
Maize Leaf Area Index Estimation Based on Machine Learning Algorithm and Computer Vision

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
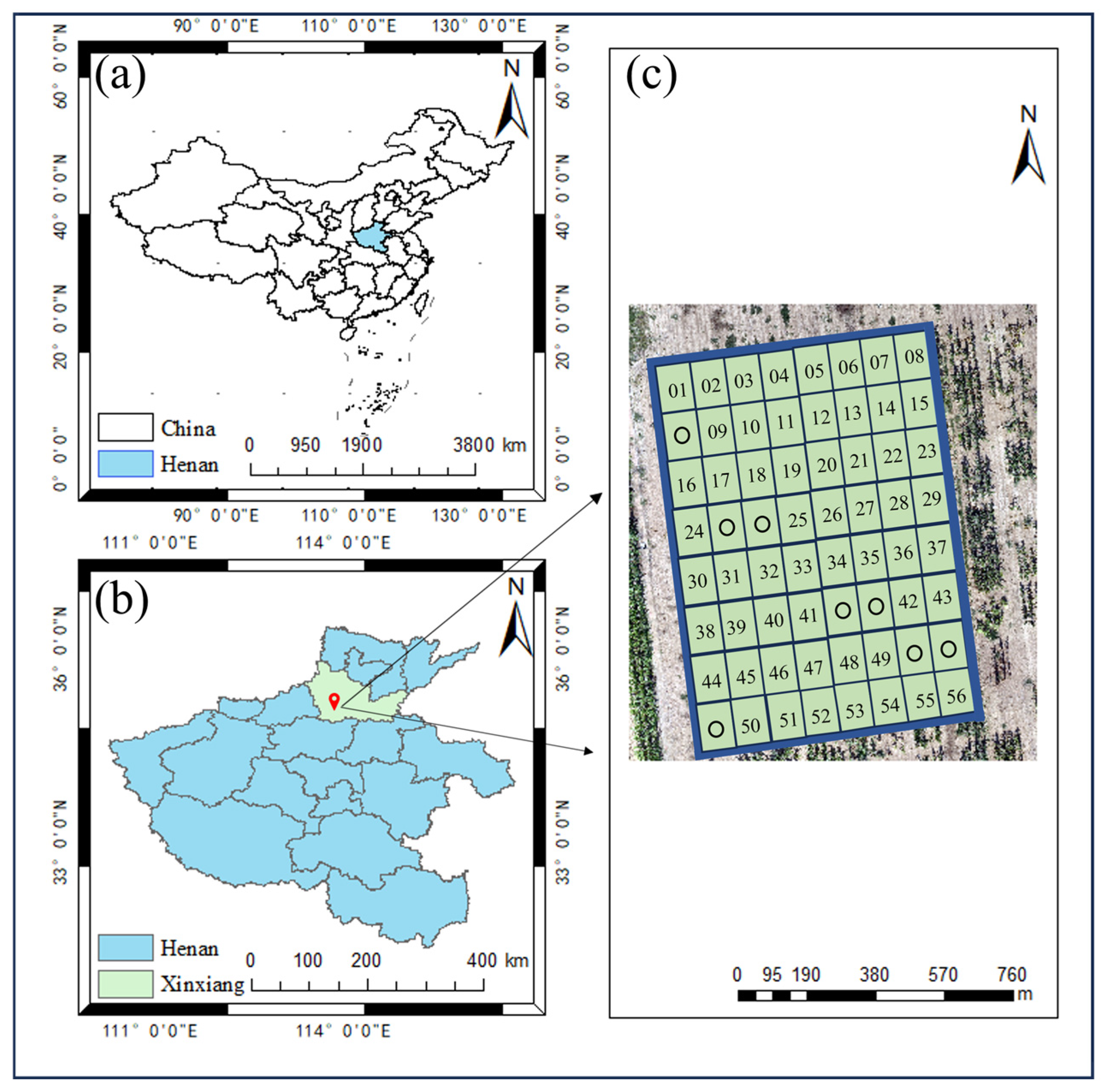
2.1. Overview of the Study Area
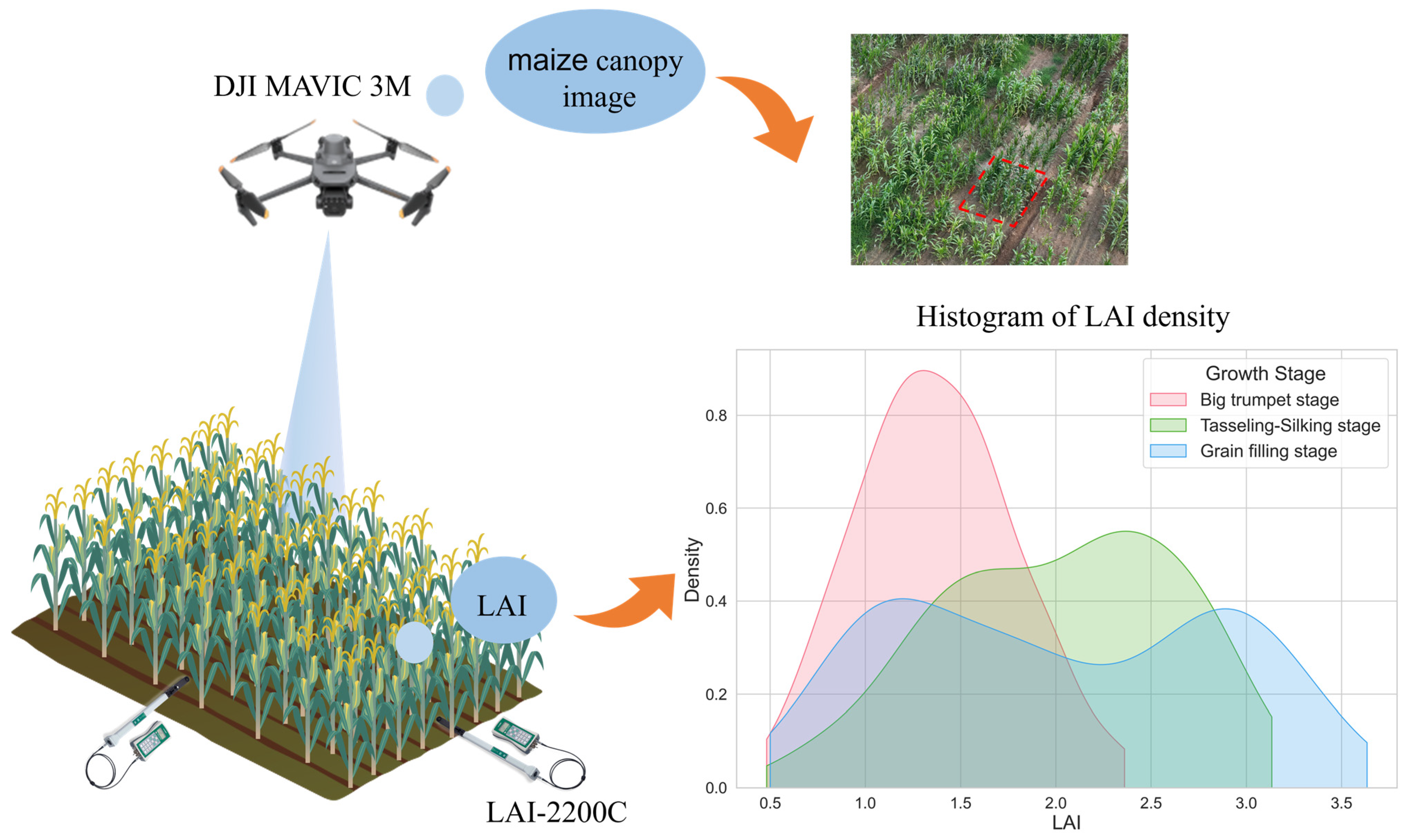
2.2. Data Acquisition
2.2.1. Field Data Acquisition
2.2.2. Acquisition and Preprocessing of UAV Remote Sensing Data
2.2.3. Vegetation Indices Extraction
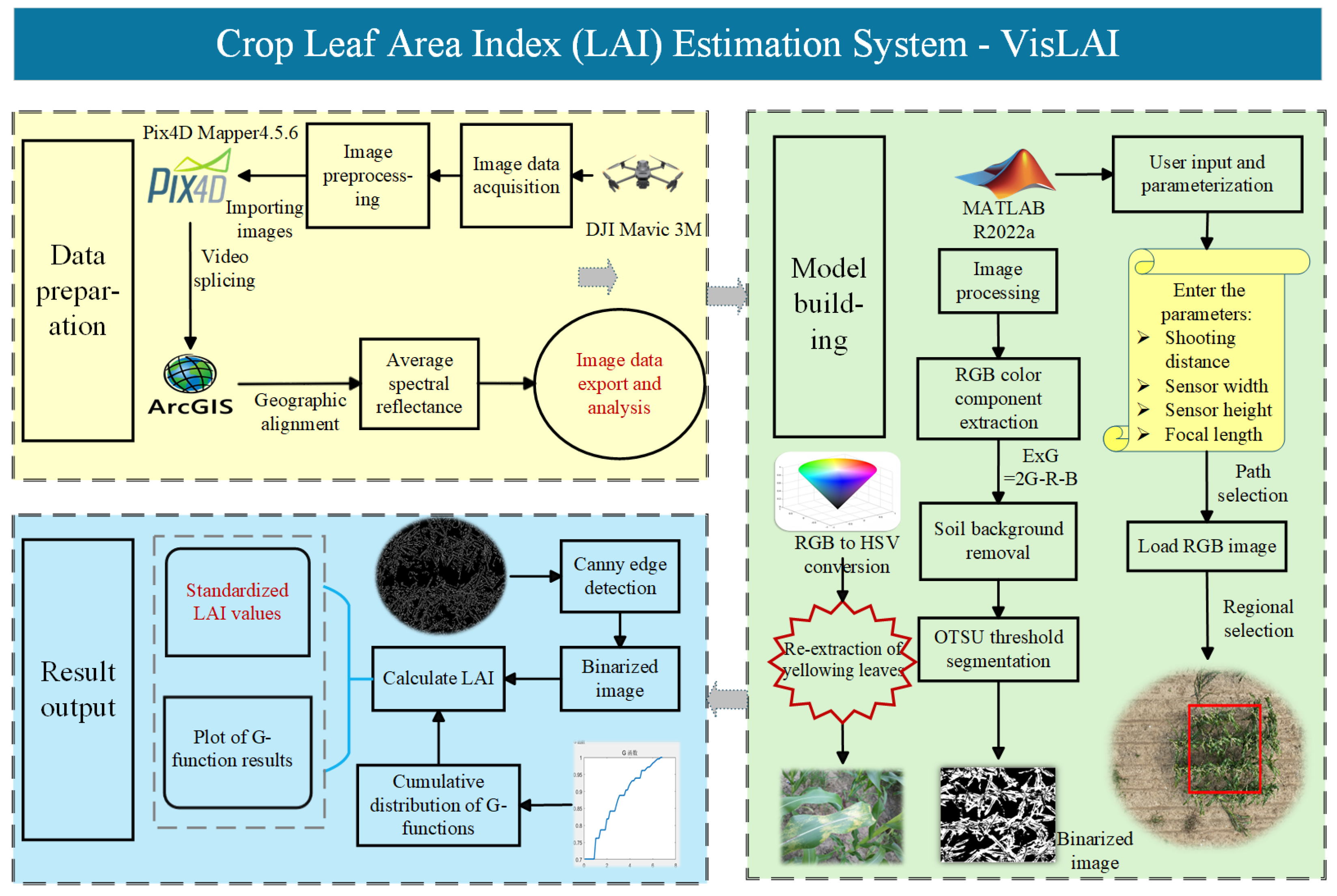
2.3. Image Processing Principles and Methods
2.3.1. Principles of Image Processing
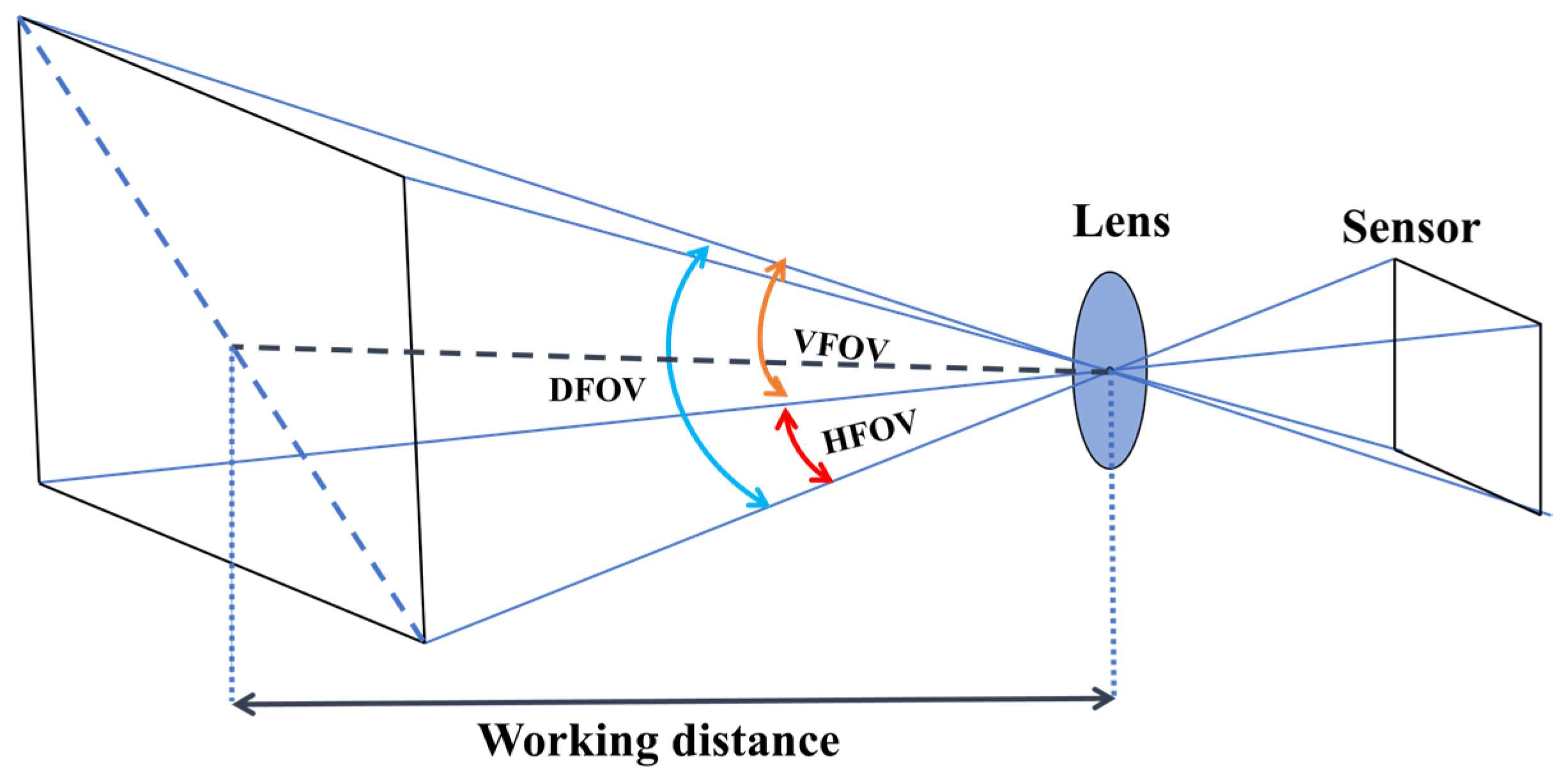
2.3.2. Determining the Actual Size of the Cell Based on the Field of View Angle
2.3.3. Segmentation Method Based on RGB and HSV Images
2.3.4. Edge Detection Based on the Canny Algorithm
2.3.5. The Standardized Estimation of LAI Based on the G Function
2.4. Data Analysis and Evaluation
2.4.1. Construction of Machine Learning-Based Model for Inversion of LAI
2.4.2. Construction of LAI Inversion Model Based on Machine Vision
2.4.3. Model Accuracy Evaluation
3. Results
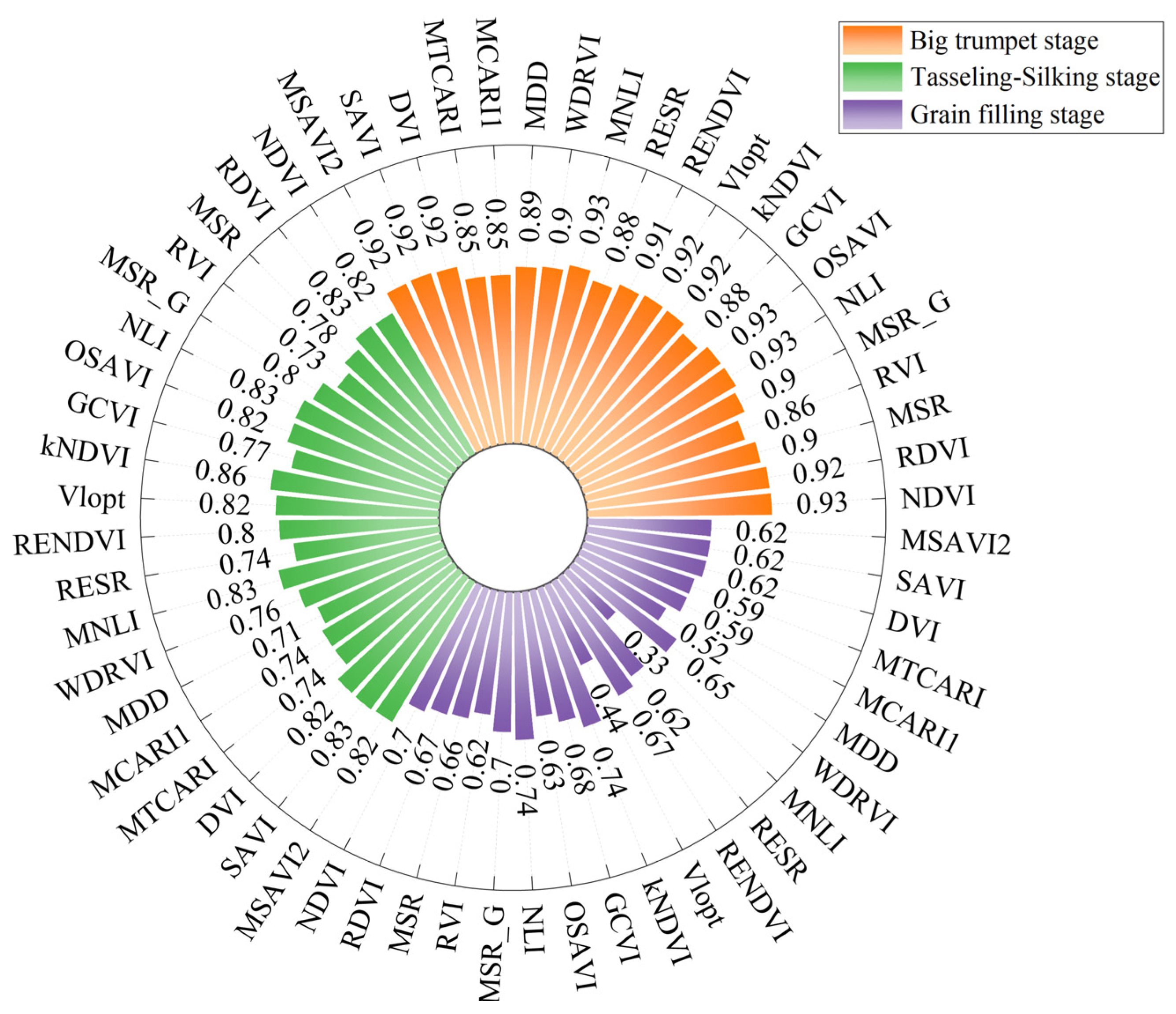
3.1. Correlation Analysis
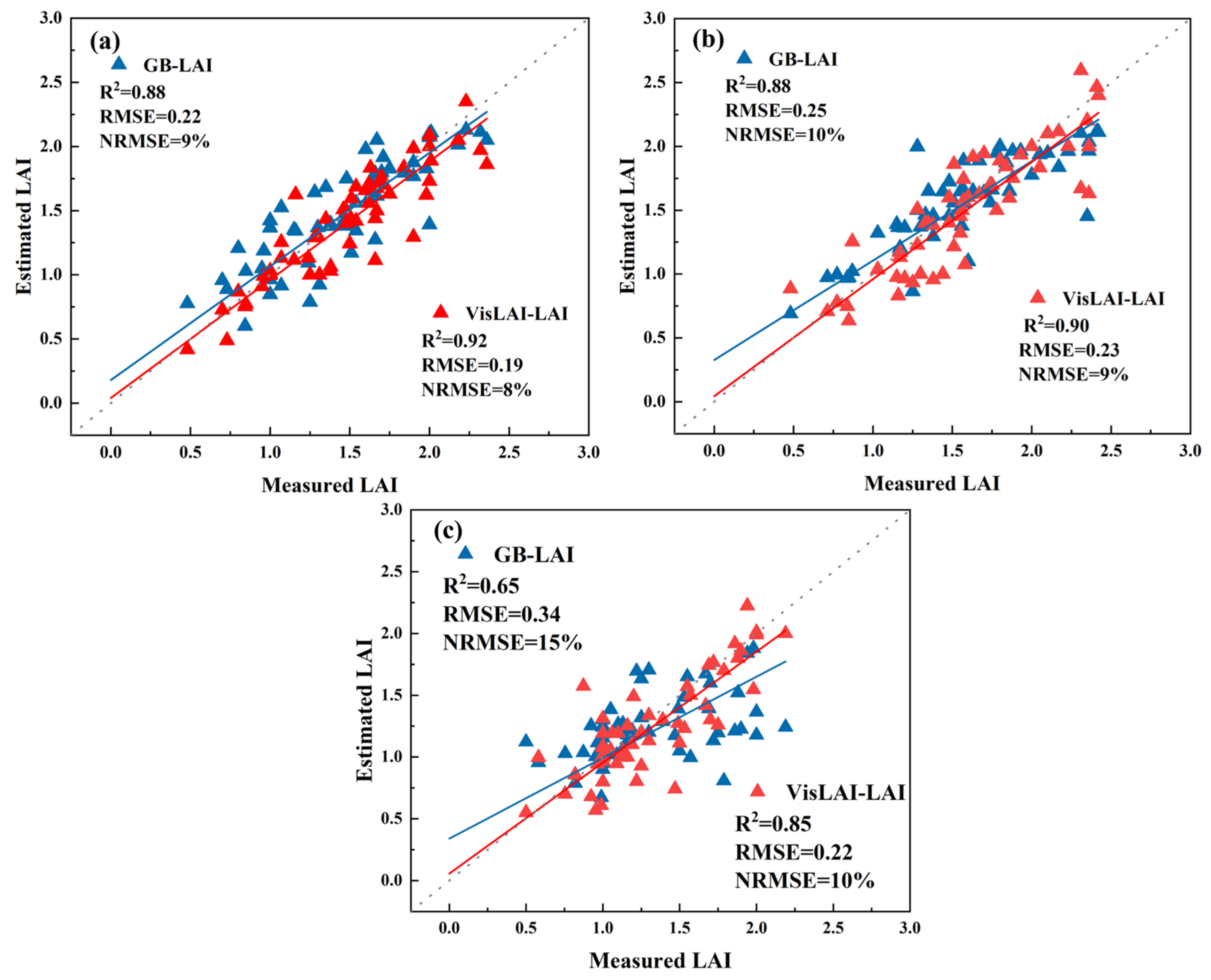
3.2. Comparison of Accuracy Across Different Estimation Models
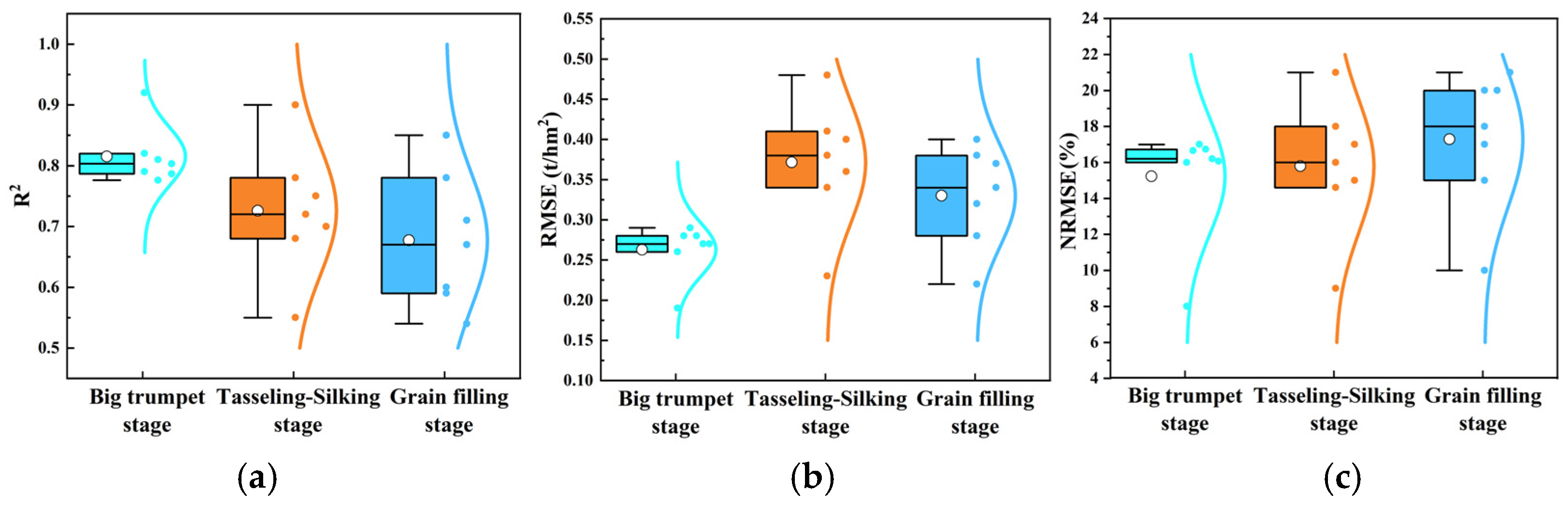
3.3. Changes in Model Accuracy at Different Fertility Stages
3.4. Spatial Distribution of LAI in Summer Maize
4. Discussion
4.1. Comparison of Different Machine Learning Algorithms
4.2. LAI Estimation of Summer Maize Based on VisLAI
4.3. Advantages and Disadvantages of VisLAI Compared to Machine Learning Algorithms
4.4. Estimation Accuracy of LAI at Different Growth Stages
4.5. The Significance and Limitations of This Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fang, H.L.; Baret, F.; Plummer, S.; Schaepman-Strub, G. An Overview of Global Leaf Area Index (LAI): Methods, Products, Validation, and Applications. Rev. Geophys. 2019, 57, 739–799. [Google Scholar] [CrossRef]
- Tooley, G.; Nippert, J.B.; Ratajczak, Z. Evaluating methods for measuring the leaf area index of encroaching shrubs in grasslands: From leaves to optical methods, 3-D scanning, and airborne observation. Agric. For. Meteorol. 2024, 349, 109964. [Google Scholar] [CrossRef]
- He, K.; Du, M.; Tian, X.; Xu, D.; Yin, X.; Li, Z. Effect of Cotton Planting Density on the Estimation of Leaf Area Index Using the LAI-2200 Plant Canopy Analyzer. Crops 2015, 5, 123–127. [Google Scholar] [CrossRef]
- Zhang, J.J.; Cheng, T.; Guo, W.; Xu, X.; Qiao, H.B.; Xie, Y.M.; Ma, X.M. Leaf area index estimation model for UAV image hyperspectral data based on wavelength variable selection and machine learning methods. Plant Methods 2021, 17, 49. [Google Scholar] [CrossRef]
