
URANS Calculation of Ship Heave and Pitch Motions in Marine Simulator Based on Overset Mesh


Abstract
:1. Introduction
2. Materials and Methods
2.1. Fluid Governing Equation
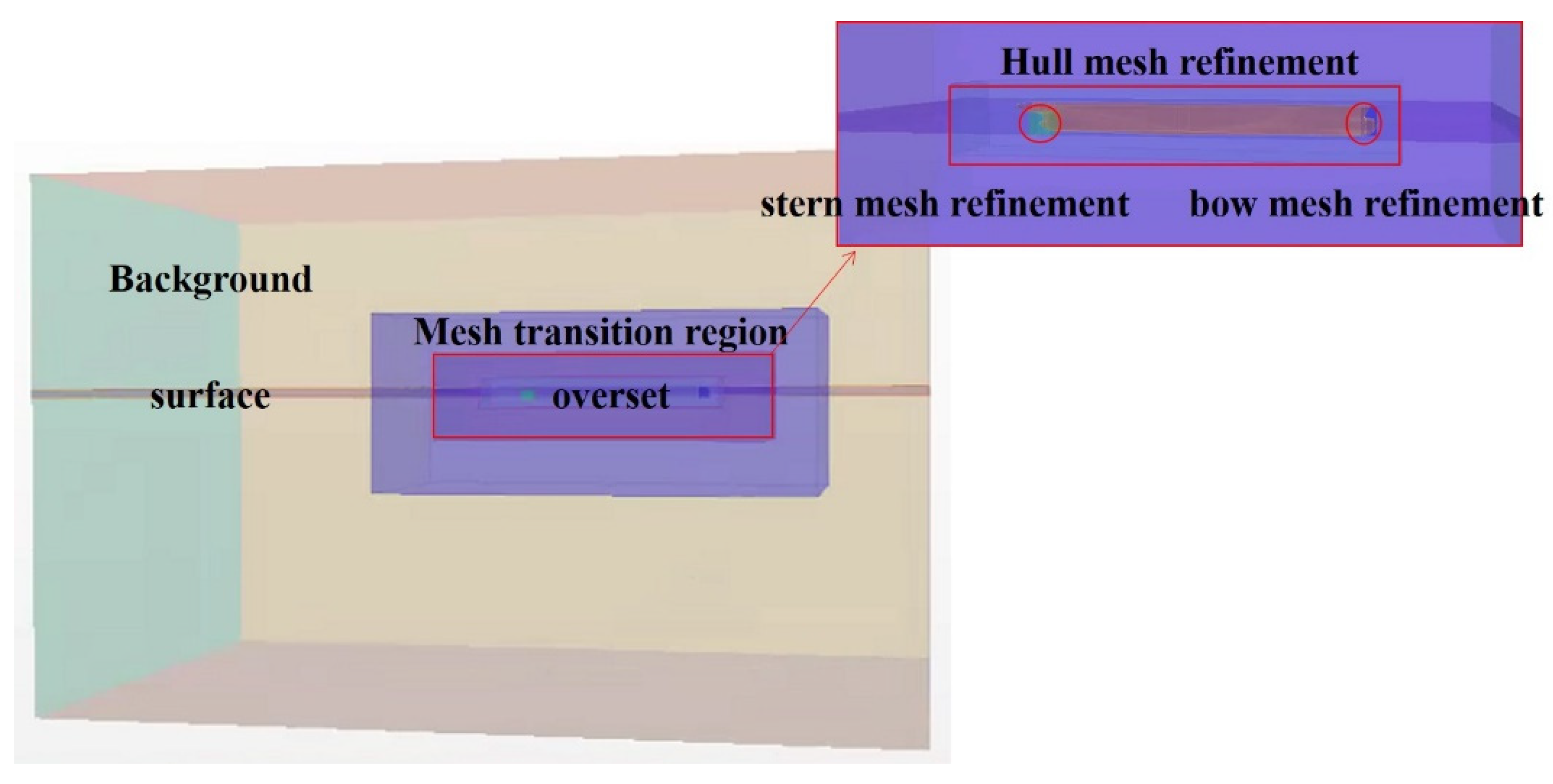
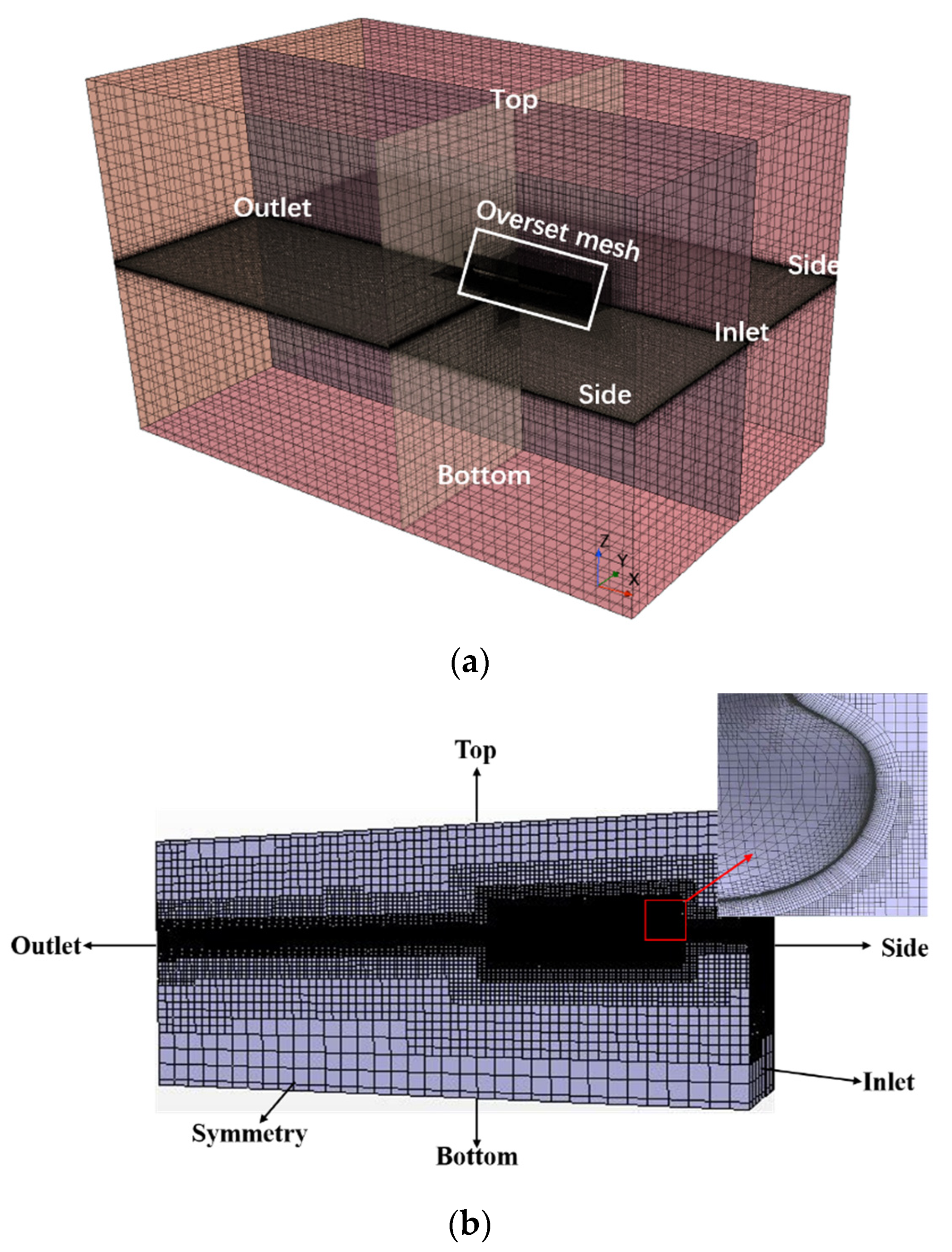
2.2. Overset Mesh
3. Results
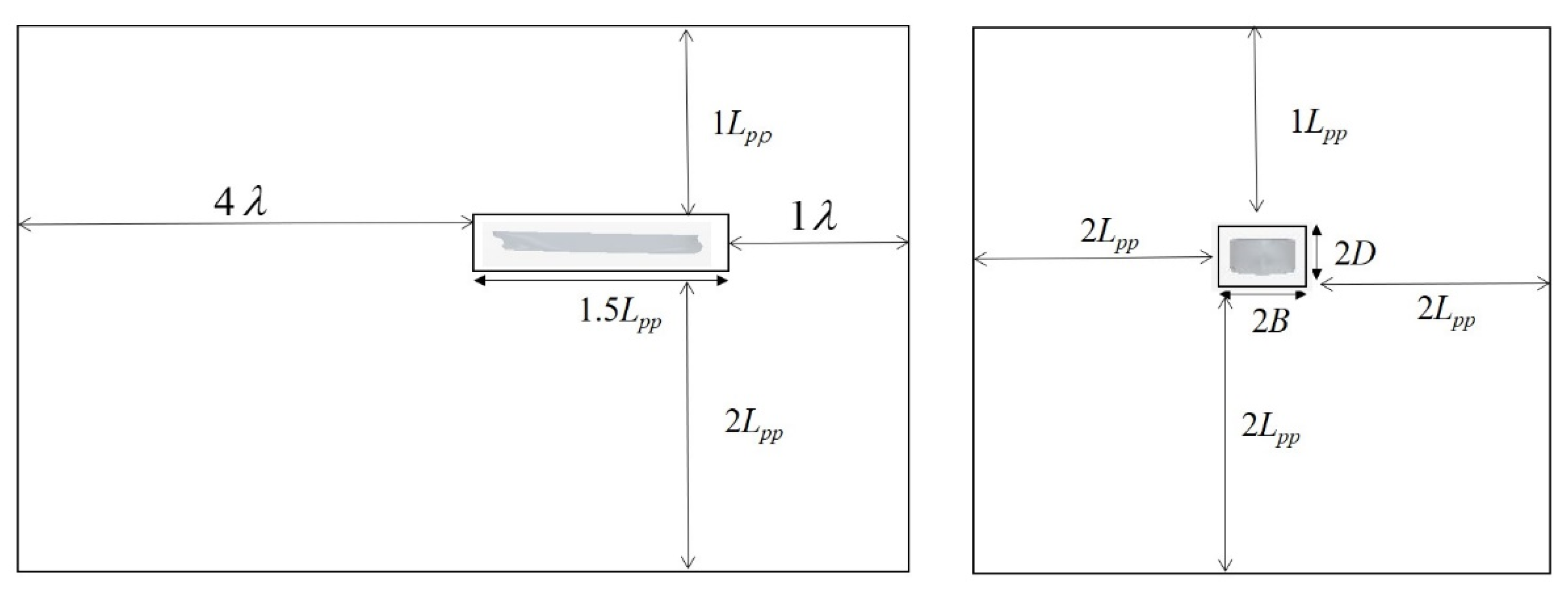
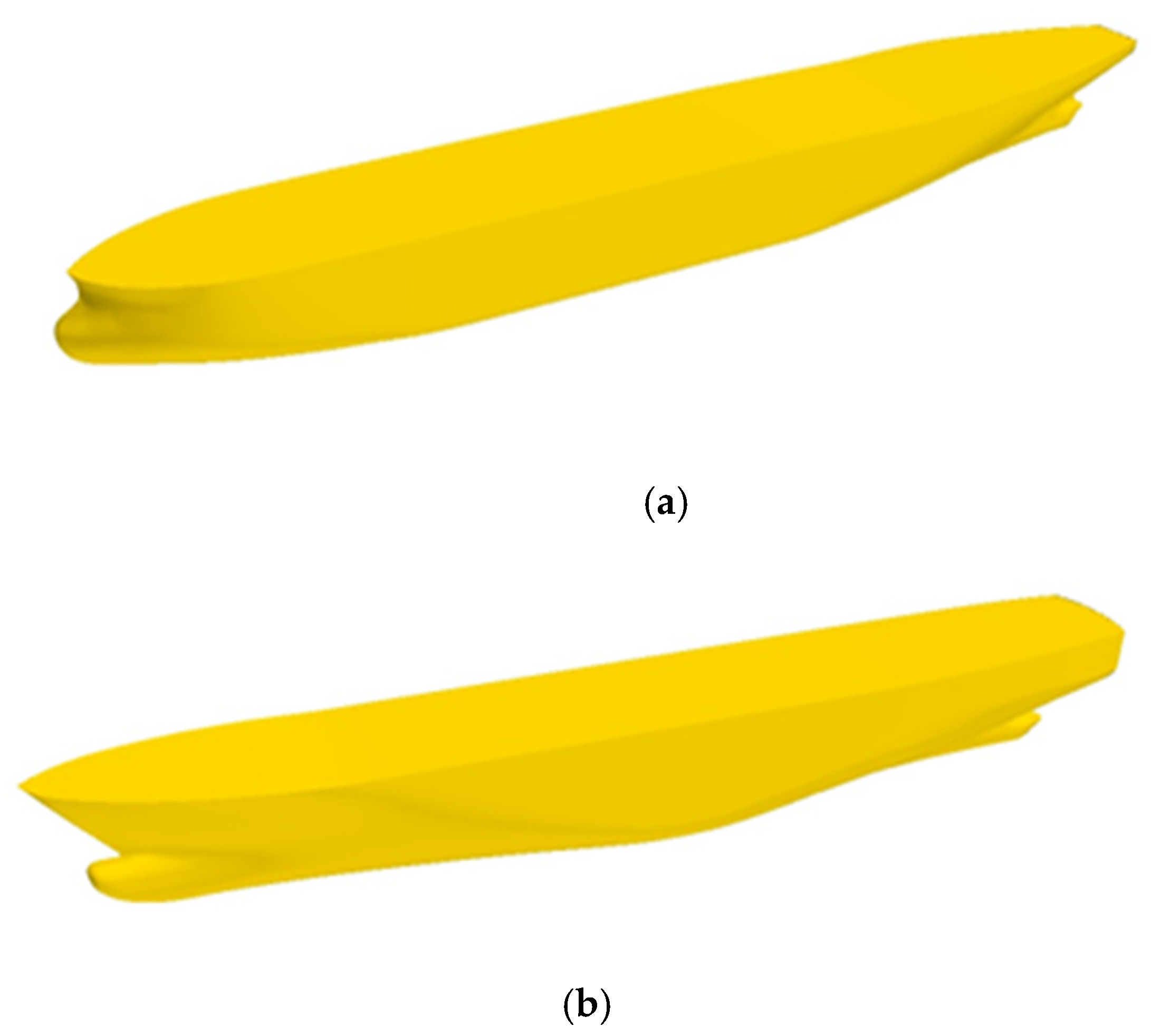
3.1. Test Ship and Numerical Setup
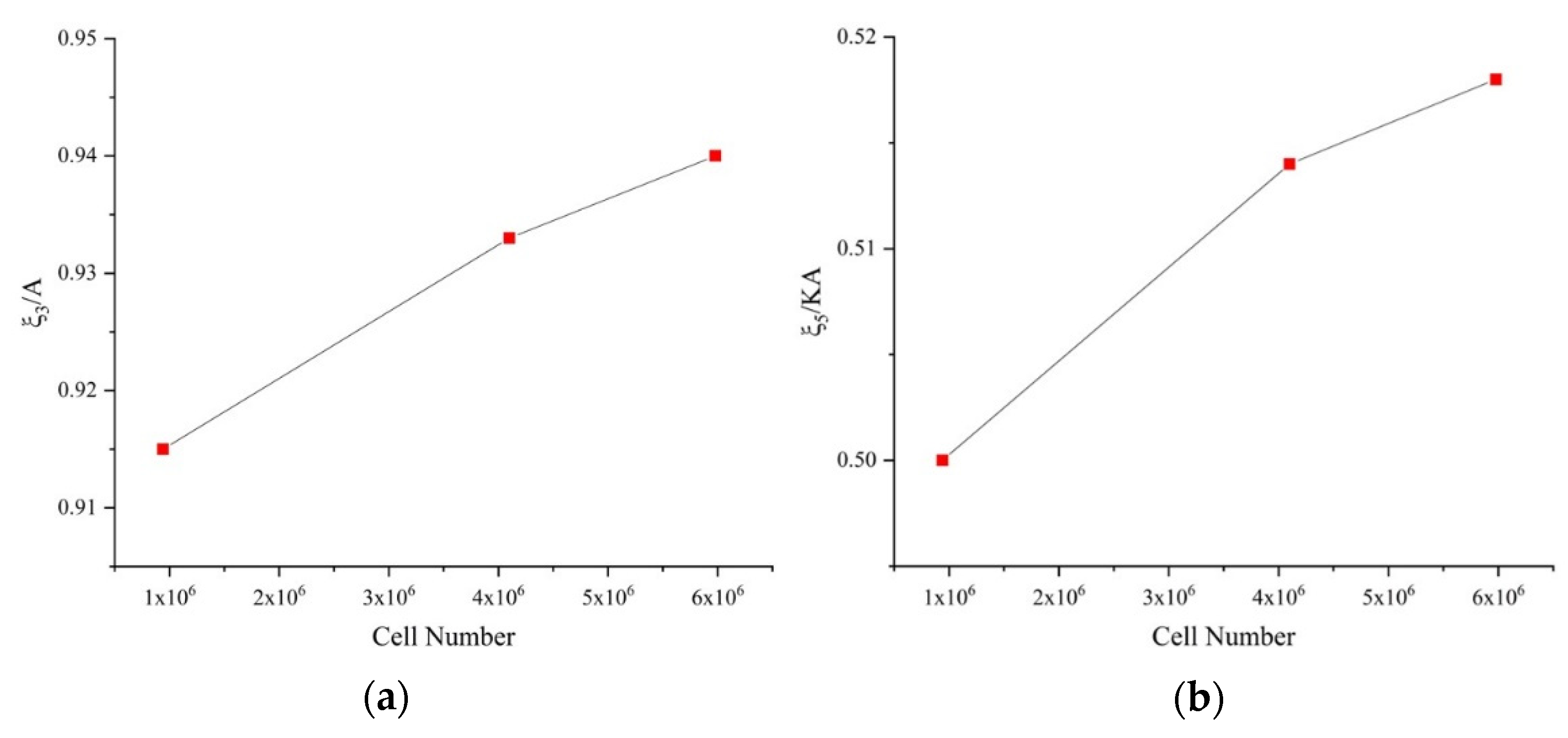
3.2. Mesh Generation and Mesh Independence Study
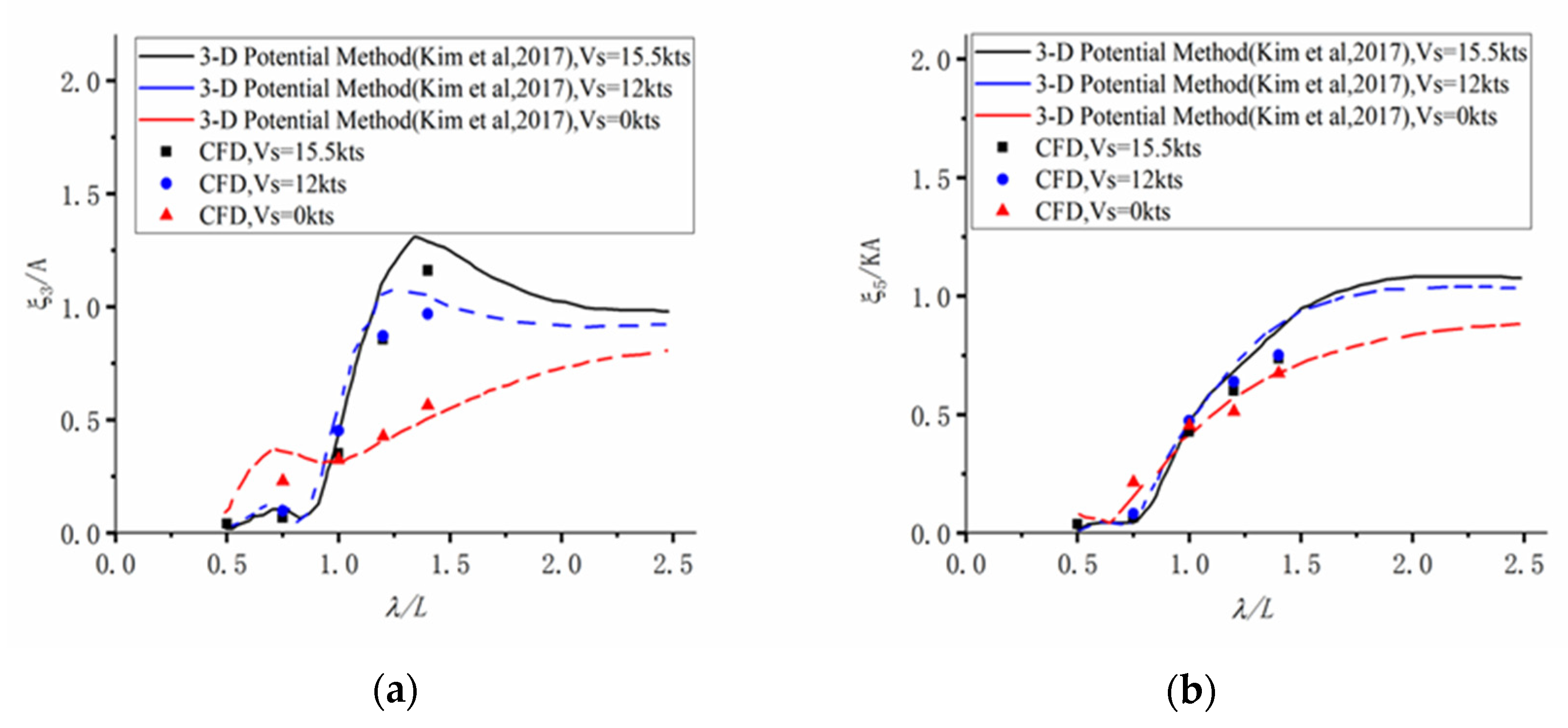
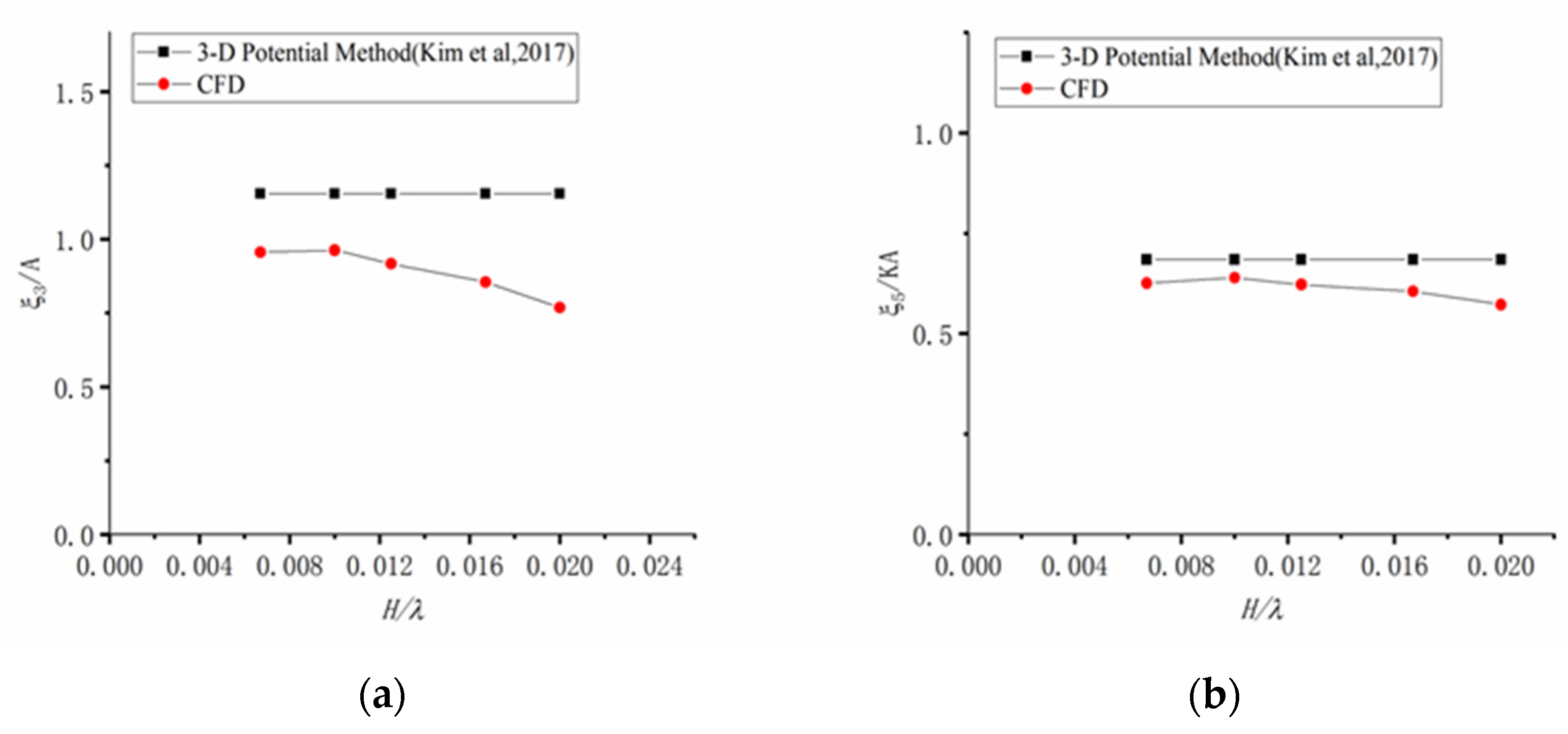
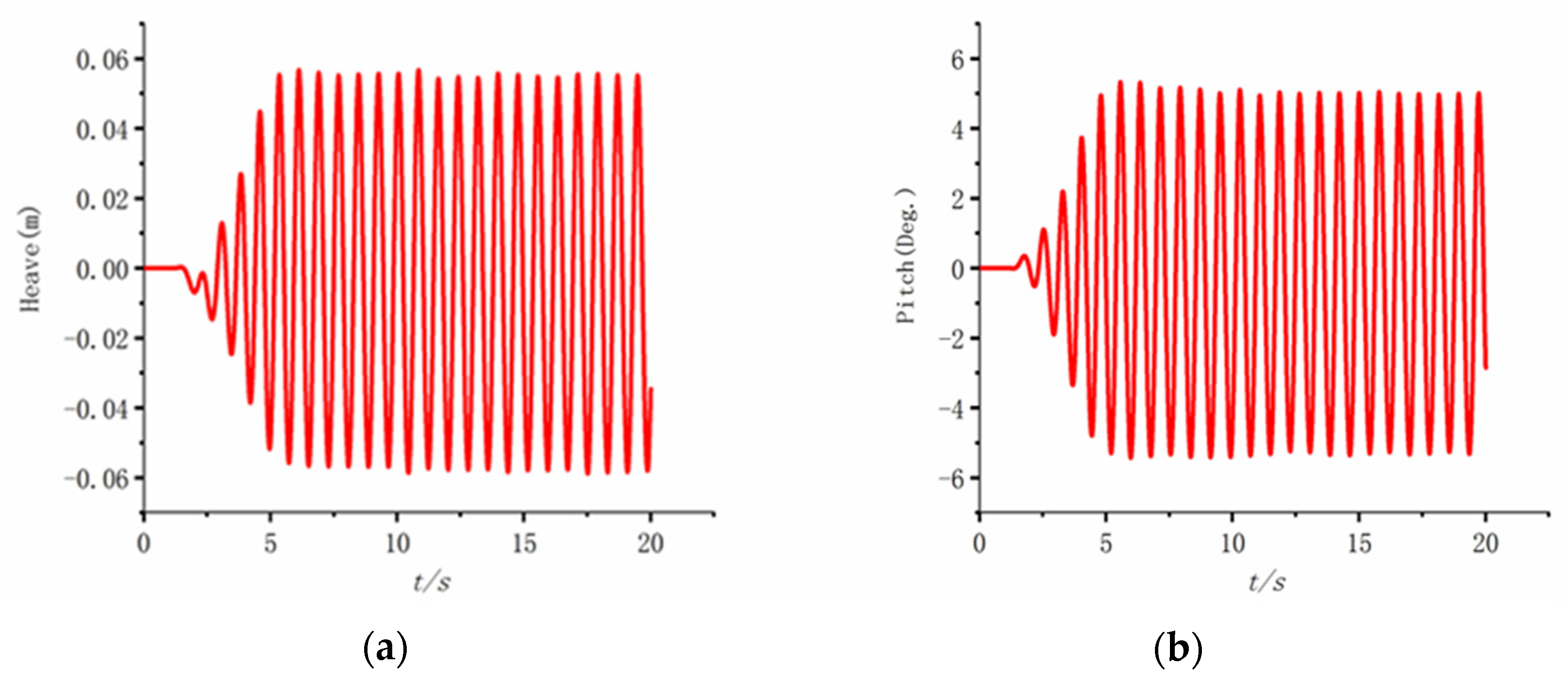
3.3. Numerical Simulation of KVLCC2
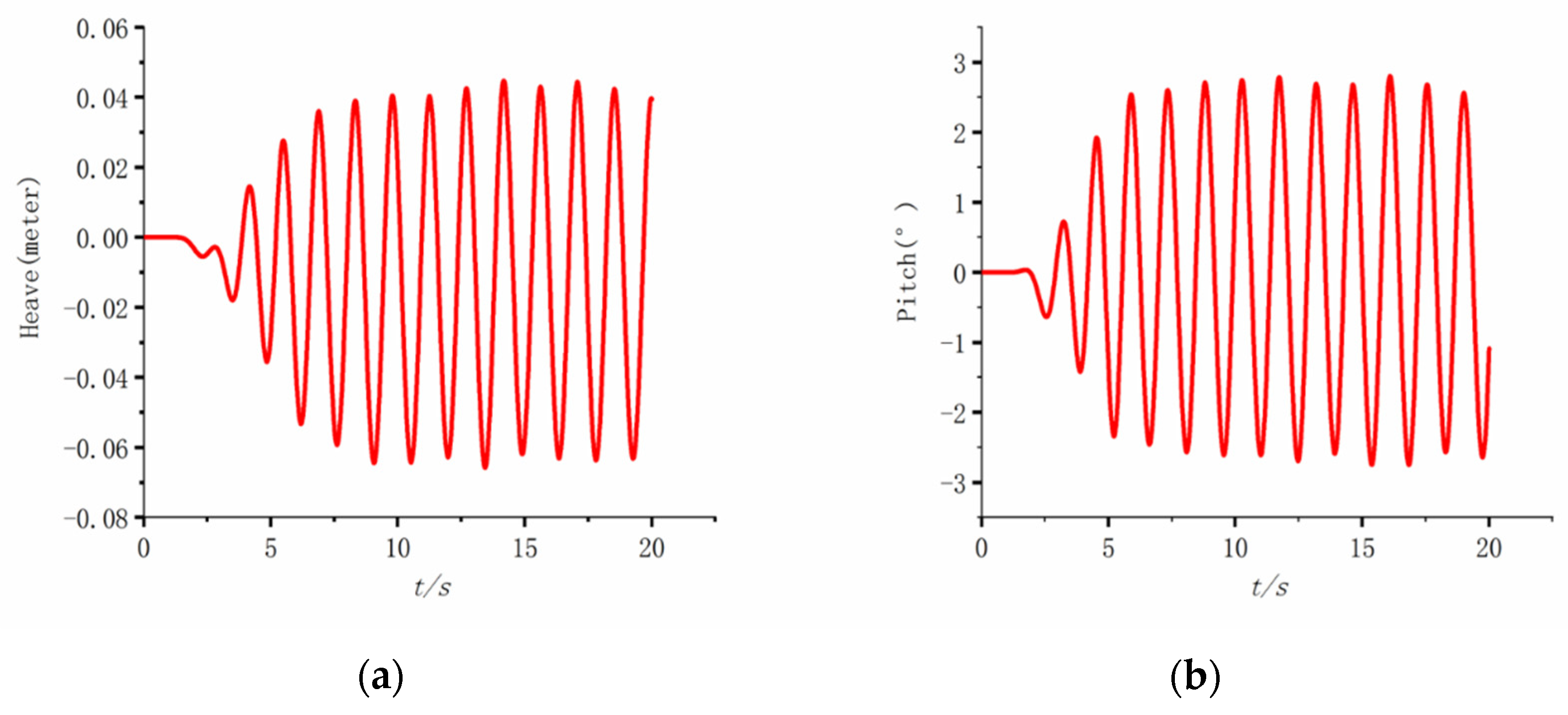
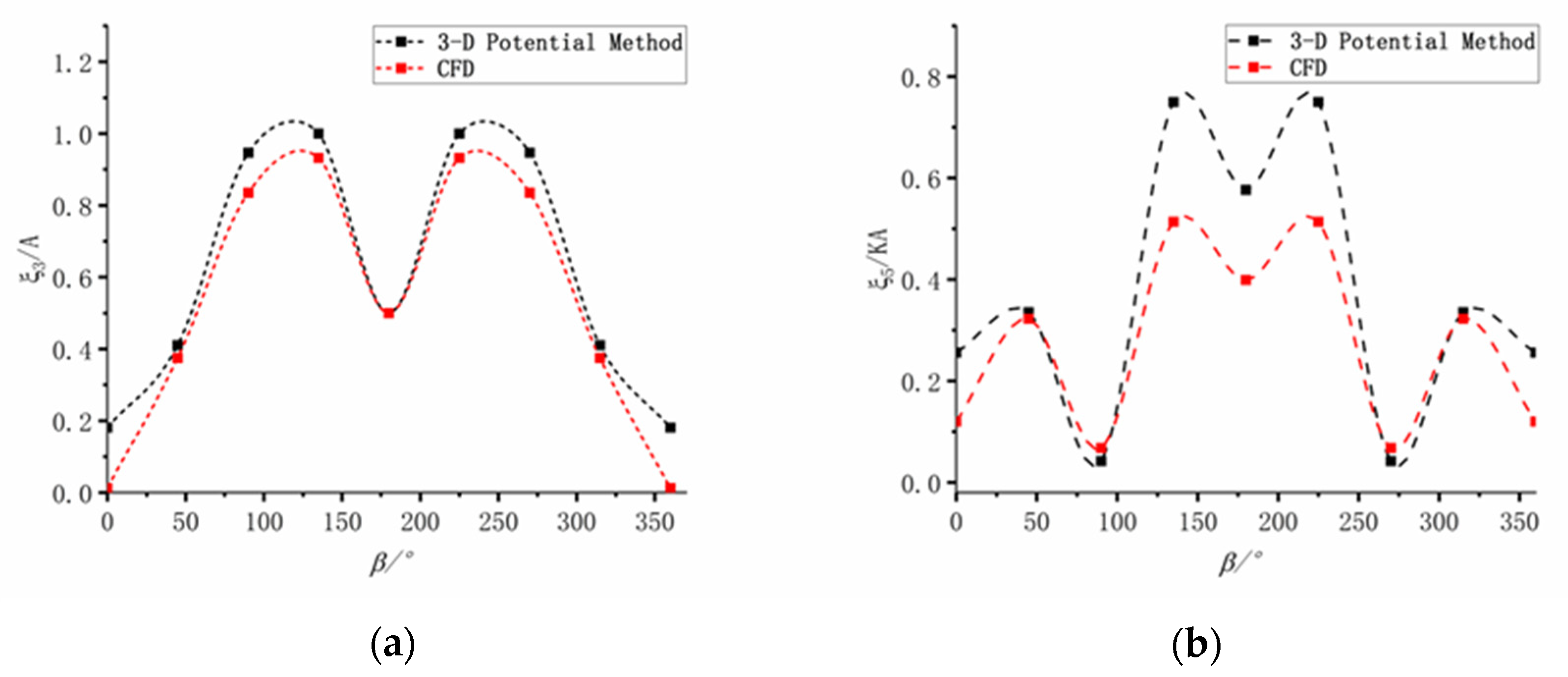
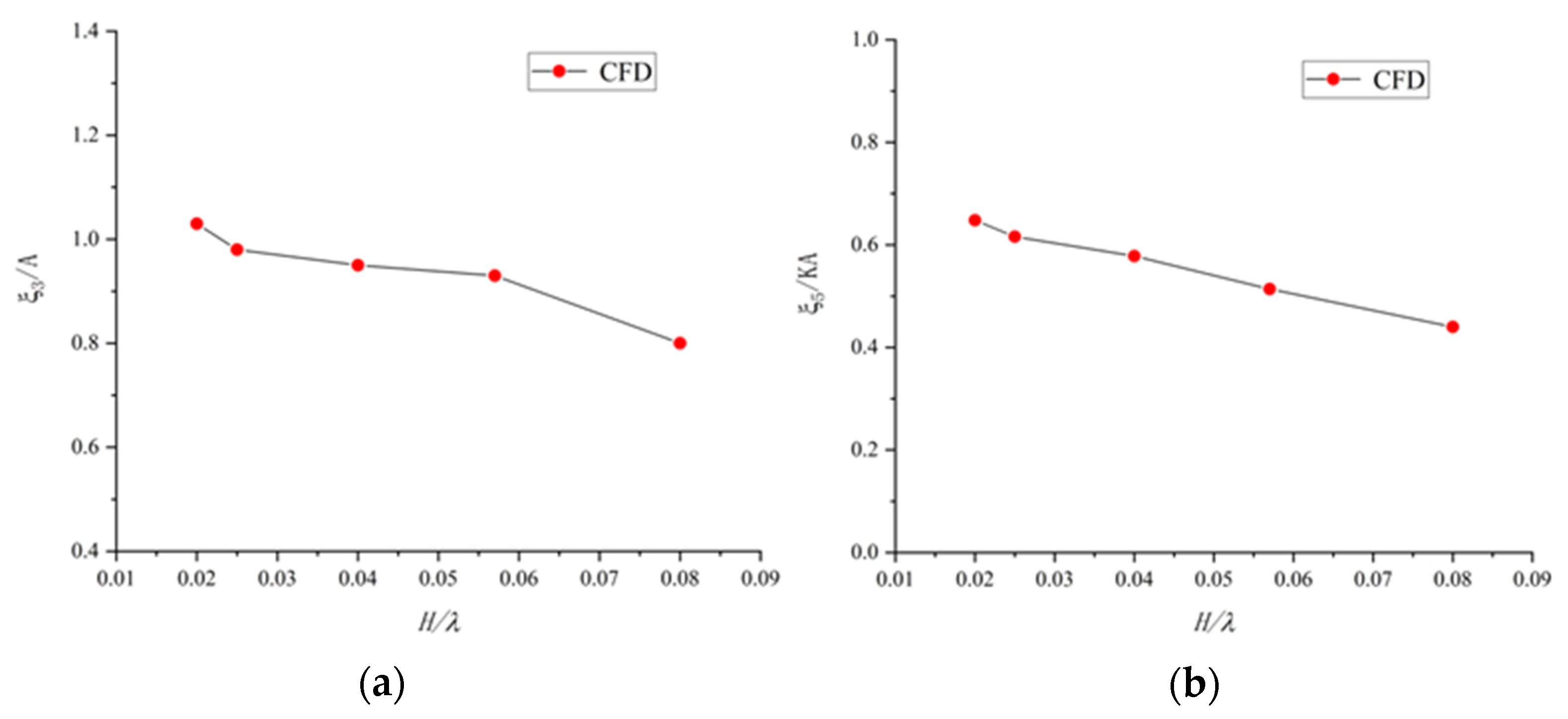
3.4. Numerical Simulation of Yukun
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| wave amplitude | |
| model breadth | |
| block coefficient | |
| model depth | |
| Froude number | |
| wave frequency | |
| encounter frequency | |
| gravity constant (9.8 m/s2) | |
| wave height | |
| heave transfer function | |
| wave number () | |
