
Design Methodology of Wind Turbine Rotor Models Based on Aerodynamic Thrust and Torque Equivalence





Abstract
:1. Introduction
2. Scaling Methodology
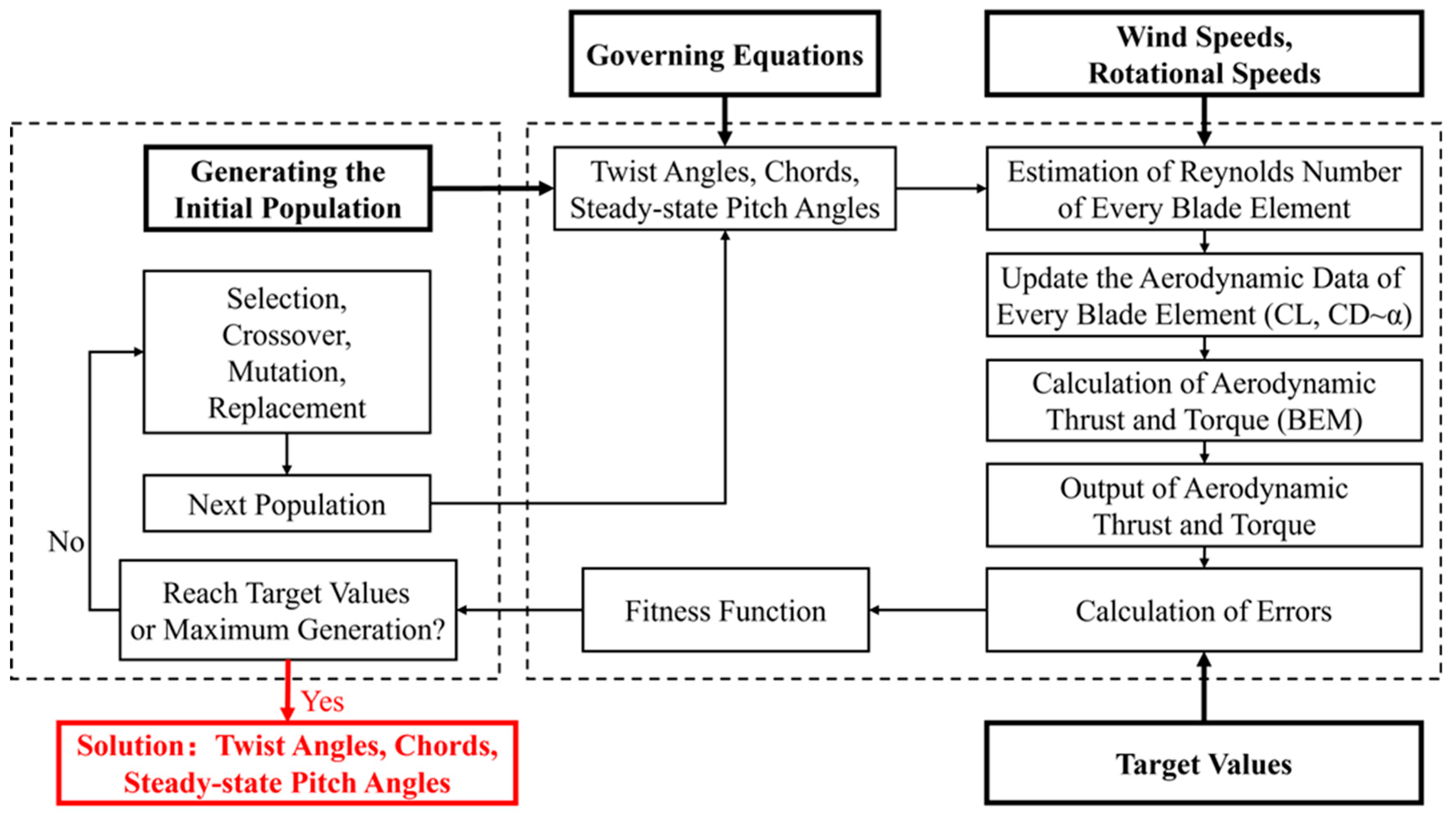
3. Design Methodology
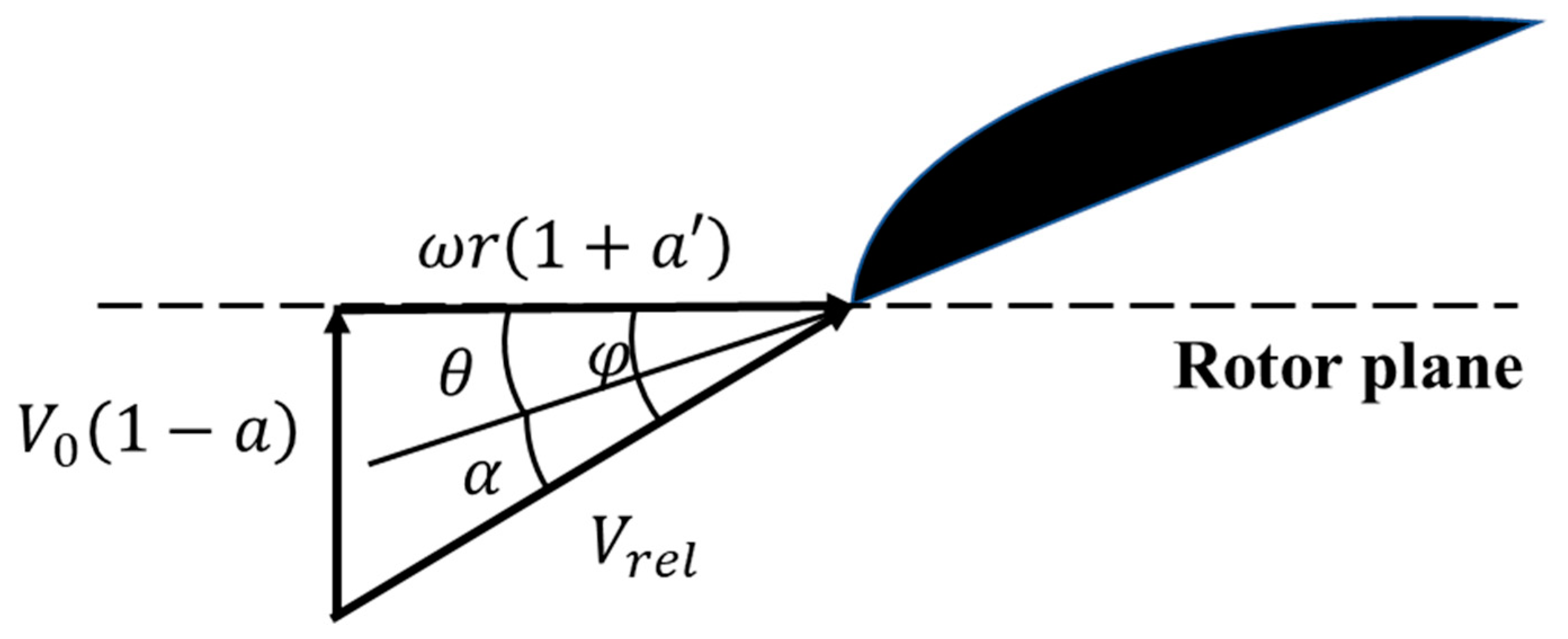
