
Study on the Resonant Behaviors of a Bottom-Hinged Oscillating Wave Surge Converter


Abstract
:1. Introduction
2. Numerical Model Based on BEM
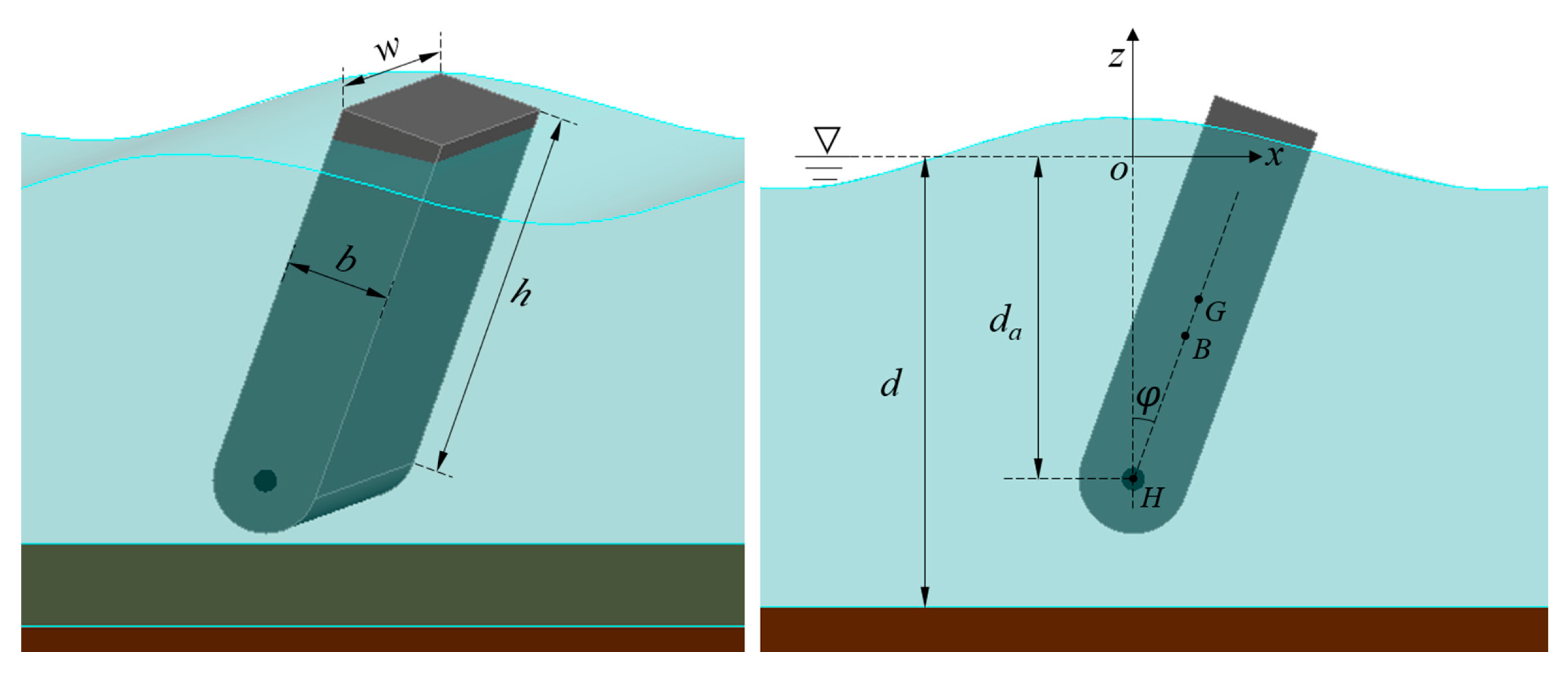
2.1. Environmental Load in the Sea
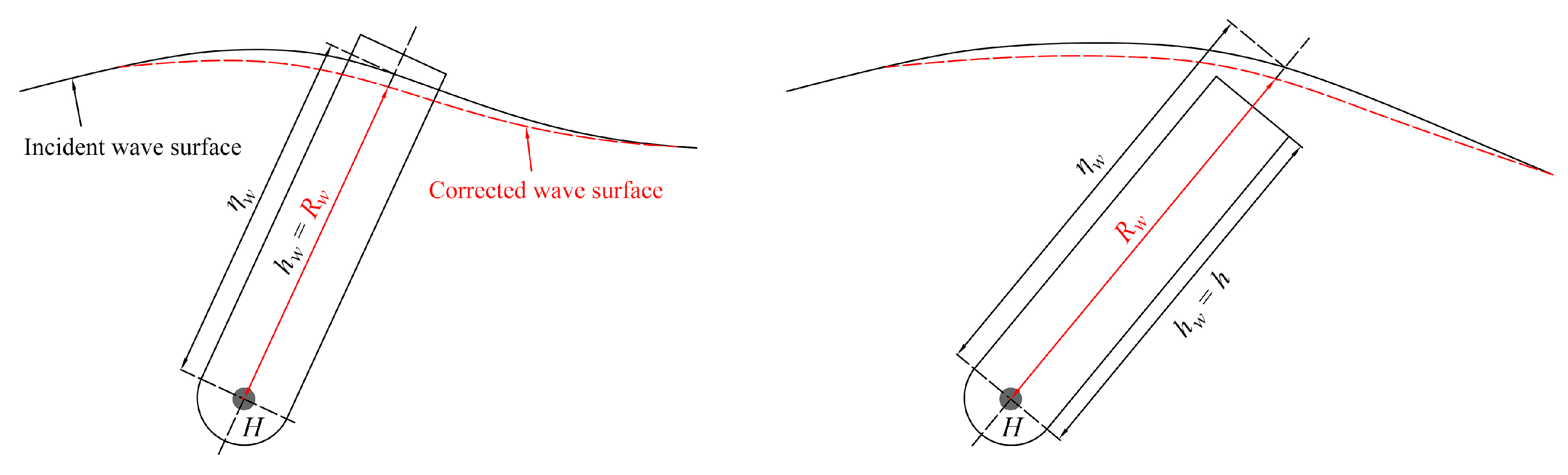
2.1.1. Incident Wave Elevation and Corrected Wave Surface
2.1.2. Wave Exciting Moment
2.1.3. Radiation Damping Moment
2.1.4. Restoring Moment
2.1.5. Drag Moment
2.1.6. Power Take-Off (PTO) Moment
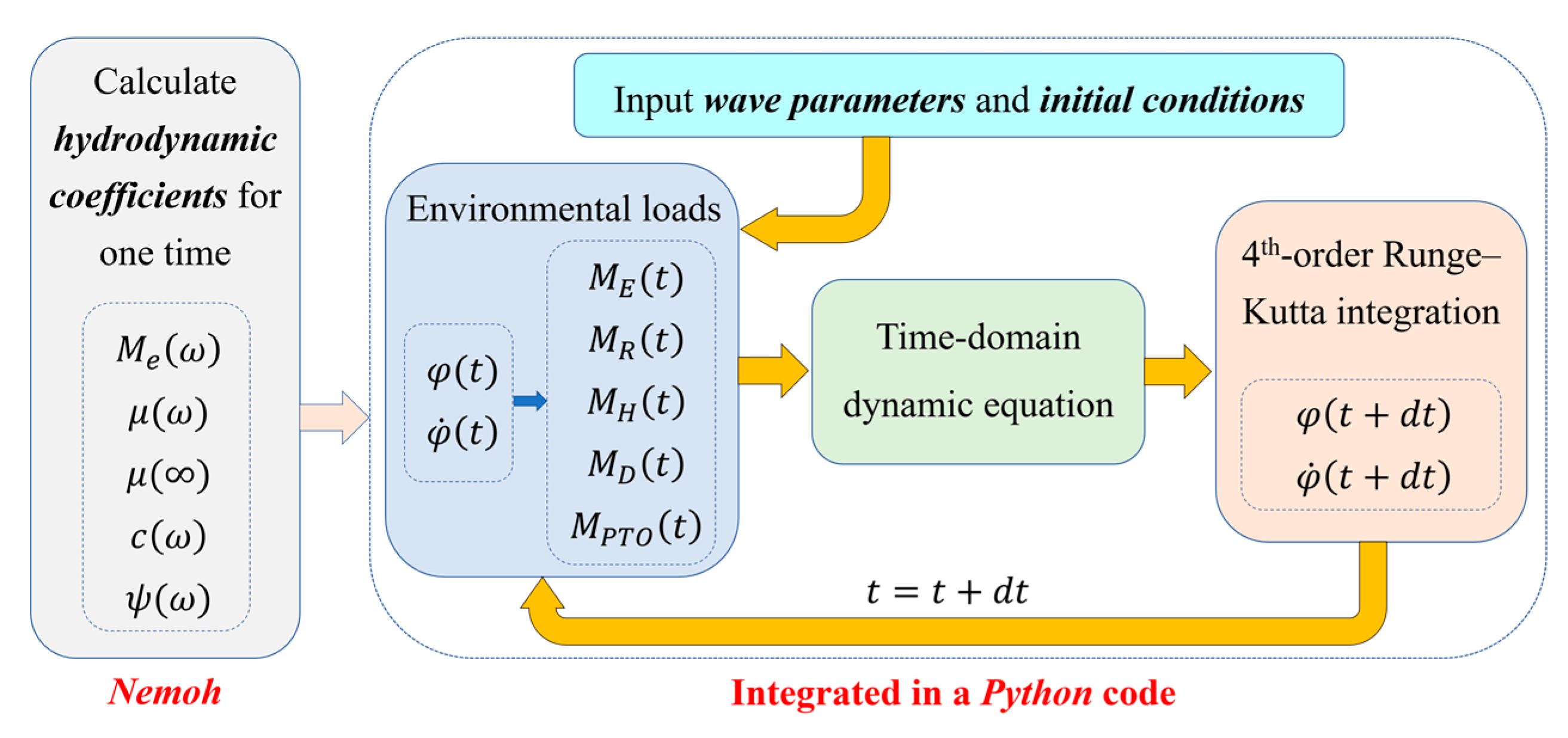
2.2. Time Domain Dynamic Equation
- Using the solutions of angle and angular velocity at the previous time , the environmental loads can be calculated by Equations (4), (5), (7), (10) and (14);
- Substitute the values of environmental loads into Equation (16) to assemble a dynamic differential equation;
- By 4th-order Runge–Kutta integration, the hydrodynamic responses of the flap at the current time () can be computed, where is the time step of integration.