| radius of inertia for pitch | |
| model length | |
| longitudinal center of gravity | |
| pitch transfer function | |
| Reynolds number | |
| time | |
| model Draft | |
| encounter period | |
| service speed(knots) | |
| vertical center of gravity | |
| volume fraction of two-phase flow | |
| angle of encounter wave | |
| Displacement | |
| wavelength | |
| wave circular frequency | |
| dynamic viscosity | |
| heave amplitude | |
| pitch amplitude |
References
- Bai, W.; Ren, J.; Li, T. Modified Genetic Optimization-Based Locally Weighted Learning Identification Modeling of Ship Maneuvering with Full Scale Trial. Future Gener. Comput. Syst. 2019, 93, 1036–1045. [Google Scholar] [CrossRef]
- Ren, J.; Yang, Y.; Du, J. Modeling and simulation of the motions of hydrofoil catamaran in wave. J. Dalian Marit. Univ. 2004, 30, 4–7. [Google Scholar] [CrossRef]
- Zhang, X.; Yin, Y.; Jin, Y. Ship motion mathematical model with six degrees of freedom in regular wave. J. Traffic Transp. Eng. 2007, 7, 40–43. [Google Scholar]
- Zhang, T.; Ren, J.S.; Zhang, X.F.; Mei, T.L. Evaluation of a ship, s Froude-Krylov forces Using analytical integration in regular waves. J. Tianjin Univ. 2020, 53, 35–42. [Google Scholar]
- Carrica, P.M.; Wilson, R.V.; Noack, R.W.; Stern, F. Ship motions using single-phase level set with dynamic overset grids. Comput. Fluids 2007, 36, 1415–1433. [Google Scholar] [CrossRef]
- Kim, M.; Hizir, O.; Turan, O.; Incecik, A. Numerical Studies on Added Resistance and Motions of KVLCC2 in Head Seas for Various Ship Speeds. Ocean. Eng. 2017, 140, 466–476. [Google Scholar] [CrossRef]
- Kim, M.; Hizir, O.; Turan, O.; Incecik, A. Numerical Investigation on Added Resistance with Wave Steepness for KVLCC2 in Short and Long Waves. In Proceedings of the International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; pp. 753–760. [Google Scholar]
- Carrica, P.M.; Wilson, R.V.; Stern, F. Single-Phase Level Set Method for Unsteady Viscous Free Surface Flows. Int. J. Numer. Methods Fluids 2007, 53, 229–256. [Google Scholar] [CrossRef]
- Muscari, R.; Felli, M.; Di Mascio, A. Analysis of the Flow Past a Fully Appended Hull with Propellers by Computational and Experimental Fluid Dynamics. J. Fluids Eng. Trans. ASME 2011, 133, 1–16. [Google Scholar] [CrossRef]
