
Decoupled Planes’ Non-Singular Adaptive Integral Terminal Sliding Mode Trajectory Tracking Control for X-Rudder AUVs under Time-Varying Unknown Disturbances


Abstract
:1. Introduction
2. Problem and Model Description
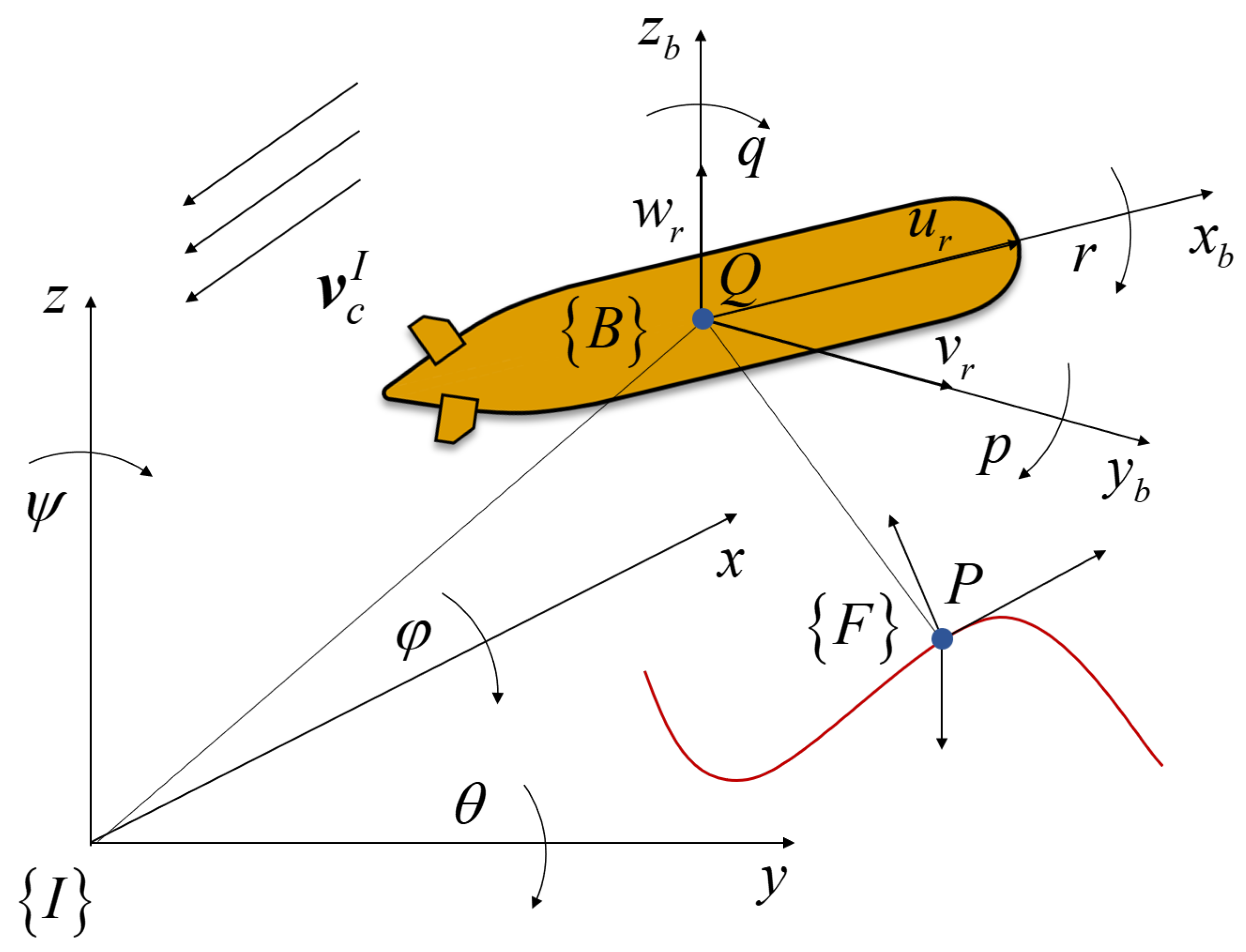
2.1. Notation
2.2. Model of X-AUV
