
Dynamic Responses of the Cylindrical Floating Drilling Production Storage and Offloading System with Annular Anti-Motion Structures under the Survival Sea Scenario


Abstract
1. Introduction
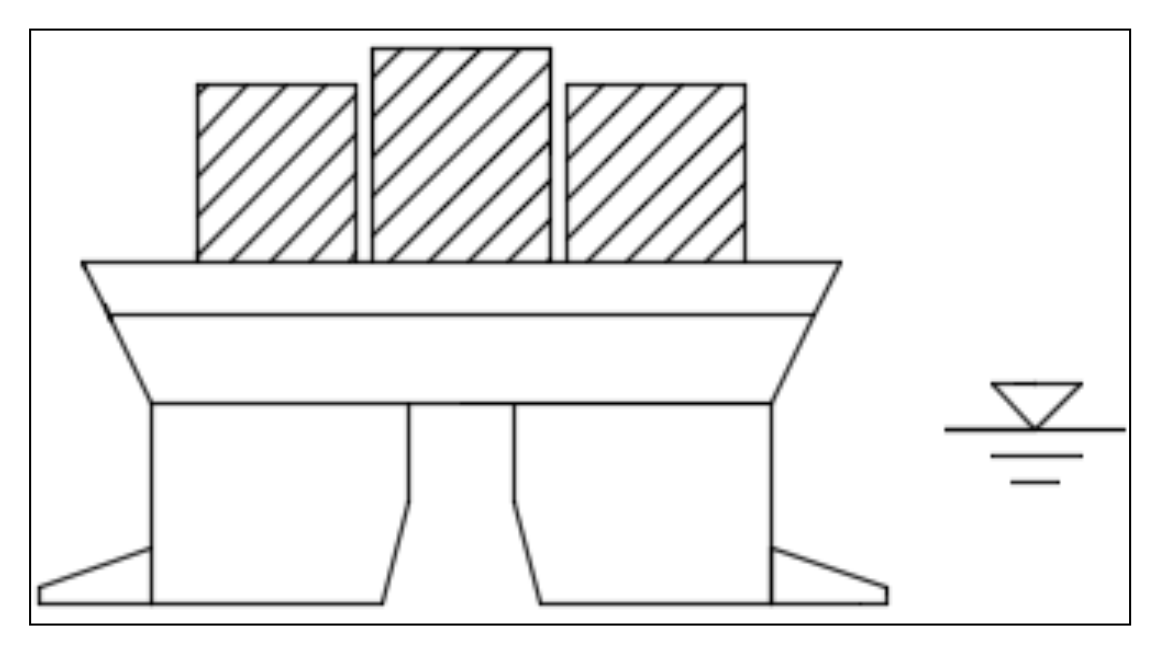
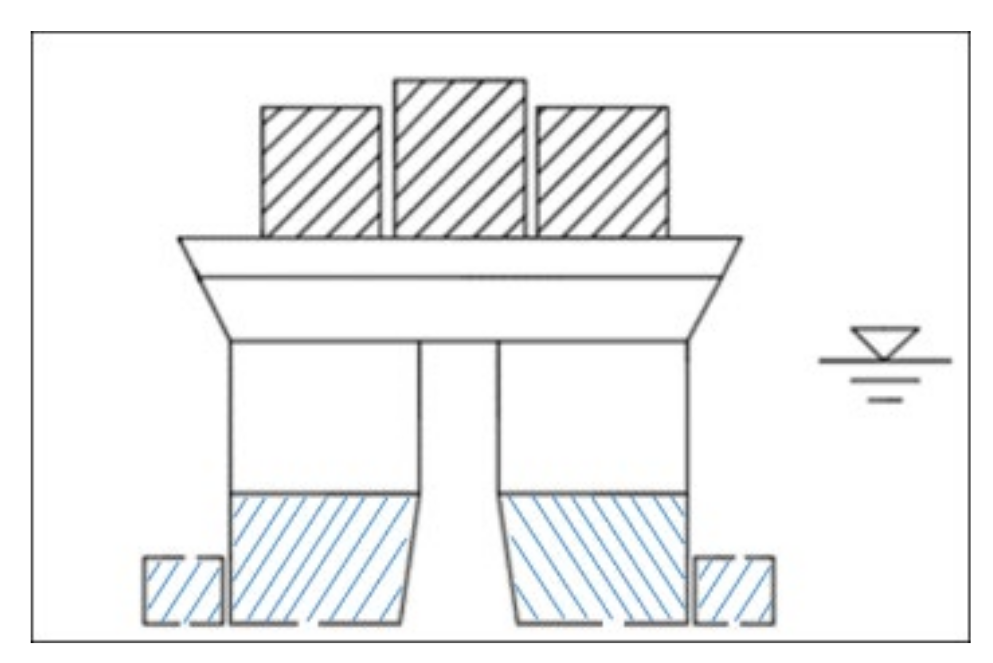
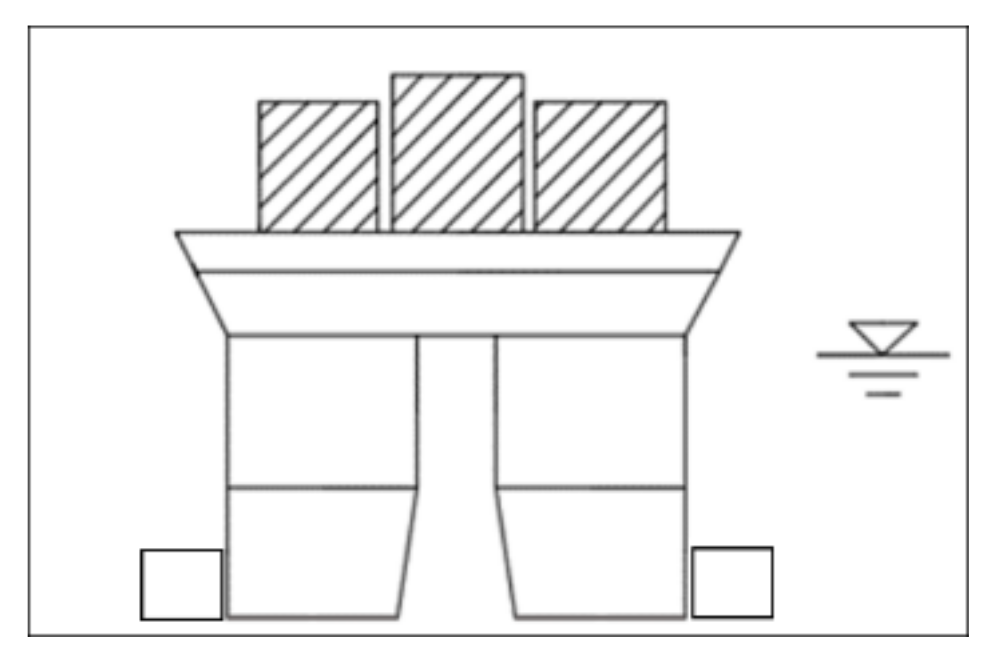
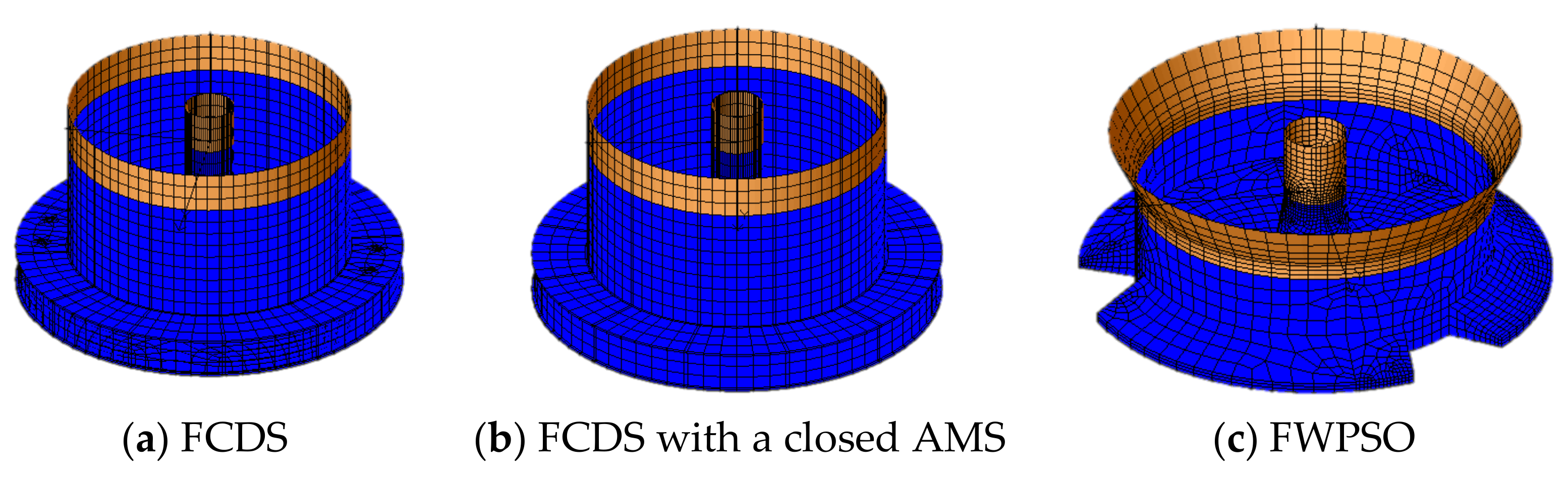
2. Physical Model Description
3. Methodology
3.1. Wave Loads
3.2. Wind Pressure Loads
3.3. Current Loads
3.4. Mooring Loads
3.5. Governing Equations of Buoy Motion
4. Results and Discussions
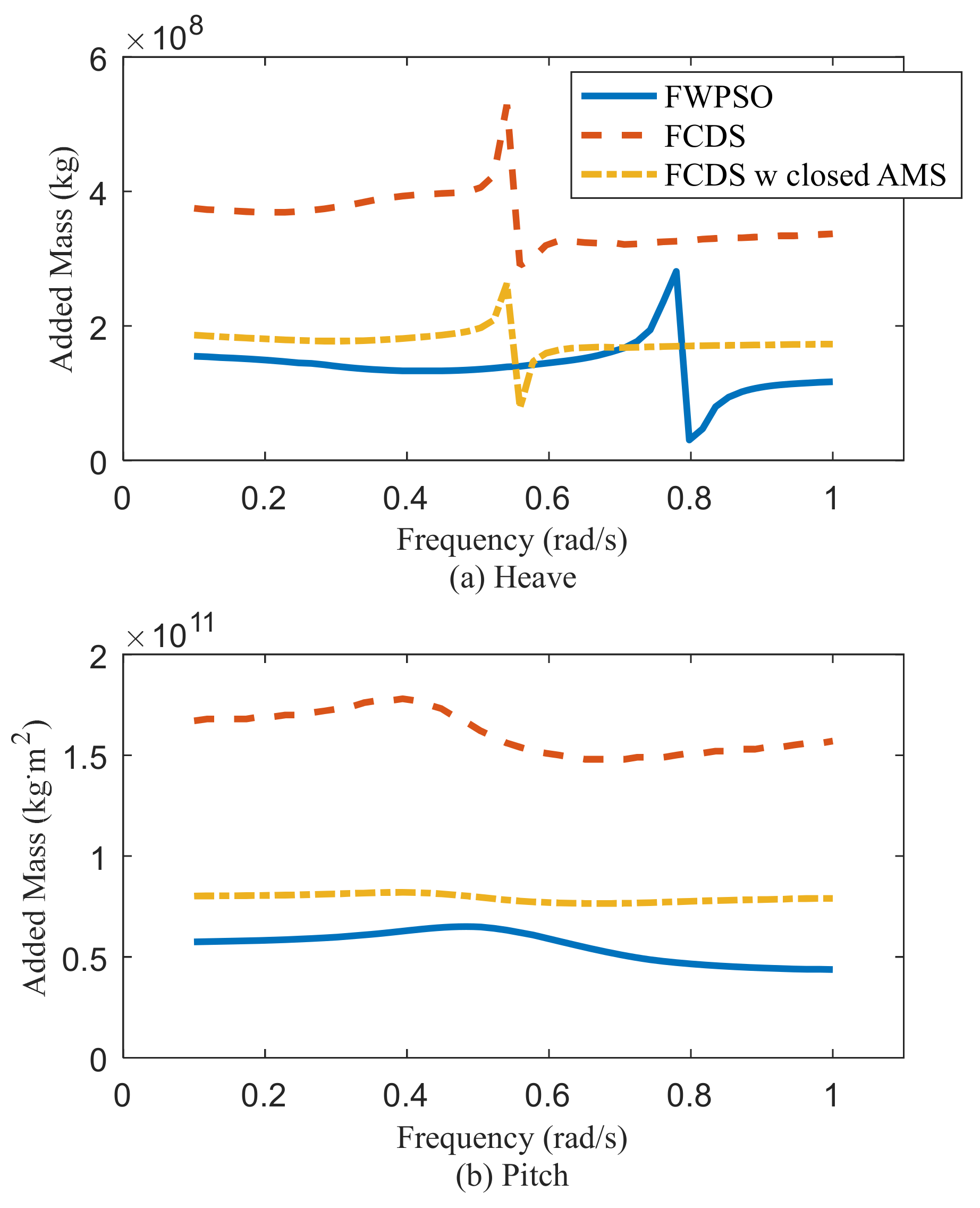
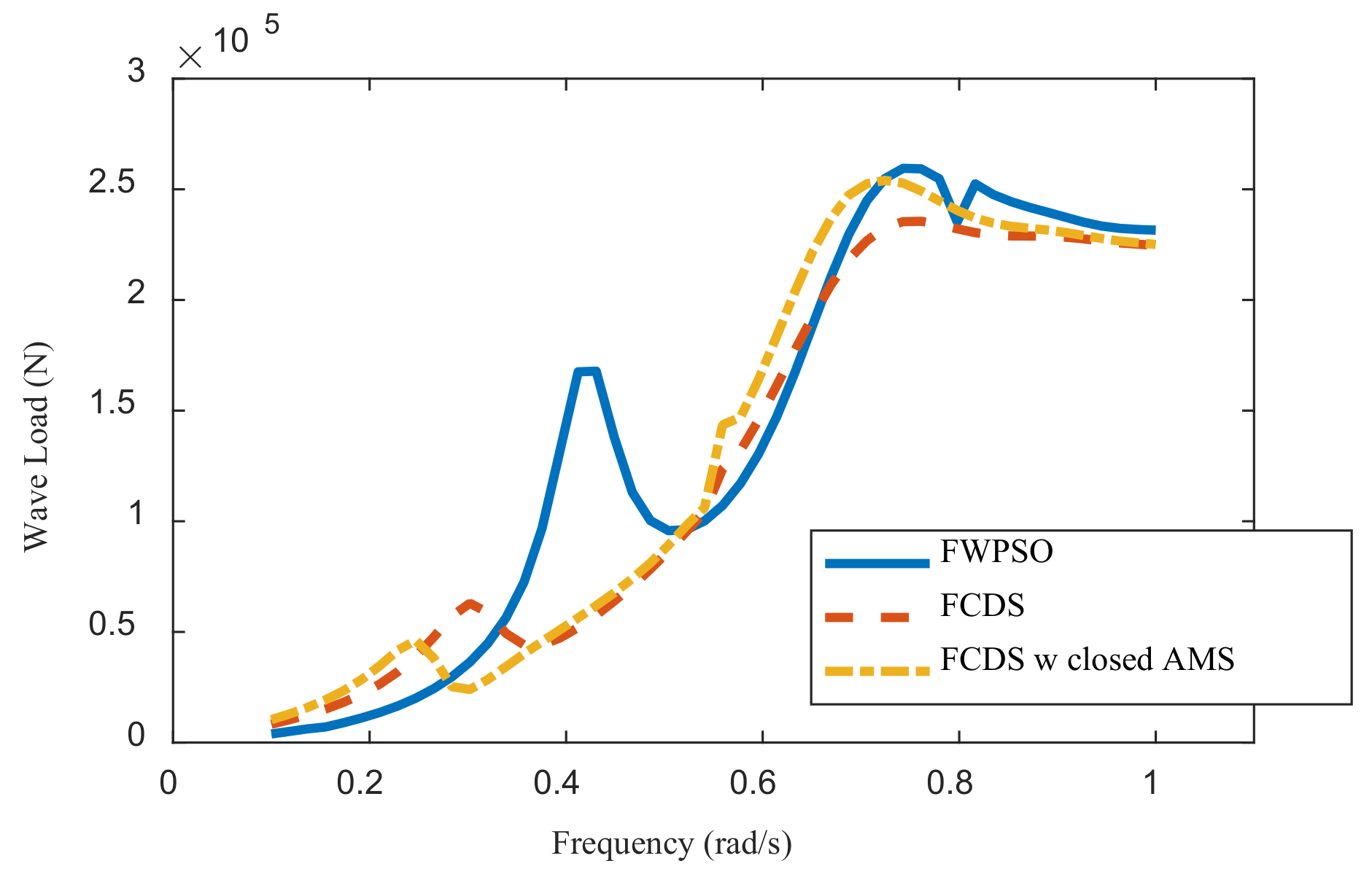
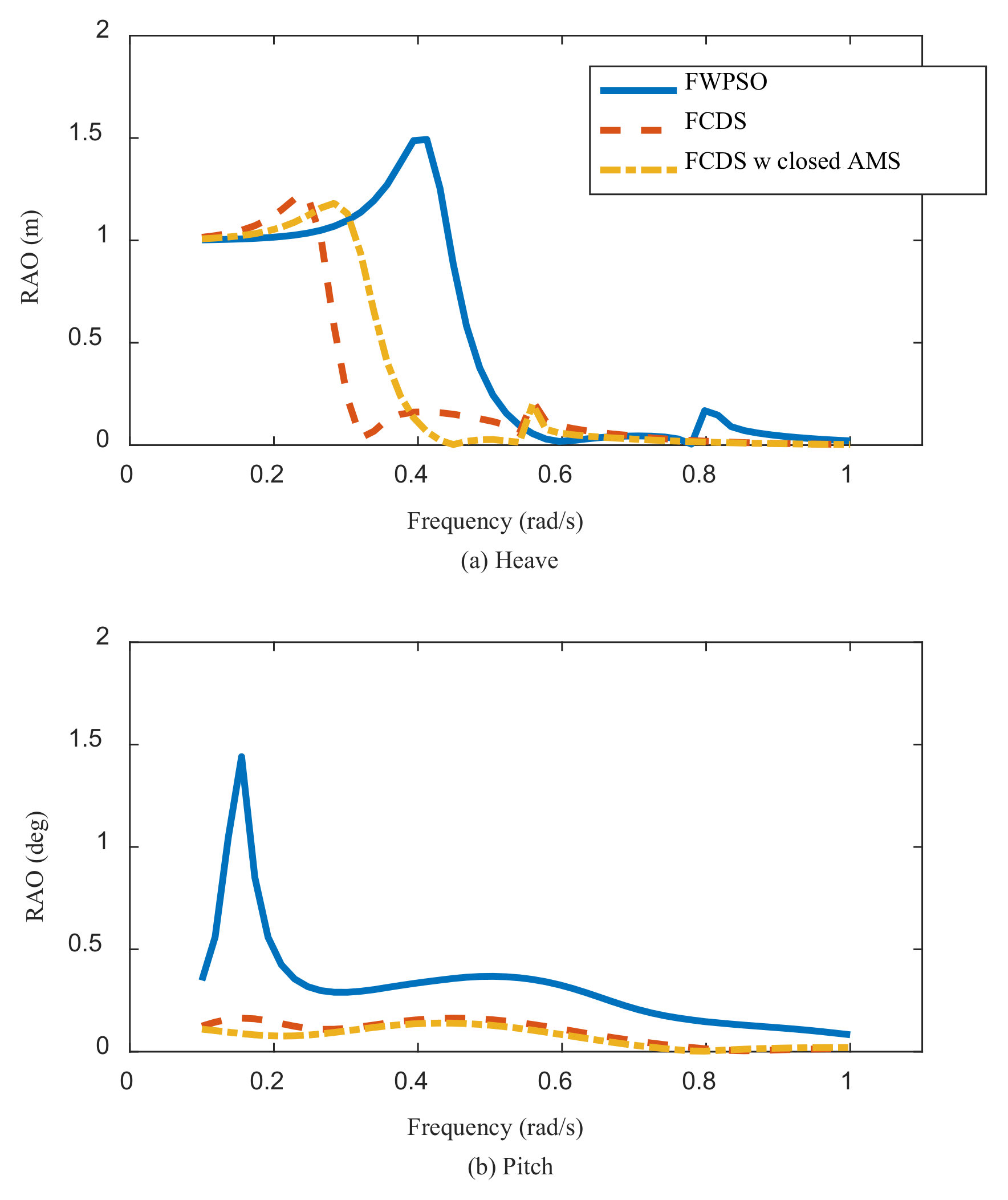
4.1. Hydrodynamic Response in the Frequency Domain
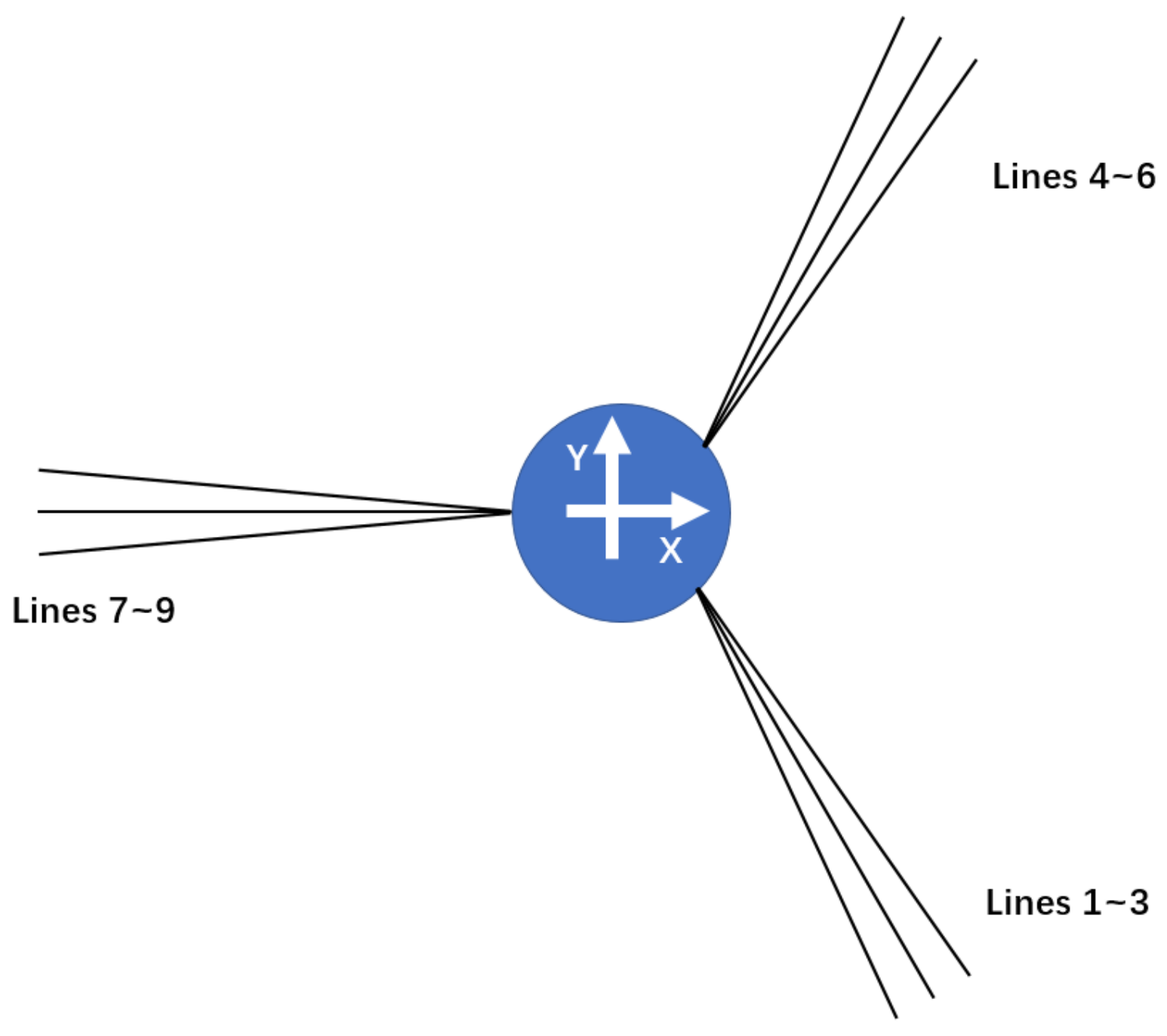
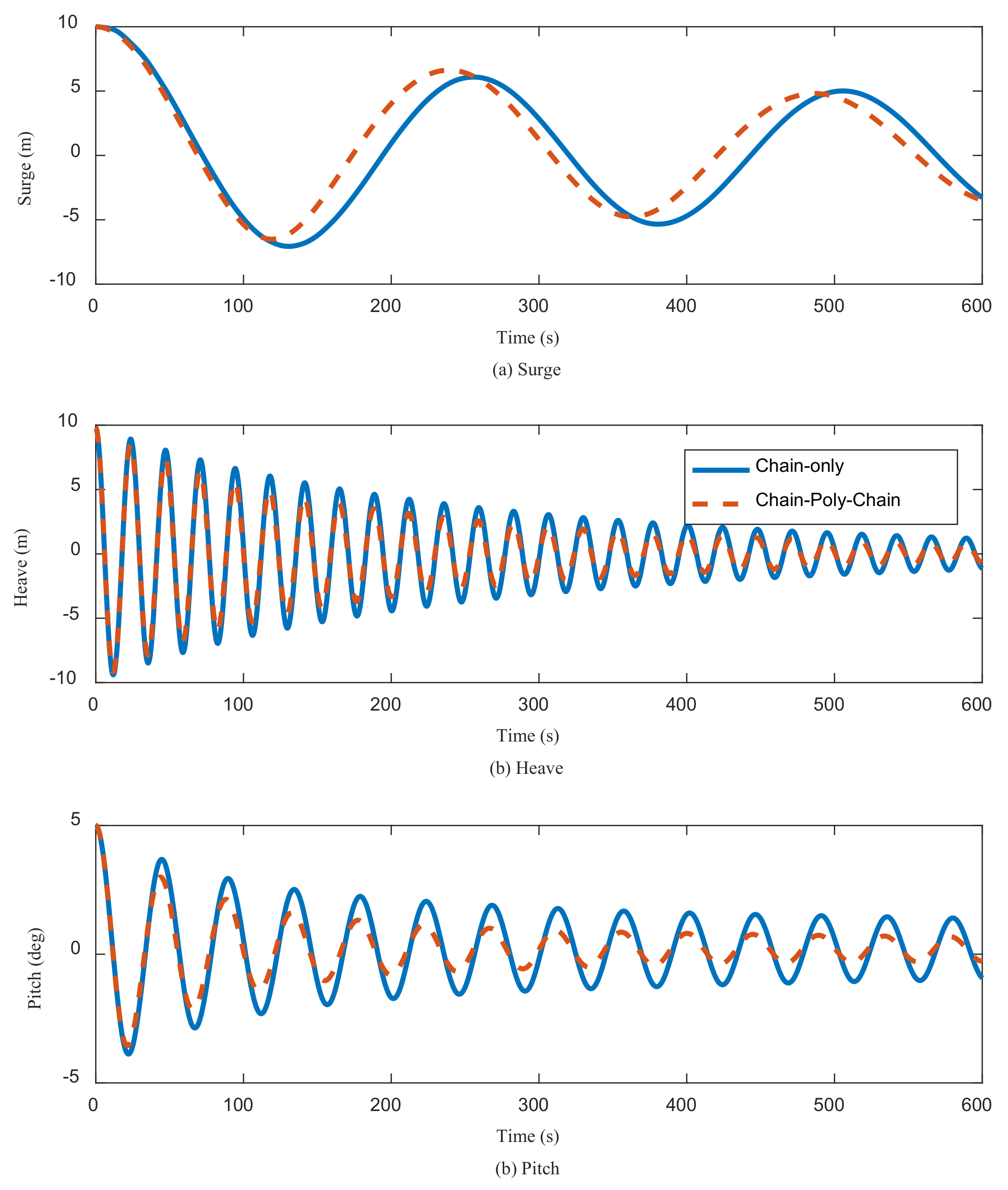
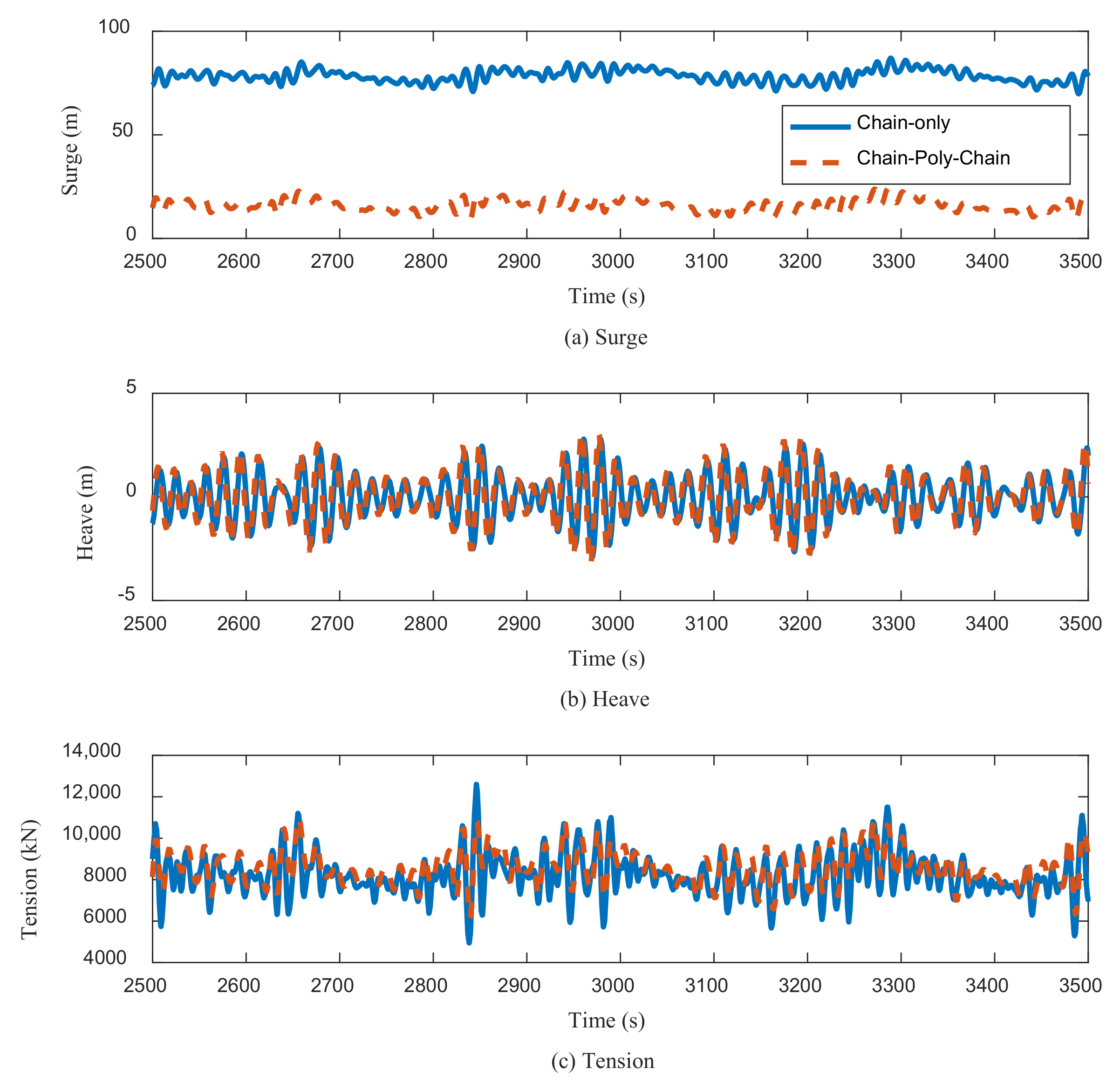
4.2. Mooring Configuration
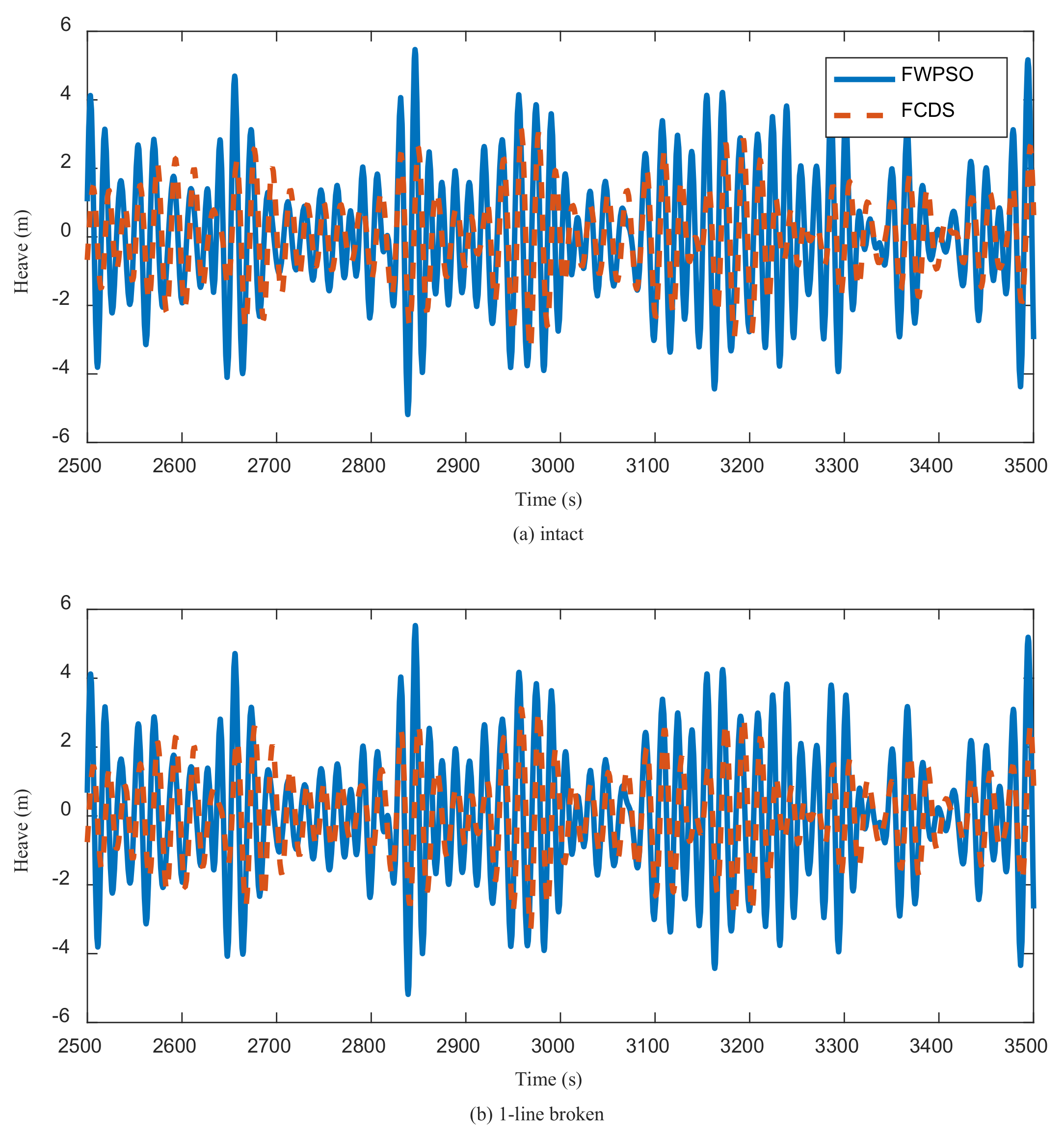
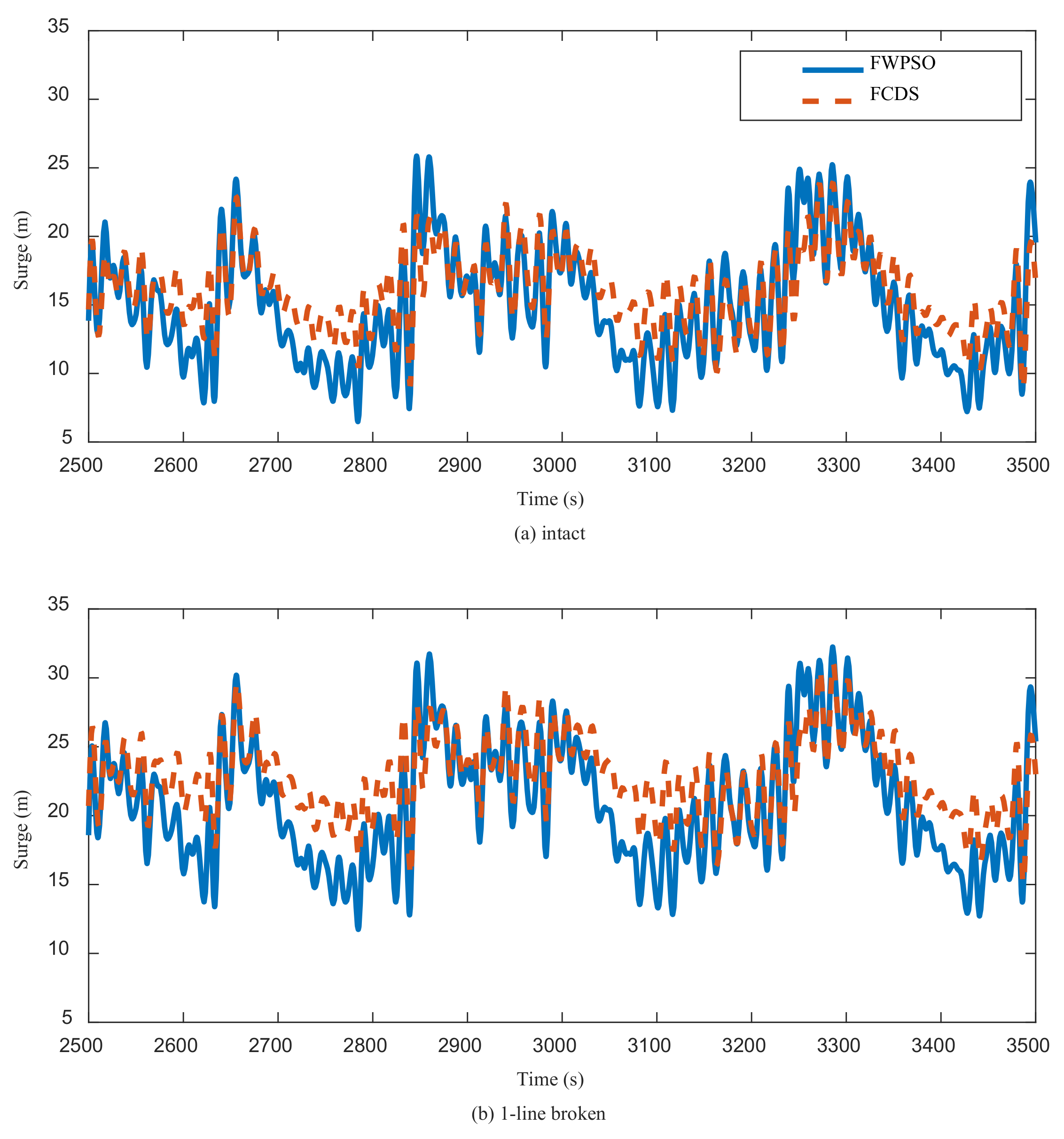
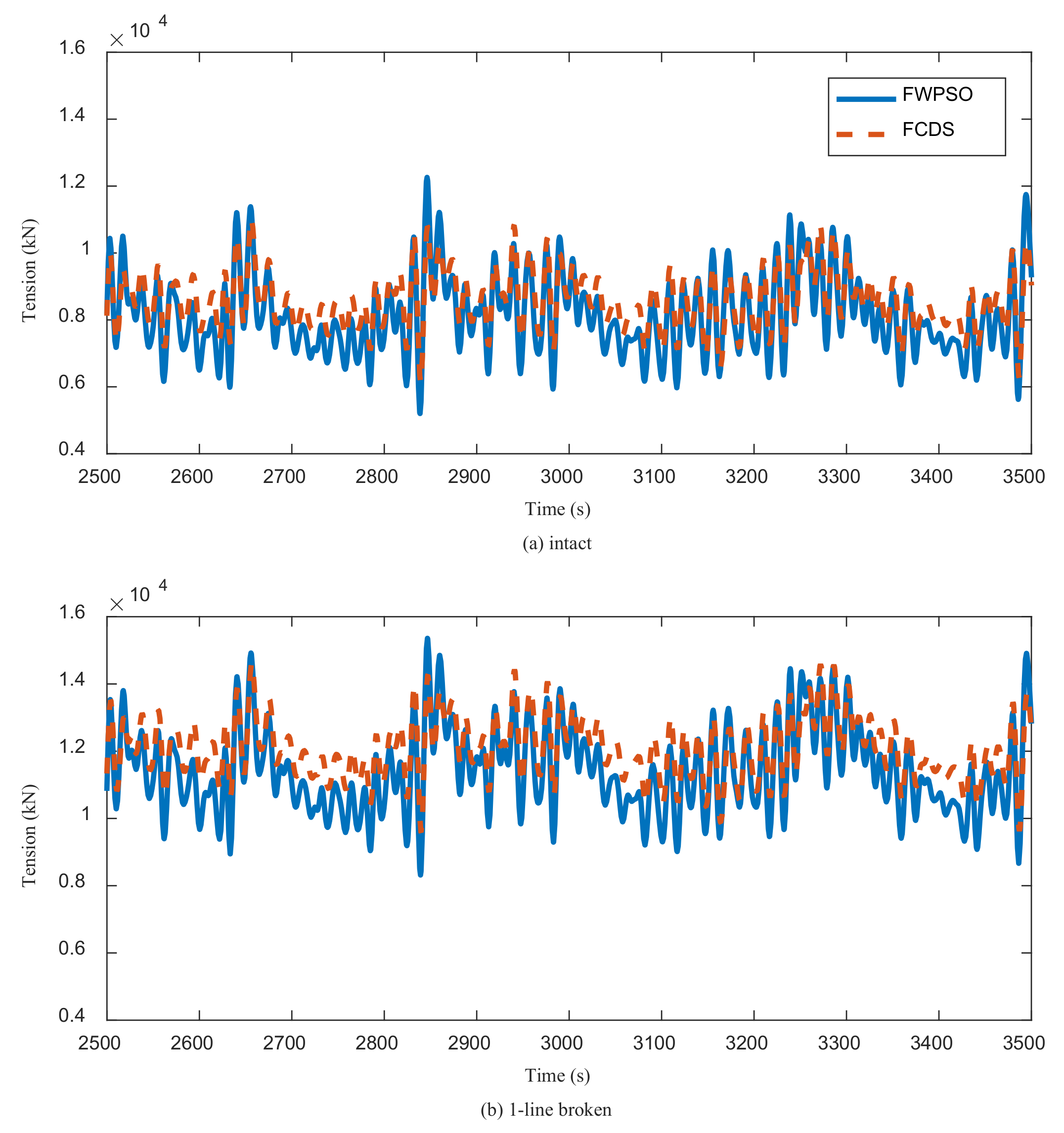
4.3. Dynamic Response between the FCDS and FWPSOs
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yacovitch, T.I.; Daube, C.; Herndon, S.C. Methane emissions from offshore oil and gas platforms in the Gulf of Mexico. Environ. Sci. Technol. 2020, 54, 3530–3538. [Google Scholar] [CrossRef] [PubMed]
- Kaiser, M.J. Offshore oil and gas records circa 2020. Ships Offshore Struct. 2020, 17, 205–241. [Google Scholar] [CrossRef]
