
Convolution Neural Network for the Prediction of Cochlodinium polykrikoides Bloom in the South Sea of Korea



Abstract
:1. Introduction
2. Data and Methods
2.1. C. polykrikoides Bloom Data
2.2. Meteorological Data
2.3. Oceanographic Data
2.4. Model Structure and Training
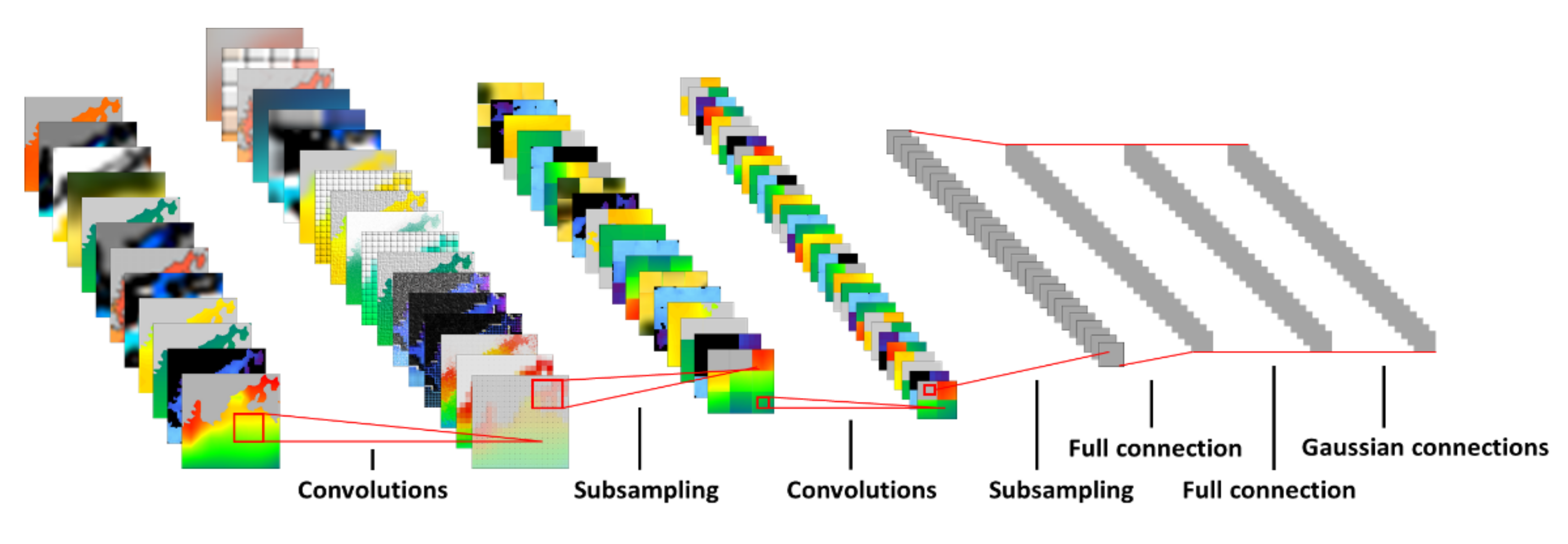
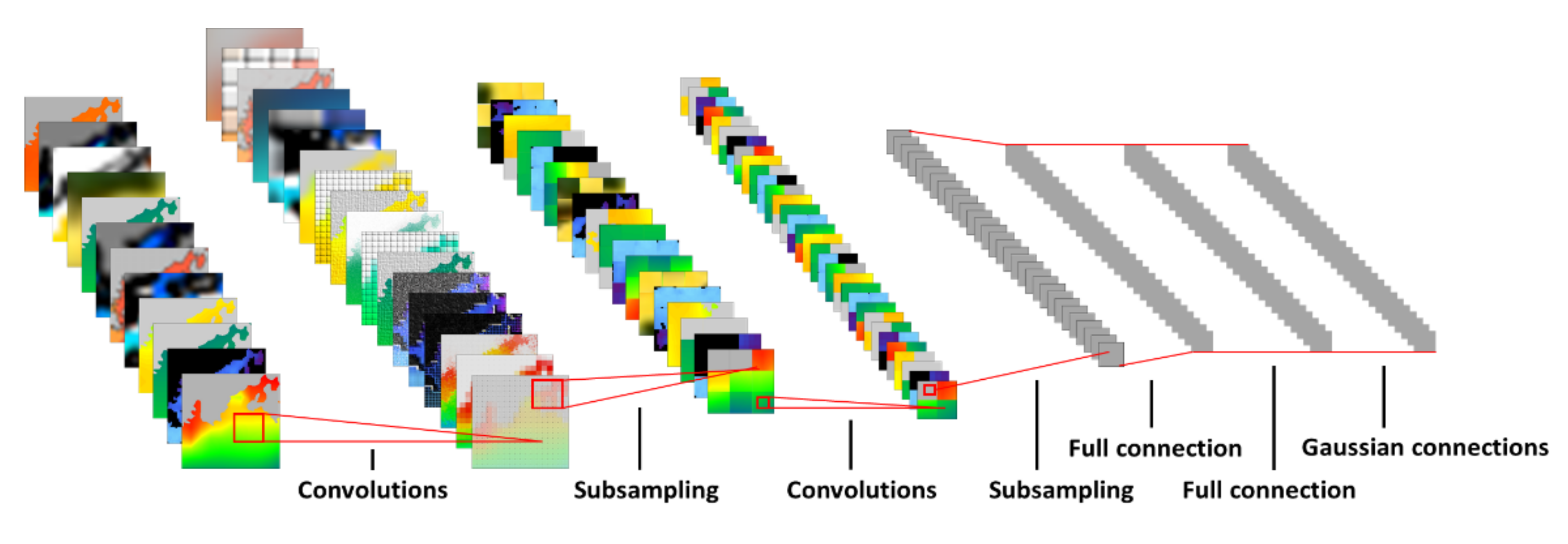
2.4.1. Convolution Neural Network
2.4.2. Model Structure
2.4.3. Training and Test Period
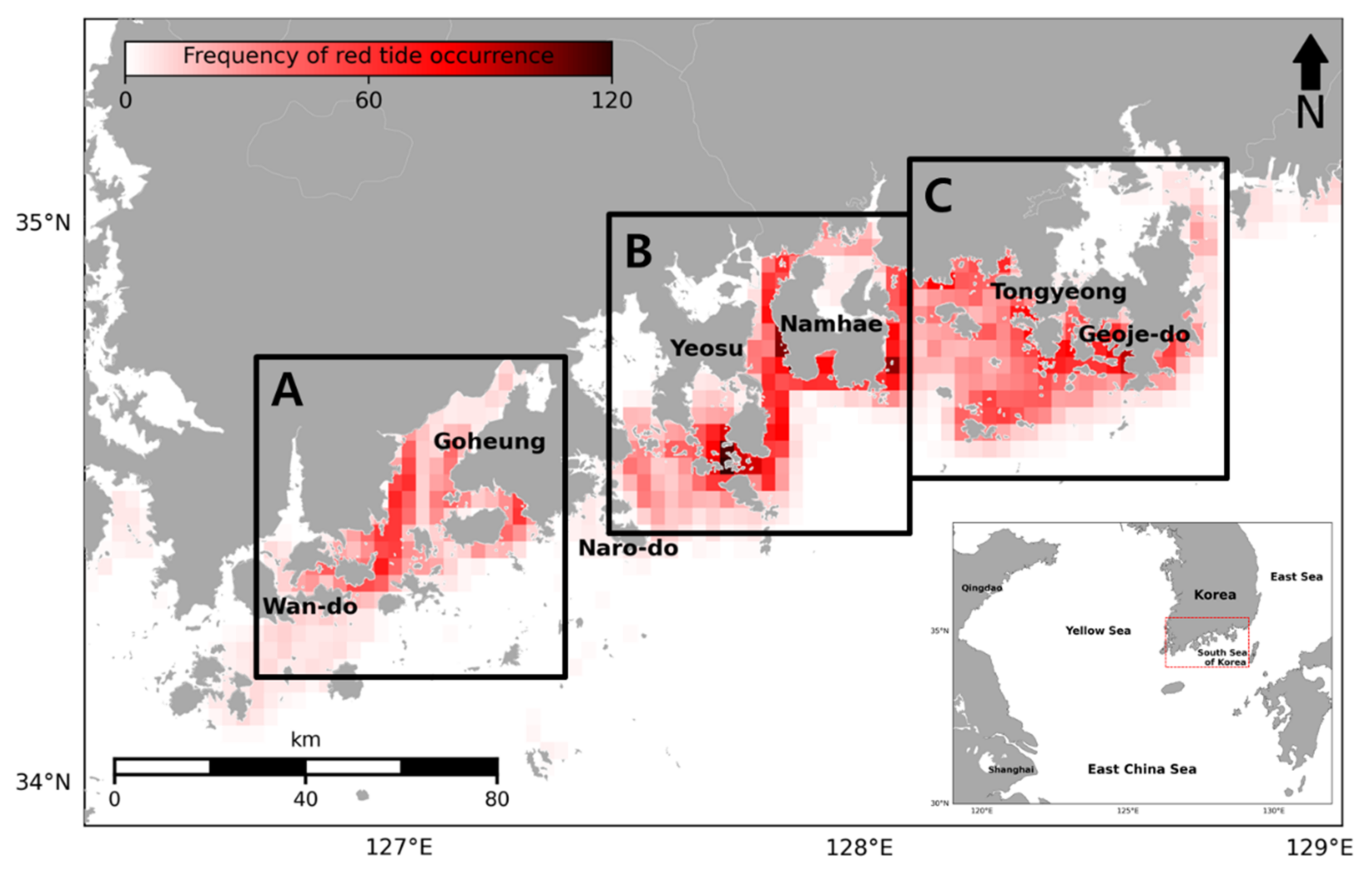
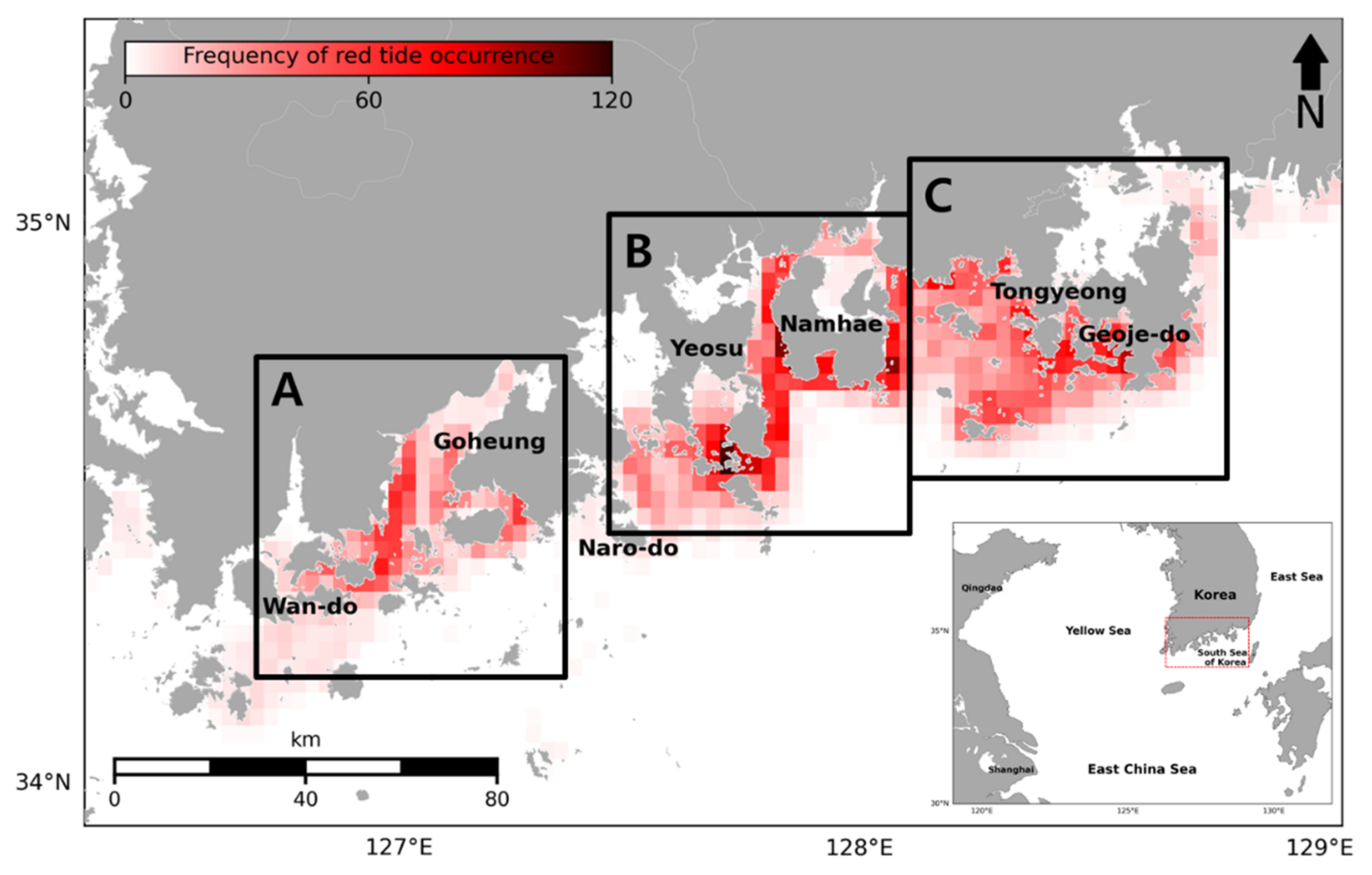
2.4.4. Model Domain and Information
2.4.5. Network Architecture
3. Results
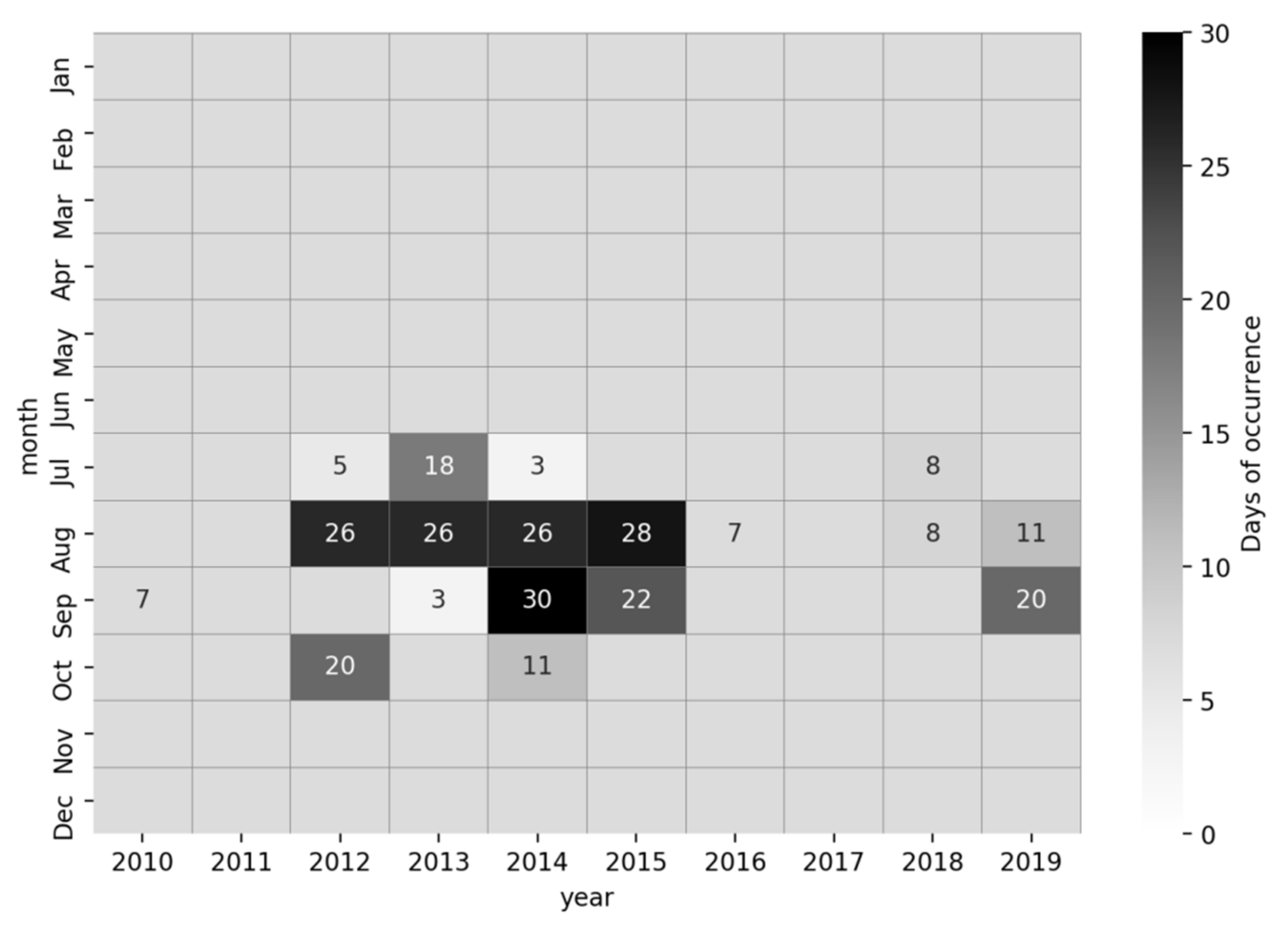
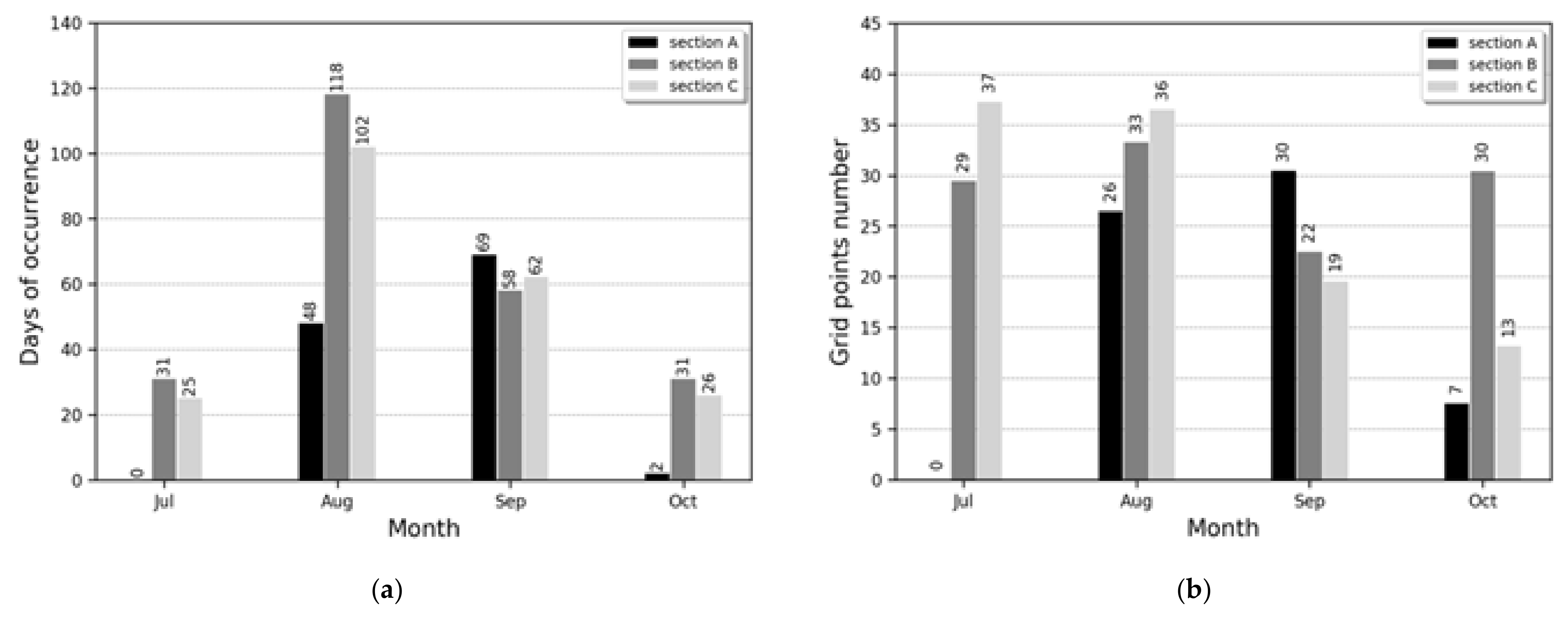
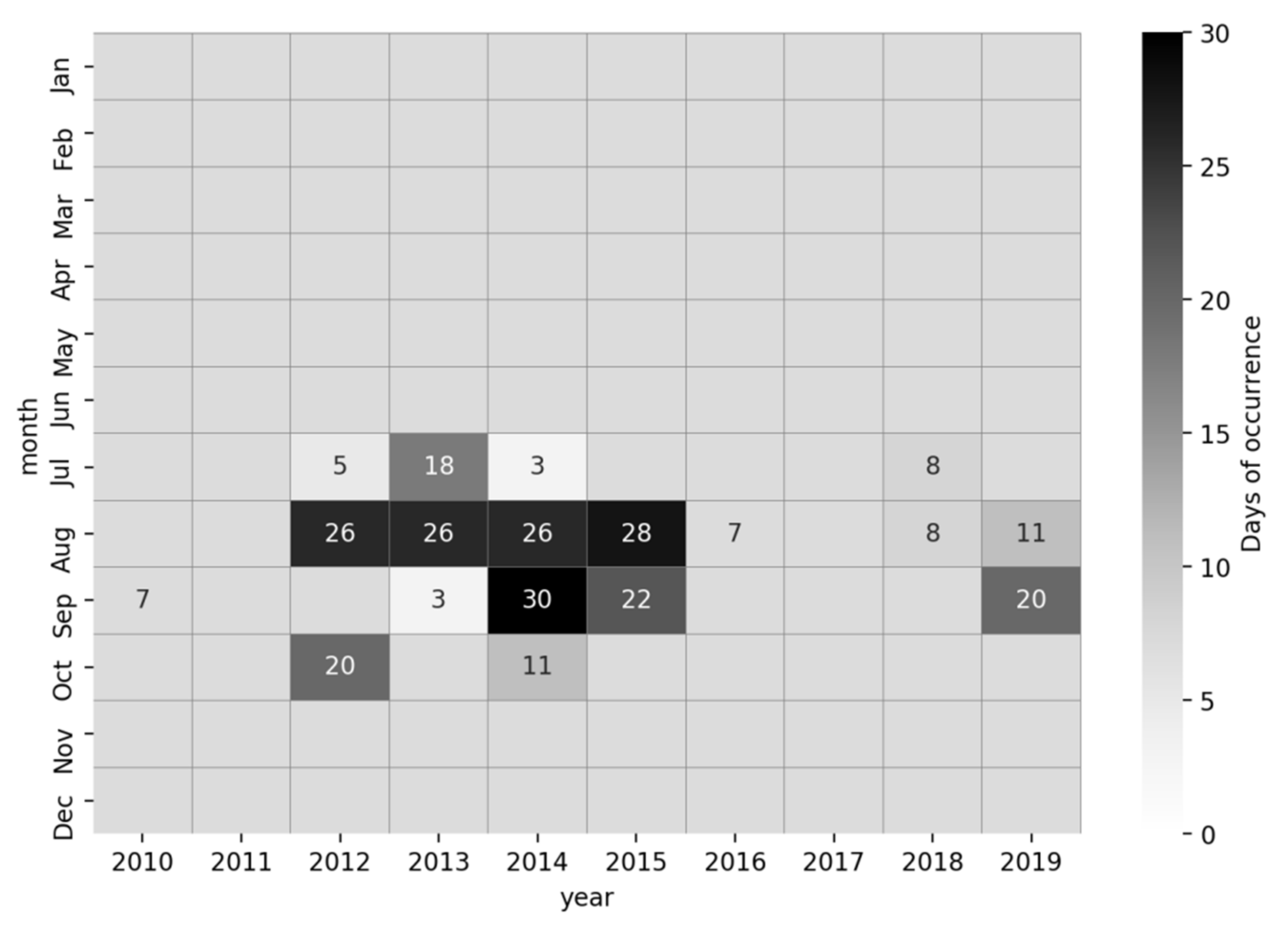
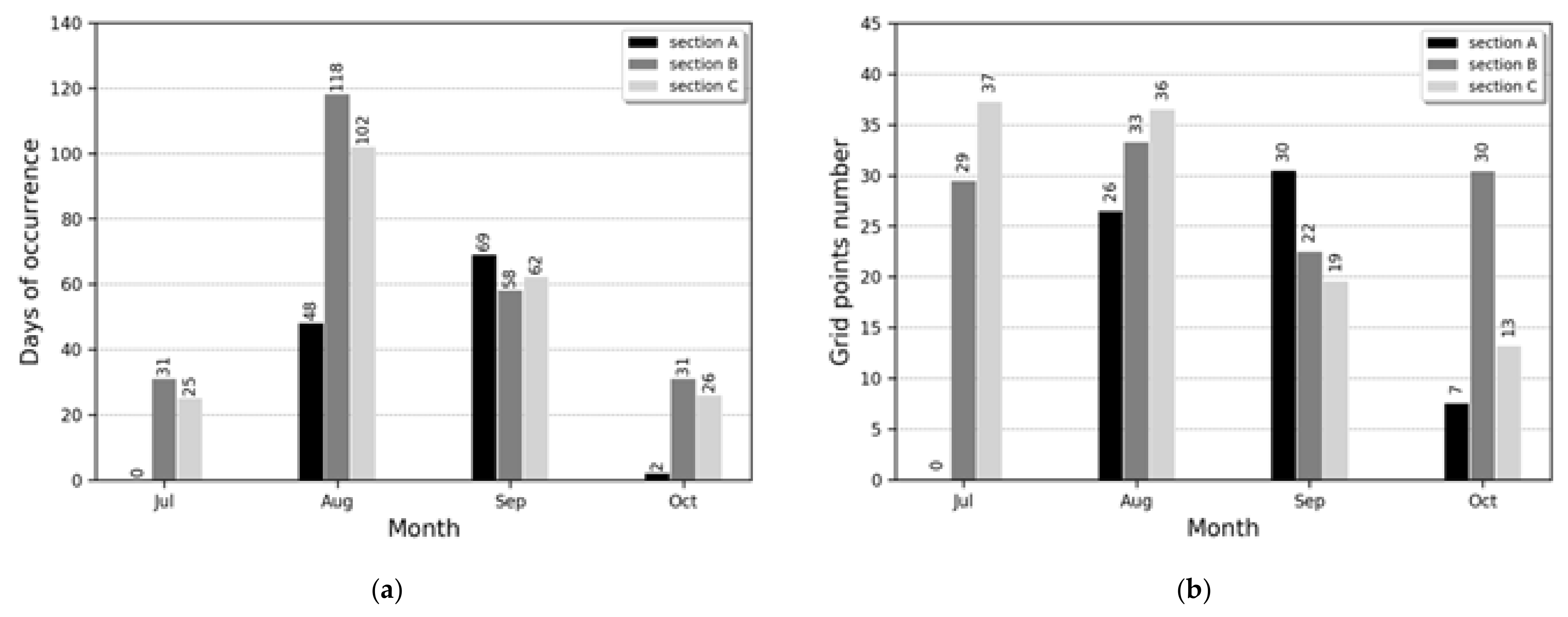
3.1. HABs Occurrence Status
3.2. CONV2D Forecasting of HABs for the Three Domains
4. Summary and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Kim, H.G. Harmful Algal Blooms in the Sea; Dasom Publishing, Co.: Seoul, Korea, 2015; p. 467. [Google Scholar]
- Kang, Y.S.; Kim, H.G.; Lim, W.E.; Lee, C.K. An unusual coastal environment and Cochlodinium polykrikoides blooms in 1995 in the South Sea of Korea. J. Korean Soc. Oceanogr. 2002, 37, 212–223. [Google Scholar]
- Suh, Y.S.; Jang, L.H.; Lee, N.K.; Ishizaka, J. Feasibility of red tide detection around Korea waters using satellite remote sensing. Fish. Aquat. Sci. 2004, 7, 148–162. [Google Scholar] [CrossRef] [Green Version]