- Chatterjee, S.; Baath, G.S.; Sapkota, B.R.; Flynn, K.C.; Smith, D.R. Enhancing LAI estimation using multispectral imagery and machine learning: A comparison between reflectance-based and vegetation indices-based approaches. Comput. Electron. Agric. 2025, 230, 109790. [Google Scholar] [CrossRef]
- Jin, Z.Y.; Liu, H.Z.; Cao, H.N.; Li, S.L.; Yu, F.H.; Xu, T.Y. Hyperspectral Remote Sensing Estimation of Rice Canopy LAI and LCC by UAV Coupled RTM and Machine Learning. Agriculture 2025, 15, 11. [Google Scholar] [CrossRef]
- Du, X.Y.; Zheng, L.Y.; Zhu, J.P.; He, Y. Enhanced Leaf Area Index Estimation in Rice by Integrating UAV-Based Multi-Source Data. Remote Sens. 2024, 16, 1138. [Google Scholar] [CrossRef]
- Xue, W.; Xia, X.Y.; Wan, P.C.; Zhong, P.; Zheng, X. Adversarial Attack on Object Detection via Object Feature-Wise Attention and Perturbation Extraction. Tsinghua Sci. Technol. 2025, 30, 1174–1189. [Google Scholar] [CrossRef]
- Chen, B.; Wu, Z.; Li, H.; Wang, J. Research of machine vision technology in agricultural application: Today and the future. Sci. Technol. Rev. 2018, 36, 54–65. [Google Scholar]
- Elinisa, C.A.; Maina, C.W.; Vodacek, A.; Mduma, N. Image Segmentation Deep Learning Model for Early Detection of Banana Diseases. Appl. Artif. Intell. 2025, 39, e2440837. [Google Scholar] [CrossRef]
- Sun, H.R.; Wei, Z.J.; Yu, W.G.; Yang, G.X.; She, J.N.; Zheng, H.B.; Jiang, C.Y.; Yao, X.; Zhu, Y.; Cao, W.X.; et al. SIDEST: A sample-free framework for crop field boundary delineation by integrating super-resolution image reconstruction and dual edge-corrected Segment Anything model. Comput. Electron. Agric. 2025, 230, 109897. [Google Scholar] [CrossRef]
- Lu, D.Y.; Jin, Z.J.; Lu, L.; He, W.Z.; Shu, Z.F.; Shao, J.N.; Ye, J.H.; Liang, Y.R. Exploratory study on the image processing technology-based tea shoot identification and leaf area calculation. J. Tea Sci. 2023, 43, 691–702. [Google Scholar]
- Müller, M.; Casser, V.; Lahoud, J.; Smith, N.; Ghanem, B. Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications. Int. J. Comput. Vis. 2018, 126, 902–919. [Google Scholar] [CrossRef]
- Feng, Z.; Cheng, Z.; Ren, L.; Liu, B.; Zhang, C.; Zhao, D.; Sun, H.; Feng, H.; Long, H.; Xu, B.; et al. Real-time monitoring of maize phenology with the VI-RGS composite index using time-series UAV remote sensing images and meteorological data. Comput. Electron. Agric. 2024, 224, 109212. [Google Scholar] [CrossRef]
- Ji, L.; Zhang, L.; Rover, J.; Wylie, B.K.; Chen, X.X. Geostatistical estimation of signal-to-noise ratios for spectral vegetation indices. Isprs J. Photogramm. Remote Sens. 2014, 96, 20–27. [Google Scholar] [CrossRef]
- Cheng, Q.; Xu, H.; Cao, Y.; Duan, F.; Chen, Z. Grain Yield Prediction of Winter Wheat Using Multi-temporal UAV Based on Multispectral Vegetation Index. Trans. Chin. Soc. Agric. Mach. 2021, 52, 160–167. [Google Scholar]
