


Dynamic Analysis of Full-Circle Swinging Hoisting Operation of a Large Revolving Offshore Crane Vessel under Different Wave Directions


Abstract
1. Introduction
2. Methodology
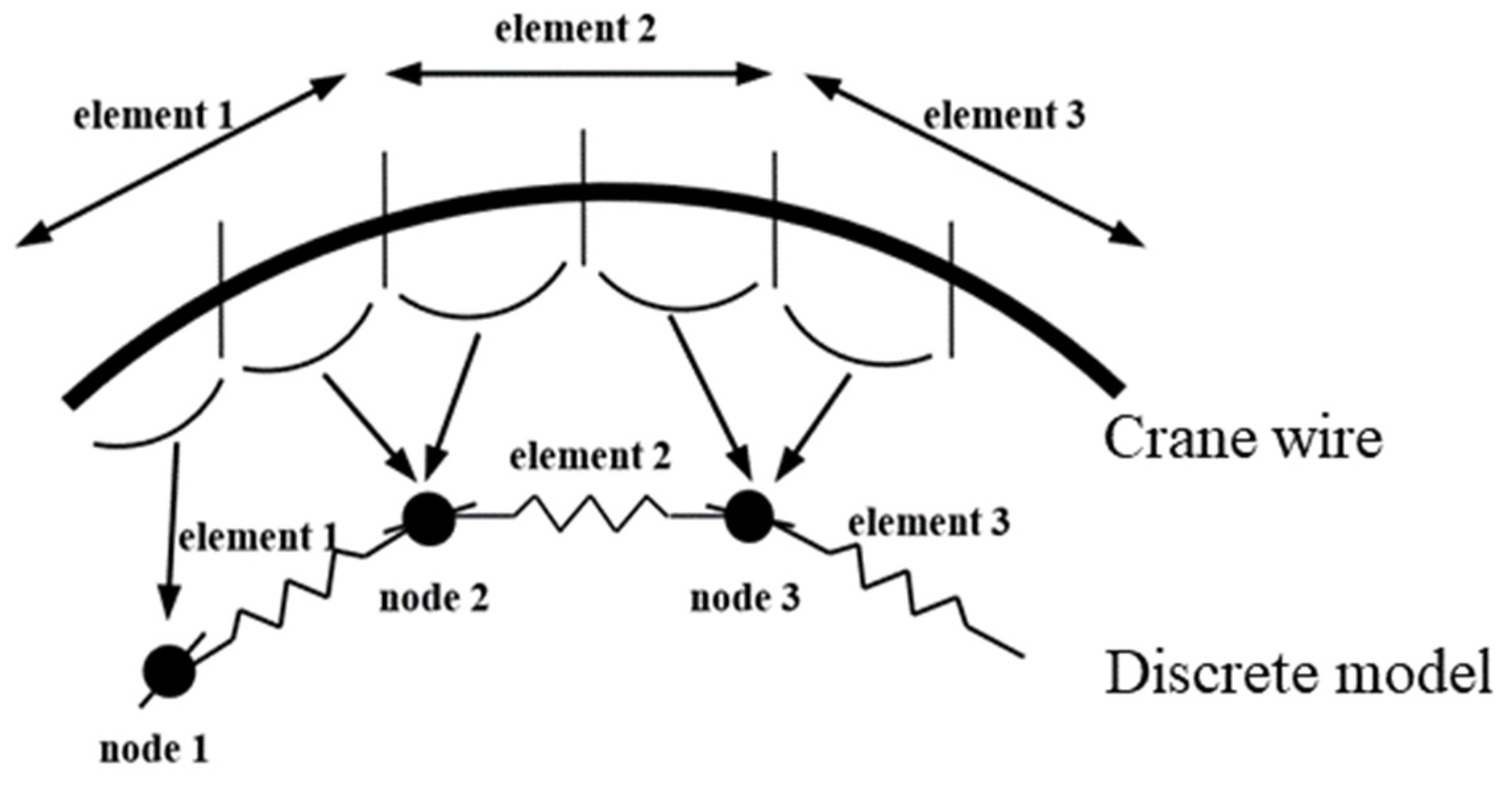
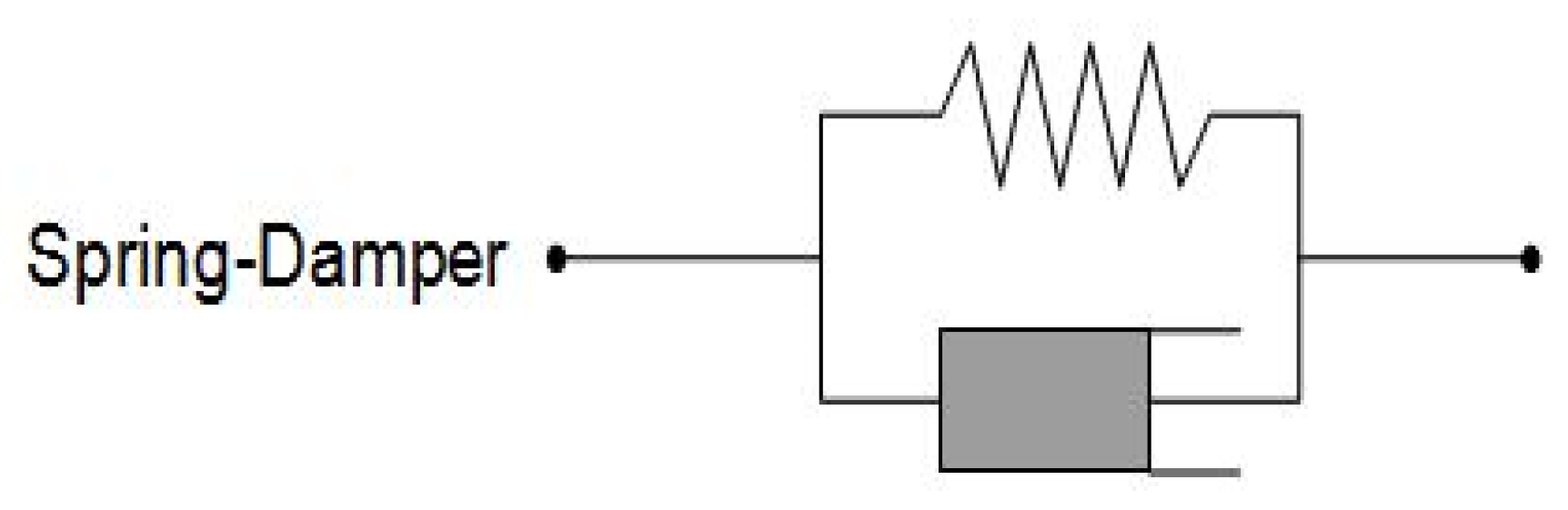
2.1. The lumped Mass Method
2.2. Dynamic Theory of Swinging Hoisting Operation
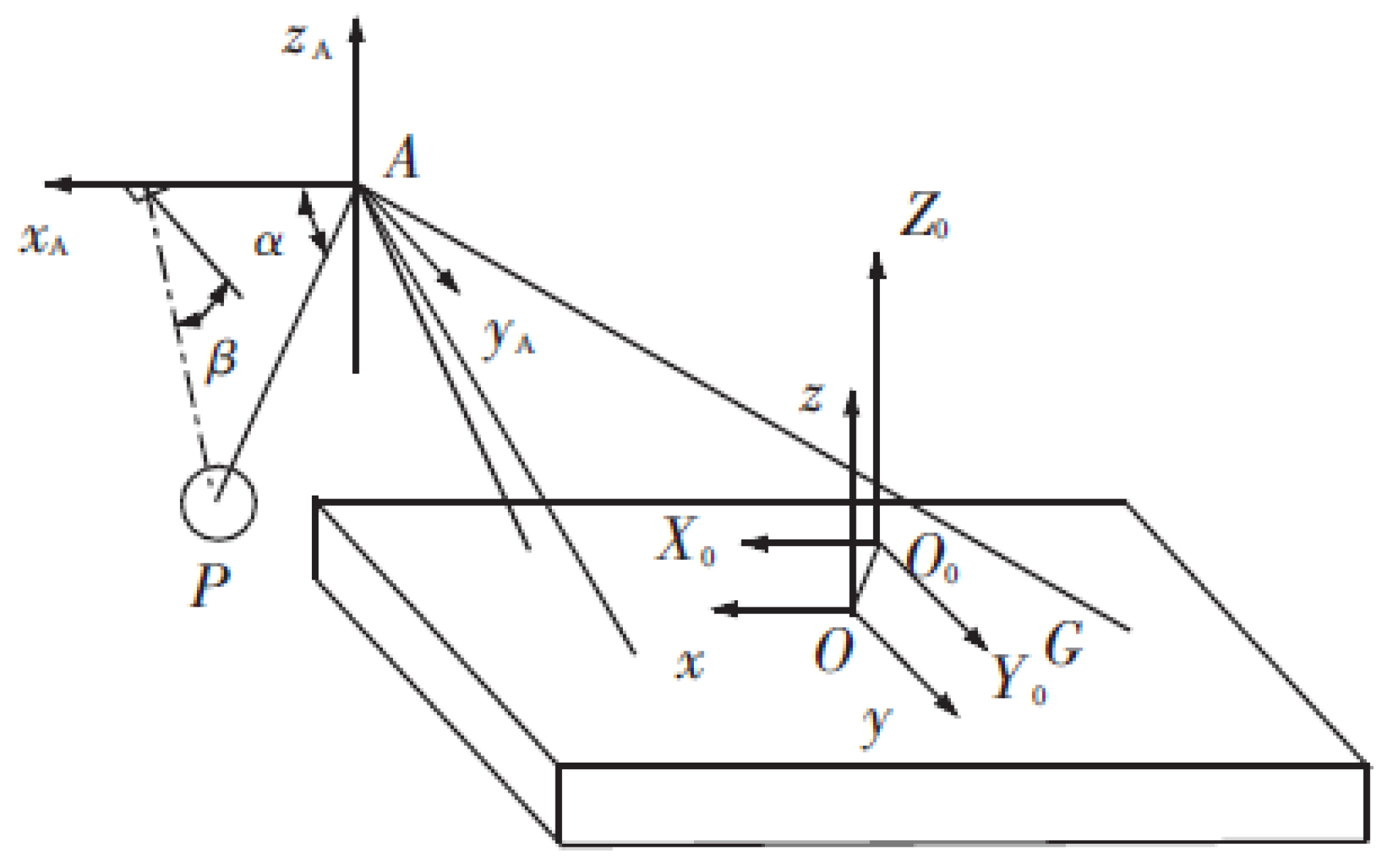
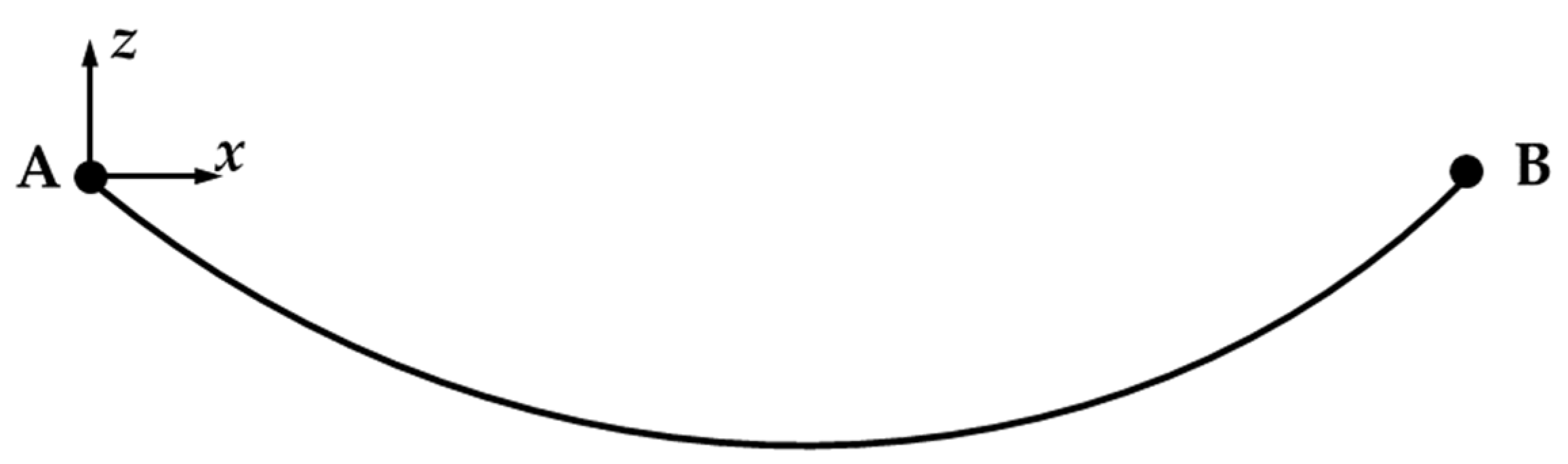
2.2.1. Coordinate System
2.2.2. Motion Equation of the Suspension Crane Wire
3. Numerical Model Set-Up
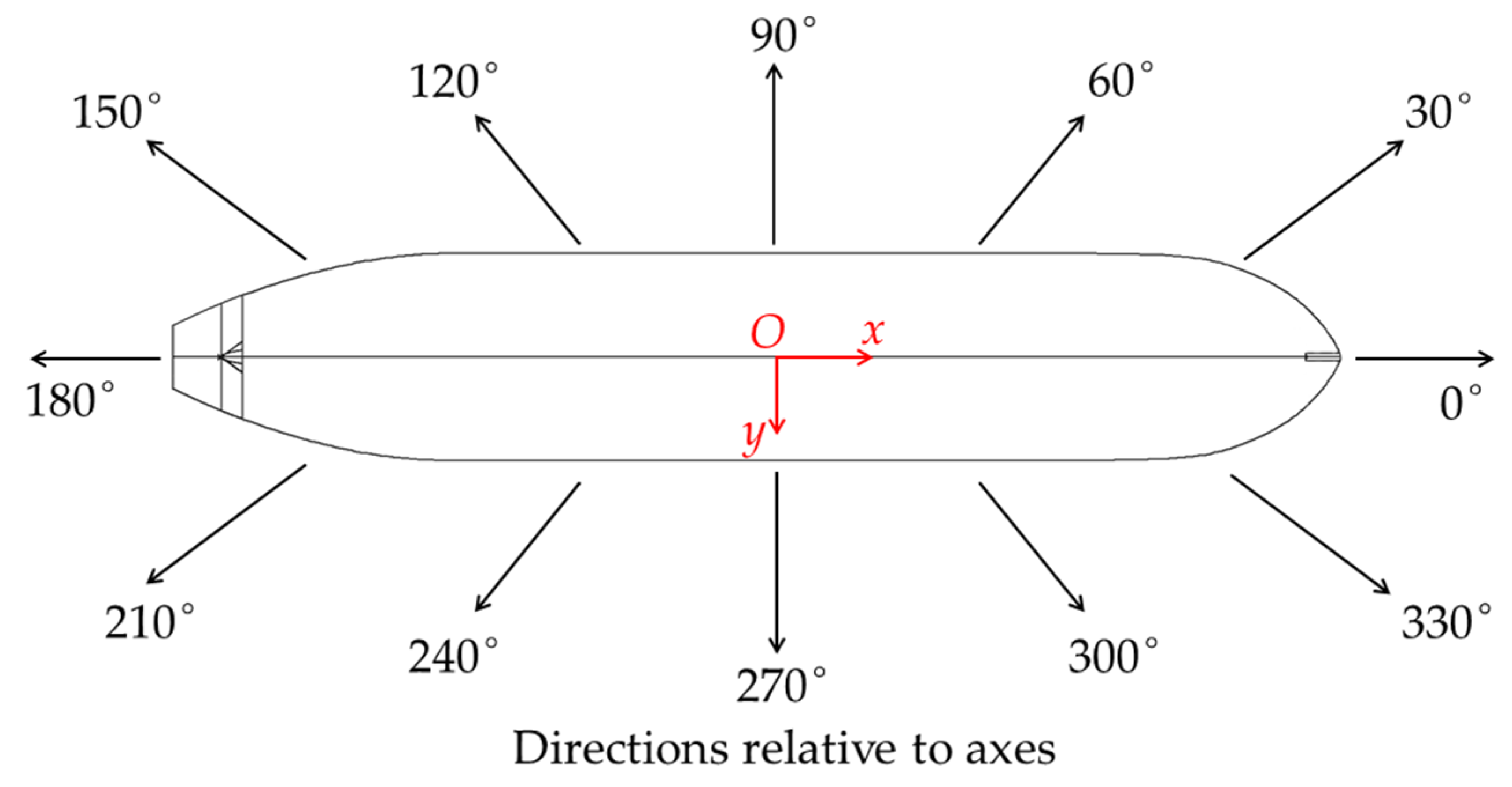
3.1. Basic Parameters of the Vessel and Wave Direction
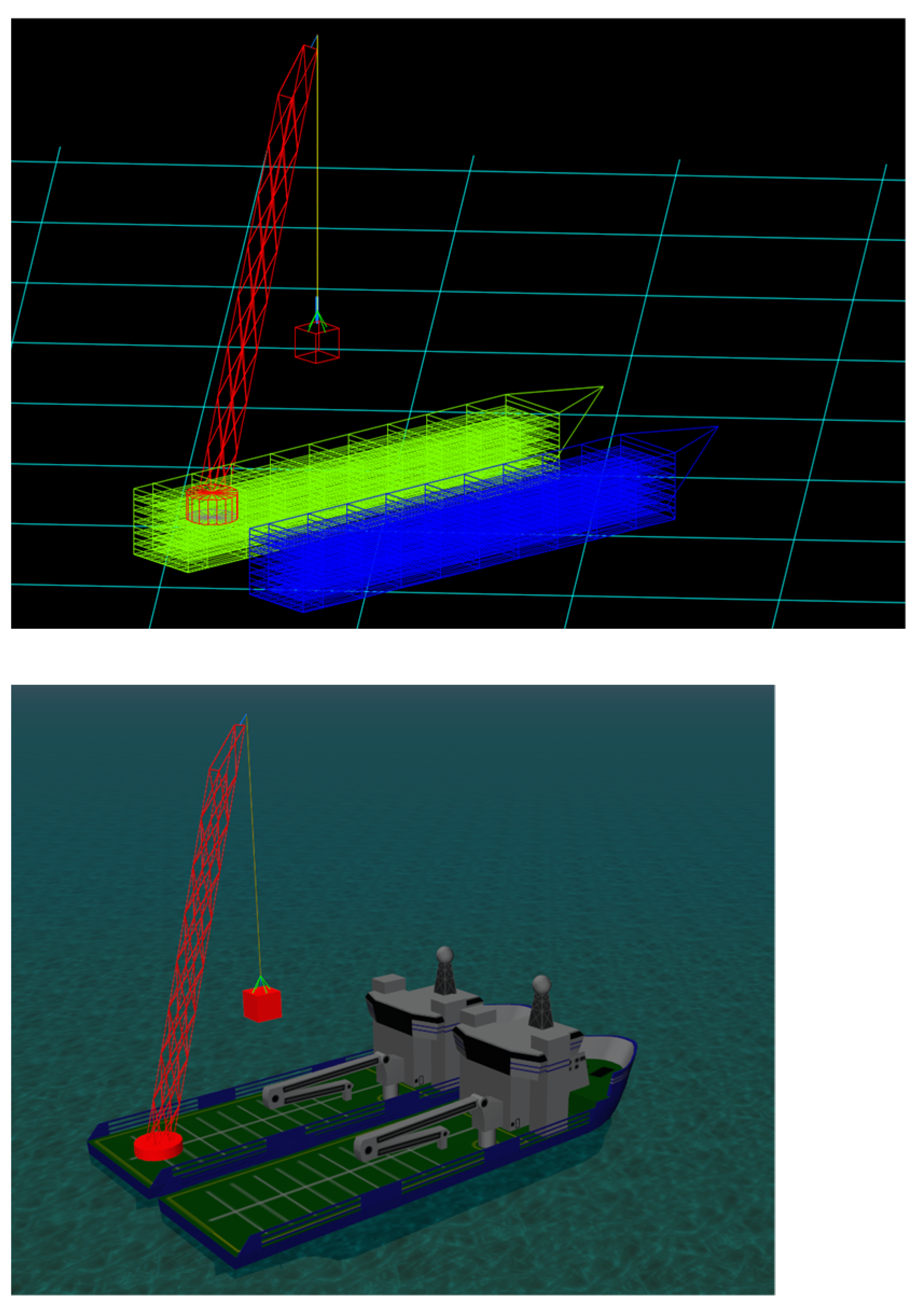
3.2. Numerical Model in OrcaFlex
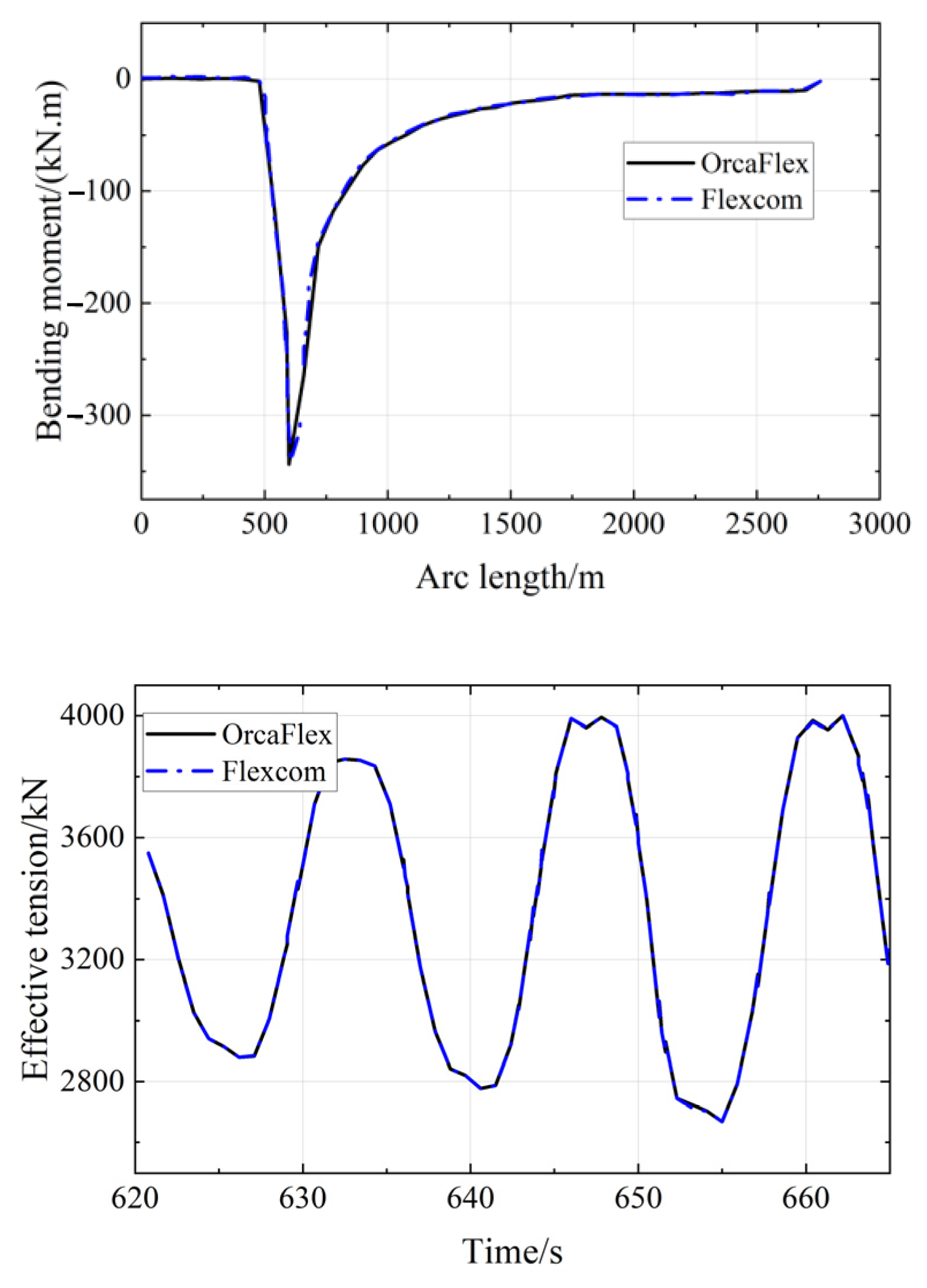
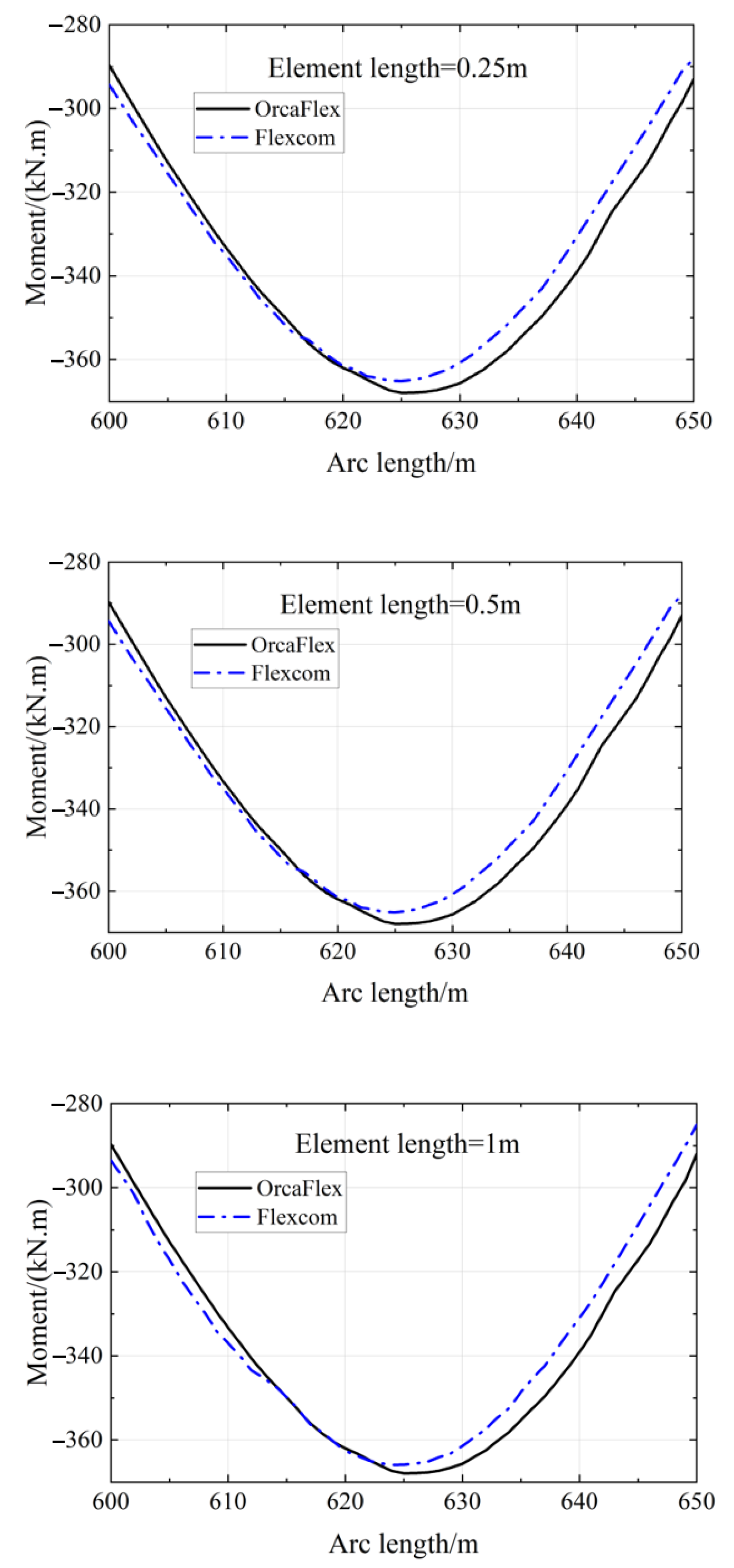
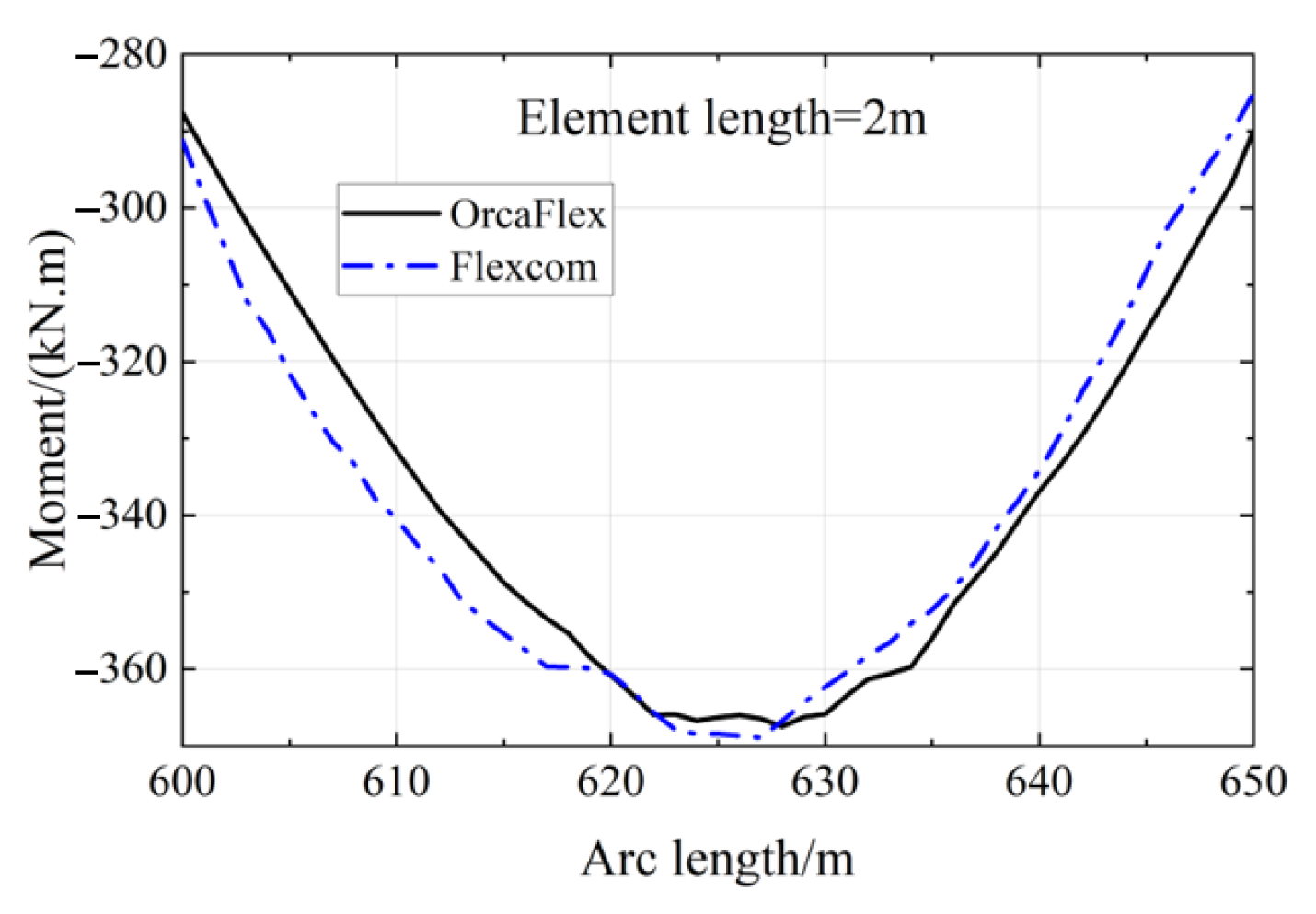
3.3. Validation
4. Results and Discussion
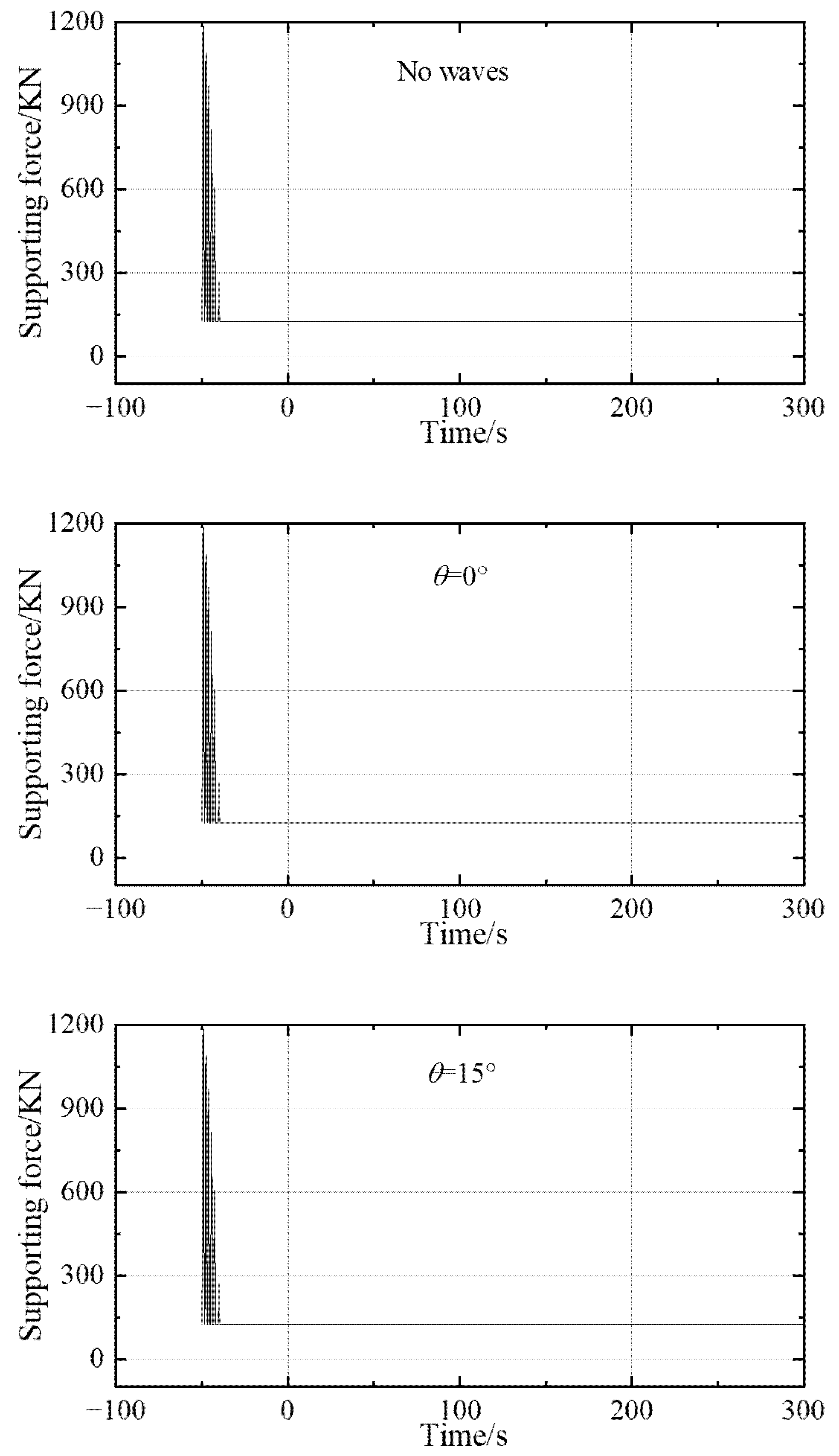
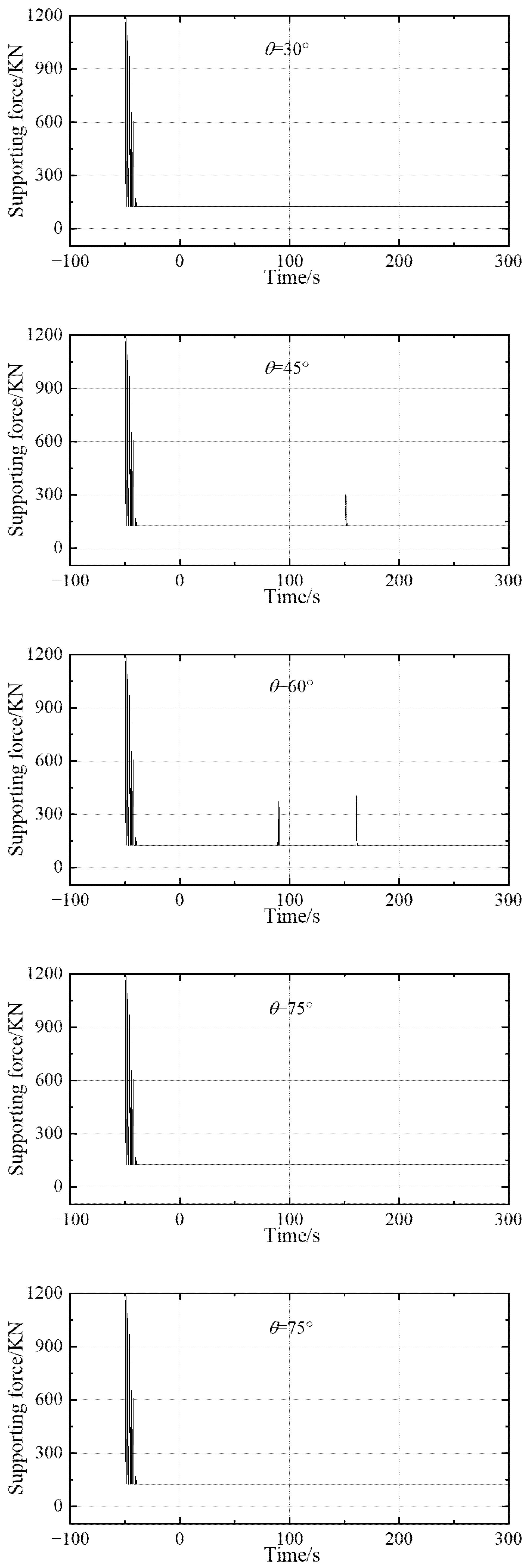
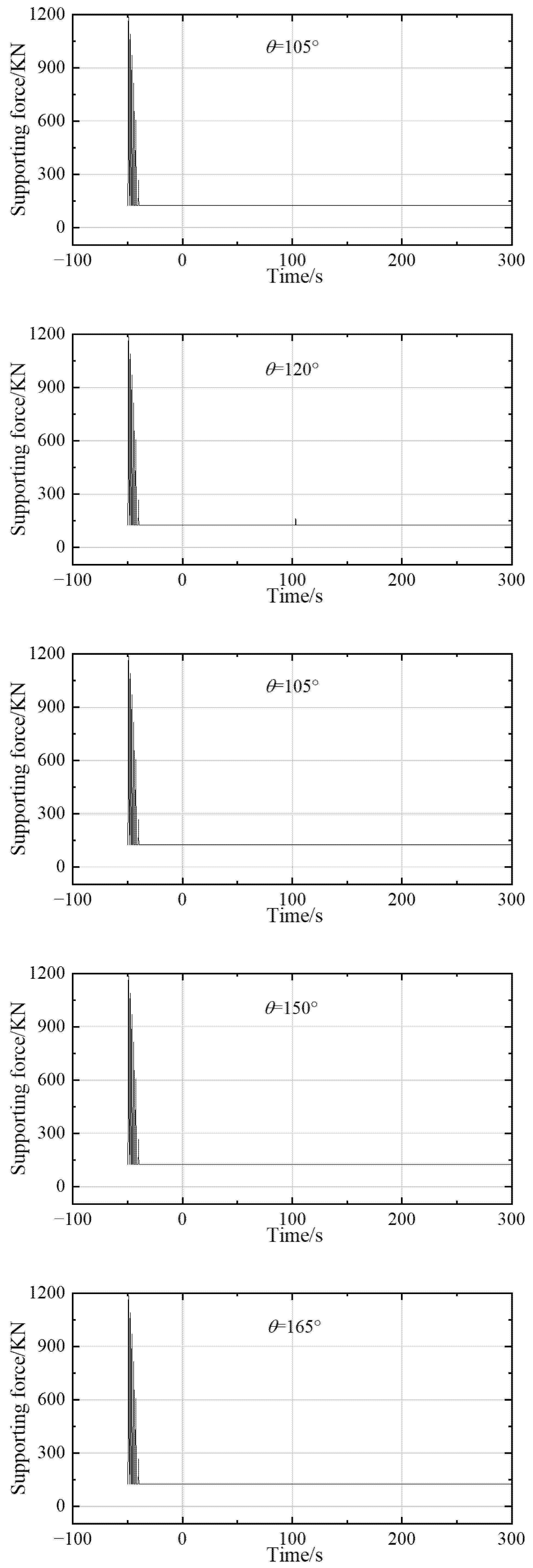
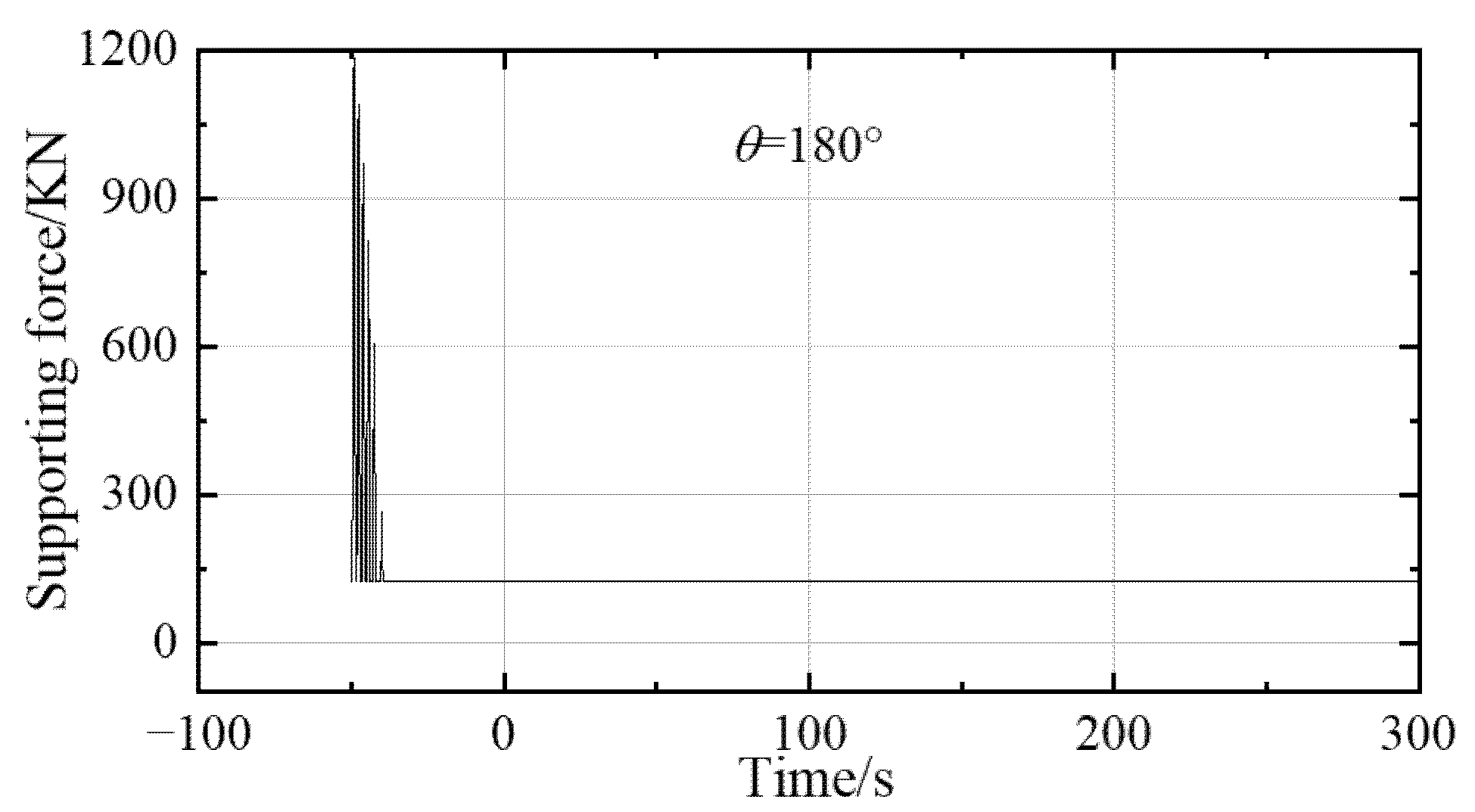
4.1. The Supporting Force of the Offloading Vessel under Different Wave Directions
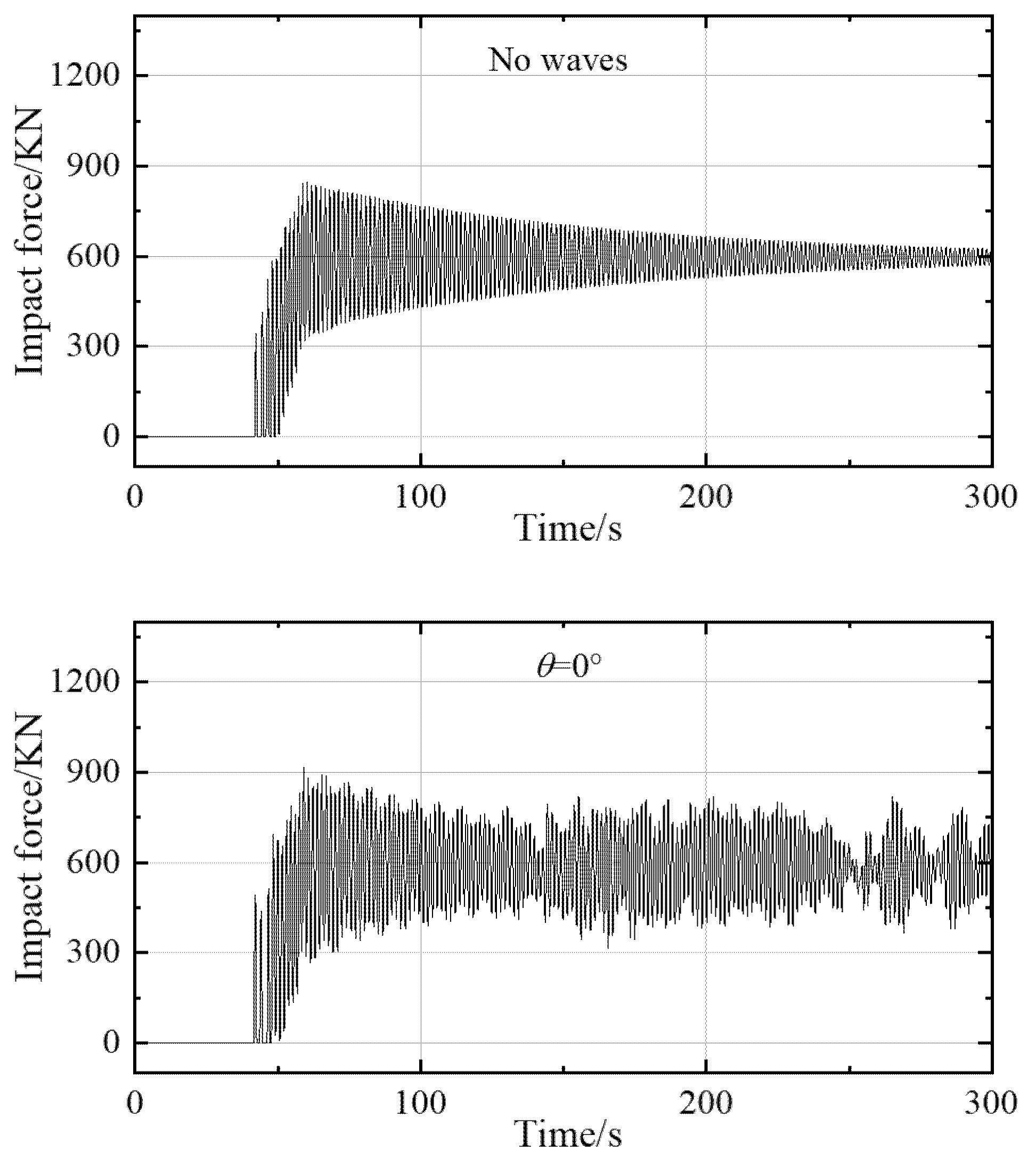
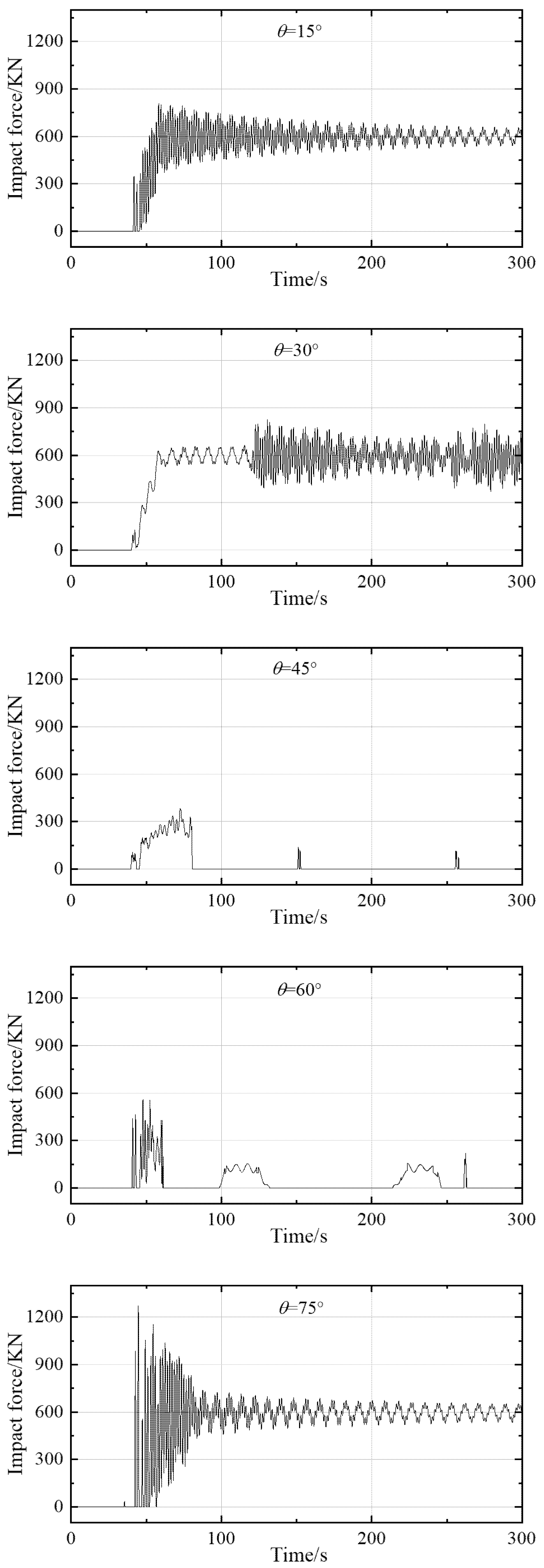
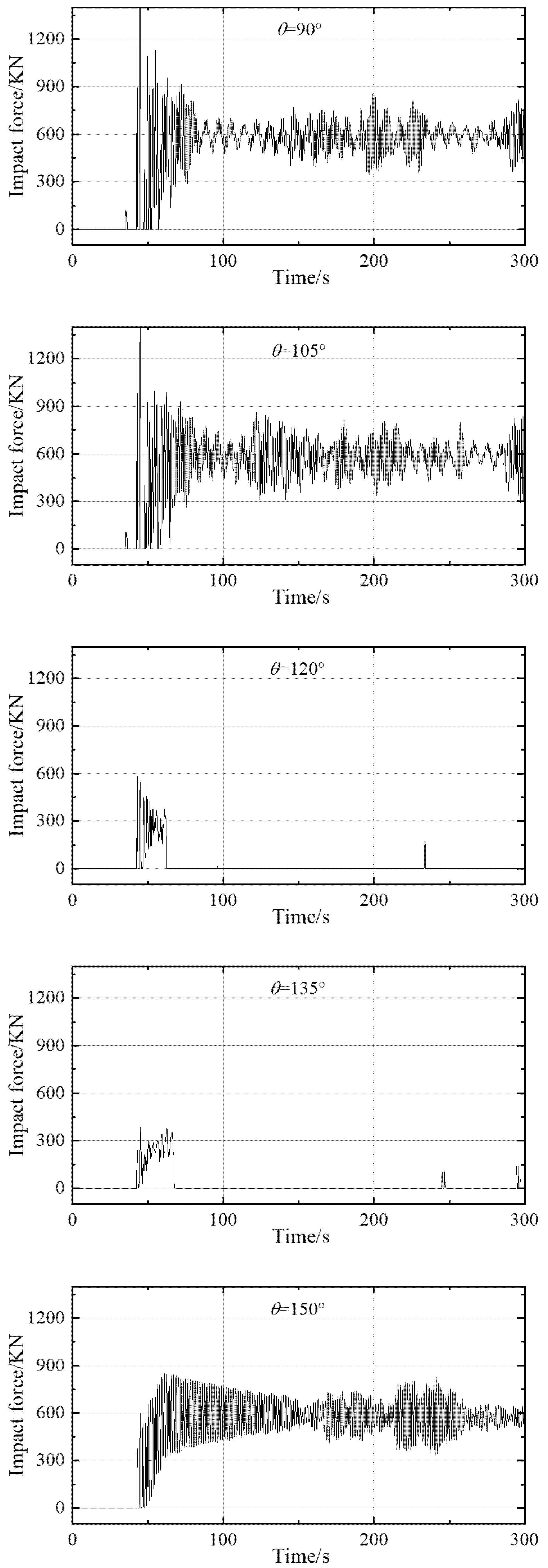
4.2. The Impact Force of the Offshore Crane Vessel under Different Wave Directions
