



Exploring Autonomous and Remotely Operated Vehicles in Offshore Structure Inspections

 , , , , , and
, , , , , and 
Abstract
1. Introduction
1.1. Context
1.2. Challenges of Traditional Offshore Inspection Methods
1.3. Advancements in Autonomous Technologies
1.4. Recommendations for Offshore Inspections
1.5. Content of the Paper
2. Inspection Requirements for Offshore Production Units
2.1. Zones of Inspections
- Z1
- Superstructure (from the lower deck to the upper mast): This refers to the upper part of the offshore platform, including living quarters, helidecks, and process equipment (modules). Inspections in this zone are crucial to ensure the safety and functionality of the equipment and structures located on the topside [38]. The accessibility of this zone is relatively easier compared to other areas, as it can be reached by personnel and equipment through stairs or elevators, except for some specific structures, such as flares and towers.
- Z2
- Splash/Spray zone (from the waterline to the lower deck): This zone is located above the waterline and includes areas that are exposed to waves, wind, and occasional splashes of seawater. Inspections in the splash/spray zone are crucial, as this area is susceptible to corrosion and degradation as a result of exposure to harsh environmental conditions [39]. However, this area is difficult to access and requires specialised equipment and techniques for inspection (climbing).
- Z3
- Subsea zone near the water line (below the water line up to 50 m depth): This zone encompasses the hull of the floating/fixed platform [40], as well as the equipment and connections of the risers. Inspections in this subsea zone are crucial to ensure the integrity of the hull and the proper functioning of the risers [12]. Accessing this zone for inspections can be challenging, as it commonly requires diving. Today, common ROVs and AUVs cannot operate in this depth due to limitations in their capabilities and manoeuvrability.
- Z4
