
Mitigation of Hub Vortex Cavitation with Application of Roughness



Abstract
:1. Introduction
2. Theoretical Background
2.1. Hydrodynamic Model
2.2. Roughness Model
3. Test Case Set-Up and Numerical Modelling
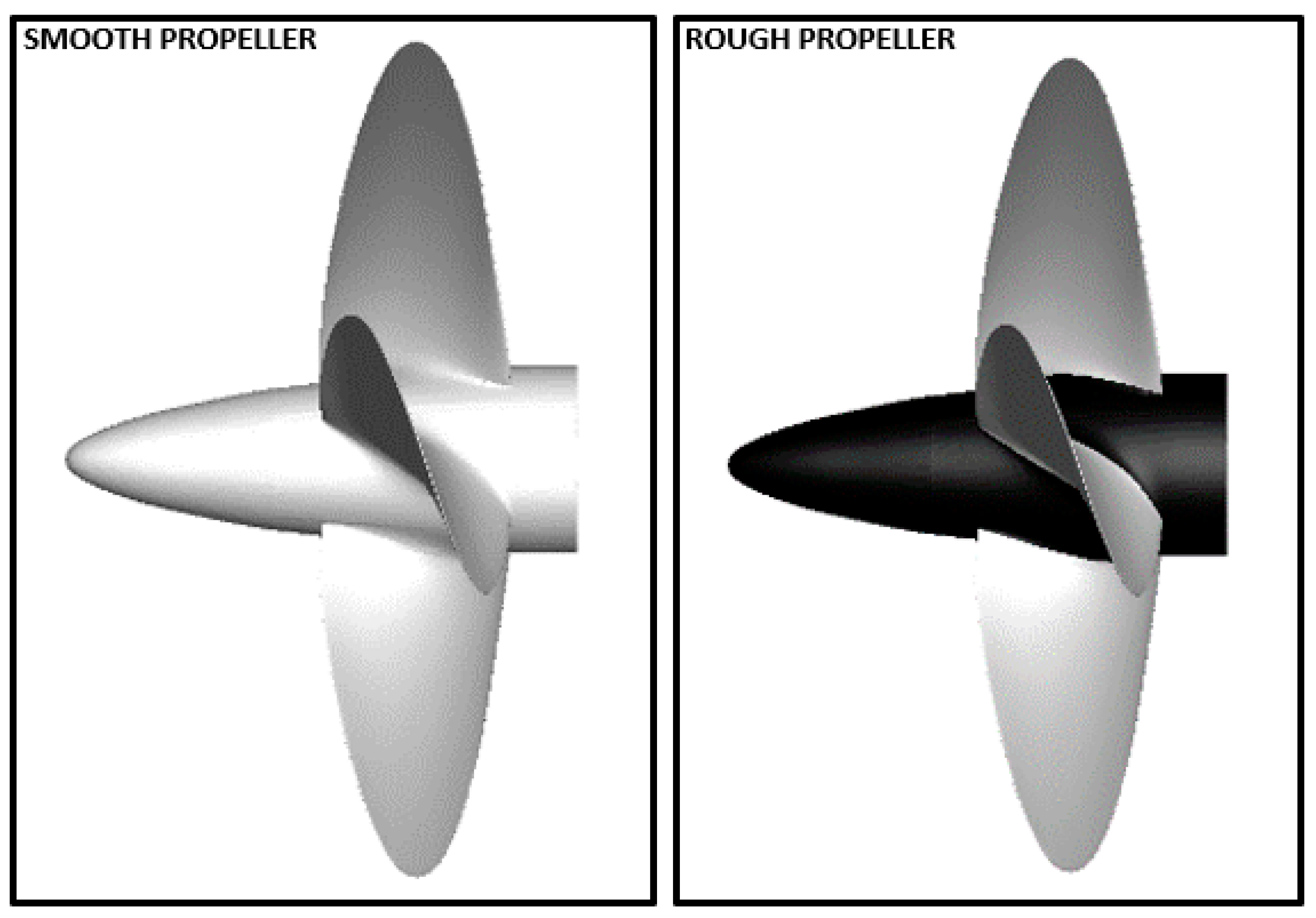
3.1. Geometry and Test Matrix
3.2. Numerical Modelling
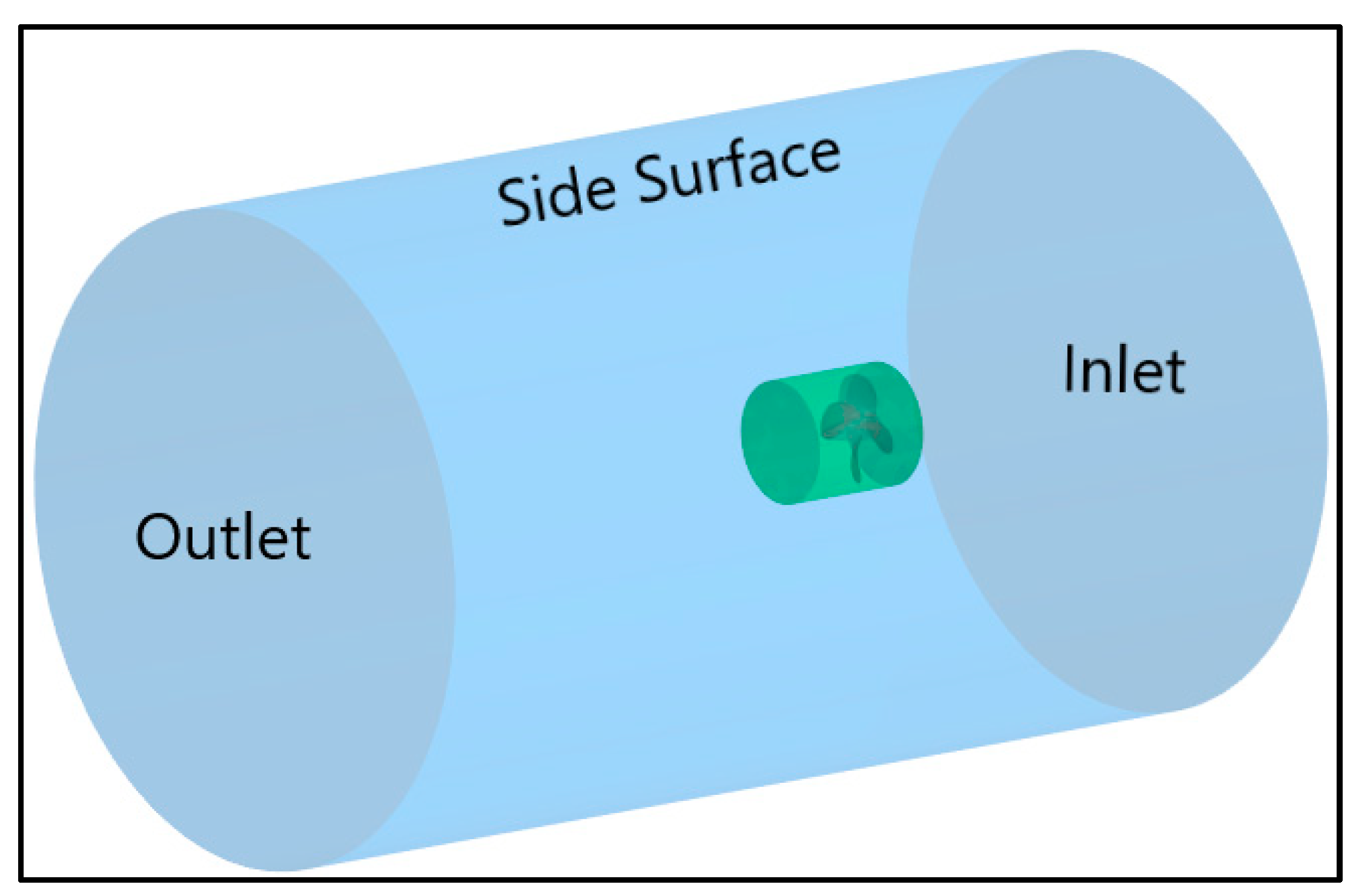
3.2.1. Computational Domain and Boundary Conditions
