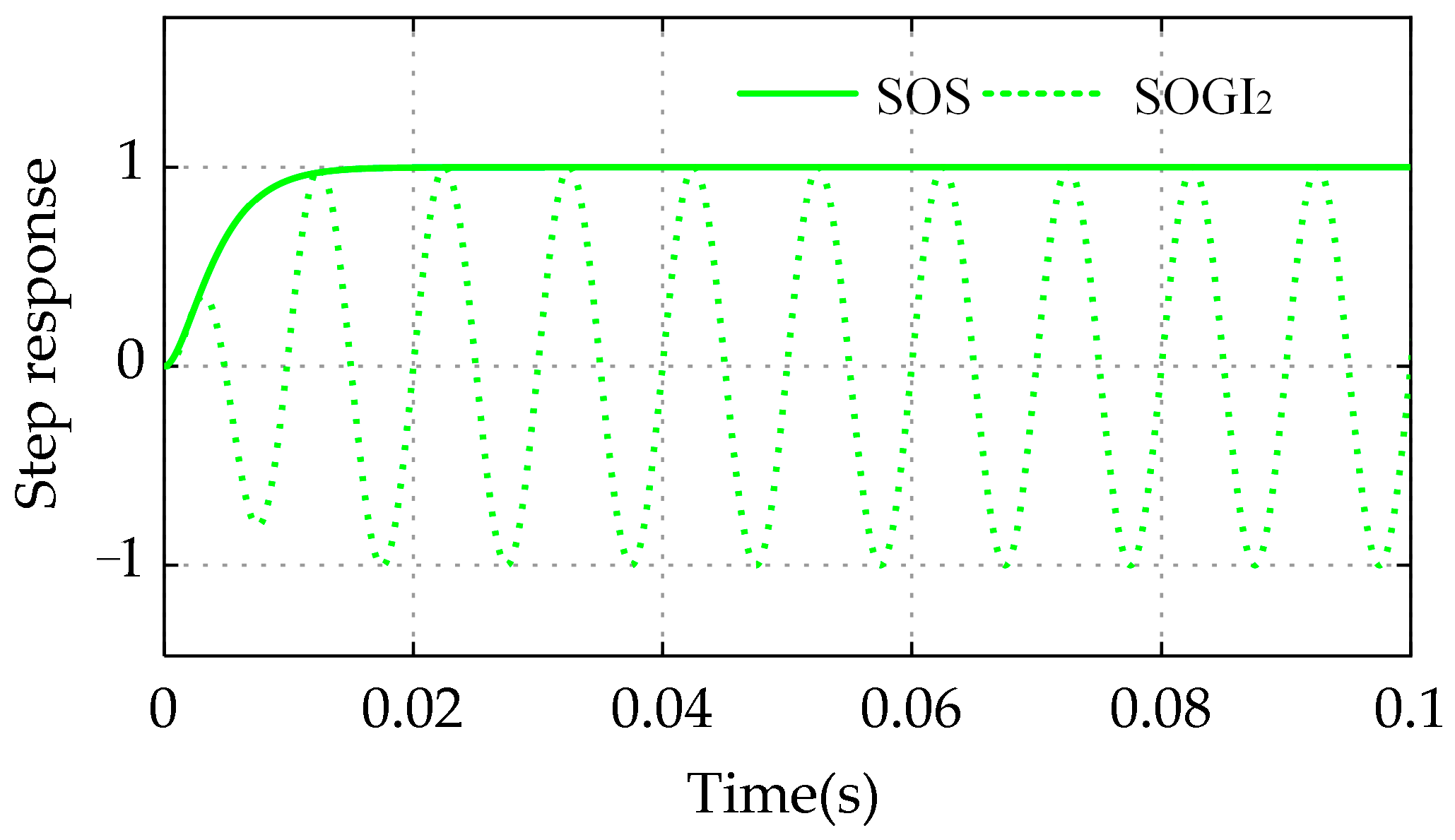
| SOGI2 | Series connection of two SOGI structures. |
| SOGIs | Cascade decoupling SOGI structures in Figure 3. |
| Resonance frequency of the SOGI, equal to . | |
| k | Gain value of the SOGI structures. |
| v1, v2, v6 | One, two, and six harmonic extraction components of the SOGI extractor. |
| n | Harmonic order. |
| ADALINE | Adaptive linear neuron. |
| dc component in dq-axes current. | |
| , , , | Magnitudes of the other terms in Fourier expansion formula. |
| Rotor position angle of the PMSM. | |
| dq-axes compensation current. | |
| Input vector and the weight vector of the ADALINE compensator. | |
| Learning rate of the ADALINE compensator. | |
| Feedback error. | |
References
- Haxhiu, A.; Abdelhakim, A.; Kanerva, S.; Bogen, J. Electric Power Integration Schemes of the Hybrid Fuel Cells and Batteries-Fed Marine Vessels-An Overview. IEEE Trans. Transp. Electrif. 2022, 8, 1885–1905. [Google Scholar] [CrossRef]
- Bai, H.; Yu, B.; Gu, W. Research on Position Sensorless Control of RDT Motor Based on Improved SMO with Continuous Hy-perbolic Tangent Function and Improved Feedforward PLL. J. Mar. Sci. Eng. 2023, 11, 642. [Google Scholar] [CrossRef]
- Qin, J.; Du, J. Robust adaptive asymptotic trajectory tracking control for underactuated surface vessels subject to unknown dynamics and input saturation. J. Mar. Sci. Technol. 2022, 27, 307–319. [Google Scholar] [CrossRef]
- Gu, N.; Wang, D.; Peng, Z.H.; Wang, J. Safety-Critical Containment Maneuvering of Underactuated Autonomous Surface Vehicles Based on Neurodynamic Optimization With Control Barrier Functions. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 2882–2895. [Google Scholar] [CrossRef]
- Guo, H.; Xiang, T.; Liu, Y.; Zhang, Q.; Liu, S.; Guan, B. Active Disturbance Rejection Control Method for Marine Permanent-Magnet Propulsion Motor Based on Improved ESO and Nonlinear Switching Function. J. Mar. Sci. Eng. 2023, 11, 1751. [Google Scholar] [CrossRef]
- Ren, J.-J.; Liu, Y.-C.; Wang, N.; Liu, S.-Y. Sensorless control of ship propulsion interior permanent magnet synchronous motor based on a new sliding mode observer. ISA Trans. 2015, 54, 15–26. [Google Scholar] [CrossRef]
- Hu, M.; Hua, W.; Wu, Z.; Dai, N.; Xiao, H.; Wang, W. Compensation of Current Measurement Offset Error for Permanent Magnet Synchronous Machines. IEEE Trans. Power Electron. 2020, 35, 11119–11128. [Google Scholar] [CrossRef]
- Cho, K.-R.; Seok, J.-K. Correction on current measurement errors for accurate flux estimation of AC drives at low stator frequency. IEEE Trans. Ind. Appl. 2008, 44, 594–603. [Google Scholar] [CrossRef]