- Subsea dynamic zone (from 50 m depth until the touchdown point (TDP) and pipe anchoring system laying on the seabed): This zone includes the risers that carry hydrocarbons from the subsea wells to the top-side processing facility [37]. Inspections in this subsea dynamic zone are critical in identifying potential defects or damage to the risers that could lead to leaks or failures. Inspections in this zone are particularly challenging due to the extreme depths and harsh conditions encountered. The “vertical” position of the pipes and their movements may make the inspection process difficult.
- Z5
- Subsea submerged zone (all assets laying on the seabed): This zone encompasses all assets located on the seabed, such as pipelines, structures, and equipment [28]. Inspections in this submerged subsea zone are essential to detect any damage, corrosion, or integrity issues that could affect the safety and reliability of the assets [41]. This area may be easier to inspect, as the pipes are horizontal and fixed on the seabed. However, from time to time, the equipment may be submerged in sediment or covered with marine growth, making inspections more challenging.
3. Common Approaches of Offshore Inspection
4. State of the Art of Autonomous and Remotely Operated Vehicles in Offshore Structure Inspections
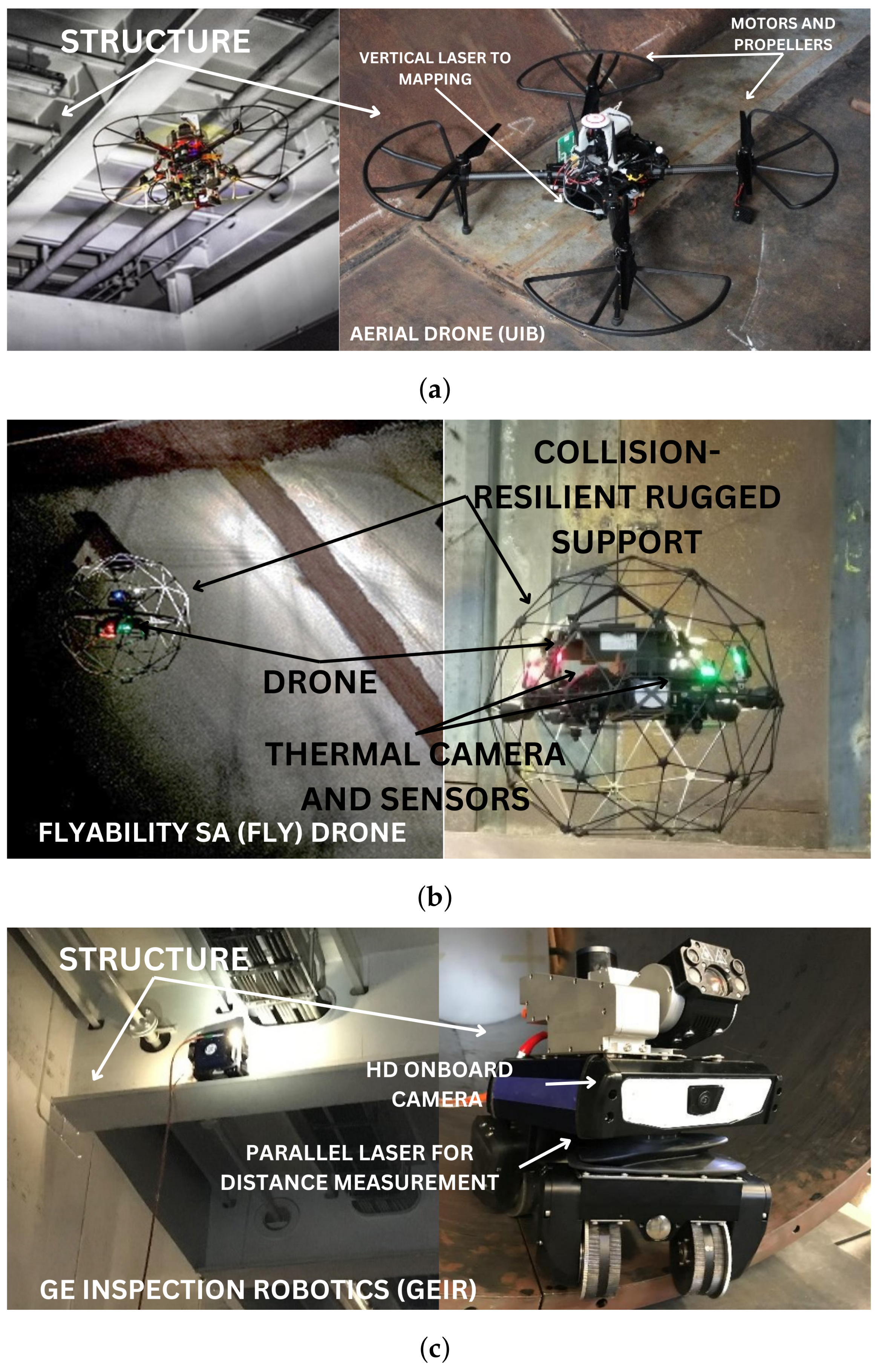
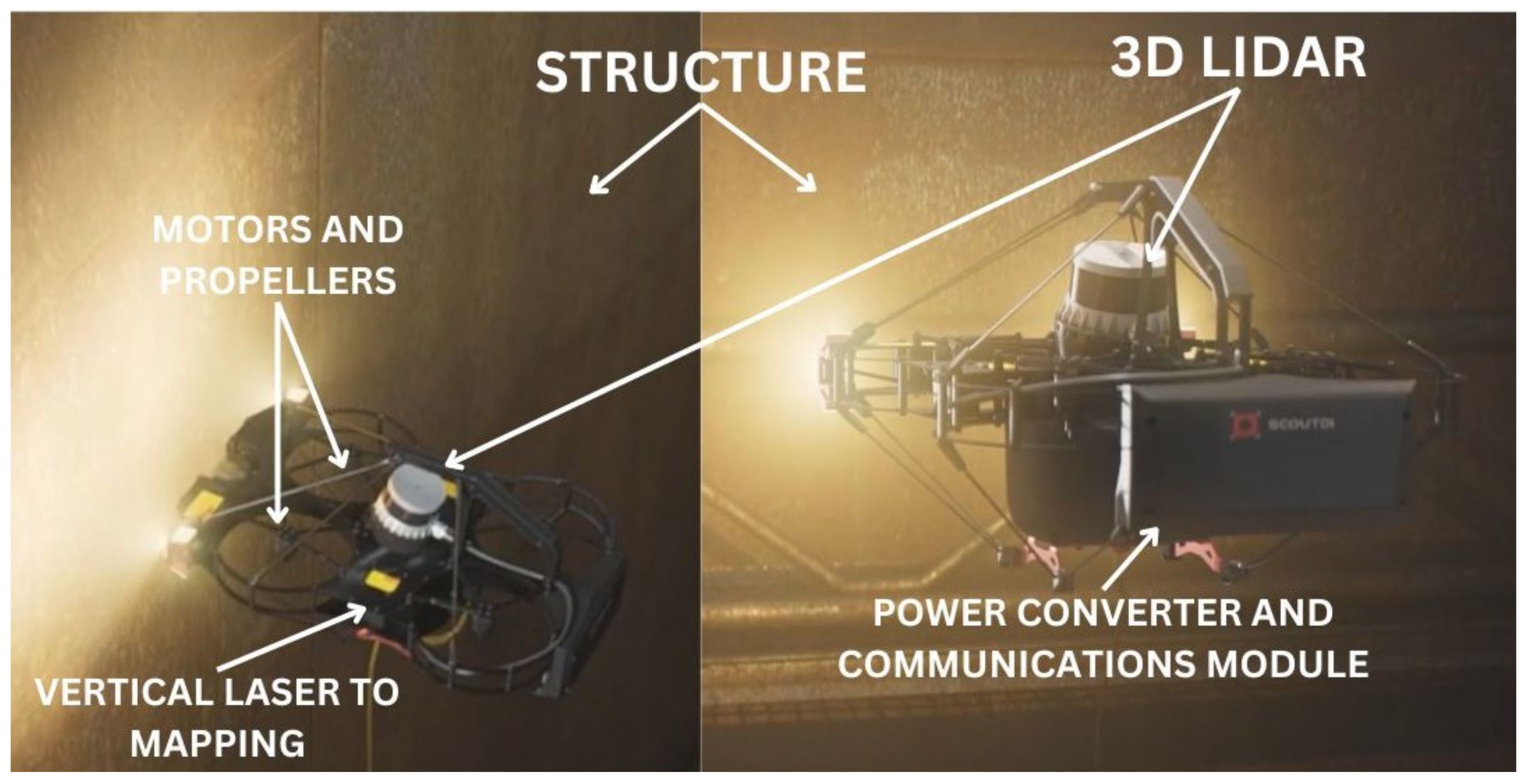
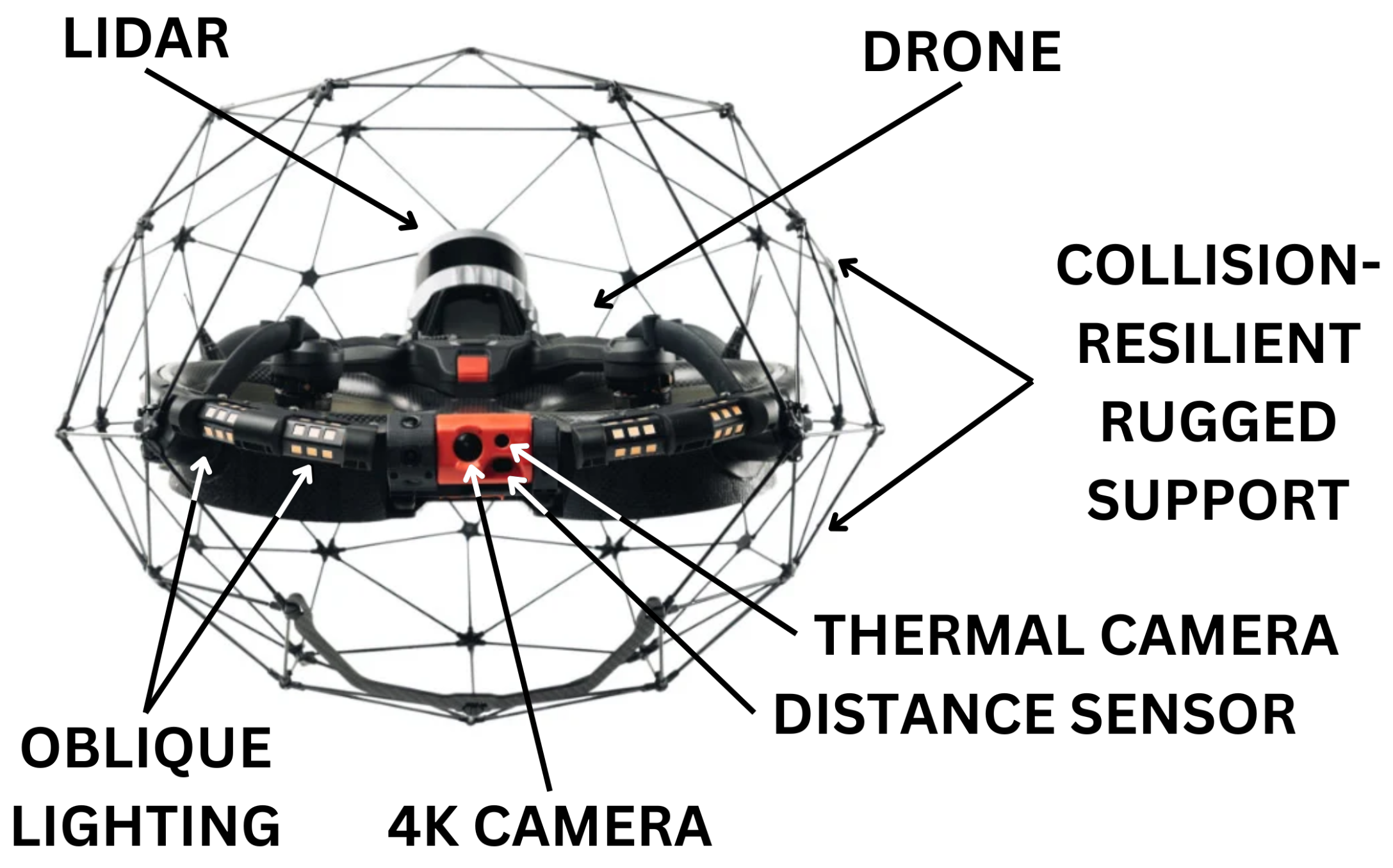
4.1. Unmanned Aerial Vehicle (UAV)—Drones
- Hull: Drones can provide a detailed view of any part of the hull of a ship, identifying sections with corrosion, cracks, or other damage.
- Riser balconies: These are critical points on an offshore platform. Drones can reach difficult-to-access places to inspect these areas.
- Topside: The upper portion of an offshore structure can be easily inspected by drones to check for structural integrity, leakage, weather-induced damage, etc.
- Flare stacks: Inspections of flare stacks are necessary to check for corrosion, cracks, or blockages. Drones can perform this task without the need to stop operations.