- Gómez, F.; Richlen, M.L.; Anderson, D.M. Molecular characterization and morphology of Cochlodinium strangulatum, the type species of Cochlodinium, and Margalefidinium gen. nov. for C. polykrikoides and allied species (Gymnodiniales, Dinophyceae). Harmful Algae 2017, 63, 32–44. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.G.; Kim, H.G.; Bae, H.M.; Kang, Y.S.; Jeong, C.S.; Lee, C.K.; Kim, S.Y.; Kim, C.S.; Lim, W.A.; Cho, U.S. Handbook of Harmful Marine Algal Blooms in Korean Waters; National Fisheries Research and Development Institute: Gangwon-do, Korea, 2002; p. 172. [Google Scholar]
- Stumpf, R.P.; Arnone, R.A.; Gould, R.W.; Martinolich, P.M.; Ransibrahmankul, V. A partially coupled ocean-atmosphere model for retrieval of water-leaving radiance from SeaWiFS in coastal waters. SeaWiFS Postlaunch Tech. Rep. Ser. 2003, 22, 51–59. [Google Scholar]
- Ahn, Y.H.; Shanmugam, P. Detecting the red tide algal blooms from satellite ocean color observations in optical complex Northeast-Asia coastal waters. Remote Sens. Environ. 2006, 103, 419–437. [Google Scholar] [CrossRef]
- Son, Y.B.; Ishizaka, J.; Jeong, J.C.; Kim, H.C.; Lee, T. Cochlodinium polykrikoides red tide detection in the south sea of Korea using spectral classification of MODIS data. Ocean Sci. J. 2011, 46, 239–263. [Google Scholar] [CrossRef]
- Lee, S.M.; Lee, D.H. Improved prediction of harmful algal blooms in four Major South Korea’s Rivers using deep learning models. Int. J. Environ. Res. Public Health 2018, 15, 1322. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Wang, Y.; Cao, M.; Sun, X.; Du, Z.; Liu, R.; Ye, X. Deep-learning-based approach for prediction of algal blooms. Sustainability 2016, 8, 1060. [Google Scholar] [CrossRef] [Green Version]
