
Fixed-Time Formation Control for Unmanned Surface Vehicles with Parametric Uncertainties and Complex Disturbance


Abstract
:1. Introduction
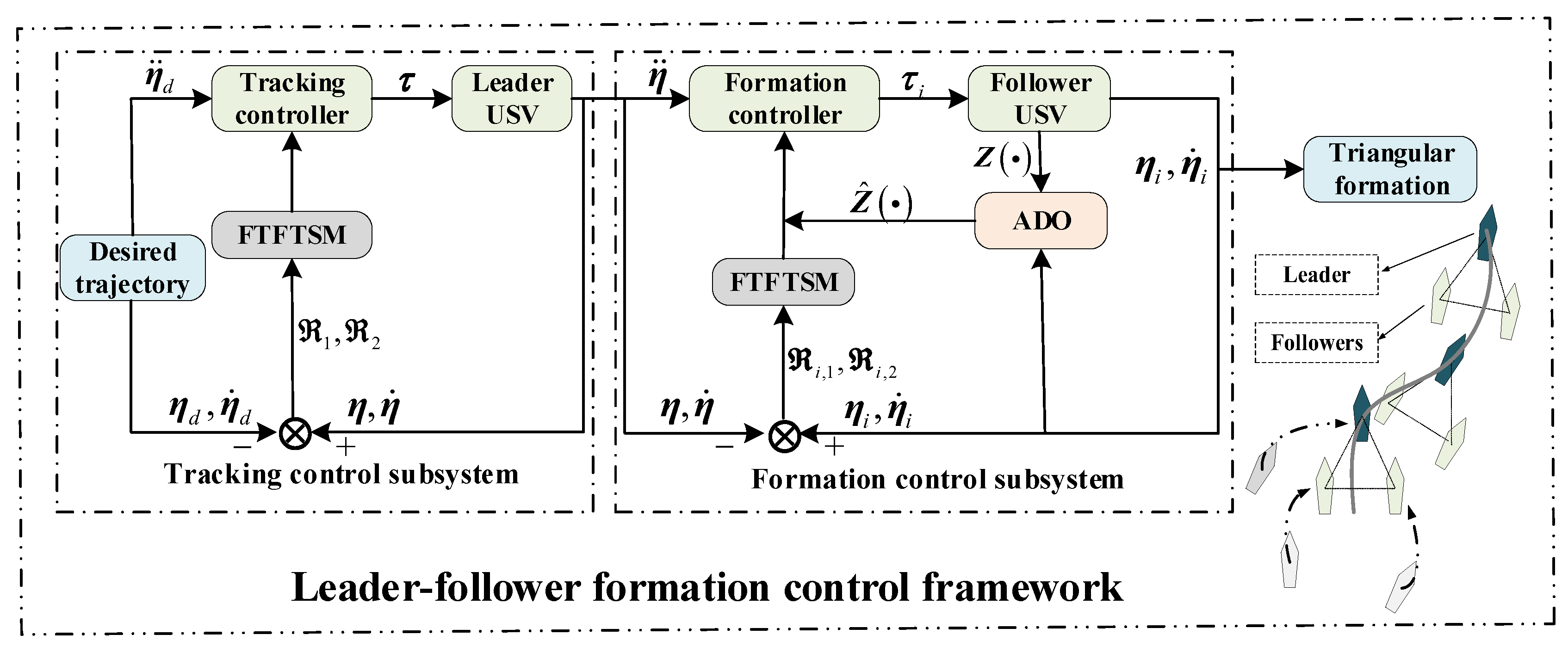
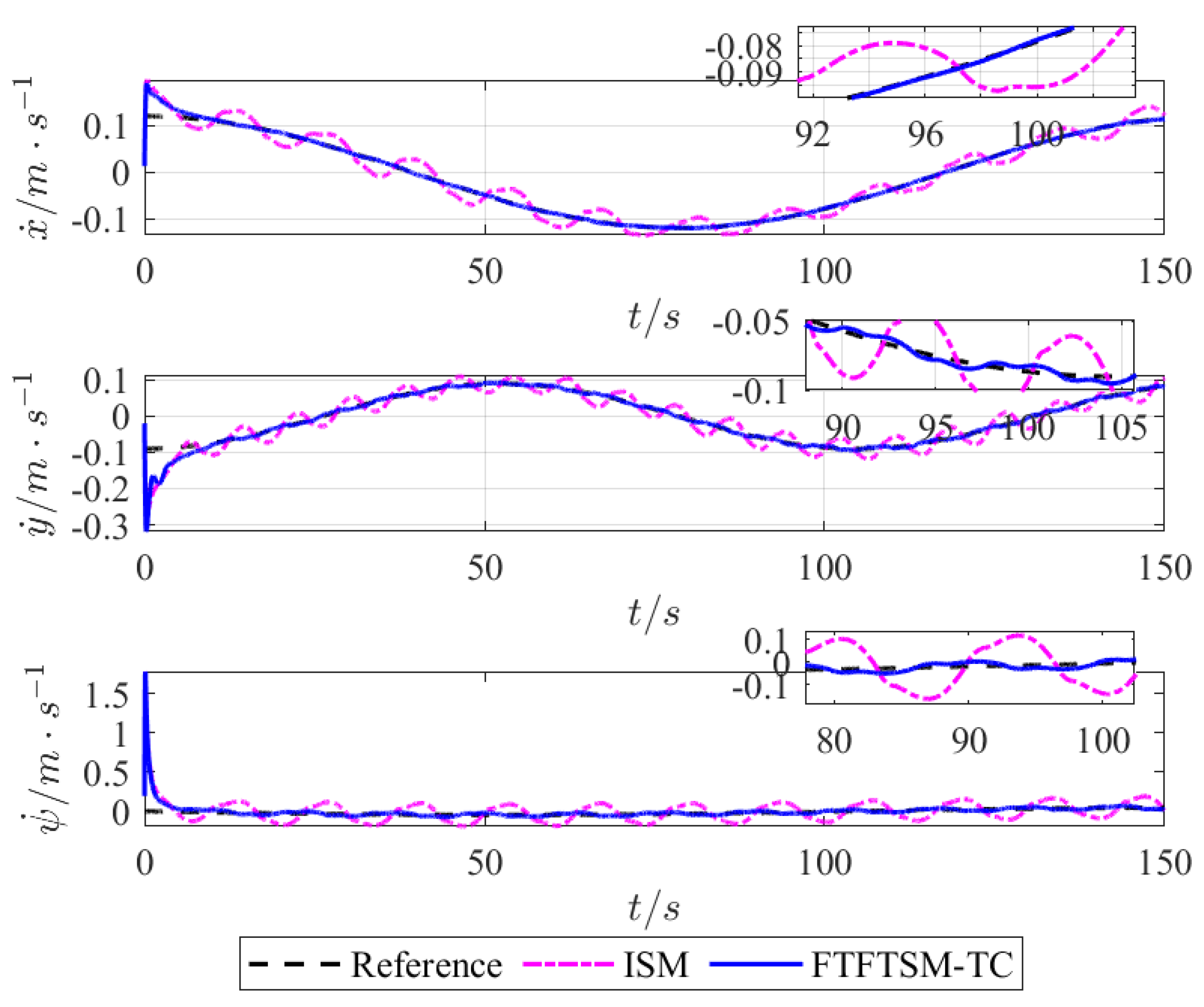
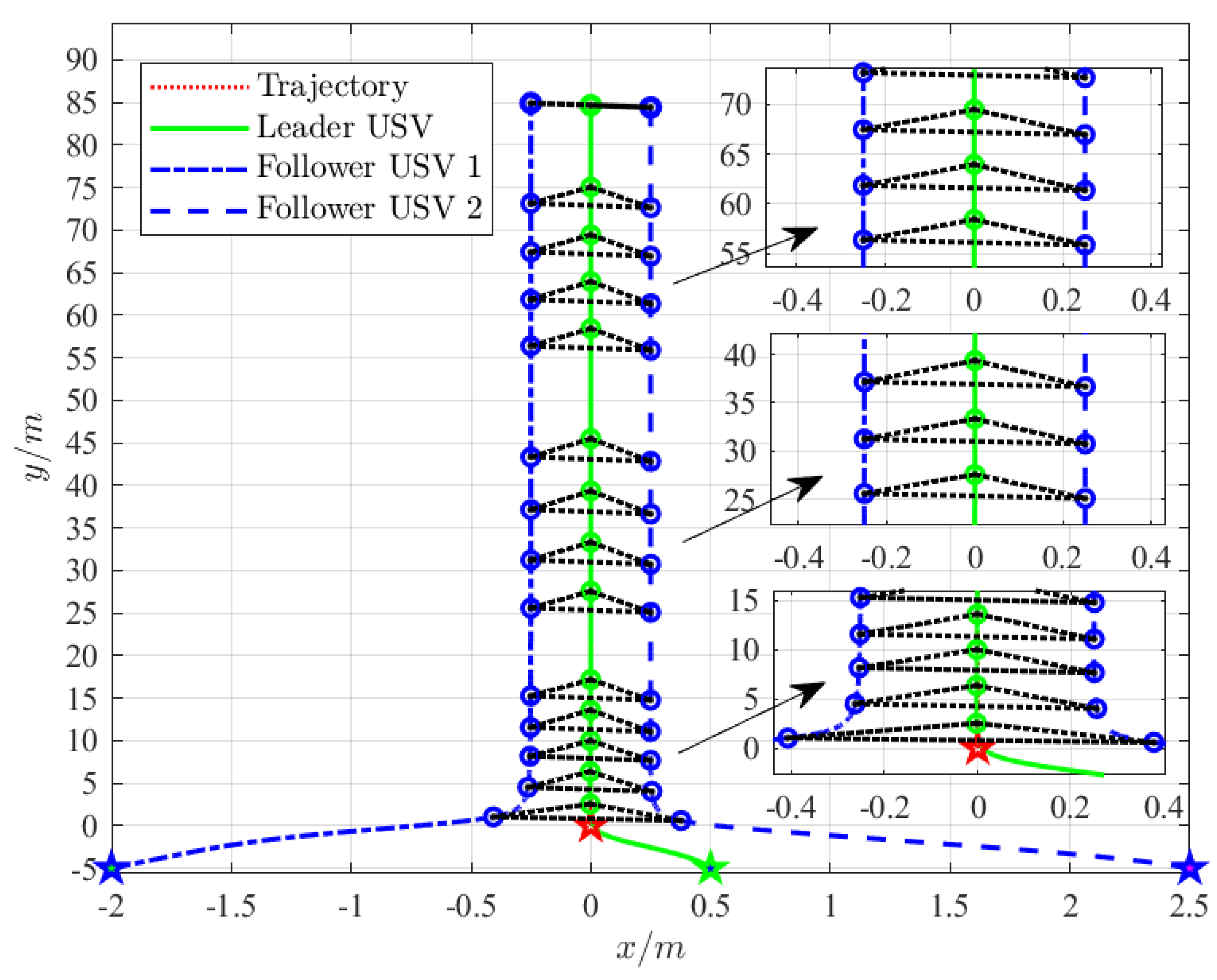