- Zhai, W.G.; Li, C.C.; Fei, S.P.; Liu, Y.H.; Ding, F.; Cheng, Q.; Chen, Z. CatBoost algorithm for estimating maize above-ground biomass using unmanned aerial vehicle-based multi-source sensor data and SPAD values. Comput. Electron. Agric. 2023, 214, 108306. [Google Scholar] [CrossRef]
- Li, X.; Xu, J.W.; Jia, Y.Y.; Liu, S.; Jiang, Y.D.; Yuan, Z.L.; Du, H.Y.; Han, R.; Ye, Y. Spatio-temporal dynamics of vegetation over cloudy areas in Southwest China retrieved from four NDVI products. Ecol. Inform. 2024, 81, 102630. [Google Scholar] [CrossRef]
- Pullanagari, R.R.; Yule, I.J.; Hedley, M.J.; Tuohy, M.P.; Dynes, R.A.; King, W.M. Multi-spectral radiometry to estimate pasture quality components. Precis. Agric. 2012, 13, 442–456. [Google Scholar] [CrossRef]
- Perez, O.; Diers, B.; Martin, N. Maturity Prediction in Soybean Breeding Using Aerial Images and the Random Forest Machine Learning Algorithm. Remote Sens. 2024, 16, 4343. [Google Scholar] [CrossRef]
- Wang, Q.; Moreno-Martinez, A.; Munoz-Mari, J.; Campos-Taberner, M.; Camps-Valls, G. Estimation of vegetation traits with kernel NDVI. Isprs J. Photogramm. Remote Sens. 2023, 195, 408–417. [Google Scholar] [CrossRef]
- Zhou, Z.J.; Jabloun, M.; Plauborg, F.; Andersen, M.N. Using ground-based spectral reflectance sensors and photography to estimate shoot N concentration and dry matter of potato. Comput. Electron. Agric. 2018, 144, 154–163. [Google Scholar] [CrossRef]
- Qiao, L.; Tang, W.J.; Gao, D.H.; Zhao, R.M.; An, L.L.; Li, M.Z.; Sun, H.; Song, D. UAV-based chlorophyll content estimation by evaluating vegetation index responses under different crop coverages. Comput. Electron. Agric. 2022, 196, 106775. [Google Scholar] [CrossRef]
- Zhou, Q.F.; Liu, Z.Y.; Huang, J.F. Detection of nitrogen-overfertilized rice plants with leaf positional difference in hyperspectral vegetation index. J. Zhejiang Univ.-Sci. B 2010, 11, 465–470. [Google Scholar] [CrossRef]
- Cao, Q.; Miao, Y.X.; Wang, H.Y.; Huang, S.Y.; Cheng, S.S.; Khosla, R.; Jiang, R.F. Non-destructive estimation of rice plant nitrogen status with Crop Circle multispectral active canopy sensor. Field Crops Res. 2013, 154, 133–144. [Google Scholar] [CrossRef]
- Huang, X.; Lin, D.; Mao, X.M.; Zhao, Y. Multi-source data fusion for estimating maize leaf area index over the whole growing season under different mulching and irrigation conditions. Field Crops Res. 2023, 303, 109111. [Google Scholar] [CrossRef]
- Chen, R.; Han, L.; Zhao, Y.H.; Zhao, Z.L.; Liu, Z.; Li, R.S.; Xia, L.F.; Zhai, Y.M. Extraction and monitoring of vegetation coverage based on uncrewed aerial vehicle visible image in a post gold mining area. Front. Ecol. Evol. 2023, 11, 1171358. [Google Scholar]
- Elsayed, S.; Rischbeck, P.; Schmidhalter, U. Comparing the performance of active and passive reflectance sensors to assess the normalized relative canopy temperature and grain yield of drought-stressed barley cultivars. Field Crops Res. 2015, 177, 148–160. [Google Scholar] [CrossRef]
