
An Efficient Ship Automatic Collision Avoidance Method Based on Modified Artificial Potential Field


Abstract
:1. Introduction
2. Collision Avoidance Based on Modified Artificial Potential Field
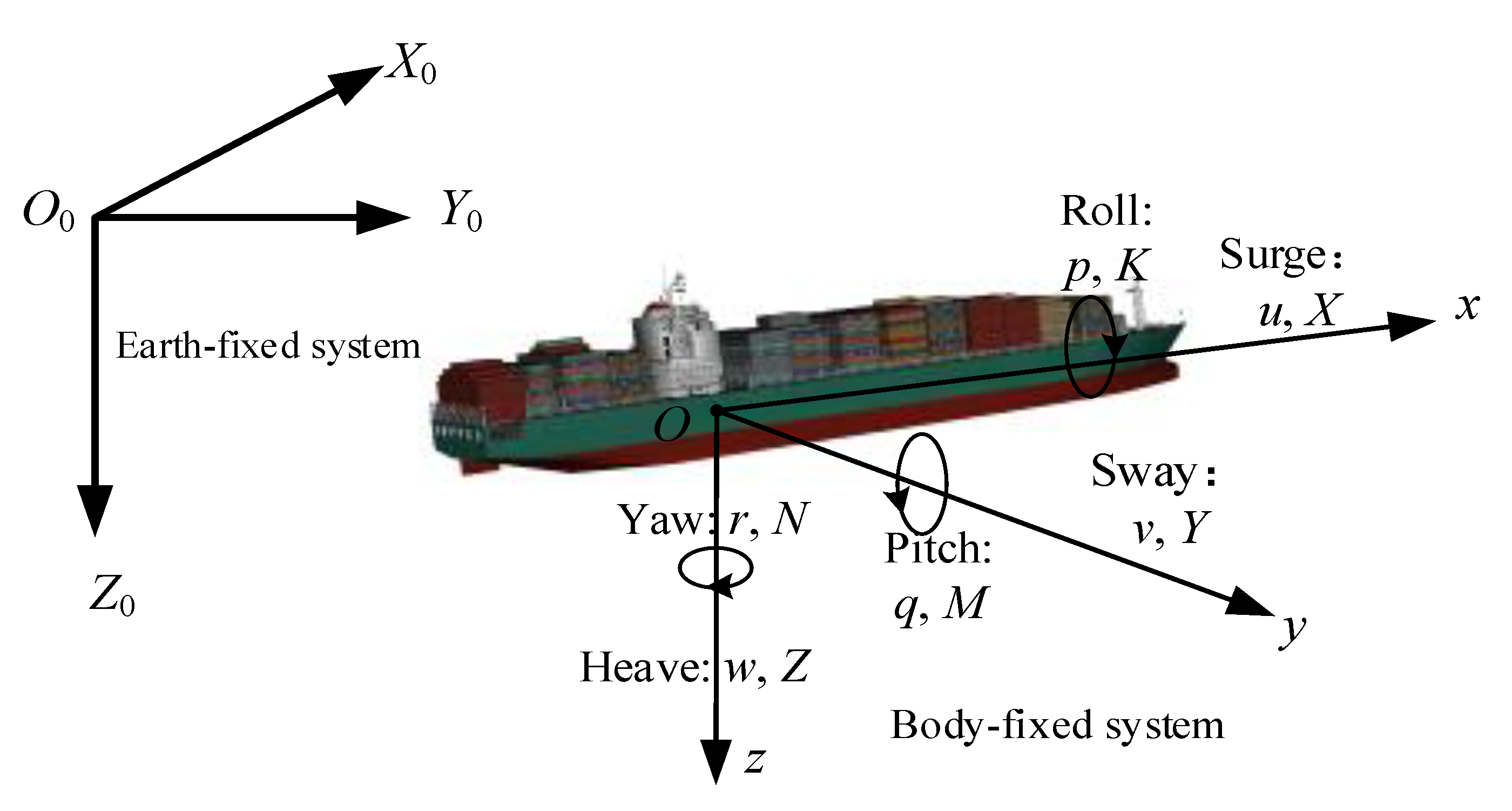
2.1. Modeling of Motions of MASS
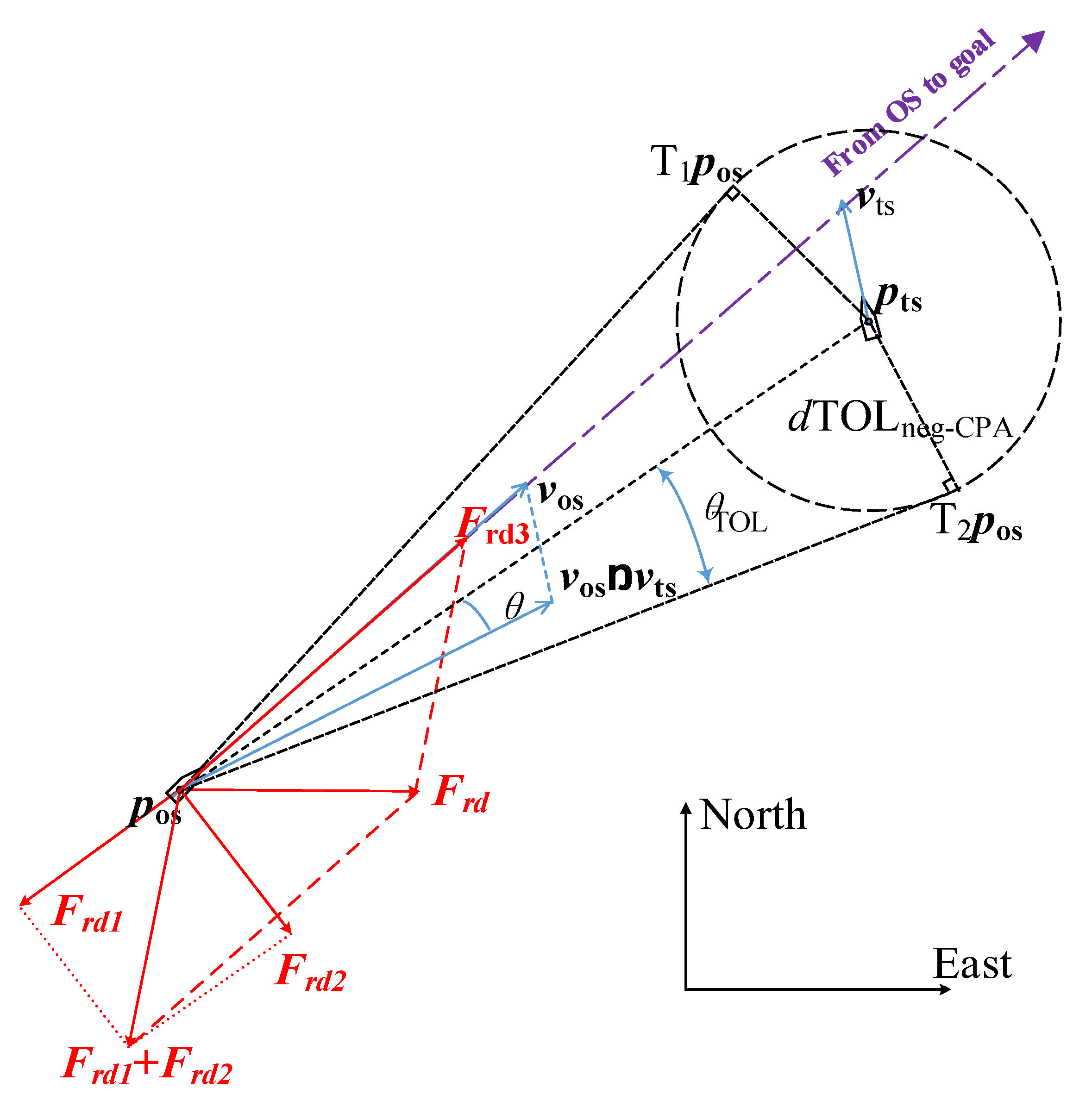
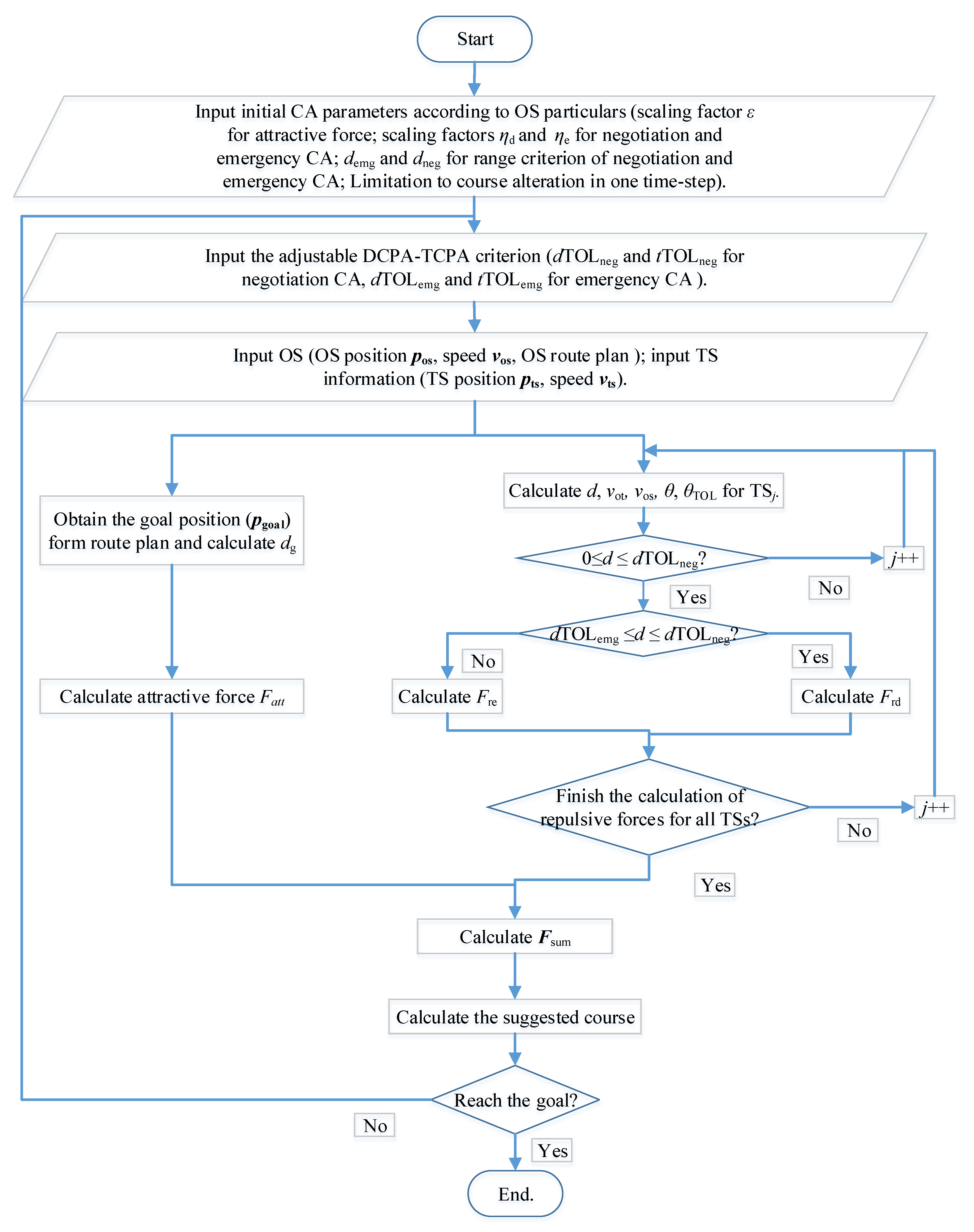
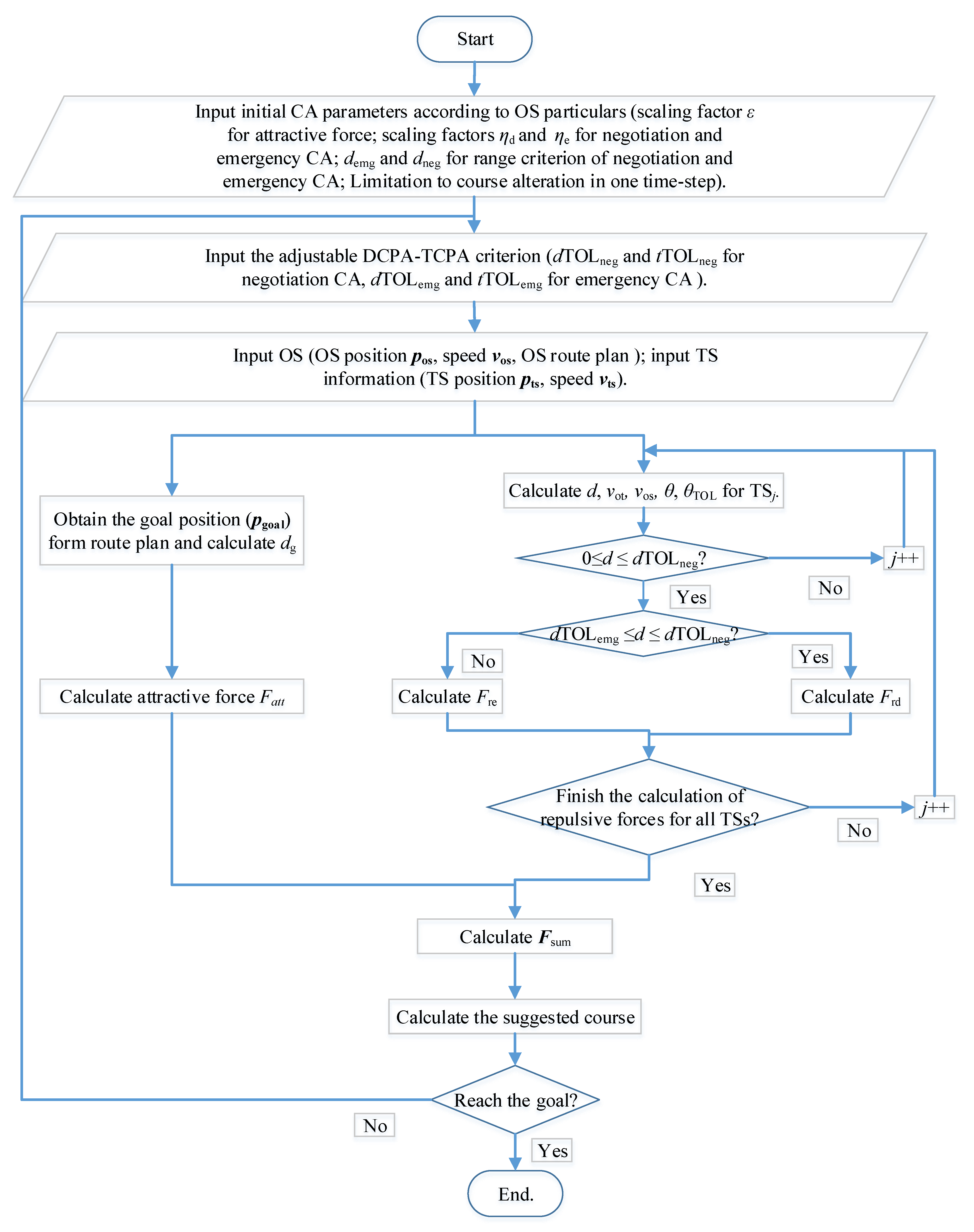
2.2. Modified APF Model
3. Tests and Results
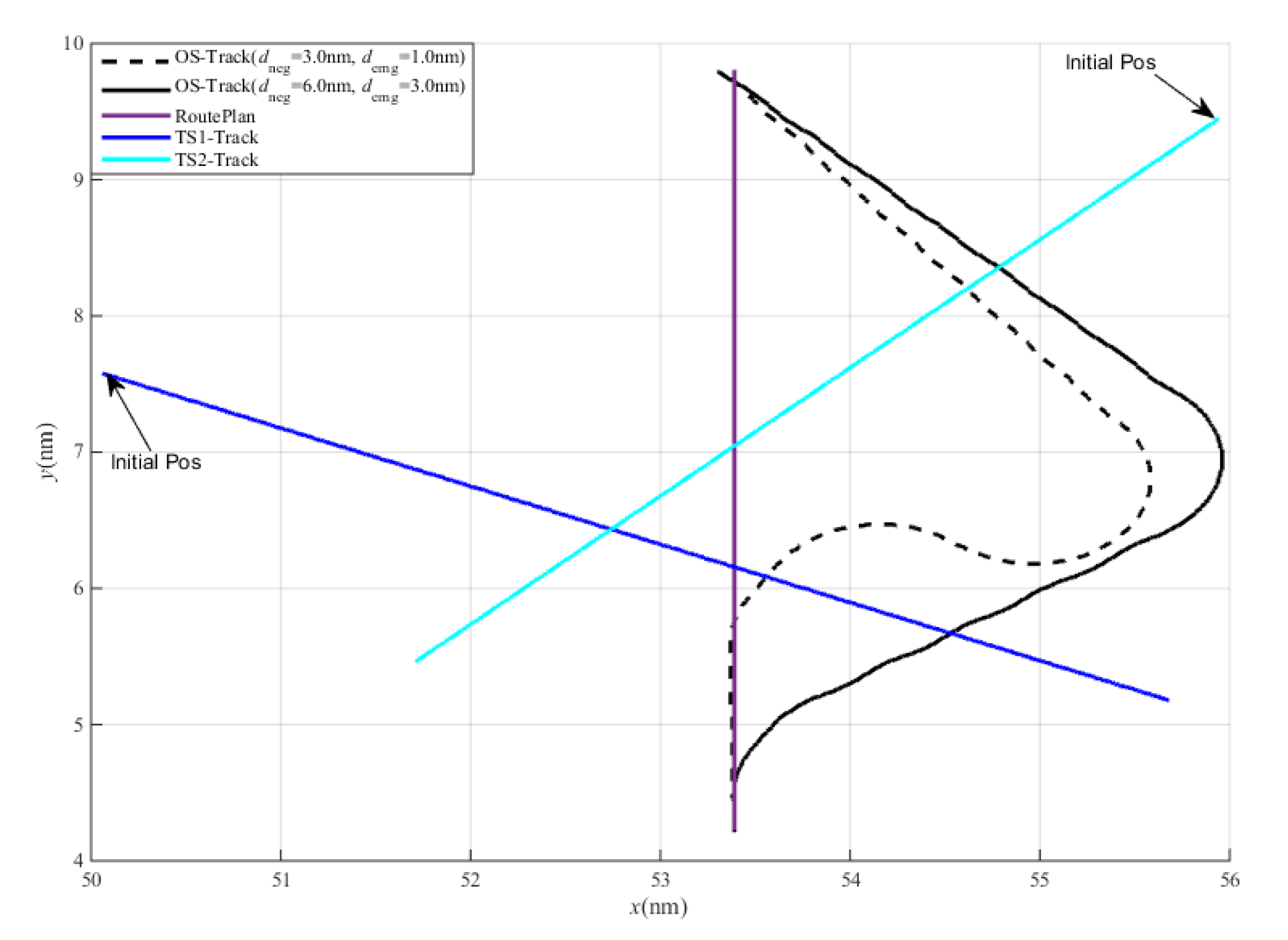
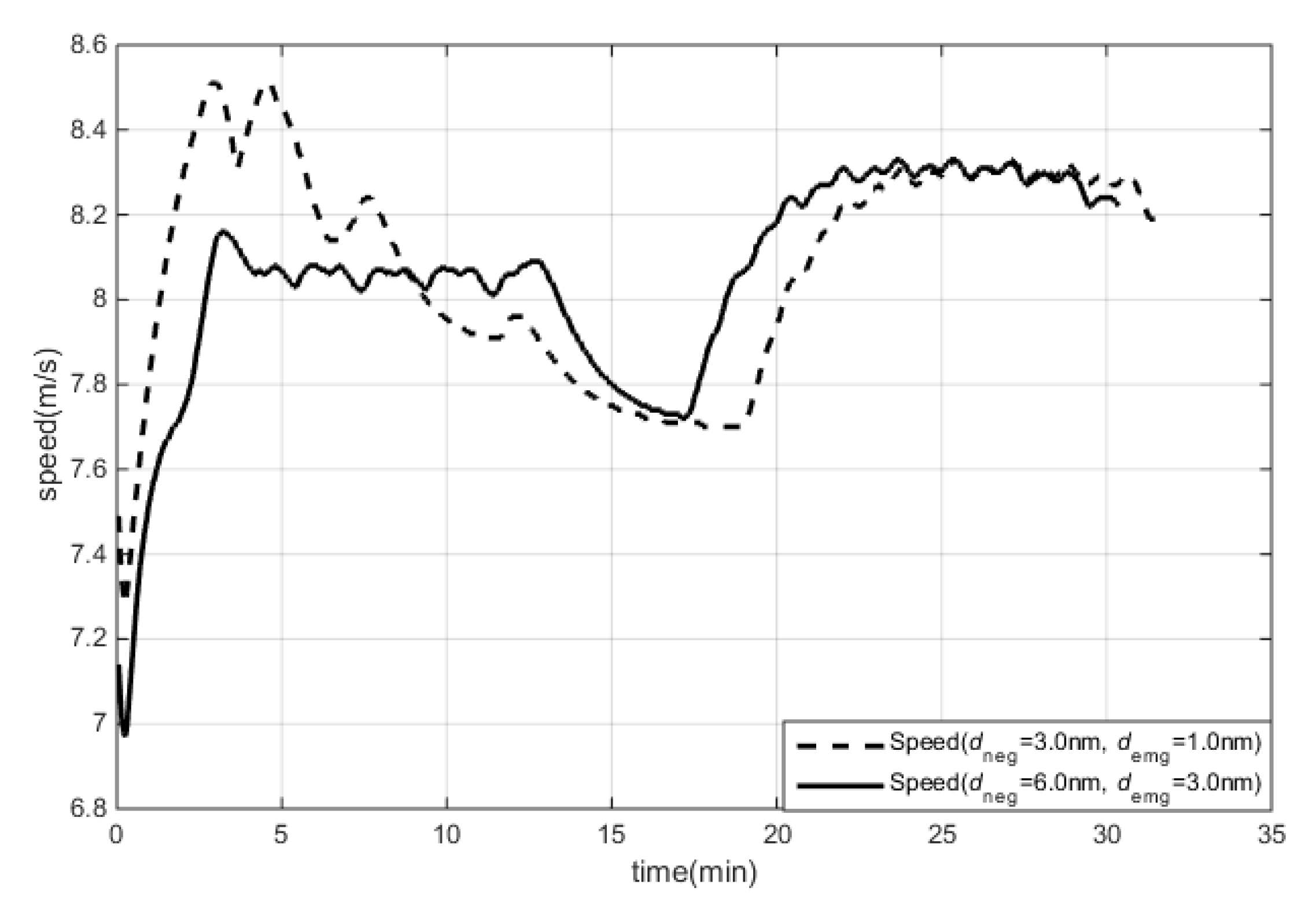
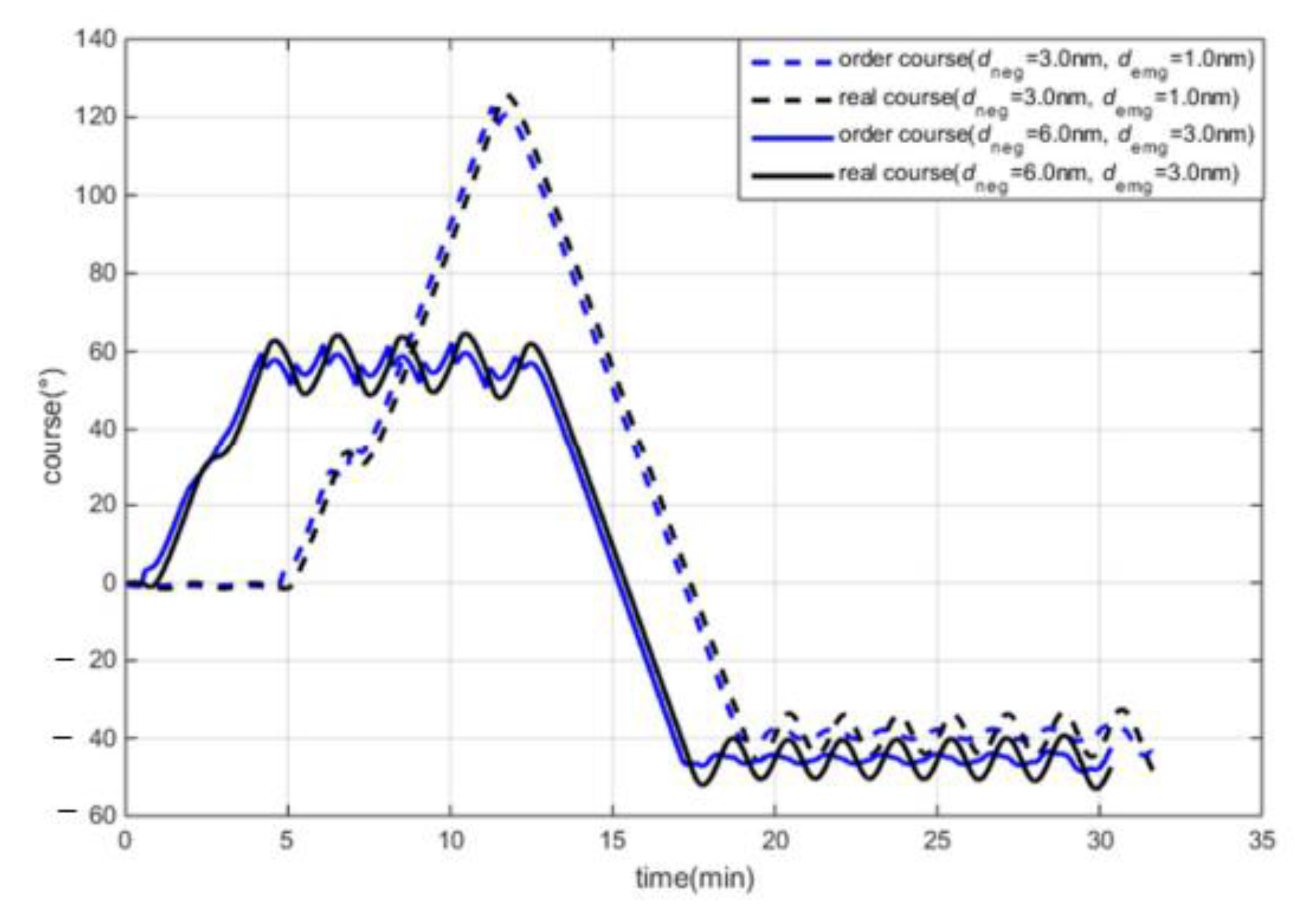
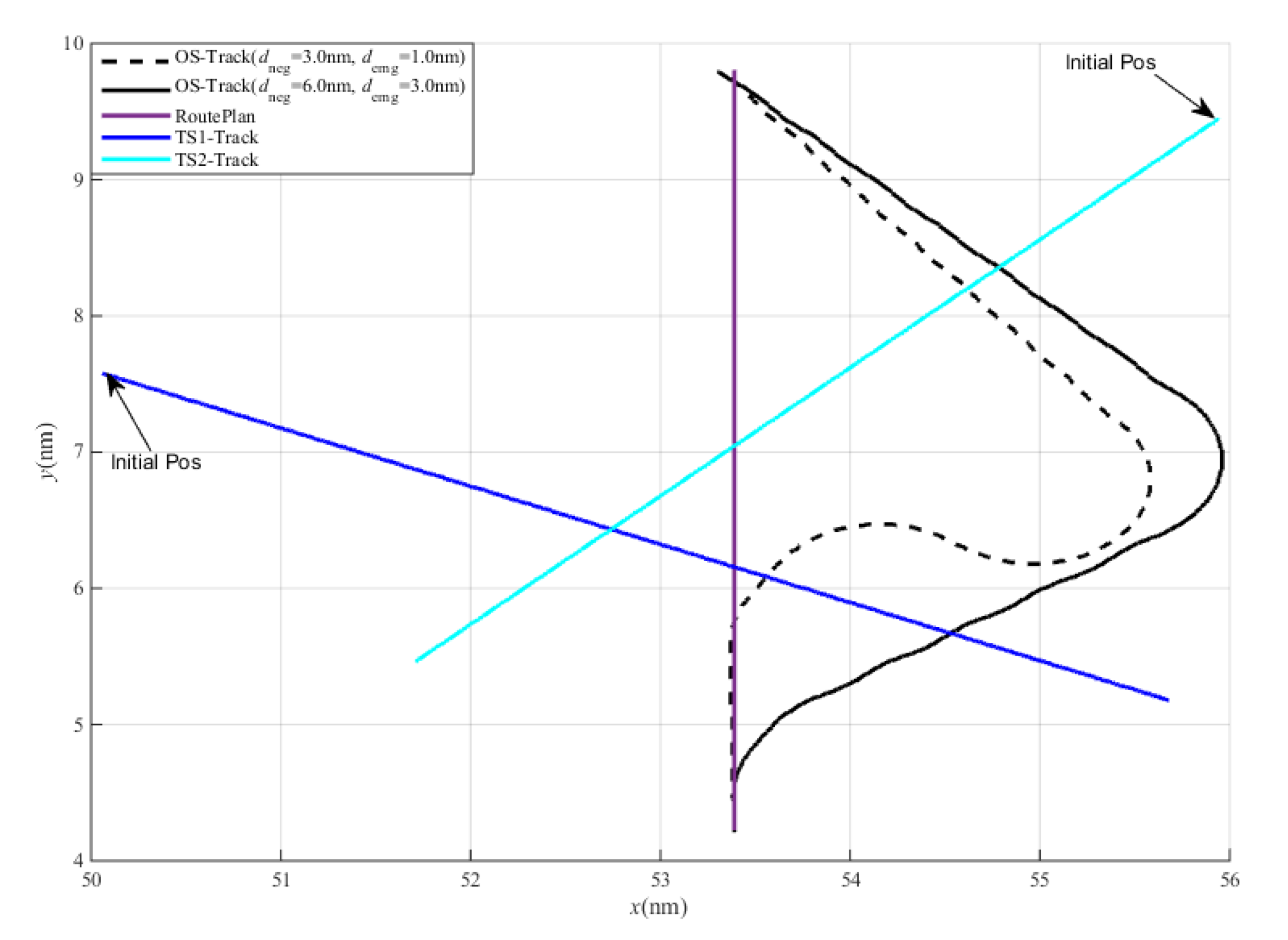
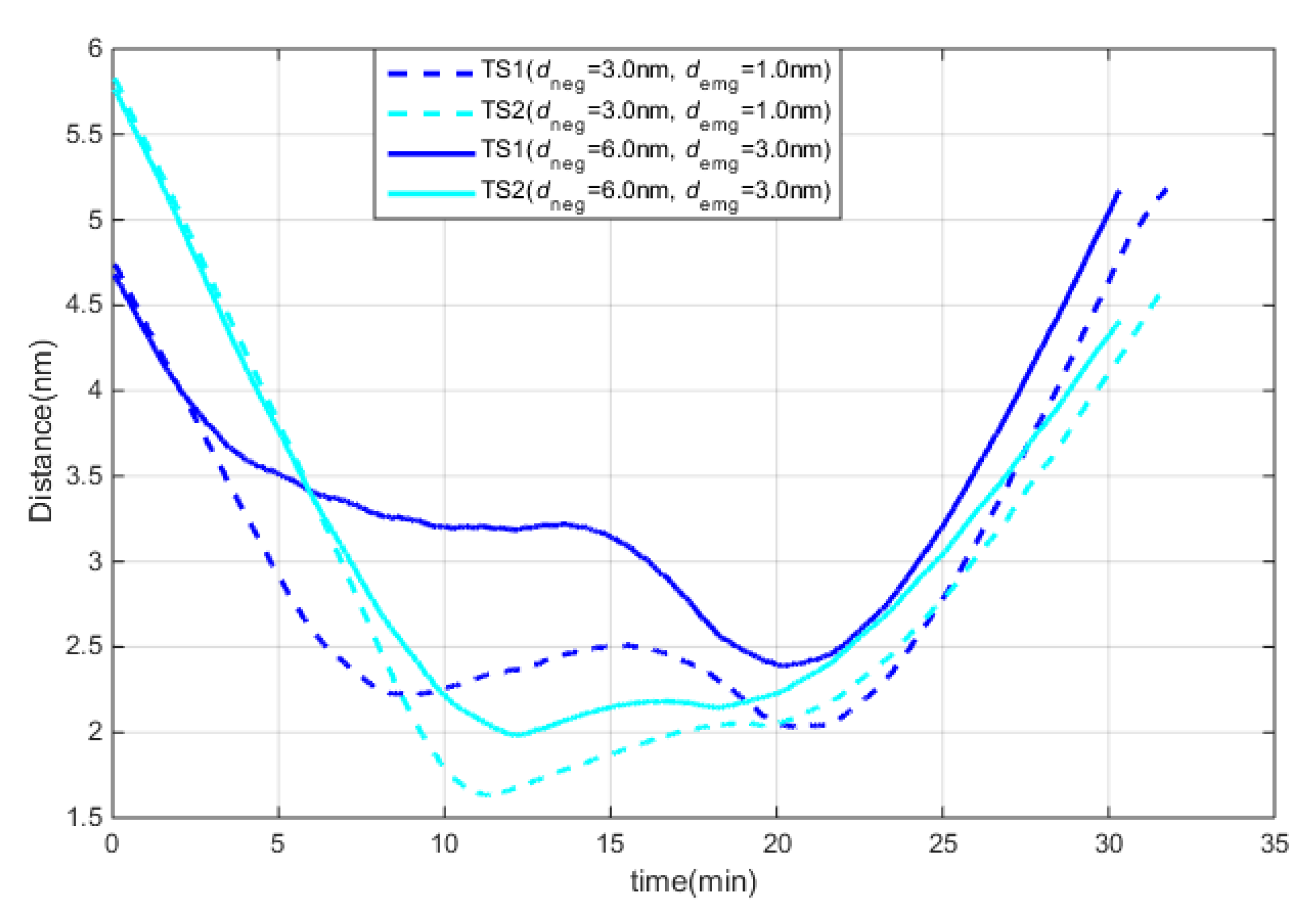
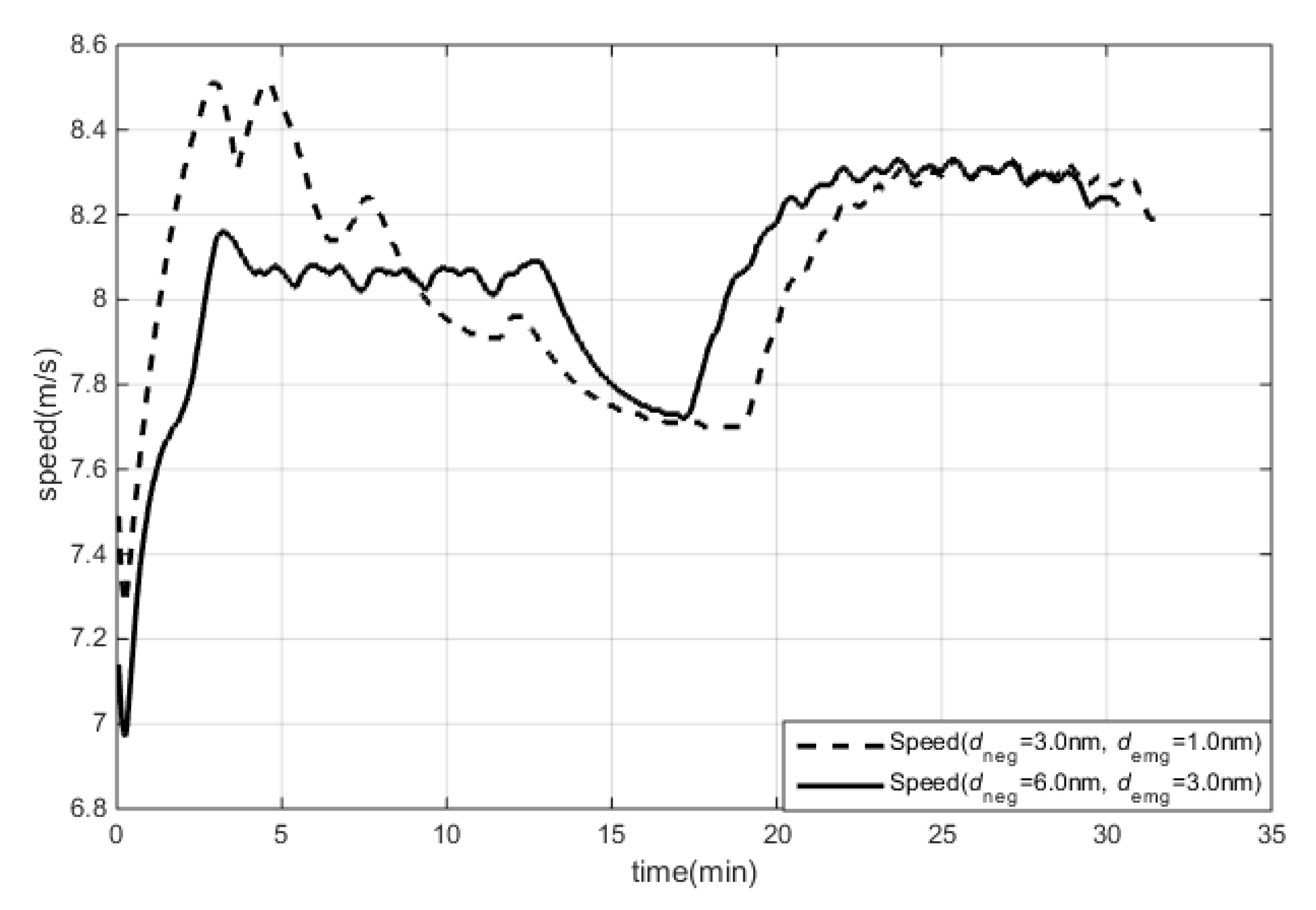
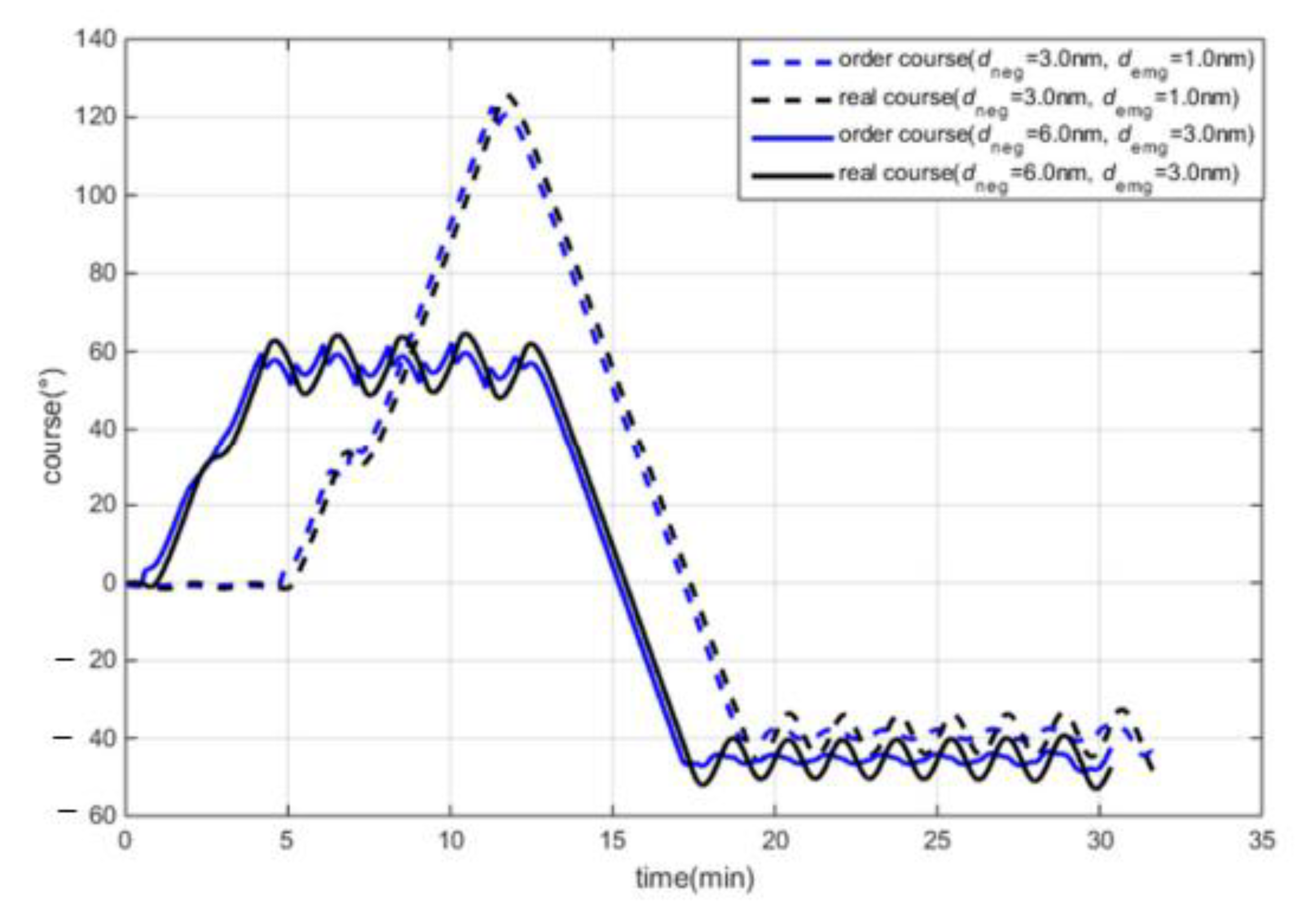
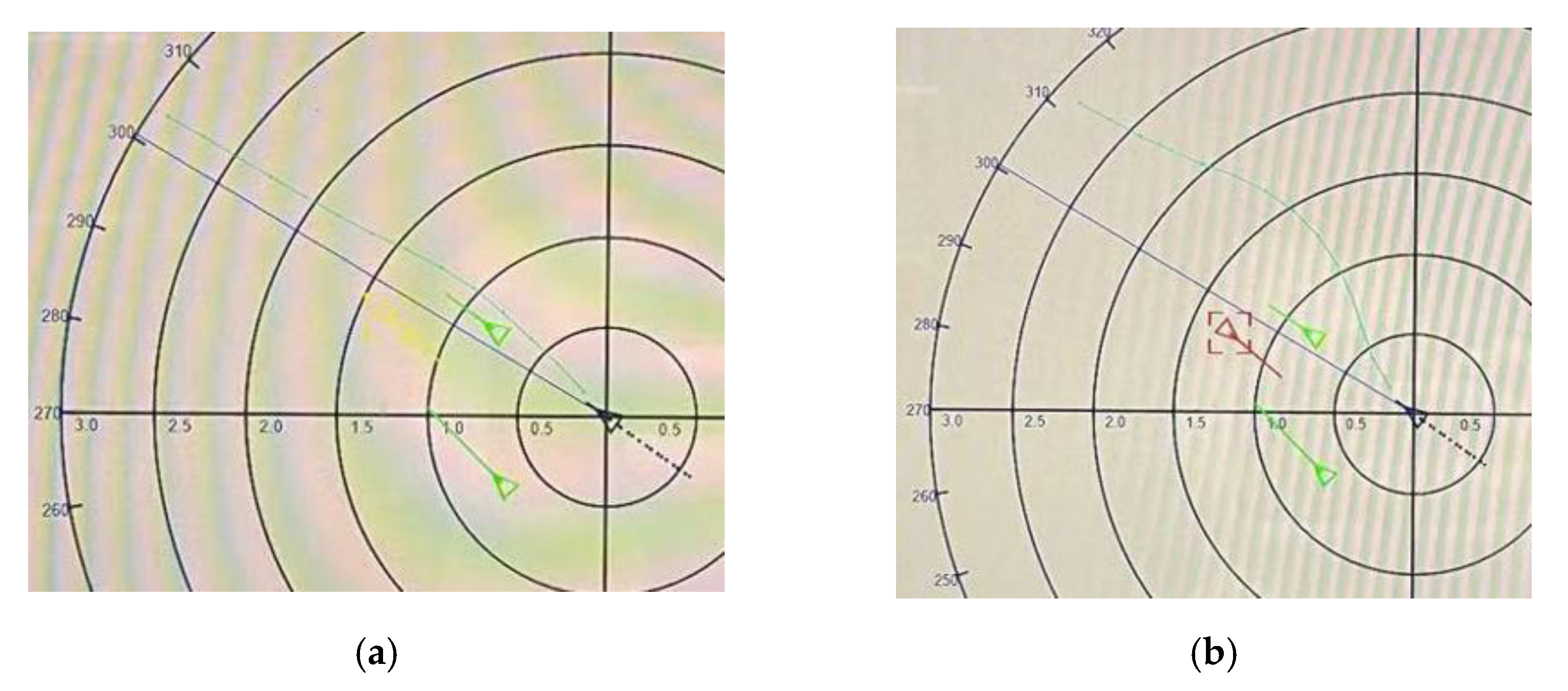
3.1. Range Criterion and Results
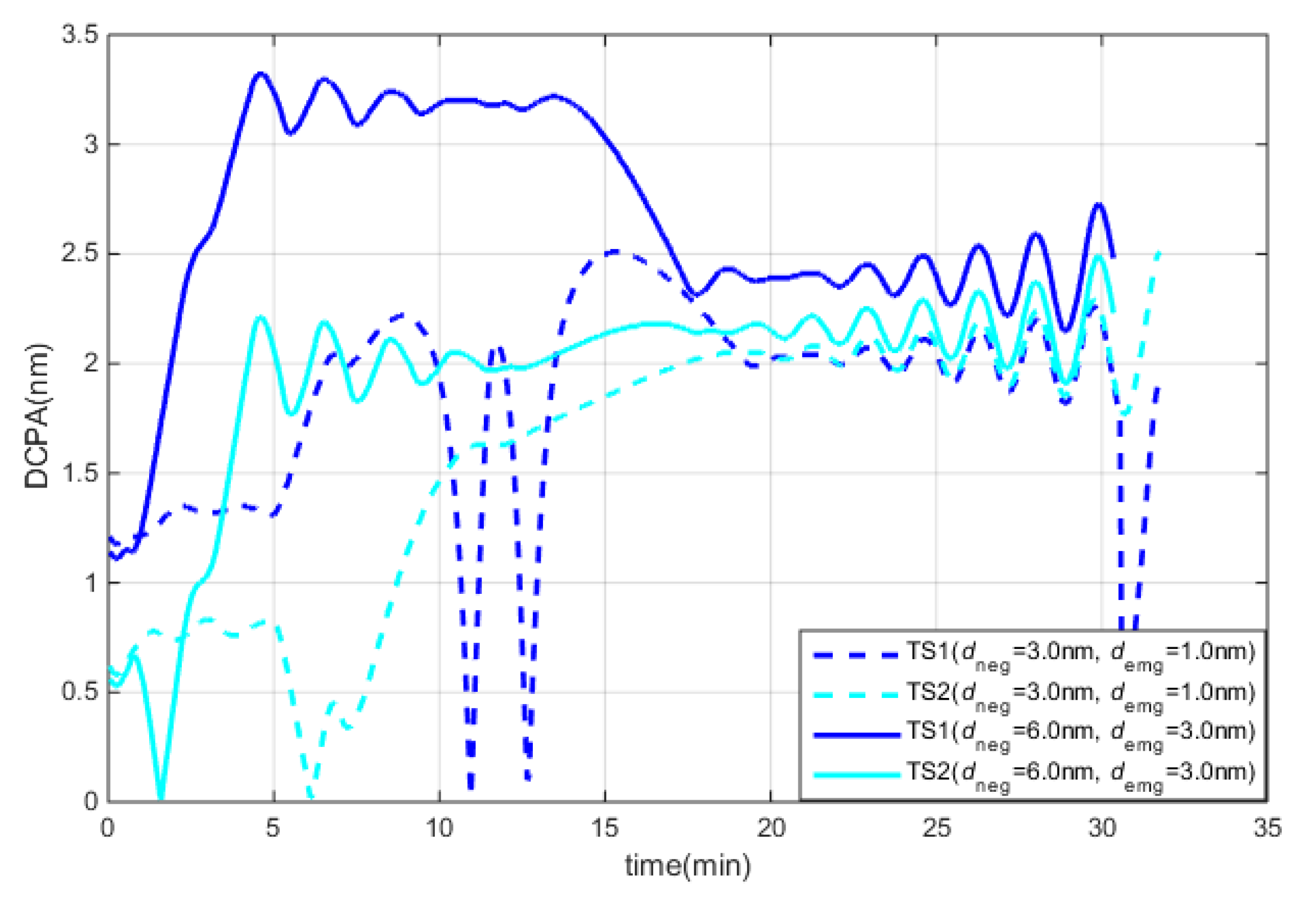
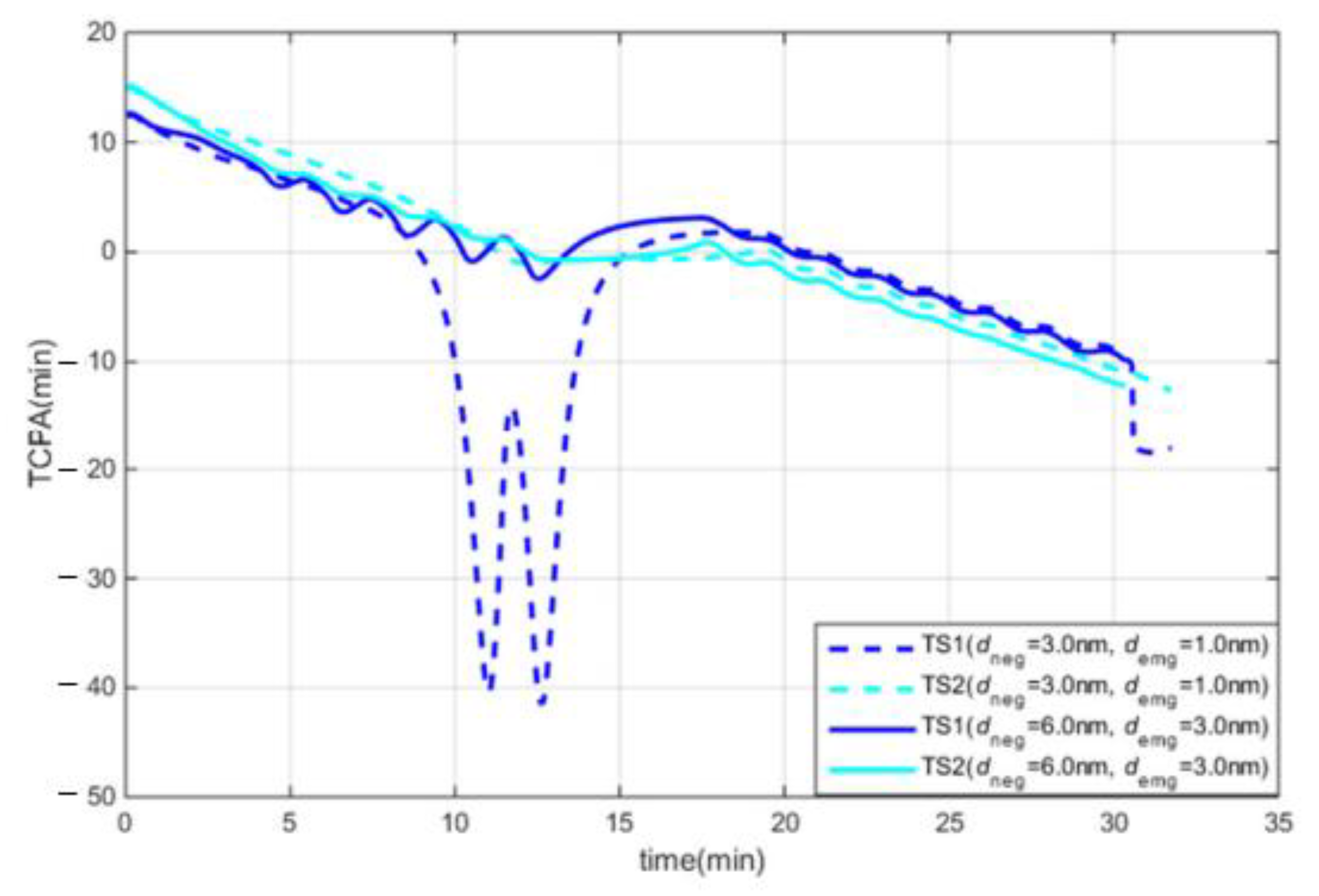
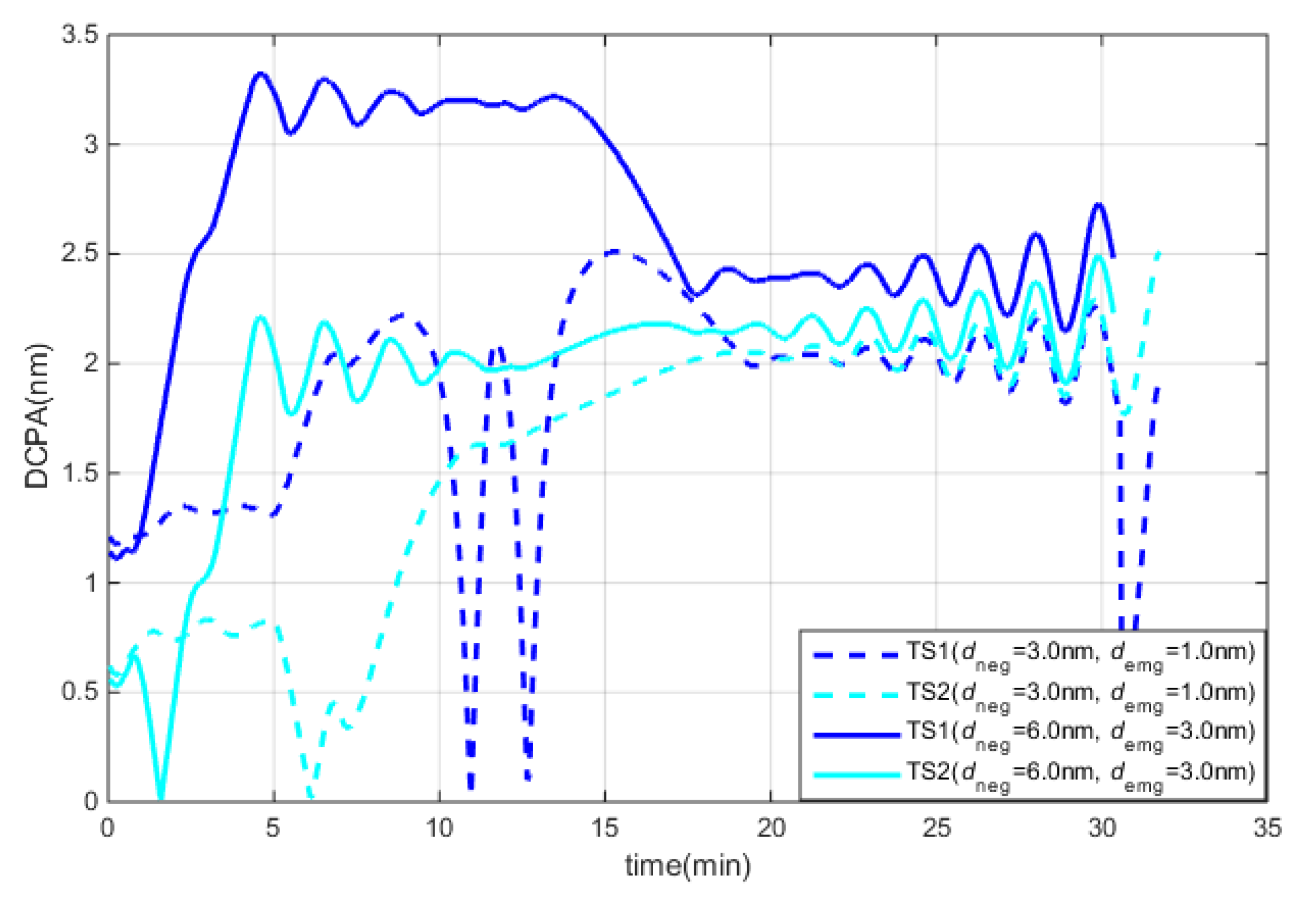
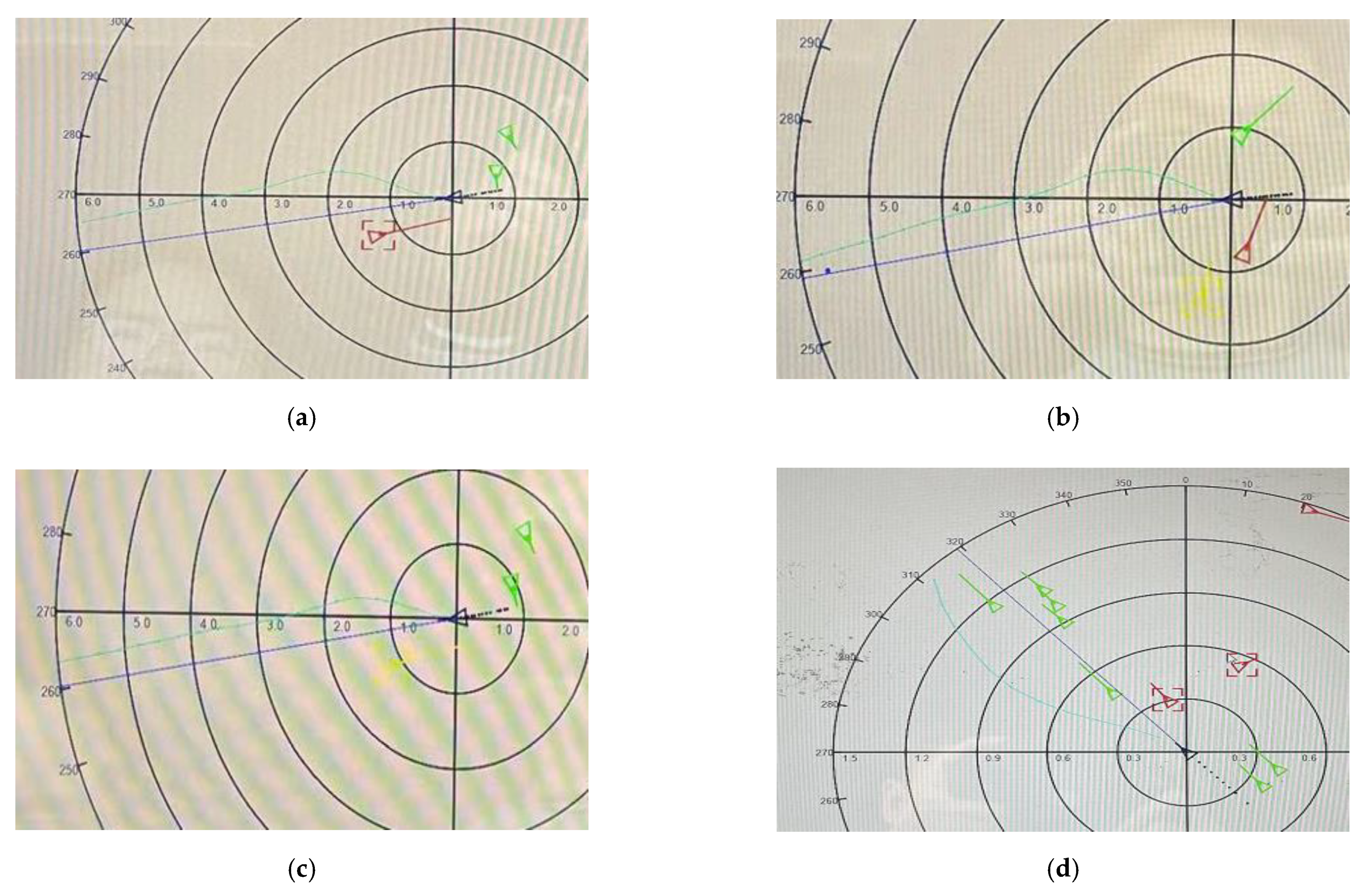
3.2. DCPA–TCPA Criterion and Results
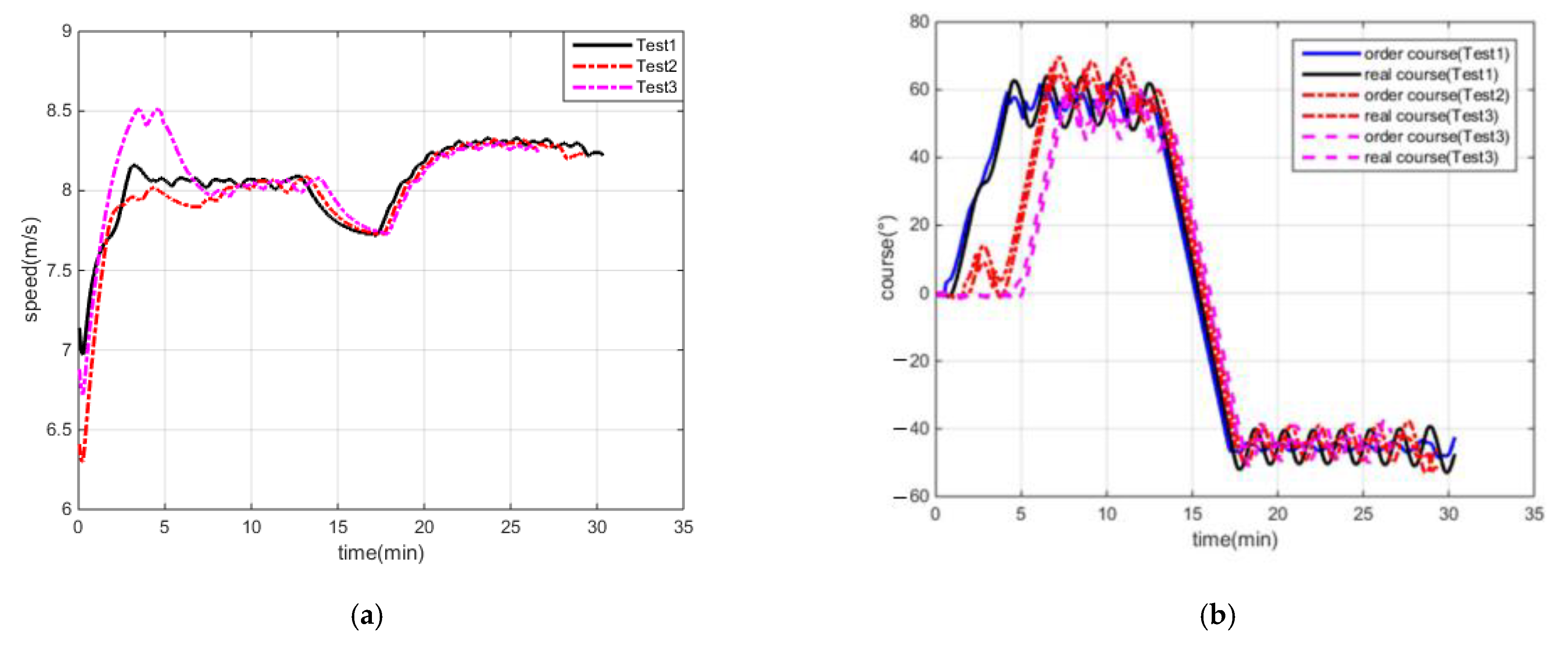
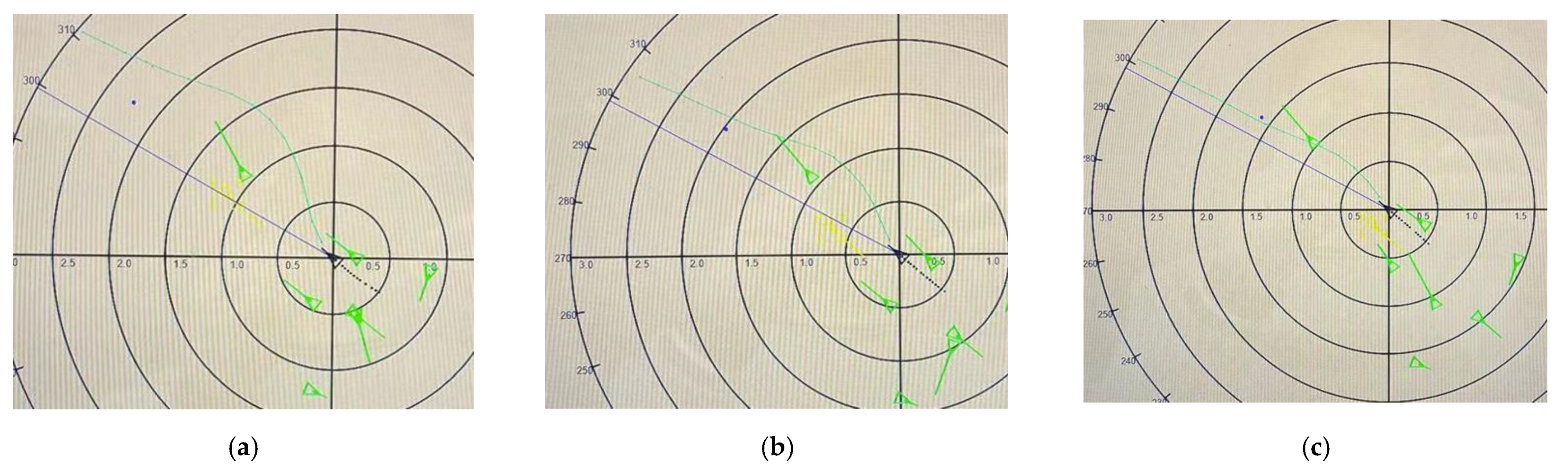
3.3. Onboard Tests
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hongguang, L.; Yong, Y. Path planning of autonomous ship based on electronic chart vector data modeling. J. Transp. Inf. Saf. 2019, 37, 94–106. [Google Scholar]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Chiang, H.