
State-of-the-Art Review of Vortex-Induced Motions of Floating Offshore Wind Turbine Structures

 ,
,  , , and
, , and 
Abstract
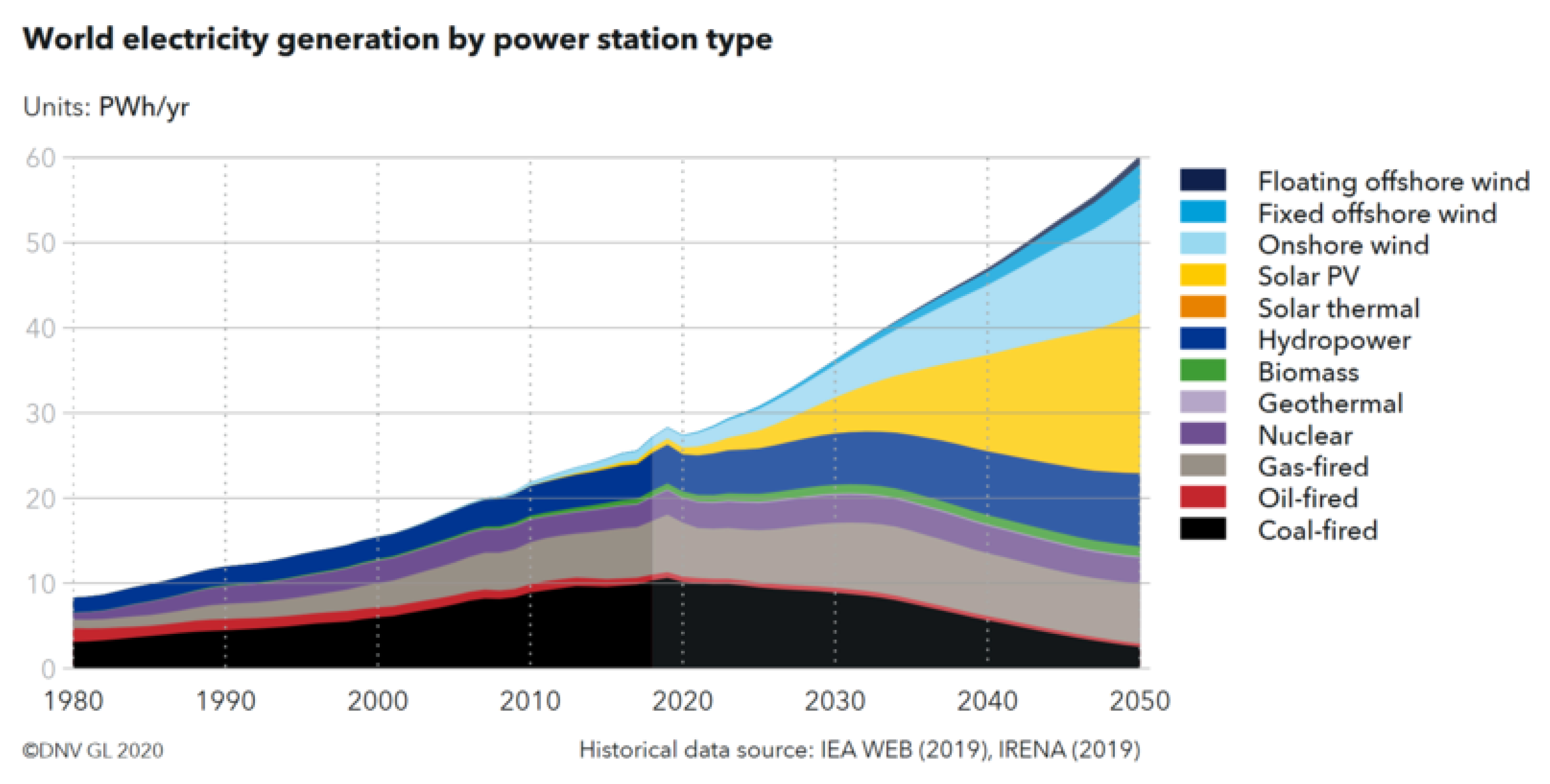
:1. Introduction
- Increase in the average in-line drag coefficient.
- Large low-frequency VIM motion amplitudes relative to the total floating substructure responses.
- Additional low-frequency oscillating mooring line tensions.
2. Theoretical Background
2.1. Reynolds Number
2.2. Strouhal Number
2.3. Keulegan–Carpenter Number
2.4. Reduced Velocity
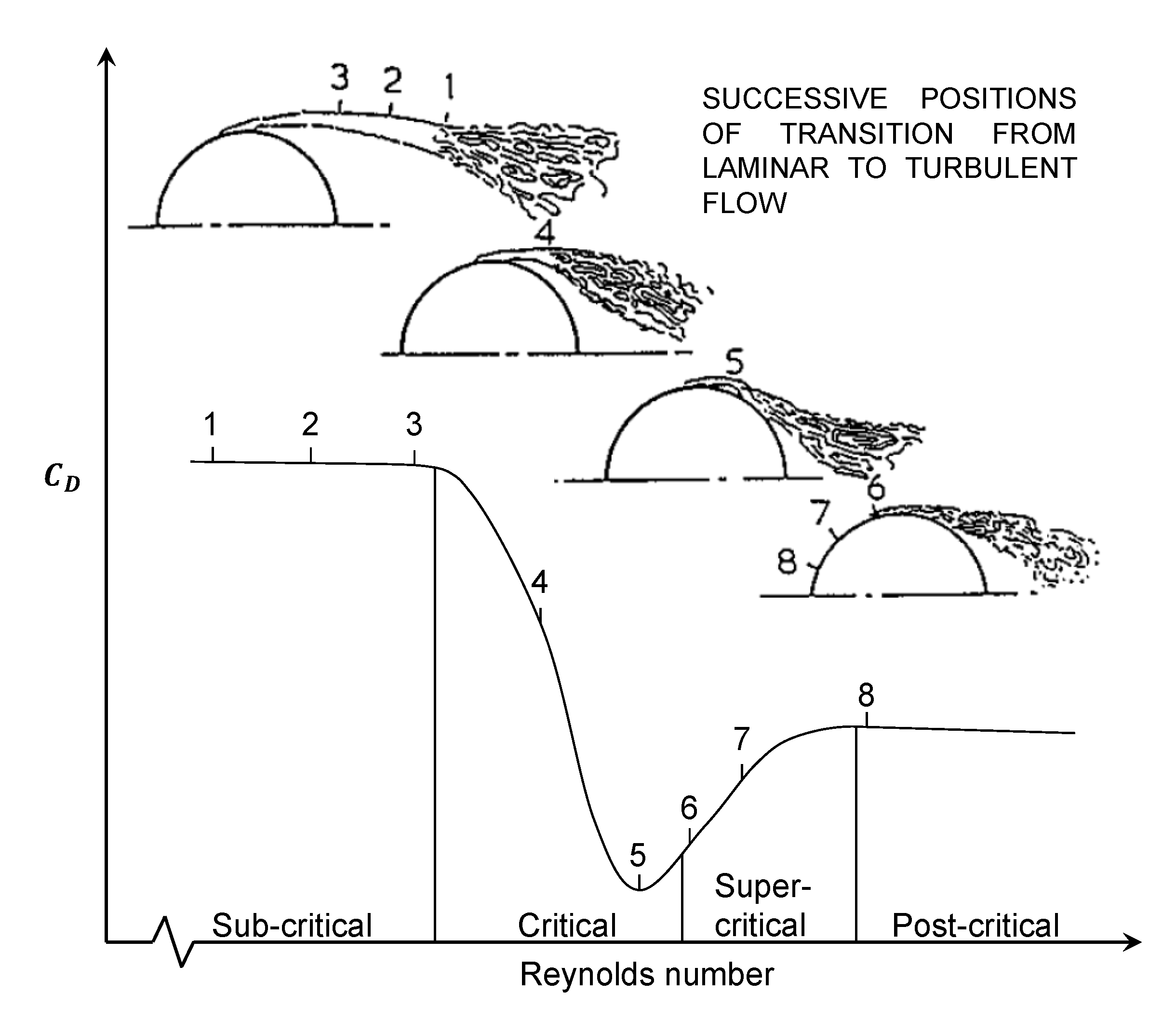
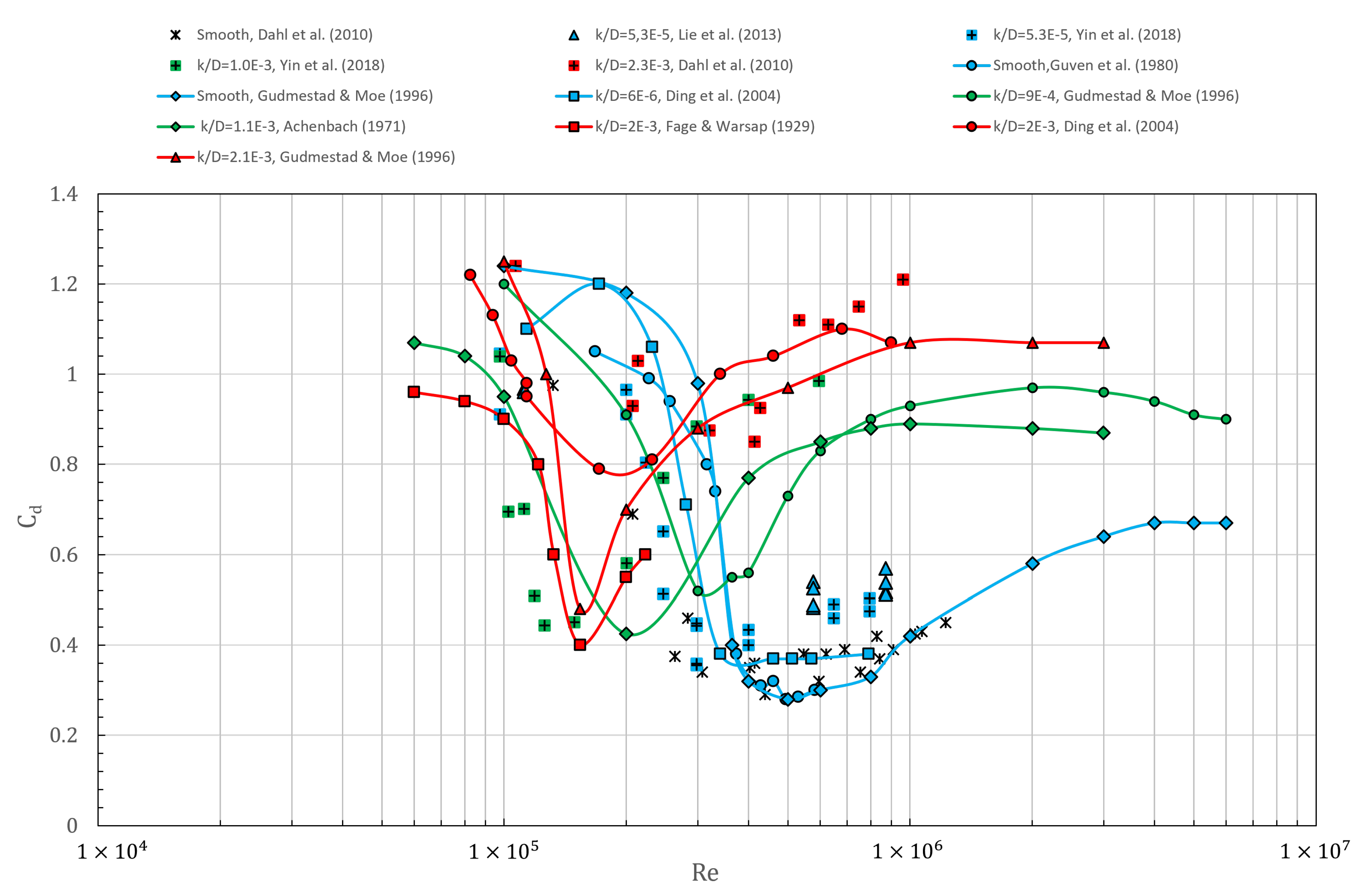
2.5. Drag Coefficient
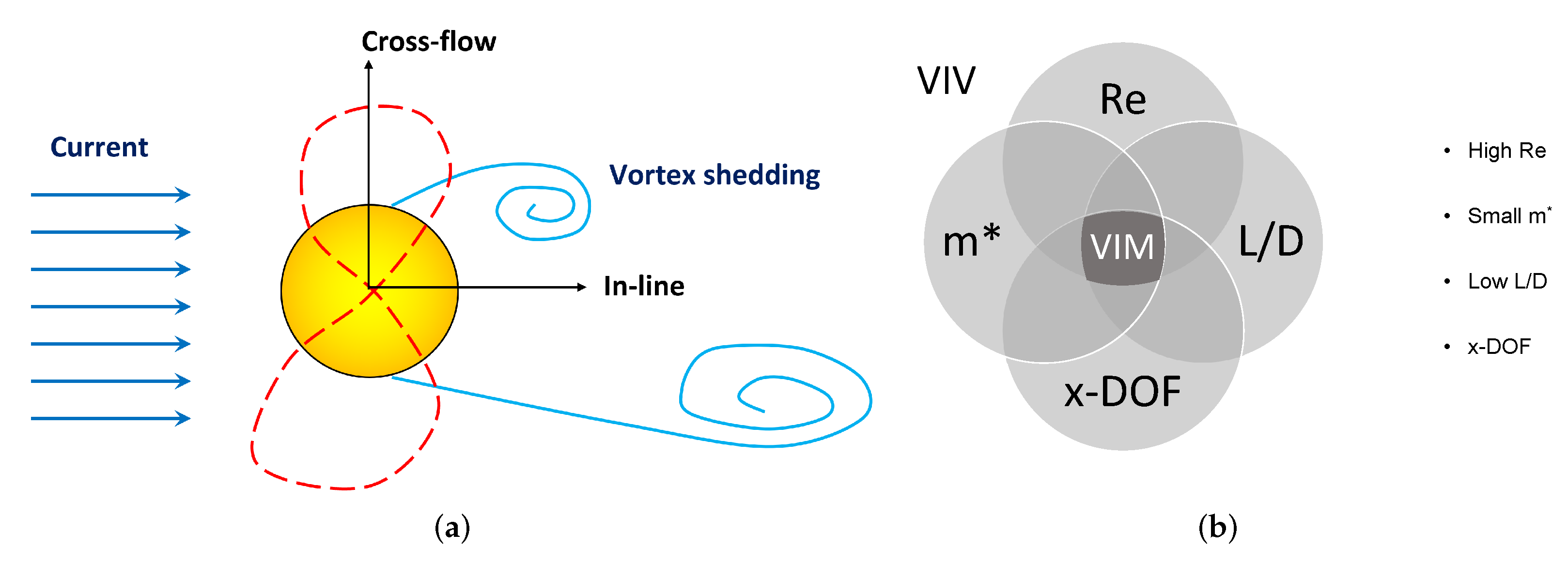