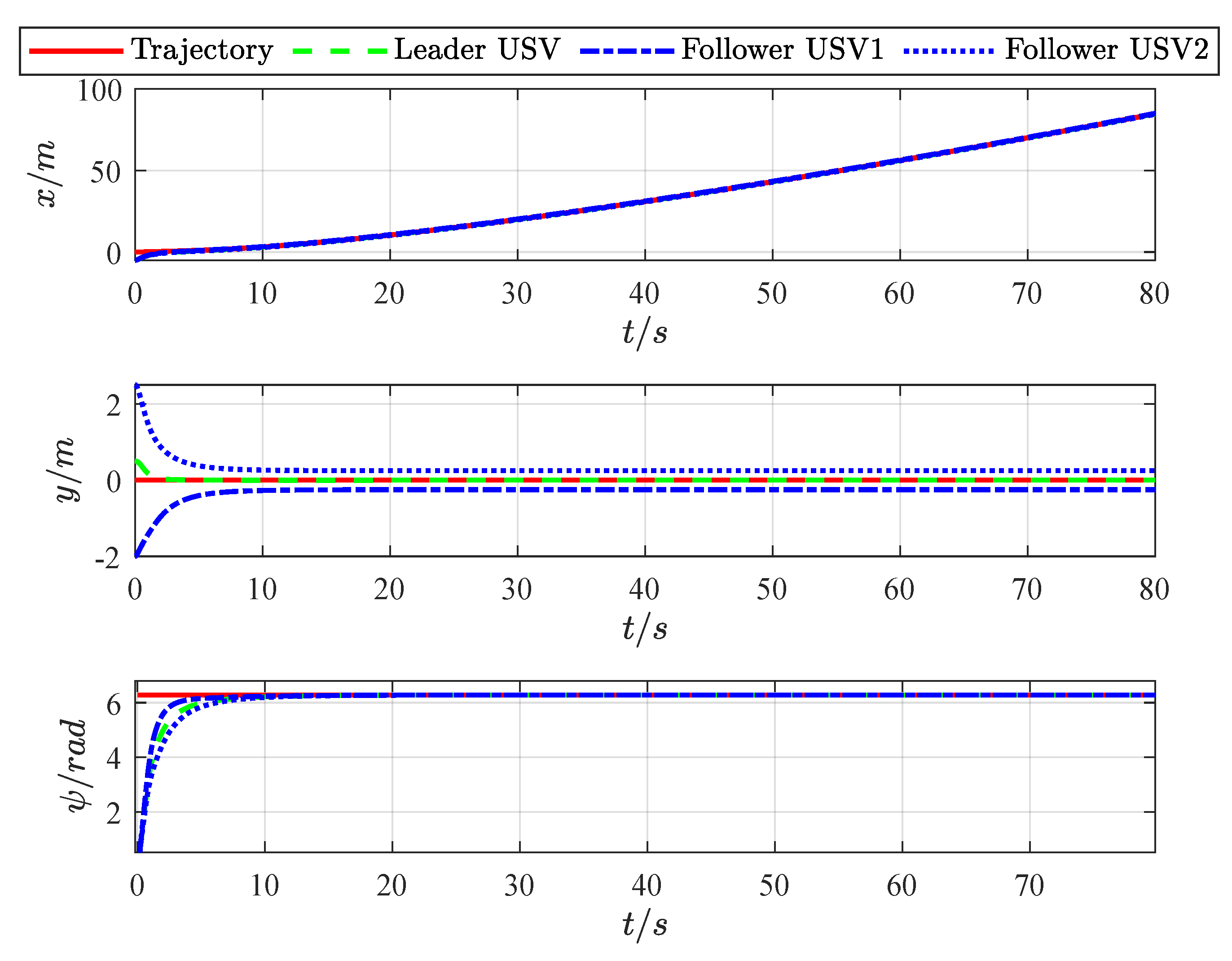
- Aiming at solving the formation control problem of USVs under complex disturbances, the overall formation control framework is divided into tracking and formation control subsystems. Then, we design the FTFTSM-TC strategy and ADO-FTFC strategy. On the basis of simplifying the formation control structure, the convergence rate and control accuracy of the system are greatly improved by the proposed method, and the convergence rate of the system is shown to be independent of the initial state of the system (Section 3.1).