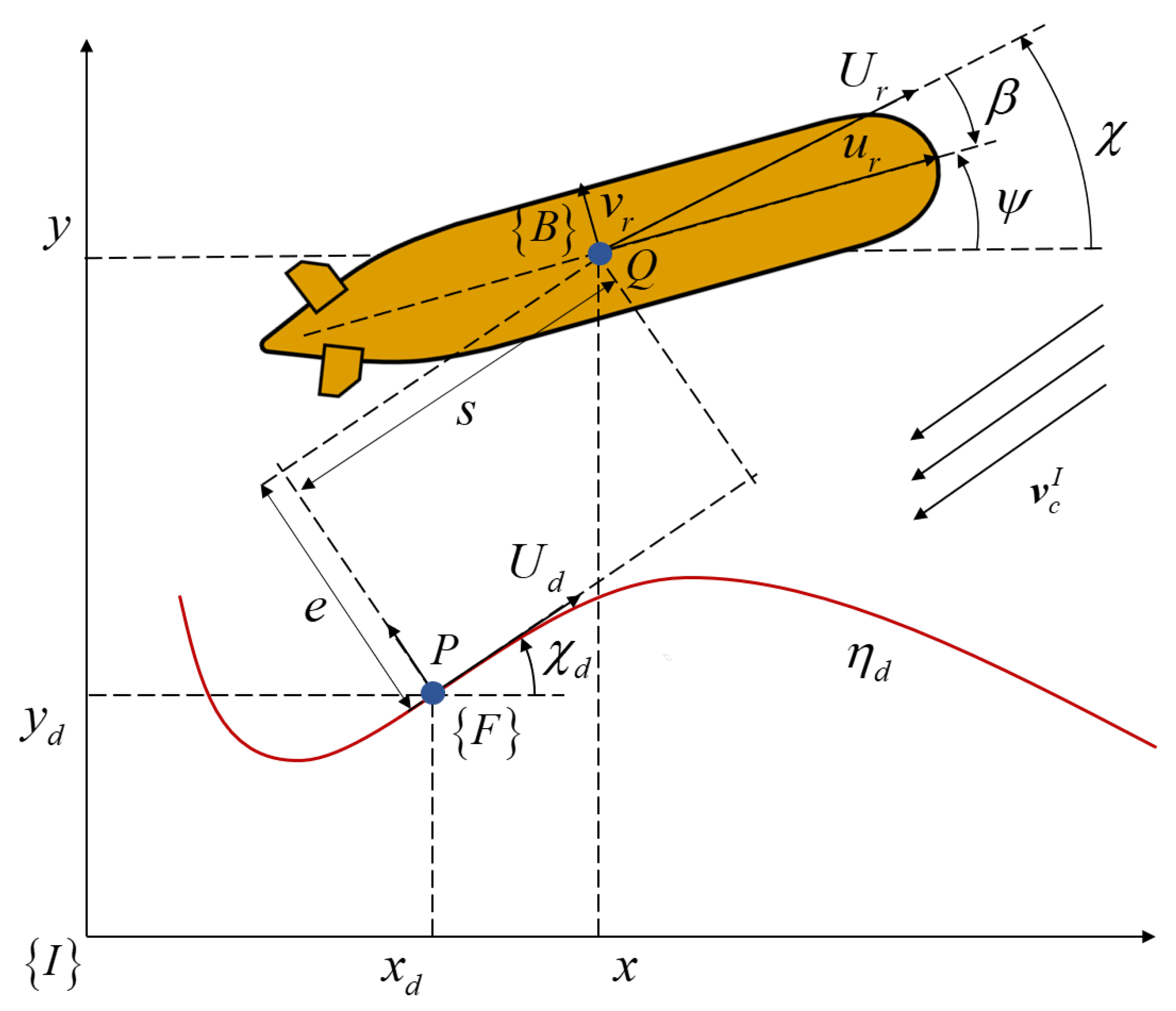
2.2.1. Decoupled Model in the Horizontal Plane
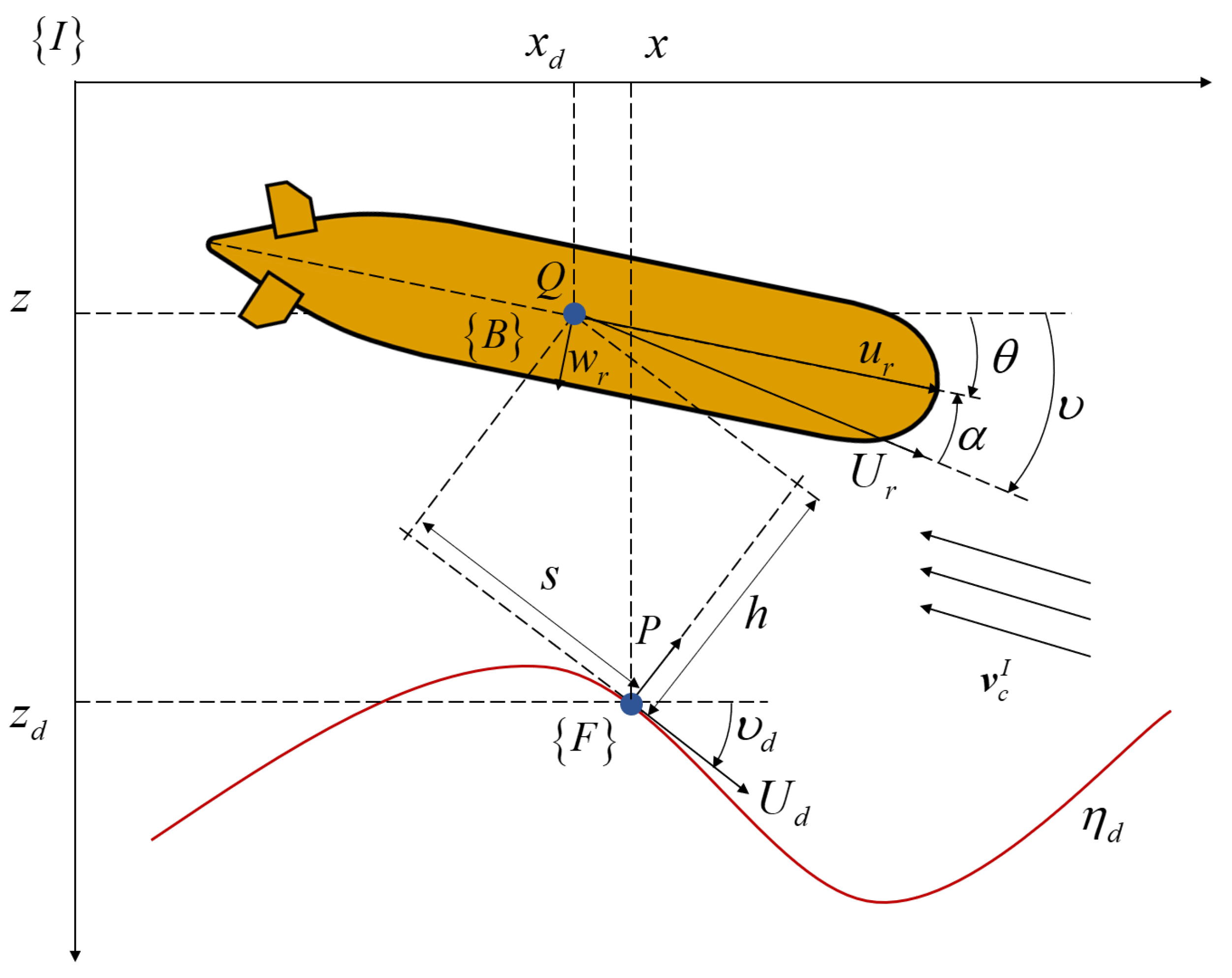
2.2.2. Decoupled Model in the Vertical Plane
2.3. Control Objectives
3. Controller Design
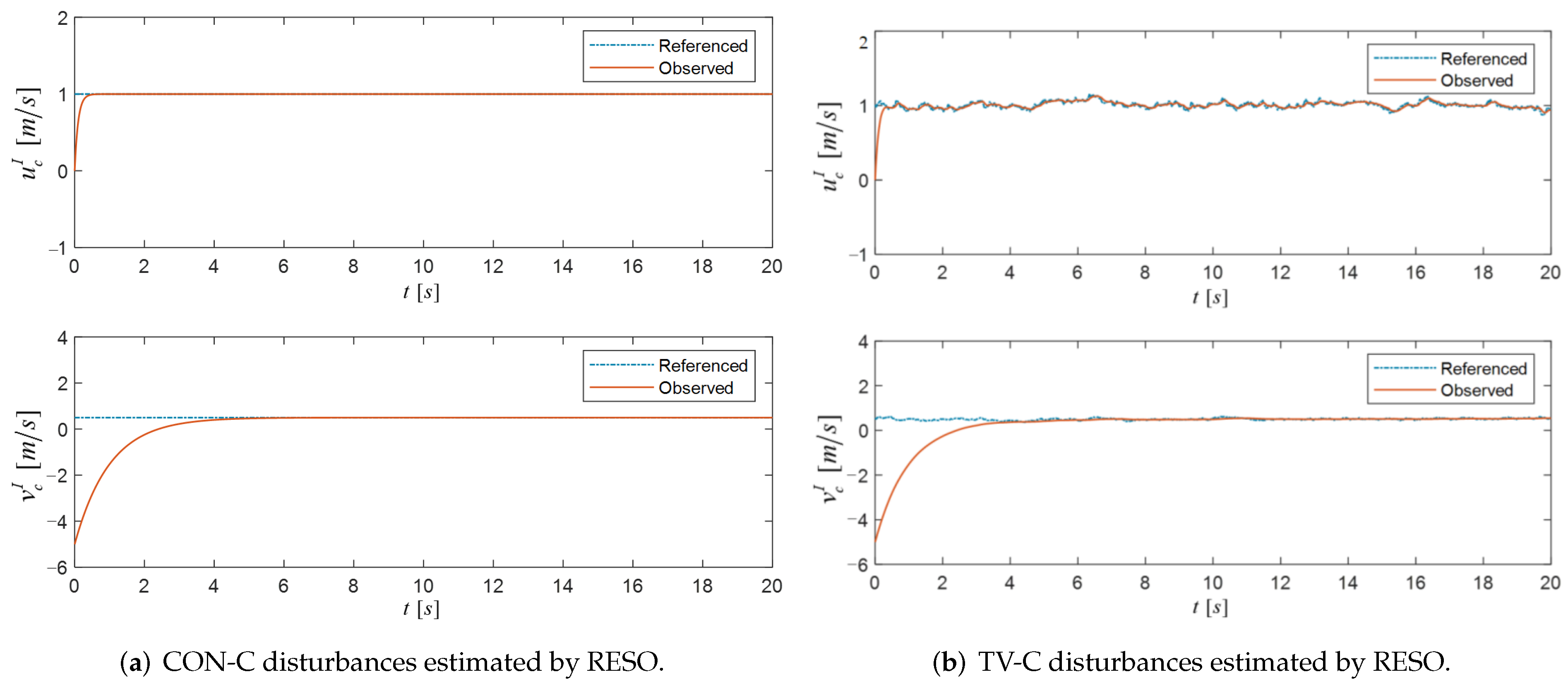
3.1. Ocean Currents Observer
3.2. Kinematic Controller Based on Guidance Law
3.2.1. Kinematics Controller in the Horizontal Plane
3.2.2. Kinematics Controller in the Vertical Plane
3.3. Dynamic Controller
3.3.1. Dynamic Controller in the Horizontal Plane
3.3.2. Dynamic Controller in the Vertical Plane
4. Stability Analysis
- If , .
- If , , then .
- If , , then .