- Gaggero, S.; Villa, D.; Viviani, M. An Extensive Analysis of Numerical Ship Self-Propulsion Prediction via a Coupled BEM/RANS Approach. Appl. Ocean. Res. 2017, 66, 55–78. [Google Scholar] [CrossRef]
- Shen, Z.; Wan, D.; Carrica, P.M. Dynamic Overset Grids in OpenFOAM with Application to KCS Self-Propulsion and Maneuvering. Ocean. Eng. 2015, 108, 287–306. [Google Scholar] [CrossRef]
- Shen, Z.R.; Ye, H.X.; Wan, D.C. Motion Response and Added Resistance of Ship in Head Waves Based on RANS Simulations. Chin. J. Hydrodyn. Ser. 2012, 27, 621–633. [Google Scholar] [CrossRef]
- Xu, W.G.; Zhao, F.M.; He, S.L. Research on calculation method for ship motion based on dynamic overset approach. J. Ship Mech. 2016, 20, 824–832. [Google Scholar]
- Can, Y.; Zhu, R.C.; Jiang, Y.; Hong, L. CFD verification and analysis of added resistance and motions of KVLCC2 in head waves. J. Harbin Eng. Univ. 2017, 38, 1828–1835. [Google Scholar]
- Wang, Z.; Li, T.; Jin, Q.; Guo, H.; Zhao, J.; Qi, J. Fast Multigrid Algorithm for Non-Linear Simulation of Intact and Damaged Ship Motions in Waves. J. Mar. Sci. Eng. 2022, 10, 1101. [Google Scholar] [CrossRef]