- Chung, D.W.; Sul, S.K. Analysis and compensation of current measurement error in vector-controlled AC motor drives. IEEE Trans. Ind. Appl. 1998, 34, 340–345. [Google Scholar] [CrossRef]
- Chuan, H.; Fazeli, S.M.; Wu, Z.; Burke, R. Mitigating the Torque Ripple in Electric Traction Using Proportional Integral Resonant Controller. IEEE Trans. Veh. Technol. 2020, 69, 10820–10831. [Google Scholar] [CrossRef]
- Han, J.; Kim, B.-H.; Sui, S.-k. Effect of Current Measurement Error in Angle Estimation of Permanent Magnet AC Motor Sensorless Control. In Proceedings of the 3rd IEEE International Future Energy Electronics Conference/Energy Conversion Congress and Exposition (ECCE) Asia, Taiwan, China, 4–7 June 2017; pp. 2171–2176. [Google Scholar]
- Choi, C.-H.; Cho, K.-R.; Seok, J.-K. Inverter nonlinearity compensation in the presence of current measurement errors and switching device parameter uncertainties. IEEE Trans. Power Electron. 2007, 22, 576–583. [Google Scholar] [CrossRef]
- Shen, Z.; Jiang, D. Dead-Time Effect Compensation Method Based on Current Ripple Prediction for Voltage-Source Inverters. IEEE Trans. Power Electron. 2019, 34, 971–983. [Google Scholar] [CrossRef]
- Myers, G.P.; Degner, M.W. Compensation Method for Current-Sensor Gain Error. U.S. Patent 6,998,811, 14 February 2006. [Google Scholar]
- Zhang, Q.; Guo, H.; Guo, C.; Liu, Y.; Wang, D.; Lu, K.; Zhang, Z.; Zhuang, X.; Chen, D. An adaptive proportional-integral-resonant controller for speed ripple suppression of PMSM drive due to current measurement error. Int. J. Electr. Power Energy Syst. 2021, 129, 106866. [Google Scholar] [CrossRef]
- Zhou, Z.; Xia, C.; Yan, Y.; Wang, Z.; Shi, T. Disturbances Attenuation of Permanent Magnet Synchronous Motor Drives Using Cascaded Predictive-Integral-Resonant Controllers. IEEE Trans. Power Electron. 2018, 33, 1514–1527. [Google Scholar] [CrossRef]
- Xia, C.; Ji, B.; Yan, Y. Smooth Speed Control for Low-Speed High-Torque Permanent-Magnet Synchronous Motor Using Proportional-Integral-Resonant Controller. IEEE Trans. Ind. Electron. 2015, 62, 2123–2134. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, H.; Liu, Y.; Guo, C.; Lu, K.; Wang, D.; Zhang, Z.; Sun, J. Robust plug-in repetitive control for speed smoothness of cascaded-PI PMSM drive. Mech. Syst. Signal Proc. 2022, 163, 108090. [Google Scholar] [CrossRef]
- Tang, M.; Gaeta, A.; Formentini, A.; Zanchetta, P. A Fractional Delay Variable Frequency Repetitive Control for Torque Ripple Reduction in PMSMs. IEEE Trans. Ind. Appl. 2017, 53, 5553–5562. [Google Scholar] [CrossRef]