- Internal tanks: Specialised drones can even inspect the interiors of large storage tanks on ships and units, including corrosion and leakage detection assessments.
- Hard-to-reach areas (underdecks, cranes, etc.): Drones can reach places that would be dangerous or difficult for humans to access, enabling inspection of complex areas, such as underdecks or cranes.
4.2. Remotely Operated Vehicles (ROV)
- Observation class: This category comprises vehicles ranging from micro-ROVs to vehicles weighing approximately 100 kg. These ROVs are designed for operations in relatively shallow waters, with depth restrictions up to 300 m. They typically have minimal or no payload capacity and operate on power systems that generate less than 15 kW. Micro-ROVs in the observation class are commonly used as backup units for divers or other ROVs, as well as to perform inspections in shallow-water environments [12].
- Light work class: The light work class of ROVs encompasses vehicles ranging from approximately 100 kg to 1000 kg. These ROVs can be deployed at depths of up to 1000 m and offer moderate payload capacities along with power systems capable of generating up to 55 kW.
- Work class: Designed specifically for construction work, the work class ROV is capable of operating at depths that reach a maximum of around 3000 m. With robust lift capabilities and ample payload capacity, work class ROVs enable efficient execution of various underwater tasks. These vehicles use power systems with a capacity greater than 75 kW.
- Heavy work class: At the top end is the heavy work class category, comprising highly specialised vehicles that can operate at depths up to 5000 m. With ultra-high payload capacities, these ROVs are capable of performing complex tasks such as deep-sea exploration, underwater construction, and oil rig maintenance. These heavy work class ROVs require powerful power systems, often exceeding 110 kW, to handle demanding tasks in challenging deep-water environments.

4.3. Autonomous Underwater Vehicle (AUV)

4.4. Autonomous Surface Vessel (ASV)

5. Comparative Analysis of Vehicle Technologies for Offshore Inspections
- Remotely operated vehicles (ROVs) are highly versatile tools for conducting inspections on offshore structures. They are capable of operating at various depths and performing precise control tasks, making them well-suited for detailed inspections. Additionally, ROVs excel in intervention and repair operations due to their teleoperated arms. However, it is important to note that the autonomy of ROVs is limited by tethered control, which can impact their overall effectiveness. Moreover, operational costs associated with the use of ROVs can be high, as they require a mother boat for support [110]. However, these vehicles come equipped with sensors such as cameras and sonar systems that enable accurate data collection during inspections. The work published by [111] describes ongoing research aimed at enhancing the autonomy of remotely operated vehicles (ROVs) for subsea inspection and maintenance operations. The project focusses on developing advanced navigation, guidance, and control systems with the goal of improving ROV capabilities and efficiency while aligning with industrial needs. Increased autonomy enables the ROV operator to change from manual to automatic control, utilising autonomous functions for a number of specific tasks.
- Autonomous underwater vehicles (AUVs) are highly suitable for conducting deep-sea inspections and efficiently collecting data with minimal human intervention. They excel at performing broad surveys and environmental assessments, thanks to their extensive operational range. However, AUVs have limitations when it comes to intervention capabilities, as they are primarily based on battery power, which restricts their operating time [112]. They are less versatile in terms of intervention capabilities compared to remotely operated underwater vehicles (ROVs) [113]. These innovative vehicles are equipped with advanced navigation sensors, sonar systems, and cameras that facilitate comprehensive underwater exploration in a variety of settings and conditions. Intervention-capable AUVs are an active field of research, with studies focussing on their modelling, control, and mechatronics integration [114]. The development of underwater swimming manipulators has been explored to enhance the intervention capabilities of AUVs [115].
- Autonomous surface vehicles (ASVs) are specifically designed for surface monitoring and the cost-effective collection of data during offshore inspections [116]. They have the ability to operate autonomously and are highly resistant to wave and current impacts, significantly improving both efficiency and coverage. However, it should be noted that ASVs may face certain regulatory challenges due to their limited manoeuvrability in surface waters. Despite this limitation, they remain well-suited for visual inspections, environmental monitoring, and bathymetry assessments and can provide valuable data in harsh sea conditions. The concept of AxVs, which refers to autonomous vehicles capable of operating in air, surface, and subsea environments simultaneously, is currently being researched [117]. Unlike current autonomous platforms that have limited operation capabilities (e.g., UAVs in the air, ASVs on the ocean surface, AUVs underwater), an AxV offers increased mobility by transiting between these different spaces. Although this research does not directly address offshore structure monitoring claims, it provides valuable context regarding advancements in autonomous vehicles within the maritime domain.
- Unmanned aerial vehicles (UAVs) have traditionally been utilised for aerial surveillance, photography, and videography in offshore inspections [118]. Their ease of deployment and cost-effectiveness have made them accessible even in confined areas. However, it should be noted that UAV endurance is highly dependent on weather conditions and its payload capacity has certain limitations [119]. These factors should be taken into consideration when planning UAV missions. UAVs rely on a variety of sensors, such as cameras, GPS, and LiDAR, for navigation and data collection purposes [118]. The emerging drone technology offers new capabilities for improved data collection agility, resolution, and efficiency, leading to enhanced workflows and increased safety. Although there is an increasing number of sensory systems and commercial service companies available in the market, literature documenting well-documented case studies in this field remains scarce, with only a few examples currently operational [120]. There are several factors that may hinder the widespread implementation of this technology within the industry. These include limited accessibility to suitable sensor systems due to high costs [121], restrictions on UAV payload weight which prohibit attachment of specific sensors or multiple sensors, limitations in battery life and flight time duration, adverse weather conditions such as winds, humidity, ambient temperature fluctuations alongside dust and rain interference concerns, scalability issues, as well as regulatory barriers such as line-of-sight rule compliance requirements [122].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ROVs | AUVs | ASVs | UAVs | |
|---|---|---|---|---|
| Definition | Remotely Operated Vehicles. | Autonomous Underwater Vehicles. | Autonomous Surface Vessels. | Unmanned Aerial Vehicles. |
| Common Applications | Offshore oil and gas inspections, underwater repairs, scientific research and heavy-duty operations [54,113,123]. | Used for underwater exploration, environmental survey, and data collection [113,124,125,126,127]. | Visual inspections, environmental monitoring, bathymetry [113,123,128]. | Primarily used for aerial surveillance, photography, and videography [84,127,129,130]. |