- Lee, J.; Kim, B.C.; Ruy, W.S.; Han, I.S. Parametric optimization of FPSO hull dimensions for Brazil field using sophisticated stability and hydrodynamic calculations. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 478–492. [Google Scholar] [CrossRef]
- Dong, Q.; Guo, X.; Li, X.; Lu, W.; Yang, J. Coupled dynamics between a turret-moored FPSO and a semi-submersible accommodation platform. Ocean. Eng. 2021, 229, 108764. [Google Scholar] [CrossRef]
- Guan, G.; Yang, Q. Automatic size optimization of FPSO turret area with application of point set based outer shell FE modeling. Ocean. Eng. 2021, 234, 108761. [Google Scholar] [CrossRef]
- Yu, F.; Xu, X. A short-term load forecasting model of natural gas based on optimized genetic algorithm and improved BP neural network. Appl. Energy 2014, 134, 102–113. [Google Scholar] [CrossRef]
- Wu, L.; Yang, Y.; Maheshwari, M.; Li, N. Parameter optimization for FPSO design using an improved FOA and IFOA-BP neural network. Ocean. Eng. 2019, 175, 50–61. [Google Scholar] [CrossRef]
- Amin, I.; Dai, D.; Day, S.; Oterkus, S.; Oterkus, E. Experimental investigation on the influence of interceptor plate on the motion performance of a cylindrical FPSO. Ocean. Eng. 2021, 243, 110339. [Google Scholar] [CrossRef]
- Ji, X.; Li, Y.; Tang, Y.; Tong, B. Viscous damping effect and vortex shedding performance of the novel anti-motion structures on a cylindrical FPSO. Ocean. Eng. 2019, 190, 106430. [Google Scholar] [CrossRef]