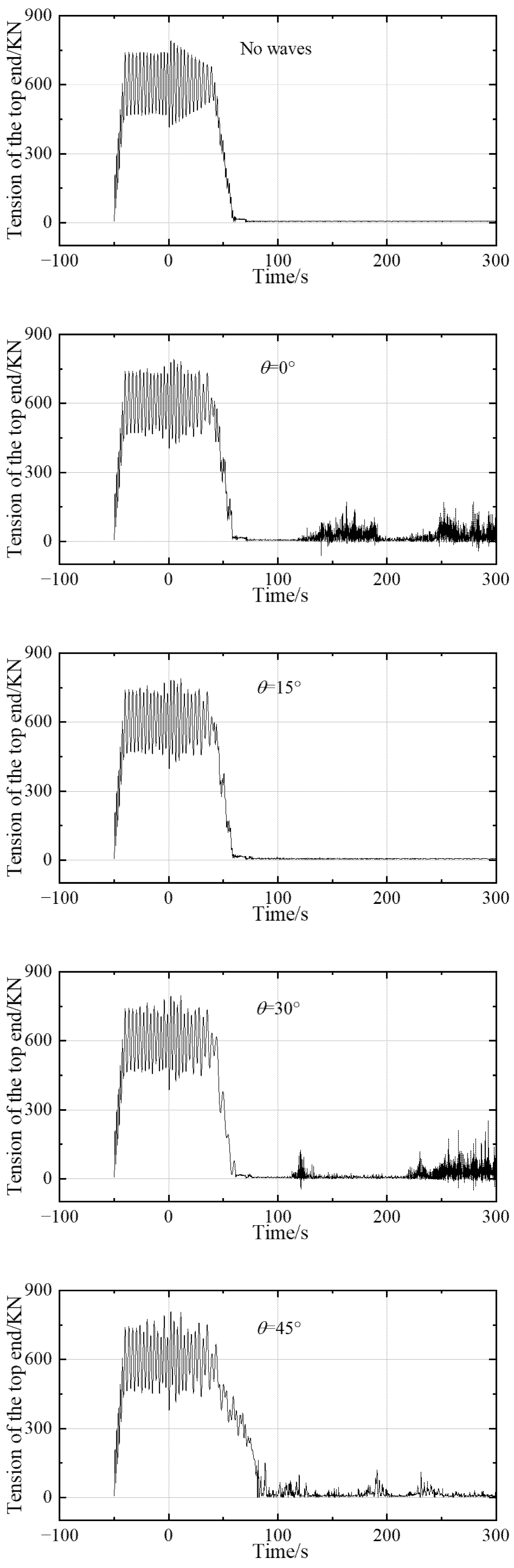
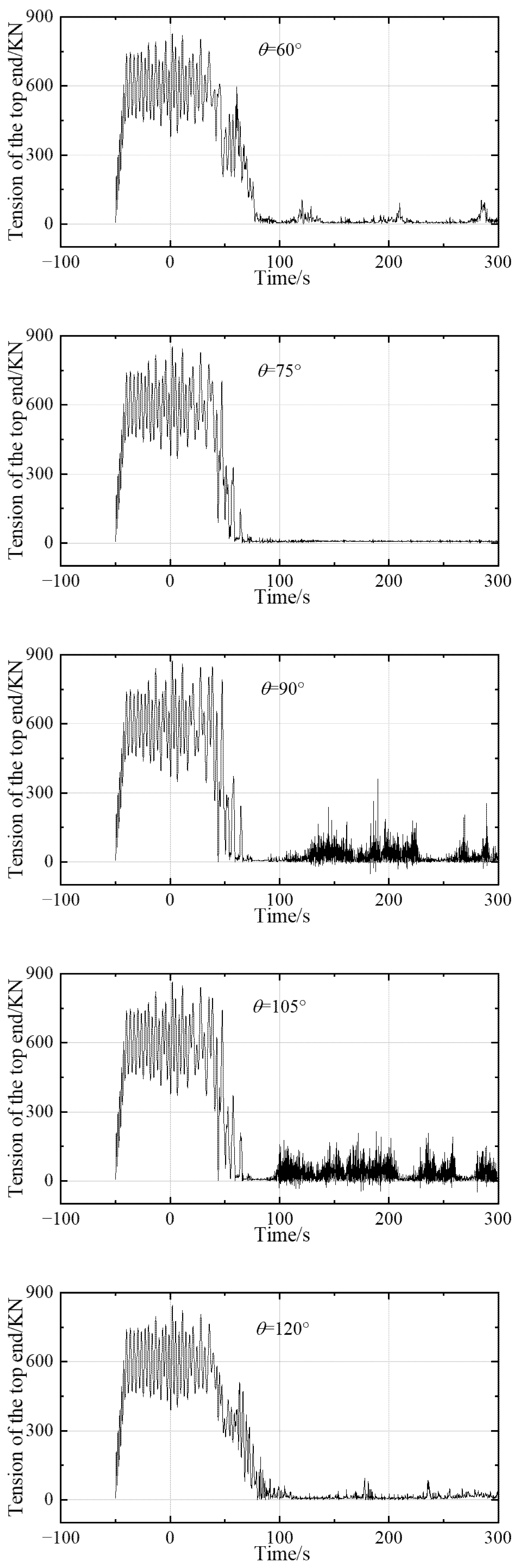
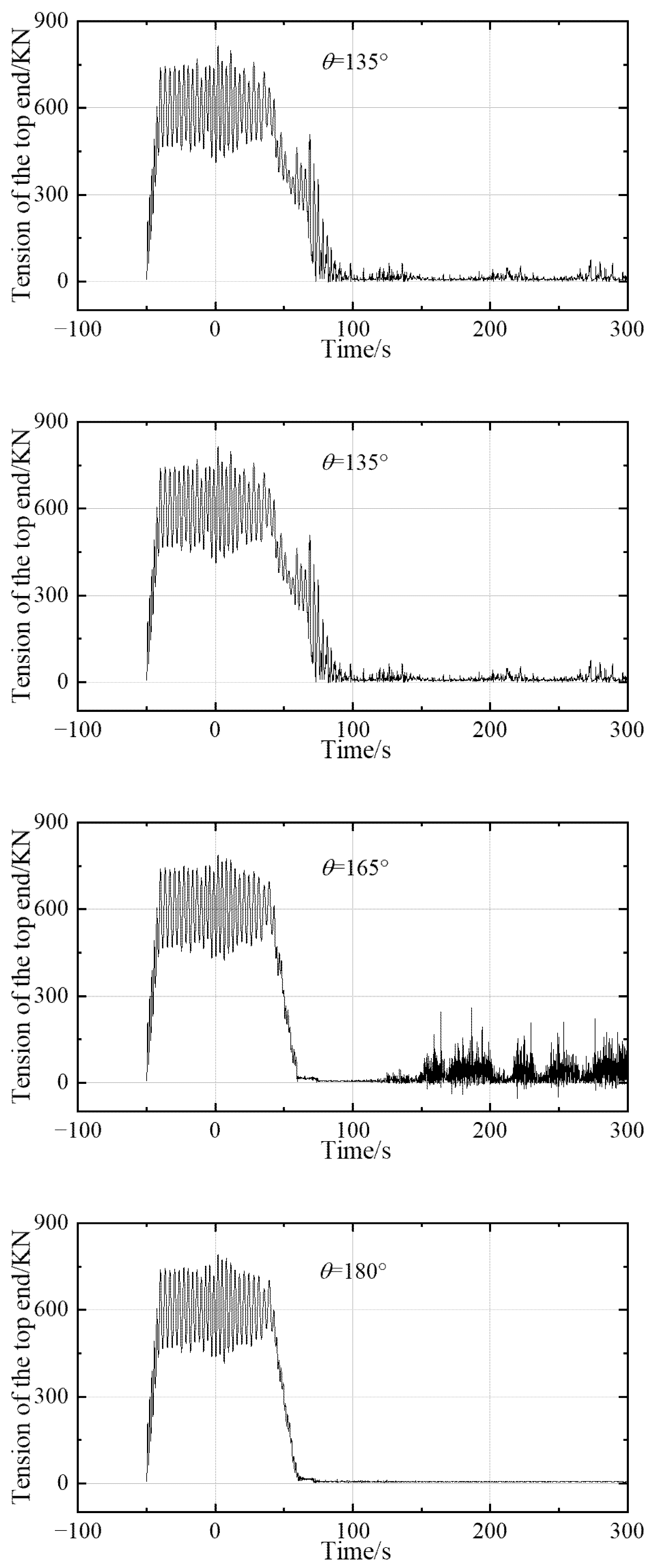
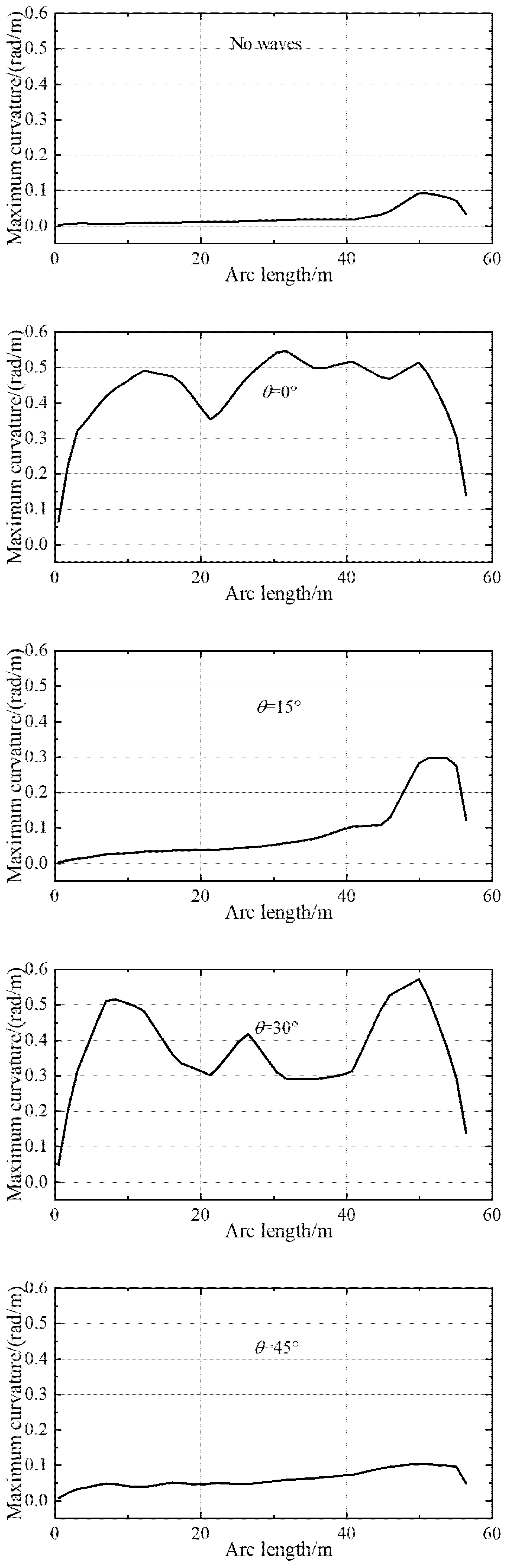
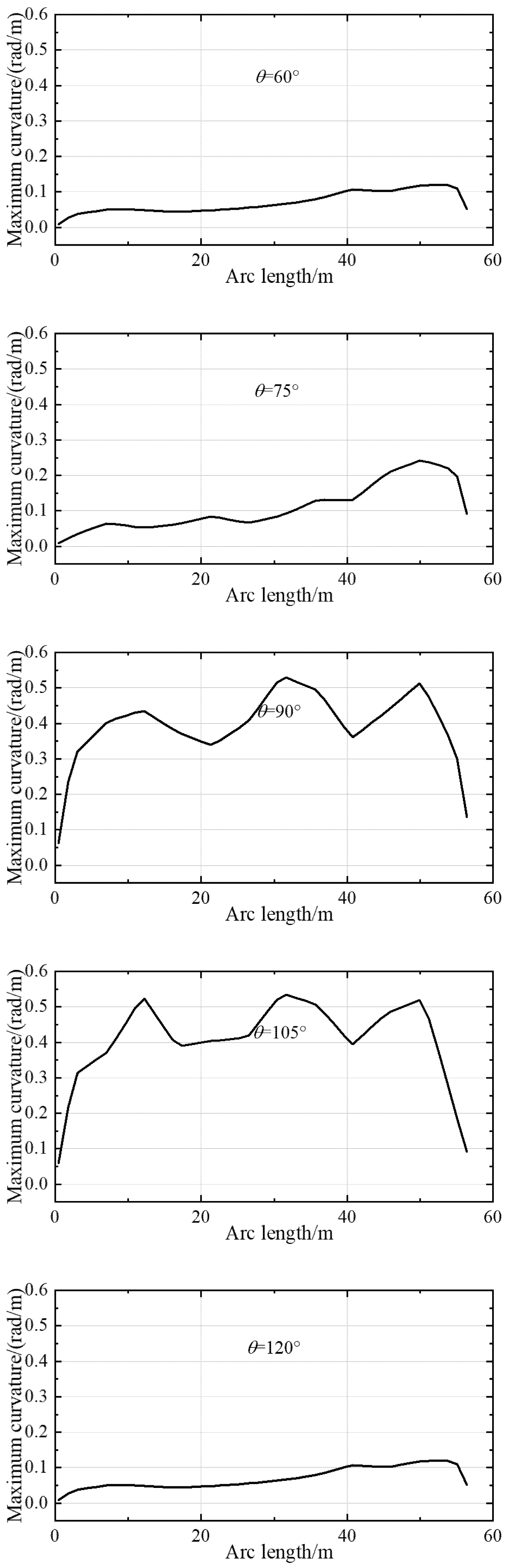
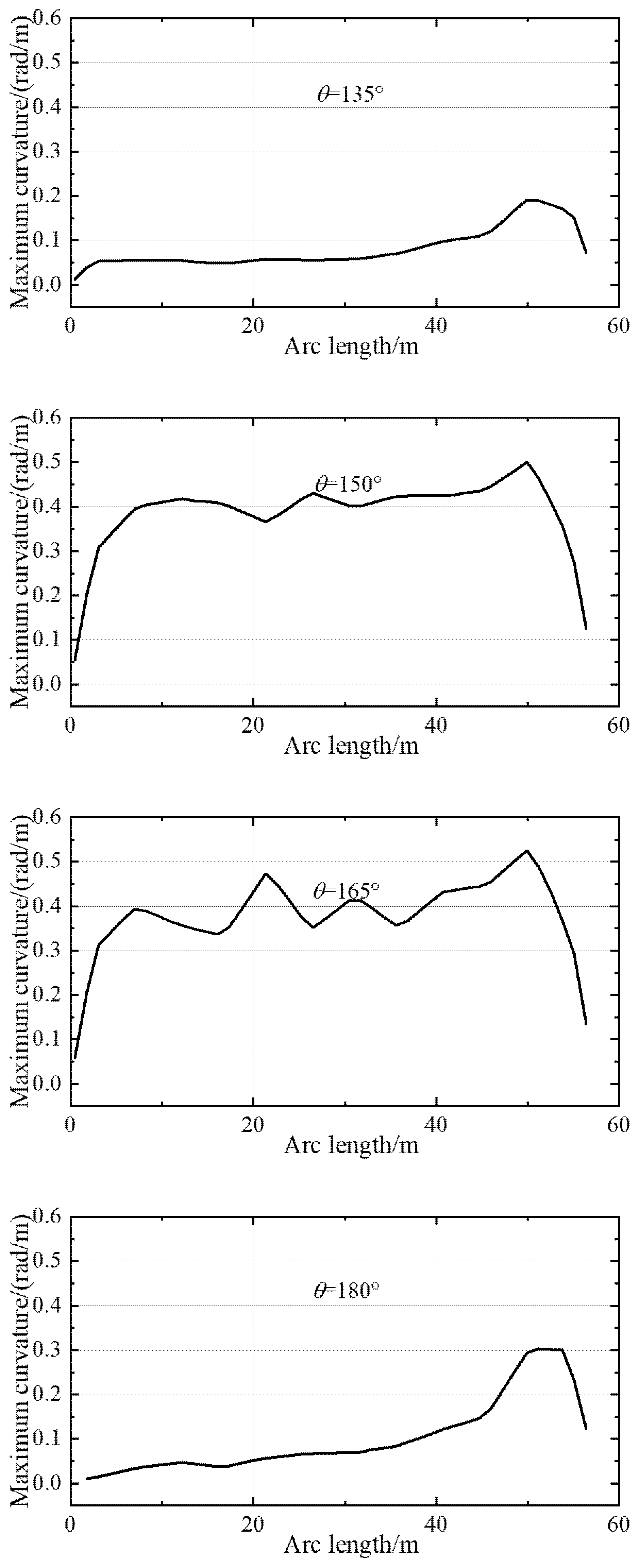
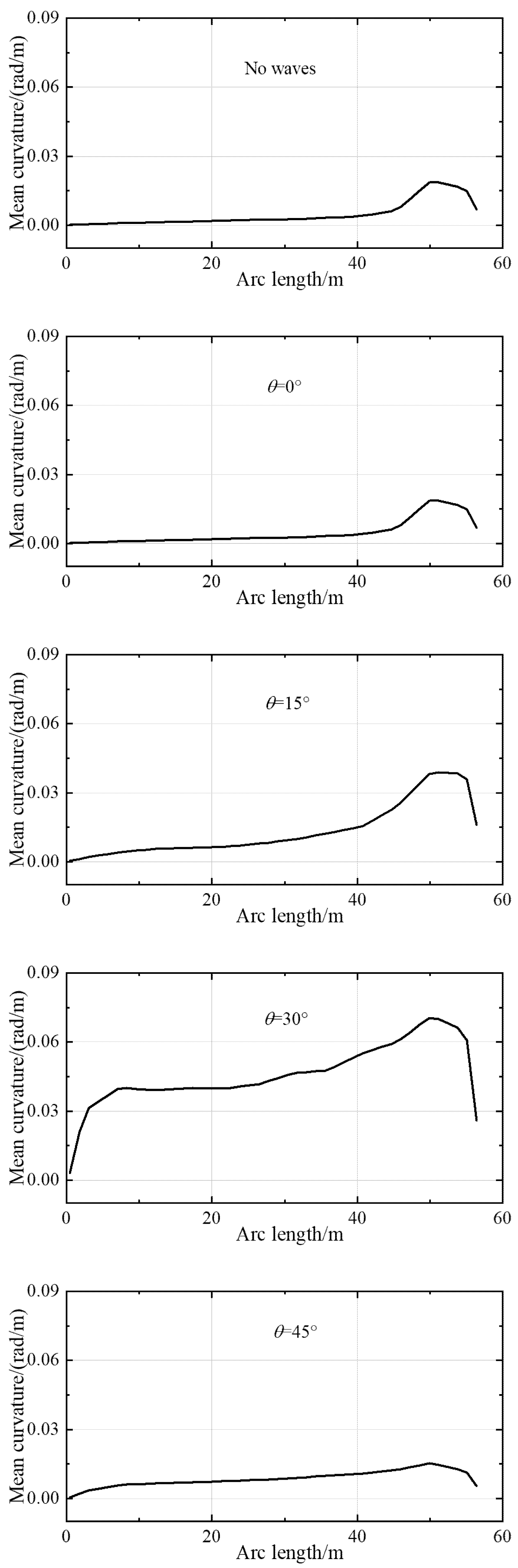
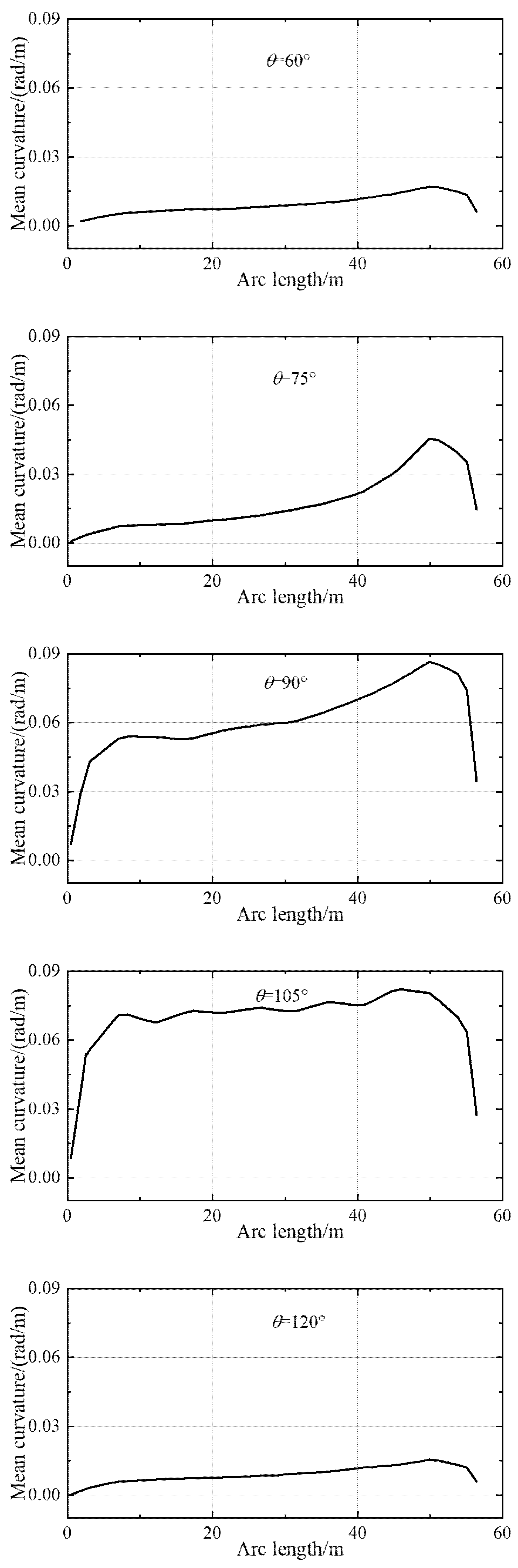
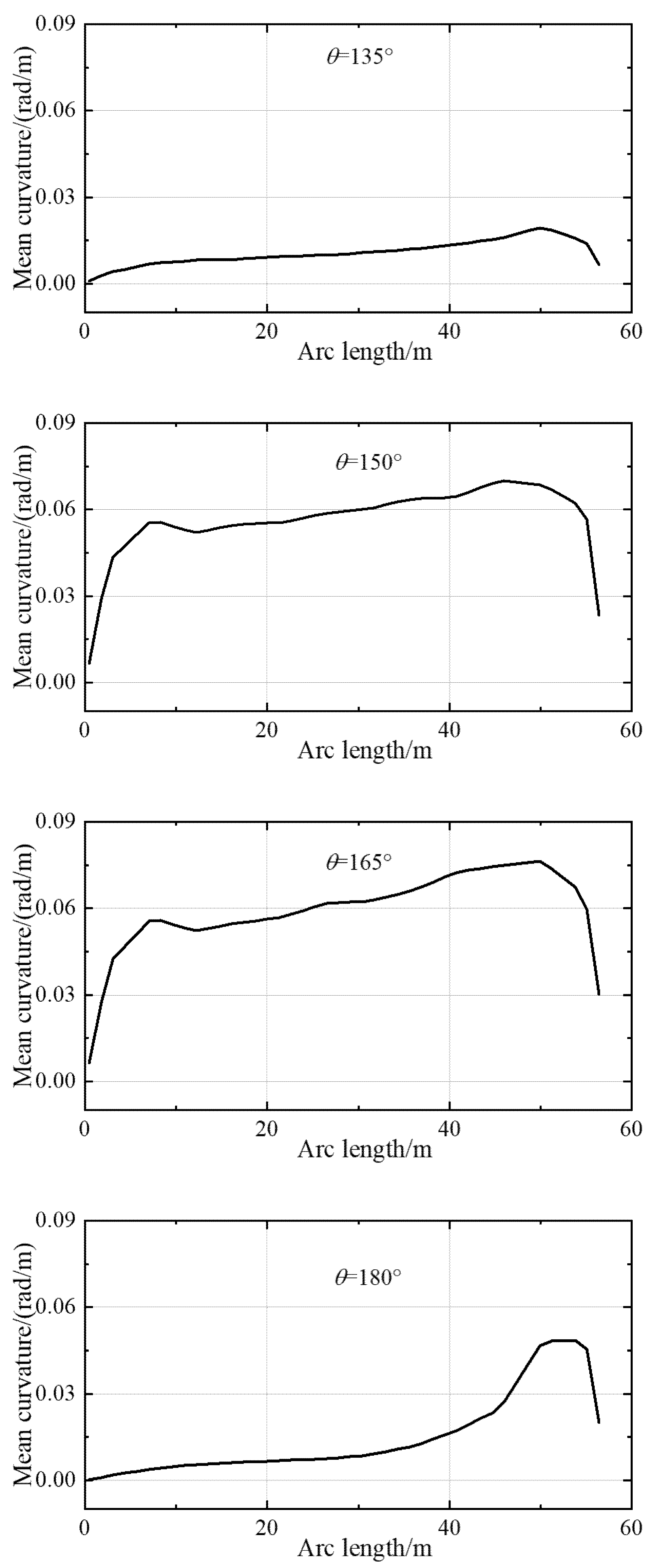
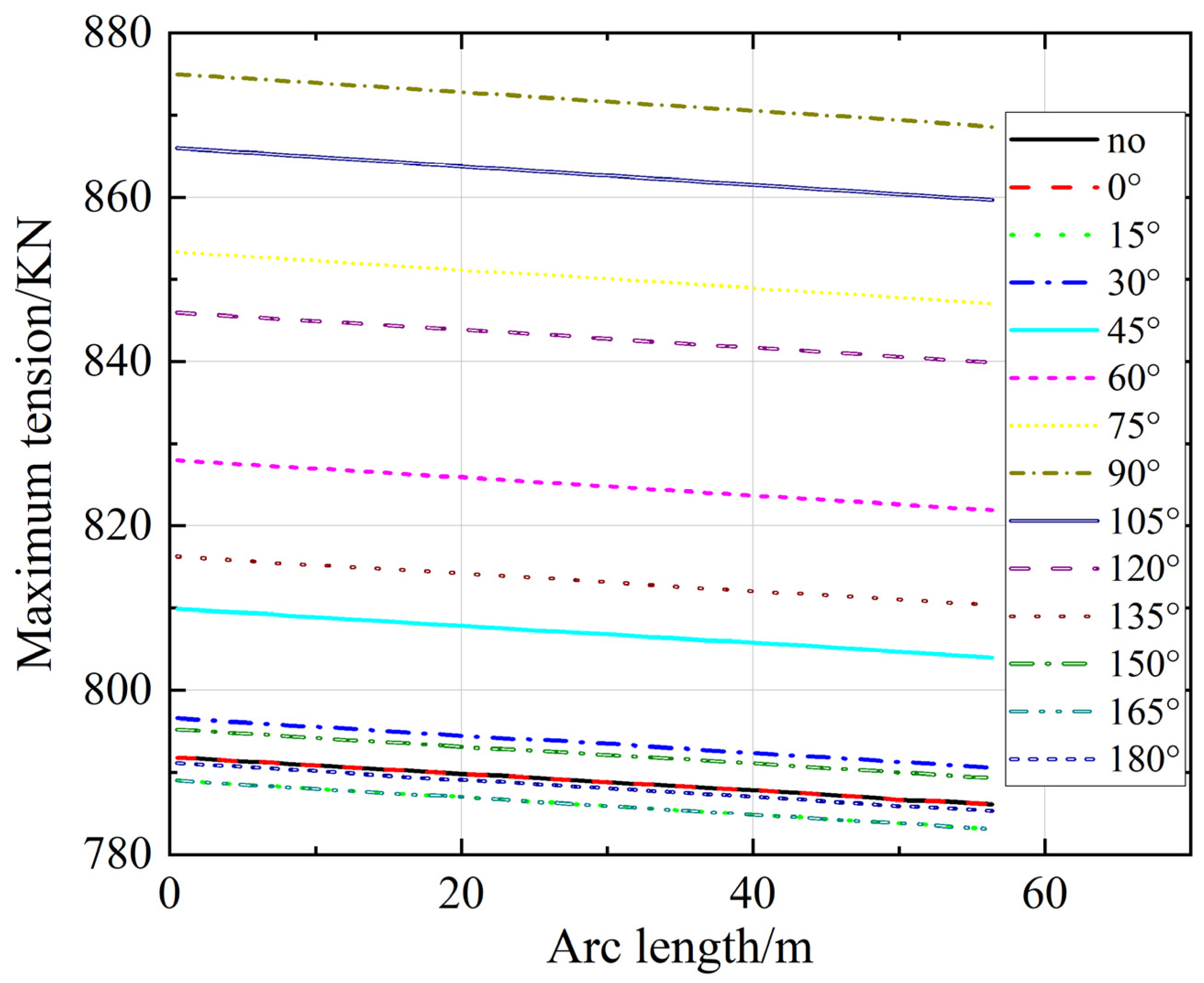
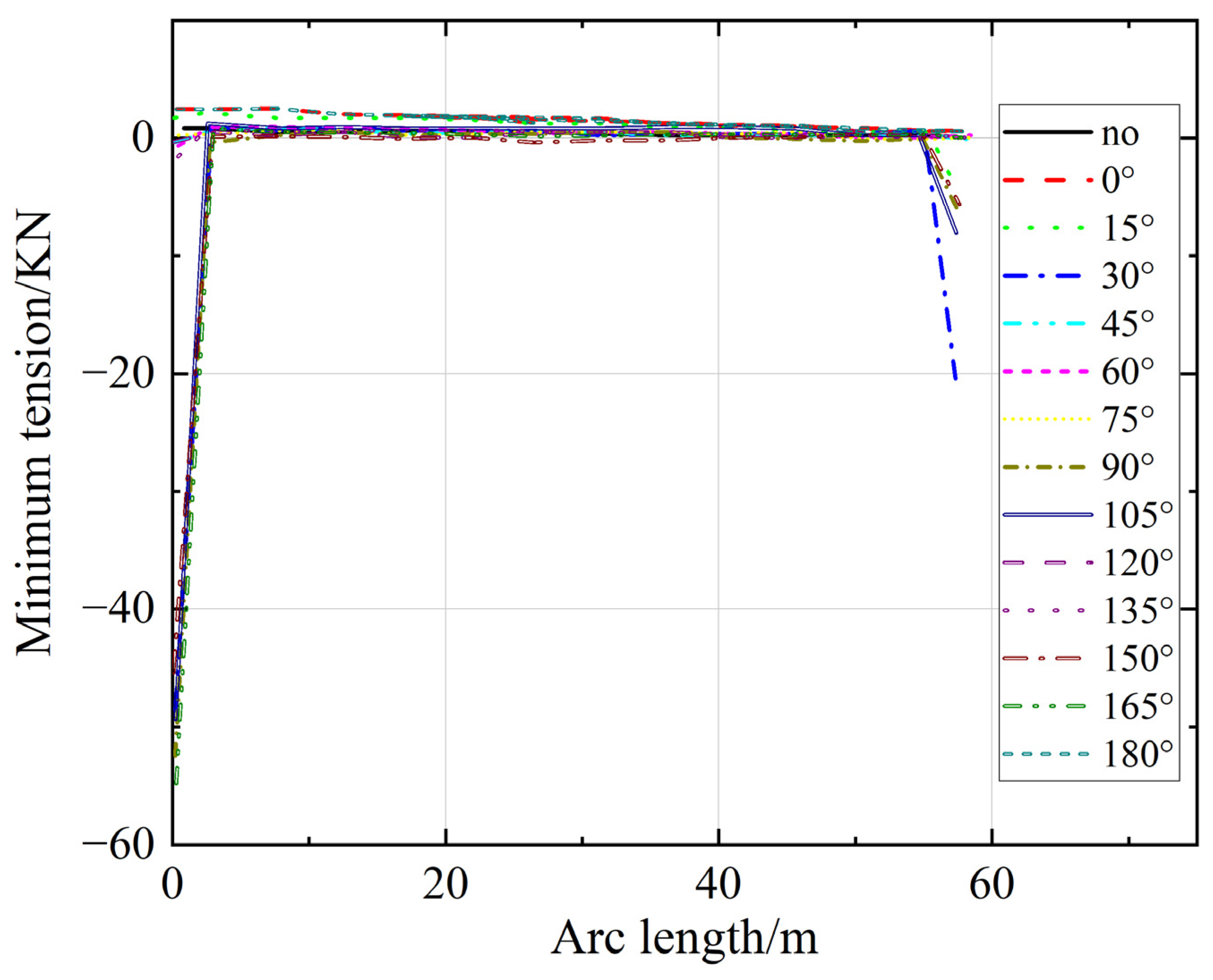
4.3. The Dynamic Response of the Crane Wire under Different Wave Directions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Koohi-Fayegh, S.; Rosen, M.A. A review of energy storage types, applications and recent developments. J. Energy Storage 2020, 27, 101047. [Google Scholar] [CrossRef]
- Sarkodie, S.A.; Adams, S. Renewable energy, nuclear energy, and environmental pollution: Accounting for political institutional quality in South Africa. Sci. Total Environ. 2018, 643, 1590–1601. [Google Scholar] [CrossRef] [PubMed]
- Barber, D.E.; Bonneson, G.W. Latest concepts in offshore lift crane design. In Proceedings of the Fall Meeting of the Society of Petroleum Engineers of AIME, Houston, TX, USA, 4–7 October 1970; OnePetro: Richardson, TX, USA, 1970. [Google Scholar]
