
Developing an Uncrewed Aerial Vehicle (UAV)-Based Prediction Model for the Rice Harvest Index Using Machine Learning

 , , ,
, , ,
Abstract
1. Introduction
2. Materials and Methods
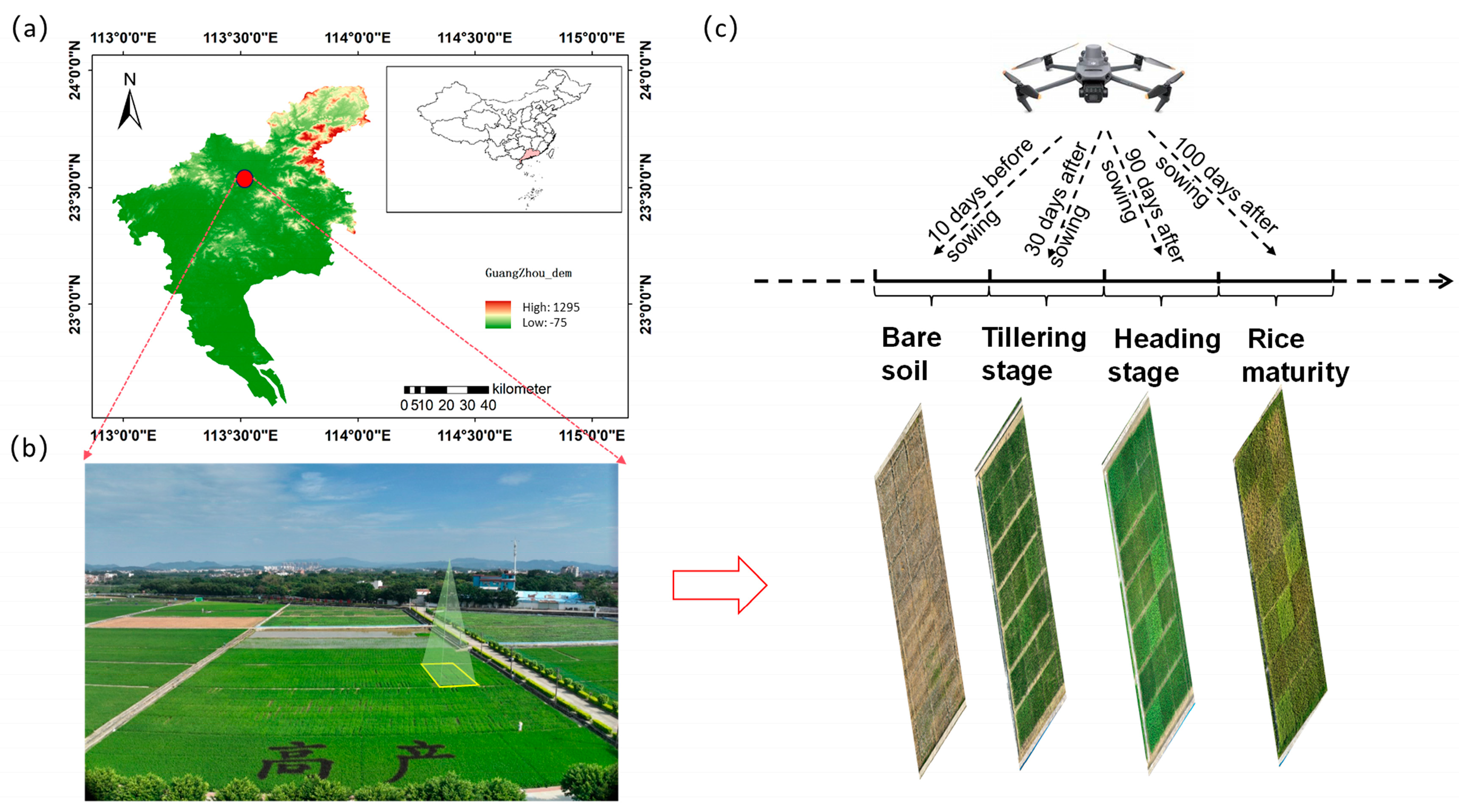
2.1. Experimental Design
2.1.1. Overview of the Experimental Area and Soil Characteristics
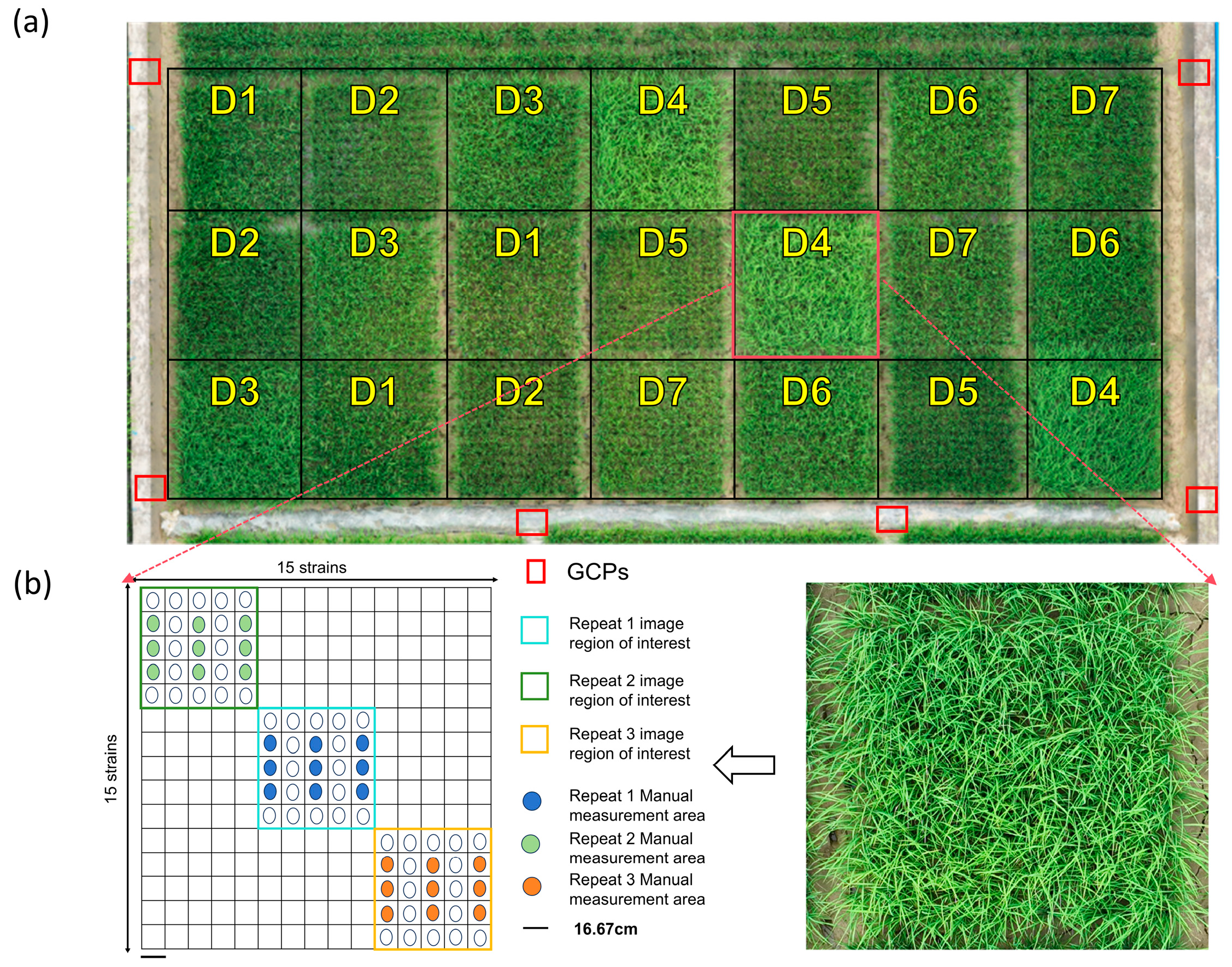
2.1.2. Test Materials and Layout
2.2. Data Acquisition System
2.2.1. UAV Platform and Sensor Configuration
2.2.2. Data Collection
2.3. Data Processing and Analysis
2.3.1. Image Preprocessing
2.3.2. Feature Extraction and Calculation
Plant Height Information Extraction
Spectral Feature Calculation
2.4. Ground Data Collection
2.4.1. Determination of Agronomic Traits of Plant Height
2.4.2. Harvest Index Determination
2.5. Data Analysis and Modeling
2.5.1. Data Preprocessing
2.5.2. Feature Selection and Optimization
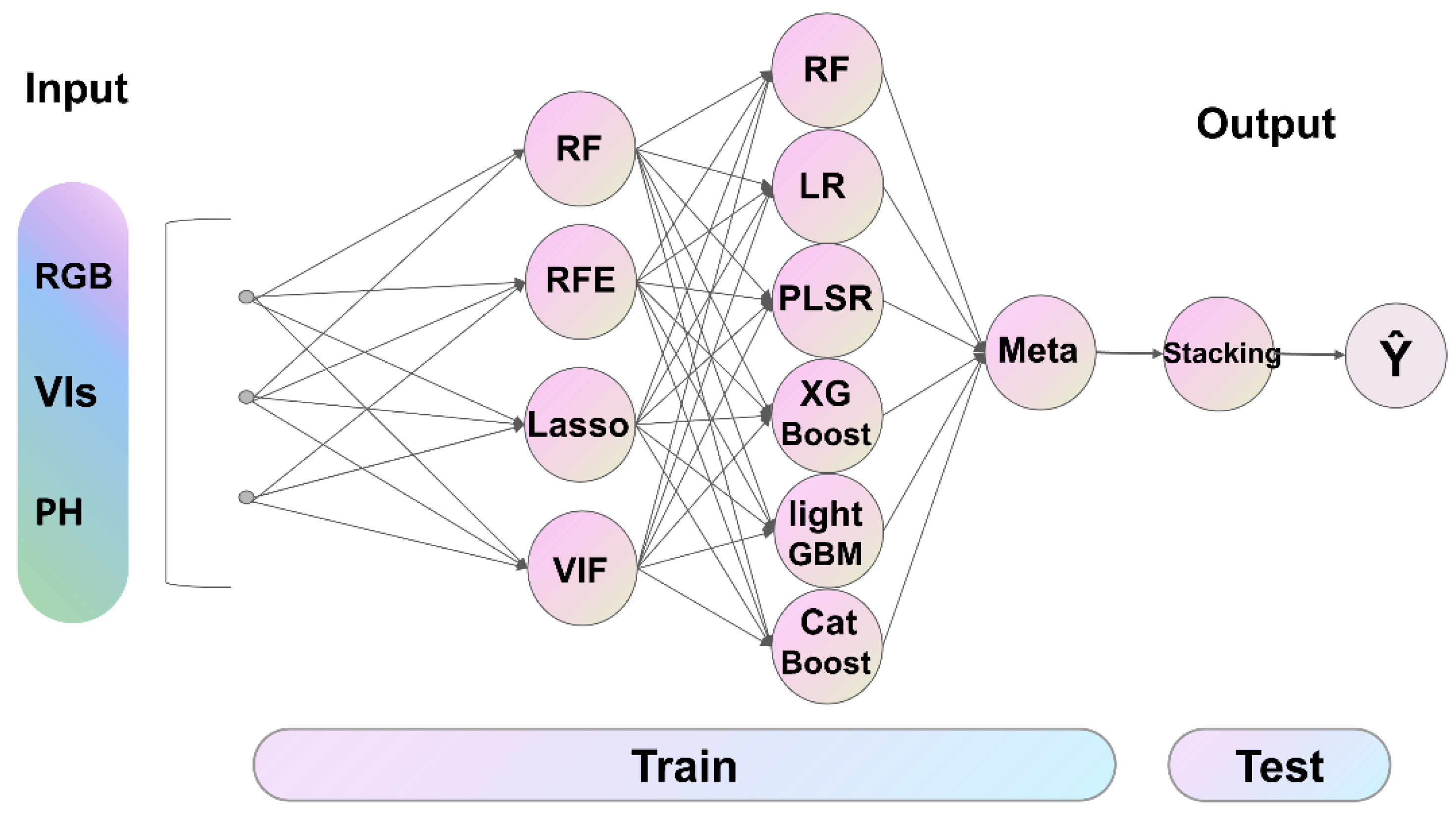
2.5.3. Model Construction and Integration
2.5.4. Model Evaluation Methods
3. Results
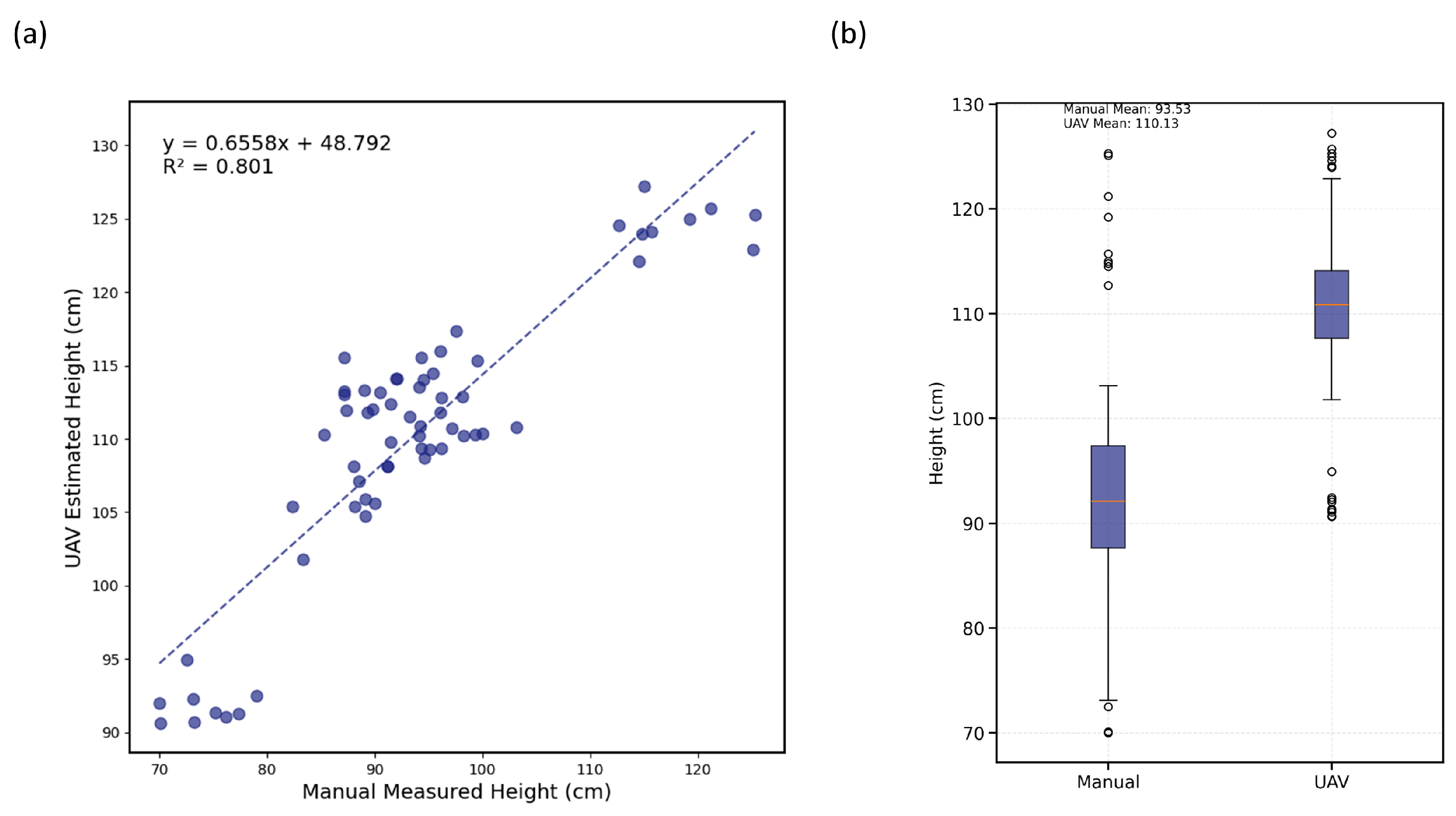
3.1. Verification of Plant Height Estimation Accuracy Using UAV Remote Sensing
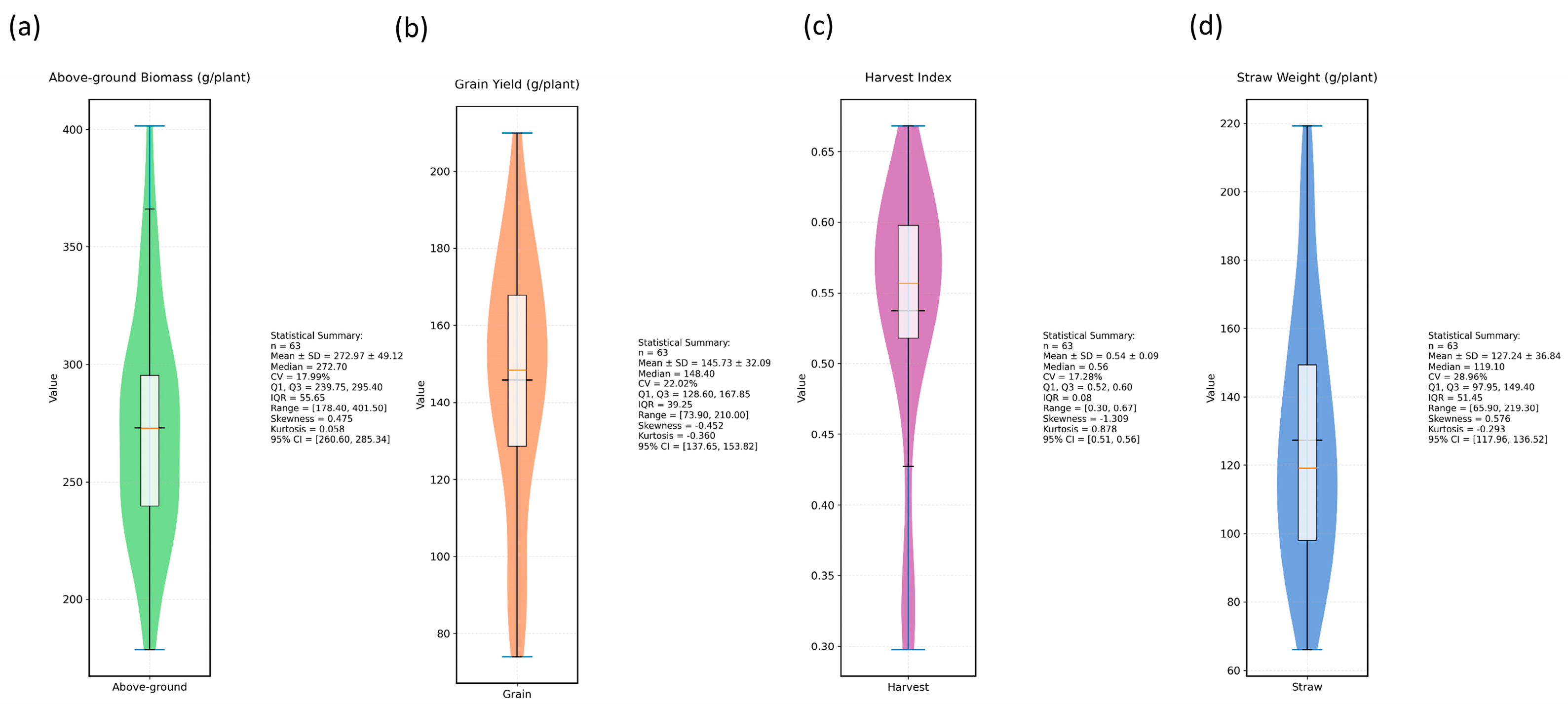
3.2. Analysis of Ground Data Harvest Index Verification
3.3. Evaluation of Machine Learning Model Prediction Performance
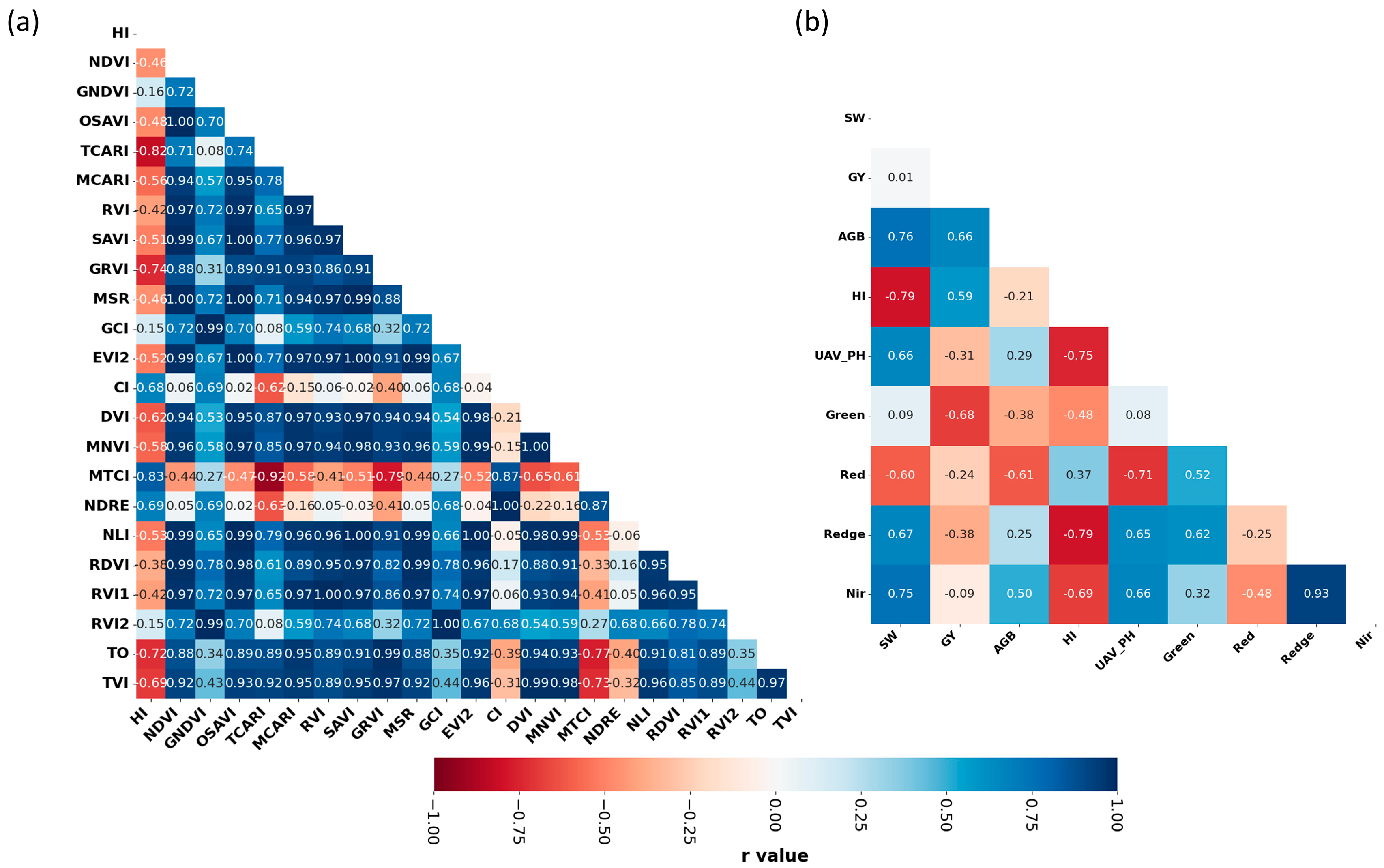
3.4. Correlation Analysis Between the Spectral Index and Harvest Index
4. Discussion
4.1. Importance of Spectral Index to Harvest Index Prediction Model
4.2. Small Sample Learning and Feature Parameter Optimization
4.3. Research Limitations and Future Directions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khush, G.S. What it will take to Feed 5.0 Billion Rice consumers in 2030. Plant Mol. Biol. 2005, 59, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Zhang, L.; Liu, W.; Wang, X.; Wu, H.; Chen, H.; Chen, T.; Lu, Z.; He, X. Two-year QTL dissecting of high harvest index and related traits in a novel rice variety Yuenongsimaio. Curr. Plant Biol. 2025, 42, 100475. [Google Scholar] [CrossRef]