5. Numerical Simulations
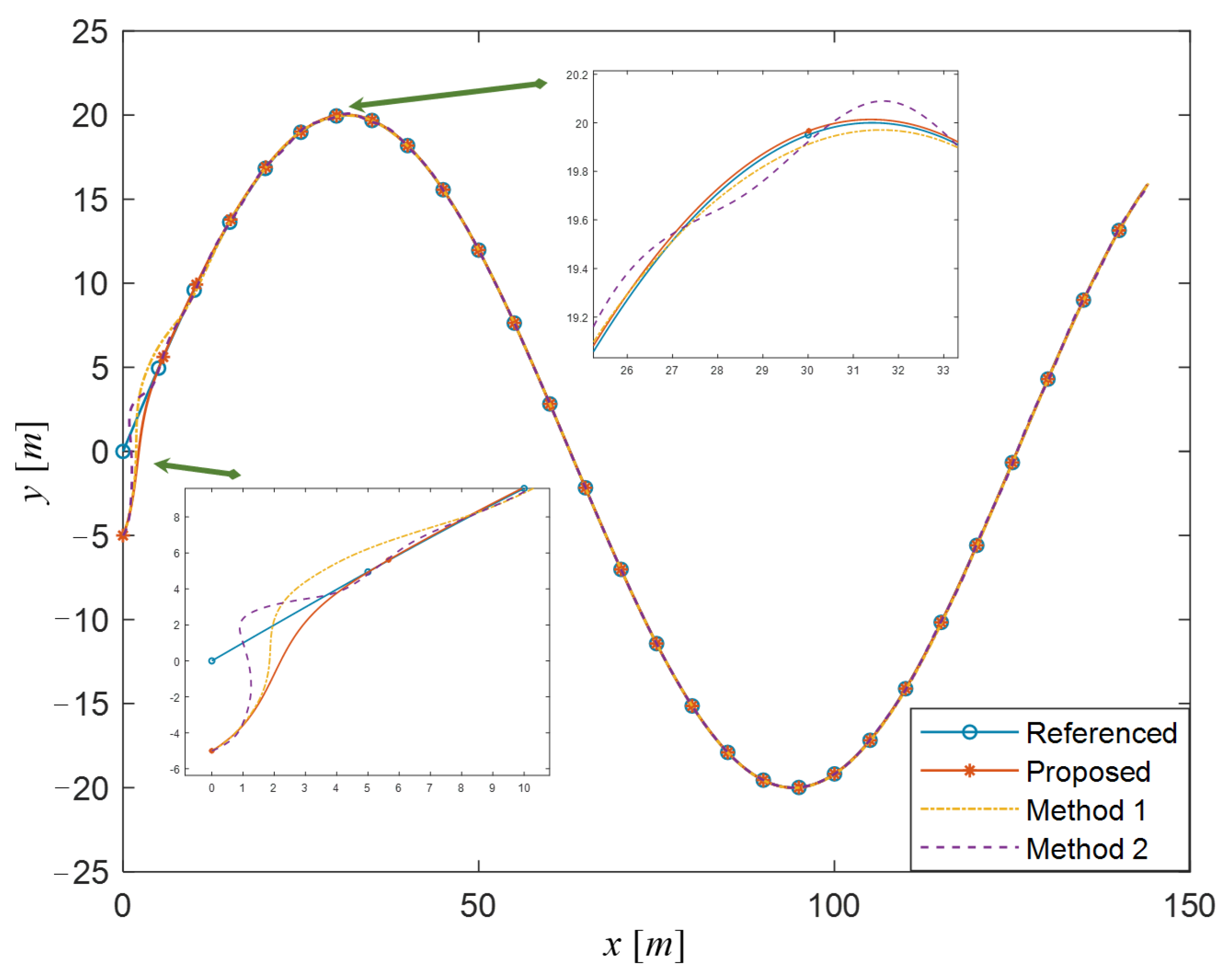
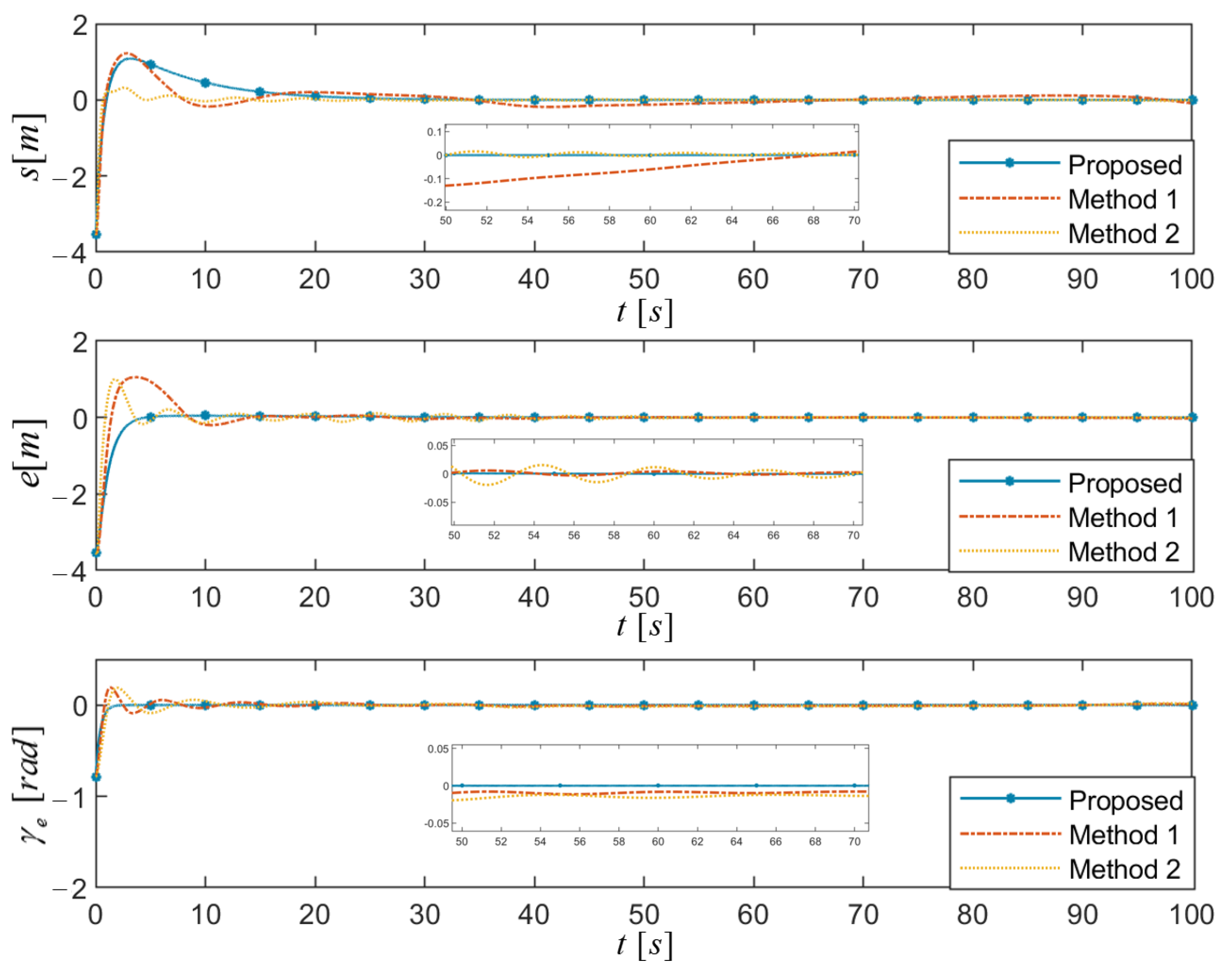
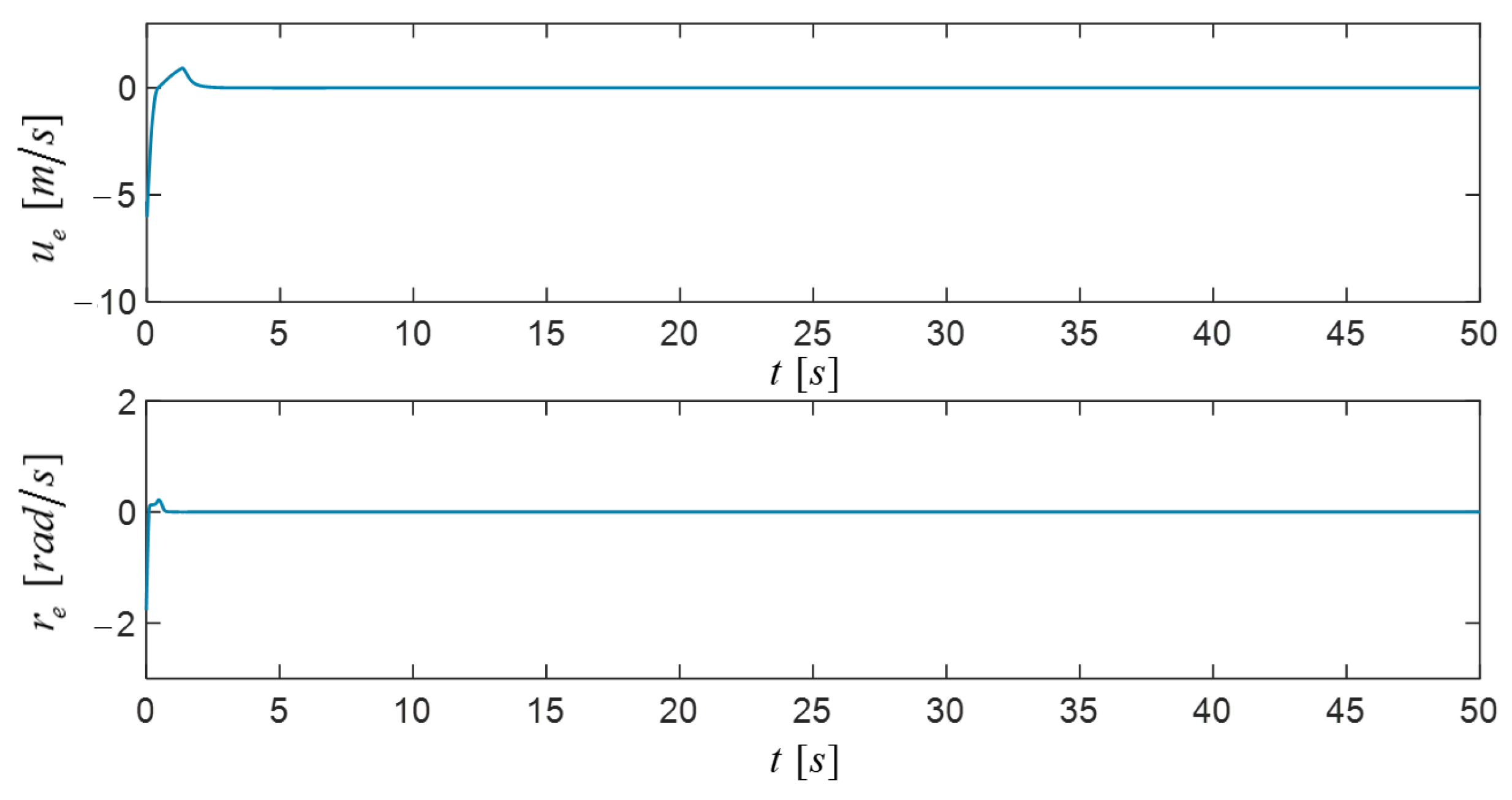
5.1. Case I: Sinusoidal Trajectory Tracking
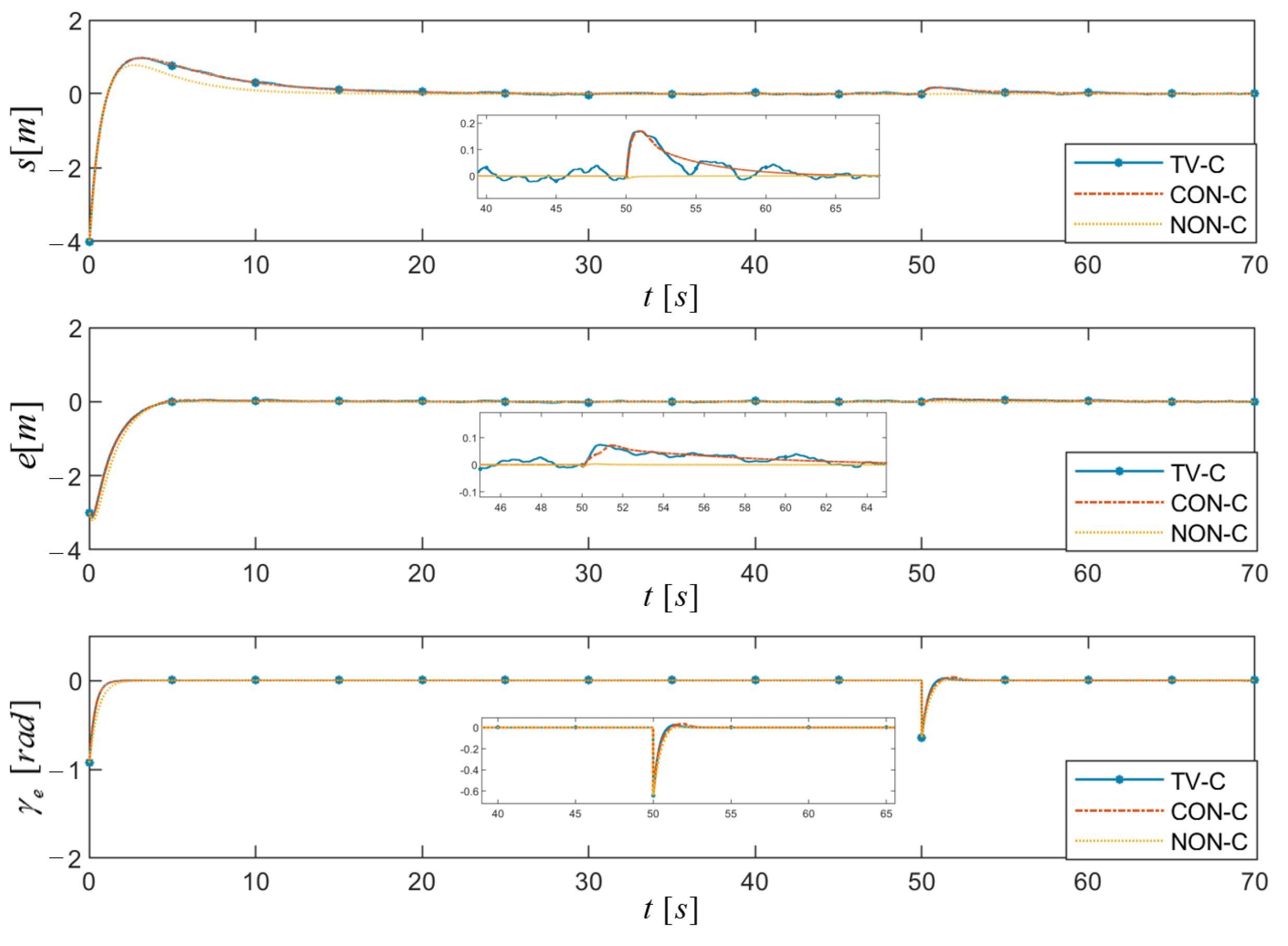
5.2. Case II: Compound Trajectory Tracking
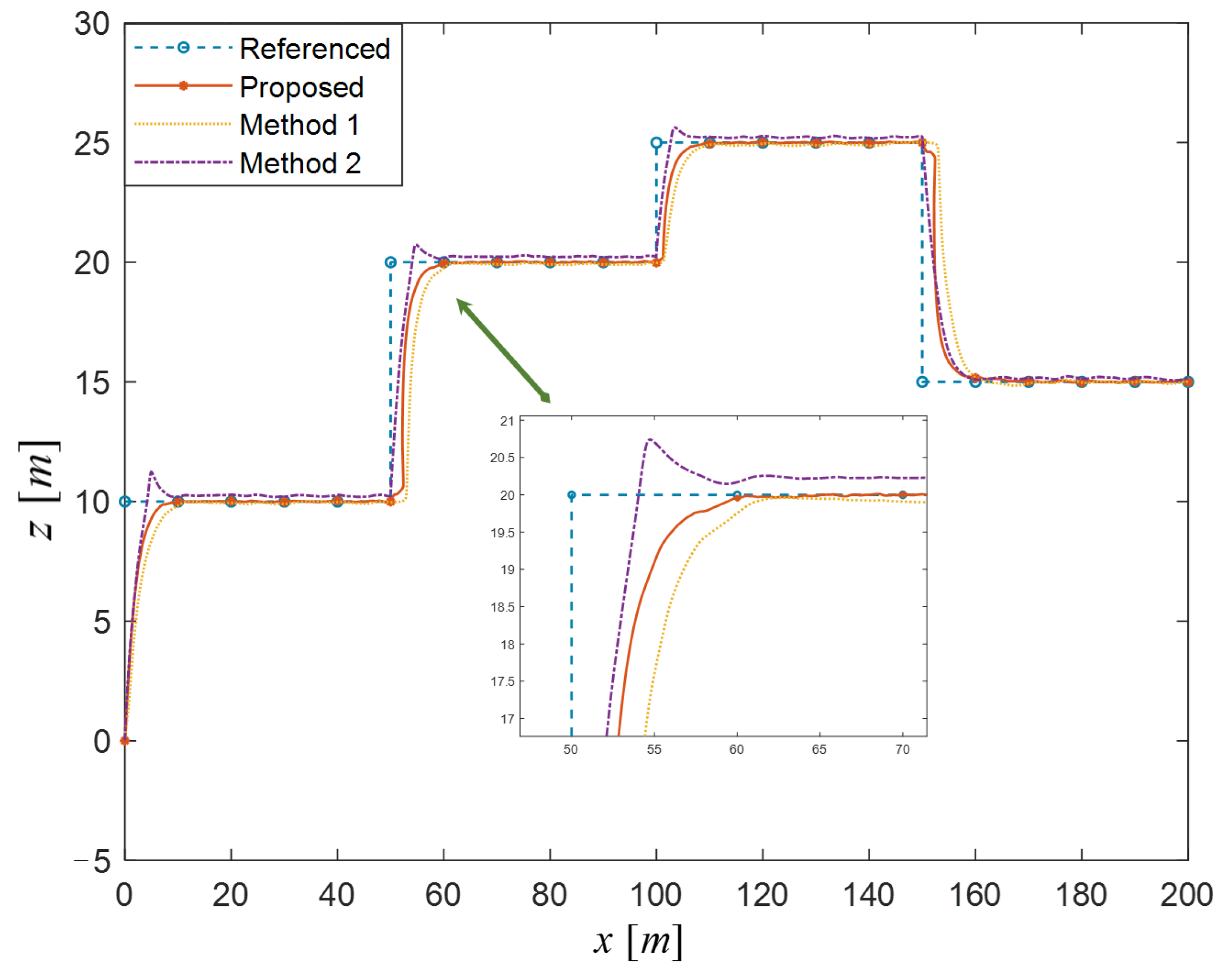
5.3. Case III: Trajectory Tracking of Variable Depth
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lv, T.; Zhang, M.; Wang, Y. Prediction-Based Region Tracking Control Scheme for Autonomous Underwater Vehicle. J. Mar. Sci. Eng. 2022, 10, 775. [Google Scholar] [CrossRef]
- Liu, Z.; Cai, W.; Zhang, M.; Lv, S. Improved Integral Sliding Mode Control-Based Attitude Control Design and Experiment for High Maneuverable AUV. J. Mar. Sci. Eng. 2022, 10, 795. [Google Scholar] [CrossRef]
- Li, D.; Du, L. Auv trajectory tracking models and control strategies: A review. J. Mar. Sci. Eng. 2021, 9, 1020. [Google Scholar] [CrossRef]
- Miao, J.; Wang, S.; Zhao, Z.; Li, Y.; Tomovic, M.M. Spatial curvilinear path following control of underactuated AUV with multiple uncertainties. ISA Trans. 2017, 67, 107–130. [Google Scholar] [CrossRef]
- Fang, Y.; Pu, J.; Yuan, C.; Cao, Y.; Liu, S. A control strategy of normal motion and active self-rescue for autonomous underwater vehicle based on deep reinforcement learning. AIP Adv. 2022, 12, 015219. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Hespanha, J.P. Trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty. IEEE Trans. Autom. Control 2007, 52, 1362–1379. [Google Scholar] [CrossRef] [Green Version]
- Roy, S.; Shome, S.; Nandy, S.; Ray, R.; Kumar, V. Trajectory following control of AUV: A robust approach. J. Inst. Eng. (India) Ser. C 2013, 94, 253–265. [Google Scholar] [CrossRef]