2.3. Perormance Assessment
2.4. Response of Motion
3. Numerical Model Based on CFD
3.1. Governing Equations
3.2. Set-Up in OpenFOAM
4. Model and Mesh
4.1. Study Model
4.2. Mesh
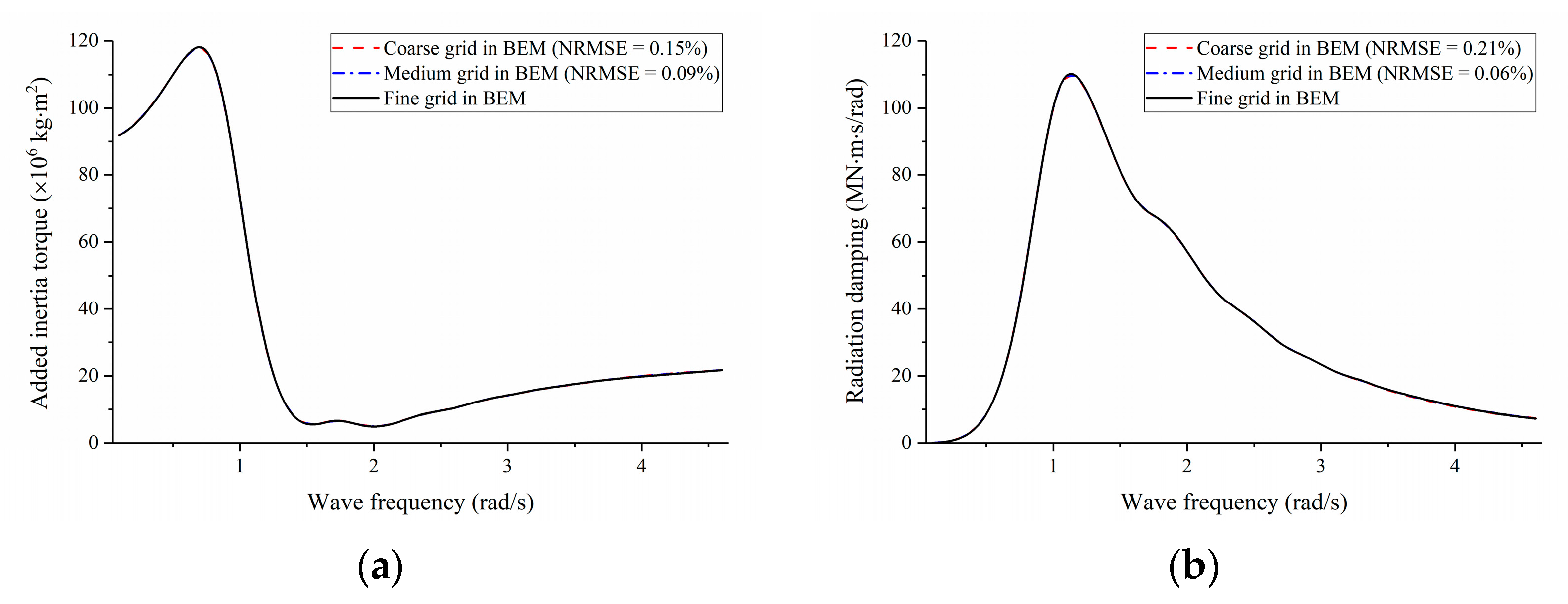
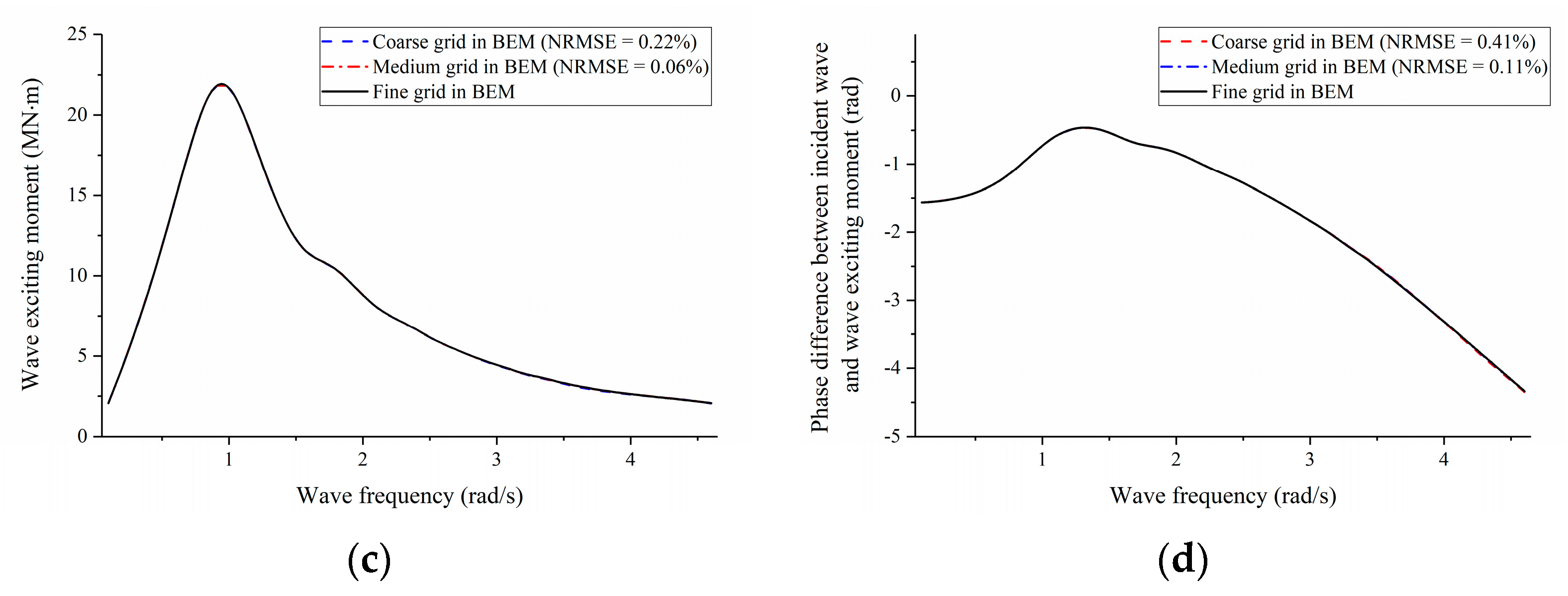
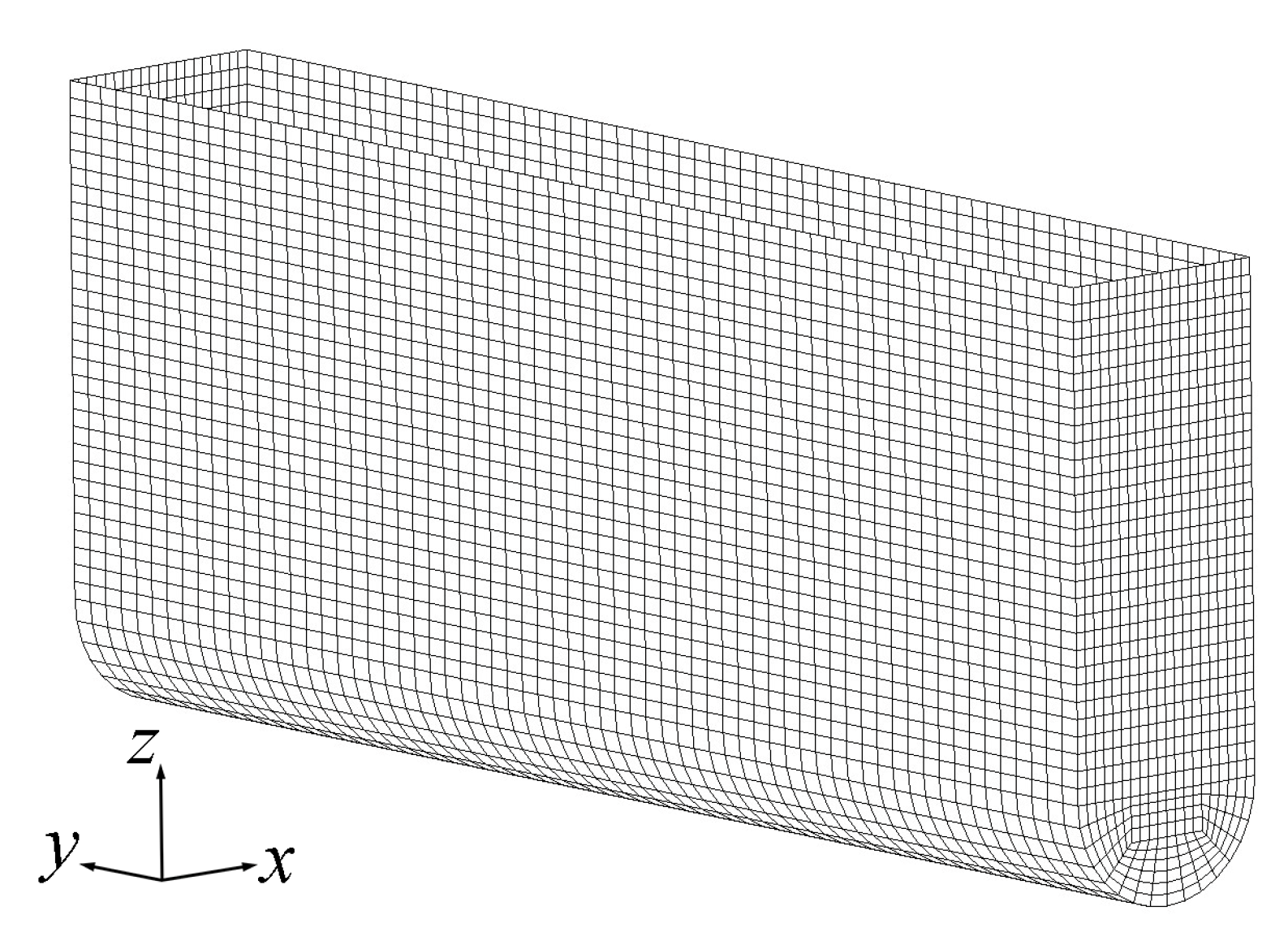
4.2.1. BEM Grids
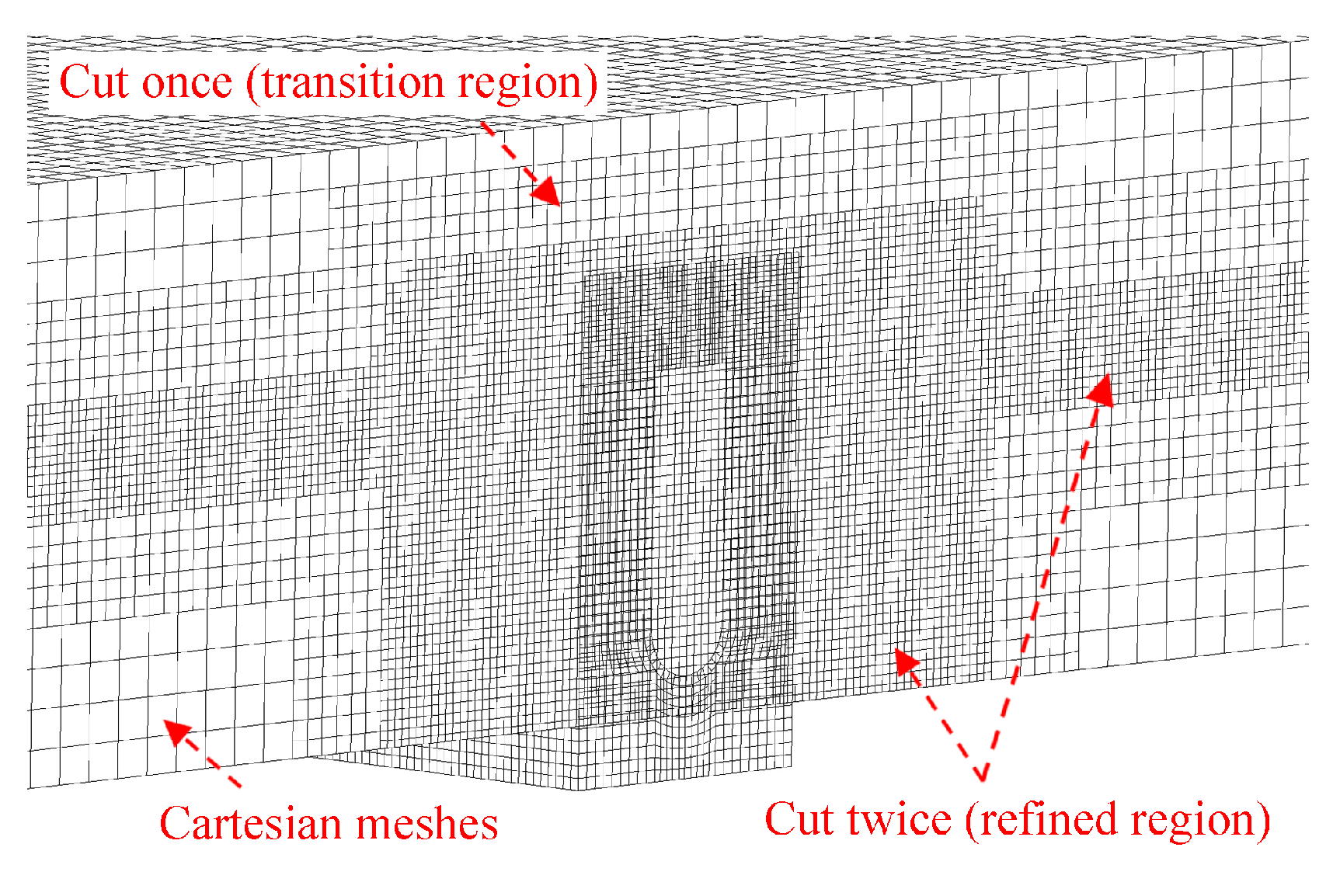
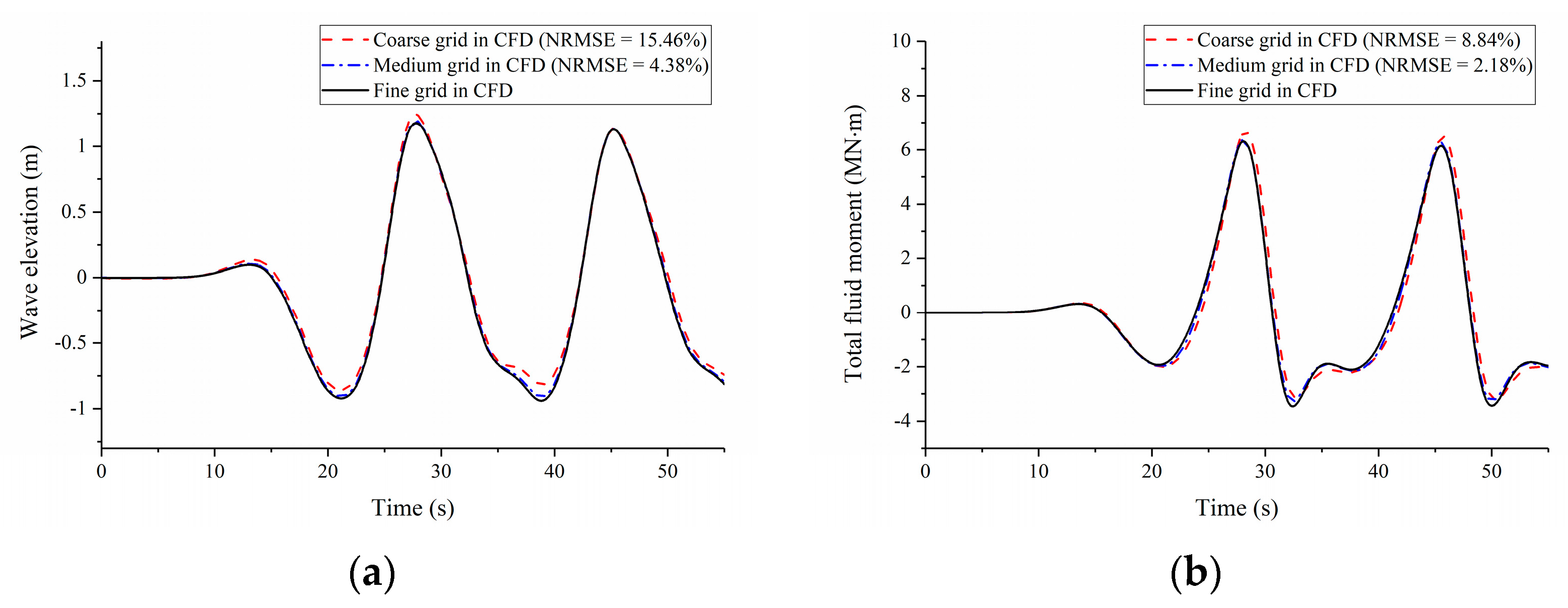
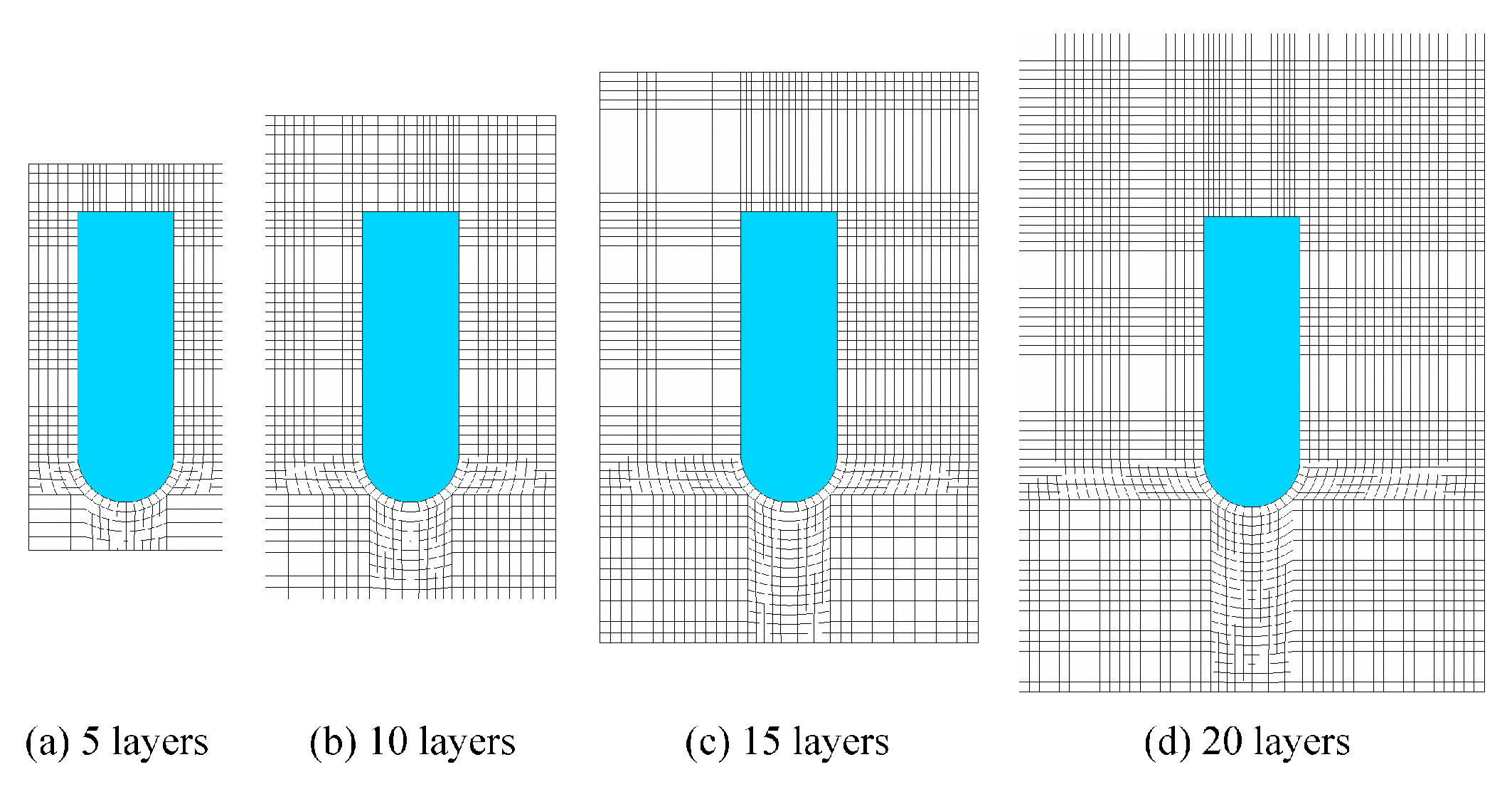