3.2.2. Grid Generation
3.2.3. Analysis Properties
4. Results
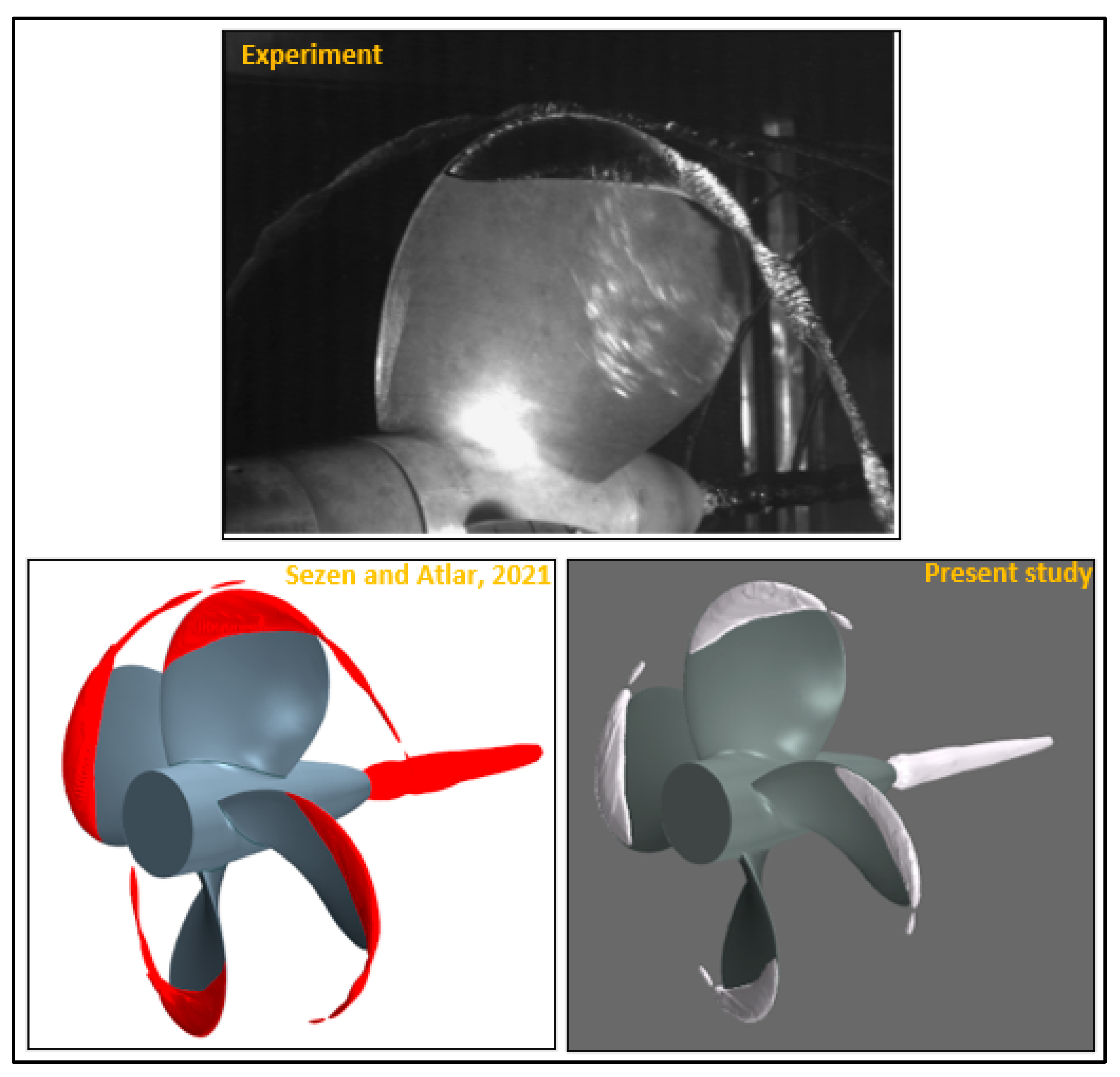
4.1. Validation of the Numerical Results in Smooth Condition
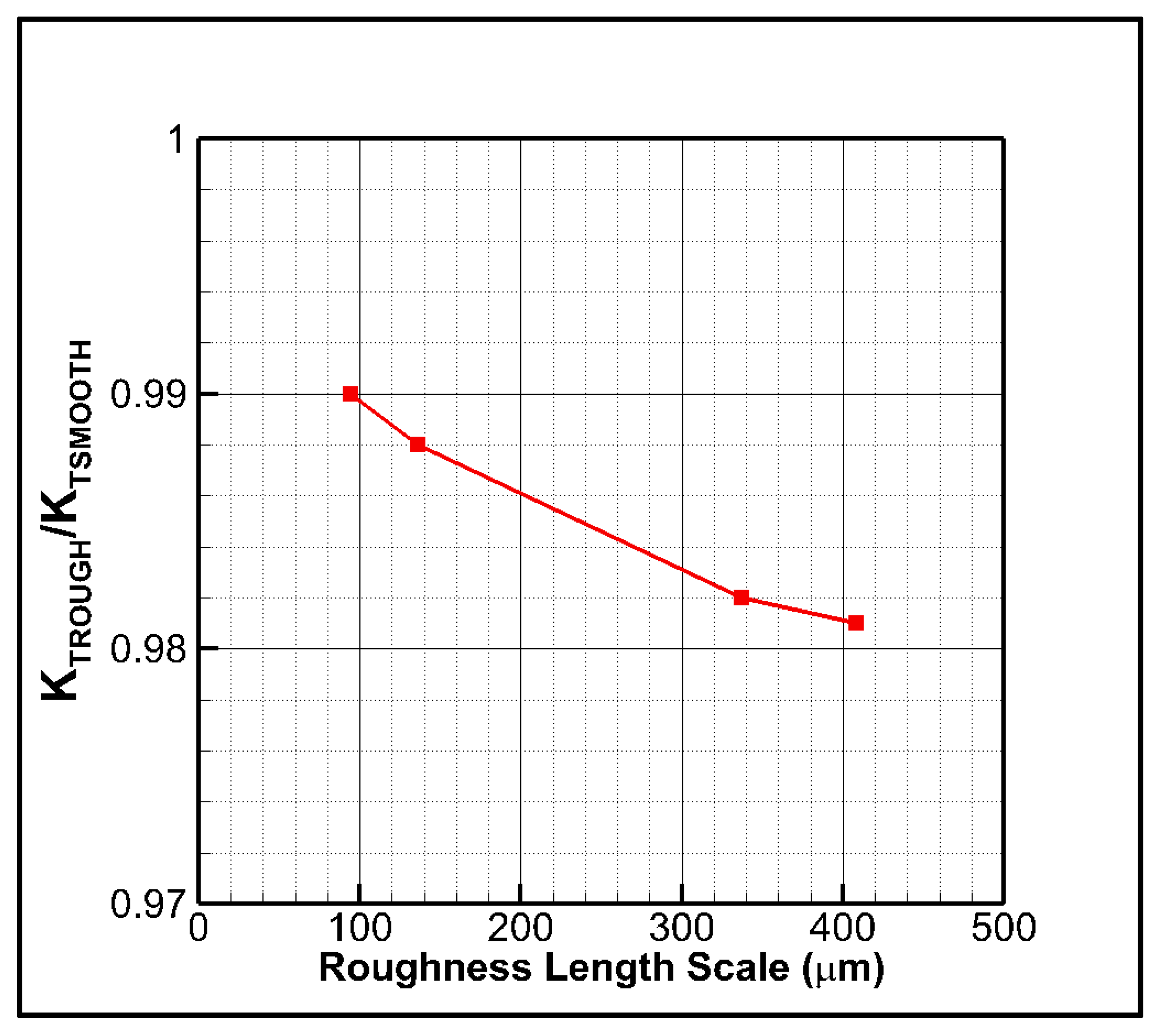
4.2. Influence of Roughness on Propeller Hydrodynamic Performance and Cavitation Extension
5. Conclusions
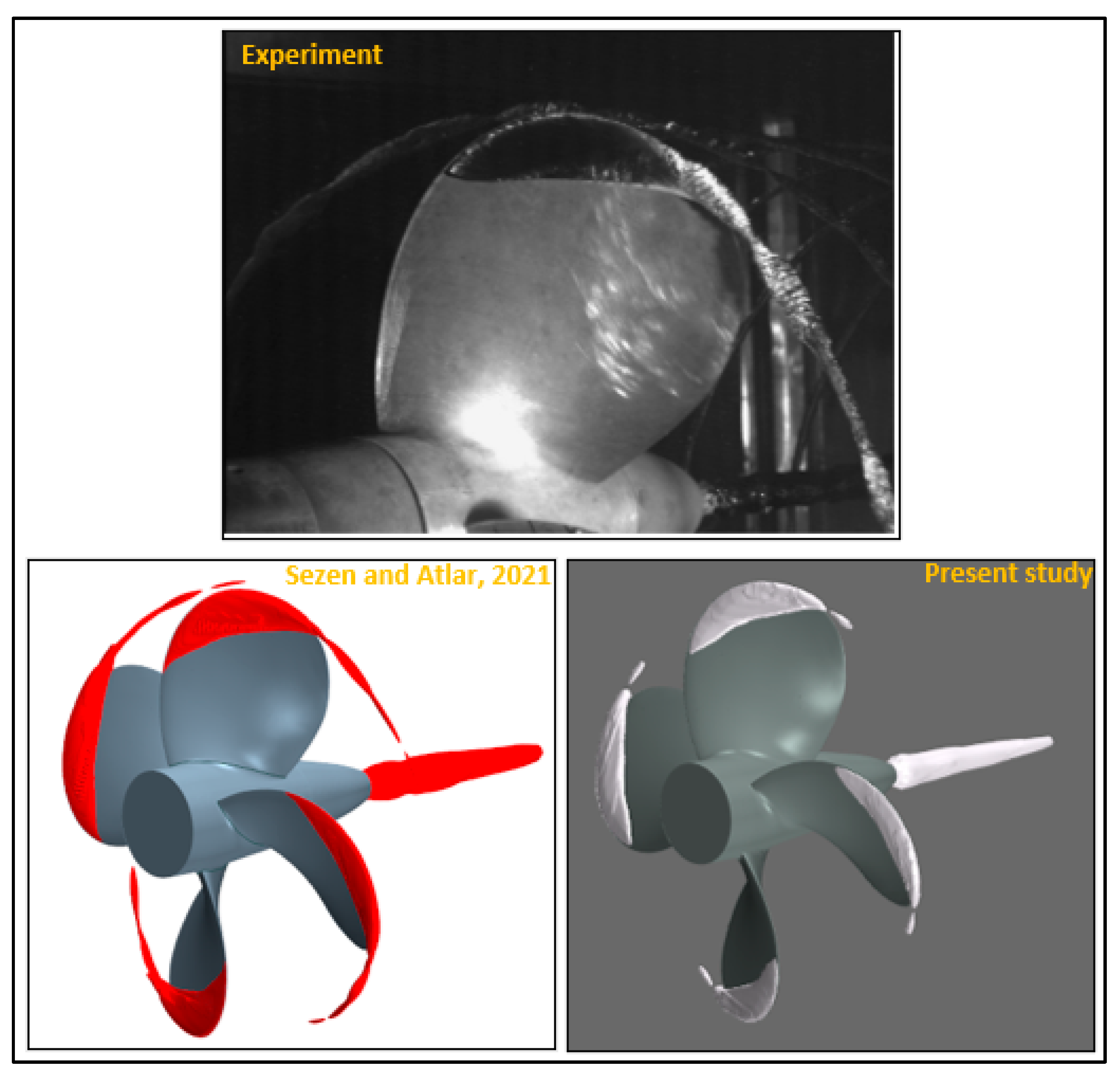