- Peng, S.; Khush, G.; Cassman, K. Evolution of the new plant ideotype for increased yield potential. In Proceedings of the Breaking the Yield Barrier: Proceedings of the Workshop on Rice Yield Potential in Favourable Environments, Los Banos, Philippines, 29 November–4 December 1994; pp. 5–20. [Google Scholar]
- He, X.; Liao, Y.; Chen, Z.; Chen, S. Study on photosynthate’s transport and distribution characteristics in Yuexiangzhan, a rice variety with a high harvest index. J. South China Agric. Univ. 2000, 3, 5–8. [Google Scholar]
- Xue, J.; Su, B. Significant remote sensing vegetation indices: A review of developments and applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Maimaitiyiming, M.; Hartling, S.; Peterson, K.T.; Maw, M.J.; Shakoor, N.; Mockler, T.; Fritschi, F.; et al. Vegetation index weighted canopy volume model (CVMVI) for soybean biomass estimation from unmanned aerial system-based RGB imagery. ISPRS J. Photogramm. Remote Sens. 2019, 151, 27–41. [Google Scholar] [CrossRef]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- İrik, H.A.; Ropelewska, E.; Çetin, N. Using spectral vegetation indices and machine learning models for predicting the yield of sugar beet (Beta vulgaris L.) under different irrigation treatments. Comput. Electron. Agric. 2024, 221, 109019. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Fass, E.; Shlomi, E.; Ziv, C.; Glickman, O.; Helman, D. Machine learning models based on hyperspectral imaging for pre-harvest tomato fruit quality monitoring. Comput. Electron. Agric. 2025, 229, 109788. [Google Scholar] [CrossRef]
