
Three-Dimensional Path Planning for Unmanned Aerial Vehicles Based on Hybrid Multi-Strategy Dung Beetle Optimization Algorithm

Abstract
1. Introduction
- (1)
- A novel HMSDBO algorithm is proposed for the 3D path planning of agricultural UAVs, significantly enhancing the efficiency and accuracy of path searches. The algorithm reduces path lengths, improves path smoothness, and adapts effectively to environmental changes and obstacles, thereby meeting the real-time navigation requirements in complex environments.
- (2)
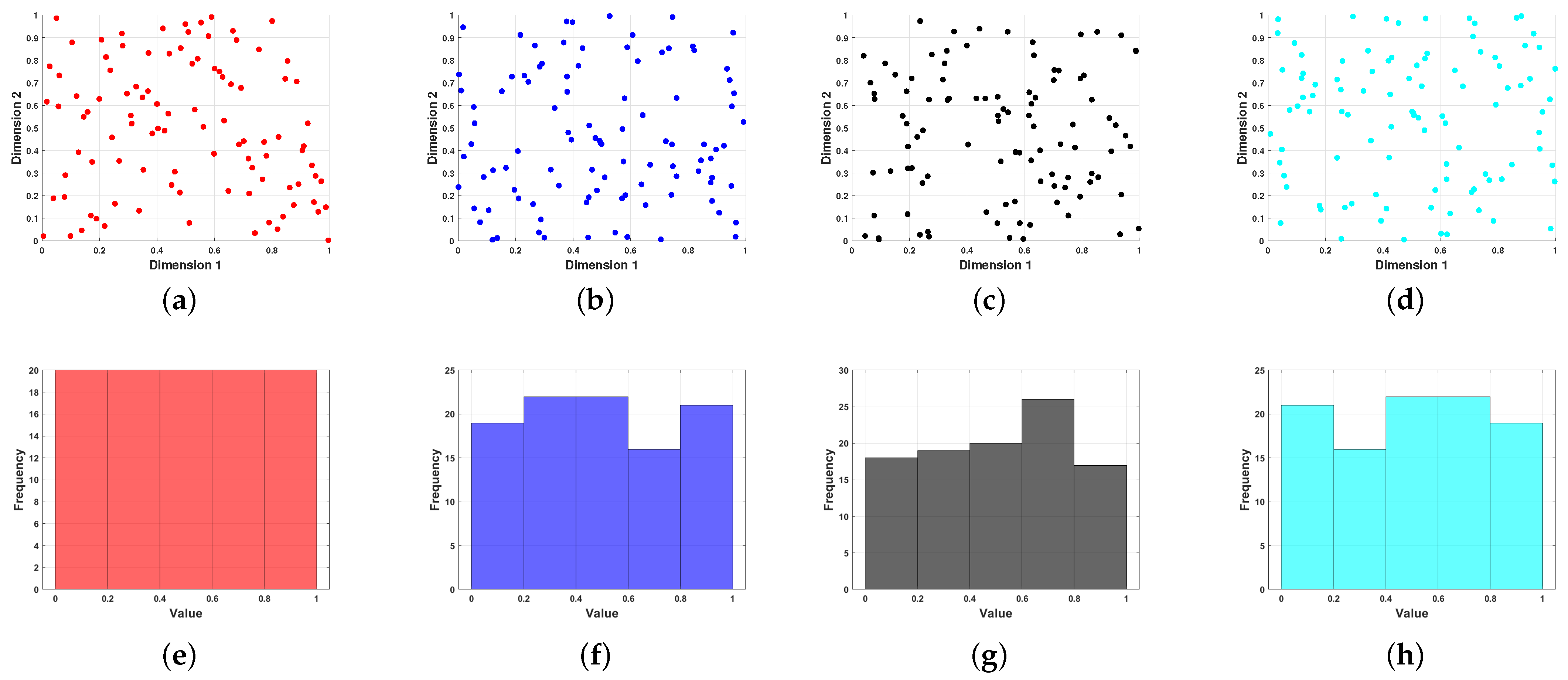
- An innovative Latin hypercube sampling method (LHS) is developed for population initialization, greatly improving the algorithm’s global search capability and promoting diversity within the population. Additionally, a new golden sine strategy and hybrid adaptive weighting strategy are introduced to address the limitations during the global search and local refinement phases. These innovations enhance convergence speed, robustness, and prevent the algorithm from becoming trapped in local optima.
- (3)
- A new 3D path planning model is introduced to accurately simulate the actual flight environment, substantially improving system accuracy. This model integrates key factors such as obstacle avoidance, path smoothness, and path length, while incorporating an innovative objective function that optimizes routes and effectively balances flight costs.