- The propeller’s hydrodynamic characteristics (i.e., thrust and torque coefficients) and cavitation extensions showed good agreement with the experimental data and cavitation observations, with slight differences.
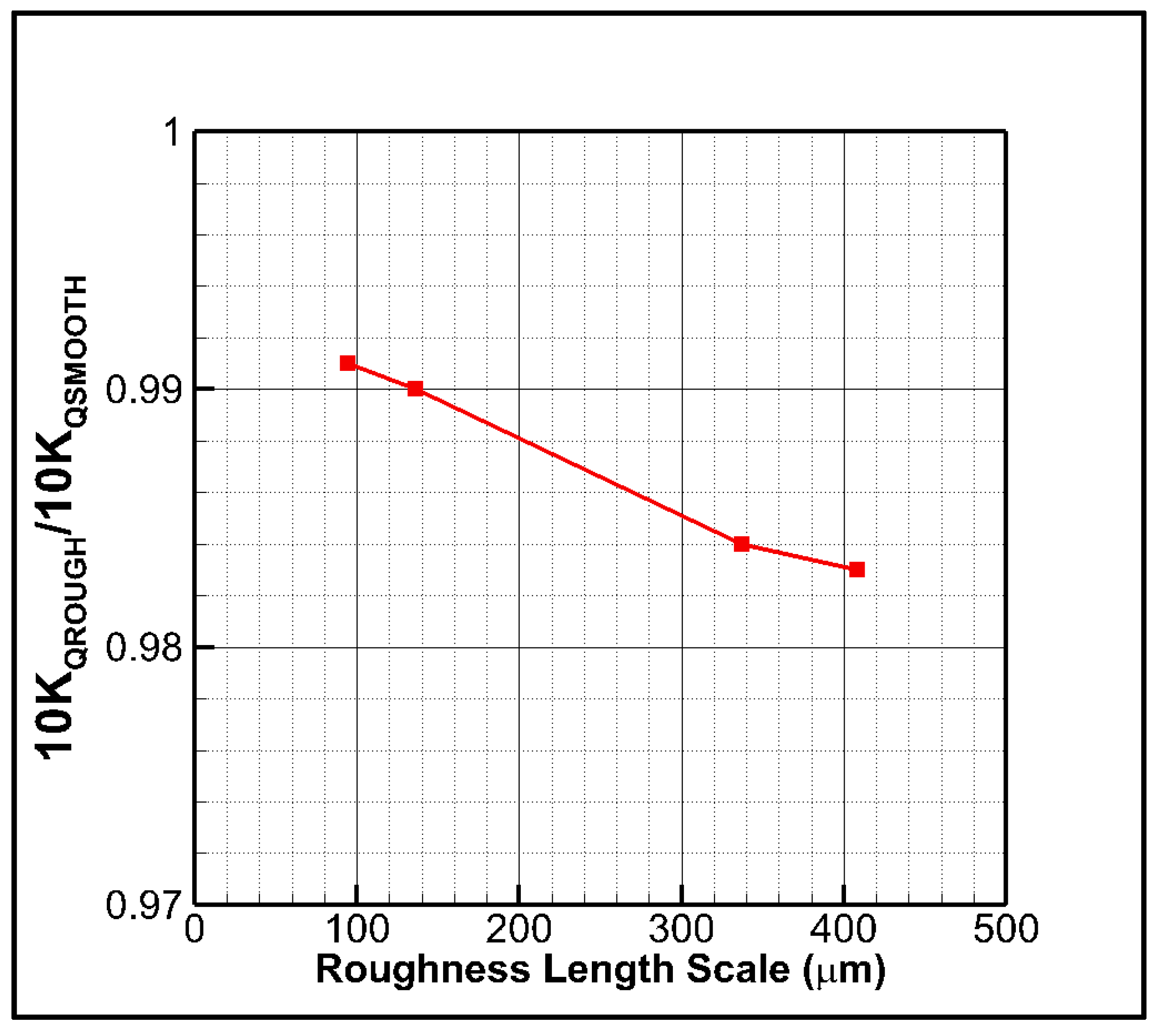
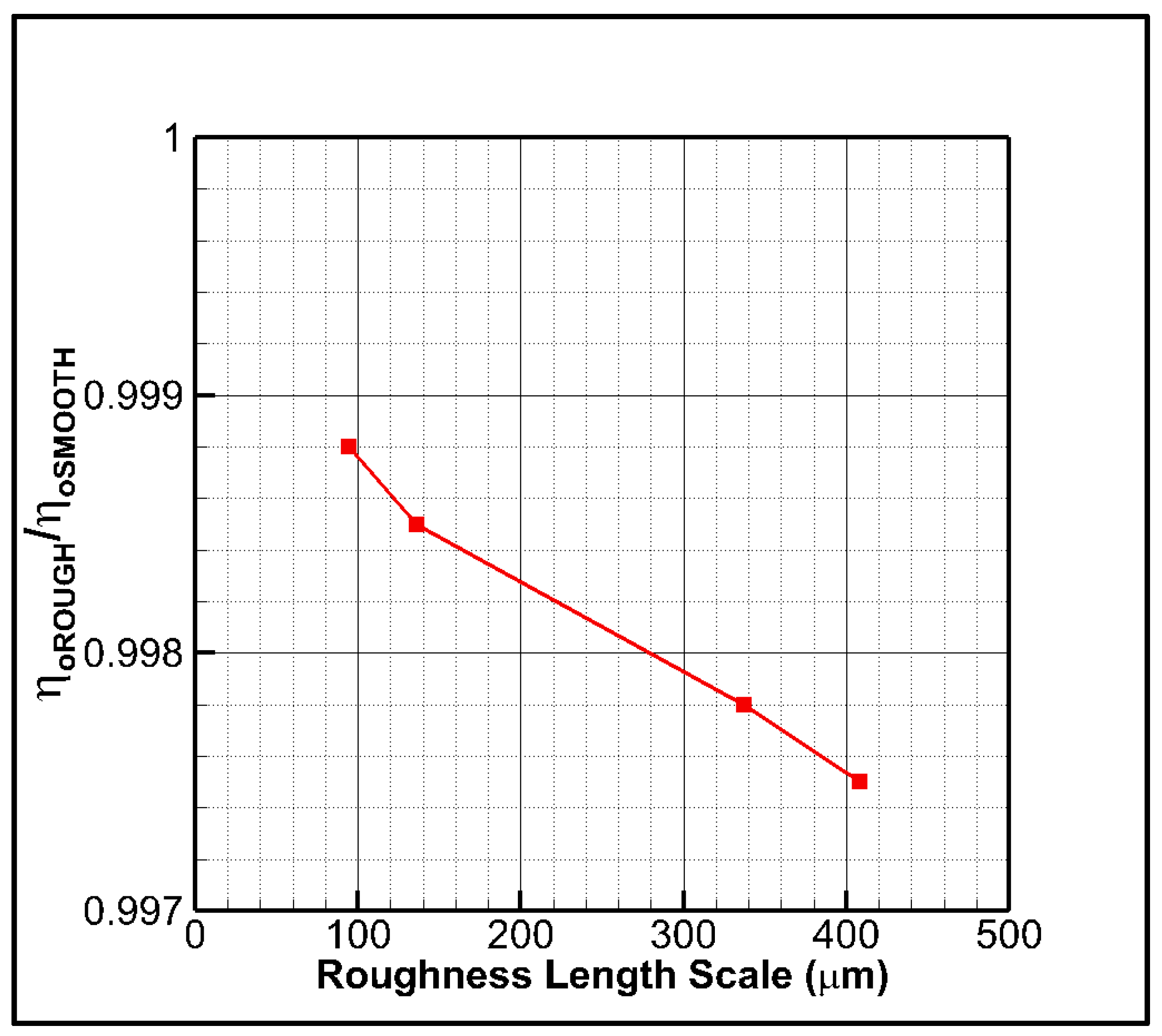
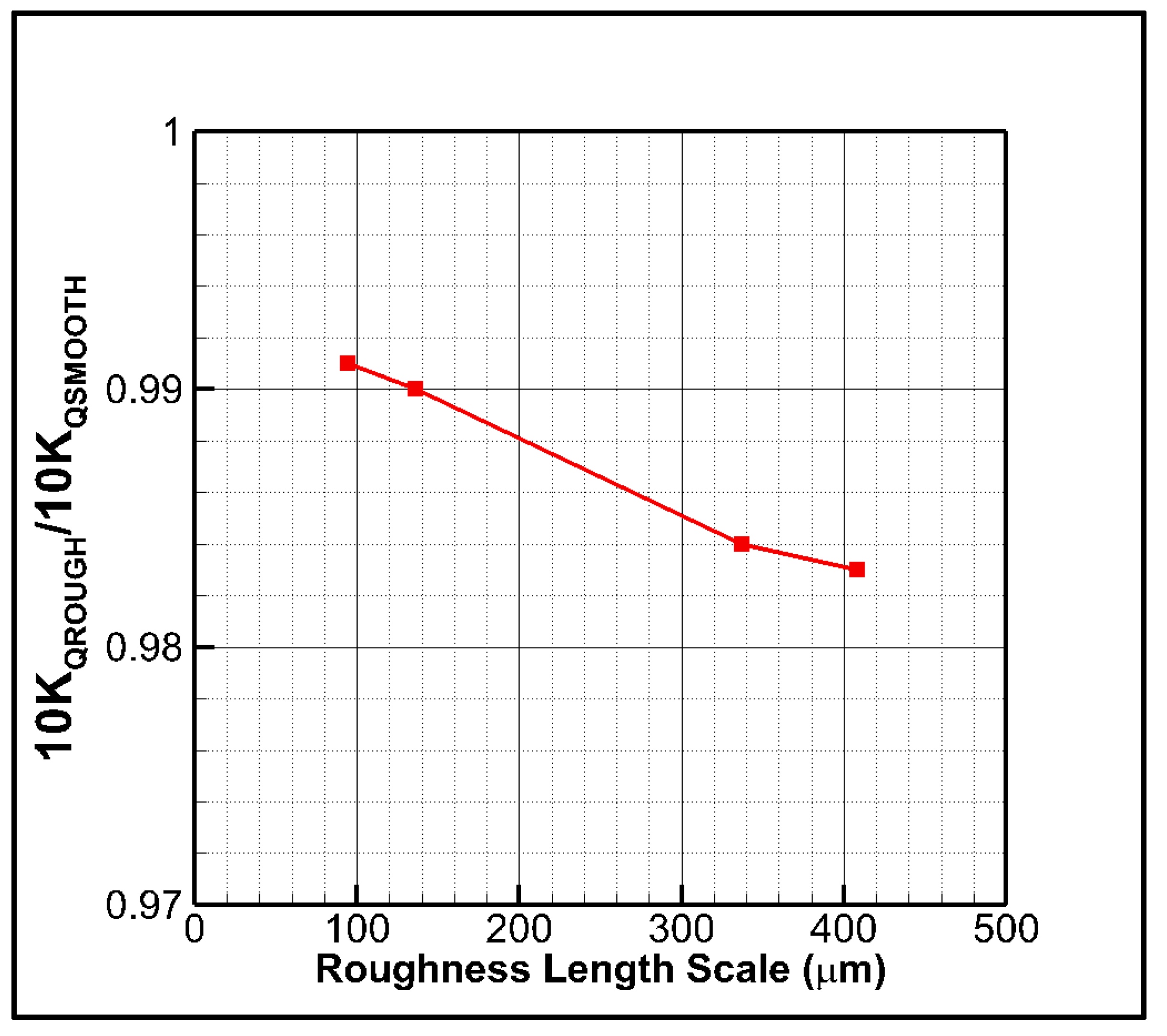
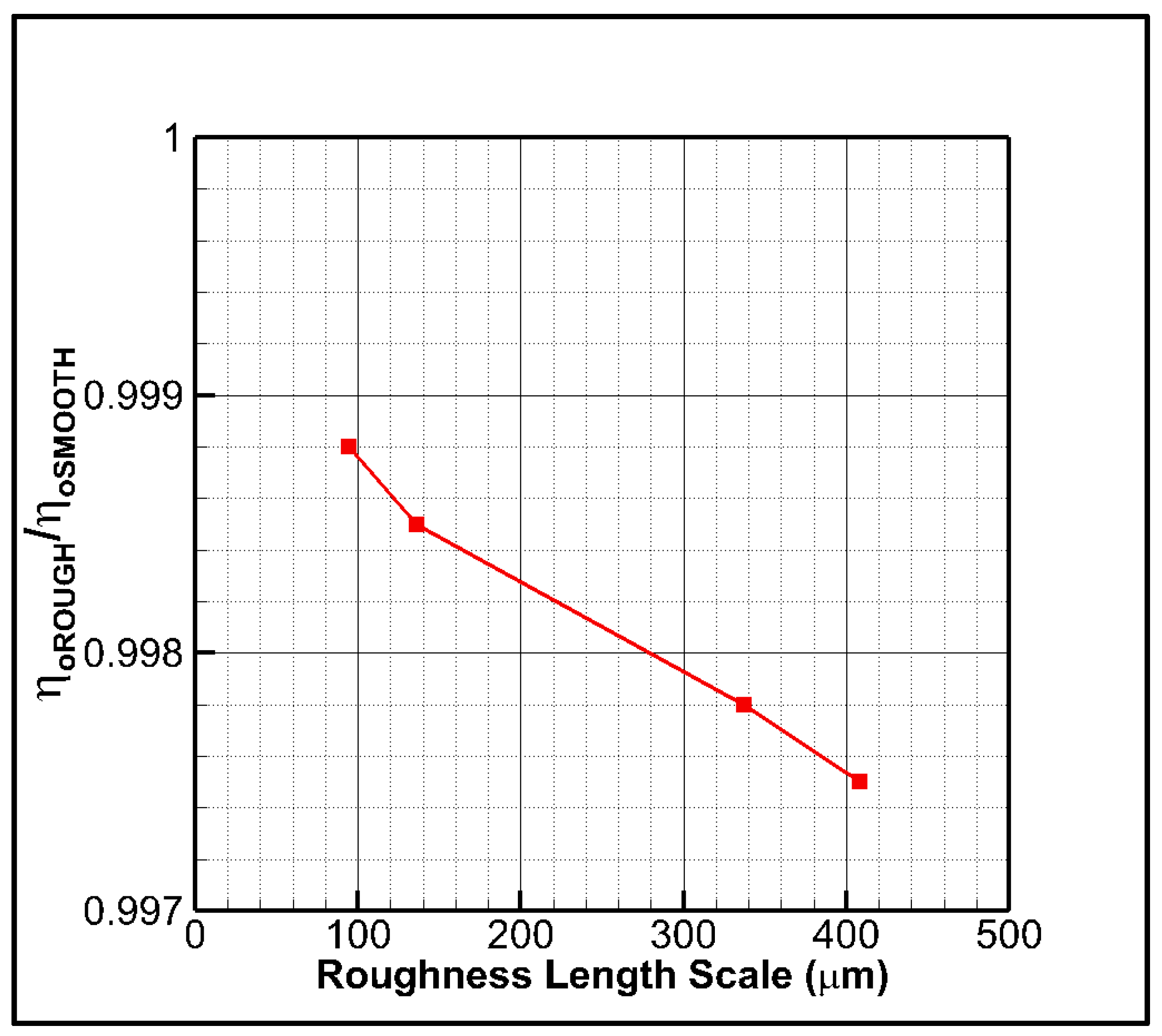