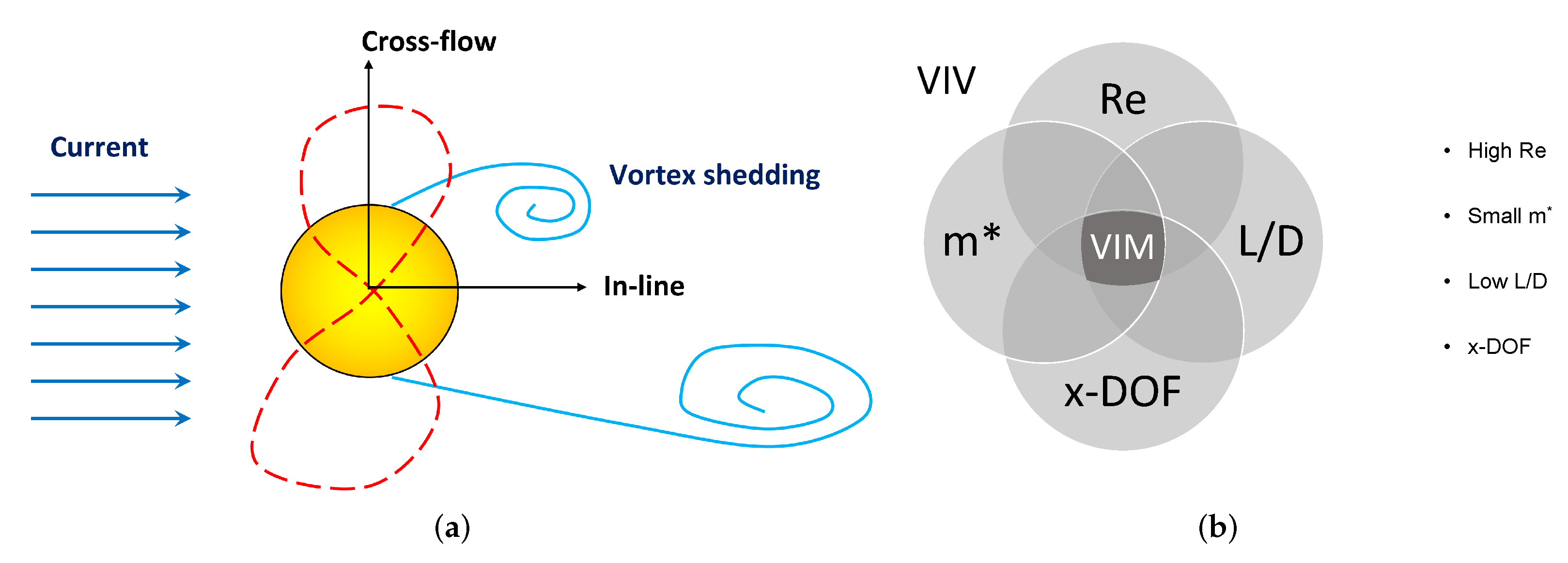
2.6. Vortex Shedding
2.7. Mass Ratio
2.8. Froude Number
2.9. Aspect Ratio
2.10. Damping
- Aerodynamic damping;
- Control damping;
- Mass or liquid dampers;
- Structure damping;
- Hydrodynamic damping;
- Soil damping.
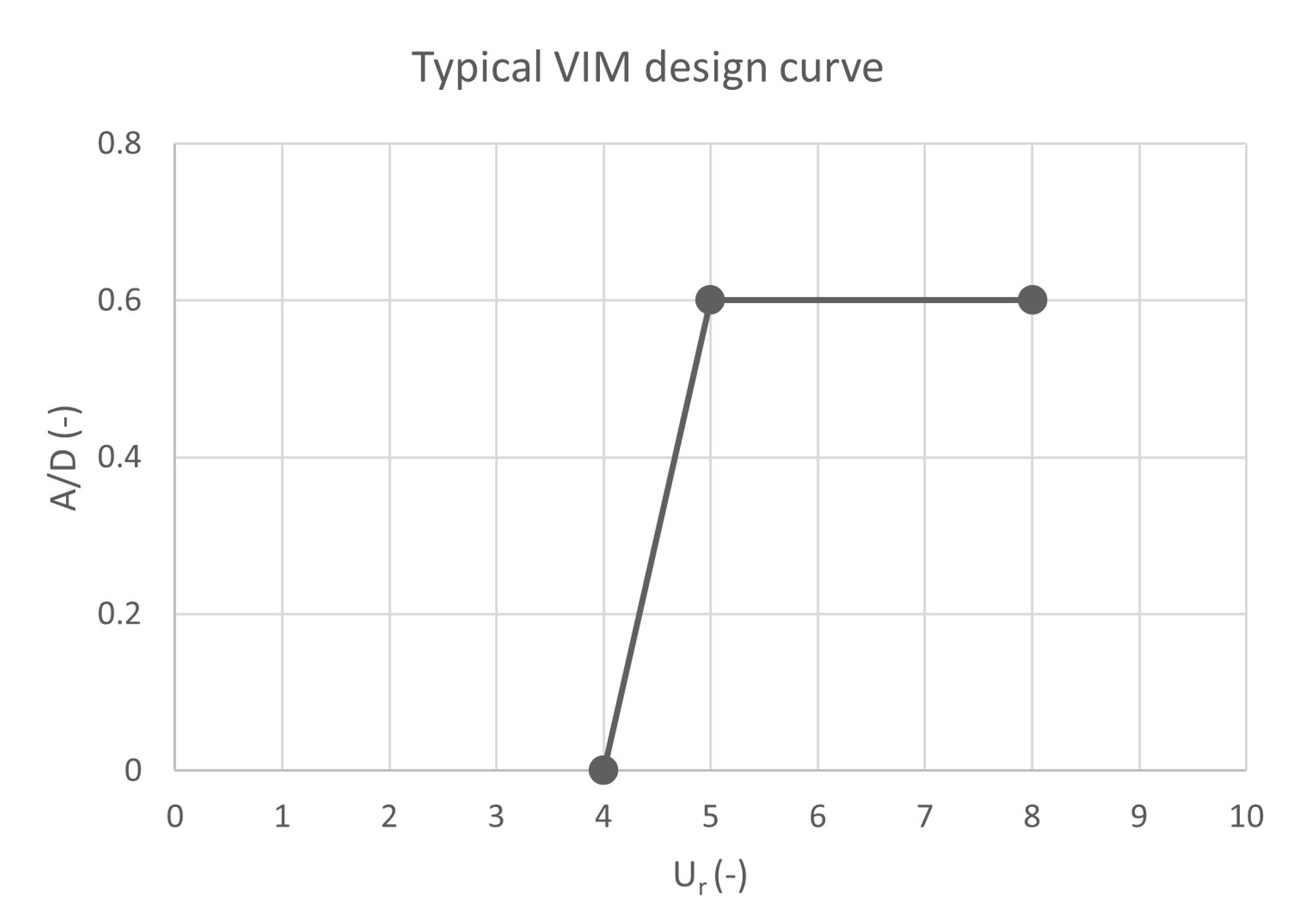
2.11. Response Amplitude
2.12. Response Frequency
2.13. Turbulence Intensity
3. Engineering Practice in Relation to VIM
- ‘DNV- RP-C205 Environmental Conditions and Environmental Loads’ [63] provides information on current modeling as well as VIV and VIM; for the latter two, see also section ’Dynamics and their Influence on Wind Turbine Performance’.
