
Rule-Based Control Studies of LNG–Battery Hybrid Tugboat

 ,
,  ,
, 
Abstract
1. Introduction
2. System Overview
2.1. Loading Profile
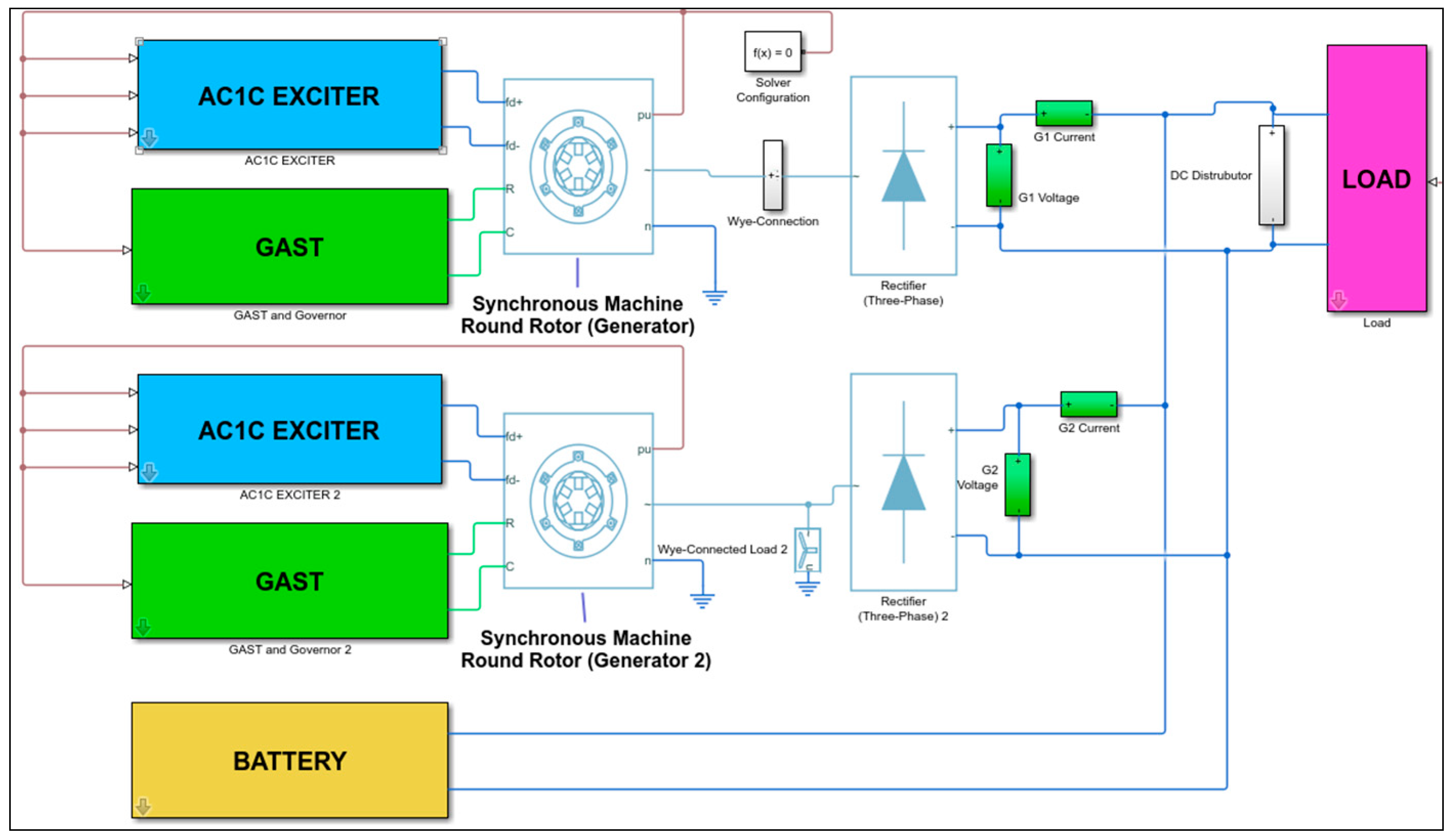
2.2. Modelling of Hybrid LNG–Battery Power System
2.2.1. Genset System
2.2.2. GAST System
2.2.3. Battery System
2.2.4. Energy Management System
3. Mathematical Overview
3.1. Diesel Fuel Consumption
3.2. LNG Consumption
3.3. Battery Consumption
3.4. CO2 Emissions
3.5. EEOI and CII
4. Results and Discussions
4.1. Case 1: Manually Logged Operational Data
4.2. Case 2: Designed Operational Profile
4.3. Case 3: Past Operational Data from Sensors
4.4. Comparisons between Cases 1, 2 and 3
4.5. Rule-Based (RB) Control Strategy
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Maritime Organization, Prevention of Air Pollution from Ships. Available online: https://www.imo.org/en/OurWork/Environment/Pages/Air-Pollution.aspx (accessed on 25 October 2022).