- Similar to the roughness application on the blades explored in our previous studies [15,16], the roughness on the propeller hub caused efficiency loss. However, the unfavourable impact of roughness applied on the hub was less than that of applying homogenously and heterogeneously distributed roughness to the blades. The maximum efficiency loss was found at 0.25% with respect to the smooth condition in the presence of roughness on the propeller hub.
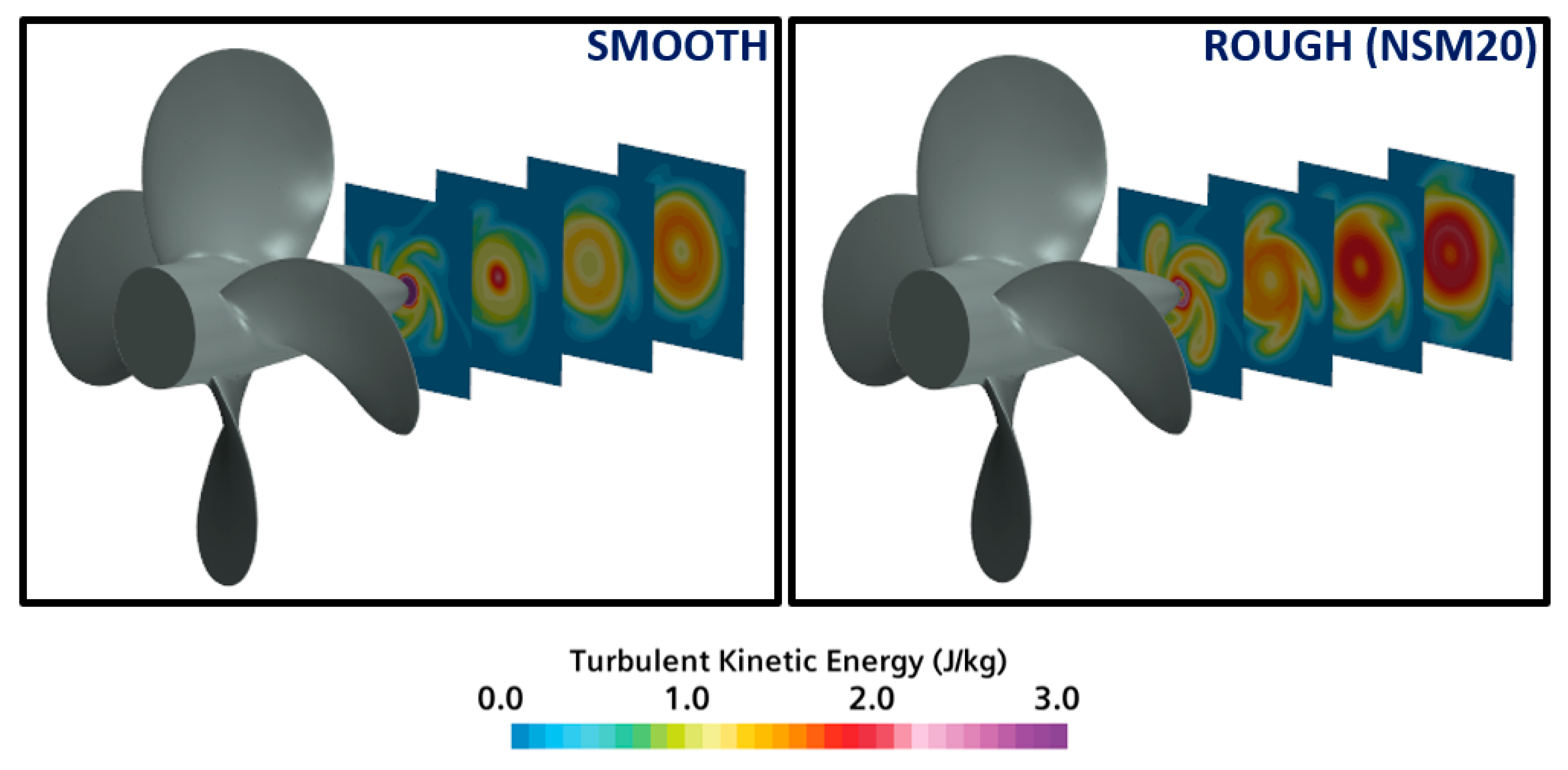
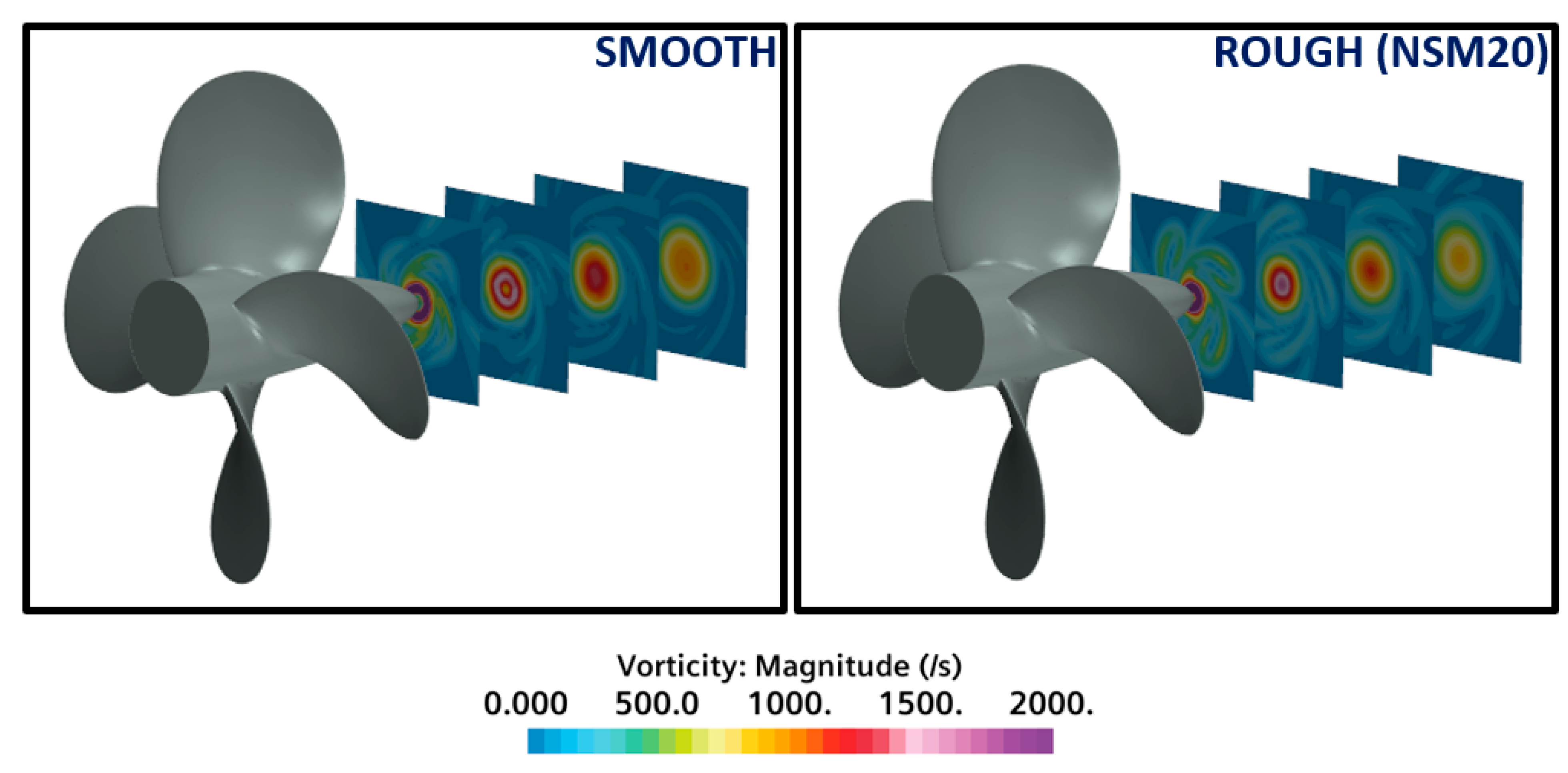
- The roughness increased the turbulence kinetic energy considerably, whereas the hub vortex strength was reduced significantly due to the destabilisation effects of roughness.
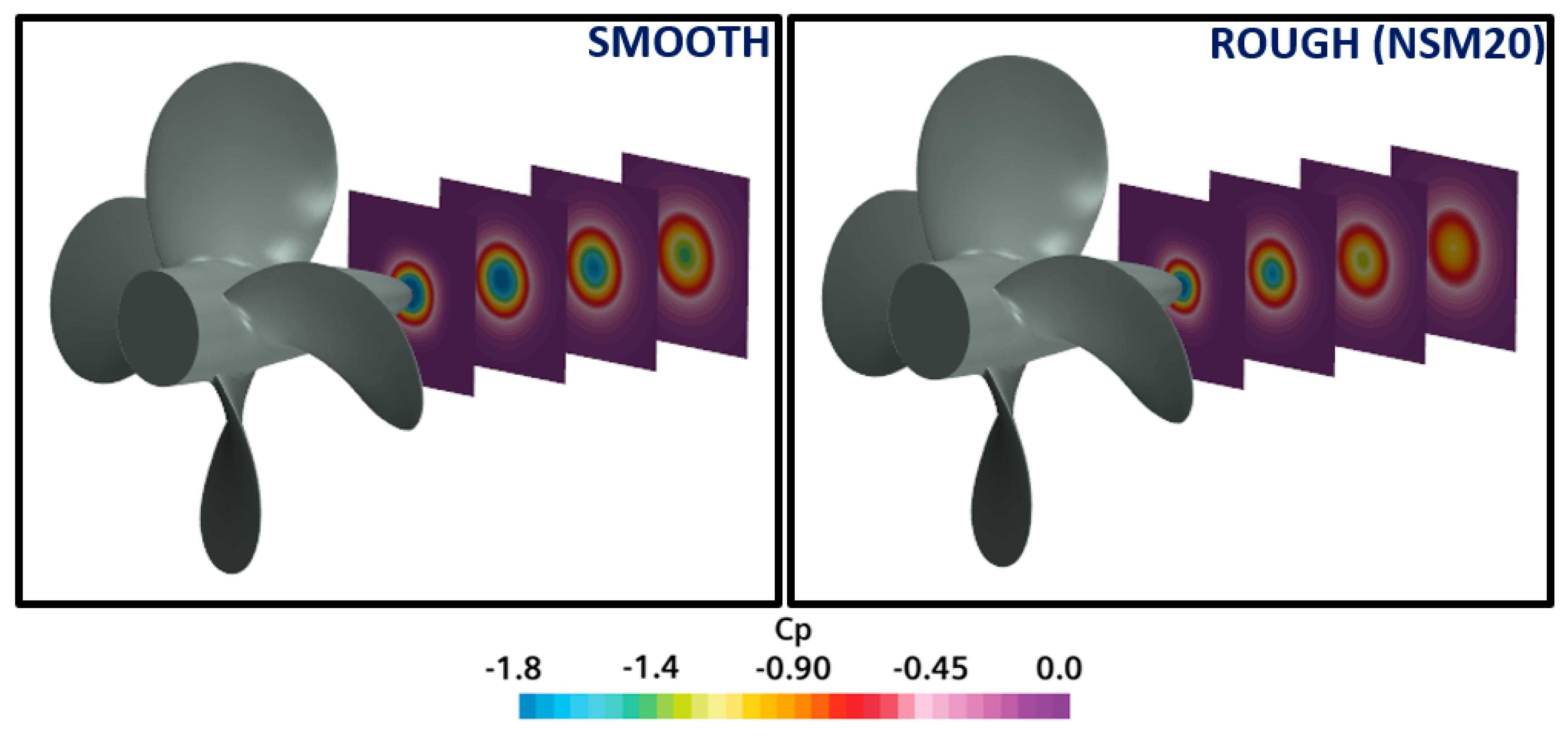
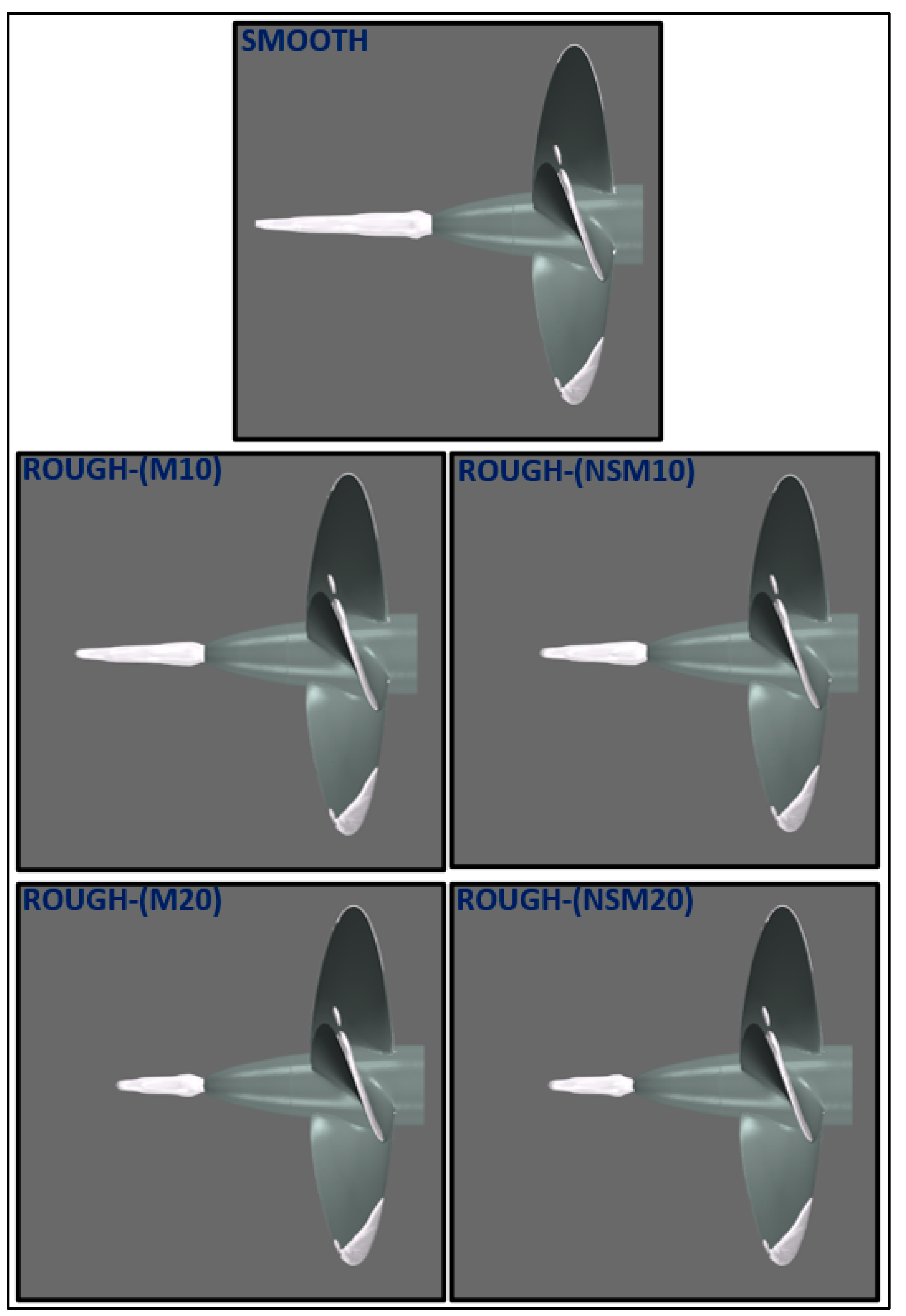