- Zhao, Z.; Li, Y.; Tang, Y.; Ji, X. Conceptual design and numerical analysis of a novel platform for marginal oilfields development. Ocean. Eng. 2019, 187, 106145. [Google Scholar] [CrossRef]
- Wang, W.H.; Wang, L.L.; Du, Y.Z.; Yao, Y.X.; Huang, Y. Numerical and experimental analysis on motion performance of new sandglass-type floating body in waves. Mar. Struct. 2016, 46, 56–77. [Google Scholar] [CrossRef]
- Wang, T.Y.; Zhang, J.; Liu, J.K. Concept design of a new Non-Ship-Shaped FPSO. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Wollerau, Switzerland, 2012; Volume 170, pp. 2222–2227. [Google Scholar]
- Gu, J.Y.; Xie, Y.L.; Zhang, P.; Chen, Y.; Huang, X.H.; Tao, Y.W. Experimental study on hydrodynamic performance of a new type of deep draft multi-column FDPSO. J. Mar. Sci. Technol. 2017, 25, 329–342. [Google Scholar]
- Gu, J.Y.; Xie, Y.L.; Zhao, Y.; Li, W.J.; Tao, Y.W.; Huang, X.H. Study on vortex-induced motions of a new type of deep draft multi-columns FDPSO. China Ocean. Eng. 2018, 32, 1–13. [Google Scholar] [CrossRef]
- Wang, W.H.; Ran, X.M.; Zhao, Z.H.; Huang, Y. Comparative analysis on various components of heave damping for sandglass-type floating body. Ocean. Eng. 2021, 221, 108555. [Google Scholar] [CrossRef]
- Wang, T.Y.; Yang, L.J.; Xu, Z.G.; Liu, J.K. Design and comparison of catenary and taut mooring systems for new concept FPSO IQFP in shallow waters. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Wollerau, Switzerland, 2013; Volume 353, pp. 2670–2675. [Google Scholar]