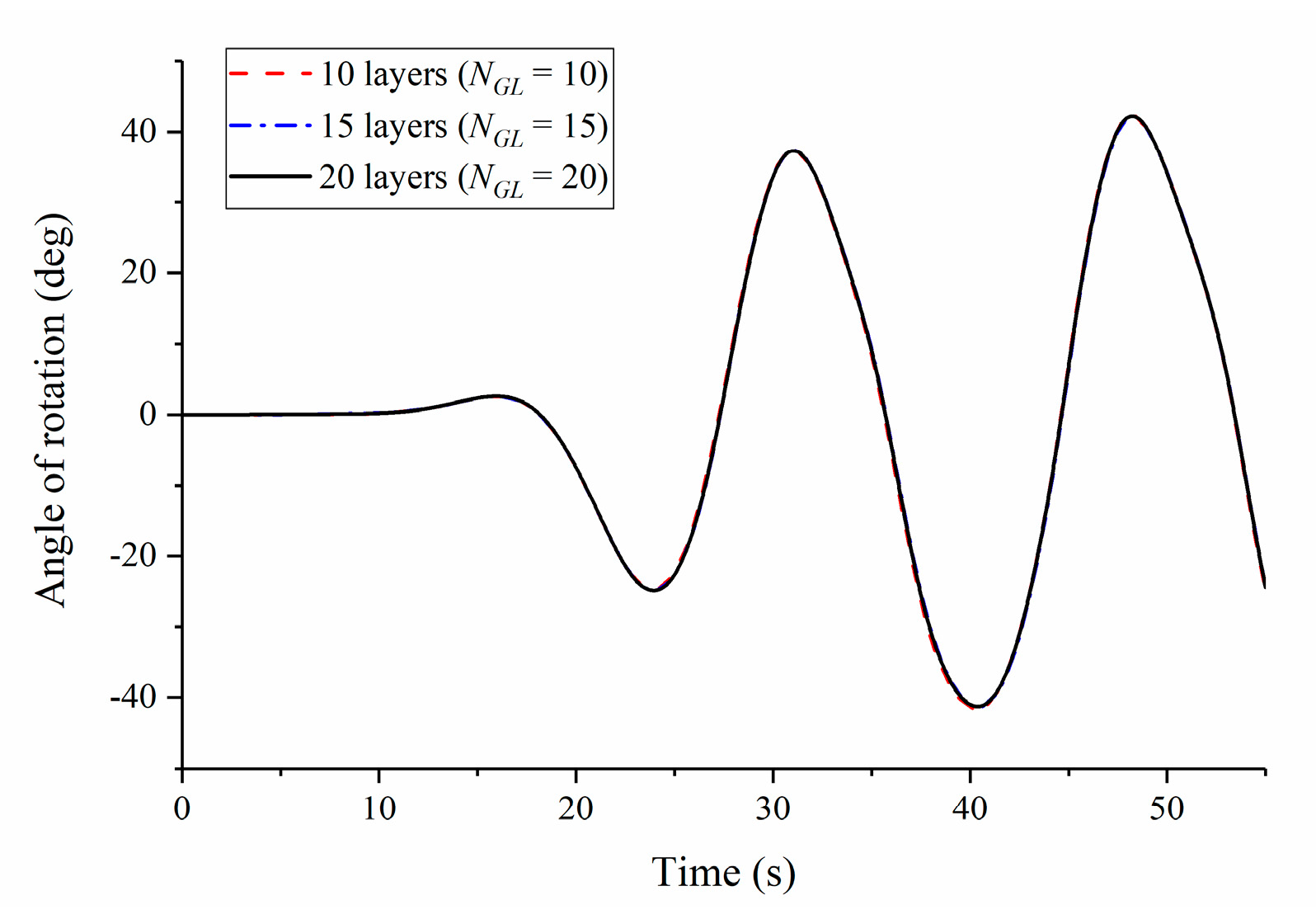
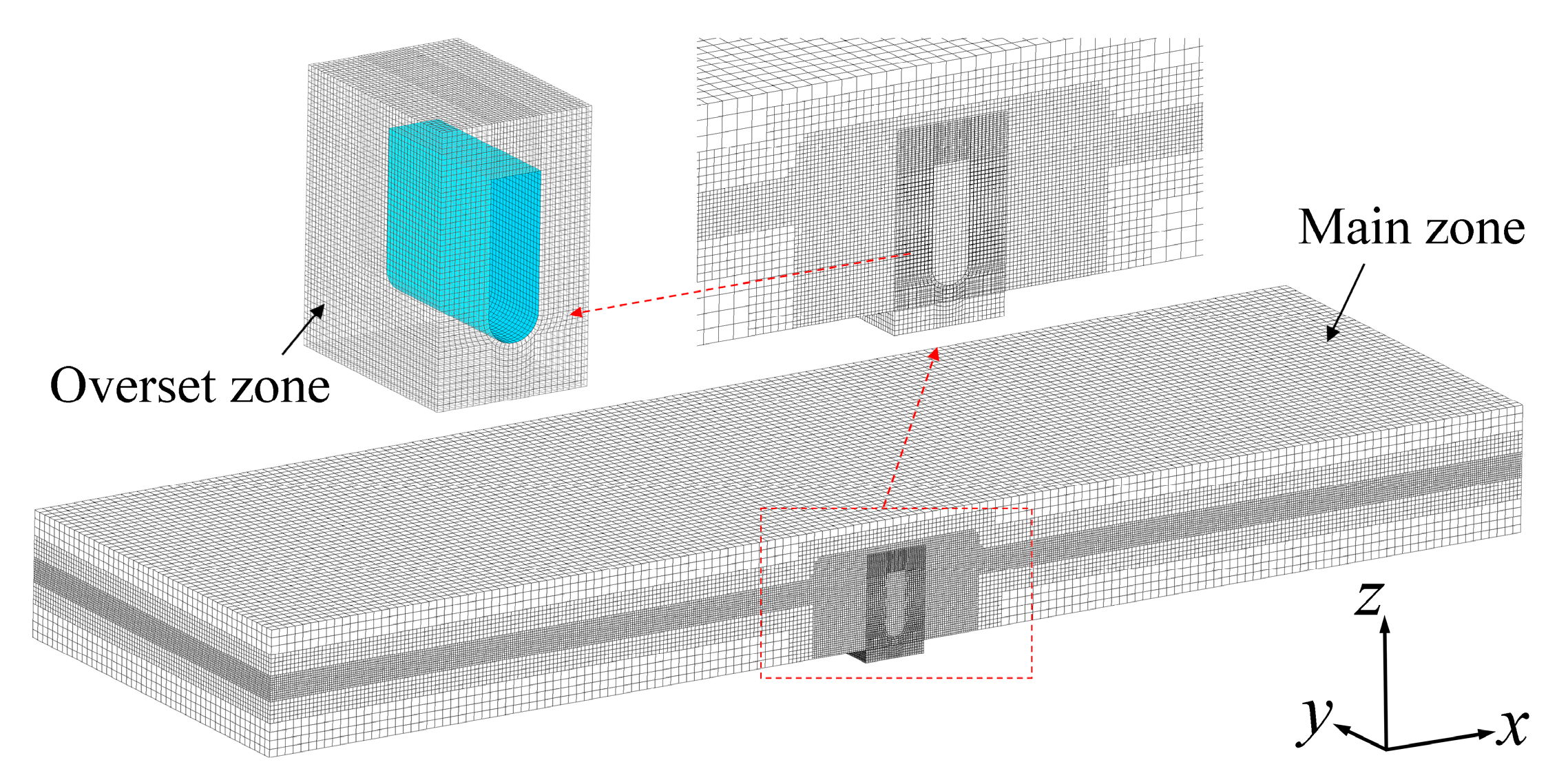
4.2.2. CFD Grids
- The overall Cartesian meshes with almost uniform size are constructed;
- The transition region and refined region (near the water surface and overset zone) are cut off once, and their grid size bisects;
- Cut off the meshes in the refined region again, so the grid size of refined region is a quarter of outermost Cartesian region.