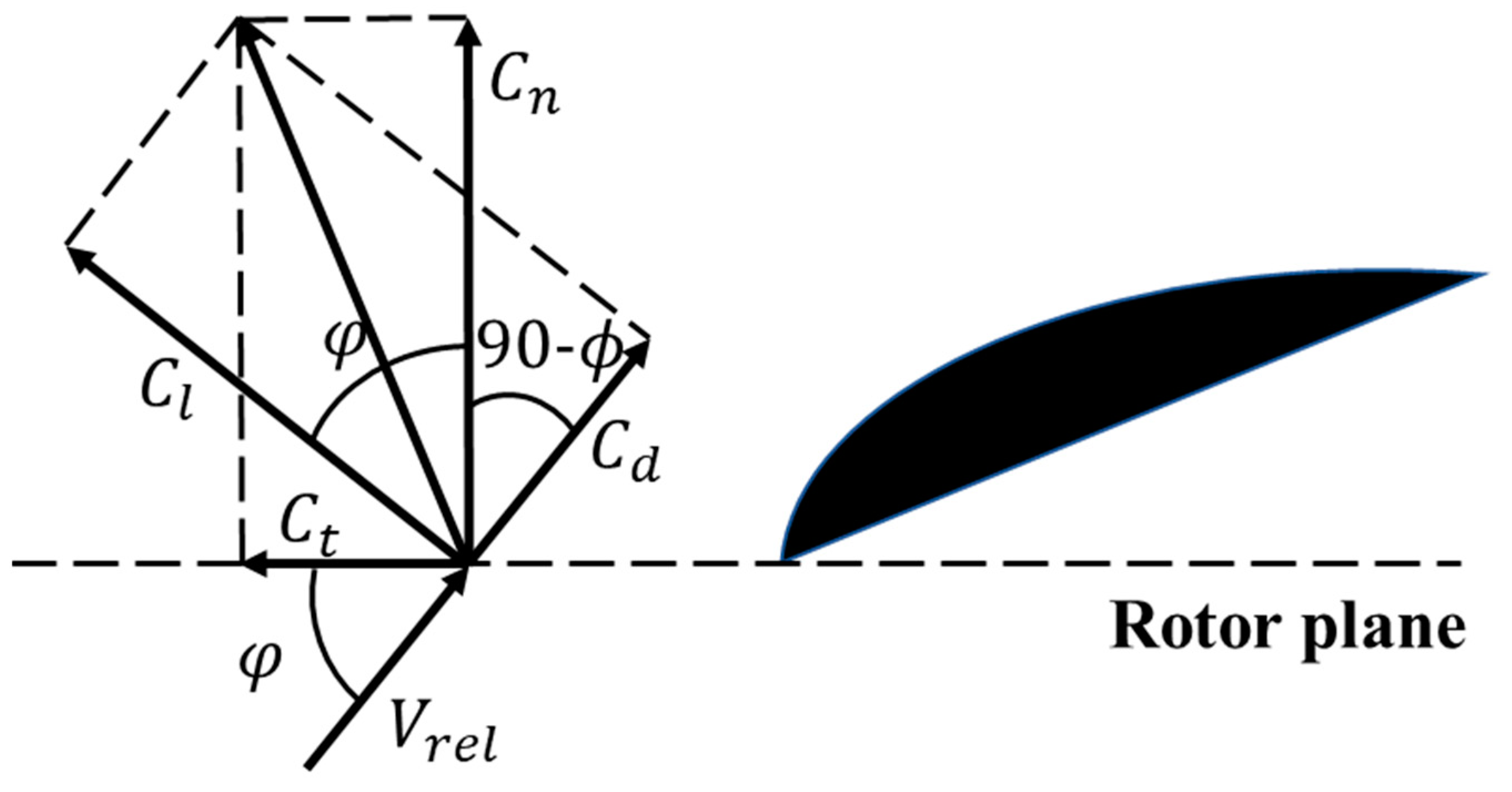
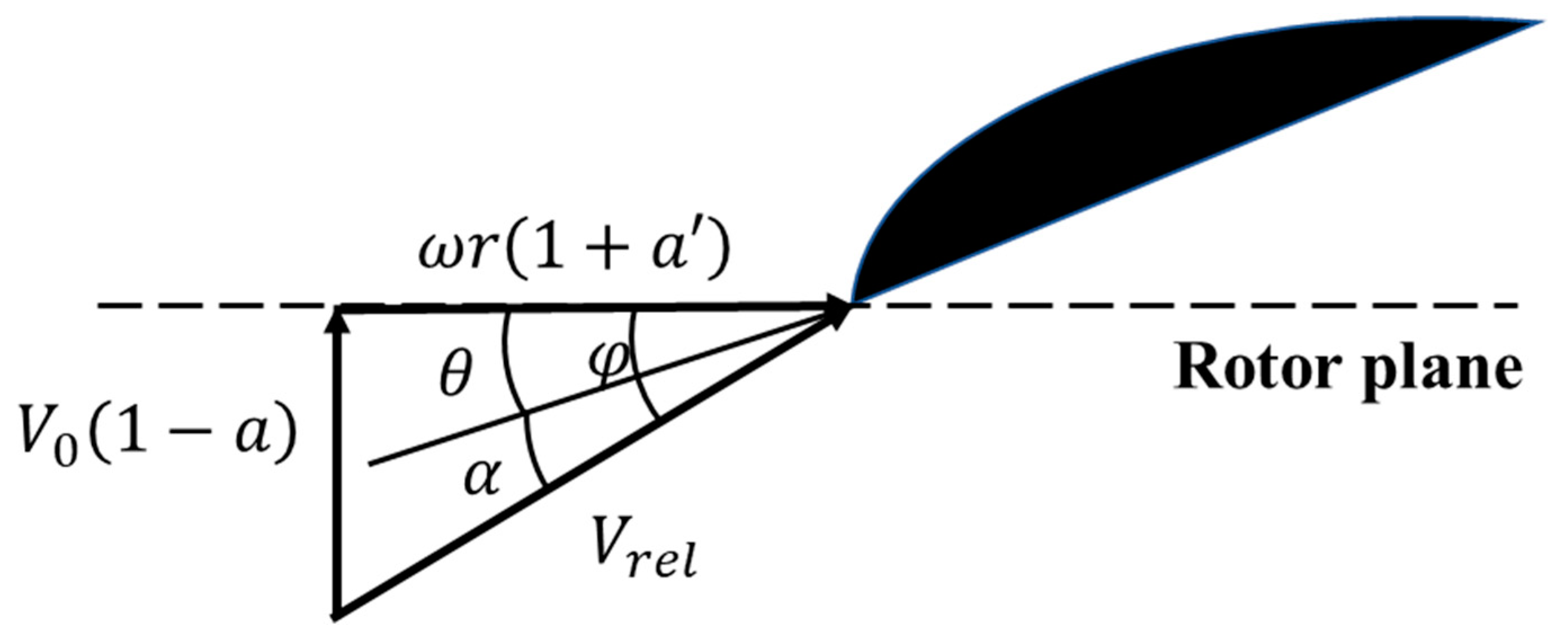
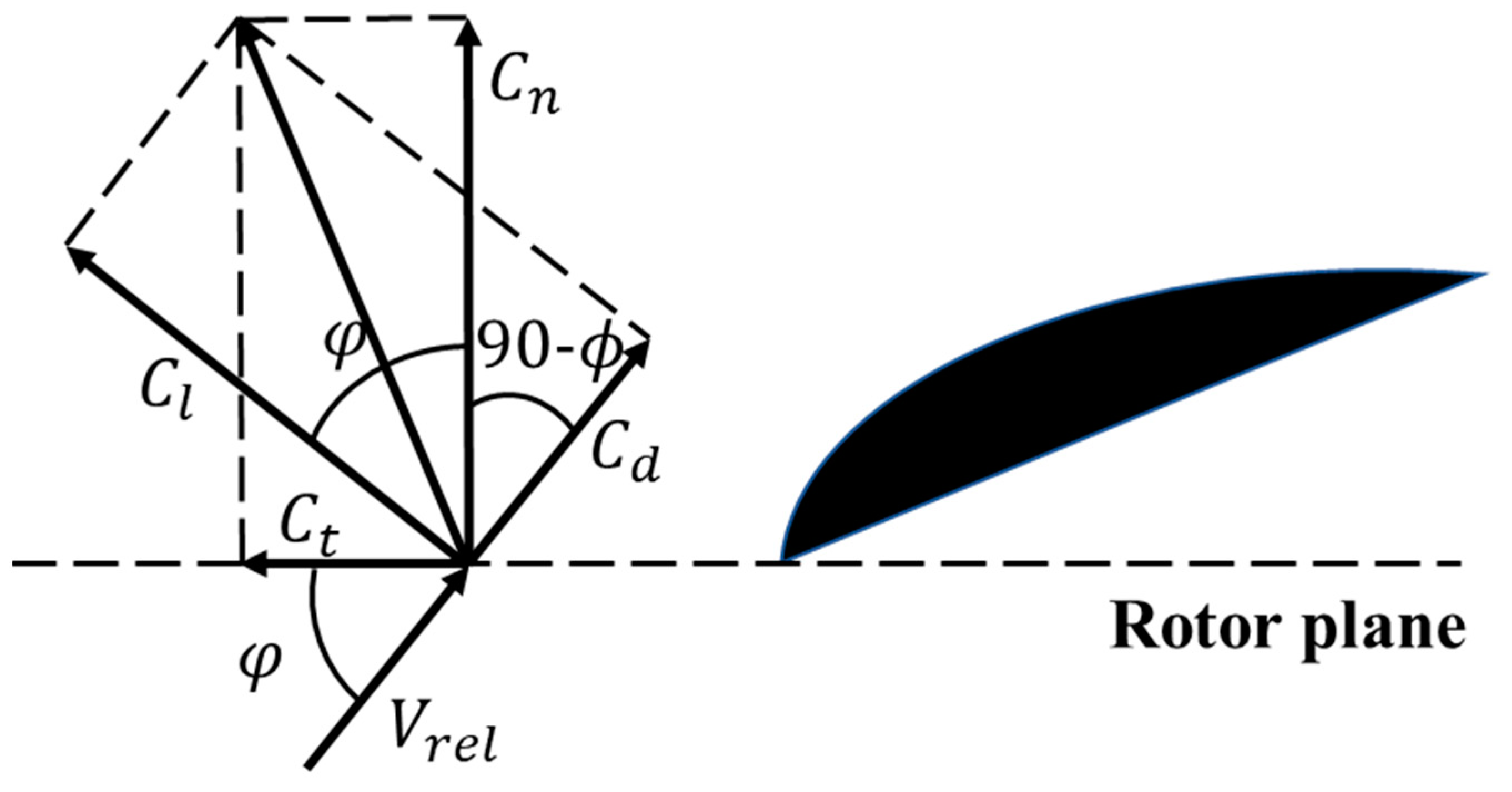
3.1. Aerodynamic Calculation
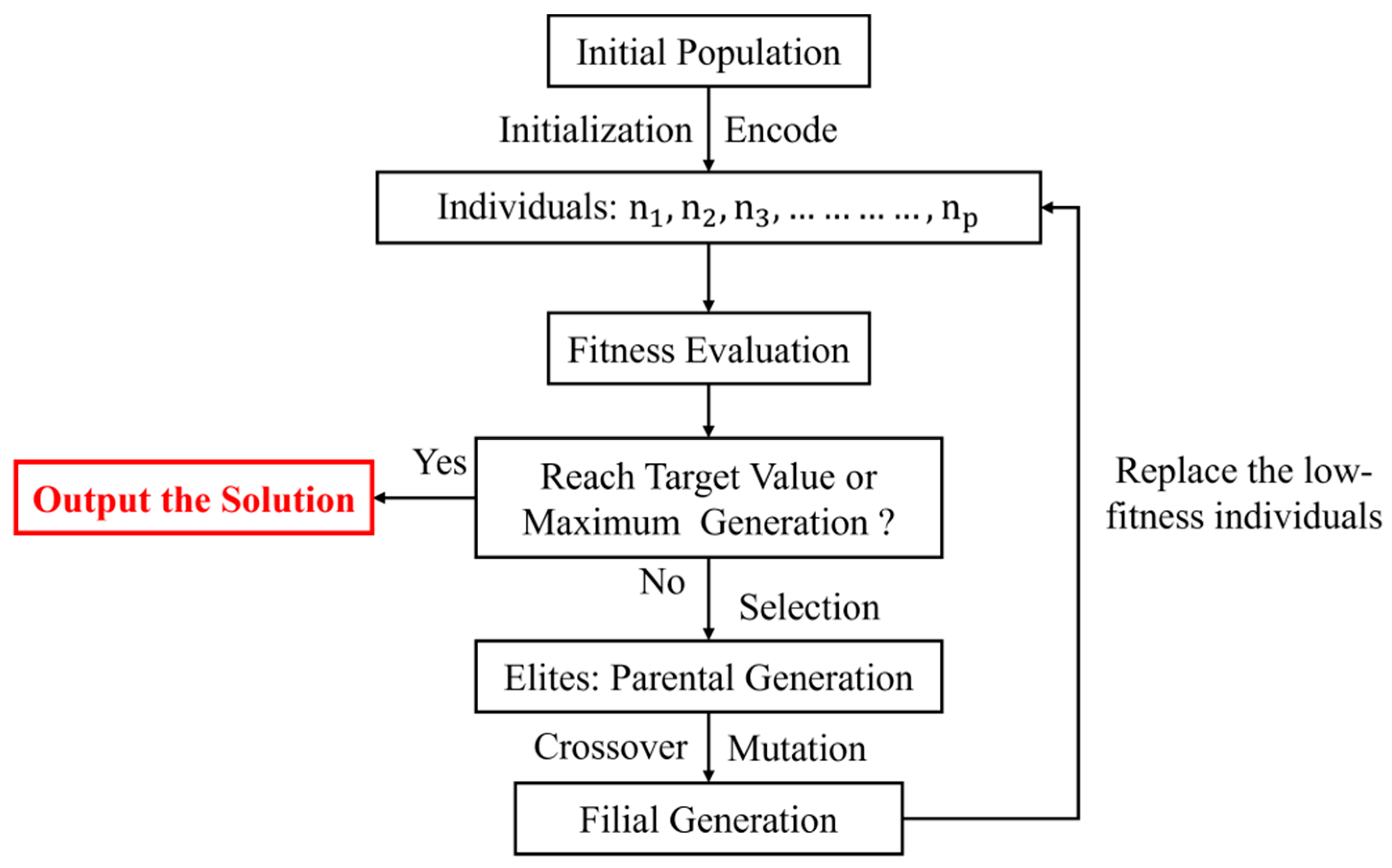
3.2. Genetic Algorithm
3.3. Design Variables and Fitness Functions
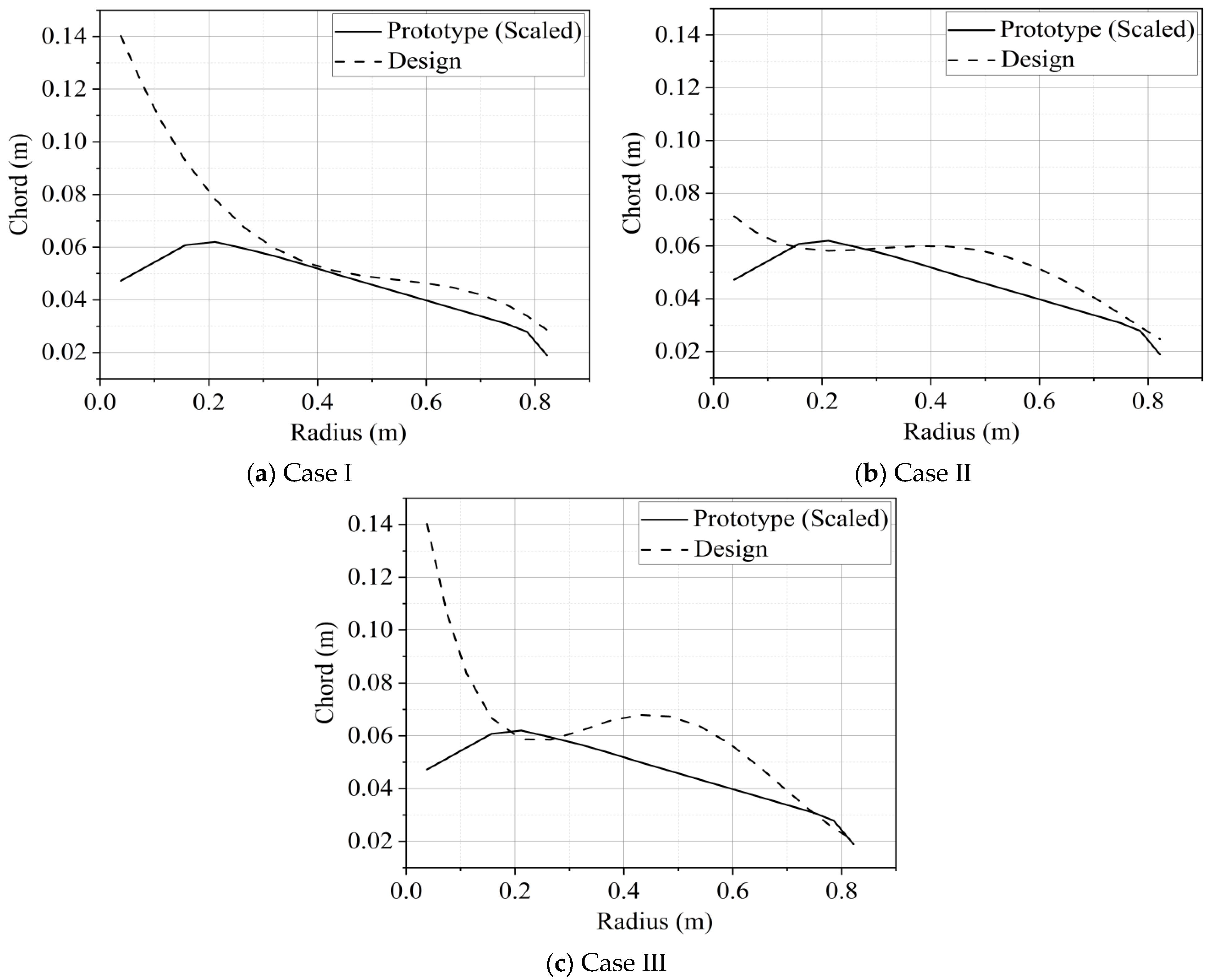