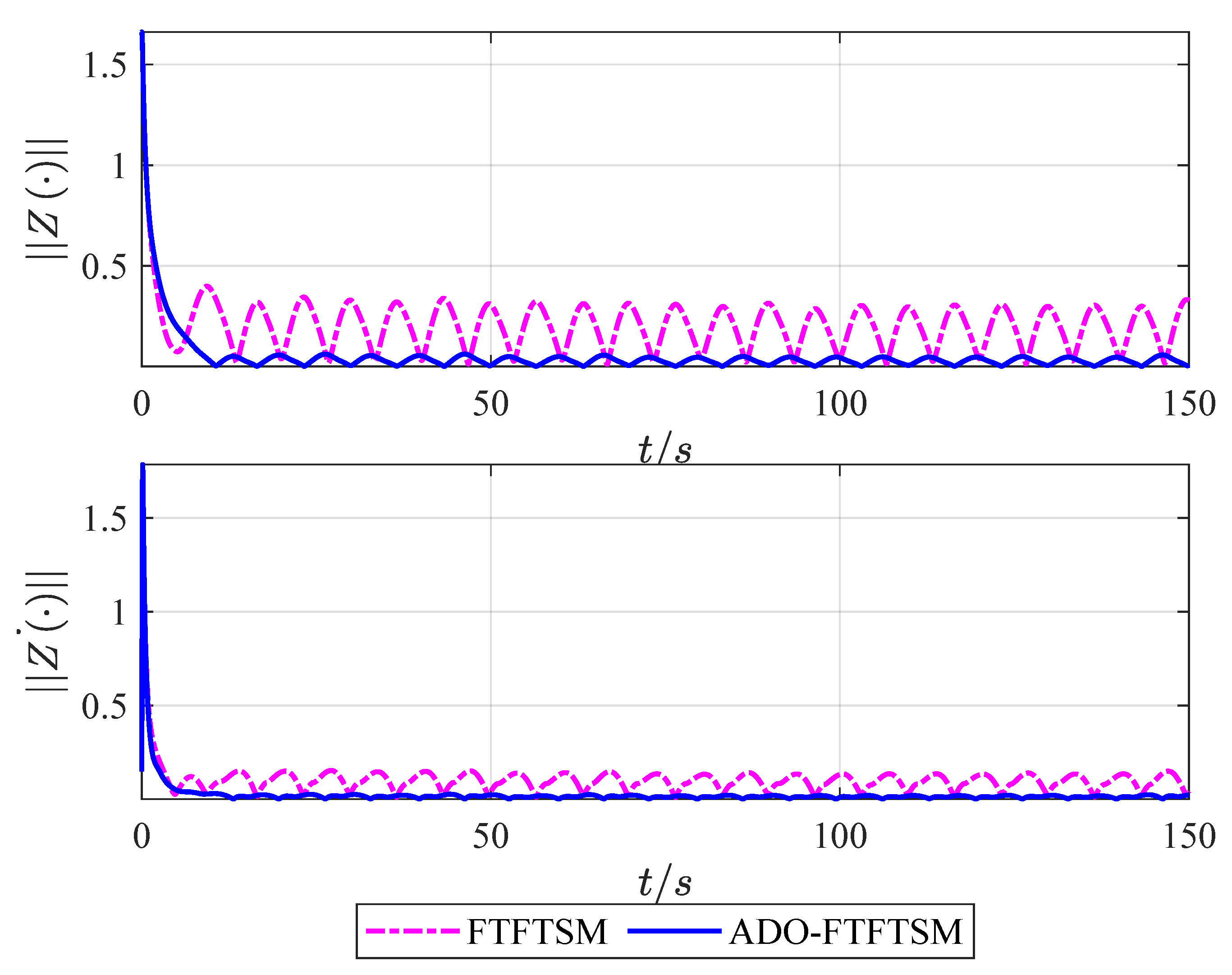
- In order to improve the disturbance observation accuracy of the formation control system, we design an ADO to achieve real-time control of disturbances and perform accurate observation of the lumped uncertainty item efficiently in the formation control system (Section 3.2).