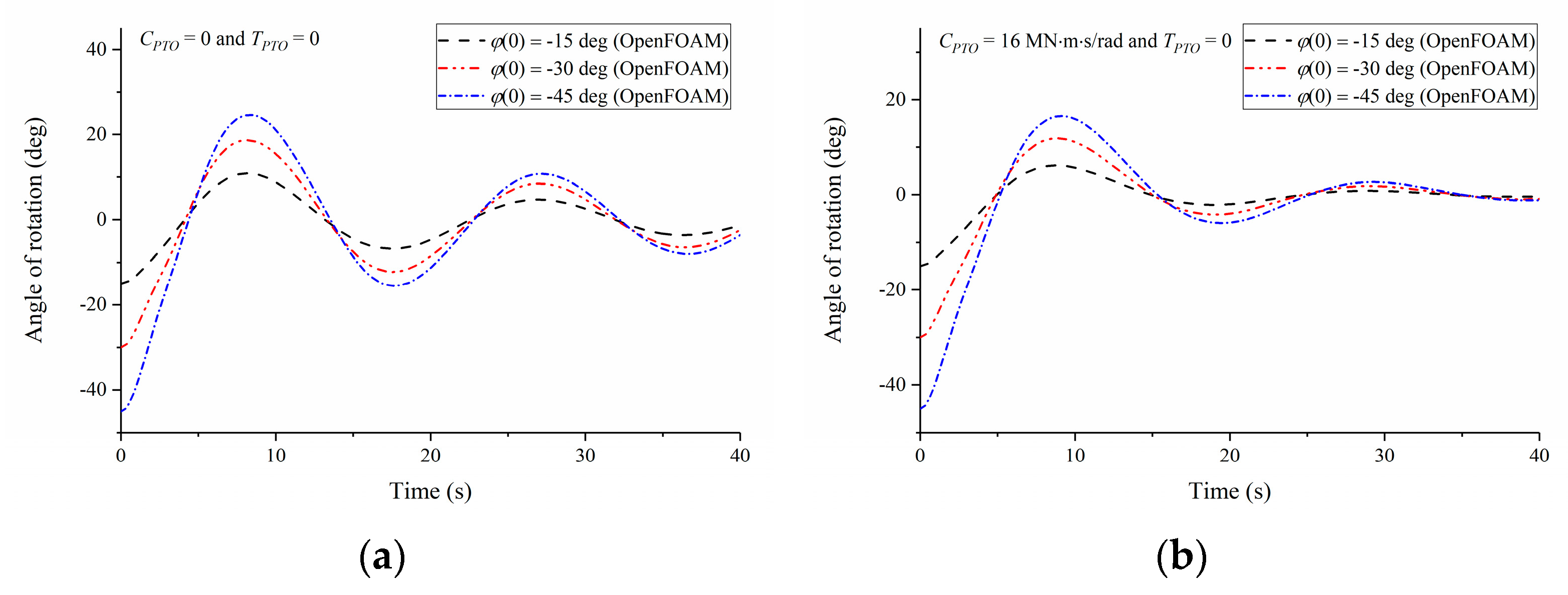
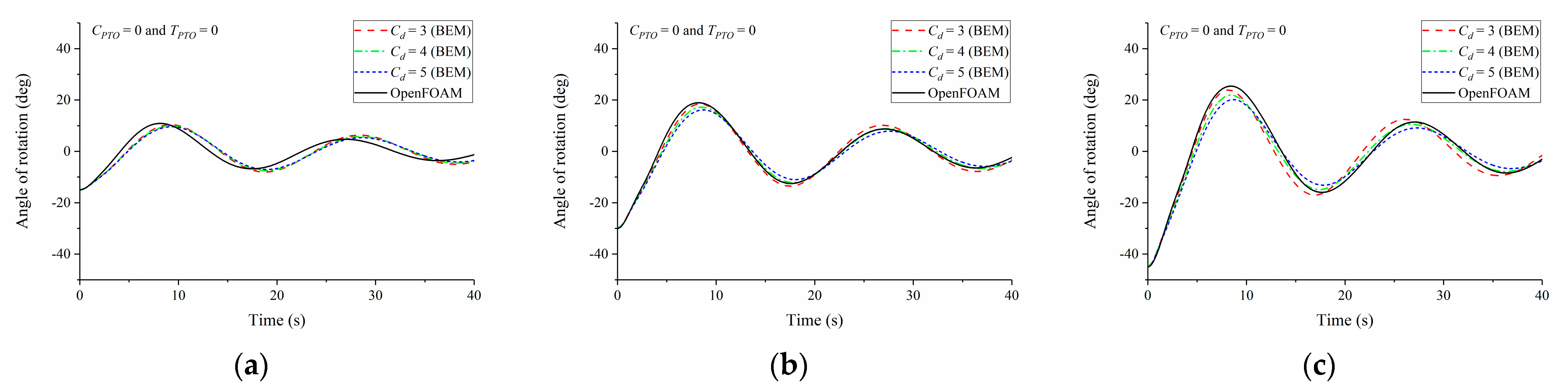
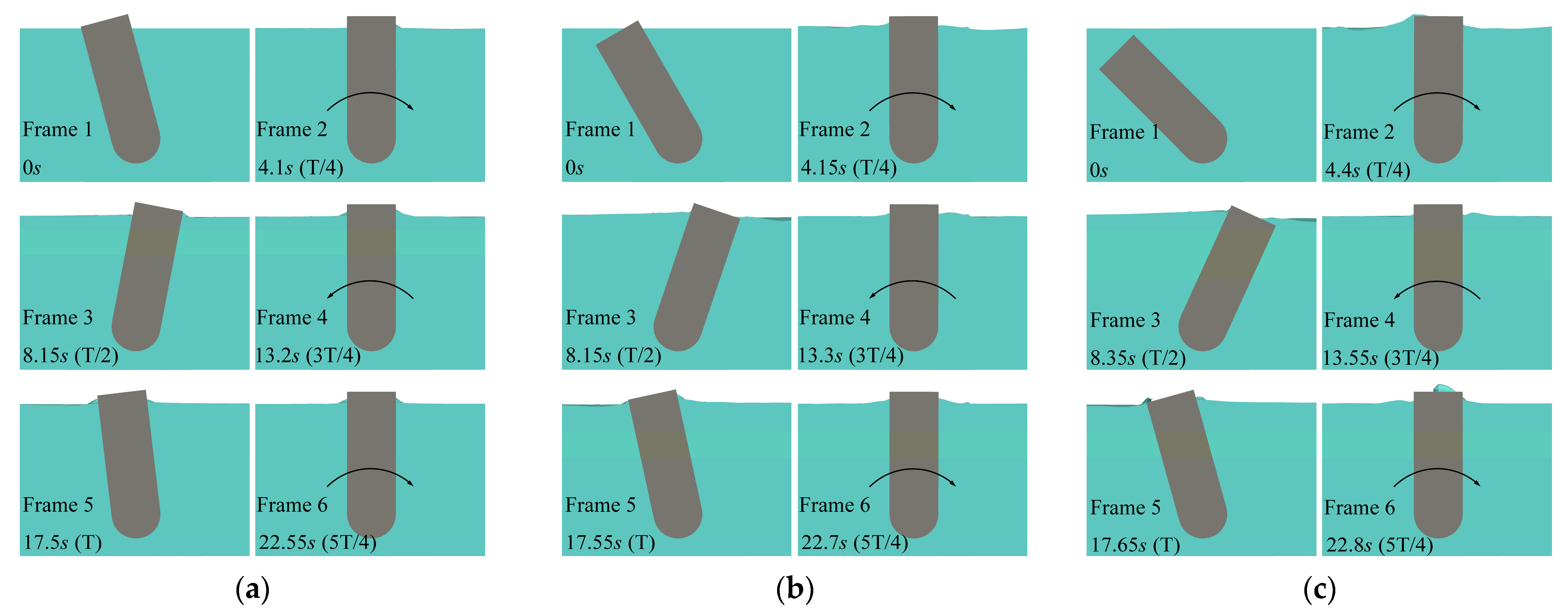
5. Free Decay Analysis
6. Under Regular Waves
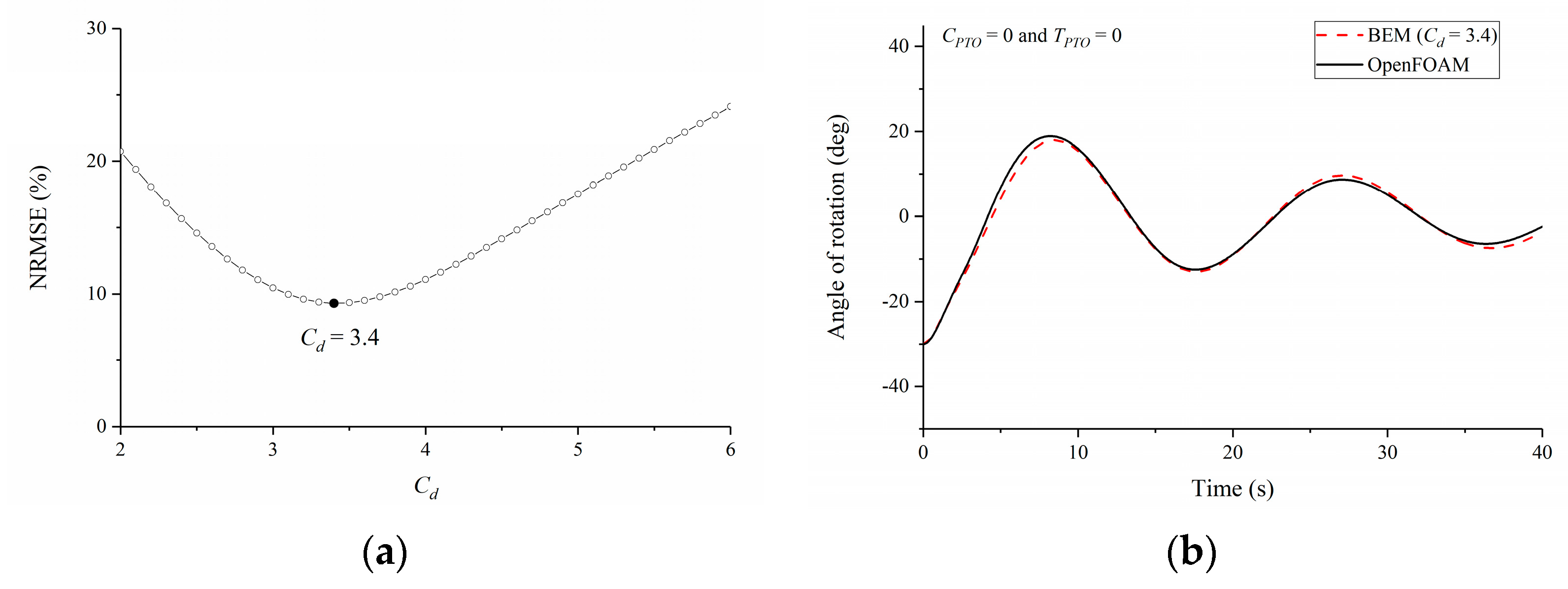
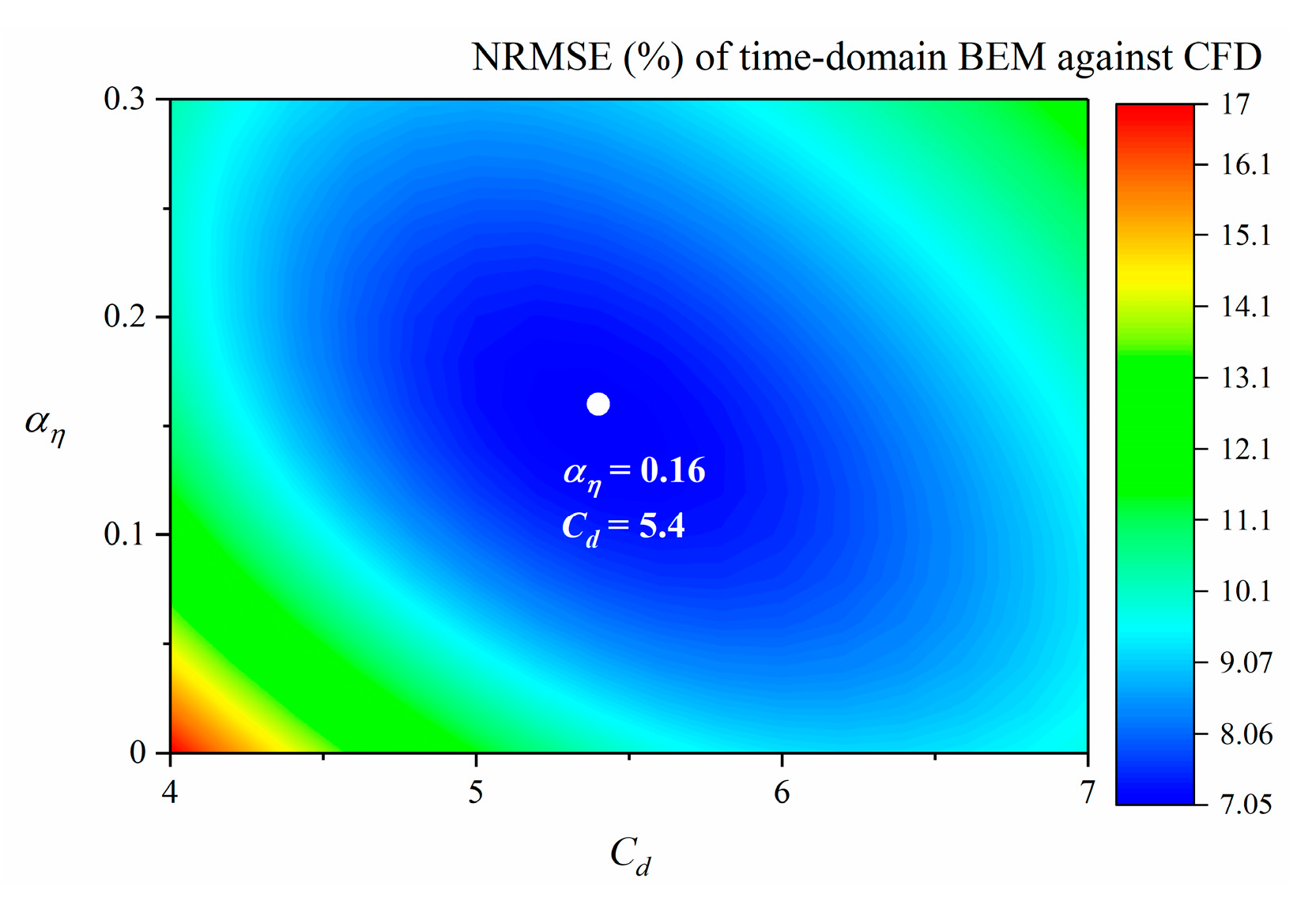
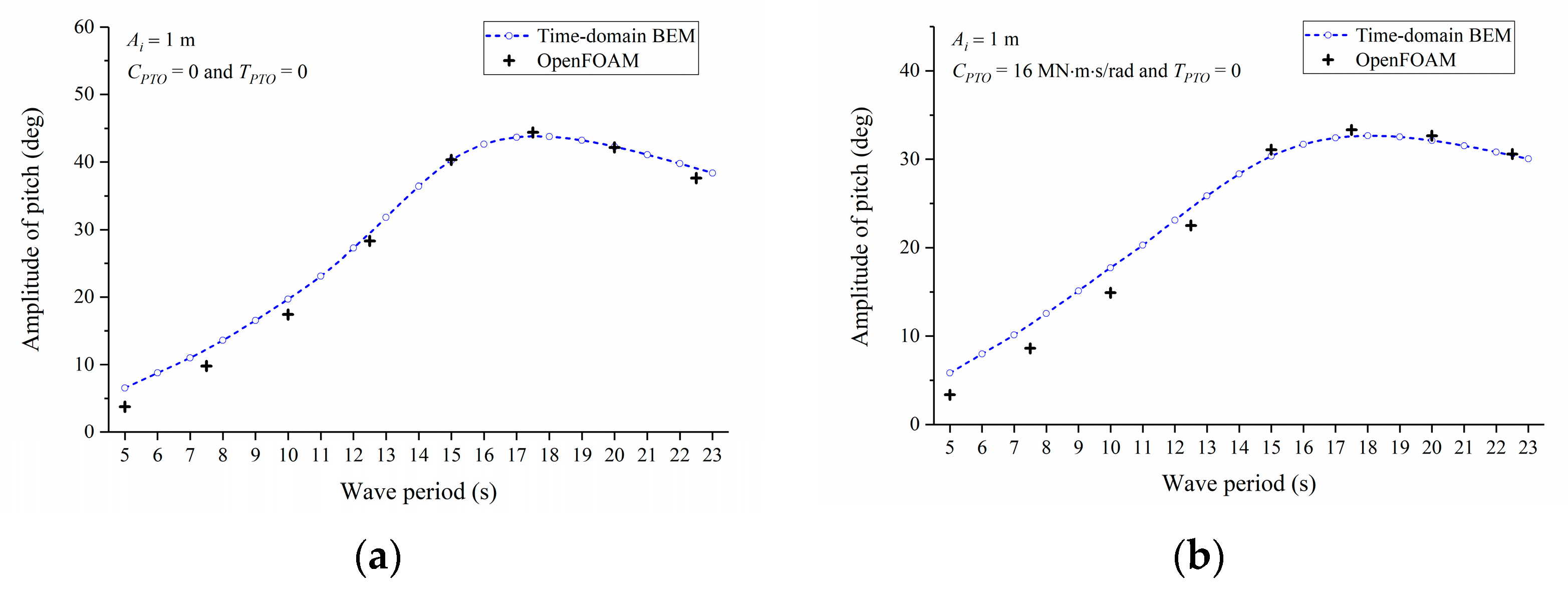
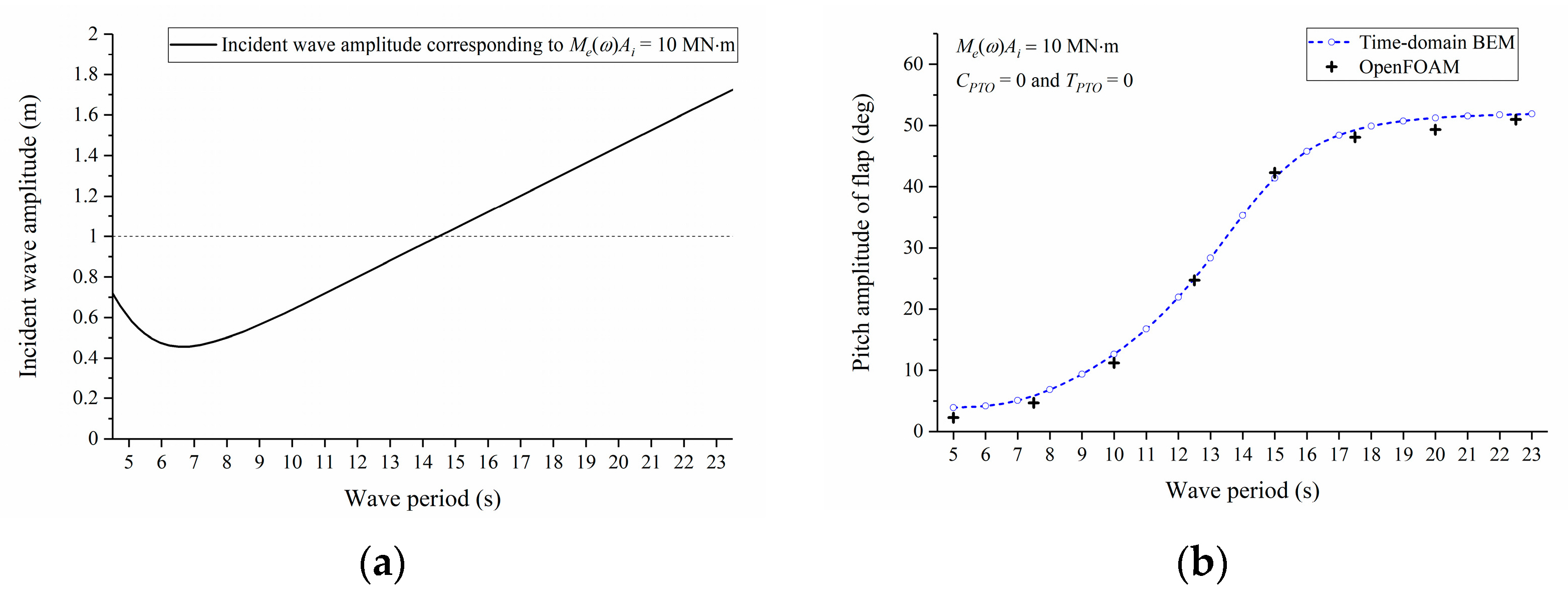
6.1. Calibration of BEM with CFD
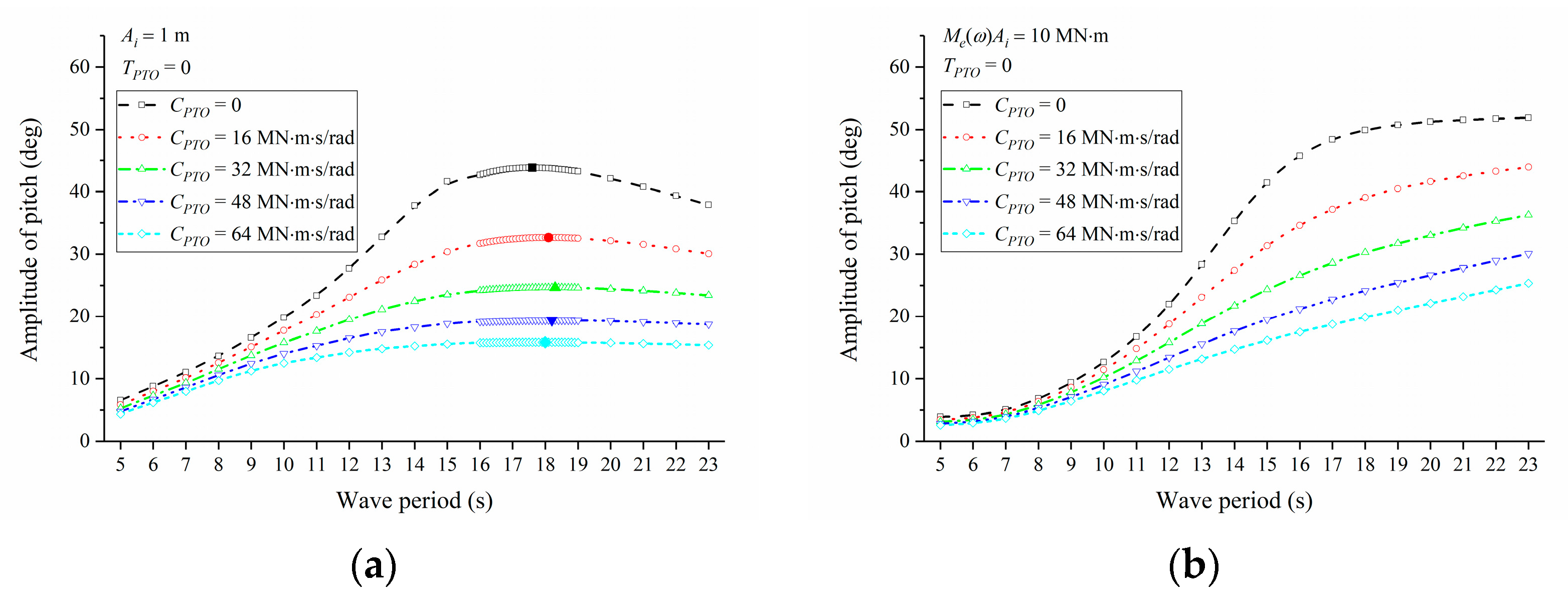
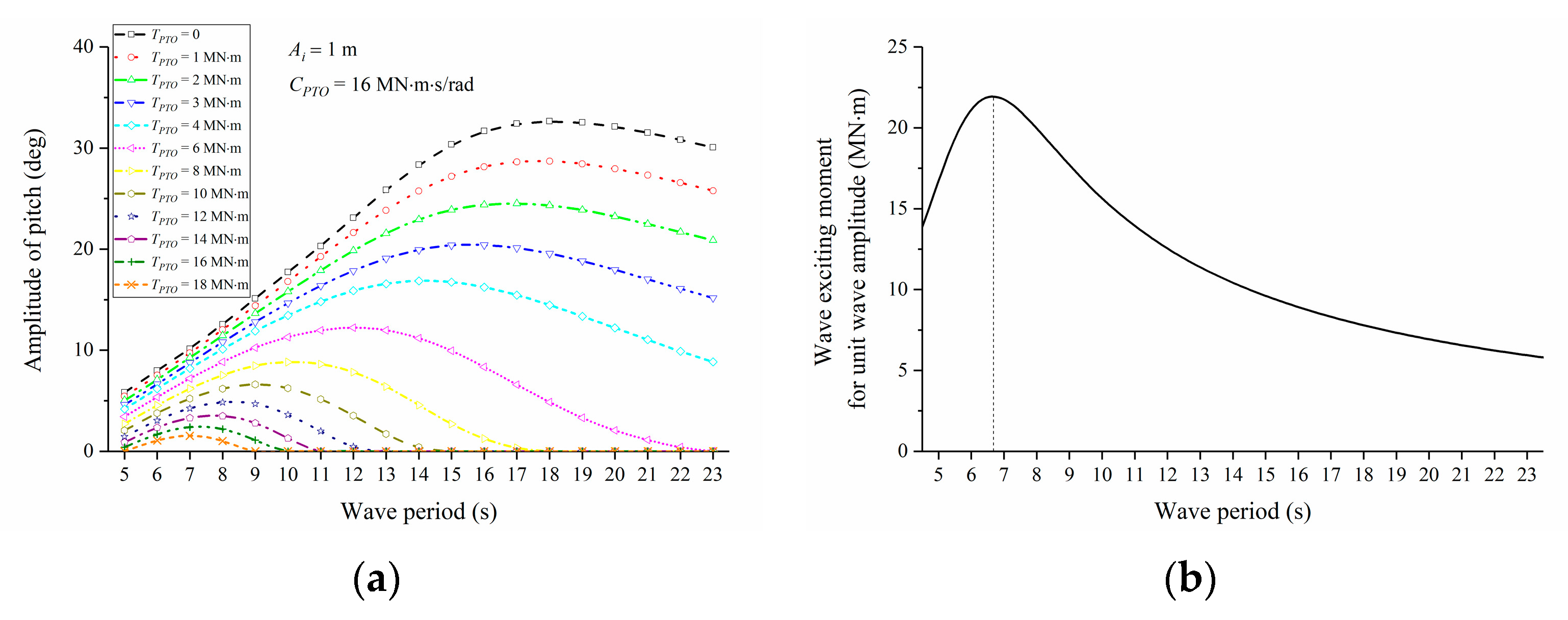
6.2. When Does the Maximum Pitch Occur?
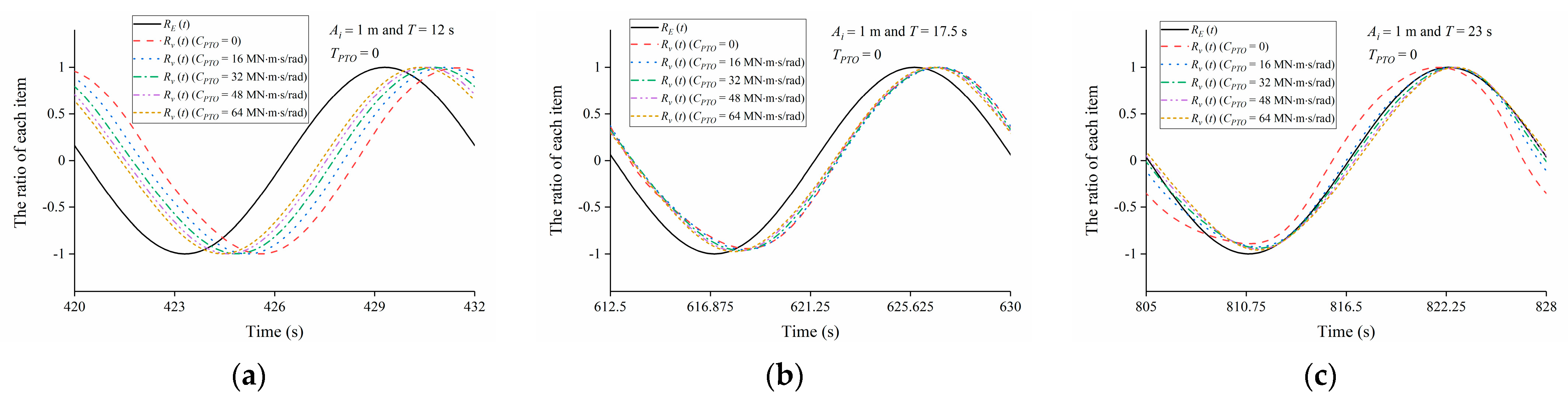
6.3. Phase Characteristics Near and Far from Resonance
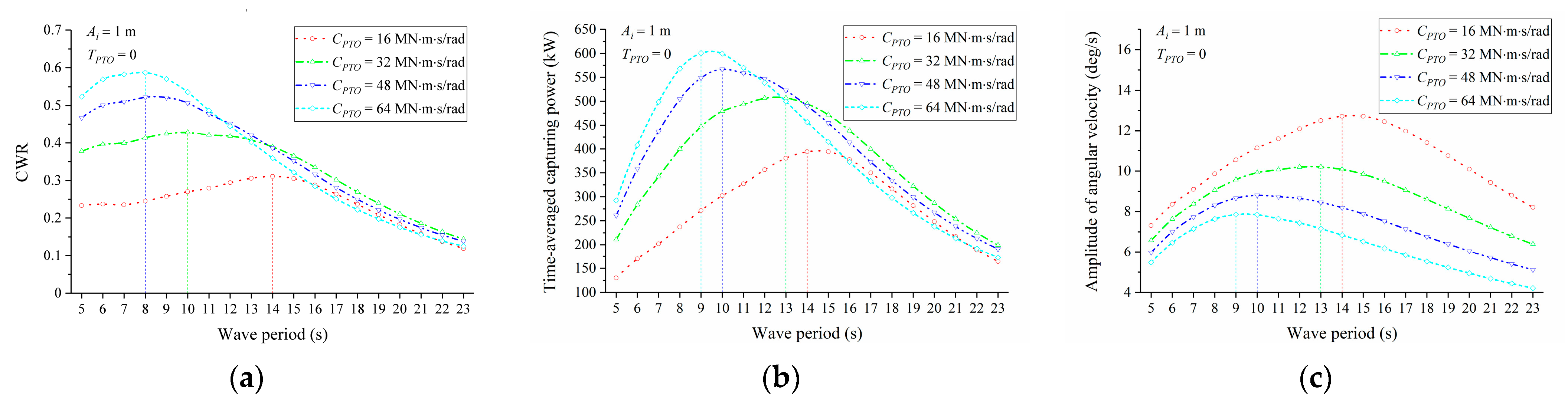
6.4. Relationship of Maximum CWR with Resonance
7. Under Irregular Waves
7.1. Wave Spectrum and Modification
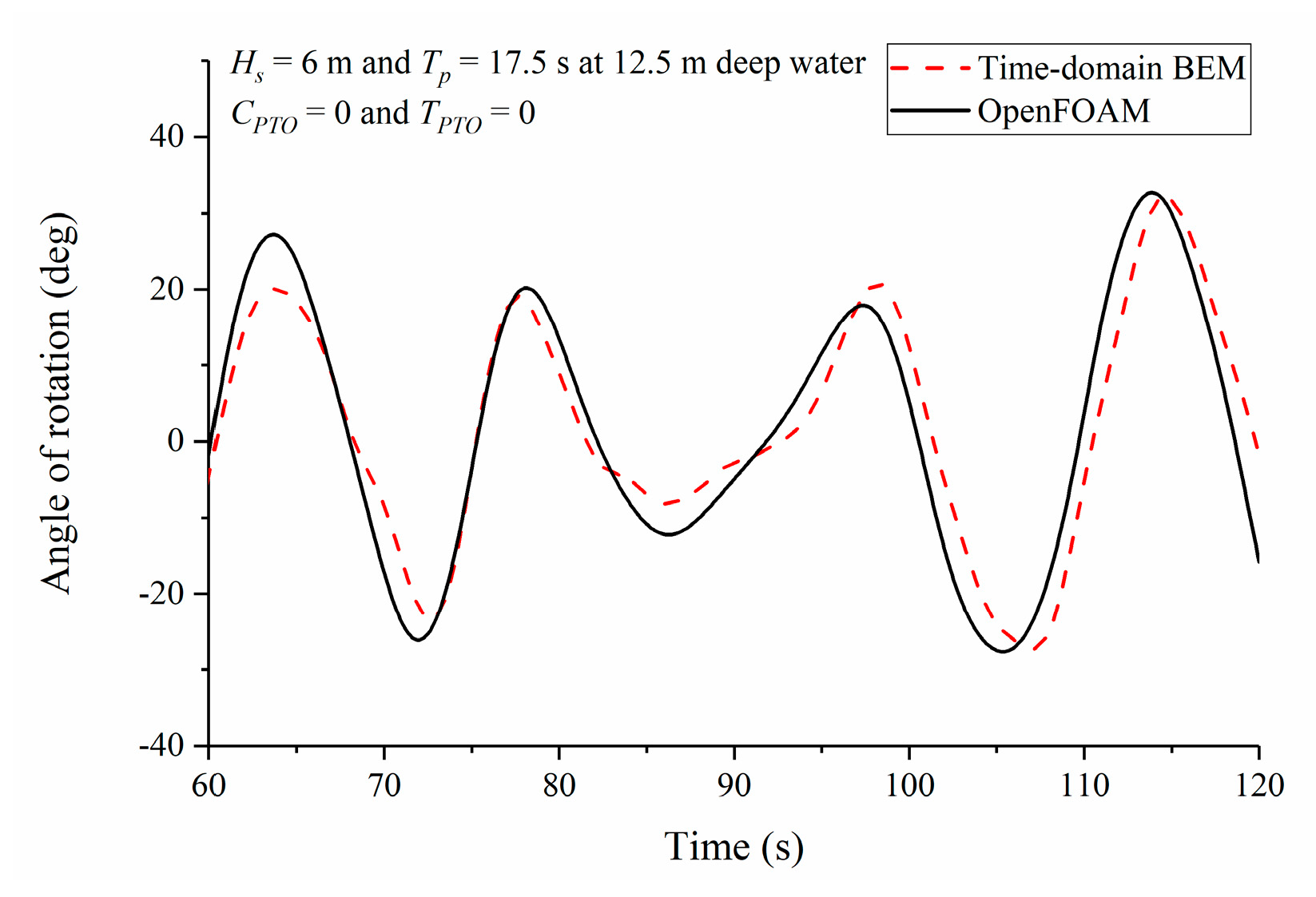
7.2. Validation of BEM against CFD
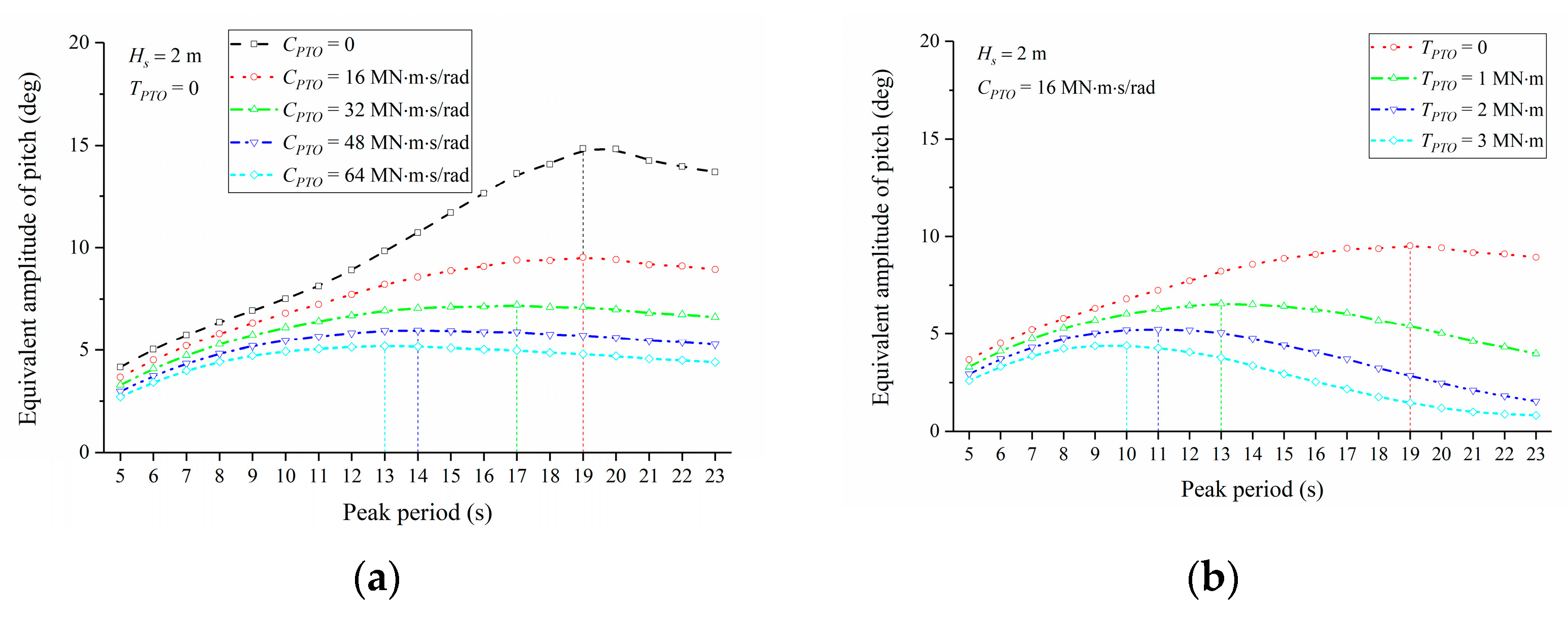
7.3. When Does the Maximum Equivalent Pitch Occur?
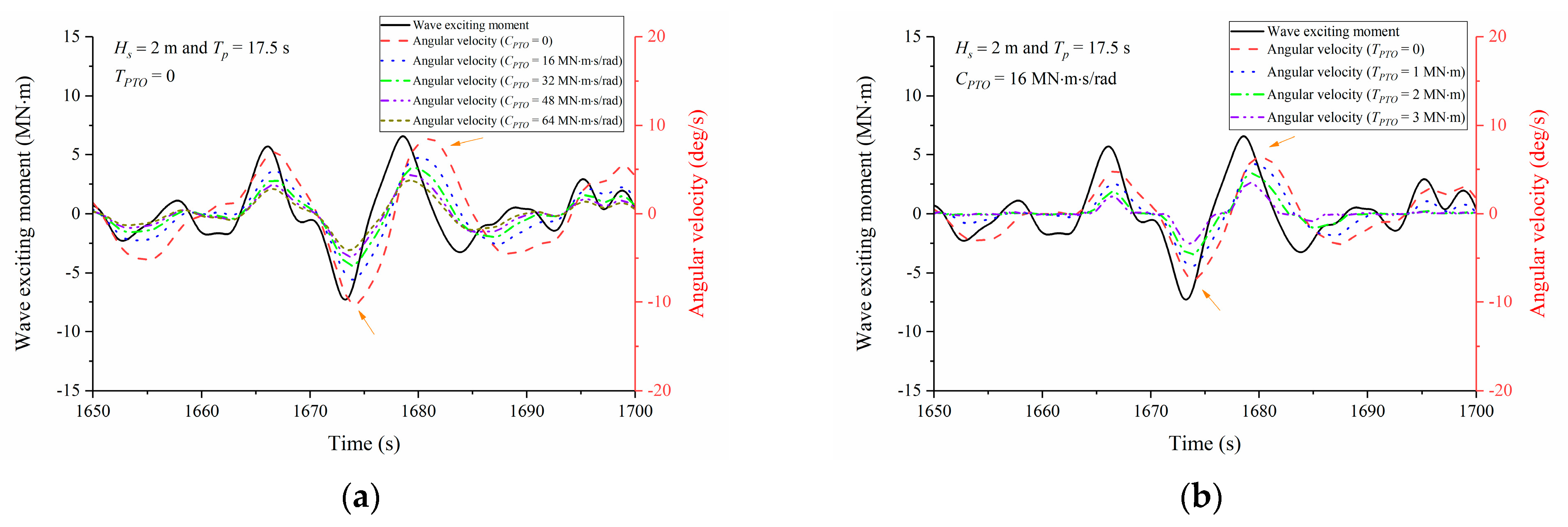
7.4. Phase Characteristics near the Natural Period
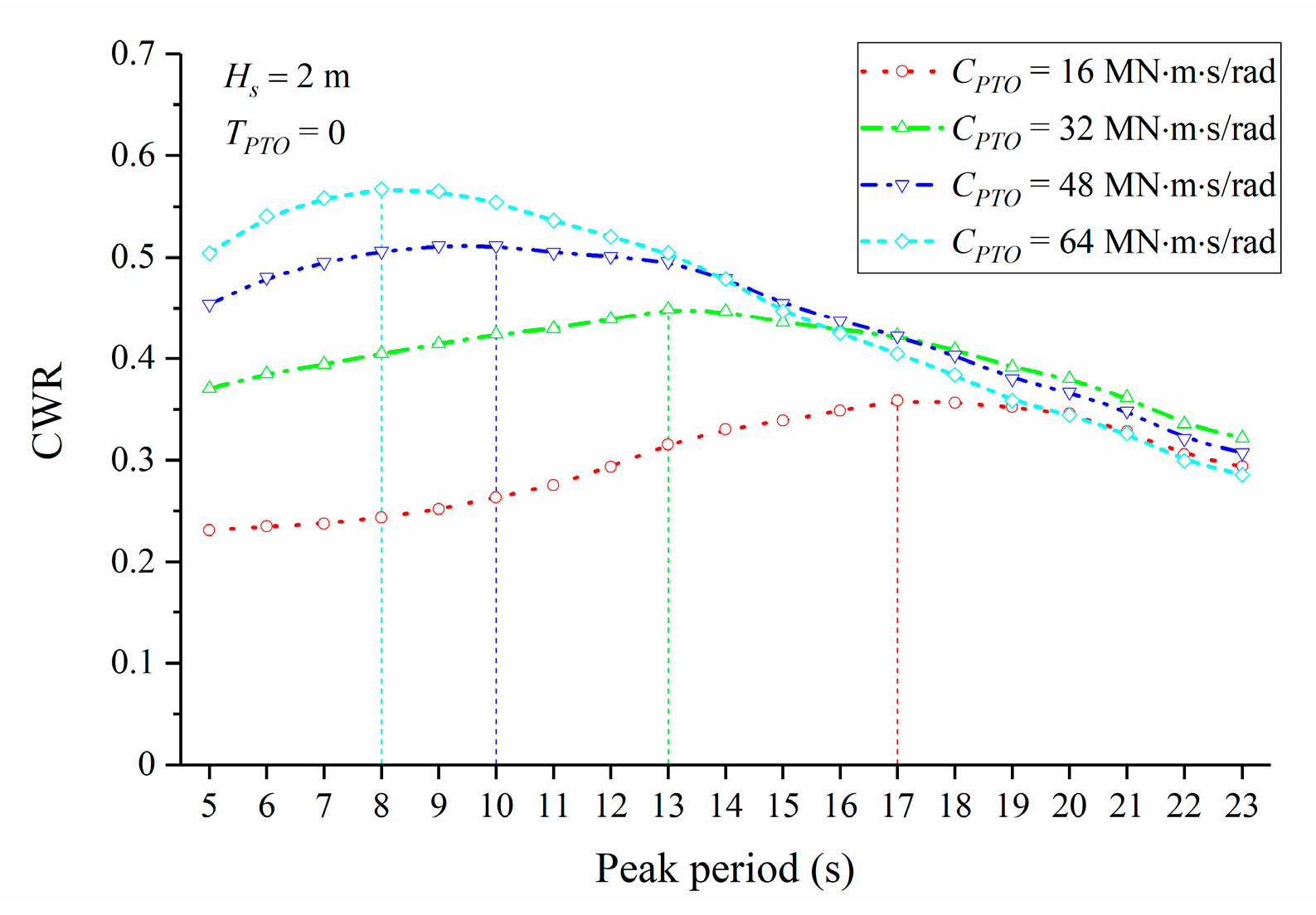
7.5. CWR vs. Peak Period
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Folley, M.; Whittaker, T.J.T.; Henry, A. The Effect of Water Depth on the Performance of a Small Surging Wave Energy Converter. Ocean Eng. 2007, 34, 1265–1274. [Google Scholar] [CrossRef]
- Budal, K.; Falnes, J. Wave Power Conversion by Point Absorbers: A Norwegian Project. Int. J. Ambient. Energy 1982, 3, 59–67. [Google Scholar] [CrossRef]
- Babarit, A.; Hals, J.; Muliawan, M.J.; Kurniawan, A.; Moan, T.; Krokstad, J. Numerical Benchmarking Study of a Selection of Wave Energy Converters. Renew. Energy 2012, 41, 44–63. [Google Scholar] [CrossRef]
- O’Boyle, L.; Doherty, K.; van’t Hoff, J.; Skelton, J. The Value of Full Scale Prototype Data-Testing Oyster 800 at Emec, Orkney. In Proceedings of the 11th European wave and tidal energy conference (EWTEC), Nantes, France, 6–11 September 2015; pp. 6–11. [Google Scholar]
- Brito, M.; Ferreira, R.M.L.; Teixeira, L.; Neves, M.G.; Canelas, R.B. Experimental Investigation on the Power Capture of an Oscillating Wave Surge Converter in Unidirectional Waves. Renew. Energy 2020, 151, 975–992. [Google Scholar] [CrossRef]
- Cho, Y.-H.; Nakamura, T.; Mizutani, N.; Lee, K.-H. An Experimental Study of a Bottom-Hinged Wave Energy Converter with a Reflection Wall in Regular Waves—Focusing on Behavioral Characteristics. Appl. Sci. 2020, 10, 6734. [Google Scholar] [CrossRef]
- Brito, M.; Ferreira, R.M.L.; Teixeira, L.; Neves, M.G.; Gil, L. Experimental Investigation of the Flow Field in the Vicinity of an Oscillating Wave Surge Converter. J. Mar. Sci. Eng. 2020, 8, 976. [Google Scholar] [CrossRef]
- Ning, D.; Liu, C.; Zhang, C.; Göteman, M.; Zhao, H.; Teng, B. Hydrodynamic Performance of an Oscillating Wave Surge Converter in Regular and Irregular Waves: An Experimental Study. J. Mar. Sci. Technol. 2017, 25, 4. [Google Scholar]
- Choiniere, M.A.; Tom, N.M.; Thiagarajan, K.P. Load Shedding Characteristics of an Oscillating Surge Wave Energy Converter with Variable Geometry. Ocean Eng. 2019, 186, 105982. [Google Scholar] [CrossRef]