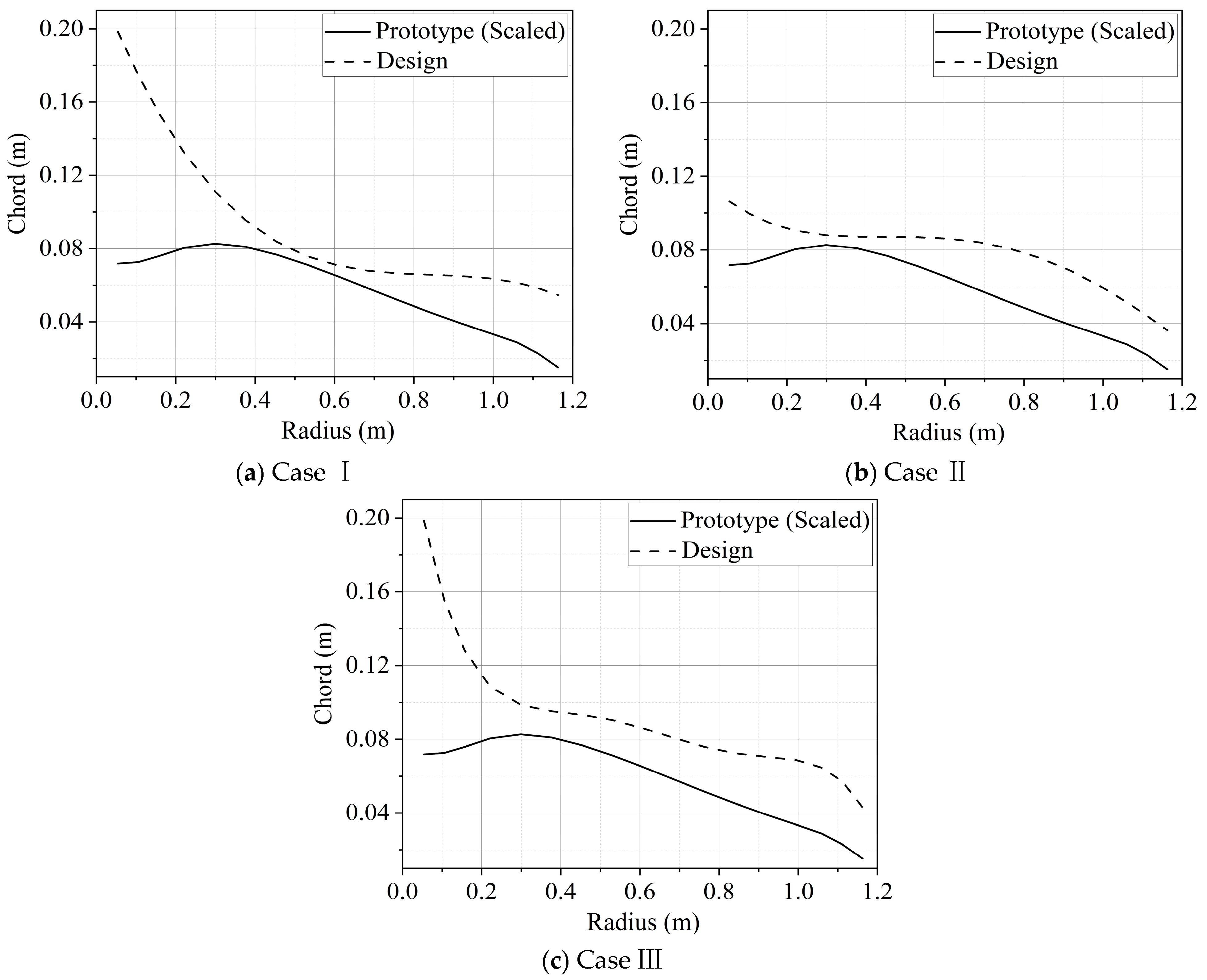
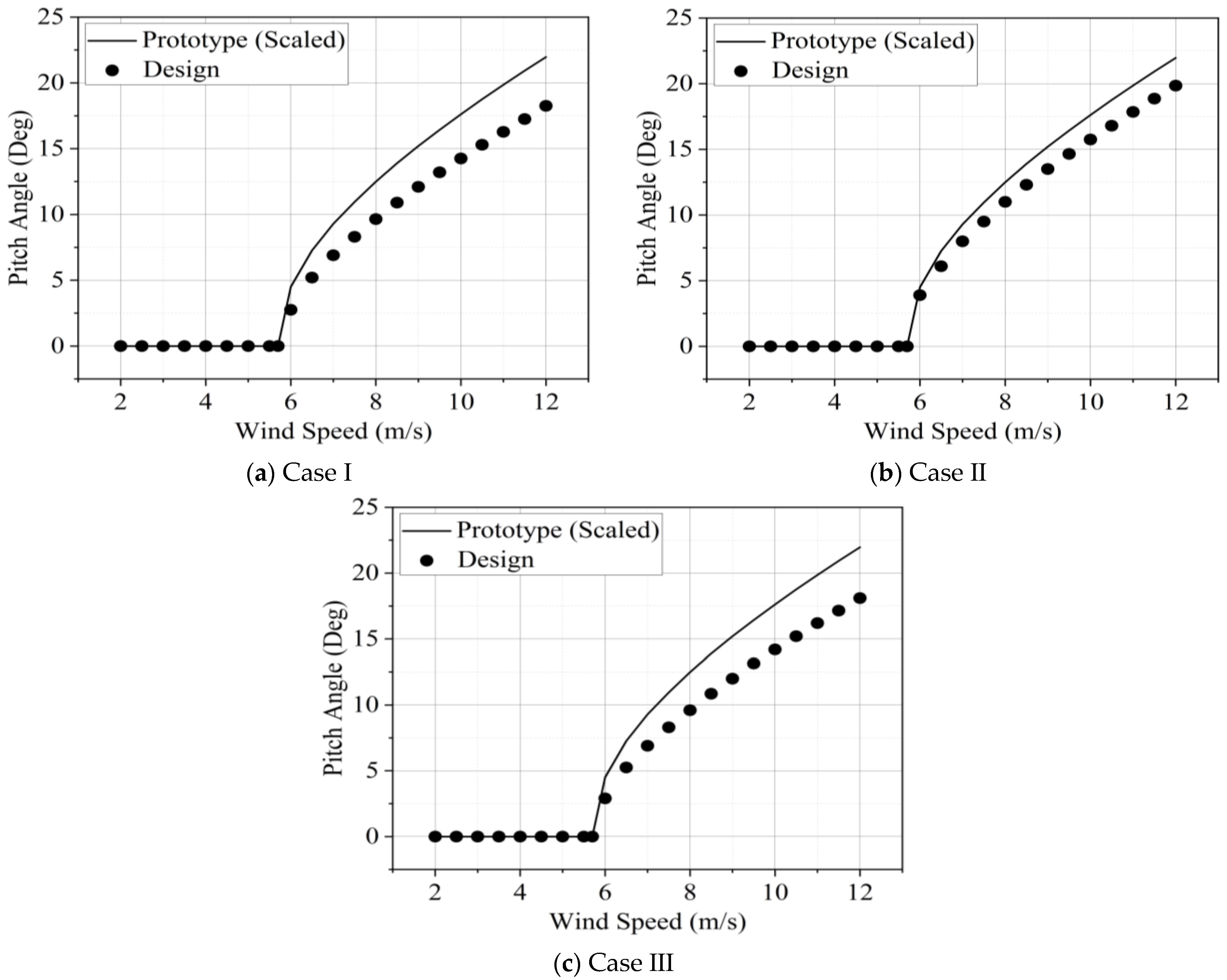
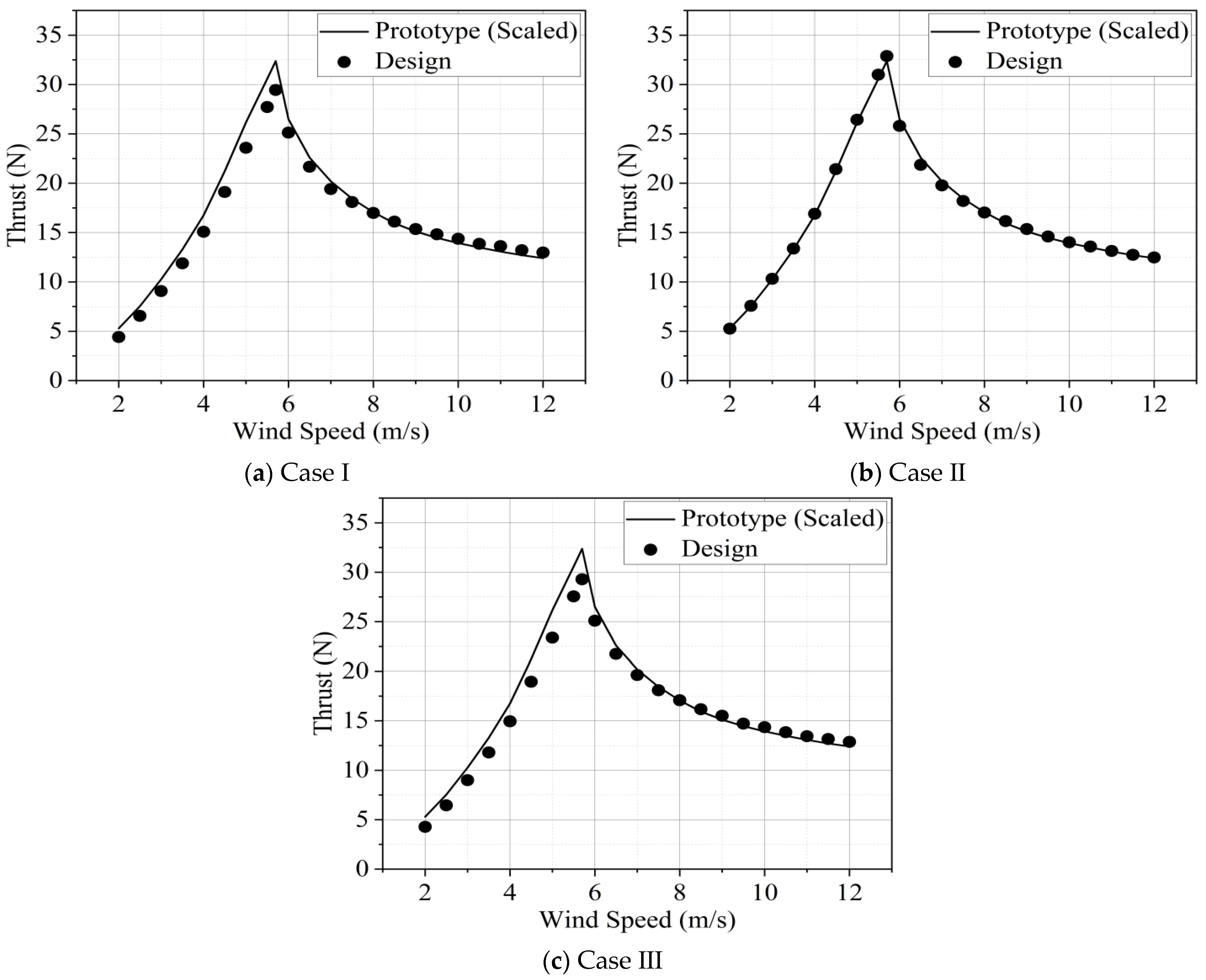
4. Validation of the Aerodynamic Design
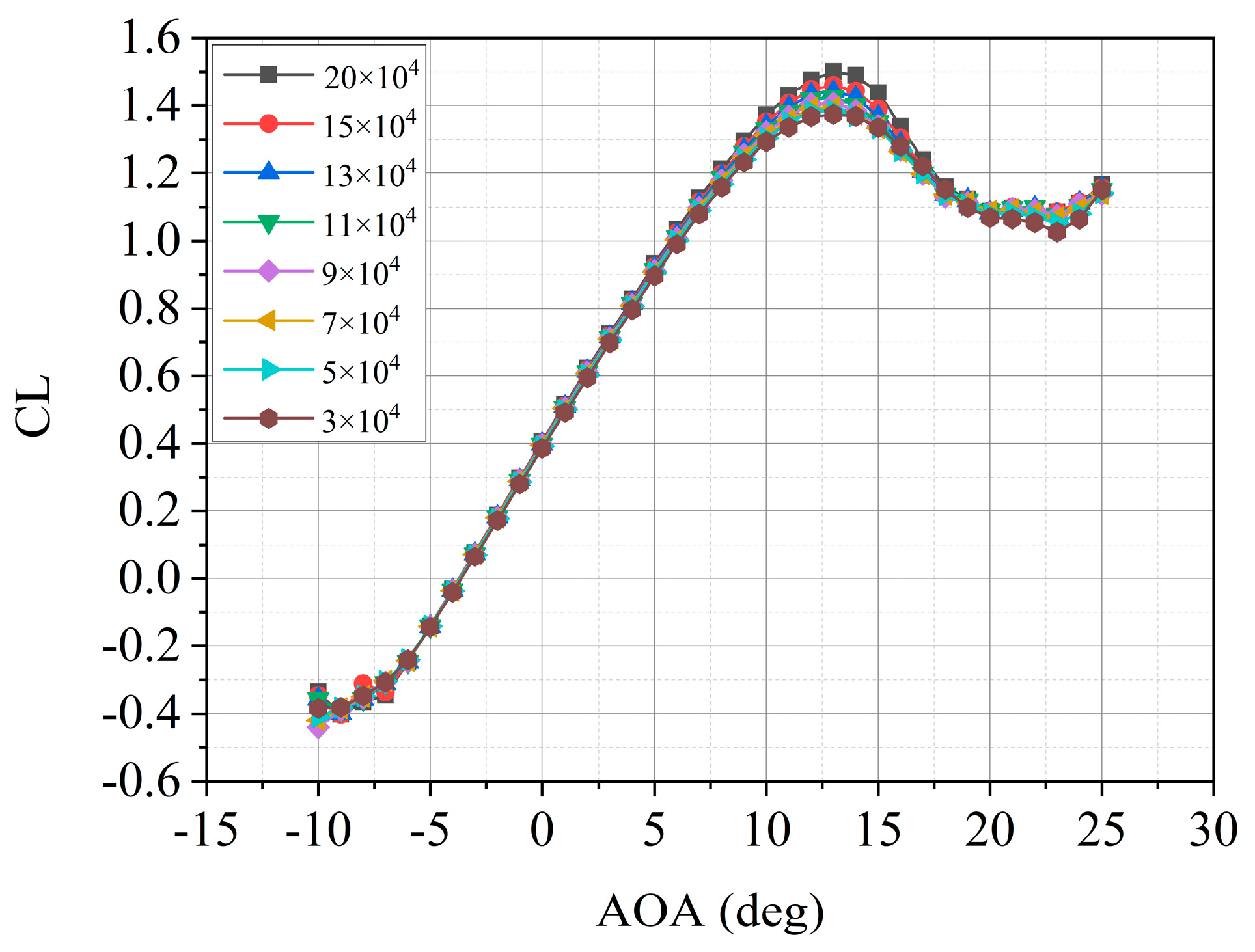
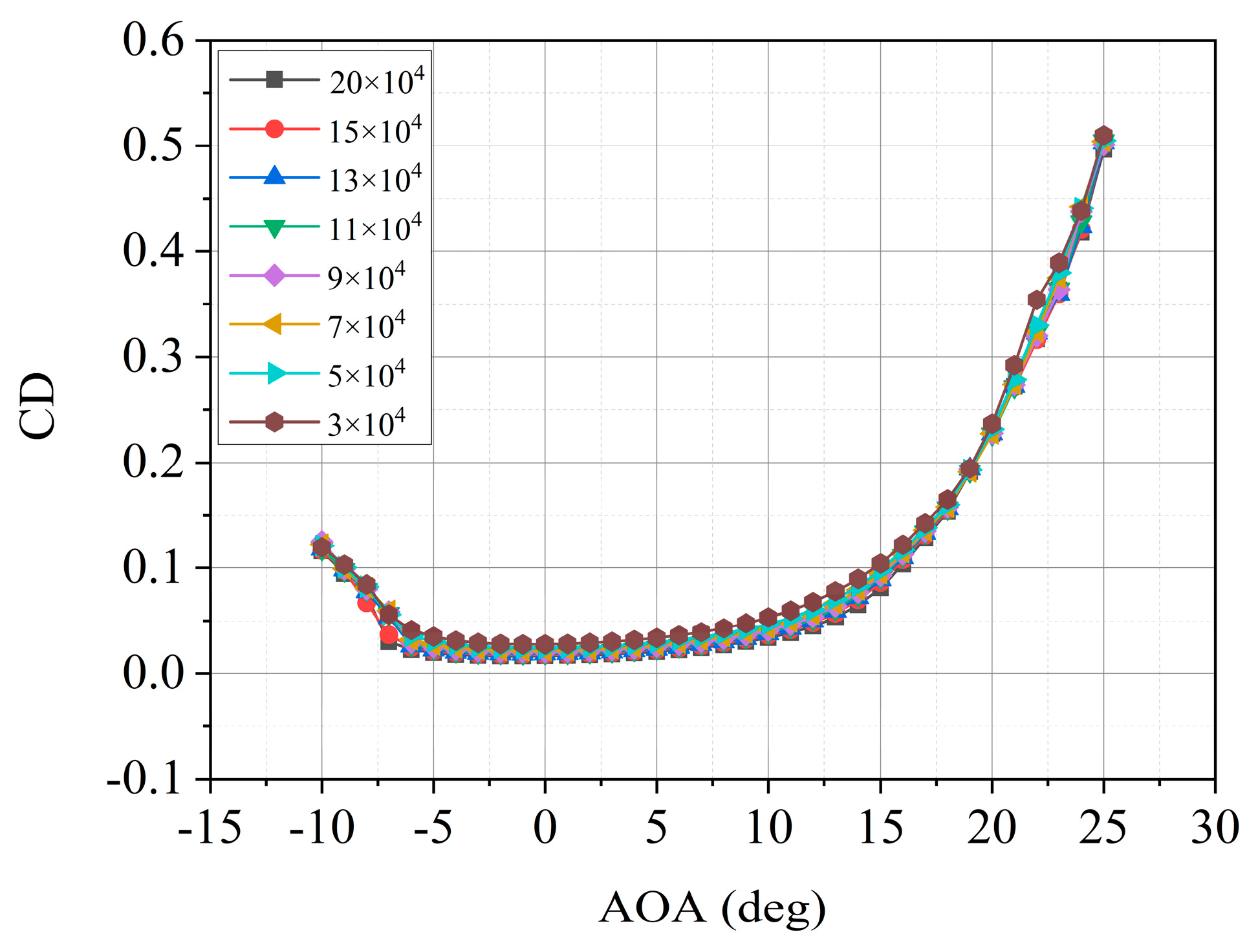