- International Maritime Organisation, The 2020 Global Sulphur Limit: FAQ. Available online: http://www.imo.org/en/MediaCentre/HotTopics/GHG/Documents/FAQ_2020_English.pdf (accessed on 13 December 2022).
- Tadros, M.; Ventura, M.; Soares, C.G. Review of Current Regulations, Available Technologies, and Future Trends in the Green Shipping Industry. Ocean Eng. 2023, 280, 114670. [Google Scholar] [CrossRef]
- Mallouppas, G.; Yfantis, E.A. Decarbonization in Shipping Industry: A Review of Research, Technology Development, and Innovation Proposals. J. Mar. Sci. Eng. 2021, 9, 415. [Google Scholar] [CrossRef]
- Maloni, M.; Paul, J.A.; Gligor, D.M. Slow Steaming Impacts on Ocean Carriers and Shippers. Marit. Econ. Logist. 2013, 15, 151–171. [Google Scholar] [CrossRef]
- Fotopoulos, A.G.; Margaris, D.P. Computational Analysis of Air Lubrication System for Commercial Shipping and Impacts on Fuel Consumption. Computation 2020, 8, 38. [Google Scholar] [CrossRef]
- The Marine Environment Protection Committee. Resolution MEPC.203(62); The Marine Environment Protection Committee: London, UK, 2011. [Google Scholar]
- The Marine Environment Protection Committee. Resolution MEPC.328(76)—Amendments to the Annex of the Protocol of 1997 to Amend the International Convention for the Prevention of Pollution from Ships 1973, as Modified by the Protocol of 1978 Relating Thereto 2021 Revised MARPOL Annex VI; The Marine Environment Protection Committee: London, UK, 2021. [Google Scholar]
- ClassNK, Outlines of EEXI Regulation EEDI Section of Marine GHG Certification Department. Available online: https://www.classnk.or.jp/hp/pdf/activities/statutory/eexi/eexi_rev3e.pdf (accessed on 13 December 2022).
- Gianni, M.; Pietra, A.; Coraddu, A.; Taccani, R. Impact of SOFC Power Generation Plant on Carbon Intensity Index (CII) Calculation for Cruise Ships. J. Mar. Sci. Eng. 2022, 10, 1478. [Google Scholar] [CrossRef]
- Ejder, E.; Arslanoğlu, Y. Evaluation of Ammonia Fueled Engine for a Bulk Carrier in Marine Decarbonization Pathways. J. Clean. Prod. 2022, 379, 134688. [Google Scholar] [CrossRef]
- Moreno, V.M. Future Trends in Electric Propulsion Systems for Commercial Vessels. J. Marit. Res. 2007, 4, 81–100. [Google Scholar]
- Ship Technology, Ampere Electric-Powered Ferry. Available online: https://www.ship-technology.com/projects/norled-zerocat-electric-powered-ferry/ (accessed on 25 November 2022).