- Schmitt, P.; Windt, C.; Nicholson, J.; Elsässer, B. Development and Validation of a Procedure for Numerical Vibration Analysis of an Oscillating Wave Surge Converter. Eur. J. Mech.-B/Fluids 2016, 58, 9–19. [Google Scholar] [CrossRef] [Green Version]
- Cummins, C.; Dias, F. A New Model of Viscous Dissipation for an Oscillating Wave Surge Converter. J. Eng. Math. 2017, 103, 195–216. [Google Scholar] [CrossRef] [Green Version]
- Magkouris, A.; Bonovas, M.; Belibassakis, K. Hydrodynamic Analysis of Surge-Type Wave Energy Devices in Variable Bathymetry by Means of BEM. Fluids 2020, 5, 99. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, G.; Ji, C.; Fan, T.; Zhai, G. Fully Nonlinear Investigations on Performance of an OWSC (Oscillating Wave Surge Converter) in 3D (Three-Dimensional) Open Water. Energy 2020, 210, 118526. [Google Scholar] [CrossRef]
- Galvin, C. Wave Breaking in Shallow Water. In Waves on Beaches and Resulting Sediment Transport; Elsevier: Amsterdam, The Netherlands, 1972; pp. 413–456. [Google Scholar]
- Maskell, E. Flow Separation in Three Dimensions. In RAE Report No. Aero 2565; Royal Aircraft Establishment: Farnborough, UK, 1955. [Google Scholar]
- King, R. A Review of Vortex Shedding Research and Its Application. Ocean Eng. 1977, 4, 141–171. [Google Scholar] [CrossRef]
- Wei, Y.; Abadie, T.; Henry, A.; Dias, F. Wave Interaction with an Oscillating Wave Surge Converter. Part II: Slamming. Ocean Eng. 2016, 113, 319–334. [Google Scholar] [CrossRef]
- Wei, Y.; Rafiee, A.; Henry, A.; Dias, F. Wave Interaction with an Oscillating Wave Surge Converter, Part I: Viscous Effects. Ocean Eng. 2015, 104, 185–203. [Google Scholar] [CrossRef]
- Schmitt, P.; Elsaesser, B. On the Use of OpenFOAM to Model Oscillating Wave Surge Converters. Ocean Eng. 2015, 108, 98–104. [Google Scholar] [CrossRef] [Green Version]
- Schmitt, P.; Asmuth, H.; Elsäßer, B. Optimising Power Take-off of an Oscillating Wave Surge Converter Using High Fidelity Numerical Simulations. Int. J. Mar. Energy 2016, 16, 196–208. [Google Scholar] [CrossRef] [Green Version]
- Windt, C.; Davidson, J.; Akram, B.; Ringwood, J.V. Performance Assessment of the Overset Grid Method for Numerical Wave Tank Experiments in the OpenFOAM Environment. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2018; Volume 51319, p. V010T09A006. [Google Scholar]
- Benites-Munoz, D.; Huang, L.; Anderlini, E.; Marín-Lopez, J.R.; Thomas, G. Hydrodynamic Modelling of An Oscillating Wave Surge Converter Including Power Take-Off. J. Mar. Sci. Eng. 2020, 8, 771. [Google Scholar] [CrossRef]
- Windt, C.; Davidson, J.; Ringwood, J.V. High-Fidelity Numerical Modelling of Ocean Wave Energy Systems: A Review of Computational Fluid Dynamics-Based Numerical Wave Tanks. Renew. Sustain. Energy Rev. 2018, 93, 610–630. [Google Scholar] [CrossRef] [Green Version]