- ‘DNV- ST- 0119 Floating wind turbine structures’ [62] gives approaches to modeling wind and waves.
- ‘ISO19901-7 Specific requirements on station-keeping systems for floating offshore structures and mobile offshore units’ [58]
- The duration for peak current and resulting VIM can be much longer than the peak storm duration.
- The calibration of factor of safety (FoS) for mooring design does not include the spar VIM condition and the uncertainties associated with spar VIM. Consequently, sensitivity checks may be warranted.
4. Review of VIM Model Tests
4.1. Model Tests on Spar
- Reynolds number effects;
- Strake mitigation efficiency;
- Response frequency ratio;
- Coupling between VIM and roll, pitch;
- Effects of hull appurtenances.
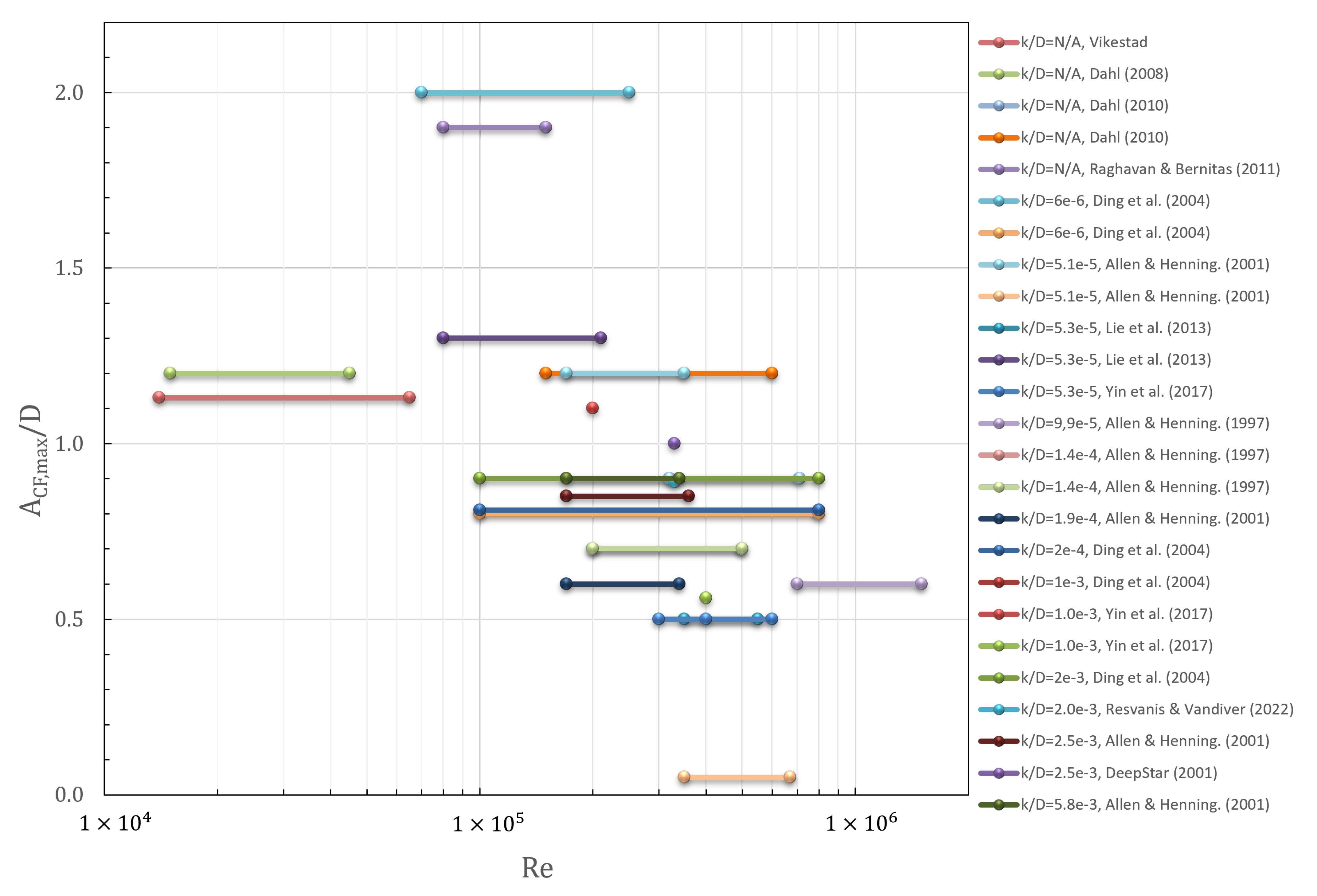
4.2. Model Tests on Rigid Circular Cylinders at High Reynolds Numbers
- The tests only includes pure CF motion but with a lack of IL motion.
- Different frequency ratios between IL and CF were not investigated at high Reynolds number tests. This is crucial for the VIM of FOWTs.
- Interaction between surface waves and currents has not been investigated at high Reynolds numbers.
4.3. Model Tests on Semi-Submersibles
5. Review of Numerical Studies of VIM
5.1. Numerical Simulation of FOWT
5.2. Application of CFD on VIM Study
- Details of the structure matter. It is practical to ignore some details simply because they may introduce unnecessarily additional work without bringing in equivalent gain, but this must be undertaken with caution. This has been discussed in the above-mentioned papers, and it turned out that by including or excluding some appurtenances on a spar installation, predictions can deviate a lot, and this is confirmed by several model tests [30,50,95]. Yet, choices must be made due to the compromises between cost and accuracy.
- Flow direction matters. This is straightforward, because when a spar is fully appended with strakes, chains, and pipes, the current from different directions will induce different levels of VIM.
- Each design is different, and special considerations are needed even with a commonly accepted practice. For example, as [116] has observed, whether or not flow separation is happening on the spar hull will rather strongly impact the final prediction.
Summary of Application of CFD on VIM Study