- Chua, L.W.Y.; Tjahjowidodo, T.; Seet, G.G.L.; Chan, R. Implementation of Optimization-Based Power Management for All-Electric Hybrid Vessels. IEEE Access 2018, 6, 74339–74354. [Google Scholar] [CrossRef]
- Roslan, S.B.; Konovessis, D.; Tay, Z.Y. Sustainable Hybrid Marine Power Systems for Power Management Optimisation: A Review. Energies 2022, 15, 9622. [Google Scholar] [CrossRef]
- Karaçay, Ö.E.; Özsoysal, O.A. Techno-Economic Investigation of Alternative Propulsion Systems for Tugboats. Energy Convers. Manag. X 2021, 12, 100140. [Google Scholar] [CrossRef]
- Lebedevas, S.; Norkevičius, L.; Zhou, P. Investigation of Effect on Environmental Performance of Using LNG as Fuel for Engines in Seaport Tugboats. J. Mar. Sci. Eng. 2021, 9, 123. [Google Scholar] [CrossRef]
- Zhang, B.; Jiang, Y.; Chen, Y. Research on Calibration, Economy and PM Emissions of a Marine LNG–Diesel Dual-Fuel Engine. J. Mar. Sci. Eng. 2022, 10, 239. [Google Scholar] [CrossRef]
- Vadset, M.S. Modeling and Operation of Hybrid Ferry with Gas Engine, Synchronous Machine and Battery. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2018. [Google Scholar]
- Wu, X.; Song, Y.; Wang, Y. Estimation Model for Loads of Ship Power System Based on Fuzzy SOFM Network. Shipbuild. China 2003, 44, 65–70. [Google Scholar]
- Breijs, A.; Amam, E.E. Energy Management–Adapt Your Engine to Every Mission. In Proceedings of the 13th International Naval Engineering Conference, Hong Kong, China, 13–14 October 2016; pp. 1–8. [Google Scholar]
- Anvari-Moghaddam, A.; Dragicevic, T.; Meng, L.; Sun, B.; Guerrero, J.M. Optimal Planning and Operation Management of a Ship Electrical Power System with Energy Storage System. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 2095–2099. [Google Scholar] [CrossRef]
- Banaei, M.; Ghanami, F.; Rafiei, M.; Boudjadar, J.; Khooban, M.-H. Energy Management of Hybrid Diesel/Battery Ships in Multidisciplinary Emission Policy Areas. Energies 2020, 13, 4179. [Google Scholar] [CrossRef]
- Kalikatzarakis, M.; Geertsma, R.D.; Boonen, E.J.; Visser, K.; Negenborn, R.R. Ship Energy Management for Hybrid Propulsion and Power Supply with Shore Charging. Control Eng. Pract. 2018, 76, 133–154. [Google Scholar] [CrossRef]
- Tay, Z.Y.; Hadi, J.; Chow, F.; Loh, D.J.; Konovessis, D. Big Data Analytics and Machine Learning of Harbour Craft Vessels to Achieve Fuel Efficiency: A Review. J. Mar. Sci. Eng. 2021, 9, 1351. [Google Scholar] [CrossRef]
- Tay, Z.Y.; Hadi, J.; Konovessis, D.; Loh, D.J.; Tan, D.K.H.; Chen, X. Efficient Harbour Craft Monitoring System: Time-Series Data Analytics and Machine Learning Tools to Achieve Fuel Efficiency by Operational Scoring System. In Proceedings of the ASME 2021 40th International Conference on Ocean, Offshore and Arctic Engineering OMAE 2021, Virtual Online, 21–30 June 2021. [Google Scholar]
- Fam, M.L.; Tay, Z.Y.; Konovessis, D. An Artificial Neural Network for Fuel Efficiency Analysis for Cargo Vessel Operation. Ocean Eng. 2022, 264, 112437. [Google Scholar] [CrossRef]
- Hadi, J.; Konovessis, D.; Tay, Z.Y. Achieving Fuel Efficiency of Harbour Craft Vessel via Combined Time-Series and Classification Machine Learning Model with Operational Data. Marit. Transp. Res. 2022, 3, 100073. [Google Scholar] [CrossRef]
- Abebe, M.; Shin, Y.; Noh, Y.; Lee, S.; Lee, I. Machine Learning Approaches for Ship Speed Prediction towards Energy Efficient Shipping. Appl. Sci. 2020, 10, 2325. [Google Scholar] [CrossRef]
- Cheliotis, M.; Lazakis, I.; Theotokatos, G. Machine Learning and Data-Driven Fault Detection for Ship Systems Operations. Ocean Eng. 2020, 216, 107968. [Google Scholar] [CrossRef]
- Hadi, J.; Konovessis, D.; Tay, Z.Y. Filtering Harbor Craft Vessels’ Fuel Data Using Statistical, Decomposition, and Predictive Methodologies. Marit. Transp. Res. 2022, 3, 100063. [Google Scholar] [CrossRef]
- Mirović, M.; Miličević, M.; Obradović, I. Big Data in the Maritime Industry. NAŠE MORE Znan. Časopis More Pomor. 2018, 65, 56–62. [Google Scholar] [CrossRef]
- Zahedi, B.; Norum, L.E.; Ludvigsen, K.B. Optimized Efficiency of All-Electric Ships by Dc Hybrid Power Systems. J. Power Sources 2014, 255, 341–354. [Google Scholar] [CrossRef]
- MathWorks, Synchronous Machine Round Rotor. Available online: https://www.mathworks.com/help/sps/ref/synchronousmachineroundrotor.html?searchHighlight=synchronous_generator_round&s_tid=srchtitle_synchronous_generator_round_1 (accessed on 6 January 2023).