- Monaghan, J.J. Simulating Free Surface Flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Zhang, D.H.; Shi, Y.X.; Huang, C.; Si, Y.L.; Huang, B.; Li, W. SPH Method with Applications of Oscillating Wave Surge Converter. Ocean Eng. 2018, 152, 273–285. [Google Scholar] [CrossRef]
- Brito, M.; Canelas, R.B.; García-Feal, O.; Domínguez, J.M.; Crespo, A.J.C.; Ferreira, R.M.L.; Neves, M.G.; Teixeira, L. A Numerical Tool for Modelling Oscillating Wave Surge Converter with Nonlinear Mechanical Constraints. Renew. Energy 2020, 146, 2024–2043. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Hua, X. Numerical Studies and Proposal of Design Equations on Cylindrical Oscillating Wave Surge Converters under Regular Waves Using SPH. Energy Convers. Manag. 2020, 203, 112242. [Google Scholar] [CrossRef]
- Penalba, M.; Giorgi, G.; Ringwood, J.V. Mathematical Modelling of Wave Energy Converters: A Review of Nonlinear Approaches. Renew. Sustain. Energy Rev. 2017, 78, 1188–1207. [Google Scholar] [CrossRef] [Green Version]
- Dias, F.; Renzi, E.; Gallagher, S.; Sarkar, D.; Wei, Y.; Abadie, T.; Cummins, C.; Rafiee, A. Analytical and Computational Modelling for Wave Energy Systems: The Example of Oscillating Wave Surge Converters. Acta Mech. Sin. 2017, 33, 647–662. [Google Scholar] [CrossRef] [Green Version]
- Anagnostopoulos, S.A. Dynamic Response of Offshore Platforms to Extreme Waves Including Fluid-Structure Interaction. Eng. Struct. 1982, 4, 179–185. [Google Scholar] [CrossRef]
- Istrati, D.; Buckle, I.G. Effect of Fluid-Structure Interaction on Connection Forces in Bridges Due to Tsunami Loads. In Proceedings of the 30th US-Japan Bridge Engineering Workshop, Washington, DC, USA, 21–24 October 2014. [Google Scholar]
- Choi, S.-J.; Lee, K.-H.; Gudmestad, O.T. The Effect of Dynamic Amplification Due to a Structure’s Vibration on Breaking Wave Impact. Ocean Eng. 2015, 96, 8–20. [Google Scholar] [CrossRef]
- Falcão, A.F.D.O. Wave Energy Utilization: A Review of the Technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Korde, U.A. Efficient Primary Energy Conversion in Irregular Waves. Ocean Eng. 1999, 26, 625–651. [Google Scholar] [CrossRef]
- Renzi, E.; Dias, F. Resonant Behaviour of an Oscillating Wave Energy Converter in a Channel. J. Fluid Mech. 2012, 701, 482–510. [Google Scholar] [CrossRef] [Green Version]
- Sarkar, D.; Renzi, E.; Dias, F. Effect of a Straight Coast on the Hydrodynamics and Performance of the Oscillating Wave Surge Converter. Ocean Eng. 2015, 105, 25–32. [Google Scholar] [CrossRef] [Green Version]
- Van der Meer, J.W.; Briganti, R.; Zanuttigh, B.; Wang, B. Wave Transmission and Reflection at Low-Crested Structures: Design Formulae, Oblique Wave Attack and Spectral Change. Coast. Eng. 2005, 52, 915–929. [Google Scholar] [CrossRef]
- Van der Werf, I.; van Gent, M. Wave Overtopping over Coastal Structures with Oblique Wind and Swell Waves. J. Mar. Sci. Eng. 2018, 6, 149. [Google Scholar] [CrossRef] [Green Version]
- Istrati, D.; Buckle, I.G. Tsunami Loads on Straight and Skewed Bridges—Part 2: Numerical Investigation and Design Recommendations; No. FHWA-OR-RD-21-13; Department of Transportation. Research Section: Salem, OR, USA, 2021.