- Zhou, Z.-H. Ensemble Methods: Foundations and Algorithms; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Zhou, X.; Zheng, H.; Xu, X.; He, J.; Ge, X.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.; Tian, Y.; et al. Predicting grain yield in rice using multi-temporal vegetation indices from UAV-based multispectral and digital imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 246–255. [Google Scholar] [CrossRef]
- Jay, S.; Baret, F.; Dutartre, D.; Malatesta, G.; Héno, S.; Comar, A.; Weiss, M.; Maupas, F. Exploiting the centimeter resolution of UAV multispectral imagery to improve remote-sensing estimates of canopy structure and biochemistry in sugar beet crops. Remote Sens. Environ. 2019, 231, 110898. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Deering, D.W.; Schell, J.A.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation. In Earth Resources And Remote Sensing; NASA/GSFCT Type III Final Report. No. E75-10354; Texas A&M University: College Station, TX, USA, 1974. [Google Scholar]
- Pearson, R.L.; Miller, L.D. Remote mapping of standing crop biomass for estimation of the productivity of the shortgrass prairie, Pawnee National Grasslands, Colorado. In Proceedings of the Eighth International Symposium on Remote Sensing of Environment, Ann Arbor, MI, USA, 2–6 October 1972. [Google Scholar]
- Vescovo, L.; Gianelle, D. Using the MIR bands in vegetation indices for the estimation of grassland biophysical parameters from satellite remote sensing in the Alps region of Trentino (Italy). Adv. Space Res. 2008, 41, 1764–1772. [Google Scholar] [CrossRef]
- Ju, C.-H.; Tian, Y.-C.; Yao, X.; Cao, W.-X.; Zhu, Y.; Hannaway, D. Estimating Leaf Chlorophyll Content Using Red Edge Parameters. Pedosphere 2010, 20, 633–644. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Im, J.; Jensen, J.R. Hyperspectral Remote Sensing of Vegetation. Geogr. Compass 2008, 2, 1943–1961. [Google Scholar] [CrossRef]