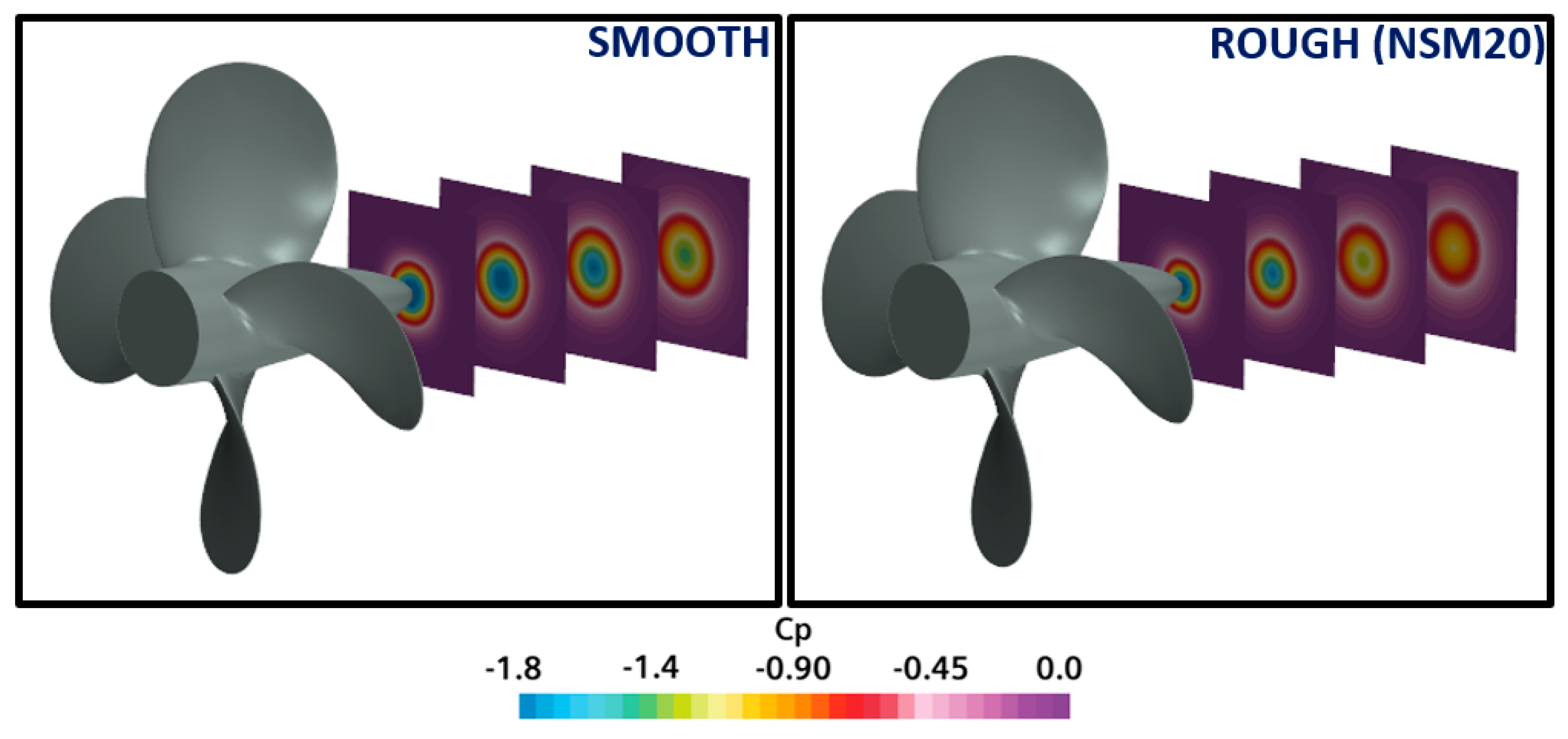
- As the roughness changed the flow properties, the pressure inside the hub vortex increased. This increased pressure inside the vortex enabled hub vortex cavitation mitigation up to 50% depending on the roughness height applied to the hub with respect to the smooth condition.
- Finally, this novel concept will be further explored and it will be incorporated with the propeller URN prediction and erosion models using CFD for model- and full-scale propellers operating under non-uniform flow conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- MEPC.1/Circ.833; Guidelines for the Reduction of Underwater Noise from Commercial Shipping to Address Adverse Impacts on Marine Life. International Maritime Organization (IMO): London, UK, 2014.