2. Preliminaries and Problem Formulation
2.1. Preliminaries
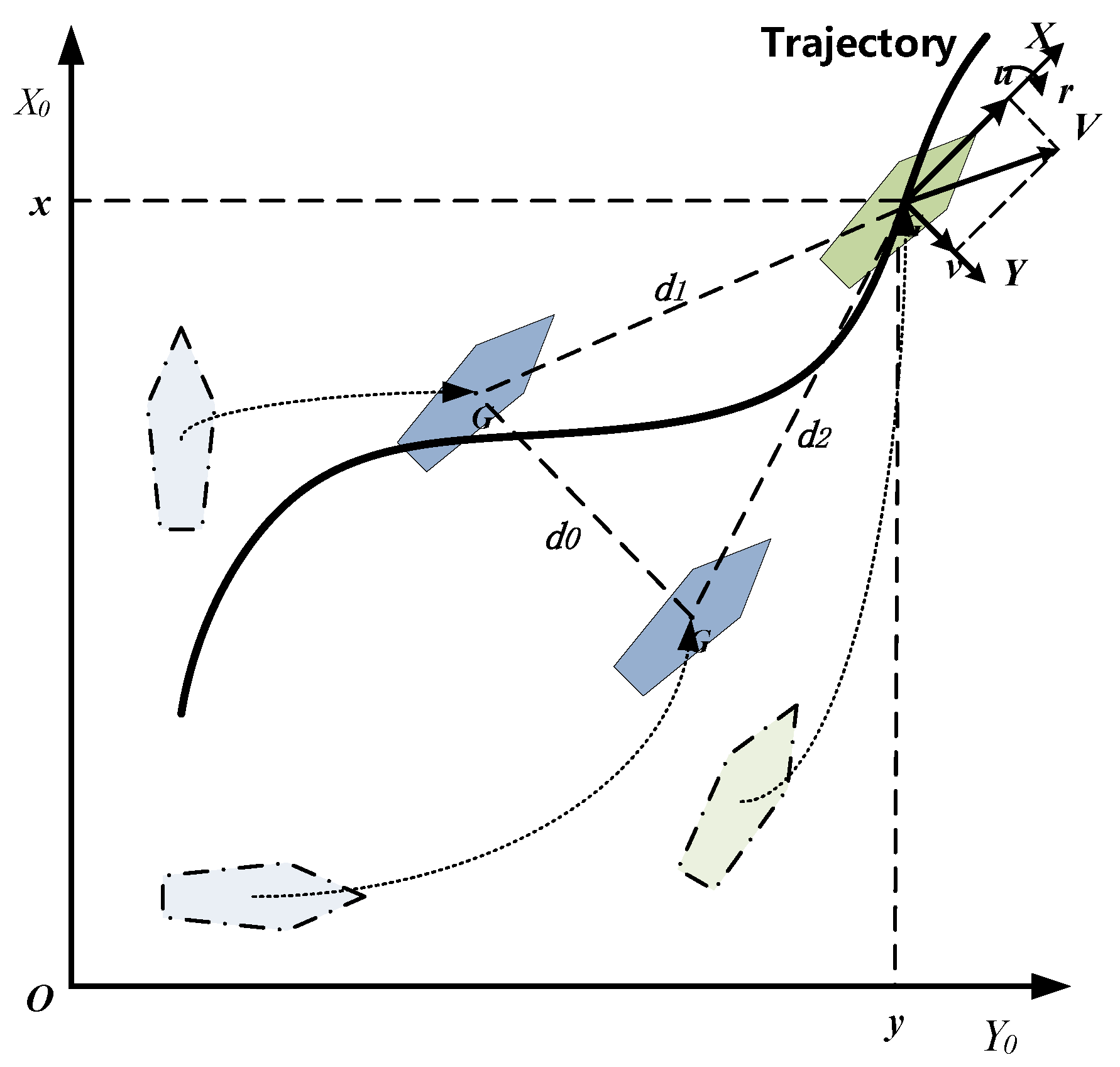
2.2. Problem Formulation
3. Design of the Proposed Controller
3.1. Tracking Control Subsystem
3.2. Formation Control Subsystem
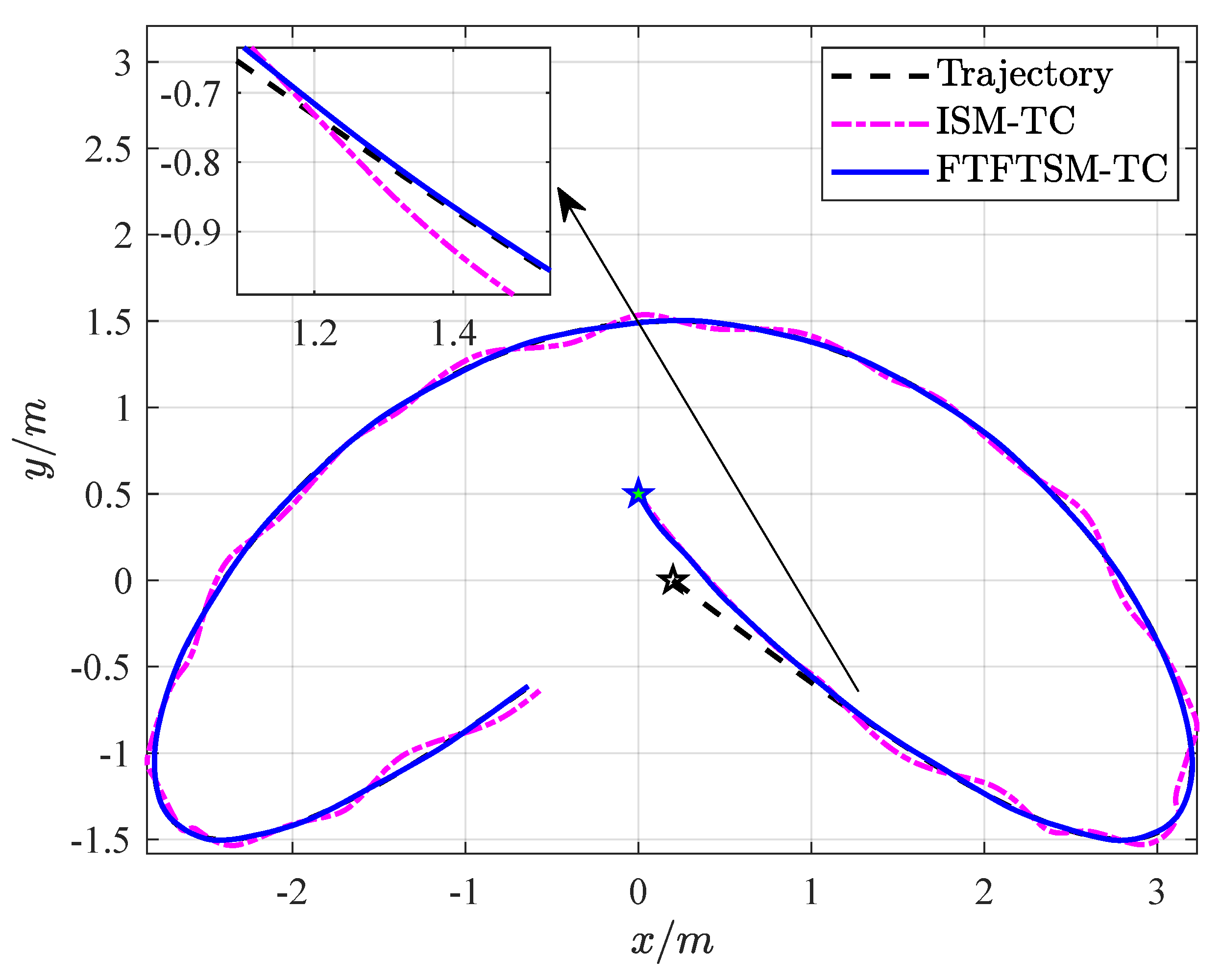
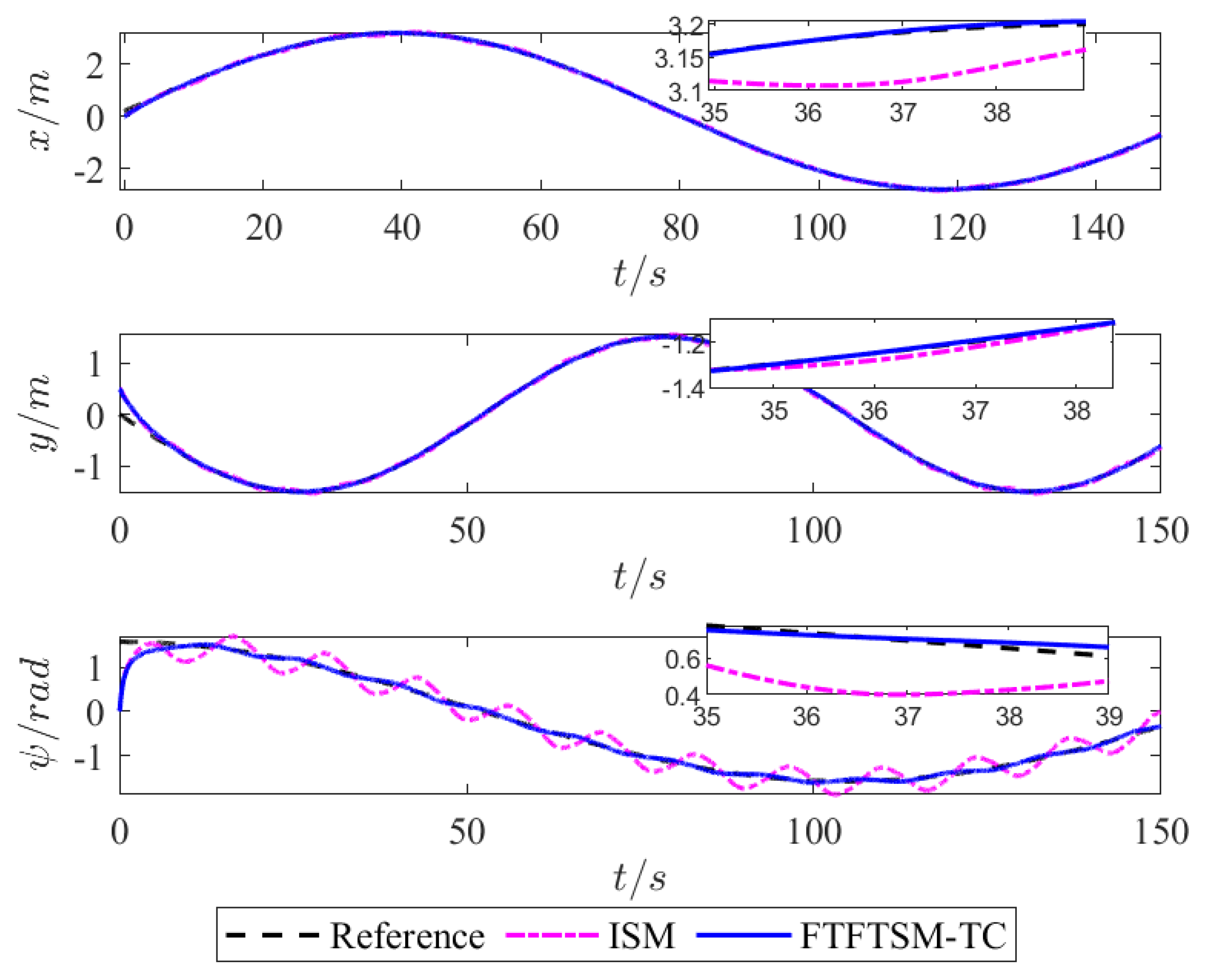
4. Simulation and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, D.; Zhang, J.D.; Li, Z.K. A novel fixed-time trajectory tracking strategy of unmanned surface vessel based on the fractional sliding mode control method. Electronics 2022, 11, 726. [Google Scholar] [CrossRef]
- Ning, W.; Choon, K.A. Coordinated trajectory tracking control of a marine aerial-surface heterogeneous system. IEEE/ASME Trans. Mechatron. 2021, 26, 3198–3210. [Google Scholar]
- Mu, D.D.; Wang, G.F.; Fan, Y.S. Tracking control of podded propulsion unmanned surface vehicle with unknown dynamics and disturbance under input saturation. Int. J. Control Autom. 2020, 16, 1905–1915. [Google Scholar] [CrossRef]
- Yan, X.; Jiang, D.P.; Miao, R.L.; Li, Y.L. Formation control and obstacle avoidance algorithm of a multi-usv system based on virtual structure and artificial potential field. J. Mar. Sci. Eng. 2021, 9, 161. [Google Scholar] [CrossRef]
- Garcia-Aunon, P.; del Cerro, J.; Barrientos, A. Behavior-based control for an aerial robotic swarm in surveillance missions. Sensors 2019, 19, 4584. [Google Scholar] [CrossRef]
- He, S.D.; Wang, M.; Dai, S.S.; Luo, F. Leader–follower formation control of usvs with prescribed performance and collision avoidance. IEEE Trans. Ind. Inform. 2019, 15, 572–581. [Google Scholar] [CrossRef]
- Han, T.; Guan, Z.H.; Chi, M.; Hu, B.; Li, T.; Zhang, X.H. Multi-formation control of nonlinear leader-following multi-agent systems. ISA Trans. 2017, 69, 140–147. [Google Scholar] [CrossRef]
- Tan, G.G.; Zhuang, J.Y.; Zou, J.; Wei, L.; Sun, Z.Y. Artificial potential field-based swarm finding of the unmanned surface vehicles in the dynamic ocean environment. Int. J. Adv. Robot. Syst. 2020, 17, 1–16. [Google Scholar] [CrossRef]