- Chen, J.M.; Cihlar, J. Retrieving leaf area index of boreal conifer forests using Landsat TM images. Remote Sens. Environ. 1996, 55, 153–162. [Google Scholar] [CrossRef]
- Zhang, X.; Friedl, M.A.; Schaaf, C.B.; Strahler, A.H.; Hodges, J.C.F.; Gao, F.; Reed, B.C.; Huete, A. Monitoring vegetation phenology using MODIS. Remote Sens. Environ. 2003, 84, 471–475. [Google Scholar] [CrossRef]
- Jhorar, R.K.; Smit, A.; Roest, C.W.J. Assessment of alternative water management options for irrigated agriculture. Agric. Water Manag. 2009, 96, 975–981. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; De Colstoun, E.B.; McMurtrey Iii, J.E. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Dash, J.; Curran, P.J. The MERIS terrestrial chlorophyll index. Int. J. Remote Sens. 2004, 25, 5403–5413. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N.J. Remote estimation of chlorophyll content in higher plant leaves. Int. J. Remote Sens. 1997, 18, 2691–2697. [Google Scholar] [CrossRef]
- Kvålseth, T.O. Cautionary Note about R 2. Am. Stat. 1985, 39, 279–285. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R.J. Root mean square error (RMSE) or mean absolute error (MAE)?–Arguments against avoiding RMSE in the literature. Geosci. Model Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.J. Grain filling of cereals under soil drying. New Phytol. 2006, 169, 223–236. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Spectral Reflectance Changes Associated with Autumn Senescence of Aesculus hippocastanum L. and Acer platanoides L. Leaves. Spectral Features and Relation to Chlorophyll Estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Hansen, P.; Schjoerring, J.J. Reflectance measurement of canopy biomass and nitrogen status in wheat crops using normalized difference vegetation indices and partial least squares regression. Remote Sens. Environ. 2003, 86, 542–553. [Google Scholar] [CrossRef]