- (4)
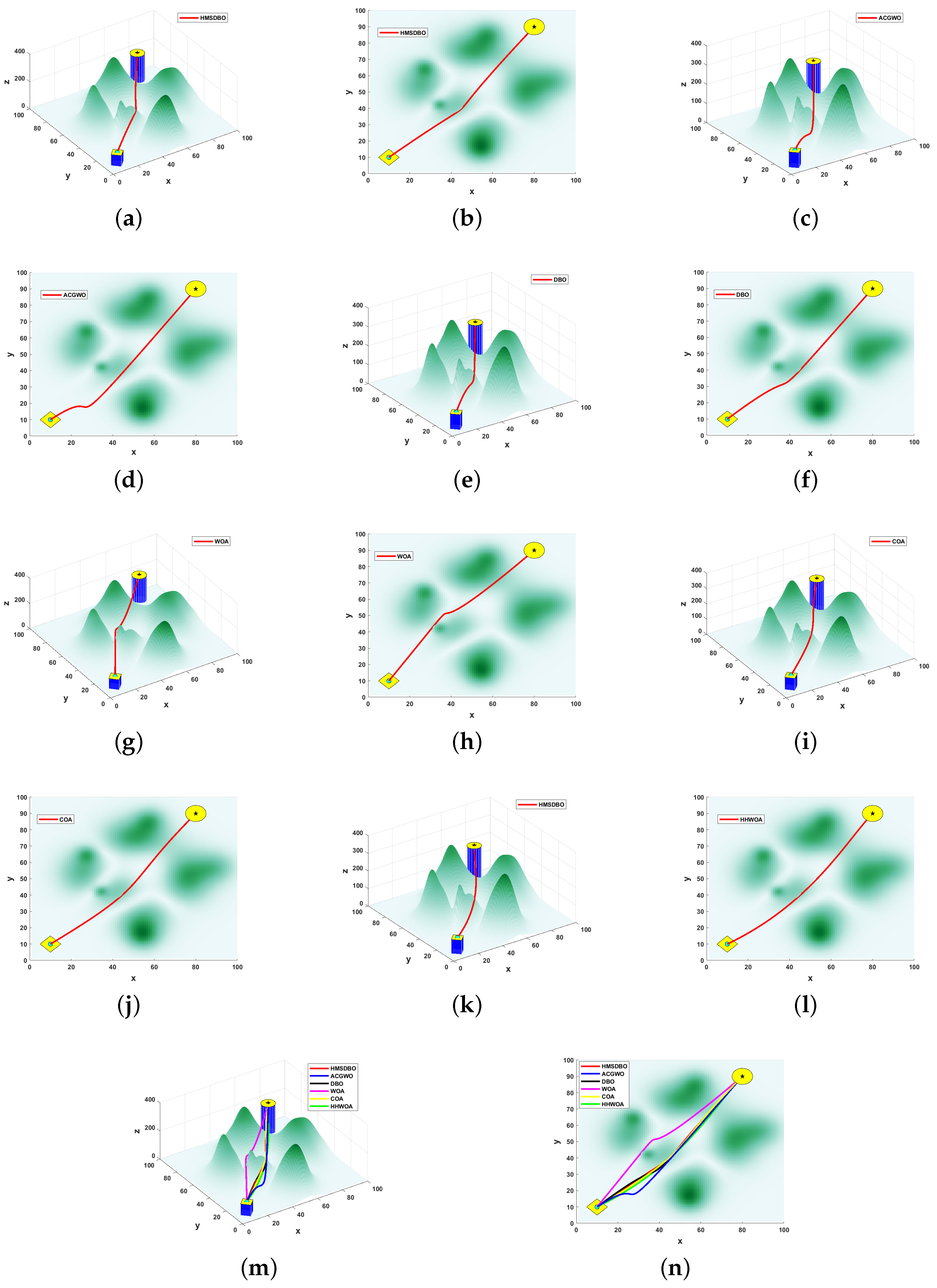
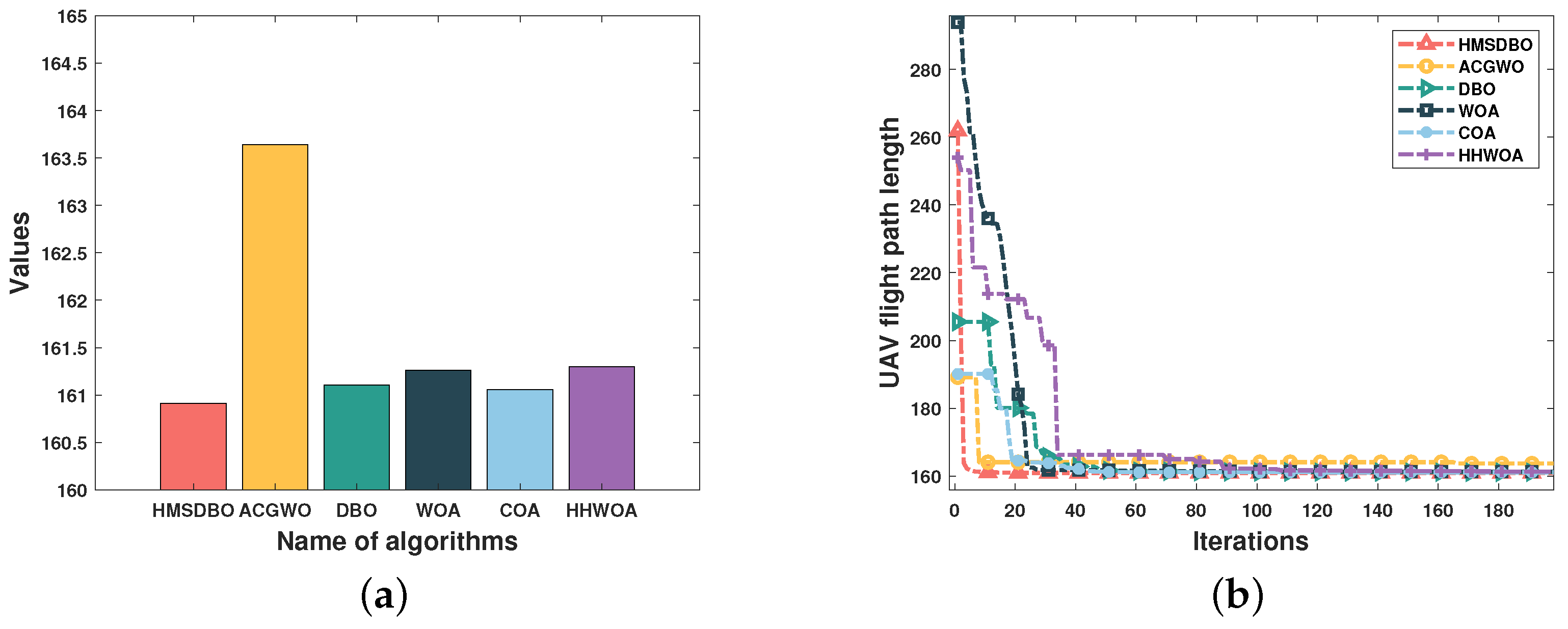
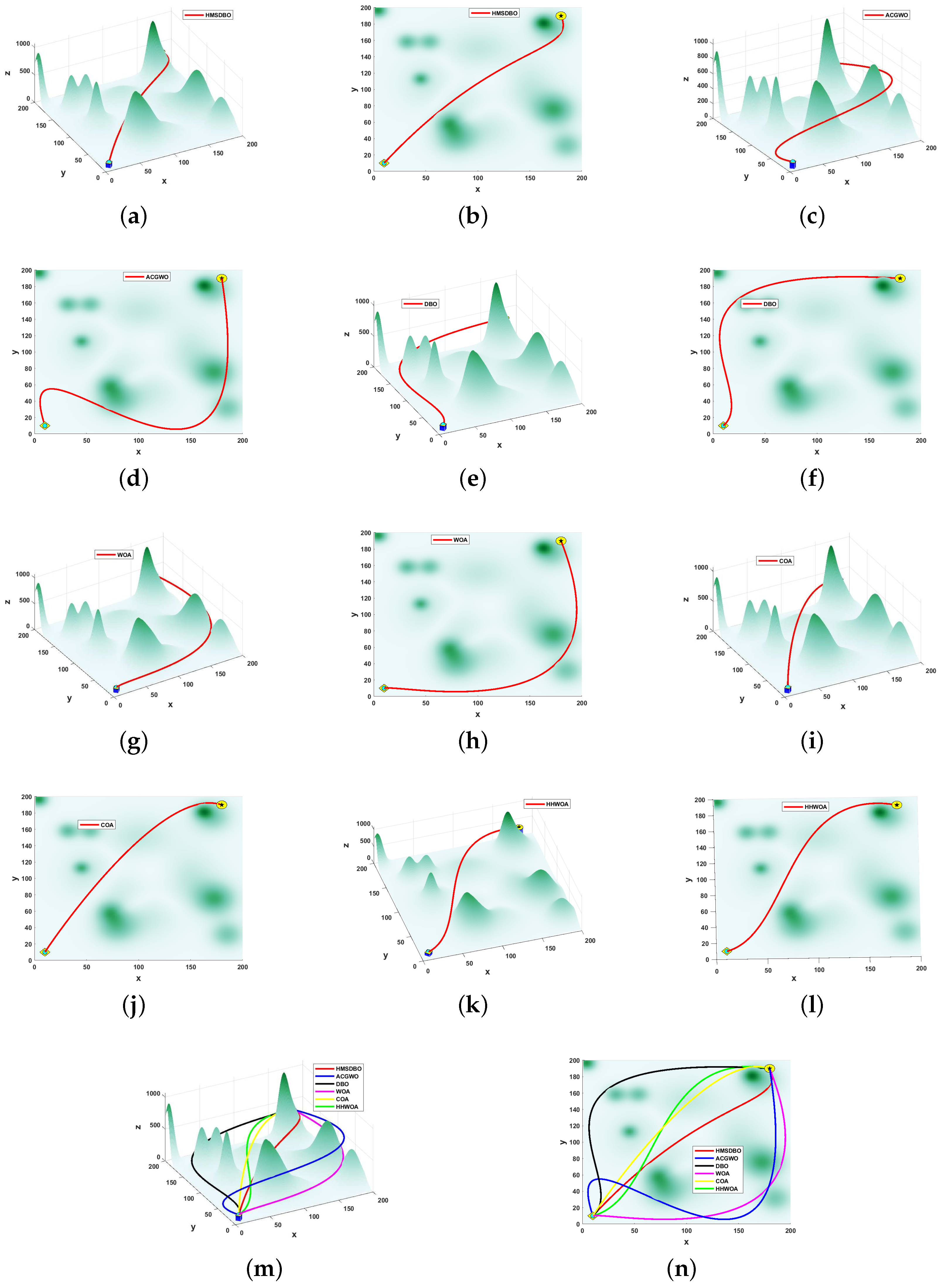