-T.; Malone, N.; Lesser, K.; Oishi, M.; Tapia, L. Path-guided artificial potential fields with stochastic reachable sets for motion planning in highly dynamic environments. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 2 July 2015; pp. 2347–2354. [Google Scholar]
- Song, L.; Shi, X.; Sun, H.; Xu, K.; Huang, L. Collision avoidance algorithm for USV based on rolling obstacle classification and fuzzy rules. J. Mar. Sci. Eng. 2021, 9, 1321. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R. Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment. Ocean Eng. 2015, 97, 126–144. [Google Scholar] [CrossRef]
- Xue, Y.; Clelland, D.; Lee, B.; Han, D. Automatic simulation of ship navigation. Ocean. Eng. 2011, 38, 2290–2305. [Google Scholar] [CrossRef]
- Pêtrès, C.; Romero-Ramirez, M.-A.; Plumet, F. A potential field approach for reactive navigation of autonomous sailboats. Robot. Auton. Syst. 2012, 60, 1520–1527. [Google Scholar] [CrossRef]
- Wang, S.-M.; Fang, M.-C.; Hwang, C.-N. Vertical obstacle avoidance and navigation of autonomous underwater vehicles with H∞ controller and the artificial potential field method. J. Navig. 2019, 72, 207–228. [Google Scholar] [CrossRef]
- Yuanchang, L.; Richard, B. Efficient multi-task allocation and path planning for unmanned surface vehicle in support of ocean operations. Neurocomputing 2018, 275, 1550–1566. [Google Scholar]