- Horler, D.; Dockray, M.; Barber, J.J. The red edge of plant leaf reflectance. Int. J. Remote Sens. 1983, 4, 273–288. [Google Scholar] [CrossRef]
- Cao, Q.; Miao, Y.; Wang, H.; Huang, S.; Cheng, S.; Khosla, R.; Jiang, R. Non-destructive estimation of rice plant nitrogen status with Crop Circle multispectral active canopy sensor. Field Crops Res. 2013, 154, 133–144. [Google Scholar] [CrossRef]
- Yoshida, S.; Cock, J.; Parao, F. Physiological Aspects of High Yields. Annu. Rev. Plant Physiol. 1972, 23, 437–464. [Google Scholar] [CrossRef]
- Zhang, H.; Tan, G.; Yang, L.; Yang, J.; Zhang, J.; Zhao, B.J. Hormones in the grains and roots in relation to post-anthesis development of inferior and superior spikelets in japonica/indica hybrid rice. Plant Physiol. Biochem. 2009, 47, 195–204. [Google Scholar] [CrossRef]
- Lundberg, S.M.; Lee, S.I. A unified approach to interpreting model predictions. Adv. Neural Inf. Process. Syst. 2017, 30, 4768–4777. [Google Scholar]
- Ma, L.; Fu, T.; Blaschke, T.; Li, M.; Tiede, D.; Zhou, Z.; Ma, X.; Chen, D.J. Evaluation of feature selection methods for object-based land cover mapping of unmanned aerial vehicle imagery using random forest and support vector machine classifiers. ISPRS Int. J. Geo-Inf. 2017, 6, 51. [Google Scholar] [CrossRef]
- Cai, Y.; Guan, K.; Peng, J.; Wang, S.; Seifert, C.; Wardlow, B.; Li, Z.J. A high-performance and in-season classification system of field-level crop types using time-series Landsat data and a machine learning approach. Remote Sens. Environ. 2018, 210, 35–47. [Google Scholar] [CrossRef]