- Using CFD for VIM has been shown to be a promising approach both for spars and semi-submersibles. The comparisons presented above give confidence to the further application of CFD in the design phase, especially when the screening of preliminary designs is finished, and some promising candidates stand out. In this stage, running CFD simulations of these candidates will give more reliable force and VIM predictions than more simplified numerical tools, while also being a lot cheaper/faster compared to model tests.
- High-quality model test measurements form a solid basis to validate CFD modeling, providing the possibility to make a very detailed comparison and quality control.
- CFD provides flexibility to extract detailed forces/loads on segments, separated columns, and even some small structural details. This can be important for optimizations. Emphasis can also be put to access the pressure and wall shear stress plots on the structure, so instructive information is more easily extracted from CFD simulations for designers to identify where improvements can potentially be made.
- Detailed flow visualizations, especially in the wake, are accessible in CFD. This may be especially interesting for semi-submersibles. With the intuitive and detailed flow visualizations, physical insight in the fluid/vortex dynamics could be improved.
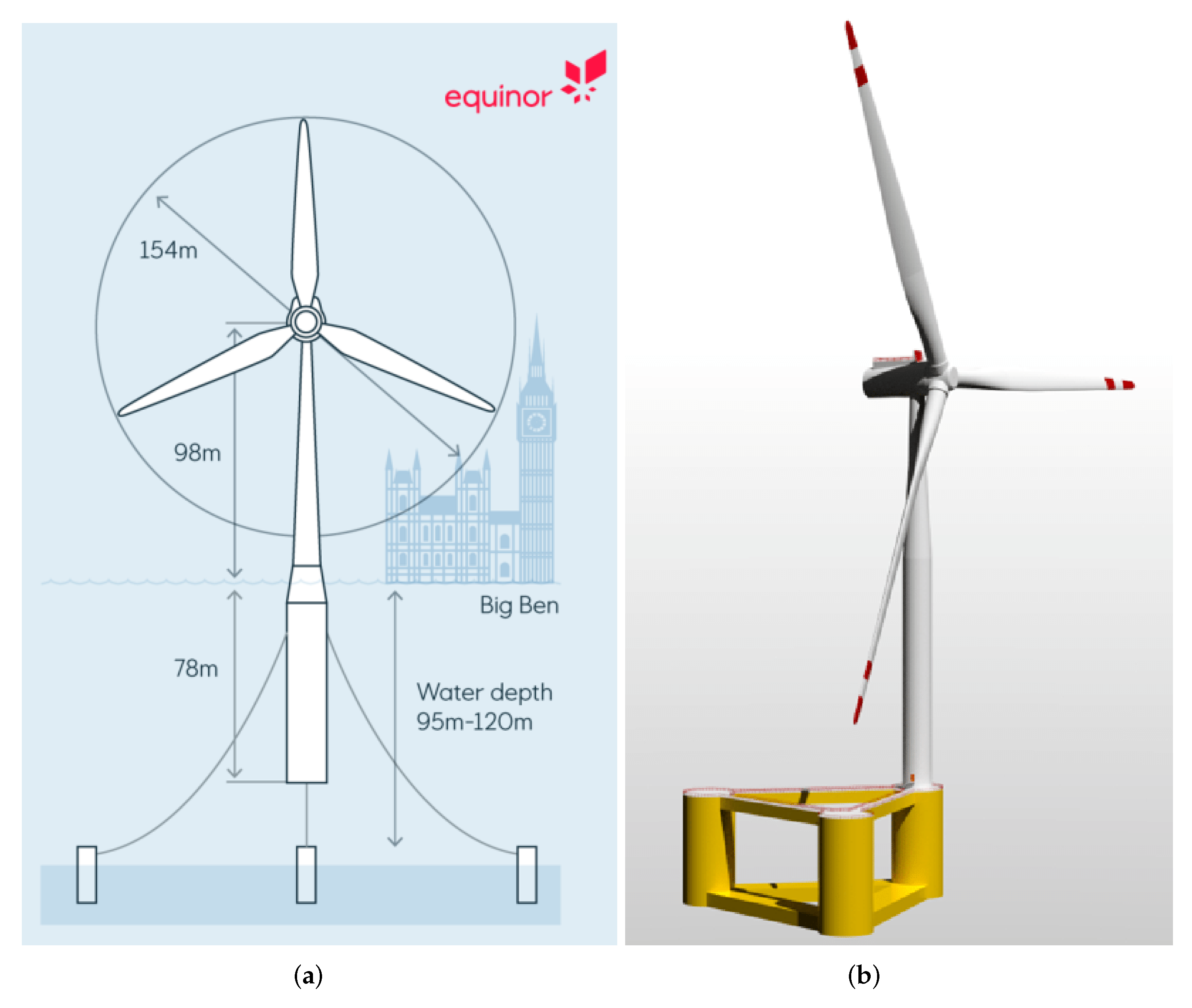
6. Review of Field Measurements of FOWTs
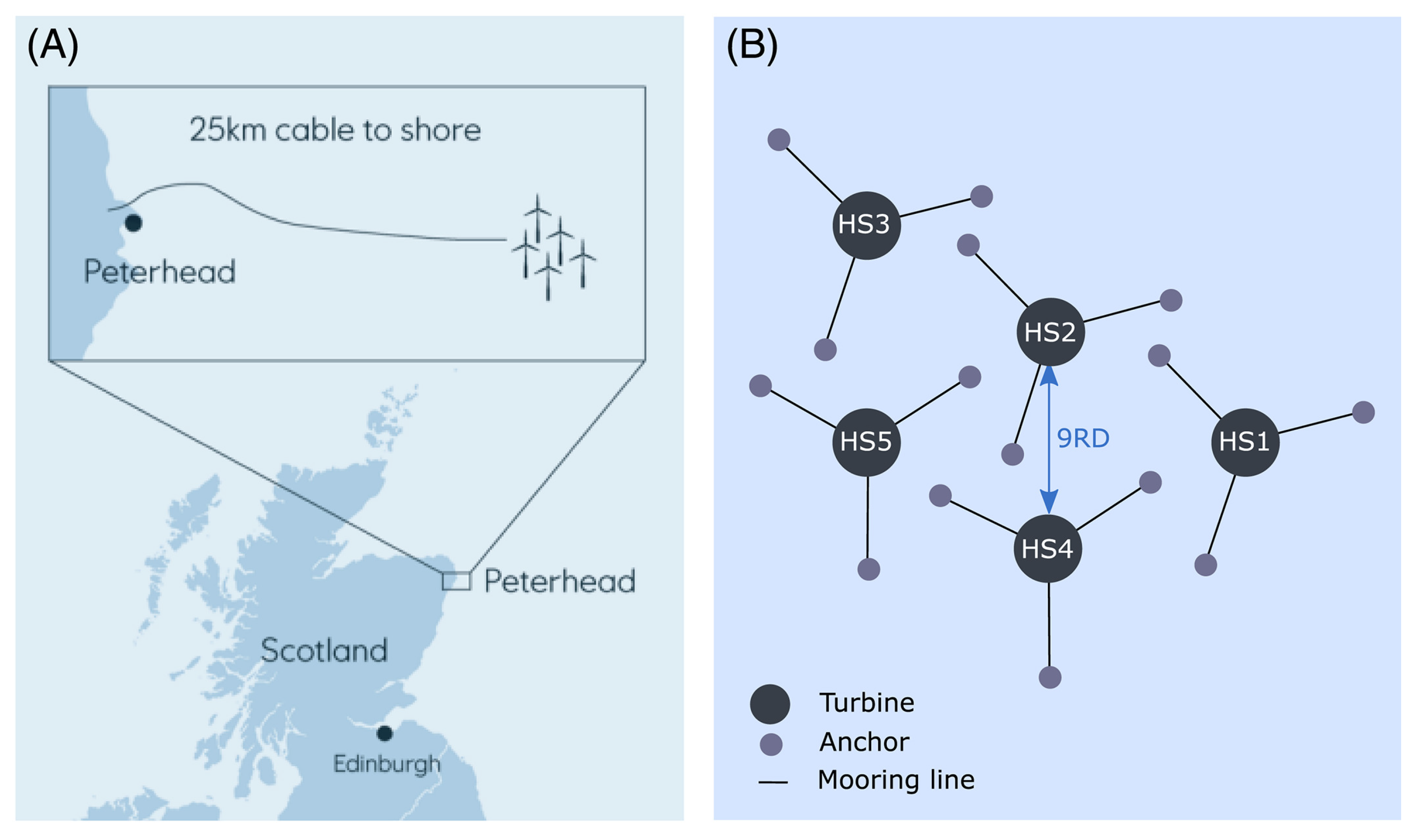
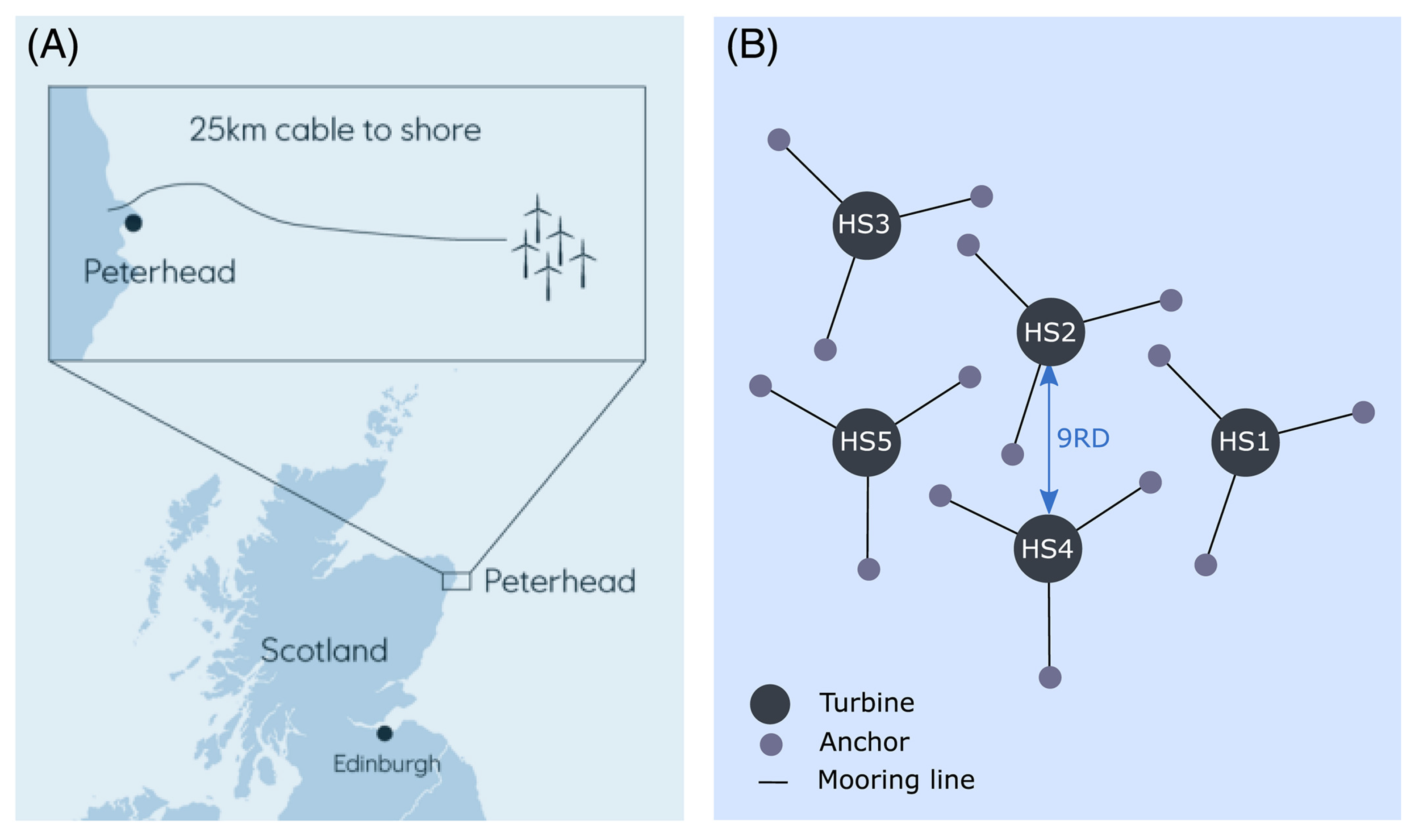
‘The Hywind Demo is a demonstration system that was installed and commissioned in Norway in 2009; it was the world’s first full-scale floating offshore wind turbine. The installed capacity of the demo system is 2.3 MW. The demo unit is located 10 km west of the island of Karmøy off the Norwegian west coast. The water depth is 220 m’
7. Conclusions
- Sophisticated model tests;
- Advanced numerical models;
- High-fidelity field measurement data;
- Application of data science.
- VIM model tests on integrated models (floater–mooring–subsea power cables) at small/moderate Reynolds numbers under representative sea states, investigating the coupling between VIM and other dynamic responses.
- Numerical case study on the model as mentioned above, and validation against model tests.
- Application of CFD on screening of VIM of FOWTs in early design phase prior to model tests. Trial cases on spar and semi-submersibles, validated against small-scale model tests mentioned above.