- Daghighi, A. Harmful Algae Bloom Prediction Model for Western Lake Erie Using Stepwise Multiple Regression and Genetic Programming. Bachelor’s Thesis, University of Tehran, Tehran, Iran, 19 February 2015. [Google Scholar] [CrossRef]
- Derot, J.; Yajima, H.; Jacquet, S. Advances in forecasting harmful algal blooms using machine learning models: A case study with Planktothrix rubescens in Lake Geneva. Harmful Algae 2020, 99, 101906. [Google Scholar] [CrossRef]
- Bak, S.H.; Kim, H.M.; Kim, B.K.; Hwang, D.H.; Unuzaya, E.; Yoon, H.J. Study on detection technique for Cochlodinium polykrikoides red tide using logistic regression model and decision tree model. J. Korea Inst. Electron. Commun. Sci. 2018, 13, 777–786. [Google Scholar] [CrossRef]
- Bak, S.H.; Jeong, M.J.; Hwang, D.H.; Enkhjargal, U.; Yoon, H.J. Study on Cochlodinium polykrikoides red tide prediction using deep neural network under imbalanced data. J. Korea Inst. Electron. Commun. Sci. 2019, 14, 1161–1170. [Google Scholar] [CrossRef]
- Shin, J.; Kim, S.M.; Son, Y.B.; Kim, K.; Ryu, J.H. Early prediction of Margalefidinium polykrikoides bloom using a LSTM neural network model in the south sea of Korea. J. Coast. Res. 2019, 90, 236–242. [Google Scholar] [CrossRef]
- Kim, S.M.; Shin, J.; Baek, S.; Ryu, J.H. U-Net convolutional neural network model for deep red tide learning using GOCI. J. Coast. Res. 2019, 90, 302–309. [Google Scholar] [CrossRef]