- Erdle, K.; Mistele, B.; Schmidhalter, U. Comparison of active and passive spectral sensors in discriminating biomass parameters and nitrogen status in wheat cultivars. Field Crops Res. 2012, 124, 74–84. [Google Scholar] [CrossRef]
- Feng, W.; Wu, Y.P.; He, L.; Ren, X.X.; Wang, Y.Y.; Hou, G.G.; Wang, Y.H.; Liu, W.D.; Guo, T.C. An optimized non-linear vegetation index for estimating leaf area index in winter wheat. Precis. Agric. 2019, 20, 1157–1176. [Google Scholar] [CrossRef]
- Cao, Y.; Li, G.L.; Luo, Y.K.; Pan, Q.; Zhang, S.Y. Monitoring of sugar beet growth indicators using wide-dynamic-range vegetation index (WDRVI) derived from UAV multispectral images. Comput. Electron. Agric. 2020, 171, 105331. [Google Scholar] [CrossRef]
- Huang, X.; Vrieling, A.; Dou, Y.; Belgiu, M.; Nelson, A. A robust method for mapping soybean by phenological aligning of Sentinel-2 time series. Isprs J. Photogramm. Remote Sens. 2024, 218, 1–18. [Google Scholar] [CrossRef]
- Lu, J.; Miao, Y.; Shi, W.; Li, J.; Yuan, F. Evaluating different approaches to non-destructive nitrogen status diagnosis of rice using portable RapidSCAN active canopy sensor. Sci. Rep. 2017, 7, 14073. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Zhang, Y.; Liu, K.D.; Lan, S.; Gao, T.Y.; Li, M.Z. Winter wheat yield prediction using integrated Landsat 8 and Sentinel-2 vegetation index time-series data and machine learning algorithms. Comput. Electron. Agric. 2023, 213, 108250. [Google Scholar] [CrossRef]
- Meng, Q.Y.; Dong, H.; Qin, Q.M.; Wang, J.L.; Zhao, J.H. MTCARI: A Kind of Vegetation Index Monitoring Vegetation Leaf Chlorophyll Content Based on Hyperspectral Remote Sensing. Spectrosc. Spectr. Anal. 2012, 32, 2218–2222. [Google Scholar]
- Wu, G.J.; Zhou, Z.F.; Zhao, X.; Huang, D.H.; Long, Y.Y.; Peng, R.W. Study on correlation between crop optical vegetation index and radar parameters and its influencing factors based on plot unit. Geocarto Int. 2025, 40, 2453621. [Google Scholar] [CrossRef]
- Silva, D.C.; Madari, B.E.; Carvalho, M.D.S.; Costa, J.V.S.; Ferreira, M.E. Planning and optimization of nitrogen fertilization in corn based on multispectral images and leaf nitrogen content using unmanned aerial vehicle (UAV). Precis. Agric. 2025, 26, 30. [Google Scholar] [CrossRef]
- Laosuwan, T.; Uttaruk, P. Estimating Tree Biomass via Remote Sensing, MSAVI 2, and Fractional Cover Model. Iete Tech. Rev. 2014, 31, 362–368. [Google Scholar] [CrossRef]
- Du, Z.Y.; Yuan, J.; Zhou, Q.Y.; Hettiarachchi, C.; Xiao, F.P. Laboratory application of imaging technology on pavement material analysis in multiple scales: A review. Constr. Build. Mater. 2021, 304, 124619. [Google Scholar] [CrossRef]
- Meng, X.Y.; Xu, Q.H.; Xiao, S.D.; Li, Y.; Zhao, B.; Li, G.H. Performance of Sub-Pixel Displacement Iterative Algorithm Based on Digital Image Correlation Method. Acta Opt. Sin. 2024, 44, 0312003. [Google Scholar]