- Saini, M.K. Difference between Cylindrical Rotor and Salient Pole Rotor Synchronous Generator. Available online: https://www.tutorialspoint.com/difference-between-cylindrical-rotor-and-salient-pole-rotor-synchronous-generator# (accessed on 6 January 2023).
- IEEE Std 421.5-2016; (Revision of IEEE Std 421.5-2005): IEEE Recommended Practice for Excitation System Models for Power System Stability Studies. IEEE: New York, NY, USA, 2016; Volume 2016, pp. 1–207.
- Lai, J. Parameter Estimation of Excitation Systems. Master’s Thesis, Graduate Faculty of North Carolina State University, Raleigh, NC, USA, 2007. [Google Scholar]
- Mahat, P.; Chen, Z.; Bak-Jensen, B. Gas Turbine Control for Islanding Operation of Distribution Systems. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; IEEE: New York, NY, USA, 2009; pp. 1–7. [Google Scholar]
- Dung, N.A.; Hieu, P.P.; Hsieh, Y.; Lin, J.; Liu, Y.; Chiu, H. A Novel Low-loss Control Strategy for Bidirectional DC–DC Converter. Int. J. Circuit Theory Appl. 2017, 45, 1801–1813. [Google Scholar] [CrossRef]
- Chua, L.W.Y. A Strategy for Power Management of Electric Hybrid Marine Power Systems. Ph.D. Thesis, Nanyang Technological University, Singapore, 2019. [Google Scholar]
- Nebb, O.C.; Zahedi, B.; Lindtjorn, J.O.; Norum, L. Increased Fuel Efficiency in Ship LVDC Power Distribution Systems. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Republic of Korea, 9–12 October 2012; pp. 564–568. [Google Scholar] [CrossRef]
- Hansen, J.F. Modelling and Control of Marine Power Systems. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2000. [Google Scholar]
- Ship&Bunker, Singapore Bunker Prices—Ship & Bunker. Available online: https://shipandbunker.com/prices/apac/sea/sg-sin-singapore#MGO (accessed on 3 January 2023).
- IndexMundi, Natural Gas vs Diesel—Price Rate of Change Comparison. Available online: https://www.indexmundi.com/commodities/?commodity=natural-gas¤cy=sgd&commodity=diesel (accessed on 20 December 2022).
- Kersey, J.; Popovich, N.D.; Phadke, A.A. Rapid Battery Cost Declines Accelerate the Prospects of All-Electric Interregional Container Shipping. Nat. Energy 2022, 7, 664–674. [Google Scholar] [CrossRef]
- Heliox, The Future Is Megawatt Charging. Available online: https://www.heliox-energy.com/blog/the-future-is-megawatt-charging (accessed on 16 June 2023).
- The Marine Environment Protection Committee. Resolution MEPC.245(66)-2014 Guidelines on the Method of Calculation of the Attained Energy Efficiency Design Index (EEDI) for New Ships; The Marine Environment Protection Committee: London, UK, 2014. [Google Scholar]
- The Marine Environment Protection Committee. Resolution MEPC.353 (78)—2022 Guidelines on the Reference Lines for Use with Operational Carbon Intensity Indicators (CII Reference Lines Guidelines, G2); The Marine Environment Protection Committee: London, UK, 2022. [Google Scholar]
- The Marine Environment Protection Committee. Resolution MEPC.354(78)—2022 Guidelines on the Operational Carbon Intensity Rating of Ships (CII Rating Guidelines, G4); The Marine Environment Protection Committee: London, UK, 2022. [Google Scholar]