- Hoffman, D.; Fitzerald, V.K. Systems approach to offshore crane ship operations. In Proceedings of the SNAME Annual Meeting, New York, NY, USA, 16–18 November 1978. [Google Scholar]
- Clauss, G.F.; Riekert, T. Operational limitations of offshore crane vessels. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 7–10 May 1990; OnePetro: Richardson, TX, USA, 1990. [Google Scholar]
- Chu, Y.; Æsøy, V.; Zhang, H.; Bunes, O. Modelling and simulation of an offshore hydraulic crane. In Proceedings of the 28th European Conference on Modelling and Simulation ECMS, Brescia, Italy, 27–30 May 2014; pp. 87–93. [Google Scholar]
- Shuguang, L.; Qian, G.; Wenpu, Z. Research on active heave compensation for offshore crane. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1768–1772. [Google Scholar]
- Ismail, R.R.; That, N.D.; Ha, Q.P. Modelling and robust trajectory following for offshore container crane systems. Automat. Constr. 2015, 59, 179–187. [Google Scholar] [CrossRef]
- Kang, H.; Wu, Y.; Quen, L.K.; Tang, C.H.; Siow, C. Underwater target tracking of offshore crane system in subsea operations. In Proceedings of the 17th Asian Simulation Conference, Melaka, Malaysia, 27–29 August 2017; Springer: Singapore, 2017; pp. 126–137. [Google Scholar]