- Mousazadeh, H.; Jafarbiglu, H.; Abdolmaleki, H.; Omrani, E.; Monhaseri, F.; Abdollahzadeh, M.-R.; Mohammadi-Aghdam, A.; Kiapei, A.; Salmani-Zakaria, Y.; Makhsoos, A. Developing a navigation, guidance and obstacle avoidance algorithm for an Unmanned Surface Vehicle (USV) by algorithms fusion. Ocean. Eng. 2018, 159, 56–65. [Google Scholar] [CrossRef]
- Peng, Y.; Huang, Z.; Tan, J.; Liu, Y. Calculating minimum distance between geometric objects represented with R-functions. Mech. Sci. Technol. Aerosp. Eng. 2016, 35, 1330–1336. [Google Scholar]
- Lyu, H.; Yin, Y. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Fast path planning for autonomous ships in restricted waters. Appl. Sci. 2018, 8, 2592. [Google Scholar] [CrossRef] [Green Version]
- Lyu, H.; Yin, Y. Ship’s trajectory planning for collision avoidance at sea based on modified artificial potential field. In Proceedings of the 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017; Volume 2017, pp. 351–357. [Google Scholar]
- Li, L.; Wu, D.; Huang, Y.; Yuan, Z.-M. A path planning strategy unified with a COLREGS collision avoidance function based on deep reinforcement learning and artificial potential field. Appl. Ocean. Res. 2021, 113, 102759. [Google Scholar] [CrossRef]