- Li, J.; Liu, S.; Zhao, M.; Teng, B. Experimental investigation of the hydrodynamic characteristics of heave plates using forced oscillation. Ocean. Eng. 2013, 66, 82–91. [Google Scholar] [CrossRef]
- Yu, C.; Hu, Z.; Wang, S. Investigation of heave response of the deep water octagonal FDPSO using various heave plate configurations. J. Mar. Sci. Appl. 2017, 16, 446–457. [Google Scholar] [CrossRef]
- Pinguet, R.; Benoit, M.; Molin, B.; Rezende, F. CFD analysis of added mass, damping and induced flow of isolated and cylinder-mounted heave plates at various submergence depths using an overset mesh method. J. Fluids Struct. 2022, 109, 103442. [Google Scholar] [CrossRef]
- Ji, X.; Li, Y.; Tang, Y.; Zhu, Q.; Hu, Z. Damping performance of annular anti-motion structures on a cylindrical floating drilling production storage and offloading system. Ocean. Eng. 2019, 192, 106590. [Google Scholar] [CrossRef]
- Yuan, H.; Tang, Y.; Li, Y.; Qu, Z. Experimental study on the damping performance of a new-type FDPSO with anti-motion structure. Ship Sci. Technol. 2023, in press. [Google Scholar]
- Zhang, J.; Li, Y.; Tang, Y.; Qu, X.; Huang, J. Analysis on dynamic response of new type reduced draft floating foundation wind turbine. Acta Energ. Sol. Sin. 2021, 42, 378–383. (In Chinese) [Google Scholar]
- Journée, J.M.J.; Massie, W.W. Offshore Hydromechanics; Delft University of Technology: Delft, The Netherlands, 2001. [Google Scholar]
- Li, Y.; Zhu, Q.; Liu, L.; Tang, Y. Transient response of a SPAR-type floating offshore wind turbine with fractured mooring lines. Renew. Energy 2018, 122, 576–588. [Google Scholar] [CrossRef]