- Lee, D.; Kim, T.; Park, H.; Kim, Y. A study on the modeling and dynamic analysis of the offshore crane and payload. J. Korean Soc. Fish. Ocean. Technol. 2020, 56, 61–70. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Chen, H.; Fang, Y. Swing suppression and accurate positioning control for underactuated offshore crane systems suffering from disturbances. IEEE/CAA J. Autom. Sin. 2020, 7, 892–900. [Google Scholar] [CrossRef]
- Spathopoulos, M.P.; Fragopoulos, D. Pendulation control of an offshore crane. Int. J. Control 2004, 77, 654–670. [Google Scholar] [CrossRef]
- He, B.; Tang, W.; Cao, J. Virtual prototyping-based multibody systems dynamics analysis of offshore crane. Int. J. Adv. Manuf. Technol. 2014, 75, 161–180. [Google Scholar] [CrossRef]
- Fang, Y.; Wang, P.; Sun, N.; Zhang, Y. Dynamics analysis and nonlinear control of an offshore boom crane. IEEE Trans. Ind. Electron. 2014, 61, 414–427. [Google Scholar] [CrossRef]
- Chu, Y.; Æsøy, V.; Ehlers, S.; Zhang, H. Integrated multi-domain system modelling and simulation for offshore crane operations. Ship Technol. Res.=Schiffstech. 2015, 62, 36–46. [Google Scholar] [CrossRef]
- Shen, X.; Liu, S.; Zhang, C.; Bao, J. Intelligent material distribution and optimization in the assembly process of large offshore crane lifting equipment. Comput. Ind. Eng. 2021, 159, 107496. [Google Scholar] [CrossRef]