- Jiang, Y.; Guo, C.; Yu, H. Robust trajectory tracking control for an underactuated autonomous underwater vehicle based on bioinspired neurodynamics. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418806745. [Google Scholar] [CrossRef] [Green Version]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles. Ocean Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Lapierre, L.; Zhang, Q. Nonlinear guidance and fuzzy control for three-dimensional path following of an underactuated autonomous underwater vehicle. Ocean Eng. 2017, 146, 457–467. [Google Scholar]
- Patre, B.; Londhe, P.; Waghmare, L.; Mohan, S. Disturbance estimator based non-singular fast fuzzy terminal sliding mode control of an autonomous underwater vehicle. Ocean Eng. 2018, 159, 372–387. [Google Scholar] [CrossRef]
- Kim, E.; Fan, S.; Bose, N.; Nguyen, H. Current estimation and path following for an autonomous underwater vehicle (AUV) by using a high-gain observer based on an AUV dynamic model. Int. J. Control. Autom. Syst. 2021, 19, 478–490. [Google Scholar] [CrossRef]
- Liang, X.; Qu, X.; Hou, Y.; Ma, Q. Three-dimensional trajectory tracking control of an underactuated autonomous underwater vehicle based on ocean current observer. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418806811. [Google Scholar] [CrossRef]
- Miao, J.; Wang, S.; Tomovic, M.M.; Zhao, Z. Compound line-of-sight nonlinear path following control of underactuated marine vehicles exposed to wind, waves, and ocean currents. Nonlinear Dyn. 2017, 89, 2441–2459. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Wilson, P.A.; Zhang, Q. Guidance-error-based robust fuzzy adaptive control for bottom following of a flight-style AUV with saturated actuator dynamics. IEEE Trans. Cybern. 2019, 50, 1887–1899. [Google Scholar] [CrossRef] [Green Version]
- Rezazadegan, F.; Shojaei, K.; Sheikholeslam, F.; Chatraei, A. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties. Ocean Eng. 2015, 107, 246–258. [Google Scholar] [CrossRef]