- Yuan, L.Z.; Li, J.Y.; Fan, Y.; Shi, J.L.; Huang, Y.M. Enhancing pointing accuracy in Risley prisms through error calibration and stochastic parallel gradient descent inverse solution method. Precis. Eng.-J. Int. Soc. Precis. Eng. Nanotechnol. 2025, 93, 37–45. [Google Scholar] [CrossRef]
- Liu, G.S.; Tian, S.K.; Wang, Q.; Wang, H.Z.; Kong, L.W. High-resolution measurement of moisture filed at soil surface with interfered image processing method and machine learning techniques. J. Hydrol. 2025, 652, 132623. [Google Scholar] [CrossRef]
- Houssein, E.H.; Mohamed, G.M.; Ibrahim, I.A.; Wazery, Y.M. An efficient multilevel image thresholding method based on improved heap-based optimizer. Sci. Rep. 2023, 13, 9094. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.K.; Yang, J.H.; Lou, W.D.; Sheng, L.; Li, D.; Hu, H. Improving grain yield prediction through fusion of multi-temporal spectral features and agronomic trait parameters derived from UAV imagery. Front. Plant Sci. 2023, 14, 1217448. [Google Scholar] [CrossRef]
- Guo, B.; Xu, M.; Zhang, R.; Lu, M. Dynamic monitoring of rocky desertification utilizing a novel model based on Sentinel-2 images and KNDVI. Geomat. Nat. Hazards Risk 2024, 15, 2399659. [Google Scholar] [CrossRef]
- Feng, H.K.; Tao, H.L.; Li, Z.H.; Yang, G.J.; Zhao, C.J. Comparison of UAV RGB Imagery and Hyperspectral Remote-Sensing Data for Monitoring Winter Wheat Growth. Remote Sens. 2022, 14, 3811. [Google Scholar] [CrossRef]
- Zhang, H.; Yan, J. Low-light image enhancement guided by semantic segmentation and HSV color space. J. Image Graph. 2024, 29, 966–977. [Google Scholar] [CrossRef]
- Orka, N.A.; Haque, E.; Uddin, M.N.; Ahamed, T. Nutrispace: A novel color space to enhance deep learning based early detection of cucurbits nutritional deficiency. Comput. Electron. Agric. 2024, 225, 109296. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhou, J. Overview of Image Edge Detection. Comput. Eng. Appl. 2023, 59, 40–54. [Google Scholar]
- Ma, H.; Zhao, W.J.; Yu, H.Y.; Yang, P.T.; Yang, F.Q.; Li, Z.L. Diagnosis alfalfa salt stress based on UAV multispectral image texture and vegetation index. Plant and Soil. 2025. [Google Scholar] [CrossRef]
- Shahrestani, S.; Sanislav, I. Delineation of geochemical anomalies through empirical cumulative distribution function for mineral exploration. J. Geochem. Explor. 2025, 270, 107662. [Google Scholar] [CrossRef]
- Korkmaz, M. A study over the general formula of regression sum of squares in multiple linear regression. Numer. Methods Partial Differ. Equ. 2021, 37, 406–421. [Google Scholar] [CrossRef]
- Huang, H.; Liu, Y.; Ma, Y.H.; Xiang, S.H.; He, J.N.; Wang, S.T.; Guo, J.X. Prediction of Soluble Solid Contents in Apples Using Vis-NIRS and Functional Linear Regression Model. Spectrosc. Spectr. Anal. 2024, 44, 1905–1912. [Google Scholar]