- Ning, W.; Yu, H.Z.; Choon, K.A. Autonomous pilot of unmanned surface vehicles: Bridging path planning and tracking. IEEE Trans. Veh. Technol. 2021, 71, 2358–2374. [Google Scholar] [CrossRef]
- Pan, Y.P.; Yang, C.G.; Pan, L.; Yu, H.Y. Integral sliding mode control: Performance, modification and improvement. IEEE Trans. Ind. Inform. 2018, 14, 52–62. [Google Scholar] [CrossRef]
- Pai, M.C. Observer-based adaptive sliding mode control for nonlinear uncertain state-delayed systems. Int. J. Control. Autom. Syst. 2009, 7, 536–544. [Google Scholar] [CrossRef]
- Song, J.H.; Song, S.M.; Zhou, H.B. Adaptive nonsingular fast terminal sliding mode guidance law with impact angle constraints. Int. J. Control. Autom. 2016, 14, 99–114. [Google Scholar] [CrossRef]
- Sun, L.H.; Wang, W.H.; Yi, R.; Xiong, S.F. A novel guidance law using fast terminal sliding mode control with impact angle constraints. ISA Trans. 2016, 64, 12–23. [Google Scholar] [CrossRef] [PubMed]
- Alattas, K.A.; Mobayen, S.; Din, S.U.; Asad, J.H.; Fekih, A.; Assawinchaichote, W.; Vu, M.T. Design of a non-singular adaptive integral-type finite time tracking control for nonlinear systems with external disturbances. IEEE Access 2021, 9, 102091–102103. [Google Scholar] [CrossRef]
- Mofid, O.; Amirkhani, S.; Din, S.U.; Mobayen, S.; Vu, M.T.; Assawinchaichote, W. Finite-time convergence of perturbed nonlinear systems using adaptive barrier-function nonsingular sliding mode control with experimental validation. J. Vib. Control. 2022. [Google Scholar] [CrossRef]
- Alattas, K.A.; Vu, M.T.; Mofid, O.; El-Sousy, F.F.M.; Alanazi, A.K.; Awrejcewicz, J.; Mobayen, S. Adaptive nonsingular terminal sliding mode control for performance improvement of perturbed nonlinear systems. Mathematics 2022, 10, 1064. [Google Scholar] [CrossRef]
- Valiollah, G.; Saleh, M.; Sami, U.D.; Thaned, R.; Mai, T.V. Robust tracking composite nonlinear feedback controller design for time-delay uncertain systems in the presence of input saturation. ISA Trans. 2022; in press. [Google Scholar]