4.1. Selection of Airfoil
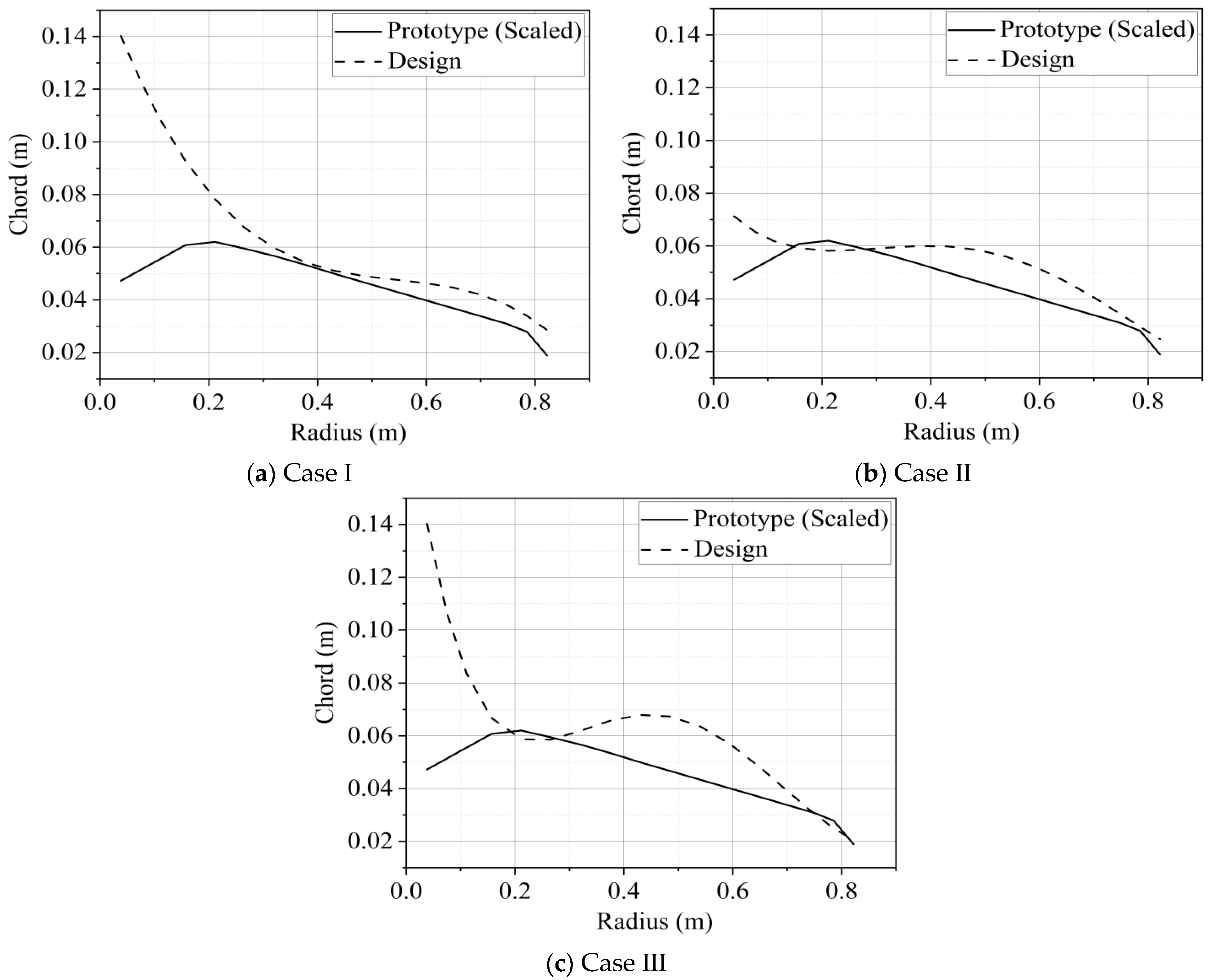
4.2. Output of Aerodynamic Design
4.3. Comparison of Aerodynamic Performance
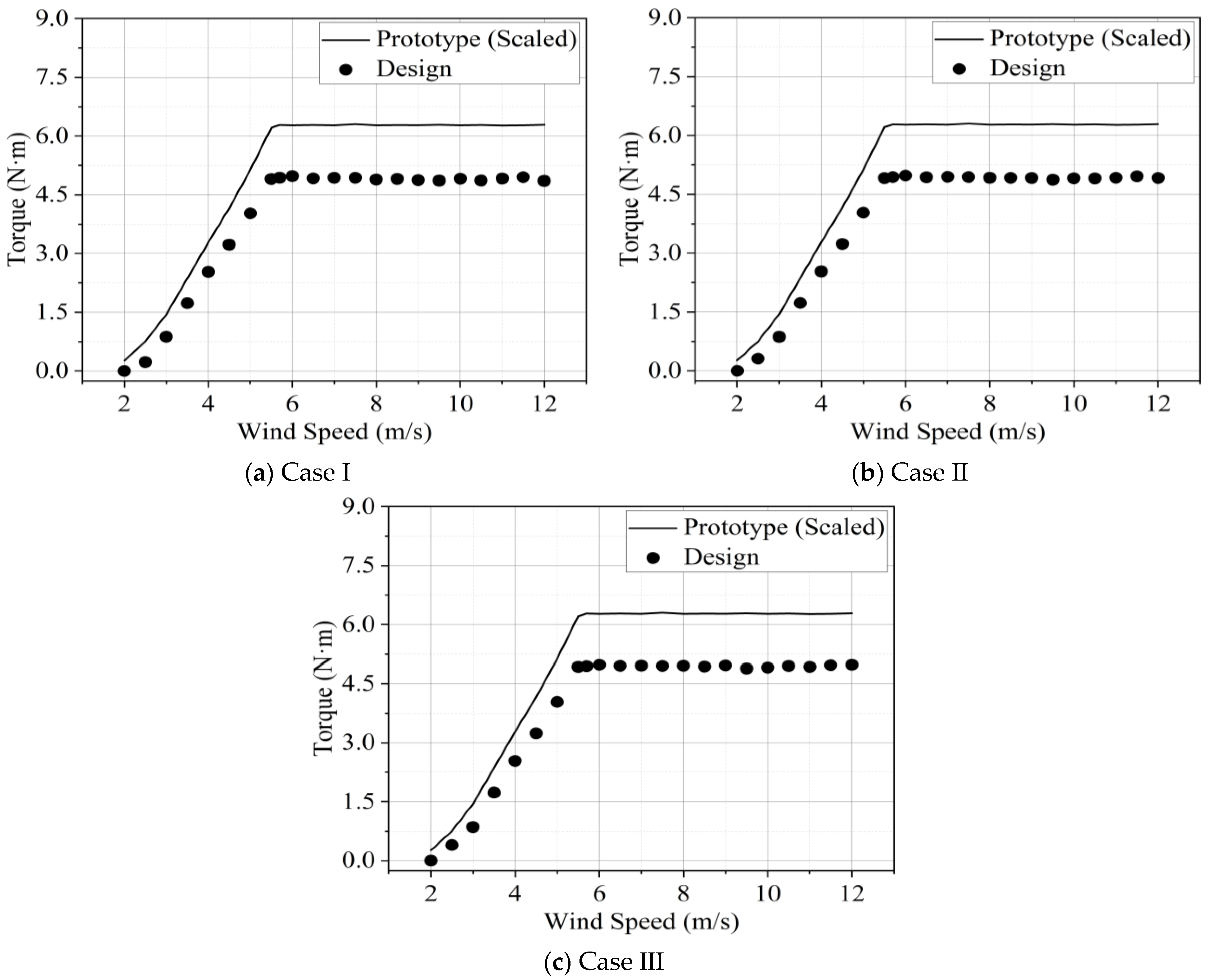
4.4. Comparison of Fitness Functions
5. Conclusions
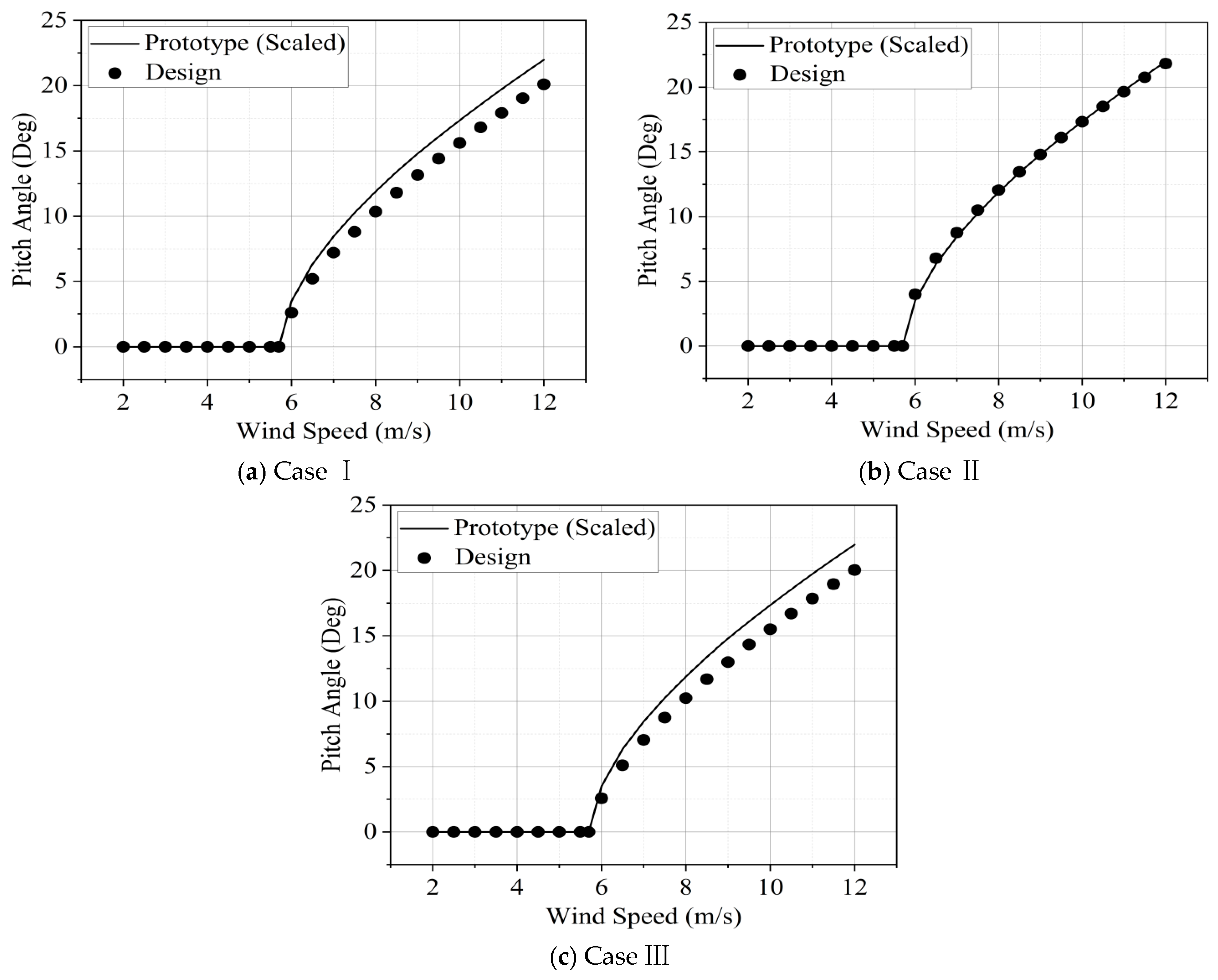