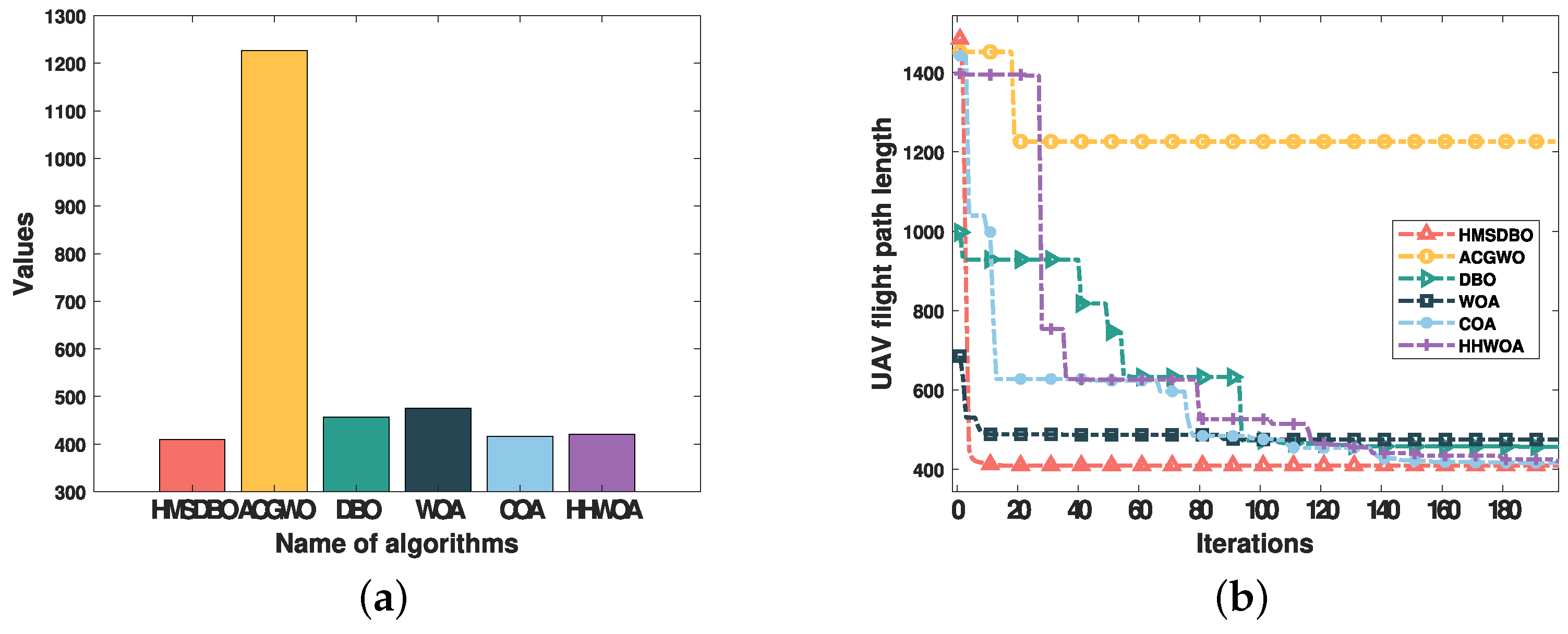
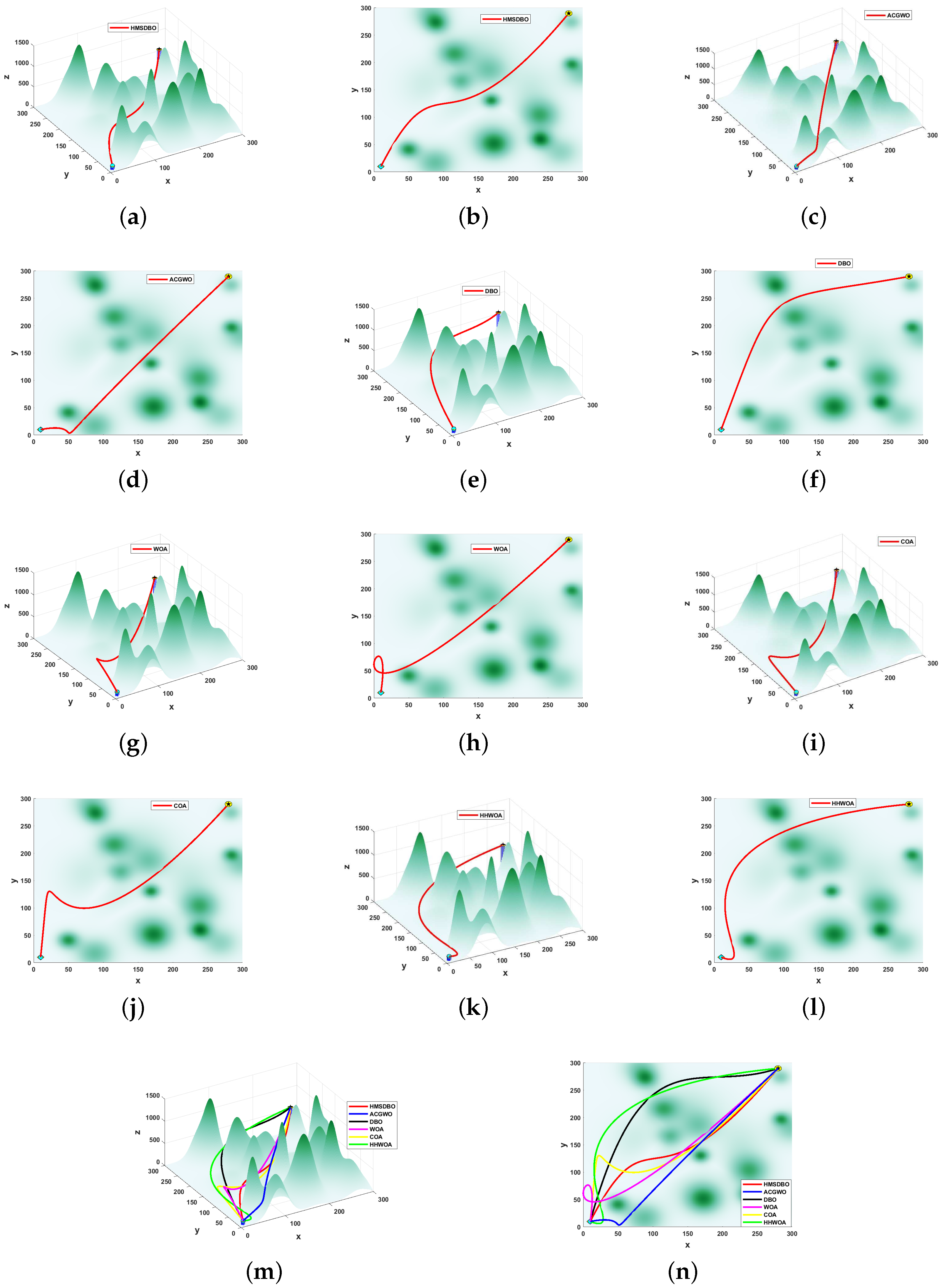
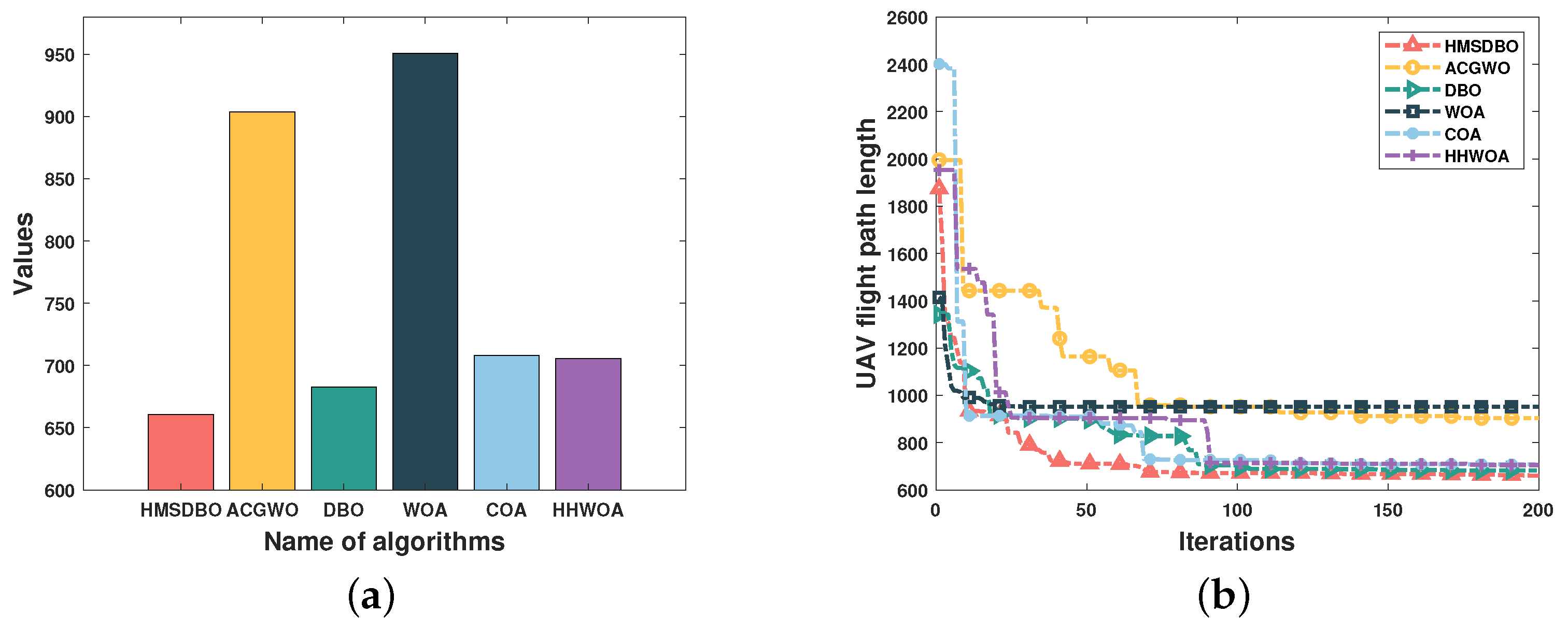