- Ning, W.; Ying, G.; Xue, F.Z. Data-driven performance-prescribed reinforcement learning control of an unmanned surface vehicle. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5456–5467. [Google Scholar]
- Huang, C.F.; Zhang, X.K.; Zhang, G.Q. Improved decentralized finite-time formation control of underactuated usvs via a novel disturbance observer. Ocean Eng. 2019, 174, 117–124. [Google Scholar] [CrossRef]
- Liu, X.W.; Chen, T.P. Finite-time and fixed-time cluster synchronization with or without pinning control. IEEE Trans. Cybern. 2018, 48, 240–252. [Google Scholar] [CrossRef]
- Zuo, Z.Y.; Tian, B.L.; Defoort, M.; Ding, Z.T. Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics. IEEE Trans. Automat. Control 2018, 63, 563–570. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Fault-tolerant fixed-time trajectory tracking control of autonomous surface vessels with specified accuracy. IEEE Trans. Ind. Electron. 2020, 67, 4889–4899. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; He, H. Dynamics-Level finite-time fuzzy monocular visual servo of an unmanned surface vehicle. IEEE Trans. Ind. Electron. 2020, 67, 9648–9658. [Google Scholar] [CrossRef]
- Gu, N.; Peng, Z.H.; Wang, D.; Liu, L.; Jiang, Y. Nonlinear observer design for a robotic unmanned surface vehicle with experiment results. Appl. Ocean Res. 2020, 95, 102028. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation observer-based robust control using a multiple sliding surfaces for nonlinear systems with influences of matched and unmatched uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Rojsiraphisal, T.; Mobayen, S.; Asad, J.H.; Vu, M.T.; Chang, A.; Puangmalai, J. Fast Terminal Sliding Control of Underactuated Robotic Systems Based on Disturbance Observer with Experimental Validation. Mathematics 2021, 9, 1935. [Google Scholar] [CrossRef]
- Wang, N.; Deng, Z.C. Finite-time fault estimator based fault-tolerance control for a surface vehicle with input saturations. IEEE Trans. Ind. Inform. 2020, 16, 1172–1181. [Google Scholar] [CrossRef]