- Qu, X.; Li, Y.; Tang, Y.; Hu, Z.; Zhang, P.; Yin, T. Dynamic response of spar-type floating offshore wind turbine in freak wave considering the wave-current interaction effect. Appl. Ocean. Res. 2020, 100, 102178. [Google Scholar] [CrossRef]
- Tong, B.; Ji, X.; Wang, H.; Tang, Y. Study on damping performances of damping structure of cylindrical FPSO. Ocean. Eng. 2018, 36, 22–29. (In Chinese) [Google Scholar]
- Liu, B. Adaptability analysis of cylindrical FWPSO under environmental conditions in the South China Sea. China Offshore Oil Gas 2019, 31, 154–158. (In Chinese) [Google Scholar]
- Li, G.; Li, D.; Wang, C.; Yi, C.; Jia, L. Research on Motion Response Characteristics of Cylindrical FPSO in Waves. Ship Boat 2022, 30, 22–28. (In Chinese) [Google Scholar]
- Det Norske Veritas. Environmental Conditions and Environmental Loads; Det Norske Veritas: Bærum, Norway, 2017. [Google Scholar]
- Bosma, B.; Lewis, T.; Brekken, T.; Von Jouanne, A. Wave Tank Testing and Model Validation of an Autonomous Wave Energy Converter. Energies 2015, 8, 8857–8872. [Google Scholar] [CrossRef]
- Ji, R.; Sheng, Q.; Wang, S.; Zhang, Y.; Zhang, X.; Zhang, L. Array Characteristics of Oscillating-Buoy Two-Floating-Body Wave-Energy Converter. J. Mar. Sci. Appl. 2019, 18, 325–333. [Google Scholar] [CrossRef]
- Chu, B.; Zhang, X. On the natural frequencies and modal shapes in two-dimensional moonpools with recesses in finite water depth. Appl. Ocean. Res. 2021, 115, 102787. [Google Scholar] [CrossRef]