- Shahhosseini, M.; Hu, G.; Archontoulis, S.V.J. Forecasting corn yield with machine learning ensembles. Front. Plant Sci. 2020, 11, 1120. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Peng, Y.; Huemmrich, K.F.J. Relationship between fraction of radiation absorbed by photosynthesizing maize and soybean canopies and NDVI from remotely sensed data taken at close range and from MODIS 250 m resolution data. Remote Sens. Environ. 2014, 147, 108–120. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, X.; Dong, Z.; Guo, W. Estimation of biomass in wheat using random forest regression algorithm and remote sensing data. Crop J. 2016, 4, 212–219. [Google Scholar]
- Zhang, L.; Zhang, L.; Du, B. Deep learning for remote sensing data: A technical tutorial on the state of the art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Huang, X.; Wei, X.; Sang, T.; Zhao, Q.; Feng, Q.; Zhao, Y.; Li, L.C.; Zhu, Z.C.; Lu, L.T.; Zhang, Z. Genome-wide association studies of 14 agronomic traits in rice landraces. Nat. Genet. 2010, 42, 961–967. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Rice Variety Name | Source | Rice Types | Rice Period |
|---|---|---|---|---|
| D1 | Guangluai 4 hao | RRI GAAS * | Indica | 106 |
| D2 | Guichao 2 hao | RRI GAAS * | Indica | 111 |
| D3 | Huanghuazhan | RRI GAAS * | Indica | 112 |
| D4 | Yuexiangzhan | RRI GAAS * | Indica | 111 |
| D5 | Zhengkexinxuanmaio2hao | RRI GAAS * | Indica | 104 |
| D6 | Yuenongsimiao | RRI GAAS * | Indica | 110 |
| D7 | Yuehesimiao | RRI GAAS * | Indica | 111 |
| Band | Central Wavelength (nm) | Bandwidth (nm) |
|---|---|---|
| Green band | 560 | 16 |
| Red band | 650 | 16 |
| Red edge band | 730 | 16 |
| Near-infrared band | 840 | 26 |
| Vegetation Index | Name | Sensor | Formula | References |
|---|---|---|---|---|