| Autonomy | Controlled by human operators, tethered control [113]. | Fully autonomous, minimal human intervention, resilient to wave and current impacts [113]. | Fully autonomous remote monitoring. Reduced risk in hazardous environments, increased efficiency and coverage. | Fully autonomous [129] or remote control. Efficient for infrastructure inspections. |
| Typical Depth Range | Varies from shallow to deep waters. | Can reach greater depths (thousands of metres). | Above the water surface. | Depends on type, usually limited to shallow waters for amphibians. |
| Range (Distance Travelled) | Limited working range [124]. | Wide range of areas [124]. | Limited range depending on fuel type. | Limited range depending on batery capacity [129]. |
| Maneuverability | Excellent control in 3D space [129]. | Good manoeuvrability in 3D space [129]. | Good manoeuvrability in surface waters. | Varies depending on type and purpose, may require human control [129]. |
| Duration of operation | Limited by power source and tether. | Hours to days. | Hours to days. | Minutes to hours. |
| Power Source | Typically tethered | Batteries | Batteries or fuel | Batteries |
| Battery Life | Typically longer mission endurance (tether). | Limited by battery life. | Moderate endurance depending on the use of fuel or batteries. | Limited by battery life. |
| Versatility | Versatile for various underwater tasks. Enables sophisticated equipment use such as actuator arms. | Specific to underwater environments. | Versatile for surface monitoring. Restricted by surface conditions such as waves and wind. | Versatile for aerial applications. Affected by weather conditions (wind), typically unable to operate underwater. |
| Payload Capacity | Generally higher payload capacity. | Limited payload capacity. | Moderate payload capacity. | Limited payload capacity for most models. |
| Remote Communication | Tethered or wireless. | Acoustic and wireless. | Radio waves, Wi-Fi, cellular, satellite. | Radio waves, Wi-Fi, cellular, satellite. |
| Control | Real-time control with tether from a surface station. | Autonomous navigation, limited real-time control. | Autonomous navigation. | Remote control and autonomous flight. |
| Deployment Flexibility | Dependent on deployment equipment. | Can be launched from ships, shores, or other vehicles. | Easily deployable from shore or vessel. | Easily deployable from various locations. |
| Cost | High initial and operational costs [113]. | High initial and operational costs [113]. | Moderate initial and operational costs [131]. | Cost varies depending on complexity and capabilities [131]. |
| Intervention Capabilities | Equipped with teleoperated arms for intervention tasks [113]. | Limited intervention capabilities [123]. | Possible collaborative operations with ROVs for intervention tasks [123]. | Not designed for intervention tasks [129] |
| Sensors | Cameras, sonar systems (side-scan, multibeam), sensors [54,131]. | Navigation sensors (IMU, DVL), sonar systems (side-scan, multibeam), cameras [125,131]. | Cameras, sensors for navigation (GPS, LiDAR) [54,113,123]. | Cameras, sensors for navigation (GPS, LiDAR) [84,113,129]. |
| Advantages | Precise control, dexterity, reliability. | Deep-sea exploration, data collection, efficiency. | Efficient, safe, cost-effective, data collection, accessibility. | Easy deployment, cost-effective, accessibility in tight spaces. |
| Disadvantages | Limited depth range, tether constraints, complex operation in deep waters, high operational costs (mother boat). | May be limited for shallow-water operations, dependency on batteries. | Limited manoeuvring, limited range, regulatory issues. | Limited endurance, weather-dependent, restricted payload, regulatory issues. |
| Zone | Specific Element | Risks and Challenges | Inspection Methods |
|---|---|---|---|
| 1 | Platform Structure | Corrosion, structural damage, damage due to fire or explosions, equipment malfunction. | Visual inspections, drone inspections, nondestructive tests such as ultrasound or radiography to detect internal defects in steel structures. |
| 2, 3 | Piping System | Leaks, corrosion, erosion, blockages. | Visual inspections, pressure tests, nondestructive tests. |
| 3.4 | Risers | Corrosion, erosion, fatigue damage due to platform movement and marine currents, damage by floating objects’ impact | Visual inspections with ROVs, ultrasound inspections to measure pipe wall thickness, inspections with pigs. |
| 3, 4 | Flexible Riser | Fatigue damage, wear and abrasion, corrosion, armour wire failure, exposure to marine environment, thermal cycling | Visual inspection, internal visual inspection, ultrasonic testing, acoustic emissions testing, flooded member detection, internal inspection, radiographic inspection. |
| 3, 4, 5 | Control Lines and Umbilicals | Leaks, blockages, damage due to platform movement. | Visual inspections with ROVs, hydraulic and electrical tests to verify functionality. |
| 4 | Mooring System | Wear of chains and cables, corrosion, damage to anchors. | Visual inspections with ROVs, tension measurement in mooring lines. |
| 4, 5 | Subsea Structure | Corrosion, structural fatigue, damage caused by marine life or water movement, sedimentation. | ROVs or AUVs equipped with cameras and sensors are utilised to visualise and inspect the structure. |
| 5 | Wellhead | Leaks, equipment malfunction, blockages. | ROVs can perform visual inspections and can also be equipped with sensors to detect hydrocarbon leaks. |
| 5 | Flowlines | Corrosion, erosion, leaks, blockages, deformation due to ground movement or marine currents. | AUVs can be used for long-range inspections. Also, internal inspection tools, known as pigs, are inserted into the pipeline and move along it to detect anomalies. |
6. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Waqar, A.; Othman, I.; Shafiq, N.; Mansoor, M.S. Evaluating the critical safety factors causing accidents in downstream oil and gas construction projects in Malaysia. Ain Shams Eng. J. 2023, 102300. [Google Scholar] [CrossRef]
- Tang, K.H.D.; Md Dawal, S.Z.; Olugu, E.U. A review of the offshore oil and gas safety indices. Saf. Sci. 2018, 109, 344–352. [Google Scholar] [CrossRef]
- Angulo, Á.; Tang, J.; Khadimallah, A.; Soua, S.; Mares, C.; Gan, T. Acoustic emission monitoring of fatigue crack growth in mooring chains. Appl. Sci. 2019, 9, 2187. [Google Scholar] [CrossRef]
- Goyet, J.; Straub, D.; Faber, M. Risk-based inspection planning of offshore installations. Struct. Eng. Int. 2002, 12, 200–208. [Google Scholar] [CrossRef]
- Ma, K.; Shu, H.; Smedley, P.; L’Hostis, D.; Duggal, A. A historical review on integrity issues of permanent mooring systems. In Proceedings of the Offshore Technology Conference (OTC), Houston, TX, USA, 6–9 May 2013. [Google Scholar] [CrossRef]
- Feijóo, M.; Zambrano, Y.; Vidal, Y.; Tutivén, C. Unsupervised damage detection for offshore jacket wind turbine foundations based on an autoencoder neural network. Sensors 2021, 21, 3333. [Google Scholar] [CrossRef]
- Sørensen, J. Framework for risk-based planning of operation and maintenance for offshore wind turbines. Wind Energy 2009, 12, 493–506. [Google Scholar] [CrossRef]
- Lian, J.; Cai, O.; Dong, X.; Jiang, Q.; Zhao, Y. Health monitoring and safety evaluation of the offshore wind turbine structure: A review and discussion of future development. Sustainability 2019, 11, 494. [Google Scholar] [CrossRef]
- Kotp, M.; Hassan, W.; Mohamed, A.; Ahmed, A. Ensure the integrity of offshore risers at the splash zone area & optimize their external inspection regime. Port-Said Eng. Res. J. 2017, 21, 250–260. [Google Scholar] [CrossRef]
- Papatzimos, A.; Dawood, T.; Thies, P. Cost-effective risk-based inspection planning for offshore wind farms. Insight Non-Destr. Test. Cond. Monit. 2018, 60, 299–305. [Google Scholar] [CrossRef]