- Shin, J.; Min, J.E.; Ryu, J.H. A study on red tide surveillance system around the Korean coastal waters using GOCI. Korean J. Remote Sens. 2017, 33, 213–230. [Google Scholar] [CrossRef]
- Lee, M.O.; Lee, S.H.; Kim, P.J.; Kim, B.K. Characteristics of water masses and its distributions in the southern coastal waters of Korea in summer. J. Korean Soc. Mar. Environ. Energy 2018, 21, 76–96. [Google Scholar] [CrossRef]
- Gobler, C.J.; Berry, D.L.; Anderson, O.R.; Burson, A.; Koch, F.; Rodgers, B.S.; Moore, L.K.; Goleski, J.A.; Allam, B.; Bowser, P.; et al. Characterization, dynamics, and ecological impacts of harmful Cochlodinium polykrikoides blooms on eastern Long Island, NY, USA. Harmful Algae 2008, 7, 293–307. [Google Scholar] [CrossRef]
- Kudela, R.M.; Ryan, J.P.; Blakely, M.D.; Lane, J.Q.; Peterson, T.D. Linking the physiology and ecology of Cochlodinium to better understand harmful algal bloom events: A comparative approach. Harmful Algae 2008, 7, 278–292. [Google Scholar] [CrossRef]
- Mulholland, M.R.; Morse, R.E.; Boneillo, G.E.; Bernhardt, P.W.; Filippino, K.C.; Procise, L.A.; Blanco-Garcia, J.L.; Marshall, H.G.; Egerton, T.A.; Hunley, W.S.; et al. Understanding causes and impacts of the dinoflagellate, Cochlodinium polykrikoides, blooms in the Chesapeake Bay. Estuar. Coast. 2009, 32, 734–747. [Google Scholar] [CrossRef]
- Fatemi, S.M.R.; Nabavi, S.M.B.; Vosoghi, G.; Fallahi, M.; Mohammadi, M. The relation between environmental parameters of Hormuzgan coastline in Persian Gulf and occurrence of the first harmful algal bloom of Cochlodinium polykrikoides (Gymnodiniaceae). Iran. J. Fish. Sci. 2012, 11, 475–489. [Google Scholar]