| NDVI | Normalized Difference Vegetation Index | MS | NDVI = (NIR − R)/(NIR + R) | [15] |
| RAVI | Ratio Vegetation Index | MS | RVI = (NIR/R) | [16] |
| NLI | Normalized Leaf Index | MS | NLI = (NIR2 − R)/(NIR2 + R) | [17] |
| NDRE | Normalized Difference Red Edge Index | MS | NDRE = (NIR − RE)/(NIR + RE) | [18] |
| OSAVI | Optimization of Soil Regulatory | MS | OSAVI = 1.16 × (NIR − R)/(NIR + R + 0.16) | [19] |
| TCARI | Transform Chlorophyll Absorption Index | MS | TCARI = 3 × (RE − R) − 0.2 × (RE − G) × (RE/R) | [20] |
| MCARI | Modified Chlorophyll Absorption Reflectance Index | MS | MCARI = (NIR − R − 0.2 × (RE − G)) × (RE/R) | [21] |
| GRVI | Green-Red Vegetation Index | MS | GRVI = (G − R)/(G + R) | [22] |
| MSRI | Modified Second Ratio Index | MS | MSRI = (√(NIR/R) − 1)/(√(NIR/R) + 1) | [23] |
| GCI | Green Chlorophyll Index | MS | GCI = NIR/G − 1 | [23] |
| EVI2 | Enhanced Vegetation Index | MS | EVI2 = 2.5 × (NIR − R)/(NIR + 2.4 × R + 1) | [24] |
| MNVI | Modified Normalized Vegetation Index | MS | MNVI = 1.5 × (NIR2 − R)/(NIR2 + R + 0.5) | [25] |
| RVI1 | Ratio Vegetation Index | MS | RVI1 = NIR/R | [26] |
| RVI2 | Ratio Vegetation Index | MS | RVI2 = NIR/G | [26] |
| TVI | Triangle Vegetation Index | MS | TVI= 60 × (NIR − G) − 100 × (R − G) | [25] |
| TO | Transform Soil-Adjusted Vegetation Index | MS | TO= 3 × ((REG − R)/(REG − G)) × (REG/R)/OSAVI | [27] |
| MTCI | MERIS Terrestrial Chlorophyll Index | MS | NDVI = (NIR − RE)/(RE − R) | [28] |
| SAVE | Soil-Adjusted Vegetation Index | MS | SAVI = (1 + L) (NIR − R)/(NIR + R + L) | [27] |
| CI | Chlorophyll Index | MS | CI = NIR/G − 1 | [29] |
| MODEL | R2 | RMSE |
|---|---|---|
| Random Forest | 0.79 | 0.0251 |
| Linear Regression | 0.82 | 0.0235 |
| PLSR | 0.81 | 0.0240 |
| XGBoost | 0.78 | 0.0253 |
| LightGBM | 0.81 | 0.0244 |
| CatBoost | 0.77 | 0.0256 |