- Jin, Q.; Hudson, D.; Temarel, P.; Price, W.G. Turbulence and Energy Dissipation Mechanisms in Steady Spilling Breaking Waves Induced by a Shallowly Submerged Hydrofoil. Ocean. Eng. 2021, 229, 108976. [Google Scholar] [CrossRef]
- ITTC. Practical Guidelines for Ship CFD Applications; ITTC—Recommended Procedures and Guidelines; ITTC: Singapore, 2011; pp. 1–8. [Google Scholar]
- Seo, M.G.; Yang, K.K.; Park, D.M.; Kim, Y. Numerical Analysis of Added Resistance on Ships in Short Waves. Ocean. Eng. 2014, 87, 97–110. [Google Scholar] [CrossRef]
- Lee, J.H.; Seo, M.G.; Park, D.M.; Yang, K.K.; Kim, K.H.; Kim, Y. Study on the effects of hull form on added resistance. In Proceedings of the 12th International Symposium on Practical Design of Ships and Other Floating Structures, Changwon, Korea, 24 October 2013; pp. 329–337. [Google Scholar]
- Weymouth, G.D.; Wilson, R.V.; Stern, F. RANS Computational Fluid Dynamics Predictions of Pitch and Heave Ship Motions in Head Seas. J. Ship Res. 2005, 49, 80–97. [Google Scholar] [CrossRef]