- Li, W.; Huang, J.; Qi, Y.; Liu, X.; Liu, J.; Mao, Z.; Gao, X. Meta-analysis of Soil Microbial Biomass Carbon Content and Its Influencing Factors under Soil Erosion. Ecol. Environ. Sci. 2023, 32, 47–55. [Google Scholar]
- Ahrens, A.; Hansen, C.B.; Schaffer, M.E. lassopack: Model selection and prediction with regularized regression in Stata. Stata J. 2020, 20, 176–235. [Google Scholar] [CrossRef]
- Zhang, H.Z.; Zhou, A.M.; Zhang, H. An Evolutionary Forest for Regression. Ieee Trans. Evol. Comput. 2022, 26, 735–749. [Google Scholar] [CrossRef]
- Bellocchio, F.; Ferrari, S.; Piuri, V.; Borghese, N.A. Hierarchical Approach for Multiscale Support Vector Regression. Ieee Trans. Neural Netw. Learn. Syst. 2012, 23, 1448–1460. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, J.; Jia, H. The Application of Stochastic Gradient Boosting to the Analysis on Metabolomics Data. Chin. J. Health Stat. 2013, 30, 323–326. [Google Scholar]
- Li, Y.F.; Li, C.C.; Cheng, Q.; Chen, L.; Li, Z.P.; Zhai, W.G.; Mao, B.H.; Chen, Z. Precision estimation of winter wheat crop height and above-ground biomass using unmanned aerial vehicle imagery and oblique photoghraphy point cloud data. Front. Plant Sci. 2024, 15, 1437350. [Google Scholar] [CrossRef]
- Li, Y.F.; Li, C.C.; Cheng, Q.; Duan, F.Y.; Zhai, W.G.; Li, Z.P.; Mao, B.H.; Ding, F.; Kuang, X.H.; Chen, Z. Estimating Maize Crop Height and Aboveground Biomass Using Multi-Source Unmanned Aerial Vehicle Remote Sensing and Optuna-Optimized Ensemble Learning Algorithms. Remote Sens. 2024, 16, 3176. [Google Scholar] [CrossRef]
- Dorj, U.O.; Lee, M.; Yun, S.S. An yield estimation in citrus orchards via fruit detection and counting using image processing. Comput. Electron. Agric. 2017, 140, 103–112. [Google Scholar] [CrossRef]
- Niu, X.T.; Fan, J.; Wang, S.; Wang, Q.M. Measuring the dynamics of leaf area index of vegetation using fisheye camera. Ying Yong Sheng Tai Xue Bao = J. Appl. Ecol. 2018, 29, 3183–3190. [Google Scholar]
- Yamaguchi, Y.; Yoshida, I.; Kondo, Y.; Numada, M.; Koshimizu, H.; Oshiro, K.; Saito, R. Edge-preserving smoothing filter using fast M-estimation method with an automatic determination algorithm for basic width. Sci. Rep. 2023, 13, 5477. [Google Scholar] [CrossRef] [PubMed]
- Singh, H.; Kommuri, S.V.R.; Kumar, A.; Bajaj, V. A new technique for guided filter based image denoising using modified cuckoo search optimization. Expert Syst. Appl. 2021, 176, 114884. [Google Scholar] [CrossRef]
- Meng, L.; Yin, D.M.; Cheng, M.H.; Liu, S.B.; Bai, Y.; Liu, Y.; Liu, Y.D.; Jia, X.; Nan, F.; Song, Y.; et al. Improved Crop Biomass Algorithm with Piecewise Function (iCBA-PF) for Maize Using Multi-Source UAV Data. Drones 2023, 7, 254. [Google Scholar] [CrossRef]