- Moderate Reynolds number two degree-of-freedom vortex-induced vibrations model testing to obtain hydrodynamic coefficients for circular cylinder: excitation coefficients, added mass coefficients, and drag coefficients.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| RIFLEX | Riser system analysis program developed by MARINTEK/SINTEF Ocean |
| SIMO | A time-domain simulation program for study of motions and station keeping of multi-body system, developed by MARINTEK/SINTEF Ocean |
| SIMA | Numerical workbench for marine operations and mooring analysis softwares, developed by MARINTEK/SINTEF Ocean |
| A | Amplitude |
| Significant wave height | |
| Density of fluid | |
| Vortex shedding frequency of a fixed cylinder in water, or Strouhal frequency | |
| Natural frequency | |
| In-line oscillation frequency | |
| Cross-flow oscillation frequency | |
| g | Gravity acceleration |
| k | Roughness height |
| Root-mean-square of the turbulent velocity fluctuations | |
| Projected area | |
| Aspect ratio, | |
| Mean drag coefficient | |
| D | Diameter |
| Mean drag force | |
| Froude number | |
| I | Turbulence intensity |
| Reynolds number | |
| Strouhal number | |
| Natural period | |
| U | Fluid velocity |
| Mean velocity | |
| Reduced velocity | |
| L | Characteristic length |
| Kinematic viscosity | |
| CF | Cross-flow |
| CFD | Computational fluid dynamics |
| DDF | Deep draft floater |
| DOF | Degree of freedom |
| FD | Frequency domain |
| FEM | Finite element method |
| FLS | Fatigue limit state |
| FoS | Factor of safety |
| FOWT | Floating offshore wind turbine |
| GPS | Global Positioning System |
| GW | Gigawatt |
| IL | In-line |
| MBL | Mean breaking load |
| MODU | Mobile offshore drilling unit |
| MRU | Motion reference unit |
| MW | Megawatt |
| PSD | Power spectral density |
| ROM | Reduced-order models |
| Semi | Semi-submersibles |
| TD | Time domain |
| TLP | Tension-leg platform |
| ULS | Ultimate limit state |
| VIM | Vortex-induced motions |
| VIV | Vortex-induced vibrations |
References
- IEA. Net Zero by 2050; Technical Report; IEA: Paris, France, 2021. [Google Scholar]
- DNV. Floating Offshore Wind: The Next Five Years; Technical Report; DNV: Baerum, Norway, 2021. [Google Scholar]
- DNV GL. Floating Wind: The Power to Commercialize; Report; DNV GL: Baerum, Norway, 2020. [Google Scholar]
- Zheng, Z.; Chen, J.; Liang, H.; Zhao, Y.; Shao, Y. Hydrodynamic Responses of a 6 MW Spar-Type Floating Offshore Wind Turbine in Regular Waves and Uniform Current. Fluids 2020, 5, 187. [Google Scholar] [CrossRef]
- Wen, B.; Tian, X.; Li, Z.; Peng, Z. Coupling dynamics of floating wind turbines: History, progress and challenges. Adv. Mech. 2022; in press. [Google Scholar]
- Aksnes, V.; Alsos, H.; Bachynski-Polić, E.; Berthelsen, P.A.; Delhaye, V.; Furevik, B.R.; Jostad, H.P.; Kristiansen, T.; Ommani, B. On common research needs for the next generation of floating support structures. In Proceedings of the ASME 2022 41st International Conference on Ocean, Offshore and Arctic Engineering, Hamburg, Germany, 6–10 June 2022. [Google Scholar]
- ABS. Guidance Notes on Global Performance Analysis for Floating Offshore Wind Turbines; Technical Report; ABS: Spring, TX, USA, 2020. [Google Scholar]
- API. API Recommended Practice 2SK, Design and Analysis of Stationkeeping Systems for Floating Structures, 3rd ed.; API: Washington, DC, USA, 2005. [Google Scholar]
- DNV. DNV-OS-C106 Structural Design of Deep Draught Floating Units—LRFD Method; DNV: Baerum, Norway, 2015. [Google Scholar]
- Blevins, R.D. Flow-Induced Vibration, 2nd ed.; Krieger Publishing Company: Kriegerdrive, FL, USA, 1990. [Google Scholar]
- Fujarra, A.L.C.; Rosetti, G.F.; de Wilde, J.; Gonçalves, R.T. State-of-Art on Vortex-Induced Motion: A Comprehensive Survey After More Than One Decade of Experimental Investigation. In Proceedings of the ASME 2012 31st International Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 June 2012; pp. 561–582. [Google Scholar]
- Potts, A.E.; Potts, D.A.; Marcollo, H.; Jayasinghe, K. Strouhal Number for VIV Excitation of Long Slender Structures. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018; Volume 5. [Google Scholar]
- Lienhard, J.H. Synopsis of Lift, Drag, and Vortex Frequency Data for Rigid Circular Cylinders; Technical Report, Bulletin 300; Washington State University: Pullman, WA, USA, 1966. [Google Scholar]
- Potts, D.A.; Marcollo, H.; Jayasinghe, K. Strouhal Number for Vortex-Induced Vibration Excitation of Long Slender Structures. J. Offshore Mech. Arct. Eng. 2022, 144, 041906. [Google Scholar] [CrossRef]
- Sarpkaya, T. Force on a circular cylinder in viscous oscillatory flow at low Keulegan—Carpenter numbers. J. Fluid Mech. 1986, 165, 61–71. [Google Scholar] [CrossRef]
- Kozakiewicz, A.; Sumer, B.; Fredsøe, J.; Hansen, E. Vortex Regimes Around a Freely Vibrating Cylinder In Oscillatory Flow. Int. J. Offshore Polar Eng. 1997, 7, 94. [Google Scholar]
- Yin, D.; Passano, E. Large Floating Wind Turbines Coupled Analysis A3-1: Hywind Scotland—VIM analysis; Technical Report OC2022 F-020; SINTEF Ocean: Trondheim, Norway, 2022. [Google Scholar]
- Ding, Z.J.; Balasubramanian, S.; Lokken, R.T.; Yung, T.W. Lift and damping characteristics of bare and straked cylinders at riser scale Reynolds numbers. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 3–6 May 2004. [Google Scholar]
- Lie, H.; Szwalek, J.L.; Russo, M.; Braaten, H.; Baarholm, R.J. Drilling riser VIV tests with prototype Reynolds numbers. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9 June 2013; Volume 7. [Google Scholar]
- Dahl, J.M.; Hover, F.S.; Triantafyllou, M.S.; Oakley, O.H. Dual resonance in vortex-induced vibrations at subcritical and supercritical Reynolds numbers. J. Fluid Mech. 2010, 643, 395–424. [Google Scholar] [CrossRef] [Green Version]
- Yin, D.; Lie, H.; Baarholm, R.J. Prototype Reynolds number VIV tests on a full-scale rigid riser. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Trondheim, Norway, 25 June 2017; Volume 2. [Google Scholar]
- Yin, D.; Lie, H.; Baarholm, R.J. Prototype Reynolds number VIV tests on a full-scale rigid riser. J. Offshore Mech. Arct. Eng. 2018, 140, 011702. [Google Scholar] [CrossRef]
- Resvanis, T.L.; Vandiver, J.K. Efficient measurement of hydrodynamic coefficients for vibrating cylinders at supercritical Reynolds numbers. J. Fluids Struct. 2022, 108, 103427. [Google Scholar] [CrossRef]
- Dahl, J.M. Vortex-Induced Vibration of a Circular Cylinder with Combined In-line and Cross-flow Motion. Ph.D. Thesis, Center for Ocean Engineering, Department of Mechanical Engineering, MIT, Webb Institute, Glen Cove, NY, USA, 2008. [Google Scholar]
- Raghavan, K.; Bernitsas, M.M. Experimental investigation of Reynolds number effect on vortex induced vibartion of rigid circular cylinder on elastic supports. Ocean. Eng. 2011, 38, 719–731. [Google Scholar] [CrossRef]
- DeepStar. DeepStar—High Reynolds Number Results, VIV Data Repository. 2003. Available online: http://web.mit.edu/towtank/www/vivdr/index.html (accessed on 30 June 2017).
- Allen, D.W.; Henning, D.L. Surface Roughness Effects on Vortex-Induced Vibration of Cylindrical Structures at Critical and Supercritical Reynolds Numbers. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 2001. [Google Scholar]
- Allen, D.; Henning, D. Vortex-induced vibration tests of a flexible smooth cylinder at supercritical Reynolds numbers. In Proceedings of the Seventh International Offshore and Polar Engineering Conference, Honolulu, HI, USA, 25–30 May 1997. [Google Scholar]
- Vandiver, J.K. Drag coefficients of long flexible cylinders. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2 May 1983. [Google Scholar]
- Roddier, D.; Finnigan, T.; Liapis, S. Influence of the Reynolds Number on Spar Vortex Induced Motions (VIM): Multiple Scale Model Test Comparisons. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–6 June 2009; Volume 5, pp. 797–806. [Google Scholar]
- Pearcey, H.H.; Singh, S.; Matten, R.B.; Cash, R.F. Fluid Loading on Roughened Cylindrical Members of Circular Cross-Section; Technical Report NMI R191, OT-O-8411; National Maritime Institute: Feltham, UK, 1985. [Google Scholar]
- Fage, A.; Warsap, J.H. The Effects of Turbulence and Surface Roughness on the Drag of Circular Cylinders; Technical Report; H. M. Stationery Office: London, UK, 1929. [Google Scholar]
- Achenbach, E. Influence of surface roughness on the cross-flow around a circular cylinder. J. Fluid Mech. 1971, 46, 321–335. [Google Scholar] [CrossRef]
- Guven, O.; Farrell, C.; Petal, V.C. Surface roughness effects on the mean flow past circular cylinders. J. Fluid Mech. 1980, 98, 673–701. [Google Scholar] [CrossRef]
- Gudmestad, O.T.; Moe, G. Hydrodynamic Coefficients for Calculation of Hydrodynamic Loads on Offshore Truss Structures. Mar. Struct. 1996, 9, 745–758. [Google Scholar] [CrossRef]
- Yin, D.; Lie, H.; Russo, M.; Grytøyr, G. Drilling riser model tests for software verification. J. Offshore Mech. Arct. Eng. 2018, 140, 011701. [Google Scholar] [CrossRef]
- Okamoto, T.; Yagita, M. The Experimental Investigation on the Flow Past a Circular Cylinder of Finite Length Placed Normal to the Plane Surface in a Uniform Stream. Bull. JSME 1973, 16, 805–814. [Google Scholar] [CrossRef]
- Rooney, D.M.; Rodichok, J.; Dolan, K. Finite Aspect Ratio Effects on Vortex Shedding Behind Two Cylinders at Angles of Incidence. J. Fluids Eng. 1995, 117, 219–226. [Google Scholar] [CrossRef]
- Kawamura, T.; Hiwada, M.; Hibino, T.; Mabuchi, I.; Kumada, M. Flow around a Finite Circular Cylinder on a Flat Plate: Cylinder height greater than turbulent boundary layer thickness. Bull. JSME 1984, 27, 2142–2151. [Google Scholar] [CrossRef] [Green Version]
- Sumner, D.; Heseltine, J.L.; Dansereau, O.J.P. Wake structure of a finite circular cylinder of small aspect ratio. Exp. Fluids 2004, 37, 720–730. [Google Scholar] [CrossRef]
- Sakamoto, H.; Arie, M. Vortex shedding from a rectangular prism and a circular cylinder placed vertically in a turbulent boundary layer. J. Fluid Mech. 1983, 126, 147–165. [Google Scholar] [CrossRef]
- Gonçalves, R.T.; Sakata, K.; Gambarine, D.M.; Cicolin, M.M.; Hirabayashi, S.; Assi, G.R.S. Experimental Study on Vortex-Induced Vibration of Floating Circular Cylinders with Low Aspect Ratio and Different Free-End Corner Shapes. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018; Volume 2. [Google Scholar]
- Salzmann, D.C.; van der Tempel, J. Aerodynamic damping in the design of support structures for offshore wind turbines. In Proceedings of the International Conference & Exhibition Copenhage Offshore Wind, Copenhagen, Denmark, 26–28 October 2005. [Google Scholar]
- Damgaard, M.; Andersen, J.K.F. Natural Frequency And Damping Estimation of an Offshore Wind Turbine Structure. In Proceedings of the Twenty-second International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012. [Google Scholar]
- Koukoura, C.; Natarajan, A.; Vesth, A. Identification of support structure damping of a full scale offshore wind turbine in normal operation. Renew. Energy 2015, 81, 882–895. [Google Scholar] [CrossRef]
- Van Vondelen, M.; Navalkar, S.T.; Iliopoulos, A.; van der Hoek, D.; van Wingerden, J.W. Damping Identification of Offshore Wind Turbines using Operational Modal Analysis: A Review. Wind Energy Sci. 2021; preprint. [Google Scholar] [CrossRef]
- Williamson, C.H.K.; Govardhan, R. Vortex Induced Vibrations. Annu. Rev. Fluid Mech. 2004, 36, 413–455. [Google Scholar] [CrossRef] [Green Version]
- Vandiver, J.K. Damping parameters for flow-induced vibration. J. Fluids Struct. 2012, 35, 105–119. [Google Scholar] [CrossRef]
- Van der Tempel, J. Design of Support Structures for Offshore Wind Turbines. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2006. [Google Scholar]
- Van Dijk, R.; Magee, A.; van Perryman, S.; van Gebara, J. Model Test Experience on Vortex Induced Vibrations of Truss Spars. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 2003. [Google Scholar]
- Govardhan, R.N.; Williamson, C.H.K. Defining the ‘modified Griffin plot’ in vortex-induced vibration: Revealing the effect of Reynolds number using controlled damping. J. Fluid Mech. 2006, 561, 147–180. [Google Scholar] [CrossRef]
- Swithenbank, S.B.; Vandiver, J.K.; Larsen, C.M.; Lie, H. Reynolds number dependence of flexible cylinder VIV response data. In Proceedings of the ASME 2008 27th International Conference on Ocean, Offshore and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; Volume 5, pp. 503–511. [Google Scholar]
- Blevins, R.D.; Coughran, C.S. Experimental Investigation of Vortex-Induced Vibration in One and Two Dimensions With Variable Mass, Damping, and Reynolds Number. J. Fluids Eng. 2009, 131, 101202. [Google Scholar] [CrossRef]
- Moan, T.; Gao, Z.; Bachynski, E.E.; Nejad, A.R. Recent Advances in Integrated Response Analysis of Floating Wind Turbines in a Reliability Perspective. J. Offshore Mech. Arct. Eng. 2020, 142, 052002. [Google Scholar] [CrossRef] [Green Version]
- Khalifeh, M.; Saasen, A. Different Categories of Working Units. In Introduction to Permanent Plug and Abandonment of Wells; Springer International Publishing: Cham, Switzerland, 2020; pp. 137–163. [Google Scholar]
- Kaiser, M.J. Chapter 5—Pipeline Installation and Vessel Specifications. In The Offshore Pipeline Construction Industry; Kaiser, M.J., Ed.; Gulf Professional Publishing: Houston, TX, USA, 2020; pp. 113–140. [Google Scholar]
- Thys, M.; Souza, C.; Sauder, T.; Fonseca, N.; Berthelsen, P.A.; Engebretsen, E.; Haslum, H. Experimental Investigation of the Coupling between Aero- and Hydrodynamical Loads on A 12 MW Semi-Submersible Floating Wind Turbine. In Proceedings of the ASME 2021 40th International Conference on Ocean, Offshore and Arctic Engineering, Online, 21–30 June 2021; Volume 9. [Google Scholar]
- ISO19901-7; Petroleum and Natural Gas Industries—Specific Requirements for Offshore Structures—Part 7: Stationkeeping Systems for Floating Offshore Structures and Mobile Offshore Units. ISO: Geneva, Switzerland, 2013.