- Tang, M.; Formentini, A.; Odhano, S.A.; Zanchetta, P. Torque Ripple Reduction of PMSMs Using a Novel Angle-Based Repetitive Observer. IEEE Trans. Ind. Electron. 2020, 67, 2689–2699. [Google Scholar] [CrossRef]
- Liu, J.; Li, H.; Deng, Y. Torque Ripple Minimization of PMSM Based on Robust ILC Via Adaptive Sliding Mode Control. IEEE Trans. Power Electron. 2018, 33, 3655–3671. [Google Scholar] [CrossRef]
- Qian, W.; Panda, S.K.; Xu, J.X. Speed ripple minimization in PM synchronous motor using iterative learning control. IEEE Trans. Energy Convers. 2005, 20, 53–61. [Google Scholar] [CrossRef]
- Lee, K.-W.; Kim, S.-I. Dynamic Performance Improvement of a Current Offset Error Compensator in Current Vector-Controlled SPMSM Drives. IEEE Trans. Ind. Electron. 2019, 66, 6727–6736. [Google Scholar] [CrossRef]
- Harke, M.C.; Guerrero, J.M.; Degner, M.W.; Briz, F.; Lorenz, R.D. Current measurement gain tuning using high-frequency signal injection. IEEE Trans. Ind. Appl. 2008, 44, 1578–1586. [Google Scholar] [CrossRef]
- Jung, H.-S.; Hwang, S.-H.; Kim, J.-M.; Kim, C.-U.; Choi, C. Diminution of current-measurement error for vector-controlled ac motor drives. IEEE Trans. Ind. Appl. 2006, 42, 1249–1256. [Google Scholar] [CrossRef]
- Kim, M.; Sul, S.-K.; Lee, J. Compensation of Current Measurement Error for Current-Controlled PMSM Drives. IEEE Trans. Ind. Appl. 2014, 50, 3365–3373. [Google Scholar] [CrossRef]
- Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. A new single-phase PLL structure based on second order generalized integrator. In Proceedings of the 37th IEEE Power Electronics Specialist Conference (PESC 2006), Cheju Island, Republic of Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Rodriguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant Frequency-Locked Loop for Grid Synchronization of Power Converters Under Distorted Grid Conditions. IEEE Trans. Ind. Electron. 2011, 58, 127–138. [Google Scholar] [CrossRef]
- Matas, J.; Castilla, M.; Miret, J.; Garcia de Vicuna, L.; Guzman, R. An Adaptive Prefiltering Method to Improve the Speed/Accuracy Tradeoff of Voltage Sequence Detection Methods Under Adverse Grid Conditions. IEEE Trans. Ind. Electron. 2014, 61, 2139–2151. [Google Scholar] [CrossRef]
- Wang, G.; Ding, L.; Li, Z.; Xu, J.; Zhang, G.; Zhan, H.; Ni, R.; Xu, D. Enhanced Position Observer Using Second-Order Generalized Integrator for Sensorless Interior Permanent Magnet Synchronous Motor Drives. IEEE Trans. Energy Convers. 2014, 29, 486–495. [Google Scholar] [CrossRef]
- Liu, B.; Zhou, B.; Ni, T. Principle and Stability Analysis of an Improved Self-Sensing Control Strategy for Surface-Mounted PMSM Drives Using Second-Order Generalized Integrators. IEEE Trans. Energy Convers. 2018, 33, 126–136. [Google Scholar] [CrossRef]