- Ning, W.; Shun, F.S. Finite-time unknown observer based interactive trajectory tracking control of asymmetric underactuated surface vehicles. IEEE Trans. Control Syst. Technol. 2021, 29, 794–803. [Google Scholar]
- Bhat, S.P.; Bernstein, D.S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef]
- Fu, J.J.; Wang, J.Z. Fixed-time coordinated tracking for second-order multi-agent systems with bounded input uncertainties. Syst. Control Lett. 2016, 93, 1–12. [Google Scholar] [CrossRef]
- Liu, Y.F.; Geng, Z.Y. Finite-time formation control for linear multi-agent systems: A motion planning approach. Syst. Control Lett. 2016, 85, 54–60. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| 9 | 5 | 3 | |||
| 5 | 1 | 1 | |||
| 0.1; 0.1 | 0.8; 0.6 | 0.7; 0.4 | |||
| p | 7 | q | 9 | ||
| 7/9 | 7/5 |
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| m | 23.8000 | −0.8612 | −2.0 | ||
| 1.7600 | −36.2823 | −10.0 | |||
| 0.460 | 0.1079 | 0.0 | |||
| −0.7225 | 0.1052 | 0.0 | |||
| −1.3274 | 5.0437 | −1.0 | |||
| −5.8664 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, H.; Yin, Y.; Qian, X. Fixed-Time Formation Control for Unmanned Surface Vehicles with Parametric Uncertainties and Complex Disturbance. J. Mar. Sci. Eng. 2022, 10, 1246. https://doi.org/10.3390/jmse10091246
Shen H, Yin Y, Qian X. Fixed-Time Formation Control for Unmanned Surface Vehicles with Parametric Uncertainties and Complex Disturbance. Journal of Marine Science and Engineering. 2022; 10(9):1246. https://doi.org/10.3390/jmse10091246
Chicago/Turabian StyleShen, Helong, Yong Yin, and Xiaobin Qian. 2022. "Fixed-Time Formation Control for Unmanned Surface Vehicles with Parametric Uncertainties and Complex Disturbance" Journal of Marine Science and Engineering 10, no. 9: 1246. https://doi.org/10.3390/jmse10091246
APA StyleShen, H., Yin, Y., & Qian, X. (2022). Fixed-Time Formation Control for Unmanned Surface Vehicles with Parametric Uncertainties and Complex Disturbance. Journal of Marine Science and Engineering, 10(9), 1246. https://doi.org/10.3390/jmse10091246