- Kudela, R.M.; Gobler, C.J. Harmful dinoflagellate blooms caused by Cochlodinium sp.: Global expansion and ecological strategies facilitating bloom formation. Harmful Algae 2012, 14, 71–86. [Google Scholar] [CrossRef]
- Al-Azri, A.R.; Piontkovski, S.A.; Al-Hashimi, K.A.; Goes, J.I.; Gomes, H.R.; Glibert, P.M. Mesoscale and nutrient conditions associated with the massive 2008 Cochlodinium polykrikoides bloom in the Sea of Oman/Arabian Gulf. Estuar. Coast. 2013, 37, 325–338. [Google Scholar] [CrossRef] [Green Version]
- Zuo, X.; Zhou, X.; Guo, D.; Li, S.; Liu, S.; Xu, C. Ocean Temperature Prediction Based on Stereo Spatial and Temporal 4-D Convolution Model. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1003405. [Google Scholar] [CrossRef]
- Choi, H.; Park, M.; Son, G.; Jeong, J.; Park, J.; Mo, K.; Kang, P. Real-time significant wave height estimation from raw ocean images based on 2D and 3D deep neural networks. Ocean. Eng. 2020, 201, 107129. [Google Scholar] [CrossRef]
- Segal-Rozenhaimer, M.; Li, A.; Das, K.; Chirayath, V. Cloud detection algorithm for multi-modal satellite imagery using convolutional neural-networks (CNN). Remote Sens. Environ. 2020, 237, 111446. [Google Scholar] [CrossRef]
- Schmid, M.S.; Cowen, R.K.; Robinson, K.; Luo, J.Y.; Briseño-Avena, C.; Sponaugle, S. Prey and predator overlap at the edge of a mesoscale eddy: Fine-scale, in-situ distributions to inform our understanding of oceanographic processes. Sci. Rep. 2020, 10, 921. [Google Scholar] [CrossRef] [Green Version]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2279–2324. [Google Scholar] [CrossRef] [Green Version]