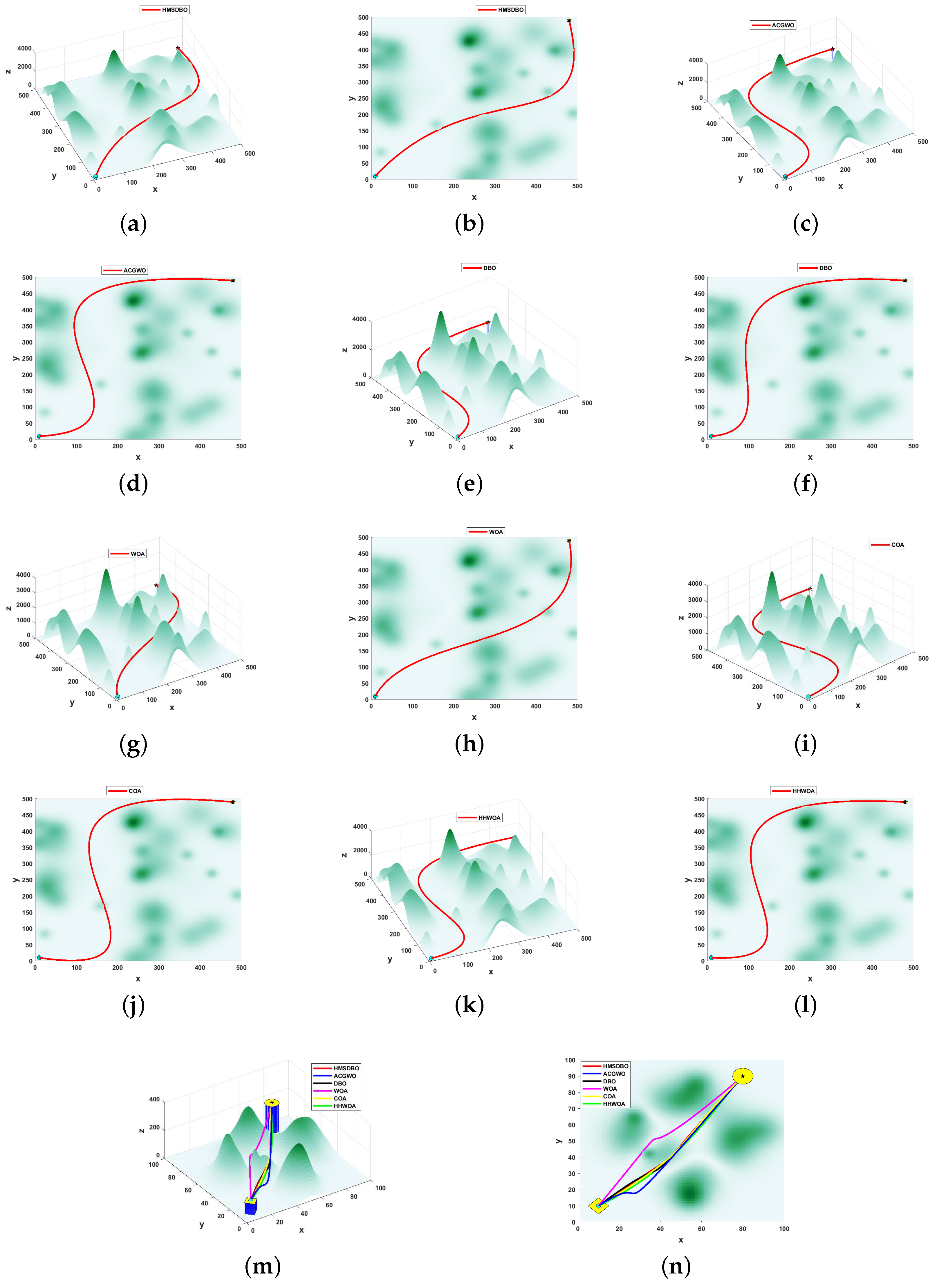
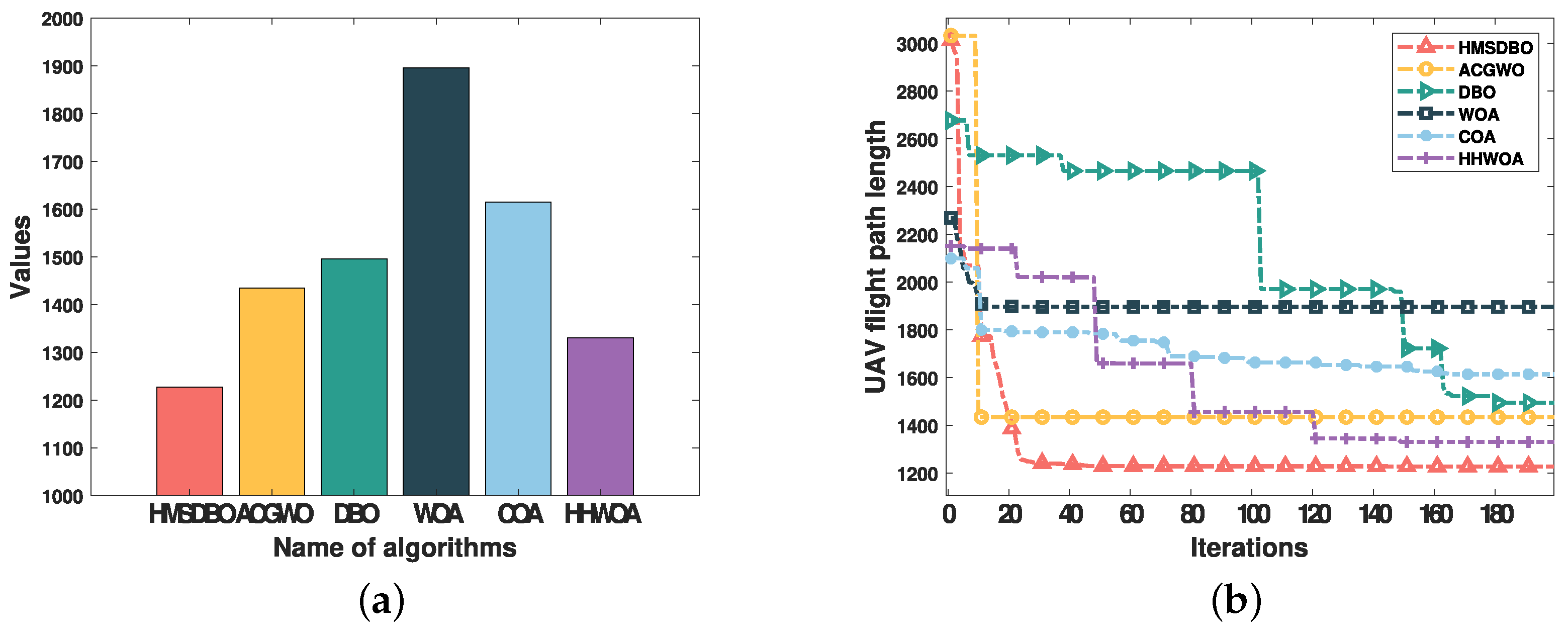
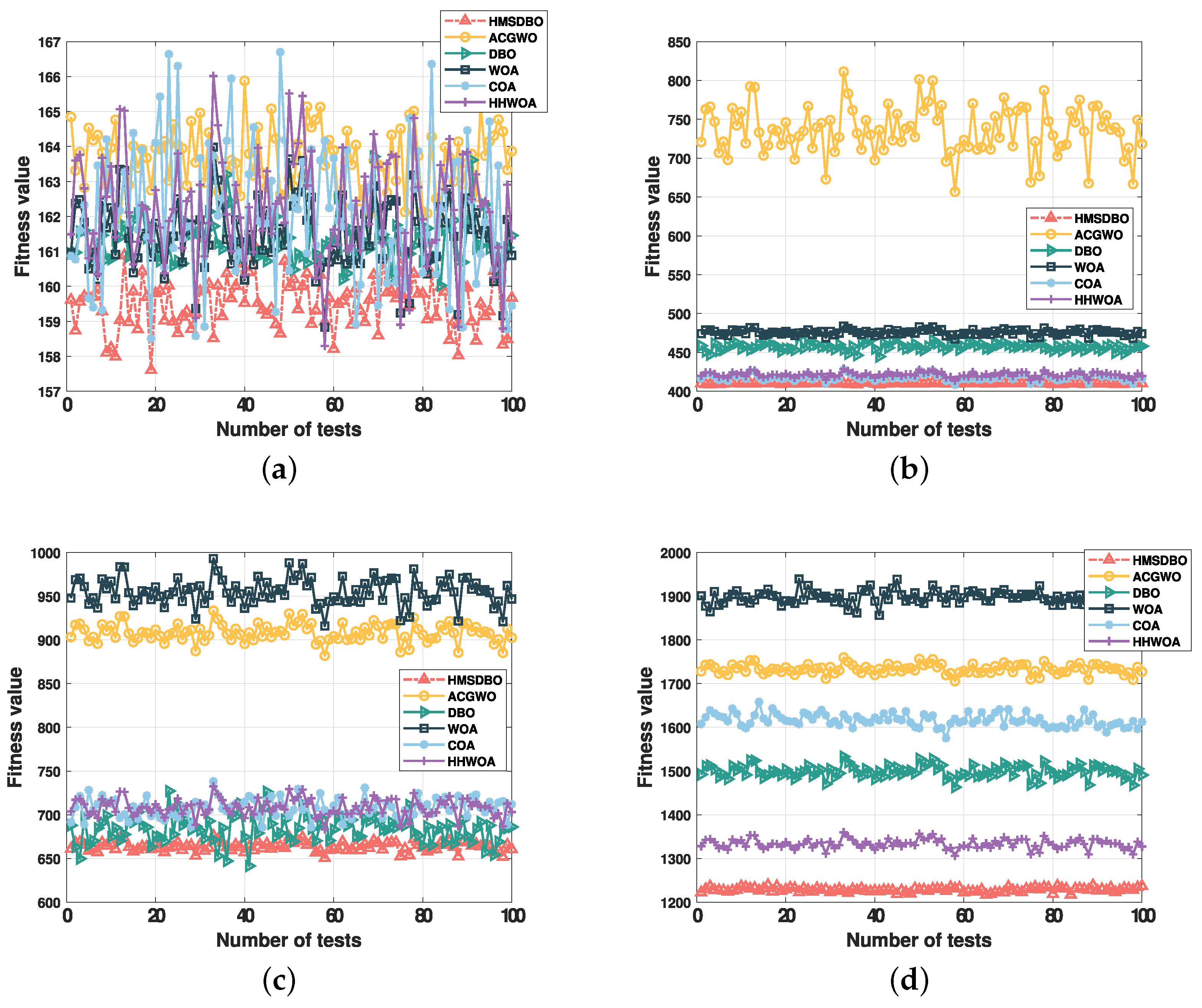