- Fujiwara, T. VIM simulation on a cylindrical floating structure. J. Mar. Sci. Technol. 2018, 23, 288–301. [Google Scholar] [CrossRef]
- Mercier, R.S.; Ward, E.G. (Eds.) Spar Vortex-Induced Motions—Proceedings of MMS/OTRC Workshop; Offshore Technology Research Center: Navasota, TX, USA, 2003. [Google Scholar]
- ABSG Consulting Inc. Floating Offshore Wind Turbine Development Assessment—Final Report and Technical Summary; Techreport, Task Order 140M0120F0021; ABSG Consulting Inc.: Arlington, VA, USA, 2021. [Google Scholar]
- DNV. DNV-ST-0119 Floating Wind Turbine Structures; DNV: Baerum, Norway, 2018. [Google Scholar]
- DNV. DNV-RP-C205 Environmental Conditions and Environmental Loads; DNV: Baerum, Norway, 2009. [Google Scholar]
- Passano, E.; Grytøyr, G.; Haslum, H.; Lie, H.; Yin, D. Simulation of VIM of an offshore floating wind turbine. In Proceedings of the ASME 2022 41st International Conference on Ocean, Offshore and Arctic Engineering, Hamburg, Germany, 6–10 June 2022. [Google Scholar]
- Rijken, O.; Leverette, S. Experimental Study Into Vortex Induced Motion Response of Semi Submersibles With Square Columns. In Proceedings of the ASME 2008 27th International Conference on Ocean, Offshore and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; Volume 4, pp. 263–276. [Google Scholar]
- Zou, J.; Poll, P.; Antony, A.; Das, S.; Padmanabhan, R.; Vinayan, V.; Parambath, A. VIM Model Testing and VIM Induced Mooring Fatigue of a Dry Tree Paired-Column Semisubmersible Platform. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 2014. [Google Scholar]
- Rijken, O.; Leverette, S. Field Measurements of Vortex Induced Motions of a Deep Draft Semisubmersible. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–6 June 2009; Volume 6, pp. 739–746. [Google Scholar]
- Yin, D.; Lie, H.; Wu, J. Structural and Hydrodynamic Aspects of Steel Lazy Wave Riser in Deepwater. J. Offshore Mech. Arct. Eng. 2020, 142, 020801. [Google Scholar] [CrossRef]
- Irani, M.; Finn, L. Model Testing for Vortex Induced Motions of Spar Platforms. In Proceedings of the ASME 2004 23rd International Conference on Offshore Mechanics and Arctic Engineering, Vancouver, BC, Canada, 20–25 June 2004; Volume 1, pp. 605–610. [Google Scholar]
- Finnigan, T.; Irani, M.; van Dijk, R. Truss Spar VIM in Waves and Currents. In Proceedings of the ASME 2005 24th International Conference on Ocean, Offshore and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005; Volume 2, pp. 475–482. [Google Scholar]
- Finnigan, T.; Roddier, D. Spar VIM Model Tests at Supercritical Reynolds Numbers. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; Volume 3, pp. 731–740. [Google Scholar]
- Gonçalves, R.T.; Chame, M.E.F.; Silva, L.S.P.; Koop, A.; Hirabayashi, S.; Suzuki, H. Experimental Study on Flow-Induced Motions (FIM) of a Floating Offshore Wind Turbine Semi-Submersible Type (OC4 Phase II Floater). In Proceedings of the ASME 2019 2nd International Offshore Wind Technical Conference, Glasgow, UK, 9 June 2019. [Google Scholar]
- Gonçalves, R.T.; Chame, M.E.F.; Silva, L.S.P.; Koop, A.; Hirabayashi, S.; Suzuki, H. Experimental Flow-Induced Motions of a FOWT Semi-Submersible Type (OC4 Phase II Floater). J. Offshore Mech. Arct. Eng. 2020, 143, 012004. [Google Scholar] [CrossRef]
- Fujarra, A.L.C.; Hirabayashi, S.; Cenci, F.; Gonçalves, R.T. Effect of the initial roll or pitch angles on the vortex-induced motions (VIM) of floating circular cylinders with low aspect ratio. In Proceedings of the Annual Autumn Conference 2019 of the Japan Society of Naval Architects and Ocean Engineers (JASNAOE), Himeji, Japan, 21–22 November 2019. [Google Scholar]
- Fujiwara, T.; Saito, M.; Maeda, K.; Sato, H.; Ishida, K. Experimental Investigation of VIM Characteristics on Column Type Floater in Super Critical Reynolds Number. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9 June 2013; Volume 5. [Google Scholar]
- Fujiwara, T.; Saito, M.; Maeda, K.; Sato, H.; Ishida, K.; Kato, S. Experimental Investigation of VIM Characteristics on Spar Type Floater in Higher Reynolds Number. J. Jpn. Soc. Nav. Archit. Ocean. Eng. 2014, 20, 39–47. [Google Scholar]
- Fujiwara, T. VIM Simulation Method on a Cylindrical Floating Structure. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 18 June 2016; Volume 1. [Google Scholar]
- Gonçalves, R.T.; Rosetti, G.; Fujarra, A.L.C.; Nishimoto, K.; Ferreira, M.D. Relevant Aspects in Vortex-Induced Motions of Spar and Monocolumn Platforms: A Brief Overview. In Proceedings of the COBEM 2009, 20th International Congress of Mechanical Engineering, Gramado, Brazil, 15–20 November 2009. [Google Scholar]
- Gonçalves, R.T.; Rosetti, G.F.; Fujarra, A.L.; Oliveira, A.C. Experimental study on vortex-induced motions of a semi-submersible platform with four square columns, Part II: Effects of surface waves, external damping and draft condition. Ocean. Eng. 2013, 62, 10–24. [Google Scholar] [CrossRef]
- Gonçalves, R.T.; Rosetti, G.F.; Franzini, G.R.; Meneghini, J.R.; Fujarra, A.L.C. Two-degree-of-freedom vortex-induced vibration of circular cylinders with very low aspect ratio and small mass ratio. J. Fluids Struct. 2013, 39, 237–257. [Google Scholar] [CrossRef]
- Gonçalves, R.T.; Meneghini, J.R.; Fujarra, A.L. Vortex-induced vibration of floating circular cylinders with very low aspect ratio. Ocean. Eng. 2018, 154, 234–251. [Google Scholar] [CrossRef]
- Gonçalves, R.T.; da Silva, R.O.P.; Marques, M.A.; Hirabayashi, S.; da Silva Assi, G.R.; Simos, A.N.; Suzuki, H. Experimental Study on Vortex-Induced Motions of Floating Circular Single Cylinders with Low Aspect Ratio and Different Heave Plate Geometries. In Proceedings of the International Ocean and Polar Engineering Conference, Virtual, 12–16 October 2020. [Google Scholar]
- Duan, F.; Hu, Z.; Niedzwecki, J. Model test investigation of a spar floating wind turbine. Mar. Struct. 2016, 49, 76–96. [Google Scholar] [CrossRef] [Green Version]
- Martin, H.R.; Kimball, R.W.; Viselli, A.M.; Goupee, A.J. Methodology for Wind/Wave Basin Testing of Floating Offshore Wind Turbines. ASME. J. Offshore Mech. Arct. Eng. 2014, 136, 020905. [Google Scholar] [CrossRef]
- Carlson, D.W.; Modarres-Sadeghi, Y. Vortex-induced vibration of spar platforms for floating offshore wind turbines. Wind Energy 2018, 21, 1169–1176. [Google Scholar] [CrossRef]
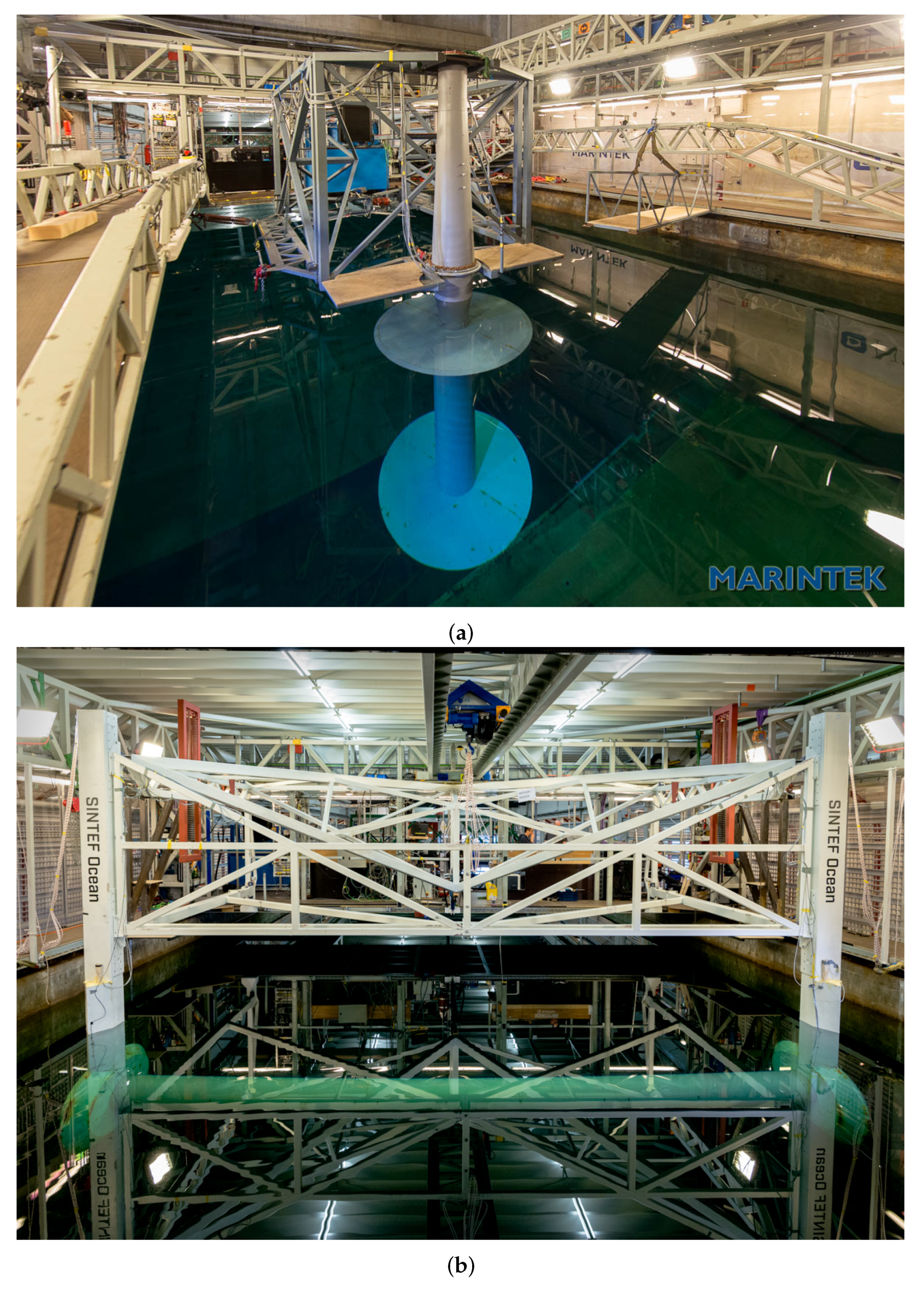
- SINTEF Ocean. Available online: https://www.sintef.no/en/expertise/ocean/design-and-verification-of-offshore-wind-turbines/ (accessed on 1 May 2022).