- Jeong, Y.; Kim, M.; Cho, A.; Yoon, S.; Park, Y.; Son, M.; Choi, H.; Cho, H. The western waters of the South Sea in 2013–2014, characteristics of Cochlodinium polykrikoides. Proc. Korean Soc. Mar. Environ. Energy 2016, 11, 162–163. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Surveillance Area | Surveying Periods | Organization in Charge |
|---|---|---|---|
| Vessel surveillance | 102 stations | March to November (one to two times per month) | NIFS |
| Land surveillance | 130 stations | April to October (two times per week) | Fisheries technology offices |
| Aerial surveillance | Area where HABs occurs | On-demand | Korea Coast Guard |
| Number | Level | Valid Time | Parameter | Description |
|---|---|---|---|---|
| 435 | 2 m above ground | 3h forecast | TMP | Temperature (K) |
| 438 | 2 m above ground | 3h forecast | RH | Relative Humidity (%) |
| 442 | 10 m above ground | 3h forecast | UGRD | U-Component of Winds (m/s) |
| 443 | 10 m above ground | 3h forecast | VGRD | V-Component of Winds (m/s) |
| 446 | Surface | 3h forecast | PRATE | Precipitation Rate (km/m2/s) |
| 462 | Surface | 0–3 h average | LHTFL | Latent Heat Net Flux (W/m2) |
| 463 | Surface | 0–3 h average | SHFTL | Sensible Heat Net Flux (W/m2) |
| 465 | Surface | 0–3 h average | UFLX | Momentum Flux, U-Component (N/M2) |
| 466 | Surface | 0–3 h average | VFLX | Momentum Flux, V-Component (N/M2) |