- Cheng-Bo, W.; Xin-Yu, Z.; Jia-Wei, Z.; Zhi-Guo, D.; Lan-Xuan, A. Navigation behavioural decision-making of MASS based on deep reinforcement learning and artificial potential field. J. Phys. Conf. Ser. 2019, 1357, 012026. [Google Scholar] [CrossRef] [Green Version]
- Fan, X.; Guo, Y.; Liu, H.; Wei, B.; Lyu, W. Improved artificial potential field method applied for AUV path plan-ning. Math. Probl. Eng. 2020, 1, 1–21. [Google Scholar]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean. Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe maritime autonomous navigation with COLREGS, using velocity obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Li, B.; Pang, F.-W. An approach of vessel collision risk assessment based on the D–S evidence theory. Ocean. Eng. 2013, 74, 16–21. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, W.; Shi, P. A real-time collision avoidance learning system for Unmanned Surface Vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Gang, L.; Wang, Y.; Sun, Y.; Zhou, L.; Zhang, M. Estimation of vessel collision risk index based on support vector machine. Adv. Mech. Eng. 2016, 8, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Ahn, J.-H.; Rhee, K.-P.; You, Y.-J. A study on the collision avoidance of a ship using neural networks and fuzzy logic. Appl. Ocean. Res. 2012, 37, 162–173. [Google Scholar] [CrossRef]