- Xu, W.; Jiang, Y.; Mu, C.; Blaabjerg, F. Improved Nonlinear Flux Observer-Based Second-Order SOIFO for PMSM Sensorless Control. IEEE Trans. Power Electron. 2019, 34, 565–579. [Google Scholar] [CrossRef]
- Zhao, R.; Xin, Z.; Loh, P.C.; Blaabjerg, F. A Novel Flux Estimator Based on Multiple Second-Order Generalized Integrators and Frequency-Locked Loop for Induction Motor Drives. IEEE Trans. Power Electron. 2017, 32, 6286–6296. [Google Scholar] [CrossRef]
- Xin, Z.; Zhao, R.; Blaabjerg, F.; Zhang, L.; Loh, P.C. An Improved Flux Observer for Field-Oriented Control of Induction Motors Based on Dual Second-Order Generalized Integrator Frequency- Locked Loop. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 513–525. [Google Scholar] [CrossRef]
- Yoo, J.; Kim, H.-S.; Sul, S.-K. Design of Frequency-Adaptive Flux Observer in PMSM Drives Robust to Discretization Error. IEEE Trans. Ind. Electron. 2022, 69, 3334–3344. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, H.; Liu, Y.; Guo, C.; Zhang, F.; Zhang, Z.; Li, G. A Novel Error-Injected Solution for Compensation of Current Measurement Errors in PMSM Drive. IEEE Trans. Ind. Electron. 2023, 70, 4608–4619. [Google Scholar] [CrossRef]
- Zhu, H.; Fujimoto, H. Suppression of Current Quantization Effects for Precise Current Control of SPMSM Using Dithering Techniques and Kalman Filter. IEEE Trans. Ind. Inform. 2014, 10, 1361–1371. [Google Scholar] [CrossRef]
- Asiminciaei, L.; Blaabjerg, F.; Hansen, S. Detection is key—Harmonic detection methods for active power filter applications. IEEE Ind. Appl. Mag. 2007, 13, 22–33. [Google Scholar] [CrossRef]
- Xin, Z.; Wang, X.; Qin, Z.; Lu, M.; Loh, P.C.; Blaabjerg, F. An Improved Second-Order Generalized Integrator Based Quadrature Signal Generator. IEEE Trans. Power Electron. 2016, 31, 8068–8073. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, Z.Q.; Bin, H.; Gong, L. A Commutation Error Compensation Strategy for High-Speed Brushless DC Drive Based on Adaline Filter. IEEE Trans. Ind. Electron. 2021, 68, 3728–3738. [Google Scholar] [CrossRef]
- Tang, Z.; Akin, B. A New LMS Algorithm Based Deadtime Compensation Method for PMSM FOC Drives. IEEE Trans. Ind. Appl. 2018, 54, 6472–6484. [Google Scholar] [CrossRef]
- Qasim, M.; Kanjiya, P.; Khadkikar, V. Optimal Current Harmonic Extractor Based on Unified ADALINEs for Shunt Active Power Filters. IEEE Trans. Power Electron. 2014, 29, 6383–6393. [Google Scholar] [CrossRef]
- Ni, K.; Gan, C.; Peng, G.; Shi, H.; Hu, Y.; Qu, R. Power Compensation-Oriented SVM-DPC Strategy for a Fault-Tolerant Back-to-Back Power Converter Based DFIM Shipboard Propulsion System. IEEE Trans. Ind. Electron. 2022, 69, 8716–8726. [Google Scholar] [CrossRef]