- Ye, J.; Roy, S.; Godjevac, M.; Reppa, V.; Baldi, S. Robustifying dynamic positioning of crane vessels for heavy lifting operation. IEEE/CAA J. Autom. Sin. 2021, 8, 753–765. [Google Scholar] [CrossRef]
- Fotland, G.; Haskins, C.; Rølvåg, T. Trade study to select best alternative for cable and pulley simulation for cranes on offshore vessels. Syst. Eng. 2020, 23, 177–188. [Google Scholar] [CrossRef]
- Saghafi Zanjani, M.; Mobayen, S. Anti-sway control of offshore crane on surface vessel using global sliding mode control. Int. J. Control 2022, 95, 2267–2278. [Google Scholar] [CrossRef]
- Osiński, M.; Maczyński, A.; Wojciech, S. The influence of ship’s motion in regular wave on dynamics of an offshore crane. Arch. Mech. Eng. 2004, 51, 131–163. [Google Scholar]
- Sanfilippo, F.; Hatledal, L.I.; Zhang, H.; Rekdalsbakken, W.; Pettersen, K.Y. A wave simulator and active heave compensation framework for demanding offshore crane operations. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1588–1593. [Google Scholar]
- Nam, B.W.; Kim, N.W.; Hong, S.Y. Experimental and numerical study on coupled motion responses of a floating crane vessel and a lifted subsea manifold in deep water. Int. J. Nav. Arch. Ocean 2017, 9, 552–567. [Google Scholar] [CrossRef]