- Cummins, W.E. The Impulse Response Function and Ship Motions; AD0288277; DTIC: Washington, DC, USA, 1962; pp. 101–109.
- Jefferys, E.R. Simulation of Wave Power Devices. Appl. Ocean Res. 1984, 6, 31–39. [Google Scholar] [CrossRef]
- Morison, J.; Johnson, J.; Schaaf, S. The Force Exerted by Surface Waves on Piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Newman, J. Marine Hydrodynamics; MIT Press: Cambridge, MA, USA, 1977; pp. 253–256. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of Fluid (VOF) Method for the Dynamics of Free Boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Finnegan, W.; Goggins, J. Numerical Simulation of Linear Water Waves and Wave–Structure Interaction. Ocean Eng. 2012, 43, 23–31. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Dolguntseva, I.; Savin, A.; Zhang, Y.; Li, W.; Svensson, O.; Leijon, M. Numerical Modelling of a Point-Absorbing Wave Energy Converter in Irregular and Extreme Waves. Appl. Ocean Res. 2017, 63, 90–105. [Google Scholar] [CrossRef]
- Issa, R.I. Solution of the Implicitly Discretised Fluid Flow Equations by Operator-Splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Ferziger, J.H.; Perić, M.; Street, R.L. Computational Methods for Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2002; Volume 3, pp. 196–200. [Google Scholar]
- ESI OpenCFD Releases OpenFOAM v1912. Available online: https://www.openfoam.com/news/main-news/openfoam-v1912 (accessed on 13 December 2021).
- Renzi, E.; Dias, F. Mathematical Modelling of a Flap-Type Wave Energy Converter. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Nantes, France, 9–4 July 2013; American Society of Mechanical Engineers: New York, NY, USA, 2013; Volume 55430, p. V009T12A005. [Google Scholar]
- Tay, Z.Y.; Venugopal, V. Hydrodynamic Interactions of Oscillating Wave Surge Converters in an Array under Random Sea State. Ocean Eng. 2017, 145, 382–394. [Google Scholar] [CrossRef] [Green Version]
- Tisovska, P. Description of the overset mesh approach in ESI version of OpenFOAM. In Proceedings of the CFD with OpenSource Software; Nilsson, H., Ed.; Chalmers University of Technology: Gothenburg, Sweden, 2019. [Google Scholar]
- Causon, D.M.; Ingram, D.M.; Mingham, C.G.; Yang, G.; Pearson, R.V. Calculation of Shallow Water Flows Using a Cartesian Cut Cell Approach. Adv. Water Resour. 2000, 23, 545–562. [Google Scholar] [CrossRef]
- Schmitt, P.; Bourdier, S.; Whittaker, T.; Sarkar, D.; Renzi, E.; Dias, F.; Doherty, K.; van’t Hoff, J. Hydrodynamic Loading on a Bottom Hinged Oscillating Wave Surge Converter. In Proceedings of the Twenty-Second International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012; International Society of Offshore and Polar Engineers: Cupertino, CA, USA, 2012. [Google Scholar]
- Sarpkaya, T. Vortex Shedding and Resistance in Harmonic Flow about Smooth and Rough Circular Cylinders at High Reynolds Numbers; Technical Report; Naval Postgraduate School: Monterey, CA, USA, 1976. [Google Scholar]