- Baldauf, M.; Benedict, K.; Fischer, S.; Motz, F.; Schröder-Hinrichs, J.-U. Collision avoidance systems in air and maritime traffic. Proc. Inst. Mech. Eng. Part. O J. Risk Reliab. 2011, 225, 333–343. [Google Scholar] [CrossRef]
- Shah, B.C.; Švec, P.; Bertaska, I.R.; Sinisterra, A.J.; Klinger, W.; von Ellenrieder, K.; Dhanak, M.; Gupta, S.K. Resolution-adaptive risk-aware trajectory planning for surface vehicles operating in congested civilian traffic. Auton. Robot. 2016, 40, 1139–1163. [Google Scholar] [CrossRef]
- Mediavilla, J.; Hirdaris, S.; Smith, R.; Scialla, P.; Rajabally, E. MAXCMAS project-autonomous COLREGS compliant ship navigation. In Proceedings of the 16th Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT), Cardiff, UK, 15–17 May 2017; Volume 5. [Google Scholar]
- Borkowski, P.; Pietrzykowski, Z.; Magaj, J. The algorithm of determining an anti-collision manoeuvre trajectory based on the interpolation of ship’s state vector. Sensors 2021, 21, 5332. [Google Scholar] [CrossRef] [PubMed]
- Jing, Q.; Sasa, K.; Chen, C.; Yin, Y.; Yasukawa, H.; Terada, D. Analysis of ship maneuvering difficulties under severe weather based on onboard measurements and realistic simulation of ocean environment. Ocean. Eng. 2021, 221, 108524. [Google Scholar] [CrossRef]
- Jing, Q.; Shen, H.; Yin, Y. Motion modeling and simulation of maritime autonomous surface ships in realistic environmental disturbances. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–7. [Google Scholar]