- Cibicik, A.; Egeland, O. Determination of constraint forces for an offshore crane on a moving base. In Proceedings of the 2018 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 233–240. [Google Scholar]
- Chen, H.; Sun, N. An output feedback approach for regulation of 5-DOF offshore cranes with ship yaw and roll perturbations. IEEE Trans. Ind. Electron. 2021, 69, 1705–1716. [Google Scholar] [CrossRef]
- Than, T.K.; Langen, I.; Birkeland, O. Modelling and simulation of offshore crane operations on a floating production vessel. In Proceedings of the Twelfth International Offshore and Polar Engineering Conference, Kitakyushu, Japan, 26–31 May 2002; OnePetro: Richardson, TX, USA, 2002. [Google Scholar]
- Hannan, M.A.; Bai, W. Analysis of nonlinear dynamics of fully submerged payload hanging from offshore crane vessel. Ocean Eng. 2016, 128, 132–146. [Google Scholar] [CrossRef]
- Ye, J.; Godjevac, M.; Baldi, S.; Hopman, H. Joint estimation of vessel position and mooring stiffness during offshore crane operations. Automat. Constr. 2019, 101, 218–226. [Google Scholar] [CrossRef]
- Zhao, Y.; Cheng, Z.; Gao, Z.; Sandvik, P.C.; Moan, T. Numerical study on the feasibility of offshore single blade installation by floating crane vessels. Mar. Struct. 2019, 64, 442–462. [Google Scholar] [CrossRef]