- Lee, J.; Park, D.-M.; Kim, Y. Experimental Investigation on the Added Resistance of Modified KVLCC2 Hull Forms with Different Bow Shapes. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2017, 231, 395–410. [Google Scholar] [CrossRef]
- Zhang, T. Research on Time Domain Numerical Modeling and Simulation of Ship Motions in Waves. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2019. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particulars | Full Scale | Model Scale |
|---|---|---|
| (m) | 320 | 4 |
| B (m) | 58 | 0.725 |
| D (m) | 20.8 | 0.260 |
| (m3) | 312,622 | 0.6106 |
| LCG (%) | 3.48 | 3.48 |
| VOG(m) | 18.56 | 0.232 |
| CB | 0.8098 | 0.8098 |
| Particulars | Full Scale | Model Scale |
|---|---|---|
| (m) | 105 | 2.1 |
| B (m) | 18 | 0.36 |
| D (m) | 5.4 | 0.108 |
| (m3) | 5711 | 0.04569 |
| K (m) | 26.25 | 1.575 |
| CB | 0.5596 | 0.5596 |
| Case (No.) | Mesh | Mesh Number | ||
|---|---|---|---|---|
| CKC | Coarse | 0.8 million | 1/8 | 180 |
| CKB | Base | 2.1 million | 1/8 | 256 |
| CKF | Fine | 4.1 million | 1/8 | 340 |
| Case (No.) | V [Knots] | |||
|---|---|---|---|---|