- Santos, W.R.D. A Importância da Inspeção em Dutos Submarinos na Prevenção de Riscos Ambientais em Águas Oceânicas. In Proceedings of the Congresso Técnico Científico da Engenharia e da Agronomia—CONTECC’2016, CONFEA, Foz do Iguaçu, Brazil, 29 August–1 September 2016. [Google Scholar]
- Sharp, J.V.; Ersdal, G. Underwater Inspection and Repair for Offshore Structures; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- Bond, T.; Prince, J.; McLean, D.L.; Partridge, J.C. Comparing the utility of industry rov and hybrid-auv imagery for surveys of fish along a subsea pipeline. Mar. Technol. Soc. J. 2020, 54, 33–42. [Google Scholar] [CrossRef]
- Jones, D.O.; Gates, A.R.; Huvenne, V.A.; Phillips, A.B.; Bett, B.J. Autonomous marine environmental monitoring: Application in decommissioned oil fields. Sci. Total Environ. 2019, 668, 835–853. [Google Scholar] [CrossRef] [PubMed]
- Sverdrup-Thygeson, J.; Kelasidi, E.; Pettersen, K.; Gravdahl, J. Modeling of underwater swimming manipulators. Ifac-Papersonline 2016, 49, 81–88. [Google Scholar] [CrossRef]
- He, Y.; Wang, D.W.; Ali, Z. A review of different designs and control models of remotely operated underwater vehicle. Meas. Control 2020, 53, 1561–1570. [Google Scholar] [CrossRef]
- Hover, F.; Eustice, R.; Kim, A.; Englot, B.; Johannsson, H.; Kaess, M.; Leonard, J. Advanced perception, navigation and planning for autonomous in-water ship hull inspection. Int. J. Robot. Res. 2012, 31, 1445–1464. [Google Scholar] [CrossRef]
- Fernández-Avilés, F.; Papaelias, M.; Márquez, F.P.G. Autonomous underwater vehicles: Instrumentation and measurements. IEEE Instrum. Meas. Mag. 2020, 23, 105–114. [Google Scholar] [CrossRef]
- Gorma, W.; Post, M.; White, J.; Gardner, J.; Kim, J.; Mitchell, P.; Morozs, N.; Wright, M.; Xiao, Q. Development of modular bio-inspired autonomous underwater vehicle for close subsea asset inspection. Appl. Sci. 2021, 11, 5401. [Google Scholar] [CrossRef]
- Jung, J.; Lee, Y.; Park, J.; Yeu, T. Multi-modal sonar mapping of offshore cable lines with an autonomous surface vehicle. J. Mar. Sci. Eng. 2022, 10, 361. [Google Scholar] [CrossRef]
- Campos, D.; Matos, A.; Pinto, A. Modular multi-domain aware autonomous surface vehicle for inspection. IEEE Access 2022, 10, 113355–113375. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Felski, A.; Zwolak, K. The ocean-going autonomous ship—Challenges and threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- Sayed, M.; Roberts, J.; McKenzie, R.; Aracri, S.; Buchoux, A.; Stokes, A. Limpet ii: A modular, untethered soft robot. Soft Robot. 2021, 8, 319–339. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, H.; La, H.; Gucunski, N. Review of non-destructive civil infrastructure evaluation for bridges: State-of-the-art robotic platforms, sensors and algorithms. Sensors 2020, 20, 3954. [Google Scholar] [CrossRef] [PubMed]
- Myeong, W.; Myung, H. Development of a wall-climbing drone capable of vertical soft landing using a tilt-rotor mechanism. IEEE Access 2019, 7, 4868–4879. [Google Scholar] [CrossRef]
- Chemisky, B.; Menna, F.; Nocerino, E.; Drap, P. Underwater Survey for Oil and Gas Industry: A Review of Close Range Optical Methods. Remote Sens. 2021, 13, 2789. [Google Scholar] [CrossRef]
- DNV. DNV-RP-F116 Integrity Management of Submarine Pipeline Systems. Rules, Det Norske Veritas (DNV), Oslo, Norway, 2017. Available online: https://www.dnv.com/oilgas/download/dnv-rp-f116-integrity-management-of-submarine-pipeline-systems.html (accessed on 15 August 2023).
- Sylvester, J.; Nwosi-Anele, A.S.; Ehirim, E.O. Cost control in offshore oil and gas operations. In Proceedings of the SPE Nigeria Annual International Conference and Exhibition, Lagos, Nigeria, 1–3 August 2022. [Google Scholar] [CrossRef]
- Varela, G. Cost–benefit assessment of offshore structures considering structural deterioration. J. Mar. Sci. Eng. 2023, 11, 1348. [Google Scholar] [CrossRef]
- Moan, T. Integrity management of offshore structures with emphasis on design for structural damage tolerance. J. Offshore Mech. Arct. Eng. 2020, 142, 031104. [Google Scholar] [CrossRef]
- Sands, T.D. Development of deterministic artificial intelligence for unmanned underwater vehicles (uuv). J. Mar. Sci. Eng. 2020, 8, 578. [Google Scholar] [CrossRef]
- Lee, M.R.; Chen, Y. Artificial intelligence based object detection and tracking for a small underwater robot. Processes 2023, 11, 312. [Google Scholar] [CrossRef]
- Liniger, J.; Jensen, A.L.; Pedersen, S.; Sørensen, H.; Mai, C. On the Autonomous Inspection and Classification of Marine Growth on Subsea Structures. In Proceedings of the OCEANS 2022, Chennai, India, 21–24 February 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Spahić, R.; Poolla, K.; Hepsø, V.; Lundteigen, M.A. Image-based and risk-informed detection of subsea pipeline damage. Discov. Artif. Intell. 2023, 3, 23. [Google Scholar] [CrossRef]
- Sarker, B.R.; Faiz, T.I. Minimizing maintenance cost for offshore wind turbines following multi-level opportunistic preventive strategy. Renew. Energy 2016, 85, 104–113. [Google Scholar] [CrossRef]
- DNV. DNV-RP-F206 Riser Integrity Management. Rules, Det Norske Veritas (DNV), Oslo, Norway, 2019. Available online: https://www.dnv.com/oilgas/download/dnv-rp-f206-riser-integrity-management.html (accessed on 15 August 2023).
- Amaechi, C.V.; Reda, A.; Butler, H.O.; Ja’e, I.A.; An, C. Review on Fixed and Floating Offshore Structures. Part II: Sustainable Design Approaches and Project Management. J. Mar. Sci. Eng. 2022, 10, 973. [Google Scholar] [CrossRef]
- Moan, T. Life Cycle Structural Integrity Management of Offshore Structures. Struct. Infrastruct. Eng. 2018, 14, 911–927. [Google Scholar] [CrossRef]
- Zhu, J. Review on Structural Health Monitoring of Offshore Platform. J. Phys. Conf. Ser. 2021, 2014, 012019. [Google Scholar] [CrossRef]
- PETROBRAS. PETROBRAS N-1487 Inspeção de Dutos Rígidos Submarinos; Rules; PETROBRAS: Rio de Janeiro, Brazil, 2006. [Google Scholar]
- de Souza, A.P.F.; de Souza, M.I.L.; Netto, T.A.; Brandão, G.; Estefen, S.; Rubi, V.; Vilardo, G.P.; Procaci, M. Técnicas de Inspeção de Sistemas Submarinos—Uma Visão Geral Para Uma Implementação Ideal de Inspeção Baseada em Risco (IBR). In Proceedings of the 8th International Congress on Waterborne Transportation, Shipbuilding and Offshore Constructions Proceedings, Campinas, Galoá, Rio de Janeiro, Brazil, 26 October 2020. [Google Scholar] [CrossRef]
- Kneipp, R.B. O Estado da Arte na Utilização de Drones para Inspeção Naval e Offshore; Undergaduate Project; Federal University of Rio de Janeiro: Rio de Janeiro, Brazil, 2018. [Google Scholar]
- dos Santos, N.F.G. Inspeção Estrutural Utilizando Drones; Undergaduate project; Federal University of Rio de Janeiro: Rio de Janeiro, Brazil, 2023. [Google Scholar]
- Kabbabe Poleo, K.; Crowther, W.J.; Barnes, M. Estimating the impact of drone-based inspection on the Levelised Cost of electricity for offshore wind farms. Results Eng. 2021, 9, 100201. [Google Scholar] [CrossRef]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics—A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Frederiksen, M.H.; Knudsen, M.P. Drones for Offshore and Maritime Missions: Opportunities and Barriers; Reseach Project; University of Southern Denmark (SDU), Center for Integrative Innovation Management: Odense, Denmark, 2018. [Google Scholar]
- Agata, K.G. The use of drones in the maritime sector—Areas and benefits. Sci. J. Marit. Univ. Szczecin, Zesz. Nauk. Akad. Morska Szczecinie 2021, 67, 16–25. [Google Scholar] [CrossRef]
- Poggi, L.; Gaggero, T.; Gaiotti, M.; Ravina, E.; Rizzo, C.M. Recent developments in remote inspections of ship structures. Int. J. Nav. Archit. Ocean. Eng. 2020, 12, 881–891. [Google Scholar] [CrossRef]
- Stensrud, E. ADRASSO. Autonomous Drone-Based Surveys of Ships in Operation; Technical Report; Det Norske Veritas (DNV): Oslo, Norway, 2018. [Google Scholar]
- Indoor Inspection Drone for Industrial Spaces. Available online: https://www.scoutdi.com/scout-137-drone-system/ (accessed on 1 August 2023).