| 497 | Surface | 0–3 h average | DSWRF | Downward Short-Wave Radiation Flux(W/m2) |
| 498 | Surface | 0–3 h average | DLWRF | Downward Long-Wave Radiation Flux (W/m2) |
| 499 | Surface | 0–3 h average | USWRF | Upward Short-Wave Radiation Flux (W/m2) |
| 500 | Surface | 0–3 h average | ULWRF | Upward Long-Wave Radiation Flux (W/m2) |
| Domain | Layer | Iterations (times) | ||||||
|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 150 | 200 | 250 | 300 | |||
| A | 1 | Loss | 0.0159 | 0.0152 | 0.0144 | 0.0147 | 0.0146 | 0.0133 |
| Accuracy | 0.9812 | 0.9811 | 0.9818 | 0.9825 | 0.9825 | 0.9837 | ||
| 2 | Loss | 0.0157 | 0.0147 | 0.0140 | 0.0131 | 0.0129 | 0.0126 | |
| Accuracy | 0.9813 | 0.9823 | 0.9828 | 0.9844 | 0.9843 | 0.9846 | ||
| 3 | Loss | 0.0164 | 0.0146 | 0.0146 | 0.0137 | 0.0132 | 0.0125 | |
| Accuracy | 0.9803 | 0.9818 | 0.9818 | 0.9833 | 0.9842 | 0.9852 | ||
| B | 1 | Loss | 0.0405 | 0.0386 | 0.0370 | 0.0352 | 0.0342 | 0.0340 |
| Accuracy | 0.9484 | 0.9515 | 0.9541 | 0.9569 | 0.9572 | 0.9568 | ||
| 2 | Loss | 0.0387 | 0.0347 | 0.0321 | 0.0310 | 0.0281 | 0.0298 | |
| Accuracy | 0.9505 | 0.9564 | 0.9598 | 0.9614 | 0.9661 | 0.9634 | ||
| 3 | Loss | 0.0394 | 0.0345 | 0.0304 | 0.0286 | 0.0293 | 0.0271 | |
| Accuracy | 0.9498 | 0.9566 | 0.9628 | 0.9649 | 0.9628 | 0.9669 | ||
| C | 1 | Loss | 0.0351 | 0.0330 | 0.0310 | 0.0306 | 0.0295 | 0.0288 |
| Accuracy | 0.9577 | 0.9600 | 0.9629 | 0.9628 | 0.9650 | 0.9660 | ||
| 2 | Loss | 0.0341 | 0.0313 | 0.0284 | 0.0267 | 0.0256 | 0.0252 | |