- Farhan, R.A.; Djatmiko, E.B.; Murdjito, M.; Ghofur, A. Experimental study and numerical analysis of crane operability in floating crane catamaran. Int. J. Offshore Coast. Eng. (IJOCE) 2021, 5, 50–57. [Google Scholar] [CrossRef]
- Landsverk, R.; Zhou, J.; Hovland, G.; Zhang, H. Modeling of Offshore Crane and Marine Craft in Wave Motion. In Proceedings of the 2020 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 9–13 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1463–1470. [Google Scholar]
- Chakrabarti, S. Empirical calculation of roll damping for ships and barges. Ocean Eng. 2001, 28, 915–932. [Google Scholar] [CrossRef]
- Orcina. OrcaFlex Manual. 2015. Available online: http://www.orcina.com/SoftwareProducts/OrcaFlex/Validation/index/.pdf (accessed on 1 January 2015).
- Aoheds. Flexcom Manual. 2018. Available online: https://www.flexcomonline.com/applications/ (accessed on 1 January 2018).
- Denzler, J.; Hinz, A.M. Catenaria vera-the true catenary. Expo. Math. 1999, 17, 117–142. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segmented Node | Calculation Results (KN) | Difference (%) |
|---|---|---|
| 10 | 19.91354 | 0.2100 |
| 20 | 19.86744 | 0.0220 |