- Get Ready for a New Era of Internal Inspection and Mapping. Available online: https://www.flyability.com/elios-3 (accessed on 1 August 2023).
- Robert Christ, R.W. The ROV Manual; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Capocci, R.; Dooly, G.; Omerdić, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-Class Remotely Operated Vehicles—A Review. J. Mar. Sci. Eng. 2017, 5, 13. [Google Scholar] [CrossRef]
- Carvalho, A.; Sagrilo, L.; Silva, I.; Rebello, J.; Carneval, R. On the reliability of an automated ultrasonic system for hull inspection in ship-based oil production units. Appl. Ocean. Res. 2003, 25, 235–241. [Google Scholar] [CrossRef]
- Zeng, Y.; Wang, X.; Qin, X.; Hua, L.; Xu, M. Laser Ultrasonic inspection of a Wire + Arc Additive Manufactured (WAAM) sample with artificial defects. Ultrasonics 2021, 110, 106273. [Google Scholar] [CrossRef]
- Soliman, M.; Frangopol, D.M.; Mondoro, A. A probabilistic approach for optimizing inspection, monitoring, and maintenance actions against fatigue of critical ship details. Struct. Saf. 2016, 60, 91–101. [Google Scholar] [CrossRef]
- Liu, X.; Guo, Z.; Bai, D.; Yuan, C. Study on the mechanical properties and defect detection of low alloy steel weldments for large cruise ships. Ocean. Eng. 2022, 258, 111815. [Google Scholar] [CrossRef]
- Sahadan, S.N.; Abdullah, S.; Arifin, A.; Singh, S.S.K. Assessing the magnetic flux leakage contraction parameters for the fatigue life prediction of SAE1045 steel specimens. Structures 2021, 34, 4077–4085. [Google Scholar] [CrossRef]
- Mandache, C.; Clapham, L. A model for magnetic flux leakage signal predictions. J. Phys. D Appl. Phys. 2003, 36, 2427. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, C.; Li, R.; Cai, M.; Jia, G. Theory and Application of Magnetic Flux Leakage Pipeline Detection. Sensors 2015, 15, 31036–31055. [Google Scholar] [CrossRef]
- Angelo, J.; Bennecer, A.; Picton, P.; Kaczmarczyk, S.; Soares, A. Eddy current analysis of shipped stainless steel heat exchanger bundle. Case Stud. Nondestruct. Test. Eval. 2016, 6, 89–93. [Google Scholar] [CrossRef][Green Version]
- RIZZO, C.M. 13 - Inspection of aged ships and offshore structures. In Condition Assessment of Aged Structures; Paik, J., Melchers, R., Eds.; Woodhead Publishing Series in Civil and Structural Engineering; Woodhead Publishing: Boston, MA, USA, 2008; pp. 367–406. [Google Scholar] [CrossRef]
- Tang, R.; Zhang, S.; Wu, W.; Zhang, S.; Han, Z. Explainable deep learning based ultrasonic guided wave pipe crack identification method. Measurement 2023, 206, 112277. [Google Scholar] [CrossRef]
- Zakowski, K.; Iglinski, P.; Orlikowski, J.; Darowicki, K.; Domanska, K. Modernized cathodic protection system for legs of the production rig—Evaluation during ten years of service. Ocean Eng. 2020, 218, 108074. [Google Scholar] [CrossRef]
- Britton, J.; Taylor, M.L. 25—Advancements in Cathodic Protection of offshore structures. In Trends in Oil and Gas Corrosion Research and Technologies; El-Sherik, A., Ed.; Woodhead Publishing Series in Energy; Woodhead Publishing: Boston, MA, USA, 2017; pp. 593–612. [Google Scholar] [CrossRef]
- U.S. Department of Transportation’s Pipeline and Hazardous Materials Safety Administration (PHMSA). Fact Sheet: In-Line Inspections (Smart Pig). Technical Report, 2011. Available online: https://primis.phmsa.dot.gov/comm/factsheets/fssmartpig.htm (accessed on 29 June 2023).
- Shukla, A.; Karki, H. A review of robotics in onshore oil-gas industry. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 1153–1160. [Google Scholar] [CrossRef]
- Diaz Ledezma, F.; Amer, A.; Abdellatif, F.; Outa, A.; Trigui, H.; Patel, S.; Binyahib, R. A Market Survey of Offshore Underwater Robotic Inspection Technologies for the Oil and Gas Industry. In SPE Kingdom of Saudi Arabia Annual Technical Symposium and Exhibition; Society of Petroleum Engineers (SPE): Houston, TX, USA, 2015. [Google Scholar] [CrossRef]
- Seaeye, S. Saab Seaeye Products. Technical Report. 2014. Available online: https://www.saabseaeye.com/ (accessed on 29 June 2023).
- Institute, M. Holland I Deepwater ROV—Remotely Operated Vehicle. Technical Report. 2014. Available online: https://www.eurofleets.eu/vessel/rov-holland-i/ (accessed on 29 June 2023).
- Ltd, F.S.S. FCV 2000 – Next Generation Work Class ROV. Technical Report, 2014. Available online: https://issuu.com/fugrorue/docs/fcv2000 (accessed on 29 June 2023).
- Videoray Pro 4. Technical Report, 2023. Available online: https://videoray.com/products/pro-4/ (accessed on 29 June 2023).
- Xu, H.; Li, G.; Liu, J. Reliability analysis of an autonomous underwater vehicle using fault tree. In Proceedings of the 2013 IEEE International Conference on Information and Automation (ICIA), Yinchuan, China, 26–28 August 2013; pp. 1165–1170. [Google Scholar] [CrossRef]
- Oceaneering. Neptune ROV. Technical Report. 2013. Available online: https://www.oceaneering.com/brochures/33341-2 (accessed on 29 June 2023).
- Inspection in the Splash Zone. Available online: https://oceantech.no/inspection/ (accessed on 1 August 2023).