- Feng, L. Usage of Polyester Rope in Deep water Mooring System. Ocean. Eng. Equip. Technol. 2016, 3, 315–319. (In Chinese) [Google Scholar]
- Xue, M.A.; Dou, P.; Zheng, J.; Lin, P.; Yuan, X. Pitch motion reduction of semisubmersible floating offshore wind turbine substructure using a tuned liquid multicolumn damper. Mar. Struct. 2022, 84, 103237. [Google Scholar] [CrossRef]
- Liang, L.; Cheng, Q.; Cai, P. Design of fin stabilizer controller during ship zig-zag motion. Ocean. Eng. 2022, 252, 111049. [Google Scholar] [CrossRef]
- Bai, X.; Song, C.; Zhang, J.; Lu, W.; Li, X. Effect of Damping Characteristics of Floating Platform on Motion response. Ship Eng. 2022, 44, 597–602. (In Chinese) [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | FWPSO | FCDS | FCDS with a Closed AMS |
|---|---|---|---|
| Diameter/m | 70.0 | 70.0 | 70.0 |
| Moonpool diameter/m | 12–18 | 12–18 | 12–18 |
| Moonpool height/m | 33 | 53 | 53 |
| Displacement/kg | 8.62 × 107 | 8.17 × 107 | 1.93 × 108 |
| Oil Storage (Full Case)/kg | 4.2 × 107 | 4.2 × 107 | 4.2 × 107 |
| Total draft (Buoyancy Providing)/m | 19.0 (19.0) | 40.0 (19.0) | 40.0 (40.0) |
| Outer diameter of anti-motion structure/m | 96.0 | 96.0 | 96.0 |
| Height of extensional body/m | - | 21.0 | 21.0 |
| Height of damping structure/m | 6.5/2.5 | 10.0 | 10.0 |
| Diameter of hole/m | - | 1.0 | - |
| Gap between damping structure and main body/m | 0 | 1.0 | 1.0 |