- Hildebrand, J. Sources of anthropogenic sound in the marine environment. In Proceedings of the International Policy Workshop on Sound and Marine Mammals, London, UK, 28–30 September 2004. [Google Scholar]
- Cruz, E.; Lloyd, T.; Bosschers, J.; Lafeber, F.H.; Vinagre, P.; Vaz, G. Study on Inventory of Existing Policy, Research and Impacts of Continuous Underwater Noise in Europe; EMSA report EMSA/NEG/21/2020; WavEC Offshore Renewables: Lisbon, Portugal; Maritime Research Institute: Wageningen, The Netherlands, 2021. [Google Scholar]
- Breeze, H.; Nolet, V.; Thomson, D.; Wright, A.J.; Marotte, E.; Sanders, M. Efforts to advance underwater noise management in Canada: Introduction to the Marine Pollution Bulletin Special Issue. Mar. Pollut. Bull. 2022, 178, 113596. [Google Scholar] [CrossRef] [PubMed]
- Renilson, M.; Leaper, R.; Boisseau, O. Hydro-acoustic noise from merchant ships-impacts and practical mitigation techniques. In Proceedings of the Third International Symposium on Marine Propulsors, SMP’13, Tasmania, Australia, 5–8 May 2013. [Google Scholar]
- Bosschers, J. Propeller Tip-Vortex Cavitation and its Broadband Noise. Ph.D. Thesis, Universtiy of Twente, Enschede, The Netherlands, 2018. [Google Scholar]
- Carlton, J. Marine Propellers and Propulsion, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2018. [Google Scholar]
- Atlar, M.; Takinaci, A.C.; Korkut, E. On the Efficiency and Cavitation Performance of a Propeller with Different Boss Caps. In Proceedings of the International Symposium Honouring Tarik SABUNCU On the Occasion of His 75th Birthday, Istanbul Technical University, Istanbul, Turkey, 17 December 1998. [Google Scholar]
- Ghassemi, H.; Mardan, A.; Ardeshir, A. Numerical Analysis of Hub Effect on Hydrodynamic Performance of Propellers with Inclusion of PBCF to Equalize the Induced Velocity. Pol. Marit. Res. 2012, 19, 17–24. [Google Scholar] [CrossRef]
- Yakushiji, R. Mechanism of Tip Vortex Cavitation Suppression by Polymer and Water Injection. Ph.D. Thesis, Naval Architecture and Marine Engineering, University of Michigan, Ann Arbor, MI, USA, 2009. [Google Scholar]
- Chekab, M.A.F.; Ghadimi, P.; Djeddi, S.R.; Soroushan, M. Investigation of Different Methods of Noise Reduction for Submerged Marine Propellers and Their Classification. Am. J. Mech. Eng. 2013, 1, 34–42. [Google Scholar] [CrossRef] [Green Version]
- Aktas, B.; Yilmaz, N.; Atlar, M.; Sasaki, N.; Fitzsimmons, P.; Taylor, D. Suppression of Tip Vortex Cavitation Noise of Propellers using PressurePoresTM Technology. J. Mar. Sci. Eng. 2020, 8, 158. [Google Scholar] [CrossRef] [Green Version]
- Asnaghi, A.; Svennberg, U.; Gustafsson, R.; Bensow, R.E. Propeller tip vortex mitigation by roughness application. Appl. Ocean Res. 2020, 106, 102449. [Google Scholar] [CrossRef]
- Stark, C.; Shi, W. Hydroacoustic and hydrodynamic investigation of bio-inspired leading-edge tubercles on marine-ducted thrusters. R. Soc. Open Sci. 2021, 8, 210402. [Google Scholar] [CrossRef] [PubMed]
- Sezen, S.; Uzun, D.; Turan, O.; Atlar, M. Influence of roughness on propeller performance with a view to mitigating tip vortex cavitation. Ocean Eng. 2021, 239, 109703. [Google Scholar] [CrossRef]
- Sezen, S.; Uzun, D.; Ozyurt, R.; Turan, O.; Atlar, M. Effect of biofouling roughness on a marine propeller’s performance including cavitation and underwater radiated noise (URN). Appl. Ocean Res. 2021, 107, 102491. [Google Scholar] [CrossRef]
- Ouchi, K. Effect and Application of PBCF (Propeller Boss Cap Fins). J. Mar. Eng. Soc. Jpn. 1992, 27, 768–778. [Google Scholar] [CrossRef]
- Ouchi, K.; Ogura, M.; Kono, Y.; Orito, H.; Shiotsu, T.; Tamashima, M.; Koizuka, H. A Research and Development of PBCF (Propeller Boss Cap Fins). J. Soc. Nav. Arch. Jpn. 1988, 1988, 66–78. [Google Scholar] [CrossRef]
- Ouchi, K.; Tamashima, M.; Kawasaki, T.; Koizuka, H. A Research and Development of PBCF (Propeller Boss Cap Fins): 2nd Report: Study on Propeller Slipstream and Actual Ship Performance. J. Soc. Nav. Archit. Jpn. 1989, 165, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Kawamura, T.; Ouchi, K.; Nojiri, T. Model and full scale CFD analysis of propeller boss cap fins (PBCF). J. Mar. Sci. Technol. 2012, 17, 469–480. [Google Scholar] [CrossRef]
- Xiong, Y.; Wang, Z.; Qi, W. Numerical study on the influence of boss cap fins on efficiency of controllable-pitch propeller. J. Mar. Sci. Appl. 2013, 12, 13–20. [Google Scholar] [CrossRef]
- Mizzi, K.; Demirel, Y.K.; Banks, C.; Turan, O.; Kaklis, P.; Atlar, M. Design optimisation of Propeller Boss Cap Fins for enhanced propeller performance. Appl. Ocean Res. 2017, 62, 210–222. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Wu, T.; Su, Y.; Peng, H. Numerical prediction on vibration and noise reduction effects of propeller boss cap fins on a propulsion system. Brodogradnja 2020, 71, 1–18. [Google Scholar] [CrossRef]
- Gaggero, S.; Martinelli, M. Comparison of different propeller boss cap fins design for improved propeller performances. Appl. Ocean Res. 2021, 116, 102867. [Google Scholar] [CrossRef]
- Siemens. Star CCM+ 14.06, User Guide; Siemens: Munich, Germany, 2019. [Google Scholar]
- Uzun, D.; Ozyurt, R.; Demirel, Y.K.; Turan, O. Does the barnacle settlement pattern affect ship resistance and powering? Appl. Ocean Res. 2020, 95, 102020. [Google Scholar] [CrossRef]
- Grigson, C. Drag Losses of New Ships Caused by Hull Finish. J. Ship Res. 1992, 36, 182–196. [Google Scholar] [CrossRef]
- Sezen, S.; Atlar, M. An alternative Vorticity based Adaptive Mesh Refinement (V-AMR) technique for tip vortex cavitation modelling of propellers using CFD methods. Ship Technol. Res. 2021, 69, 1–21. [Google Scholar] [CrossRef]
- Salvatore, F.; Streckwall, H.; Van Terwisga, T. Propeller Cavitation Modelling by CFD-Results from the VIRTUE 2008 Rome Workshop. In Proceedings of the First International Symposium on Marine Propulsors, SMP’09, Trondheim, Norway, 22–24 June 2009. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Surfaces | Surface Coverage (%) | Barnacle Height (mm) | Representative Roughness Height (μm) | Equivalent Sand Roughness Height (μm) |
|---|---|---|---|---|
| Mix | 10 | 5, 2.5, 1.25 | 94 | 409 |
| NS Mix | 10 | 5, 2.5, 1.25 | 136 | 635 |
| Mix | 20 | 5, 2.5, 1.25 | 337 | 1366 |
| NS Mix | 20 | 5, 2.5, 1.25 | 408 | 1645 |
| Parameter | Symbol and Unit | Value |
|---|---|---|
| Advance ratio | (-) | 0.71 |
| Rotation Rate | (rps) | 36 |
| Inflow averaged velocity | (m/s) | 5.8 |
| Cavitation number | (-) | 1.763 |
| Vapour pressure | (Pa) | 2337 |
| Parameter | Experiment [29] | CFD |
|---|---|---|
| 0.255 | 0.240 | |
| 0.460 | 0.435 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sezen, S.; Atlar, M. Mitigation of Hub Vortex Cavitation with Application of Roughness. J. Mar. Sci. Eng. 2022, 10, 1426. https://doi.org/10.3390/jmse10101426
Sezen S, Atlar M. Mitigation of Hub Vortex Cavitation with Application of Roughness. Journal of Marine Science and Engineering. 2022; 10(10):1426. https://doi.org/10.3390/jmse10101426
Chicago/Turabian StyleSezen, Savas, and Mehmet Atlar. 2022. "Mitigation of Hub Vortex Cavitation with Application of Roughness" Journal of Marine Science and Engineering 10, no. 10: 1426. https://doi.org/10.3390/jmse10101426
APA StyleSezen, S., & Atlar, M. (2022). Mitigation of Hub Vortex Cavitation with Application of Roughness. Journal of Marine Science and Engineering, 10(10), 1426. https://doi.org/10.3390/jmse10101426