- Chen, G.; Yin, Y.; Li, L.; Yang, S. Mechanism and simulation of personifying intelligent decision-making for vessel collision avoidance. In Proceedings of the 2010 International Conference on Computer Application and System Modeling (ICCASM 2010), Taiyuan, China, 22–24 October 2010; Volume 4, pp. V4-681–V4-686. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
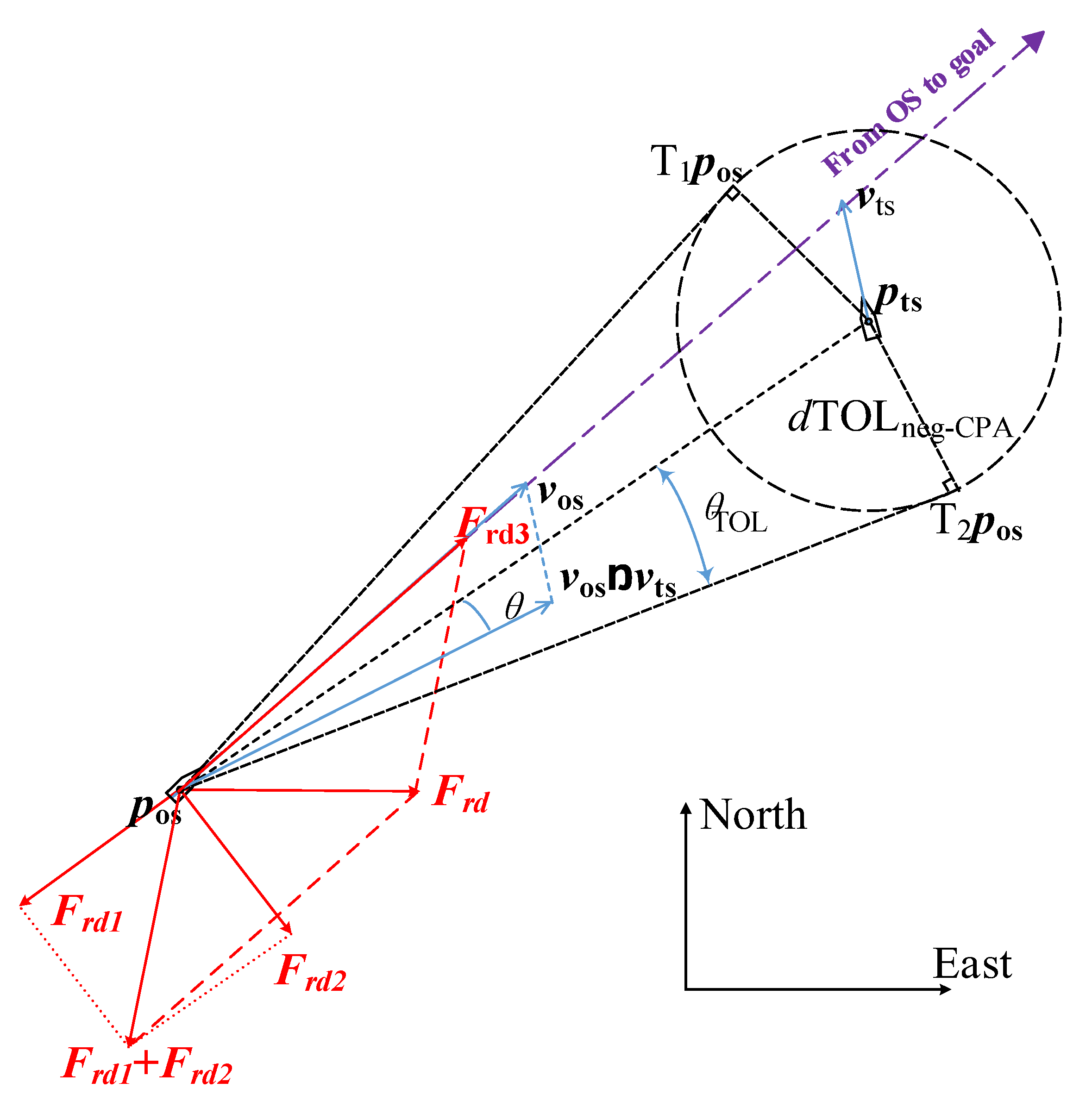
| CA Module | Repulsive Force | Direction | Action |
|---|---|---|---|
| Negotiation CA | Frd1 | Point from TS to OS | Make OS move away from TS |
| Frd2 | Perpendicular to Frd1 and to right side | Make OS alter course to starboard when based on the practice of seafarers, as the appropriate passing side for each encounter is determined by COLREGS | |
| Frd3 | Point from OS to goal | Make OS head for goal | |
| Emergency CA | Fre1 | Point from TS to OS | Make OS move away from TS |
| Fre2 | Perpendicular to Fre1 | Make OS alter course to starboard or port side depending on which side of the vector is located | |
| Fre3 | Point from OS to goal | Make OS head for the goal |
| Name | Length (m) | Breadth (m) | Draft (m) | Disp. (m3) | Speed (kn) | Course (°) | Initial Position | Position of Goal | |
|---|---|---|---|---|---|---|---|---|---|