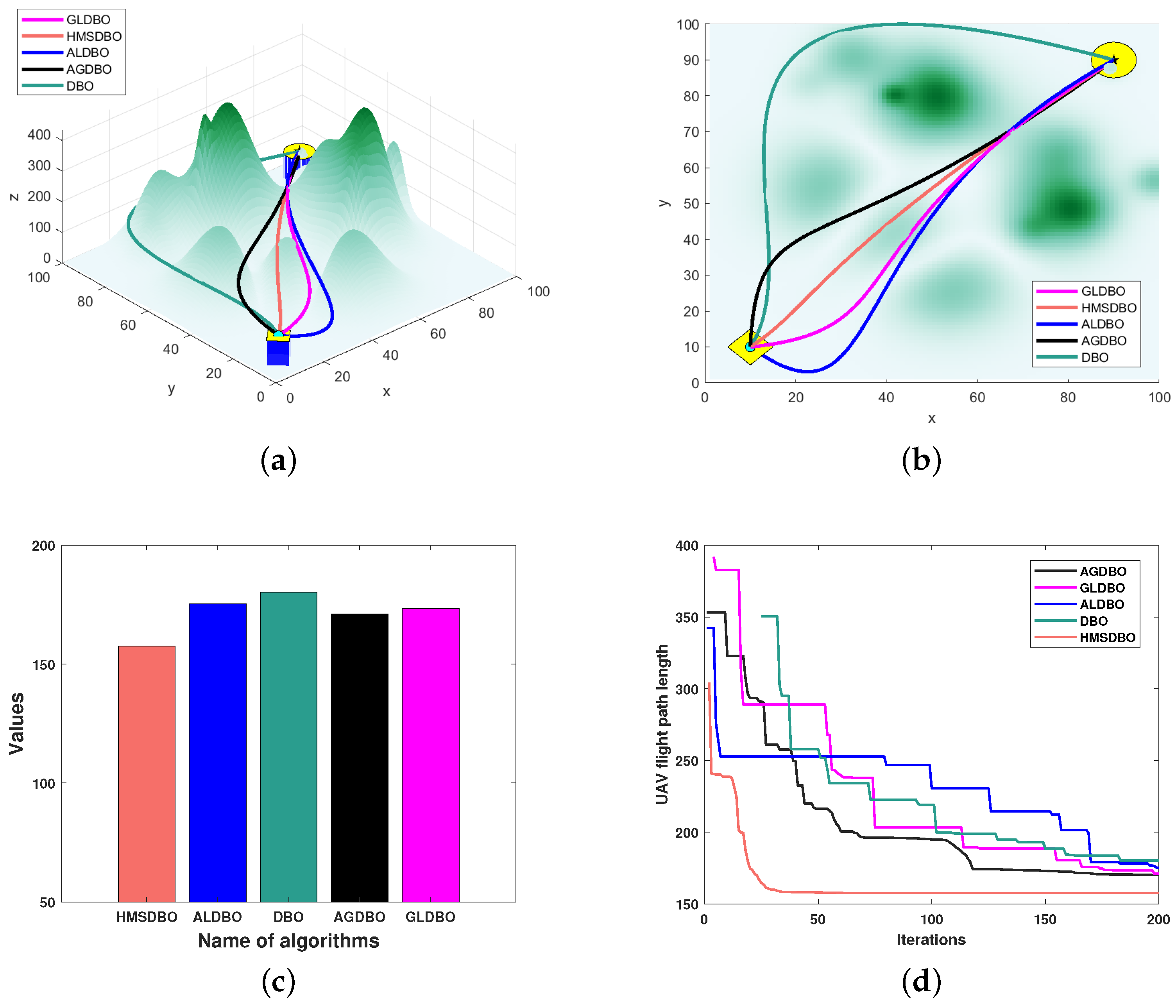
- A comprehensive set of simulation-based validations is designed to evaluate the performance of HMSDBO in UAV path planning optimization. Simulation results demonstrate that HMSDBO outperforms several algorithms, including ACGWO, DBO, WOA, COA, and HHWOA. Specifically, HMSDBO reduces path lengths by at least 4.2% while significantly enhancing path smoothness.