- Ni, K.; Gan, C.; Peng, G.; Hu, Y.; Qu, R. Impedance-Based Stability Analysis of Less Power Electronics Integrated Electric Shipboard Propulsion System Considering Operation Mode, PLL, and DC-Bus Voltage Control Effect. IEEE Trans. Veh. Technol. 2021, 70, 2219–2230. [Google Scholar] [CrossRef]
- Collins, E.R.; Huang, Y. A programmable dynamometer for testing rotating machinery using a three-phase induction machine. IEEE Trans. Energy Convers. 1994, 9, 521–527. [Google Scholar] [CrossRef]
- Wang, L.; Wang, M.; Guo, B.; Wang, Z.; Wang, D.; Li, Y. Analysis and Design of a Speed Controller for Electric Load Simulators. IEEE Trans. Ind. Electron. 2016, 63, 7413–7422. [Google Scholar] [CrossRef]
- Nam, Y. QFT force loop design for the aerodynamic load simulator. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1384–1392. [Google Scholar] [CrossRef]
- Kojabadi, H.M.; Chang, L.C.; Boutot, T. Development of a novel wind turbine simulator for wind energy conversion systems using an inverter-controlled induction motor. IEEE Trans. Energy Convers. 2004, 19, 547–552. [Google Scholar] [CrossRef]
- Li, H.; Steurer, M.; Shi, K.L.; Woodruff, S.; Zhang, D. Development of a unified design, test, and research platform for wind energy systems based on hardware-in-the-loop real-time simulation. IEEE Trans. Ind. Electron. 2006, 53, 1144–1151. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, H.; Liu, Y.; Zhang, Q.; Zhu, P.; Iqbal, R. An Improved Sensorless Control Strategy of Ship IPMSM at Full Speed Range. IEEE Access 2019, 7, 178652–178661. [Google Scholar] [CrossRef]
- Aidi, S.; Hui, H.; Wei, K. Marine AC high-capacity drive experiment system. In Proceedings of the 2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering, Changchun, China, 24–26 August 2010; pp. 33–36. [Google Scholar]
- Huang, H.; Shen, A.-D.; Chu, J.-X. Research on propeller dynamic load simulation system of electric propulsion ship. China Ocean Eng. 2013, 27, 255–263. [Google Scholar] [CrossRef]
- Zheng, D.; Xu, H. Modeling and high accuracy parameter estimates for a friction based electro-hydraulic load simulator. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 2392–2397. [Google Scholar]
- Fossen, T.I.; Blanke, M. Nonlinear output feedback control of underwater vehicle propellers using feedback form estimated axial flow velocity. IEEE J. Ocean. Eng. 2000, 25, 241–255. [Google Scholar] [CrossRef]
- GB/T 35701-2017; Marine Converter of Electric Propulsion. Chinese National Standard: Beijing, China, 2017; pp. 1–13.