| CK1 | 15.5 | 0.5 | 2.67 | 1/60 |
| CK2 | 15.5 | 0.75 | 4 | 1/60 |
| CKB | 15.5 | 1 | 5.33 | 1/60 |
| CK4 | 15.5 | 1.2 | 6.4 | 1/60 |
| CK5 | 15.5 | 1.4 | 6.4 | 1/60 |
| CK6 | 12 | 0.75 | 4 | 1/60 |
| CK7 | 12 | 1 | 5.33 | 1/60 |
| CK8 | 12 | 1.2 | 6.4 | 1/60 |
| CK9 | 12 | 1.4 | 7.47 | 1/60 |
| CK10 | 0 | 0.75 | 4 | 1/60 |
| CK11 | 0 | 1 | 5.33 | 1/60 |
| CK12 | 0 | 1.2 | 6.4 | 1/60 |
| CK13 | 0 | 1.4 | 7.47 | 1/60 |
| CK14 | 15.5 | 1.2 | 2.56 | 1/150 |
| CK15 | 15.5 | 1.2 | 3.84 | 1/100 |
| CK16 | 15.5 | 1.2 | 4.8 | 1/80 |
| CK17 | 15.5 | 1.2 | 6.4 | 1/60 |
| CK18 | 15.5 | 1.2 | 7.68 | 1/50 |
| Case (No.) | Mesh | Mesh Number | ||
|---|---|---|---|---|
| CYC | Coarse | 0.96 million | 1/8 | 180 |
| CYB | Base | 4.1 million | 1/8 | 256 |
| CYF | Fine | 5.98 million | 1/8 | 340 |
| Case (No.) | V [knots] | Wave Angle [°] | |||
|---|---|---|---|---|---|
| CY1 | 16.7 | 0 | 1 | 0.12 | 2/35 |
| CY2 | 16.7 | 45 | 1 | 0.12 | 2/35 |
| CY3 | 16.7 | 90 | 1 | 0.12 | 2/35 |
| CY4 | 16.7 | 135 | 1 | 0.12 | 2/35 |
| CY5 | 16.7 | 180 | 1 | 0.12 | 2/35 |
| CY6 | 16.7 | 135 | 1 | 0.042 | 2/100 |