| OS | “KangHe” | 259.0 | 32.0 | 9.5 | 43,067.0 | 16.0 | 358.6 | 39°00.1482′ 122°47.6834′ | 39°05.8285′ 122°47.6834′ |
| TS1 | “YinHe” | 168.0 | 28.0 | 9.5 | 28,849.0 | 12.0 | 113.1 | 39°03.6780′ 122°43.3710′ | 39°01.1824′ 122°50.6475′ |
| TS2 | AnGuangJiang | 147.0 | 22.0 | 9.0 | 19,708.0 | 11.0 | 226.7 | 39°05.4892′ 122°51.1232′ | 39°01.4012′ 122°45.3875′ |
| Parameters | Value | Parameters | Value | |
|---|---|---|---|---|
| Test 1 | Emergency CA range criterion | = 1.0 nm | Negotiation CA range criterion | = 3.0 nm |
| Test 2 | Emergency CA range criterion | = 3.0 nm | Negotiation CA range criterion | = 6.0 nm |
| Emergency CA DCPA–TCPA criterion | = 6.0 min = 1.0 nm | Negotiation CA DCPA–TCPA criterion | = 12.0 min = 2.0 nm |
| Item | Test 1 | Test 2 |
|---|---|---|
| Course alteration | 125° | 65° |
| Pass and clear distance with TS1 | 2.0 nm | 2.4 nm |
| Pass and clear distance with TS2 | 1.63 nm | 2.0 nm |
| Head for destination course | 315° | 320° |
| Parameters | Value | Parameters | Value | |
|---|---|---|---|---|
| Emergency CA range criterion | = 3.0 nm | Negotiation CA range criterion | = 6.0 nm | |
| Test 1 | Emergency CA DCPA–TCPA criterion | = 6.0 min = 1.0 nm | Negotiation CA DCPA–TCPA criterion | = 12.0 min = 2.0 nm |
| Test 2 | Emergency CA DCPA–TCPA criterion | = 5.0 min = 0.75 nm | Negotiation CA DCPA–TCPA criterion | = 10.0 min = 1.5 nm |