- Zhao, R.L.; Wang, Y.H.; Yu, X.F.; Liu, W.M.; Ma, D.L.; Li, H.Y.; Ming, B.; Zhang, W.J.; Cai, Q.M.; Gao, J.L.; et al. Dynamics of Maize Grain Weight and Quality during Field Dehydration and Delayed Harvesting. Agriculture 2023, 13, 1357. [Google Scholar] [CrossRef]
- Appiah, O.; Hackman, K.O.; Diakalia, S.; Codjia, A.K.D.; Bebe, M.; Ouedraogo, V.; Diallo, B.A.A.; Gandji, K.; Abdoul-Karim, D.; Ogunjobi, K.O.; et al. TOM2024: Datasets of tomato, onion, and maize images for developing pests and diseases AI-based classification models. Data Brief 2025, 59, 111357. [Google Scholar] [CrossRef]
- Li, Z.M.; Yuan, C.; Li, S.D.; Zhang, Y.; Bai, B.; Yang, F.P.; Liu, P.P.; Sang, W.; Ren, Y.; Singh, R.; et al. Genetic Analysis of Stripe Rust Resistance in the Chinese Wheat Cultivar Luomai 163. Plant Dis. 2024, 108, 3550–3561. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phenology Stage | BBCH Scale | Description |
|---|---|---|
| Principal growth stage 3: stem elongation | 39 | Nine or more nodes detectable |
| Principal growth stage 5: inflorescence emergence, heading | 51 | Beginning of tassel emergence: tassel detectable at top of stem |
| Principal growth stage 6: flowering, anthesis | 61 | Male: stamens in middle of tassel visible Female: tip of ear emerging from leaf sheath |
| Principal growth stage 7: development of fruit | 71 | Beginning of grain development: kernels at blister stage, approximately 16% dry matter |
| Growth Stages | Data | Sample Size | Leaf Area Index (LAI) | |||
|---|---|---|---|---|---|---|
| Min | Max | Mean | Standard Deviation | |||
| Big trumpet stage | 25 July 2024 | 56 | 0.48 | 2.36 | 1.46 | 0.43 |
| Tasseling–silking stage | 5 August 2024 | 56 | 0.50 | 2.42 | 1.59 | 0.47 |
| Grain filling stage | 20 August 2024 | 56 | 0.47 | 2.19 | 1.30 | 0.39 |
| VI | Formula | Source |
|---|---|---|
| Normalized difference vegetation index (NDVI) | [18] | |
| Renormalized difference vegetation index (RDVI) | [19] | |
| Excess green index (ExG) | [20] | |
| Kernel normalized difference vegetation index (kNDVI) | [21] | |
| Ratio vegetation index (RVI) | [22] | |
| Optimization of soil regulatory vegetation index (OSAVI) | [23] | |
| Modified ratio vegetation index (MSR) | [24] | |
| Modified greenness ratio vegetation index (MSR_G) | [25] | |
| Nonlinear vegetation index (NLI) | [26] | |
| Optimal vegetation index (Vlopt) | [27] | |
| Red edge normalized difference vegetation index (RENDVI) | [28] | |
| Red edge ratio vegetation index (RESR) | [29] | |
| Modified nonlinear vegetation index (MNLI) | [30] | |
| Wide dynamic range vegetation index (WDRVI) | [31] | |
| Green chlorophyll vegetation index (GCVI) | [32] | |
| Modified double-difference vegetation index (MDD) | [33] | |
| Modified chlorophyll absorption reflectance index (MCARI1) | [34] | |