- Wang, W.; Xia, Y.; Chen, Y.; Xu, G.; Chen, Z.; Xu, K. Motion control methods for X-rudder underwater vehicles: Model based sliding Mode and non-model based iterative sliding mode. Ocean Eng. 2020, 216, 108054. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Huang, Z.; Wang, W.; Xu, G.; Li, Y. Adaptive energy-efficient tracking control of a X rudder AUV with actuator dynamics and rolling restriction. Appl. Ocean Res. 2022, 118, 102994. [Google Scholar] [CrossRef]
- Fang, Y.; Huang, Z.; Pu, J.; Zhang, J. AUV position tracking and trajectory control based on fast-deployed deep reinforcement learning method. Ocean Eng. 2022, 245, 110452. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Rogers, E. Trajectory tracking control for autonomous underwater vehicles based on fuzzy re-planning of a local desired trajectory. IEEE Trans. Veh. Technol. 2019, 68, 11657–11667. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Yu, H.; Guo, C.; Yan, Z. Globally finite-time stable three-dimensional trajectory-tracking control of underactuated UUVs. Ocean Eng. 2019, 189, 106329. [Google Scholar] [CrossRef]
- Rout, R.; Subudhi, B. Inverse optimal self-tuning PID control design for an autonomous underwater vehicle. Int. J. Syst. Sci. 2017, 48, 367–375. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Wang, W.; Xu, G.; Xiang, X.; Li, Y. Optimal robust trajectory tracking control of a X-rudder AUV with velocity sensor failures and uncertainties. Ocean Eng. 2020, 198, 106949. [Google Scholar] [CrossRef]
- Yu, C.; Liu, C.; Xiang, X.; Zeng, Z.; Wei, Z.; Lian, L. Line-of-sight guided time delay control for three-dimensional coupled path following of underactuated underwater vehicles with roll dynamics. Ocean Eng. 2020, 207, 107410. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Sun, Y.; Zeng, J.; Wan, L. Design and simulation of X-rudder AUV’s motion control. Ocean Eng. 2017, 137, 204–214. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Zhang, J.; Cao, J.; Zhang, Y. X-Rudder Autonomous Underwater Vehicle Control Allocation Based on Improved Quadratic Programming Algorithm. J. Shanghai Jiaotong Univ. 2020, 54, 524. [Google Scholar]