- Goda, Y. Statistical Variability of Sea State Parameters as a Function of Wave Spectrum. Coast. Eng. Jpn. 1988, 31, 39–52. [Google Scholar] [CrossRef]
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of Wind-Wave Growth and Swell Decay during the Joint North Sea Wave Project (JONSWAP); Deutsches Hydrographisches Institut: Berlin/Hamburg, Germany, 1973. [Google Scholar]
- Kitaigordskii, S.A.; Krasitskii, V.P.; Zaslavskii, M.M. On Phillips’ Theory of Equilibrium Range in the Spectra of Wind-Generated Gravity Waves. J. Phys. Oceanogr. 1975, 5, 410–420. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase Angle of | Value |
|---|---|
| Incident wave elevation at | |
| Wave exciting moment relative to incident wave elevation | |
| Angular velocity relative to wave exciting moment | |
| Pitch angle relative to wave exciting moment | |
| Pitch angle |
| Mesh | Mean Cell Size (m) | # of Wet Surface Cells above the Hinge | # of Divisions on the Bottom Round | # of Cells | Computational Cost |
|---|---|---|---|---|---|
| Coarse | ≈0.45 | 16 × 52 × 23 | 12 | 3.9K | |
| Medium | ≈0.35 | 20 × 65 × 30 | 16 | 6.4K | |
| Fine | ≈0.3 | 24 × 75 × 35 | 20 | 8.8K |
| Mesh | Main Zone | Overset Zone | Total # of Cells | Computational Cost | ||||
|---|---|---|---|---|---|---|---|---|
| # of Water Surface | # of Top & Bottom | # of Cells | # of Flap Surface above Hinge | # of Divisions on Flap Rounds | ||||
| Coarse | 468 × 140 | 117 × 35 | 0.94M | 12 × 24 × 19 | 16 | 34.1K | 0.98M | |
| Medium | 636 × 192 | 159 × 48 | 1.96M | 16 × 33 × 26 | 20 | 58.7K | 2.02M | |
| Fine | 868 × 264 | 217 × 66 | 3.83M | 20 × 44 × 34 | 24 | 88.5K | 3.92M | |
| The Periods of Max. | Difference of the Peak Periods | |||||
|---|---|---|---|---|---|---|
| CWR | ||||||
| 16 | 18.1 s | 14 s | 14 s | 14 s | 22.65% | 0 |
| 32 | 18.3 s | 10 s | 13 s | 13 s | 45.36% | 23.08% |
| 48 | 18.2 s | 8 s | 10 s | 10 s | 56.04% | 20.00% |
| 64 | 18 s | 8 s | 9 s | 9 s | 55.56% | 11.11% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Cho, Y.-H.; Mizutani, N.; Nakamura, T. Study on the Resonant Behaviors of a Bottom-Hinged Oscillating Wave Surge Converter. J. Mar. Sci. Eng. 2022, 10, 2. https://doi.org/10.3390/jmse10010002
Liu Y, Cho Y-H, Mizutani N, Nakamura T. Study on the Resonant Behaviors of a Bottom-Hinged Oscillating Wave Surge Converter. Journal of Marine Science and Engineering. 2022; 10(1):2. https://doi.org/10.3390/jmse10010002
Chicago/Turabian StyleLiu, Yao, Yong-Hwan Cho, Norimi Mizutani, and Tomoaki Nakamura. 2022. "Study on the Resonant Behaviors of a Bottom-Hinged Oscillating Wave Surge Converter" Journal of Marine Science and Engineering 10, no. 1: 2. https://doi.org/10.3390/jmse10010002
APA StyleLiu, Y., Cho, Y.-H., Mizutani, N., & Nakamura, T. (2022). Study on the Resonant Behaviors of a Bottom-Hinged Oscillating Wave Surge Converter. Journal of Marine Science and Engineering, 10(1), 2. https://doi.org/10.3390/jmse10010002