| Modified transformed chlorophyll absorption reflectance index (MTCAR) | [35] | |
| Difference vegetation index (DVI) | [36] | |
| Soil-adjusted vegetation index (SAVI) | [37] | |
| Modified soil-adjusted vegetation index (MSAVI2) | [38] |
| Machine Learning | Growth Stages | Big Trumpet Stage | Tasseling–Silking Stage | Grain Filling Stage | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Metric | R2 | RMSE | NRMSE (%) | R2 | RMSE | NRMSE (%) | R2 | RMSE | NRMSE (%) | |
| GB | Training set | 0.94 | 0.15 | 6% | 0.90 | 0.21 | 9% | 0.89 | 0.18 | 8% |
| Test set | 0.82 | 0.26 | 16% | 0.78 | 0.34 | 15% | 0.78 | 0.28 | 15% | |
| LR | Training set | 0.90 | 0.20 | 8% | 0.79 | 0.31 | 13% | 0.69 | 0.30 | 14% |
| Test set | 0.79 | 0.28 | 17% | 0.55 | 0.48 | 21% | 0.59 | 0.38 | 20% | |
| RR | Training set | 0.87 | 0.22 | 9% | 0.74 | 0.34 | 14% | 0.52 | 0.38 | 17% |
| Test set | 0.78 | 0.29 | 17% | 0.68 | 0.41 | 18% | 0.60 | 0.37 | 20% | |
| Lasso | Training set | 0.85 | 0.24 | 10% | 0.74 | 0.34 | 14% | 0.47 | 0.40 | 18% |
| Test set | 0.79 | 0.28 | 17% | 0.72 | 0.38 | 16% | 0.54 | 0.40 | 21% | |
| RF | Training set | 0.90 | 0.19 | 8% | 0.80 | 0.30 | 12% | 0.84 | 0.21 | 10% |
| Test set | 0.81 | 0.27 | 16% | 0.75 | 0.36 | 15% | 0.71 | 0.32 | 17% | |
| SVR | Training set | 0.88 | 0.21 | 9% | 0.74 | 0.34 | 14% | 0.61 | 0.34 | 15% |
| Test set | 0.80 | 0.27 | 16% | 0.70 | 0.40 | 17% | 0.67 | 0.34 | 18% | |
| Method | Big Trumpet Stage | Tasseling–Silking Stage | Grain Filling Stage | ||||||
|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | NRMSE (%) | R2 | RMSE | NRMSE (%) | R2 | RMSE | NRMSE (%) | |
| VisLAI-RGB | 0.84 | 0.24 | 14% | 0.75 | 0.35 | 14% | 0.50 | 0.44 | 23% |
| VisLAI-HSV | 0.92 | 0.19 | 8% | 0.90 | 0.23 | 9% | 0.85 | 0.22 | 10% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, W.; Chen, Z.; Cheng, Q.; Li, Y.; Zhai, W.; Ding, F.; Kuang, X.; Chen, D.; Duan, F. Maize Leaf Area Index Estimation Based on Machine Learning Algorithm and Computer Vision. Agriculture 2025, 15, 1272. https://doi.org/10.3390/agriculture15121272
Fu W, Chen Z, Cheng Q, Li Y, Zhai W, Ding F, Kuang X, Chen D, Duan F. Maize Leaf Area Index Estimation Based on Machine Learning Algorithm and Computer Vision. Agriculture. 2025; 15(12):1272. https://doi.org/10.3390/agriculture15121272
Chicago/Turabian StyleFu, Wanna, Zhen Chen, Qian Cheng, Yafeng Li, Weiguang Zhai, Fan Ding, Xiaohui Kuang, Deshan Chen, and Fuyi Duan. 2025. "Maize Leaf Area Index Estimation Based on Machine Learning Algorithm and Computer Vision" Agriculture 15, no. 12: 1272. https://doi.org/10.3390/agriculture15121272
APA StyleFu, W., Chen, Z., Cheng, Q., Li, Y., Zhai, W., Ding, F., Kuang, X., Chen, D., & Duan, F. (2025). Maize Leaf Area Index Estimation Based on Machine Learning Algorithm and Computer Vision. Agriculture, 15(12), 1272. https://doi.org/10.3390/agriculture15121272