- Palomer, A.; Ridao, P.; Ribas, D. Inspection of an underwater structure using point-cloud SLAM with an AUV and a laser scanner. J. Field Robot. 2019, 36, 1333–1344. [Google Scholar] [CrossRef]
- Freitas, A.; Alvarez, A.; Ramos, R.; Barros, E. Buckling analysis of an auv pressure vessel with sliding stiffeners. J. Mar. Sci. Eng. 2020, 8, 515. [Google Scholar] [CrossRef]
- Sayed, M.; Nemitz, M.; Aracri, S.; McConnell, A.; McKenzie, R.; Stokes, A. The limpet: A ros-enabled multi-sensing platform for the orca hub. Sensors 2018, 18, 3487. [Google Scholar] [CrossRef] [PubMed]
- Hernández, J.; Istenic, K.; Gracias, N.; Palomeras, N.; Campos, R.; Vidal, E.; García, R.; Carreras, M. Autonomous underwater navigation and optical mapping in unknown natural environments. Sensors 2016, 16, 1174. [Google Scholar] [CrossRef]
- Kaur, A.; Corsar, M.; Ma, B. Application of fieldbus technology to enable enhanced actuator control of automated inspection for offshore structures. Appl. Syst. Innov. 2019, 2, 29. [Google Scholar] [CrossRef]
- Xiang, X.; Yu, C.; Niu, Z.; Zhang, Q. Subsea cable tracking by autonomous underwater vehicle with magnetic sensing guidance. Sensors 2016, 16, 1335. [Google Scholar] [CrossRef] [PubMed]
- Panda, J.; Mitra, A.; Warrior, H. A review on the hydrodynamic characteristics of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2020, 235, 15–29. [Google Scholar] [CrossRef]
- Okoro, H.; Orifama, D. Robotization of operations in the petroleum industry. Int. J. Ind. Manuf. Syst. Eng. 2019, 4, 48. [Google Scholar] [CrossRef]
- Thomas, C.; Simetti, E.; Casalino, G. A unifying task priority approach for autonomous underwater vehicles integrating homing and docking maneuvers. J. Mar. Sci. Eng. 2021, 9, 162. [Google Scholar] [CrossRef]
- Liu, T.; Hu, Y.; Xu, H.; Ghami, M. Investigation of an underwater vectored thruster based on 3rps parallel manipulator. Math. Probl. Eng. 2020, 2020, 9287241. [Google Scholar] [CrossRef]
- Zhou, D.; Yu, Y.; Wang, J.; Li, Z. Design and validation of a fast wireless low-frequency vibration inspection system for offshore platform structures. J. Low Freq. Noise Vib. Act. Control 2019, 39, 720–728. [Google Scholar] [CrossRef]
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous Underwater Vehicle navigation: A review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Li, J.; Kaess, M.; Eustice, R.M.; Johnson-Roberson, M. Pose-Graph SLAM Using Forward-Looking Sonar. IEEE Robot. Autom. Lett. 2018, 3, 2330–2337. [Google Scholar] [CrossRef]
- Jaffre, F.; Littlefield, R.; Grund, M.; Purcell, M. Development of a New Version of the REMUS 6000 Autonomous Underwater Vehicle. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Jalving, B.; Gade, K.; Hagen, O.; Vestgard, K. A toolbox of aiding techniques for the hugin auv integrated inertial navigation system. Model. Identif. Control Nor. Res. Bull. 2004, 25, 173–190. [Google Scholar] [CrossRef]
- Betz, J. Advances needed to untether auvs from support vessels. J. Pet. Technol. 2015, 67, 50–51. [Google Scholar] [CrossRef]
- Liu, F.; Long, Y.; Luo, J.; Pu, H.; Duan, C.; Zhong, S. Active fault localization of actuators on torpedo-shaped autonomous underwater vehicles. Sensors 2021, 21, 476. [Google Scholar] [CrossRef] [PubMed]
- HUGIN Endurance Autonomous Underwater Vehicle (AUV). Available online: https://www.naval-technology.com/projects/hugin-endurance-autonomous-underwater-vehicle-auv/ (accessed on 1 September 2023).
- HUGIN ENDURANCE AUV. Available online: https://bit.ly/45CxJ8l (accessed on 1 September 2023).
- REMUS UUVS. Available online: https://hii.com/what-we-do/capabilities/unmanned-systems/remus-uuvs/ (accessed on 1 September 2023).
- Mousazadeh, H.; Hamid, J.; Elham, O.; Farshid, M.; Ali, K.; Yousef, S.Z.; Ashkan, M. Experimental evaluation of a hydrography surface vehicle in four navigation modes. J. Ocean. Eng. Sci. 2017, 2, 127–136. [Google Scholar] [CrossRef]
- Campos, D.F.; Pereira, M.; Matos, A.; Pinto, A.M. DIIUS—Distributed Perception for Inspection of Aquatic Structures. In Proceedings of the OCEANS 2021: San Diego—Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Khalid, O.; Hao, G.; Desmond, C.; Macdonald, H.; McAuliffe, F.D.; Dooly, G.; Hu, W. Applications of robotics in floating offshore wind farm operations and maintenance: Literature review and trends. Wind Energy 2022, 25, 1880–1899. [Google Scholar] [CrossRef]
- Mansor, H.; Norhisam, M.; Abidin, Z.; Gunawan, T. Autonomous surface vessel for search and rescue operation. Bull. Electr. Eng. Inform. 2021, 10, 1701–1708. [Google Scholar] [CrossRef]
- Cheong, S.; Kim, Y.; Chun, J.; Kim, J.; Huh, S. Integrated offshore seismic survey using an unmanned wave glider. Energies 2021, 14, 297. [Google Scholar] [CrossRef]
- Amiri, N.; Shaterabadi, M.; Kashyzadeh, K.; Chizari, M. A comprehensive review on design, monitoring, and failure in fixed offshore platforms. J. Mar. Sci. Eng. 2021, 9, 1349. [Google Scholar] [CrossRef]
- Amaechi, C.; Reda, A.; Kgosiemang, I.; Ja’e, I.; Oyetunji, A.; Olukolajo, M.; Igwe, I. Guidelines on asset management of offshore facilities for monitoring, sustainable maintenance, and safety practices. Sensors 2022, 22, 7270. [Google Scholar] [CrossRef]
- Yang, W.R.; Chen, C.Y.; Hsu, C.M.; Tseng, C.J.; Yang, W.C. Multifunctional Inshore Survey Platform with Unmanned Surface Vehicles. Int. J. Autom. Smart Technol. 2011, 1, 19–25. [Google Scholar] [CrossRef]
- Groves, K.; West, A.; Gornicki, K.; Watson, S.; Carrasco, J.; Lennox, B. MallARD: An Autonomous Aquatic Surface Vehicle for Inspection and Monitoring of Wet Nuclear Storage Facilities. Robotics 2019, 8, 47. [Google Scholar] [CrossRef]
- Leedekerken, J.C.; Fallon, M.F.; Leonard, J.J. Mapping Complex Marine Environments with Autonomous Surface Craft. In Experimental Robotics: The 12th International Symposium on Experimental Robotics; Khatib, O., Kumar, V., Sukhatme, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 525–539. [Google Scholar] [CrossRef]
- Papadopoulos, G.; Kurniawati, H.; Shariff, A.S.B.M.; Wong, L.J.; Patrikalakis, N.M. Experiments on Surface Reconstruction for Partially Submerged Marine Structures. J. Field Robot. 2014, 31, 225–244. [Google Scholar] [CrossRef]
- USV Tupan. Available online: https://www.tidewise.io/tecnologia-usv-tupan (accessed on 1 September 2023).
- Z-Boat 1800RP. Available online: https://www.teledynemarine.com/brands/oceanscience/z-boat1800rp (accessed on 1 September 2023).