| Height of COG from baseline/m | 22.0 | 22.0 | 22.0 |
| Radius of inertia roll/m | 27.6 | 27.6 | 27.6 |
| Radius of inertia pitch/m | 27.6 | 27.6 | 27.6 |
| Radius of inertia yaw/m | 30.4 | 30.4 | 30.4 |
| Metacentric height | 3.42 | 4.27 | 4.25 |
| FWPSO | FCDS | FCDS with a Closed AMS | |
|---|---|---|---|
| Heave | 0.4 | 0.27 | 0.31 |
| Pitch | 0.15 | 0.18 | 0.11 |
| Chain-Only | Chain-Polyester-Chain | |||
|---|---|---|---|---|
| Segment | Chain | Lower Chain | Polyester | Upper Chain |
| Diameter/mm | 172 | 172 | 286 | 172 |
| Mass in air/kg•m−1 | 589 | 589 | 57.4 | 589 |
| Mass in water/kg•m−1 | 512 | 512 | 14.7 | 512 |
| MBL/kN | 24,513 | 24,513 | 23,544 | 24,513 |
| EA/kN | 2.53 × 106 | 2.53 × 106 | 6.43 × 105 | 2.53 × 106 |
| Length/m | 963 | 100 | 1650 | 75 |
| Clump/kg | 16 × 5000 | - | - | - |
| Mooring Type | Chain Only | Chain-Poly-Chain |
|---|---|---|
| Surge | 0.0246 | 0.0263 |
| Heave | 0.27 | 0.27 |
| Pitch | 0.18 | 0.18 |
| Parameter | Value |
|---|---|
| Wave Spectrum | JONSWAP |
| Significant wave height | 13.7 m |
| Peakedness period | 15.5 s |
| Peakedness factor | 3.3 |
| Wind speed | 42.9 m/s |
| Current Speed | 2.12 m/s |
| Surge Max/m | Surge Mean/m | Heave Max/m | Heave Mean/m | Tension Max/kN | Tension Mean/kN | |
|---|---|---|---|---|---|---|
| FCDS intact | 21.75 | 16.25 | 3.01 | 0.00 | 1.13 × 104 | 8.54 × 103 |
| FWPSO intact | 29.26 | 15.55 | 6.09 | 0.00 | 1.26 × 104 | 8.20 × 103 |