| CY7 | 16.7 | 135 | 1 | 0.0525 | 2/80 |
| CY8 | 16.7 | 135 | 1 | 0.084 | 2/50 |
| CY9 | 16.7 | 135 | 1 | 0.168 | 2/25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Li, T.; Ren, J.; Jin, Q.; Zhou, W. URANS Calculation of Ship Heave and Pitch Motions in Marine Simulator Based on Overset Mesh. J. Mar. Sci. Eng. 2022, 10, 1374. https://doi.org/10.3390/jmse10101374
Wang Z, Li T, Ren J, Jin Q, Zhou W. URANS Calculation of Ship Heave and Pitch Motions in Marine Simulator Based on Overset Mesh. Journal of Marine Science and Engineering. 2022; 10(10):1374. https://doi.org/10.3390/jmse10101374
Chicago/Turabian StyleWang, Ziping, Tingqiu Li, Junsheng Ren, Qiu Jin, and Wenjun Zhou. 2022. "URANS Calculation of Ship Heave and Pitch Motions in Marine Simulator Based on Overset Mesh" Journal of Marine Science and Engineering 10, no. 10: 1374. https://doi.org/10.3390/jmse10101374
APA StyleWang, Z., Li, T., Ren, J., Jin, Q., & Zhou, W. (2022). URANS Calculation of Ship Heave and Pitch Motions in Marine Simulator Based on Overset Mesh. Journal of Marine Science and Engineering, 10(10), 1374. https://doi.org/10.3390/jmse10101374