| Accuracy | 0.9596 | 0.9624 | 0.9662 | 0.9685 | 0.9713 | 0.9707 | ||
| 3 | Loss | 0.0352 | 0.0313 | 0.0299 | 0.0264 | 0.0254 | 0.0250 | |
| Accuracy | 0.9582 | 0.9634 | 0.9657 | 0.9686 | 0.9716 | 0.9716 | ||
| Domain | Pixel Accuracy | Mean Accuracy | Mean IU | Frequency Weighted IU |
|---|---|---|---|---|
| A | 97.78 | 88.57 | 83.59 | 96.63 |
| B | 94.61 | 86.19 | 79.72 | 91.95 |
| C | 96.98 | 80.06 | 74.63 | 95.31 |
| Total | 96.46 | 84.94 | 79.31 | 94.63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, Y.; Park, Y.; Lim, W.-A.; Min, S.-H.; Lee, J.-S. Convolution Neural Network for the Prediction of Cochlodinium polykrikoides Bloom in the South Sea of Korea. J. Mar. Sci. Eng. 2022, 10, 31. https://doi.org/10.3390/jmse10010031
Choi Y, Park Y, Lim W-A, Min S-H, Lee J-S. Convolution Neural Network for the Prediction of Cochlodinium polykrikoides Bloom in the South Sea of Korea. Journal of Marine Science and Engineering. 2022; 10(1):31. https://doi.org/10.3390/jmse10010031
Chicago/Turabian StyleChoi, Youngjin, Youngmin Park, Weol-Ae Lim, Seung-Hwan Min, and Joon-Soo Lee. 2022. "Convolution Neural Network for the Prediction of Cochlodinium polykrikoides Bloom in the South Sea of Korea" Journal of Marine Science and Engineering 10, no. 1: 31. https://doi.org/10.3390/jmse10010031
APA StyleChoi, Y., Park, Y., Lim, W.-A., Min, S.-H., & Lee, J.-S. (2022). Convolution Neural Network for the Prediction of Cochlodinium polykrikoides Bloom in the South Sea of Korea. Journal of Marine Science and Engineering, 10(1), 31. https://doi.org/10.3390/jmse10010031