- Shengda, S. Submarine Maneuverability; National Defense Industry Press: Beijing, China, 1995; Volume 30–45. [Google Scholar]
- Repoulias, F.; Papadopoulos, E. Planar trajectory planning and tracking control design for underactuated AUVs. Ocean Eng. 2007, 34, 1650–1667. [Google Scholar] [CrossRef]
- Xue, W.; Huang, Y. On performance analysis of ADRC for a class of MIMO lower-triangular nonlinear uncertain systems. ISA Trans. 2014, 53, 955–962. [Google Scholar] [CrossRef] [PubMed]
- Breivik, M.; Fossen, T.I. Principles of guidance-based path following in 2D and 3D. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 627–634. [Google Scholar]
- Breivik, M.; Fossen, T.I. Guidance-based path following for autonomous underwater vehicles. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; pp. 2807–2814. [Google Scholar]
- Roy, S.; Baldi, S.; Fridman, L.M. On adaptive sliding mode control without a priori bounded uncertainty. Automatica 2020, 111, 108650. [Google Scholar] [CrossRef]
- Lei, Q.; Zhang, W. Adaptive non-singular integral terminal sliding mode tracking control for autonomous underwater vehicles. IET Control Theory Appl. 2017, 11, 1293–1306. [Google Scholar]
- Li, Y.; Jiang, Y.q.; Ma, S.; Chen, P.y.; Li, Y.m. Inverse speed analysis and low speed control of underwater vehicle. J. Cent. South Univ. 2014, 21, 2652–2659. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NO. | Methods | Plane | Environment | Purpose |
|---|---|---|---|---|
| Case I | Above methods | Horizontal Plane | CON-C disturbances | Verify the validity of NAITSMC method |