- Zhao, C.; Thies, P.; Johanning, L. Offshore inspection mission modelling for an asv/rov system. Ocean Eng. 2022, 259, 111899. [Google Scholar] [CrossRef]
- Schjølberg, I.; Utne, I.B. Towards autonomy in ROV operations. IFAC-PapersOnLine 2015, 48, 183–188. [Google Scholar] [CrossRef]
- Danielis, P.; Parzyjegla, H.; Ali, M.A.M.; Torres, F.S. Simulation model for energy consumption and acoustic underwater communication of autonomous underwater vehicles. WMU J. Marit. Aff. 2021, 21, 89–107. [Google Scholar] [CrossRef]
- Palomeras, N.; Penalver, A.; Massot-Campos, M.; Negre, P.; Fernández, J.; Ridao, P.; Sanz, P.; Oliver, G. I-auv docking and panel intervention at sea. Sensors 2016, 16, 1673. [Google Scholar] [CrossRef]
- Nielsen, M.E.; Eidsvik, O.A.N.; Blanke, M.; Schjølberg, I. Constrained multi-body dynamics for modular underwater robots—Theory and experiments. Ocean Eng. 2018, 149, 358–372. [Google Scholar] [CrossRef]
- Sverdrup-Thygeson, J.; Kelasidi, E.; Pettersen, K.Y.; Gravdahl, J.T. The underwater swimming manipulator—A bioinspired solution for subsea operations. IEEE J. Ocean Eng. 2018, 43, 402–417. [Google Scholar] [CrossRef]
- Kamalahasan, M.; Raghu, T.; Swapna, B.; Saravanan, K.; Manjula, D. Renewable energy powered autonomous smart ocean surface vehicles (reasose). Int. J. Integr. Eng. 2022, 14, 1–5. [Google Scholar] [CrossRef]
- Bowker, J.; Tan, M.; Townsend, N. Axv: An autonomous vehicle concept capable of operating throughout the ocean space: Air, surface and subsea. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2023, 237, 918–928. [Google Scholar] [CrossRef]
- Ćwiąkała, P. Testing procedure of unmanned aerial vehicles (uavs) trajectory in automatic missions. Appl. Sci. 2019, 9, 3488. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Banaszak, Z.; Nielsen, P. A solution approach for uav fleet mission planning in changing weather conditions. Appl. Sci. 2019, 9, 3972. [Google Scholar] [CrossRef]
- Asadzadeh, S.; de Oliveira, W.J.; de Souza Filho, C.R. UAV-based remote sensing for the petroleum industry and environmental monitoring: State-of-the-art and perspectives. J. Pet. Sci. Eng. 2022, 208, 109633. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef]
- Wanasinghe, T.R.; Gosine, R.G.; De Silva, O.; Mann, G.K.I.; James, L.A.; Warrian, P. Unmanned Aerial Systems for the Oil and Gas Industry: Overview, Applications, and Challenges. IEEE Access 2020, 8, 166980–166997. [Google Scholar] [CrossRef]
- Trslic, P.; Omerdic, E.; Dooly, G.; Toal, D. Neuro-fuzzy dynamic position prediction for autonomous work-class rov docking. Sensors 2020, 20, 693. [Google Scholar] [CrossRef]
- Huang, J.; Choi, H.; Jung, D.; Lee, J.; Kim, M.; Choo, K.; Cho, H.; Jin, H. Design and motion simulation of an underwater glider in the vertical plane. Appl. Sci. 2021, 11, 8212. [Google Scholar] [CrossRef]
- Bernardi, M.; Hosking, B.; Petrioli, C.; Bett, B.; Jones, D.; Huvenne, V.; Marlow, R.; Furlong, M.; McPhail, S.; Munafo, A. Aurora, a multi-sensor dataset for robotic ocean exploration. Int. J. Robot. Res. 2022, 41, 461–469. [Google Scholar] [CrossRef]
- Vu, M.; Bui, D.; Bui, D.; Do, Q.; Lee, S.; Choi, H.; Choi, H. Study on dynamic behavior of unmanned surface vehicle-linked unmanned underwater vehicle system for underwater exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef]
- Hassanein, O.; Sreenatha, G.; Aboobacker, S.; Ali, S. Development of low cost autonomous underwater vehicle platform. Int. J. Smart Sens. Intell. Syst. 2021, 14, 1–22. [Google Scholar] [CrossRef]
- Toal, D.; Nolan, S.; Riordan, J.; Omerdic, E. A flexible, multi-mode of operation, high-resolution survey platform for surface and underwater operations. Underw. Technol. Int. J. Soc. Underw. 2009, 28, 159–174. [Google Scholar] [CrossRef]
- Gasparoto, H.; Chocron, O.; Benbouzid, M.; Meirelles, P. Advances in reconfigurable vectorial thrusters for adaptive underwater robots. J. Mar. Sci. Eng. 2021, 9, 170. [Google Scholar] [CrossRef]
- Anderlini, E.; Parker, G.; Thomas, G. Control of a rov carrying an object. Ocean Eng. 2018, 165, 307–318. [Google Scholar] [CrossRef]
- Eichhorn, M.; Ament, C.; Jacobi, M.; Pfuetzenreuter, T.; Karimanzira, D.; Bley, K.; Boer, M.; Wehde, H. Modular auv system with integrated real-time water quality analysis. Sensors 2018, 18, 1837. [Google Scholar] [CrossRef]







| Zone | Specific Element |
|---|---|
| 1 | Platform superstructure and top-side modules |
| 2, 3 | Riser balcony, I-tube, bend stiffener |
| 3, 4 | Rigid and flexible risers |
| 3, 4, 5 | Control lines and umbilicals |
| 3, 4 | Subsea structure |
| 2, 3, 4, 5 | Mooring system |
| 5 | Wellheads |
| 5 | Flowlines |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fun Sang Cepeda, M.; Freitas Machado, M.d.S.; Sousa Barbosa, F.H.; Santana Souza Moreira, D.; Legaz Almansa, M.J.; Lourenço de Souza, M.I.; Caprace, J.-D. Exploring Autonomous and Remotely Operated Vehicles in Offshore Structure Inspections. J. Mar. Sci. Eng. 2023, 11, 2172. https://doi.org/10.3390/jmse11112172
Fun Sang Cepeda M, Freitas Machado MdS, Sousa Barbosa FH, Santana Souza Moreira D, Legaz Almansa MJ, Lourenço de Souza MI, Caprace J-D. Exploring Autonomous and Remotely Operated Vehicles in Offshore Structure Inspections. Journal of Marine Science and Engineering. 2023; 11(11):2172. https://doi.org/10.3390/jmse11112172
Chicago/Turabian StyleFun Sang Cepeda, Maricruz, Marcos de Souza Freitas Machado, Fabrício Hudson Sousa Barbosa, Douglas Santana Souza Moreira, Maria José Legaz Almansa, Marcelo Igor Lourenço de Souza, and Jean-David Caprace. 2023. "Exploring Autonomous and Remotely Operated Vehicles in Offshore Structure Inspections" Journal of Marine Science and Engineering 11, no. 11: 2172. https://doi.org/10.3390/jmse11112172
APA StyleFun Sang Cepeda, M., Freitas Machado, M. d. S., Sousa Barbosa, F. H., Santana Souza Moreira, D., Legaz Almansa, M. J., Lourenço de Souza, M. I., & Caprace, J.-D. (2023). Exploring Autonomous and Remotely Operated Vehicles in Offshore Structure Inspections. Journal of Marine Science and Engineering, 11(11), 2172. https://doi.org/10.3390/jmse11112172