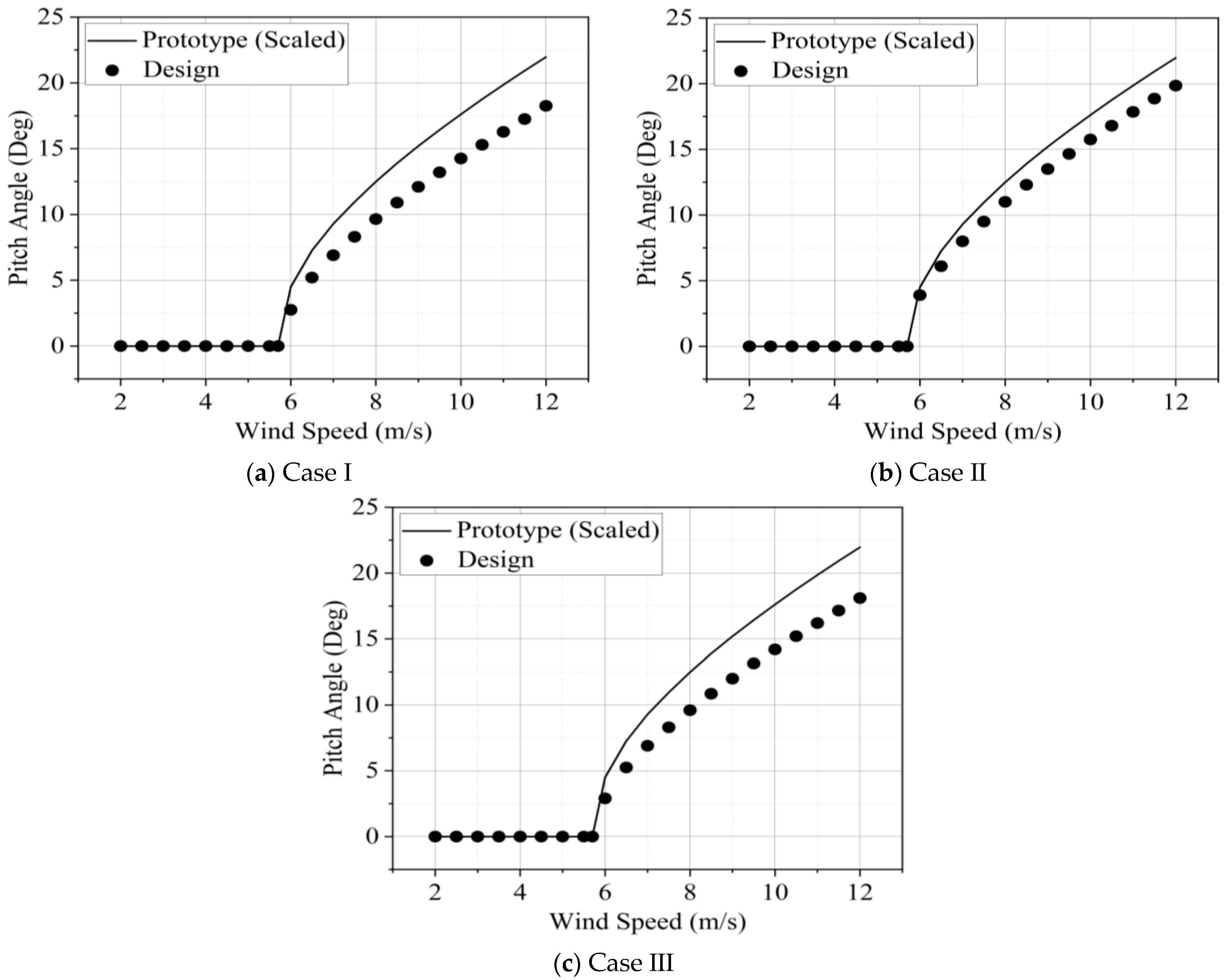
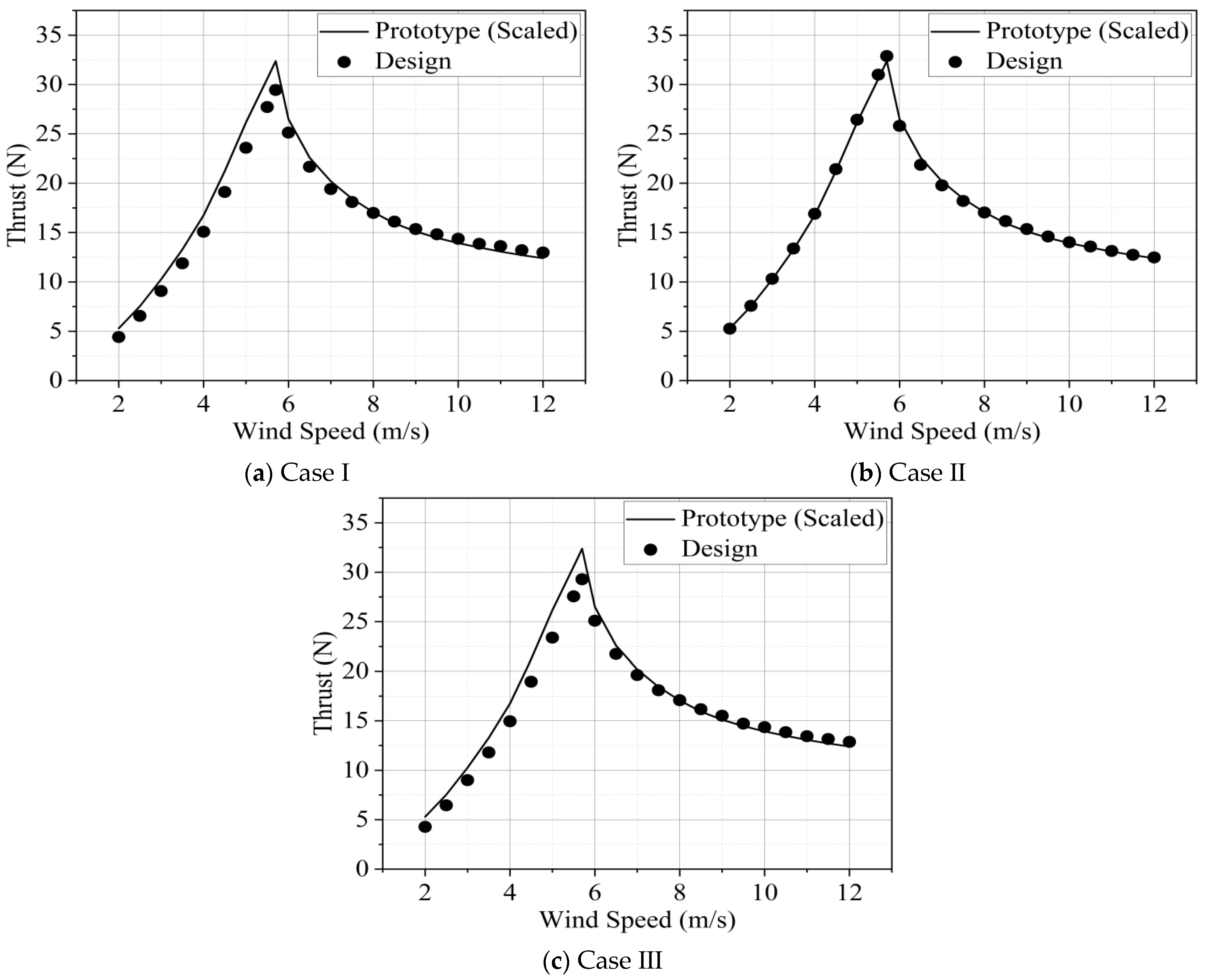
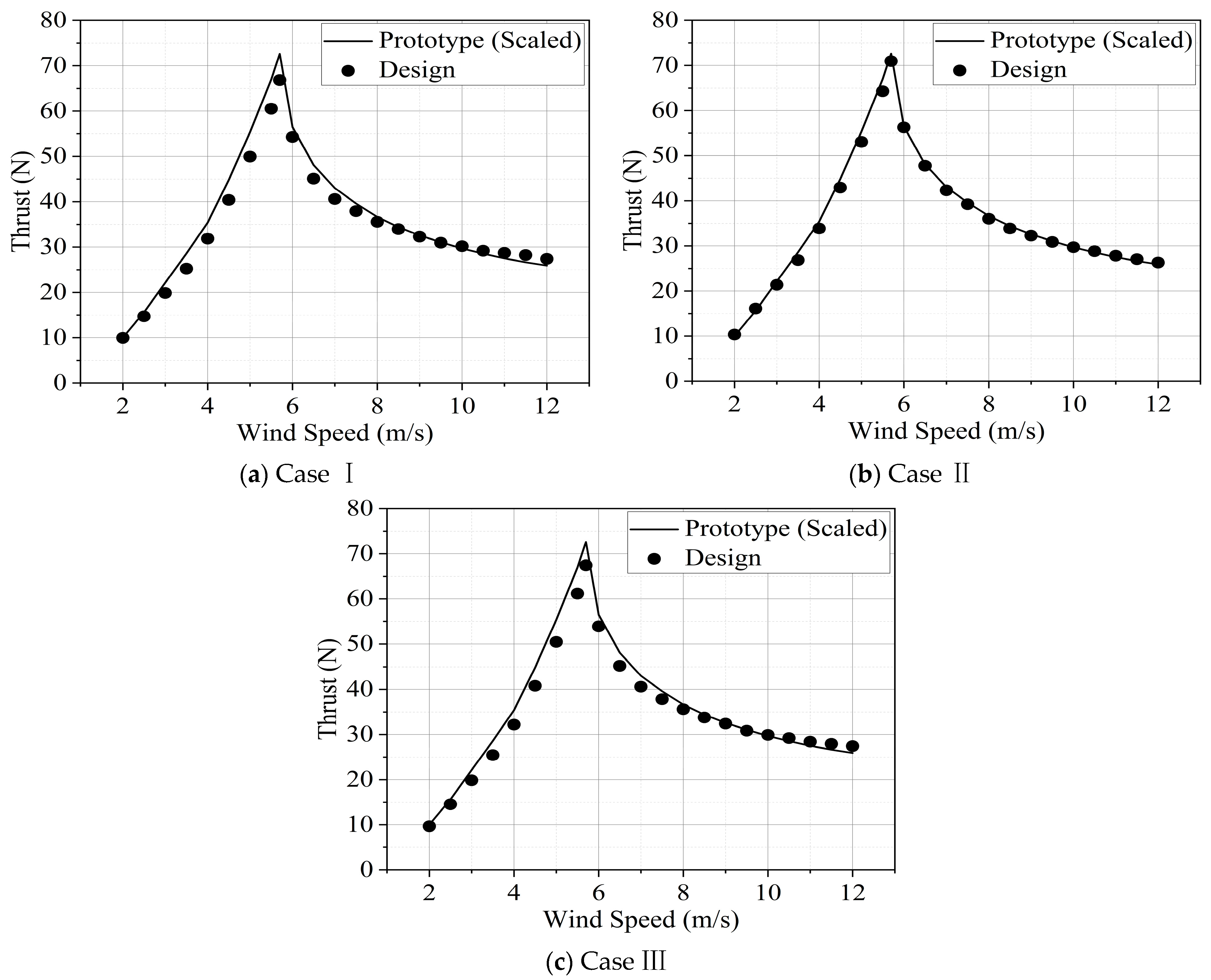
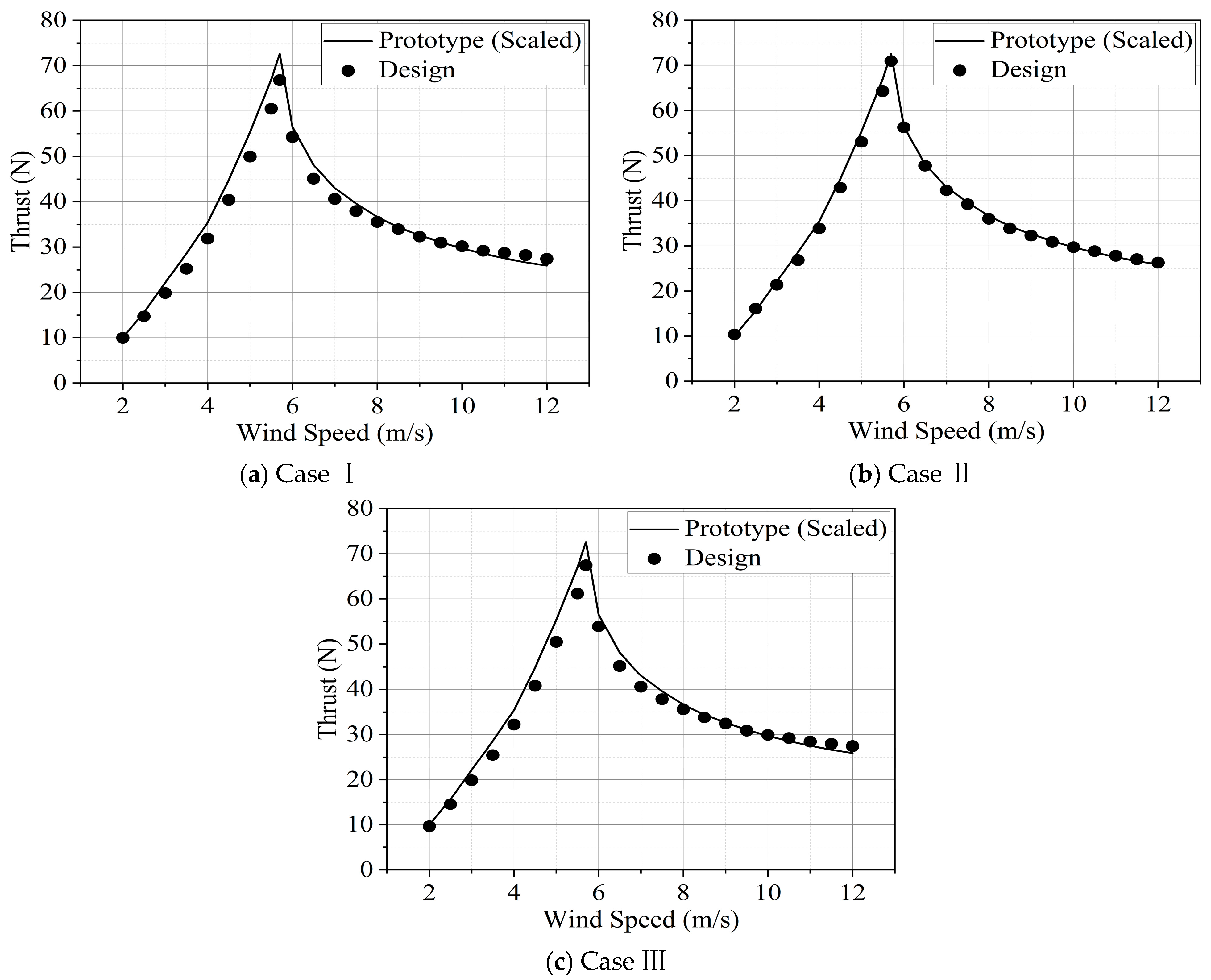
- Based on the case studies of NREL 5 MW and DTU 10 MW, the model-scale aerodynamic thrust performance matches with the prototype accurately in the entire region between the cut-in and cut-out wind speeds, which allows the rotor model to provide a correct thrust at variant wind speeds. The maximum errors of the thrust between the model and the prototype are below 5%.