| Stacking | 0.88 | 0.0189 |
| Spectral Index | Correlation Coefficient (r) | Significant (p) | Degree of Relevance |
|---|---|---|---|
| MTCI | 0.83 | <0.01 | Strong positive correlation |
| TCARI | −0.82 | <0.01 | Strong negative correlation |
| TO | −0.72 | <0.01 | Significant negative correlation |
| GRVI | −0.74 | <0.01 | Significant negative correlation |
| NDRE | 0.69 | <0.01 | Significant positive correlation |
| CI | 0.68 | <0.01 | Significant positive correlation |
| TVI | −0.69 | <0.01 | Significant negative correlation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Z.; Lu, Z.; Zhang, L.; Liu, W.; Wang, X.; Wang, S.; Chen, H.; Wu, H.; Xu, W.; Fu, Y.; et al. Developing an Uncrewed Aerial Vehicle (UAV)-Based Prediction Model for the Rice Harvest Index Using Machine Learning. Agriculture 2025, 15, 971. https://doi.org/10.3390/agriculture15090971
Pan Z, Lu Z, Zhang L, Liu W, Wang X, Wang S, Chen H, Wu H, Xu W, Fu Y, et al. Developing an Uncrewed Aerial Vehicle (UAV)-Based Prediction Model for the Rice Harvest Index Using Machine Learning. Agriculture. 2025; 15(9):971. https://doi.org/10.3390/agriculture15090971
Chicago/Turabian StylePan, Zhaoyang, Zhanhua Lu, Liting Zhang, Wei Liu, Xiaofei Wang, Shiguang Wang, Hao Chen, Haoxiang Wu, Weicheng Xu, Youqiang Fu, and et al. 2025. "Developing an Uncrewed Aerial Vehicle (UAV)-Based Prediction Model for the Rice Harvest Index Using Machine Learning" Agriculture 15, no. 9: 971. https://doi.org/10.3390/agriculture15090971
APA StylePan, Z., Lu, Z., Zhang, L., Liu, W., Wang, X., Wang, S., Chen, H., Wu, H., Xu, W., Fu, Y., & He, X. (2025). Developing an Uncrewed Aerial Vehicle (UAV)-Based Prediction Model for the Rice Harvest Index Using Machine Learning. Agriculture, 15(9), 971. https://doi.org/10.3390/agriculture15090971