- Sivaraman, S.; Awanish, D.; Suresh, R. On the performance of different Deep Reinforcement Learning based controllers for the path-following of a ship. Ocean Eng. 2023, 286, 115607. [Google Scholar] [CrossRef]
- Yang, G.; Xiao, F.; Fan, X.; Wang, R.; Liu, J. Three-Phase Three-Level Phase-Shifted PWM DC–DC Converter for Electric Ship MVDC Application. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 162–170. [Google Scholar] [CrossRef]
- Dufour, C.; Dumur, G.; Paquin, J.N.; Belanger, J. A PC-based hardware-in-the-loop simulator for the integration testing of modern train and ship propulsion systems. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 444–449. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Motor Operating Conditions | Error Compensated | Dependence on Motor Parameters | Highly Dynamic (✓Yes/×No) | Speed/Torque Improved (✓Yes/×No) | Phase Current Distortion Improved |
|---|---|---|---|---|---|---|
| In [7] | Low–high speed | Offset | Dependent | ✓ | ✓ | Medium |
| In [8] | Low speed | Offset and scaling | Dependent | - | ✓ | - |
| In [9] | Low speed | Offset and scaling | Dependent | - | ✓ | - |
| In [15,17] | Low speed | Offset and scaling | Independent | ✓ | ✓ | Low |
| In [18,20] | Low speed | Offset and scaling | Independent | ✓ | ✓ | Low |
| In [21,22] | Low speed | Offset and scaling | Independent | ✓ | ✓ | Low |
| In [23] | Low–high speed | Offset | Independent | ✓ | ✓ | - |
| In [24] | Low speed | Scaling | Independent | × | - | Medium |
| In [25] | Low speed | Offset and scaling | Independent | - | ✓ | - |
| In [26] | Low–high speed | Offset and scaling | Dependent | × | ✓ | - |
| In [36] | Steady state | Offset and scaling | Independent | × | ✓ | High |
| Proposed Method | Low–high speed | Offset and scaling | Independent | ✓ | ✓ | High |
| Harmonic Content | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| SOGI | SOGI2 | SOGIs | SOGI | SOGI2 | SOGIs | SOGI | SOGI2 | SOGIs | |
| 30 Hz | 10 | 10 | 10 | 6.86 | 5.74 | 0 | 2.89 | 0.75 | 0 |
| 60 Hz | 5.49 | 3.76 | 0 | 8 | 8 | 8 | 4.75 | 1.77 | 0 |
| 180 Hz | 1.18 | 0.28 | 0 | 2.34 | 1.06 | 0 | 5 | 5 | 5 |
| Parameters | Value |
|---|---|
| Pole pairs | 5 |
| Stator resistance (Ω) | 1.616 |
| d-axis stator inductance (mH) | 11.47 |
| q-axis stator inductance (mH) | 11.47 |
| Flux linkage (Wb) | 0.231 |
| Rated current (A) | 5 |
| Supply voltage (V) | 300 |
| Moment of inertia (kg·m2) | 0.00235 |
| Rated power (W) | 1000 |
| Rated torque (N·m) | 9.55 |
| Rated speed (rpm) | 1000 |
| Harmonic Content | A-Phase (A) | B-Phase (A) | Speed (rpm) | Torque (N·m) | |
|---|---|---|---|---|---|
| Before compensation | dc | 0.0799 | 0.0836 | 449.91 | 2.7828 |
| 1st | 1.7475 | 1.5987 | 1.2106 | 0.3035 | |