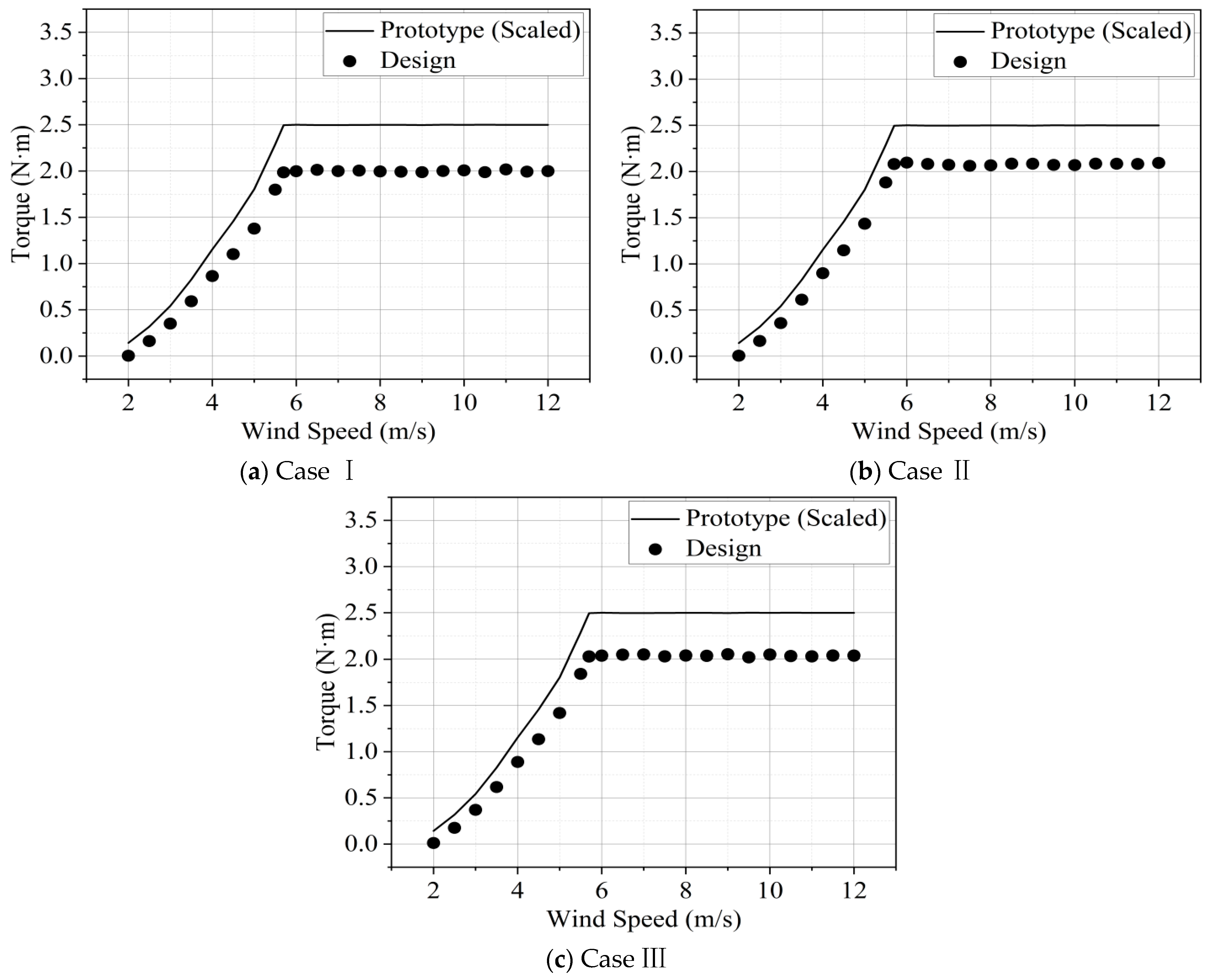
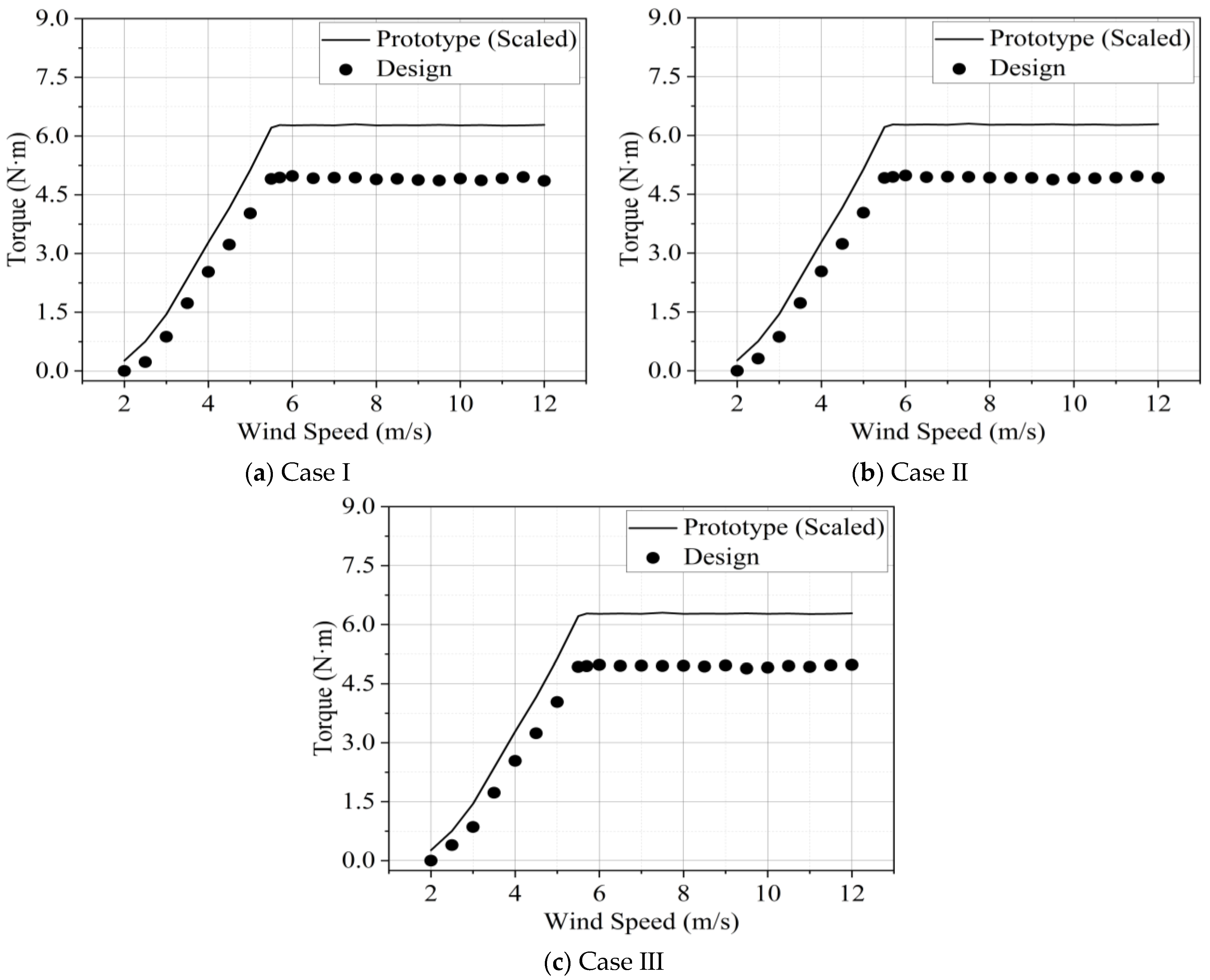
- Based on the case studies of NREL 5 MW and DTU 10 MW, the variance of the aerodynamic torque with the wind speeds reaches good agreement between the model and the prototype, which allows the redesigned active pitch control strategy to use the same logic as the prototype.
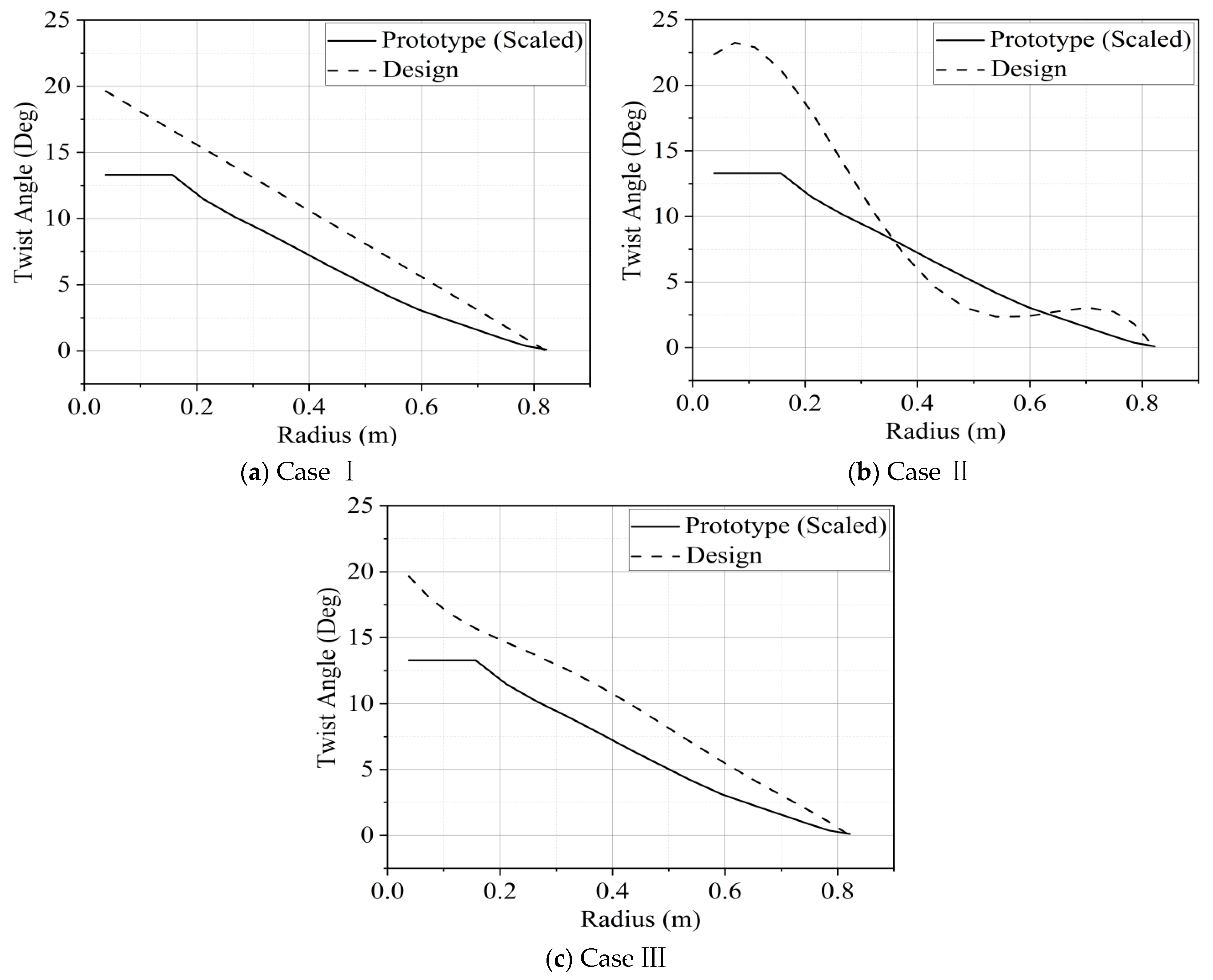
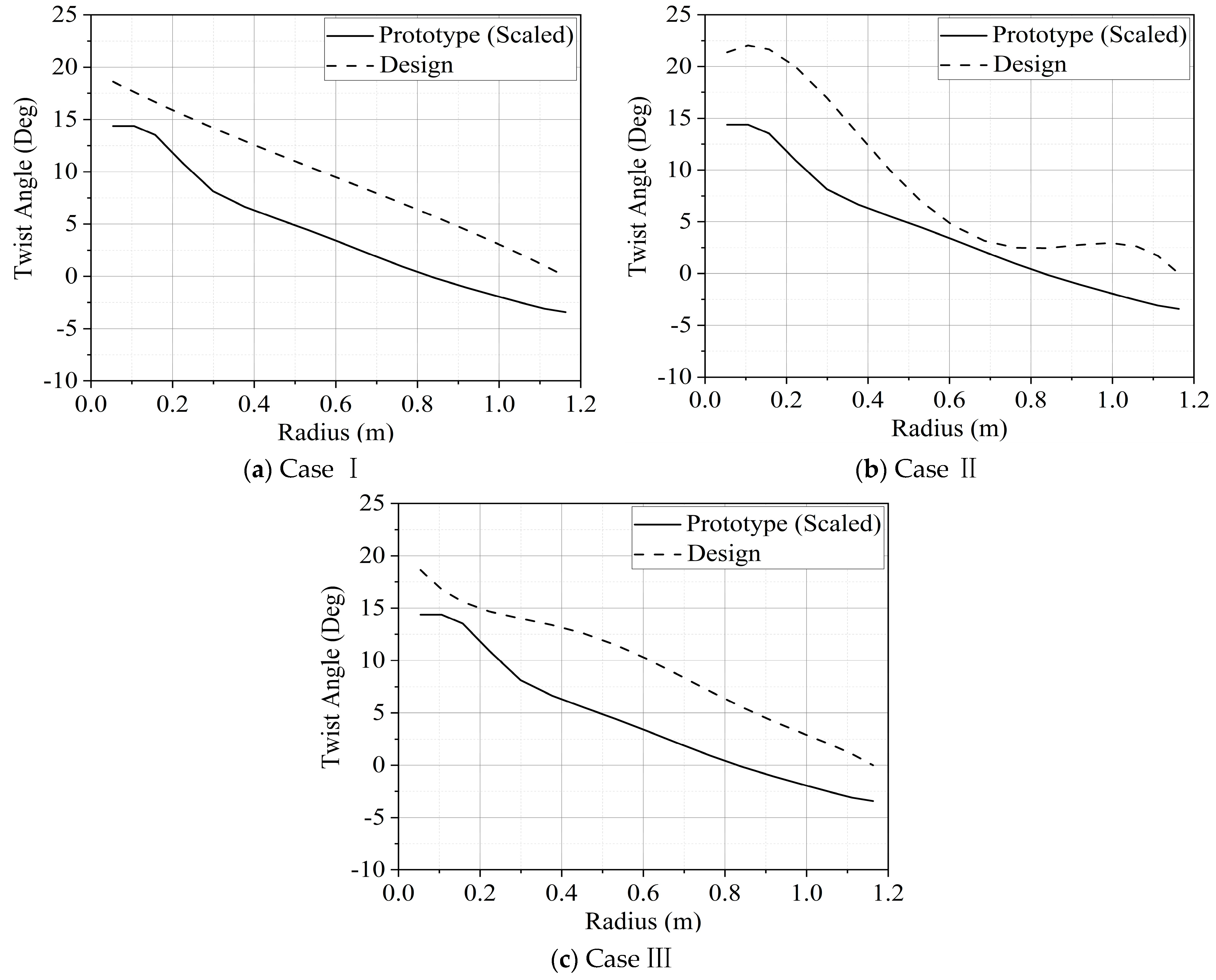
- Based on the case studies of NREL 5 MW and DTU 10 MW, the degree of interpolation polynomials used for the governing equations of the design variable has significant influences on the accuracy and convergence of the design iteration. The quartic interpolation polynomials could achieve satisfying results for the design, compared to the cubic and quintic cases.