| FCDS 1line broken | 28.57 | 23.00 | 3.01 | 0.01 | 1.49 × 104 | 1.11 × 104 |
| FWPSO 1line broken | 36.27 | 21.97 | 6.11 | 0.01 | 1.61 × 104 | 1.06 × 104 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, Y.; Zhao, Z.; Tang, Y.; Li, H.; Zhang, Y.; Hu, Y. Dynamic Responses of the Cylindrical Floating Drilling Production Storage and Offloading System with Annular Anti-Motion Structures under the Survival Sea Scenario. J. Mar. Sci. Eng. 2023, 11, 218. https://doi.org/10.3390/jmse11010218
Li Y, Li Y, Zhao Z, Tang Y, Li H, Zhang Y, Hu Y. Dynamic Responses of the Cylindrical Floating Drilling Production Storage and Offloading System with Annular Anti-Motion Structures under the Survival Sea Scenario. Journal of Marine Science and Engineering. 2023; 11(1):218. https://doi.org/10.3390/jmse11010218
Chicago/Turabian StyleLi, Yan, Yaolong Li, Zhimin Zhao, Yougang Tang, Haoran Li, Yijian Zhang, and Yinan Hu. 2023. "Dynamic Responses of the Cylindrical Floating Drilling Production Storage and Offloading System with Annular Anti-Motion Structures under the Survival Sea Scenario" Journal of Marine Science and Engineering 11, no. 1: 218. https://doi.org/10.3390/jmse11010218
APA StyleLi, Y., Li, Y., Zhao, Z., Tang, Y., Li, H., Zhang, Y., & Hu, Y. (2023). Dynamic Responses of the Cylindrical Floating Drilling Production Storage and Offloading System with Annular Anti-Motion Structures under the Survival Sea Scenario. Journal of Marine Science and Engineering, 11(1), 218. https://doi.org/10.3390/jmse11010218