| Case II | Proposed | Horizontal Plane | CON-C, TV-C, and NON-C disturbances | Verify the robustness of NAITSMC method |
| Case III | Above methods | Vertical Plane | TV-C disturbances | Verify the vertical performance of NAITSMC method |
| Ave. | Ave. | Ave. of | Var. of s | Var. of e | Var. of | |
|---|---|---|---|---|---|---|
| Proposed | ||||||
| Method 1 | ||||||
| Method 2 |
| Ave. | Ave. | Ave. of | Var. of s | Var. of e | Var. of | |
|---|---|---|---|---|---|---|
| Under TV-C | ||||||
| Under CON-C | ||||||
| Under NON-C |
| Ave. | Ave. | Ave. of | Var. of s | Var. of h | Var. of | |
|---|---|---|---|---|---|---|
| Proposed | ||||||
| Method 1 | ||||||
| Method 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, C.; Shuai, C.; Fang, Y.; Ma, J. Decoupled Planes’ Non-Singular Adaptive Integral Terminal Sliding Mode Trajectory Tracking Control for X-Rudder AUVs under Time-Varying Unknown Disturbances. J. Mar. Sci. Eng. 2022, 10, 1408. https://doi.org/10.3390/jmse10101408
Yuan C, Shuai C, Fang Y, Ma J. Decoupled Planes’ Non-Singular Adaptive Integral Terminal Sliding Mode Trajectory Tracking Control for X-Rudder AUVs under Time-Varying Unknown Disturbances. Journal of Marine Science and Engineering. 2022; 10(10):1408. https://doi.org/10.3390/jmse10101408
Chicago/Turabian StyleYuan, Chengren, Changgeng Shuai, Yuan Fang, and Jianguo Ma. 2022. "Decoupled Planes’ Non-Singular Adaptive Integral Terminal Sliding Mode Trajectory Tracking Control for X-Rudder AUVs under Time-Varying Unknown Disturbances" Journal of Marine Science and Engineering 10, no. 10: 1408. https://doi.org/10.3390/jmse10101408
APA StyleYuan, C., Shuai, C., Fang, Y., & Ma, J. (2022). Decoupled Planes’ Non-Singular Adaptive Integral Terminal Sliding Mode Trajectory Tracking Control for X-Rudder AUVs under Time-Varying Unknown Disturbances. Journal of Marine Science and Engineering, 10(10), 1408. https://doi.org/10.3390/jmse10101408