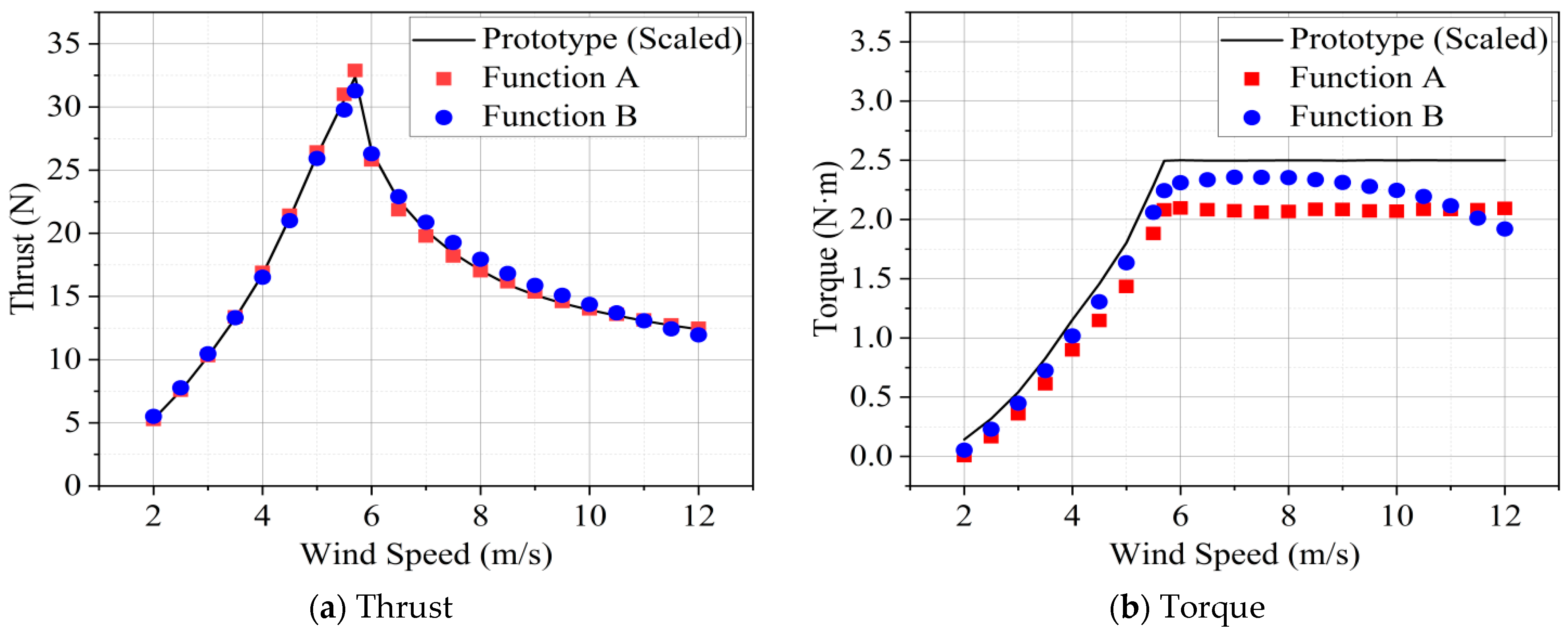
- Based on the case studies of NREL 5 MW with quartic interpolation polynomials, the fitness Function A achieves better results than Function B and the maximum errors of thrust are respectively 3.28% and 5.56%, which indicates that function A is more suitable for the aerodynamic design of the rotor model. The requirement of the matched torque values is too strict to be reached and the accuracy of the thrust performance will be reduced.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Musial, W.; Spitsen, P.; Beiter, P.; Duffy, P.; Marquis, M.; Cooperman, A.; Hammond, R.; Shields, M. Offshore Wind Market Report: 2022 Edition; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2022.
- Ma, Y.; Chen, C.; Fan, T.; Yan, X.; Lu, H. Research on motion inhibition method using an innovative type of mooring system for spar floating offshore wind turbine. Ocean Eng. 2021, 223, 108644. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, C.; Fan, T.; Lu, H. Research on the dynamic behaviors of a spar floating offshore wind turbine with an innovative type of mooring system. Front. Energy Res. 2022, 10, 853448. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, C.; Yan, X.; Shen, Y.; Fan, T. Analysis on Hydrodynamic Responses of a Spar Offshore Wind Turbine with an Innovative Type of Mooring System. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine. Ph.D. Thesis, University of Colorado at Boulder, Boulder, CO, USA, 2007. [Google Scholar]
- Jonkman, B.; Jonkman, J. FAST v8. 16.00; National Renewable Energy Laboratory: Golden, CO, USA, 2016; Volume 1355.
- Shen, Y.; Zhao, X.; Li, X. State of the art in dynamic modeling and load analysis of offshore floating wind turbines. J. Hunan Univ. Sci. Technol. (Nat. Sci. Ed.) 2017, 32, 23–31. [Google Scholar]
- Hansen, M.O.L.; Sørensen, J.N.; Voutsinas, S.; Sørensen, N.; Madsen, H.A. State of the art in wind turbine aerodynamics and aeroelasticity. Prog. Aerosp. Sci. 2006, 42, 285–330. [Google Scholar] [CrossRef]
- Browning, J.R.; Jonkman, J.; Robertson, A.; Goupee, A.J. Calibration and validation of a spar-type floating offshore wind turbine model using the FAST dynamic simulation tool. J. Phys. Conf. Ser. 2014, 555, 012015. [Google Scholar] [CrossRef]
- Coulling, A.J.; Goupee, A.J.; Robertson, A.N.; Jonkman, J.M.; Dagher, H.J. Validation of a FAST semi-submersible floating wind turbine numerical model with DeepCwind test data. J. Renew. Sustain. Energy 2013, 5, 023116. [Google Scholar] [CrossRef]
- Koo, B.; Goupee, A.J.; Lambrakos, K.; Lim, H.J. Model test correlation study for a floating wind turbine on a tension leg platform. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar]
- Martin, H.R.; Kimball, R.W.; Viselli, A.M.; Goupee, A.J. Methodology for wind/wave basin testing of floating offshore wind turbines. J. Offshore Mech. Arct. Eng. 2014, 136, 020905. [Google Scholar] [CrossRef]
- Adam, F.; Myland, T.; Dahlhaus, F.; Großmann, J. Scale tests of the GICON®-TLP for wind turbines. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Chen, J.; Hu, Z.; Wan, D.; Xiao, Q. Comparisons of the dynamical characteristics of a semi-submersible floating offshore wind turbine based on two different blade concepts. Ocean Eng. 2018, 153, 305–318. [Google Scholar] [CrossRef]
- Duan, F.; Hu, Z.; Liu, G.; Wang, J. Experimental comparisons of dynamic properties of floating wind turbine systems based on two different rotor concepts. Appl. Ocean Res. 2016, 58, 266–280. [Google Scholar] [CrossRef]
- Belloli, M.; Bayati, I.; Facchinetti, A.; Fontanella, A.; Giberti, H.; La Mura, F.; Taruffi, F.; Zasso, A. A hybrid methodology for wind tunnel testing of floating offshore wind turbines. Ocean Eng. 2020, 210, 107592. [Google Scholar] [CrossRef]
- Fontanella, A.; Bayati, I.; Taruffi, F.; Mura, F.; Facchinetti, A.; Belloli, M. A 6-DOFs hardware-in-the-loop system for wind tunnel tests of floating offshore wind turbines. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- Bayati, I.; Belloli, M.; Bernini, L.; Zasso, A. Aerodynamic design methodology for wind tunnel tests of wind turbine rotors. J. Wind Eng. Ind. Aerodyn. 2017, 167, 217–227. [Google Scholar] [CrossRef]
- Bayati, I.; Belloli, M.; Bernini, L. Qualification of Innovative Floating Substructures for 10 MW Wind Turbines and Water Depths Greater than 50m: LIFES50+ D3. 1 AeroDyn Validated Model; Technical Report; Politecnico di Milano: Milan, Italy, 2016. [Google Scholar]
- Méndez, J.; Greiner, D. Wind blade chord and twist angle optimization using genetic algorithms. In Proceedings of the 5th International Conference on Engineering Computational Technology, Las Palmas de Gran Canaria, Spain, 12–15 September 2006; pp. 12–15. [Google Scholar]
- Eke, G.B.; Onyewudiala, J.I. Optimization of wind turbine blades using genetic algorithm. Glob. J. Res. Eng. 2010, 10, 22–26. [Google Scholar]
- Yang, Y.; Li, C.; Zhang, W.; Yang, J.; Ye, Z.; Miao, W.; Ye, K. A multi-objective optimization for HAWT blades design by considering structural strength. J. Mech. Sci. Technol. 2016, 30, 3693–3703. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009.
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Hansen, M.H.; Blasques, J.P.A.A.; Gaunaa, M.; Natarajan, A.; et al. The DTU 10-MW reference wind turbine. In Proceedings of the Danish Wind Power Research 2013, Fredericia, Denmark, 27–28 May 2013. [Google Scholar]
- Moriarty, P.J.; Hansen, A.C. AeroDyn Theory Manual; National Renewable Energy Lab.: Golden, CO, USA, 2005.
- Hansen, M. Aerodynamics of Wind Turbines; Routledge: London, UK, 2015. [Google Scholar]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Sivanandam, S.N.; Deepa, S.N. Genetic algorithms. In Introduction to Genetic Algorithms; Springer: Berlin/Heidelberg, Germany, 2008; pp. 15–37. [Google Scholar]
- Selig, M.S. Summary of Low-Speed Airfoil Data; SOARTECH Publications: Virginia Beach, VA, USA, 1995. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Expression | Values |
|---|---|---|
| Length | 1/75 | |
| Velocity | 1/2 | |
| Mass | 1/421,875 | |
| Time | 1/37.5 | |
| Frequency | 37.5 | |
| Acceleration | 18.75 | |
| Force | 1/22,500 | |
| Moment | 1/1,687,500 |
| Parameters | Values | |||
|---|---|---|---|---|
| NREL 5 MW | DTU 10 MW | |||
| Prototype | Model | Prototype | Model | |
| Cut-in wind speed | 3 m/s | 1.5 m/s | 4 m/s | 2 m/s |
| Rated wind speed | 11.4 m/s | 5.7 m/s | 11.4 m/s | 5.7 m/s |
| Cut-out wind speed | 25 m/s | 12.5 m/s | 25 m/s | 12.5 m/s |
| Hub diameters | 3 m | 0.04 m | 5.6 m | 0.075 m |
| Rotor diameters | 126 m | 1.68 m | 178.3 m | 2.38 m |
| Cut-in rotational speed | 6.9 rpm | 258.75 rpm | 6 rpm | 225 rpm |
| Cut-out rotational speed | 12.1 rpm | 453.75 rpm | 9.6 rpm | 360 rpm |
| Case | Fitness Function | Degree of Interpolation Polynomial |
|---|---|---|
| I | A | Cubic |
| II | Quartic | |
| III | Quintic |
| Case | NREL 5 MW | DTU 10 MW | ||
|---|---|---|---|---|
| Maximum | Average | Maximum | Average | |
| I | 16.57% | 6.32% | 11.72% | 5.51% |
| II | 3.28% | 1.09% | 4.11% | 2.21% |
| III | 19.18% | 6.55% | 11.01% | 5.38% |
| Fitness Function | Maximum | Average |
|---|---|---|
| A | 3.28% | 1.09% |
| B | 5.56% | 2.70% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Chen, C.; Yin, G.; Ong, M.C.; Lu, H.; Fan, T. Design Methodology of Wind Turbine Rotor Models Based on Aerodynamic Thrust and Torque Equivalence. J. Mar. Sci. Eng. 2024, 12, 1. https://doi.org/10.3390/jmse12010001
Ma Y, Chen C, Yin G, Ong MC, Lu H, Fan T. Design Methodology of Wind Turbine Rotor Models Based on Aerodynamic Thrust and Torque Equivalence. Journal of Marine Science and Engineering. 2024; 12(1):1. https://doi.org/10.3390/jmse12010001
Chicago/Turabian StyleMa, Yuan, Chaohe Chen, Guang Yin, Muk Chen Ong, Hongchao Lu, and Tianhui Fan. 2024. "Design Methodology of Wind Turbine Rotor Models Based on Aerodynamic Thrust and Torque Equivalence" Journal of Marine Science and Engineering 12, no. 1: 1. https://doi.org/10.3390/jmse12010001
APA StyleMa, Y., Chen, C., Yin, G., Ong, M. C., Lu, H., & Fan, T. (2024). Design Methodology of Wind Turbine Rotor Models Based on Aerodynamic Thrust and Torque Equivalence. Journal of Marine Science and Engineering, 12(1), 1. https://doi.org/10.3390/jmse12010001