| 2nd | 0.0089 | 0.0047 | 0.9895 | 0.3171 | |
| THD | 4.81% | 3.68% | 0.44% | 16.12% | |
| After compensation | dc | 0.0064 | 0.0076 | 449.92 | 2.7750 |
| 1st | 1.7250 | 1.7580 | 0.1676 | 0.1341 | |
| 2nd | 0.0038 | 0.0018 | 0.1338 | 0.0634 | |
| THD | 1.89% | 1.72% | 0.18% | 5.63% |
| Parameters | Value |
|---|---|
| Hull mass Ms/kg | 14 |
| Mass of the attached water Δm/kg | 1 |
| Propeller diameter D/m | 0.15 |
| Thrust deduction coefficient t | 0.08 |
| Wake coefficient w | 0.15 |
| Harmonic Content | Torque (N·m) | Speed (rpm) | |
|---|---|---|---|
| Before compensation | dc | 1.4311 | 199.9 |
| 1st | 0.3063 | 5.42 | |
| 2nd | 0.1622 | 1.12 | |
| THD | 24.13% | 2.78% | |
| After compensation | dc | 1.4410 | 199.9 |
| 1st | 0.0947 | 1.02 | |
| 2nd | 0.0330 | 0.28 | |
| THD | 6.78% | 0.54% |
| Harmonic Content | Phase Current A (%) | Phase Current B (%) | |
|---|---|---|---|
| Before compensation | dc | 10.1 | 10.7 |
| 2nd | 3.5 | 3.6 | |
| 3rd | 1.3 | 2.3 | |
| After compensation | dc | 1.1 | 2.3 |
| 2nd | 0.1 | 0.3 | |
| 3rd | 0.3 | 0.4 |
| Parameters | Value |
|---|---|
| Pole pairs | 12 |
| Stator resistance (Ω) | 0.011 |
| Stator inductor (H) | 3.074 × 10−5 |
| Flux (Wb) | 0.3051 |
| Moment of inertia (kg·m2) | 0.8051 |
| Rated power (kW) | 100 |
| Hull mass Ms/kg | 31,000 |
| Mass of the attached water Δm/kg | 2000 |
| Propeller diameter D/m | 0.9 |
| Thrust deduction coefficient t | 0.13 |
| Wake coefficient w | 0.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, H.; Xiang, T.; Liu, Y.; Zhang, Q.; Wei, Y.; Zhang, F. Compensation Method for Current Measurement Errors in the Synchronous Reference Frame of a Small-Sized Surface Vehicle Propulsion Motor. J. Mar. Sci. Eng. 2024, 12, 154. https://doi.org/10.3390/jmse12010154
Guo H, Xiang T, Liu Y, Zhang Q, Wei Y, Zhang F. Compensation Method for Current Measurement Errors in the Synchronous Reference Frame of a Small-Sized Surface Vehicle Propulsion Motor. Journal of Marine Science and Engineering. 2024; 12(1):154. https://doi.org/10.3390/jmse12010154
Chicago/Turabian StyleGuo, Haohao, Tianxiang Xiang, Yancheng Liu, Qiaofen Zhang, Yi Wei, and Fengkui Zhang. 2024. "Compensation Method for Current Measurement Errors in the Synchronous Reference Frame of a Small-Sized Surface Vehicle Propulsion Motor" Journal of Marine Science and Engineering 12, no. 1: 154. https://doi.org/10.3390/jmse12010154
APA StyleGuo, H., Xiang, T., Liu, Y., Zhang, Q., Wei, Y., & Zhang, F. (2024). Compensation Method for Current Measurement Errors in the Synchronous Reference Frame of a Small-Sized Surface Vehicle Propulsion Motor. Journal of Marine Science and Engineering, 12(1), 154. https://doi.org/10.3390/jmse12010154