| 30 | 19.86977 | 0.0103 |
| 40 | 19.87066 | 0.0058 |
| 60 | 19.87130 | 0.0026 |
| 120 | 19.87168 | 0.0006 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Zhao, B.; Zhu, K.; Jiang, H. Dynamic Analysis of Full-Circle Swinging Hoisting Operation of a Large Revolving Offshore Crane Vessel under Different Wave Directions. J. Mar. Sci. Eng. 2023, 11, 197. https://doi.org/10.3390/jmse11010197
Zhang D, Zhao B, Zhu K, Jiang H. Dynamic Analysis of Full-Circle Swinging Hoisting Operation of a Large Revolving Offshore Crane Vessel under Different Wave Directions. Journal of Marine Science and Engineering. 2023; 11(1):197. https://doi.org/10.3390/jmse11010197
Chicago/Turabian StyleZhang, Dapeng, Bowen Zhao, Keqiang Zhu, and Haoyu Jiang. 2023. "Dynamic Analysis of Full-Circle Swinging Hoisting Operation of a Large Revolving Offshore Crane Vessel under Different Wave Directions" Journal of Marine Science and Engineering 11, no. 1: 197. https://doi.org/10.3390/jmse11010197
APA StyleZhang, D., Zhao, B., Zhu, K., & Jiang, H. (2023). Dynamic Analysis of Full-Circle Swinging Hoisting Operation of a Large Revolving Offshore Crane Vessel under Different Wave Directions. Journal of Marine Science and Engineering, 11(1), 197. https://doi.org/10.3390/jmse11010197