- Rambech, H.J. Towing Test of Hywind Scotland Floatingwind Turbine—Study of VIM—Calm Water Towing Tests; Technical Report MT2014 F-118; MARINTEK: Trondheim, Norway, 2014. [Google Scholar]
- de Wilde, J.; Sworn, A.; Cook, H.; Willis, N.; Bridge, C. Cross Section VIV Model Test For Novel Riser Geometries. In Proceedings of the Deep Offshore Technology Conference, New Orleans, LA, USA, 30 November–3 December 2004. [Google Scholar]
- Triantafyllou, M.; Triantafyllou, G.; Tein, Y.D.; Ambrose, B.D. Pragmatic riser VIV analysis. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 1999. [Google Scholar]
- Vandiver, J.K.; Li, L. Shear7 v4.5 Program Theoretical Manual; Massachusetts Institute of Technology: Cambridge, MA, USA, 2007. [Google Scholar]
- Passano, E.; Larsen, C.M.; Lie, H.; Wu, J. VIVANA Theory Manual Release 4.6 Rev.0; Technical Report MT2014 F-135; MARINTEK: Trondheim, Norway, 2015. [Google Scholar]
- Passano, E.; Wu, J.; Sævik, S.; Yin, D. Lazy Wave Riser JIP: VIVANA-TD Theory/User Manual; Technical report OC2020 F-061; SINTEF Ocean: Trondheim, Norway, 2020. [Google Scholar]
- Waals, O.J.; Phadke, A.C.; Bultema, S. Flow Induced Motions on Multi Column Floaters. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; Volume 1, pp. 669–678. [Google Scholar]
- Rijken, O.; Leverette, S.; Davies, K. Semi Submersible with Four Square Columns. In Proceedings of the Deep Offshore Technology Conference, New Orleans, LA, USA, 30 November–3 December 2004. [Google Scholar]
- Gonçalves, R.T.; Rosetti, G.F.; Fujarra, A.L.; Oliveira, A.C. Experimental study on vortex-induced motions of a semi-submersible platform with four square columns, Part I: Effects of current incidence angle and hull appendages. Ocean Eng. 2012, 54, 150–169. [Google Scholar] [CrossRef]
- Fujarra, A.L.C.; Gonçalves, R.T.; Rosetti, G.F.; da Silva Jr, H.C.; Koop, A. Roughness Effects on the VIM Response of Deep-Draft Semi-Submersible Platforms. In Proceedings of the Twenty-Fifth (2015) International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–216 June 2015; pp. 1035–1041. [Google Scholar]
- Liu, M.; Xiao, L.; Yang, J.; Tian, X. Parametric study on the vortex-induced motions of semi-submersibles: Effect of rounded ratios of the column and pontoon. Phys. Fluids 2017, 29, 055101. [Google Scholar] [CrossRef]
- Liu, M.; Xiao, L.; Lu, H.; Xiao, X. Experimental study on vortex-induced motions of a semi-submersible with square columns and pontoons at different draft conditions and current incidences. Int. J. Nav. Archit. Ocean. Eng. 2017, 9, 326–338. [Google Scholar] [CrossRef]
- Maximiano, A.; Koop, A.; de Wilde, J.; Gonçalves, R.T. Experimental Study on the Vortex-Induced Motions (VIM) of a Semi-Submersible Floater in Waves. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Trondheim, Norway, 25 June 2017; Volume 7. [Google Scholar]
- Gonçalves, R.T.; Malta, E.B.; Simos, A.N. Experimental study of the effect of heave plate dimensions on the flow-induced motions (FIM) of a multi-column floating offshore wind turbine (FOWT). In Proceedings of the ASME 2022 41st International Conference on Ocean, Offshore and Arctic Engineering, Hamburg, Germany, 6–10 June 2022. [Google Scholar]
- SINTEF Ocean. SIMA User Guide; SINTEF Ocean: Trondheim, Norway, 2021. [Google Scholar]
- Sauder, T.; Chabaud, V.; Thys, M.; Bachynski, E.E.; Sæther, L.O. Real-Time Hybrid Model Testing of a Braceless Semi-Submersible Wind Turbine: Part I—The Hybrid Approach. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 18 June 2016; Volume 6. [Google Scholar]
- Bachynski, E.E.; Thys, M.; Sauder, T.; Chabaud, V.; Sæther, L.O. Real-Time Hybrid Model Testing of a Braceless Semi-Submersible Wind Turbine: Part II — Experimental Results. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 18 June 2016; Volume 6. [Google Scholar]
- Berthelsen, P.A.; Bachynski, E.E.; Karimirad, M.; Thys, M. Real-Time Hybrid Model Tests of a Braceless Semi-Submersible Wind Turbine: Part III —Calibration of a Numerical Model. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 18 June 2016; Volume 6. [Google Scholar]
- Li, Y.; Liu, L.; Zhu, Q.; Guo, Y.; Hu, Z.; Tang, Y. Influence of Vortex-Induced Loads on the Motion of SPAR-Type Wind Turbine: A Coupled Aero-Hydro-Vortex-Mooring Investigation. J. Offshore Mech. Arct. Eng. 2018, 140, 051903. [Google Scholar] [CrossRef] [Green Version]
- Hegseth, J.M.; Bachynski, E.E. A semi-analytical frequency domain model for efficient design evaluation of spar floating wind turbines. Mar. Struct. 2019, 64, 186–210. [Google Scholar] [CrossRef]
- Hegseth, J.M.; Bachynski, E.E.; Martins, J.R. Integrated design optimization of spar floating wind turbines. Mar. Struct. 2020, 72, 102771. [Google Scholar] [CrossRef]
- Walker, J.; Coraddu, A.; Collu, M.; Oneto, L. Digital twins of the mooring line tension for floating offshore wind turbines to improve monitoring, lifespan, and safety. J. Ocean. Eng. Mar. Energy 2022, 8, 1–16. [Google Scholar] [CrossRef]
- Yang, R.Y.; Chuang, T.C.; Zhao, C.; Johanning, L. Dynamic Response of an Offshore Floating Wind Turbine at Accidental Limit States—Mooring Failure Event. Appl. Sci. 2022, 12, 1525. [Google Scholar] [CrossRef]
- Liang, G.; Merz, K.; Jiang, Z. Modeling of a Shared Mooring System for a Dual-Spar Configuration. In Proceedings of the ASME 2020 39th International Conference on Ocean, Offshore and Arctic Engineering, Online, 3 August 2020; Volume 9. [Google Scholar]
- SINTEF Ocean. RIFLEX Theory Manual; SINTEF Ocean: Trondheim, Norway, 2021. [Google Scholar]
- Thiagarajan, K.P.; Constantinides, Y.; Finn, L. CFD Analysis of Vortex-Induced Motions of Bare and Straked Cylinders in Currents. In Proceedings of the ASME 2005 24th International Conference on Ocean, Offshore and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005; Volume 3, pp. 903–908. [Google Scholar]
- Oakley, O.H., Jr.; Constantinides, Y.; Navarro, C.; Holmes, S. Modeling Vortex Induced Motions of Spars in Uniform and Stratified Flows. In Proceedings of the ASME 2005 24th International Conference on Ocean, Offshore and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005. [Google Scholar]
- Halkyard, J.; Sirnivas, S.; Holmes, S.; Constantinides, Y.; Oakley, O.H., Jr.; Thiagarajan, K. Benchmarking of Truss Spar Vortex Induced Motions Derived From CFD With Experiments. In Proceedings of the ASME 2005 24th International Conference on Ocean, Offshore and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005; Volume 3, pp. 895–902. [Google Scholar]
- Oakley, O.H., Jr.; Constantinides, Y. CFD Truss Spar Hull Benchmarking Study. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; Volume 3, pp. 703–713. [Google Scholar]
- Holmes, S. Predicting Spar VIM Using CFD. In Proceedings of the ASME 2008 27th International Conference on Ocean, Offshore and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; Volume 5, pp. 895–900. [Google Scholar]
- Lefevre, C.; Constantinides, Y.; Kim, J.W.; Henneke, M.; Gordon, R.; Jang, H.; Wu, G. Guidelines for CFD Simulations of Spar VIM. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9 June 2013; Volume 7. [Google Scholar]
- Vinayan, V.; Antony, A.; Halkyard, J.; Kim, S.J.; Holmes, S.; Spernjak, D. Vortex-Induced Motion of Deep-Draft Semisubmersibles: A CFD-Based Parametric Study. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St John’s, NL, Canada, 31 May 2015; Volume 2. [Google Scholar]
- Kim, S.J.; Spernjak, D.; Holmes, S.; Vinayan, V.; Antony, A. Vortex-Induced Motion of Floating Structures: CFD Sensitivity Considerations of Turbulence Model and Mesh Refinement. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St John’s, NL, Canada, 31 May 2015; Volume 2. [Google Scholar]
- Kara, M.C.; Kaufmann, J.; Gordon, R.; Sharma, P.P.; Lu, J.Y. Application of CFD for Computing VIM of Floating Structures. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 2016. [Google Scholar]