- L&T Electrical & Automation, Understanding Current & Voltage Harmonics. Available online: https://www.lntebg.in/about-us/blog/understanding-current-voltage-harmonics/ (accessed on 5 January 2023).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Unit |
|---|---|---|
| Rated electrical frequency | 50 | Hz |
| Rated apparent power | 1865 | kVA |
| Rated voltage | 545 | V |
| Number of poles | 3 | - |
| Description | Value | Unit |
|---|---|---|
| Speed governor proportional gain, | 25 | pu |
| Speed governor time constant, | 25 | s |
| Feedback gain, | 0 | pu |
| Controller time constant, | 0.05 | s |
| Load limiter time constant, | 0.1 | s |
| Temperate limiter time constant, | 5.0 | s |
| Temperate limit gain, | 5 | s |
| Ambient temperature load limit, | 1.0 | pu |
| Controller maximum output, | 1.0 | pu |
| Controller minimum output, | 0 | pu |
| Ship Type | Ship Size | B | C | D | E |
|---|---|---|---|---|---|
| Bulk Carrier | 0.86 | 0.94 | 1.06 | 1.18 | |
| Gas Carrier | DWT ≥ 65,000 | 0.81 | 0.91 | 1.12 | 1.44 |
| DWT < 65,000 | 0.85 | 0.95 | 1.06 | 1.25 | |
| Tanker | 0.82 | 0.93 | 1.08 | 1.28 | |
| Container Ship | 0.83 | 0.94 | 1.07 | 1.19 | |
| General Cargo Ship | 0.83 | 0.94 | 1.06 | 1.19 | |
| Refrigerated Cargo Carrier | 0.78 | 0.91 | 1.07 | 1.20 | |
| Combination Carrier | 0.87 | 0.96 | 1.06 | 1.14 | |
| LNG Carrier | DWT ≥ 100,000 | 0.89 | 0.98 | 1.06 | 1.13 |
| DWT < 100,000 | 0.78 | 0.92 | 1.10 | 1.37 | |
| Ro-ro Cargo Ship (VC) | 0.86 | 0.94 | 1.06 | 1.16 | |
| Ro-ro Cargo Ship | 0.76 | 0.89 | 1.08 | 1.27 | |
| Ro-ro Passenger Ship | 0.76 | 0.92 | 1.14 | 1.30 | |
| Cruise Passenger Ship | 0.87 | 0.95 | 1.06 | 1.16 |
| Operation | RPM (per Engine) | Load (kW) | Amount of Time (%) |
|---|---|---|---|
| Transiting | 394 | 450 | 50.97 |
| Tugging | 386 | 422 | 14.17 |
| Idle (Waiting) | 387 | 424 | 12.14 |
| Idle (Tugging) | 392 | 443 | 22.72 |
| Fuel Type | Daily Cost (USD) | CO2 Emission (Tonne) | (CO2 g/tn-nm) | % Reduction * | |
|---|---|---|---|---|---|
| in Daily Cost | in CO2 Emission and EEOI | ||||
| Diesel | 2445 | 7.66 | 78.6 | - | - |
| LNG (F) | 2508 | 8.53 | 87.6 | −2.6 | −11.4 |
| LNG (V) | 1821 | 6.20 | 63.6 | 25.5 | 19.1 |
| LNG (V + B) | 434 | 0.83 | 8.53 | 82.2 | 89.2 |
| Operation | Load (kW) | Amount of Time (%) |
|---|---|---|
| Idle | 420 | 10 |
| 6-knot Transit | 588 | 25 |
| 10-knot Transit | 980 | 10 |
| 12-knot Transit | 1176 | 20 |
| Tugging | 440 | 35 |
| Fuel Type | Daily Cost (USD) | CO2 Emission (Tonne) | (CO2 g/tn-nm) | % Reduction * | |
|---|---|---|---|---|---|
| in Daily Cost | in CO2 Emission and EEOI | ||||
| Diesel | 3522 | 11.03 | 113.2 | - | - |
| LNG (F) | 3236 | 11.01 | 113 | 8.1 | 0.2 |
| LNG (V) | 2515 | 8.56 | 87.8 | 28.6 | 22.4 |
| LNG (V + B) | 1391 | 4.11 | 42.3 | 60.5 | 62.7 |
| Fuel Type | Daily Cost (USD) | CO2 Emission (Tonne) | (CO2 g/tn-nm) | % Reduction * | |
|---|---|---|---|---|---|
| in Daily Cost | in CO2 Emission and EEOI | ||||
| Diesel | 3669 | 11.49 | 117.9 | - | - |
| LNG (F) | 3331 | 11.33 | 116.3 | 9.2 | 1.4 |