| Test 3 | Emergency CA DCPA–TCPA criterion | = 4.5 min = 0.5 nm | Negotiation CA DCPA–TCPA criterion | = 9.0 min = 1.0 nm |
| Item | Test 1 | Test 2 | Test 3 |
|---|---|---|---|
| Course alteration | 55° | 60° | 53° |
| Pass and clear distance with TS1 | 2.5 nm | 2.4 nm | 2.2 nm |
| Pass and clear distance with TS2 | 2.0 nm | 1.5 nm | 1.0 nm |
| Head for destination course | 312° | 314° | 314° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Lyu, H.; Zhang, J.; Yin, Y. An Efficient Ship Automatic Collision Avoidance Method Based on Modified Artificial Potential Field. J. Mar. Sci. Eng. 2022, 10, 3. https://doi.org/10.3390/jmse10010003
Zhu Z, Lyu H, Zhang J, Yin Y. An Efficient Ship Automatic Collision Avoidance Method Based on Modified Artificial Potential Field. Journal of Marine Science and Engineering. 2022; 10(1):3. https://doi.org/10.3390/jmse10010003
Chicago/Turabian StyleZhu, Zhongxian, Hongguang Lyu, Jundong Zhang, and Yong Yin. 2022. "An Efficient Ship Automatic Collision Avoidance Method Based on Modified Artificial Potential Field" Journal of Marine Science and Engineering 10, no. 1: 3. https://doi.org/10.3390/jmse10010003
APA StyleZhu, Z., Lyu, H., Zhang, J., & Yin, Y. (2022). An Efficient Ship Automatic Collision Avoidance Method Based on Modified Artificial Potential Field. Journal of Marine Science and Engineering, 10(1), 3. https://doi.org/10.3390/jmse10010003