- Kim, S.J.; Spernjak, D.; Mejia-Alvarez, R.; Vinayan, V.; Sterenborg, J.; Antony, A.; Holmes, S.; Halkyard, J. Numerical simulation of vortex-induced motion of a deep-draft paired-column semi-submersible offshore platform. Ocean. Eng. 2018, 149, 291–304. [Google Scholar] [CrossRef]
- Jang, H.; Agrawal, M.; Lee, D.; Xu, W.; Huang, J.; Jiang, F.; Wu, J.; Croonenborghs, E. A Joint-Industry Effort to Develop and Verify CFD Modeling Practice for Predicting Hydrodynamic Coefficients on Bare Riser Surfaces. In Proceedings of the ASME 2021 40th International Conference on Ocean, Offshore and Arctic Engineering, Online, 21–30 June 2021; Volume 1. [Google Scholar]
- Jang, H.; Kim, D.H.; Agrawal, M.; Loubeyre, S.; Lee, D.; Huang, J.; Law, Y.Z.; Magee, A.; Koop, A. A Joint-Industry Effort to Develop and Verify CFD Modeling Practice for Vortex-Induced Motion of a Deep-Draft Semi-Submersible. In Proceedings of the ASME 2021 40th International Conference on Ocean, Offshore and Arctic Engineering, Online, 21–30 June 2021; Volume 1. [Google Scholar]
- Jang, H.; Agrawal, M.; Huang, J.; Jiang, F.; Wu, J.; Lie, H.; Croonenborghs, E. A Joint-Industry Effort to Develop and Verify CFD Modeling Practice for Predicting Hydrodynamic Coefficients of Risers: Staggered Buoyancy Module and Straked Riser. In Proceedings of the ASME 2022 40th International Conference on Ocean, Offshore and Arctic Engineering, Online, 21–30 June 2022. [Google Scholar]
- Li, X.; Xiao, Q.; Gonçalves, R.T.; Peyrard, C. A coupled wave-current-structure study for a floating offshore wind turbine platform. In Proceedings of the ASME 2022 41st International Conference on Ocean, Offshore and Arctic Engineering, Hamburg, Germany, 6–10 June 2022. [Google Scholar]
- Skaare, B.; Nielsen, F.G.; Hanson, T.D.; Yttervik, R.; Havmøller, O.; Rekdal, A. Analysis of measurements and simulations from the Hywind Demo floating wind turbine. Wind Energy 2015, 18, 1105–1122. [Google Scholar] [CrossRef]
- Driscoll, F.; Jonkman, J.; Robertson, A.; Sirnivas, S.; Skaare, B.; Nielsen, F.G. Validation of a FAST Model of the Statoil-hywind Demo Floating Wind Turbine. Energy Procedia 2016, 94, 3–19. [Google Scholar] [CrossRef] [Green Version]
- Jacobsen, A.; Godvik, M. Influence of wakes and atmospheric stability on the floater responses of the Hywind Scotland wind turbines. Wind Energy 2021, 24, 149–161. [Google Scholar] [CrossRef]
- Govardhan, R.; Williamson, C. Vortex-induced motions of a tethered sphere. J. Wind. Eng. Ind. Aerodyn. 1997, 69–71, 375–385. [Google Scholar] [CrossRef]
- Pesce, C.P.; Amaral, G.A.; Mendes, B.; Oliveira, E.L.; Franzini, G.R. A Model to Assess the Susceptibility of a Multicolumn FOWT Platform to Vortex-Induced Motions in Early Design Stages. In Proceedings of the ASME 2021 40th International Conference on Ocean, Offshore and Arctic Engineering, Online, 21–30 June 2021; Volume 9. [Google Scholar]
- Martins, F.; Avila, J. Three-dimensional CFD analysis of damping effects on vortex-induced vibrations of 2DOF elastically-mounted circular cylinders. Mar. Struct. 2019, 65, 12–31. [Google Scholar] [CrossRef]
- Christensen, A.Y. Analysis of Vortex Induced Motions for Floating Wind Turbines. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2019. [Google Scholar]
- Han, P.; Pan, G.; Tian, W. Numerical simulation of flow-induced motion of three rigidly coupled cylinders in equilateral-triangle arrangement. Phys. Fluids 2018, 30, 125107. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CF motion | IL motion | |
|---|---|---|
| Long cylinder | ||
| <1.0 | no VIV | no VIV |
| 1.0–2.5 | ||
| 2.0–4.0 | ||
| 4.0–5.0 | ||
| 5.0–12.5 | , | |
| >12.5 | no VIV | no VIV |
| Short cylinder | ||
| 2.5–4.0 | ||
| 4.0–5.0 | ||
| 5.0–7.0 | ||
| >7.0 | ||
| Motion | Frequency/Period | Spar | Semi-Submersible | TLP |
|---|---|---|---|---|
| Surge/sway | [Hz] | 0.005–0.025 | 0.008–025 | 0.015–0.05 |
| [s] | 40–185 | 40–120 | 20–60 | |
| Heave | [Hz] | 0.02–0.05 | 0.025–0.07 | 0.2–2 |
| [s] | 20–50 | 15–40 | 0.5–5.0 | |
| Pitch/roll | [Hz] | 0.02–0.04 | 0.02–0.04 | 0.2–1.0 |
| [s] | 25–50 | 25–50 | 1.0–5.0 | |
| Yaw | [Hz] | 0.025–0.2 | 0.0125–0.02 | 0.03–0.2 |
| [s] | 5–40 | 50–80 | 5–30 |
| Sensor | Measurement | Reference |
|---|---|---|
| Wave rider buoy | Waves and currents | [126,127] |
| Sonic anemometer | Wind speed | [126,127,128] |
| Wave radars | Air-gap/Wave elevations | [126,127] |
| Acoustic current profiler | Average current profiles | [127] |
| Global Positioning System (GPS) | Motion of floaters | [67] |
| Motion reference unit (mruu) | 6 DOF motions of spar | [126,128] |
| Strain gauge | Bending moment of tower and substructure | [126] |
| Force sensor | Mooring line tension | [126] |
| Wind turbine control | Turbine rotational speed | [126,127] |
| Wind turbine control | Blade pitch angle | [126,127] |
| Blade-root strains in the flap and edge directions | [127] | |
| Low-speed shaft torque | [127] |
| Objective | Reference | Method | Scale | L [m] | D [m] | |
|---|---|---|---|---|---|---|
| FOWT spar | [85] | Experiment | 1:470 | 0.254 | 0.02 | |
| Spar | [75] | Experiment | - | 5.0 | 1.5 | |
| Spar | [75] | Experiment | - | 1.0 | 0.3 | |
| Spar (straked) | [30] | Experiment | 1:22.3 | 2.95 | 1.75 | |
| Spar (straked) | [30] | Experiment | 1:65 | 1.01 | 0.6 | |
| Spar (straked) | [30] | Experiment | 1:142.8 | 0.46 | 0.27 | |
| Truss spar (straked) | [71] | Experiment | 1:22.3 | 2.95 | 1.75 | |
| Truss spar | [70] | Experiment | 1:40 | 3.85 | 1.4 | |
| Truss spar (straked) | [69] | Experiment | 1:47 | NA | NA | NA |
| Mono-column | [77] | Experiment | - | 1.0 | 1.0 | |
| Mono-column | [77] | Experiment | - | 0.536 | 0.8 | |
| FOWT semi | [72] | Experiment | 1:73 | 0.44 | 0.98 | |
| Semi | [99] | Experiment | 1:56.5 | NA | NA | – |
| Semi | [96] | Experiment | 1:100 | NA | NA | – |
| Semi | [66] | Experiment | 1:54 | NA | NA | NA |
| Circular cylinder | [23] | Experiment | - | 6.233 | 0.325 | – |
| Circular cylinder | [21,22] | Experiment | 1:1 | 3.27 | 0.533 | – |
| Circular cylinder | [19] | Experiment | 1:1 | 3.26 | 0.533 | – |
| Circular cylinder | [80] | Experiment | - | 0.29 | 0.125 | |
| Tethered sphere | [129] | Experiment | ||||
| Semi-FOWT | [130] | CFD-ROM | 1:73 | 0.44 | 0.98 | |
| Circular cylinder | [131] | CFD | - | D | – | |
| Spar-FOWT | [132] | CFD-OpenFOAM | NA | NA | NA | |
| Semi-FOWT | [132] | CFD-OpenFOAM | NA | NA | NA | |
| Semi | [121] | CFD-DDES-SST 2D | 1:54 | 0.987* | 0.359 | |
| Triple cylinder | [133] | CFD-RANS 2D | - | - | - | – |
| Semi | [118] | CFD | 1:54 | - | - | 23,500, 47,000 |
| Semi | [119] | CFD-DDES/URANS | 1:54 | - | - | |
| Truss spar | [114] | CFD-DES | - | 1.4/3.8(truss) | 0.741 | – |
| Semi | [125] | CFD-OpenFoam | 1:73 | 0.44 | 0.98 | |
| Spar-FOWT | [64] | FEM, FD&TD | 1:1 | 76 * | 14.4 | |
| Spar/Mono-column | [59,77] | Wake oscillator | - | 0.536, 1.0, 5.0 | 0.8, 1.0, 0.3, 1.5 | – |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, D.; Passano, E.; Jiang, F.; Lie, H.; Wu, J.; Ye, N.; Sævik, S.; Leira, B.J. State-of-the-Art Review of Vortex-Induced Motions of Floating Offshore Wind Turbine Structures. J. Mar. Sci. Eng. 2022, 10, 1021. https://doi.org/10.3390/jmse10081021
Yin D, Passano E, Jiang F, Lie H, Wu J, Ye N, Sævik S, Leira BJ. State-of-the-Art Review of Vortex-Induced Motions of Floating Offshore Wind Turbine Structures. Journal of Marine Science and Engineering. 2022; 10(8):1021. https://doi.org/10.3390/jmse10081021
Chicago/Turabian StyleYin, Decao, Elizabeth Passano, Fengjian Jiang, Halvor Lie, Jie Wu, Naiquan Ye, Svein Sævik, and Bernt J. Leira. 2022. "State-of-the-Art Review of Vortex-Induced Motions of Floating Offshore Wind Turbine Structures" Journal of Marine Science and Engineering 10, no. 8: 1021. https://doi.org/10.3390/jmse10081021
APA StyleYin, D., Passano, E., Jiang, F., Lie, H., Wu, J., Ye, N., Sævik, S., & Leira, B. J. (2022). State-of-the-Art Review of Vortex-Induced Motions of Floating Offshore Wind Turbine Structures. Journal of Marine Science and Engineering, 10(8), 1021. https://doi.org/10.3390/jmse10081021