| LNG (V) | 2807 | 9.55 | 98.0 | 23.5 | 16.9 |
| LNG (V + B) | 1645 | 4.95 | 50.8 | 55.2 | 56.9 |
| Diesel | LNG (F) | LNG (V) | LNG (V + B) | |
|---|---|---|---|---|
| Daily Cost (USD) | 3212 | 3025 | 2381 | 1157 |
| Difference | - | 5.8% | 25.9% | 64.0% |
| Diesel | LNG (F) | LNG (V) | LNG (V + B) | |
|---|---|---|---|---|
| CO2 (tonne) | 10.06 | 10.29 | 8.10 | 3.30 |
| Difference | - | −2.3% | 19.5% | 67.2% |
| Fuel Type | Year | |||||
|---|---|---|---|---|---|---|
| 2023 | 2024 | 2025 | 2026 | 2027 | ||
| Case 1 | Diesel | E | E | E | E | E |
| LNG (F) | E | E | E | E | E | |
| LNG (V) | D | E | E | E | E | |
| LNG (V + B) | A | A | A | A | A | |
| Case 2 | Diesel | E | E | E | E | E |
| LNG (F) | E | E | E | E | E | |
| LNG (V) | E | E | E | E | E | |
| LNG (V + B) | A | A | A | A | A | |
| Case 3 | Diesel | C | C | D | D | D |
| LNG (F) | D | E | E | E | E | |
| LNG (V) | A | A | B | B | B | |
| LNG (V + B) | A | A | A | A | A | |
| Fuel Type | Daily Cost (USD) | CO2 Emission (Tonne) | (CO2 g/tn-nm) | % Reduction * | ||
|---|---|---|---|---|---|---|
| in Daily Cost | ||||||
| Diesel | 3522 | 11.03 | 113.2 | - | - | - |
| LNG (V + B) w/o Control | 1391 | 4.11 | 42.3 | 60.5 | 62.7 | 52 |
| LNG (V + B) Control 80/20 | 2434 | 8.06 | 82.7 | 30.9 | 26.9 | 18 |
| LNG (V + B) Control On/Off | 607 | 1.48 | 15.2 | 82.8 | 86.5 | 48 |
| Fuel Type | Daily Cost (USD) | CO2 Emission (Tonne) | (CO2 g/tn-nm) | % Reduction * | ||
|---|---|---|---|---|---|---|
| in Daily Cost | in | |||||
| Diesel | 3522 | 11.03 | 113.2 | - | - | - |
| 10% LNG/90% Battery | 553 | 0.97 | 10.0 | 84.3 | 91.2 | 74 |
| 20% LNG/80% Battery | 654 | 1.40 | 14.4 | 81.4 | 87.3 | 68 |
| 30% LNG/70% Battery | 1040 | 2.82 | 29.0 | 70.5 | 74.4 | 59 |
| 40% LNG/60% Battery | 1536 | 4.57 | 46.9 | 56.4 | 58.5 | 54 |
| 50% LNG/50% Battery | 1654 | 5.01 | 51.4 | 53.0 | 54.6 | 50 |
| 60% LNG/40% Battery | 1930 | 6.07 | 62.3 | 45.2 | 45.0 | 41 |
| 70% LNG/30% Battery | 2050 | 6.58 | 67.6 | 41.8 | 40.3 | 32 |
| 80% LNG/20% Battery | 2434 | 8.06 | 82.7 | 30.9 | 26.9 | 18 |
| 90% LNG/10% Battery | 2763 | 9.30 | 95.4 | 21.6 | 15.7 | 9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roslan, S.B.; Tay, Z.Y.; Konovessis, D.; Ang, J.H.; Menon, N.V. Rule-Based Control Studies of LNG–Battery Hybrid Tugboat. J. Mar. Sci. Eng. 2023, 11, 1307. https://doi.org/10.3390/jmse11071307
Roslan SB, Tay ZY, Konovessis D, Ang JH, Menon NV. Rule-Based Control Studies of LNG–Battery Hybrid Tugboat. Journal of Marine Science and Engineering. 2023; 11(7):1307. https://doi.org/10.3390/jmse11071307
Chicago/Turabian StyleRoslan, Sharul Baggio, Zhi Yung Tay, Dimitrios Konovessis, Joo Hock Ang, and Nirmal Vineeth Menon. 2023. "Rule-Based Control Studies of LNG–Battery Hybrid Tugboat" Journal of Marine Science and Engineering 11, no. 7: 1307. https://doi.org/10.3390/jmse11071307
APA StyleRoslan, S. B., Tay, Z. Y., Konovessis, D., Ang, J. H., & Menon, N. V. (2023). Rule-Based Control Studies of LNG–Battery Hybrid Tugboat. Journal of Marine Science and Engineering, 11(7), 1307. https://doi.org/10.3390/jmse11071307