2. Related Work
2.1. Traditional Path Planning Algorithms
2.2. Group Intelligence Algorithms for Path Planning
2.3. Motivation
3. Three-Dimensional UAV Path Planning Model Design
3.1. Flight Path and Smoothing
3.1.1. Path Smoothing Basis Functions
3.1.2. Curve Interpolation
3.1.3. Constraints
- To ensure that the flight path remains within the specified airspace, the following constraints must be met:
- To avoid the collision of the drone with obstacles within the terrain, it needs to be satisfied:
3.1.4. Energy Consumption Model
3.1.5. Objective Function
4. Three-Dimensional Agricultural UAV Path Planning Based on HMSDBO
4.1. Dung Beetle Optimization Algorithm
- (1)
- Dung Beetle Roller
- (2)
- Breeding Dung Beetles
- (3)
- Dung beetle
- (4)
- Stealing Dung Beetles
4.2. Latin Hypercube Sampling Strategy for Initializing Populations
4.3. Gold Sine Strategy
4.4. Hybrid Adaptive Weighting Strategy
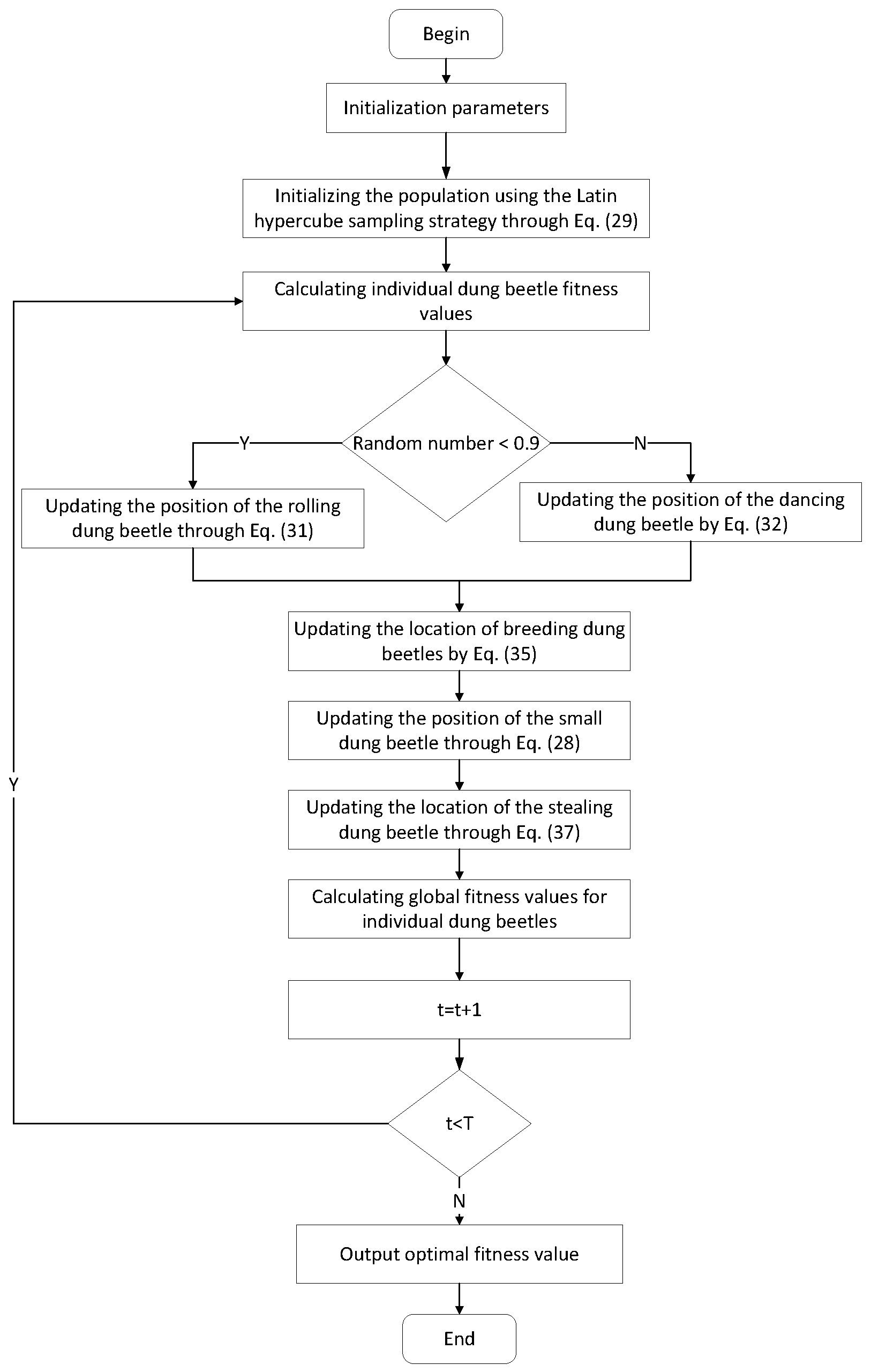
| Algorithm 1: Algorithm flowchart of HMSDBO |
| Input: Population size n Maximum number of iterations T Current iteration t Starting point x End point y Output: Optimal fitness value Initialize parameters Perform Latin hypercube sampling for initializing populations 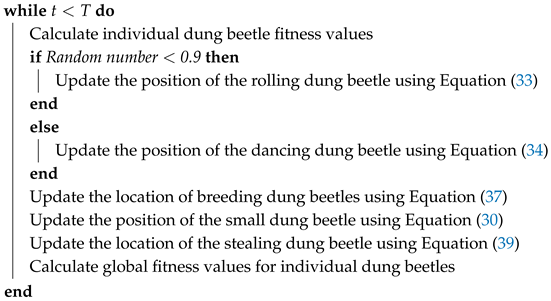 return Return the optimal UAV path return Return the optimal UAV path |
4.5. Complexity Analysis
- (1)
- Population Initialization
- (2)
- Fitness Evaluation
- (3)
- Position Update
- (4)
- Global Search and Convergence
5. Simulation-Based Validation
5.1. Operating Environment
5.2. Testing of Path Planning Algorithms for Agricultural UAV
5.3. Simulation Results and Analysis
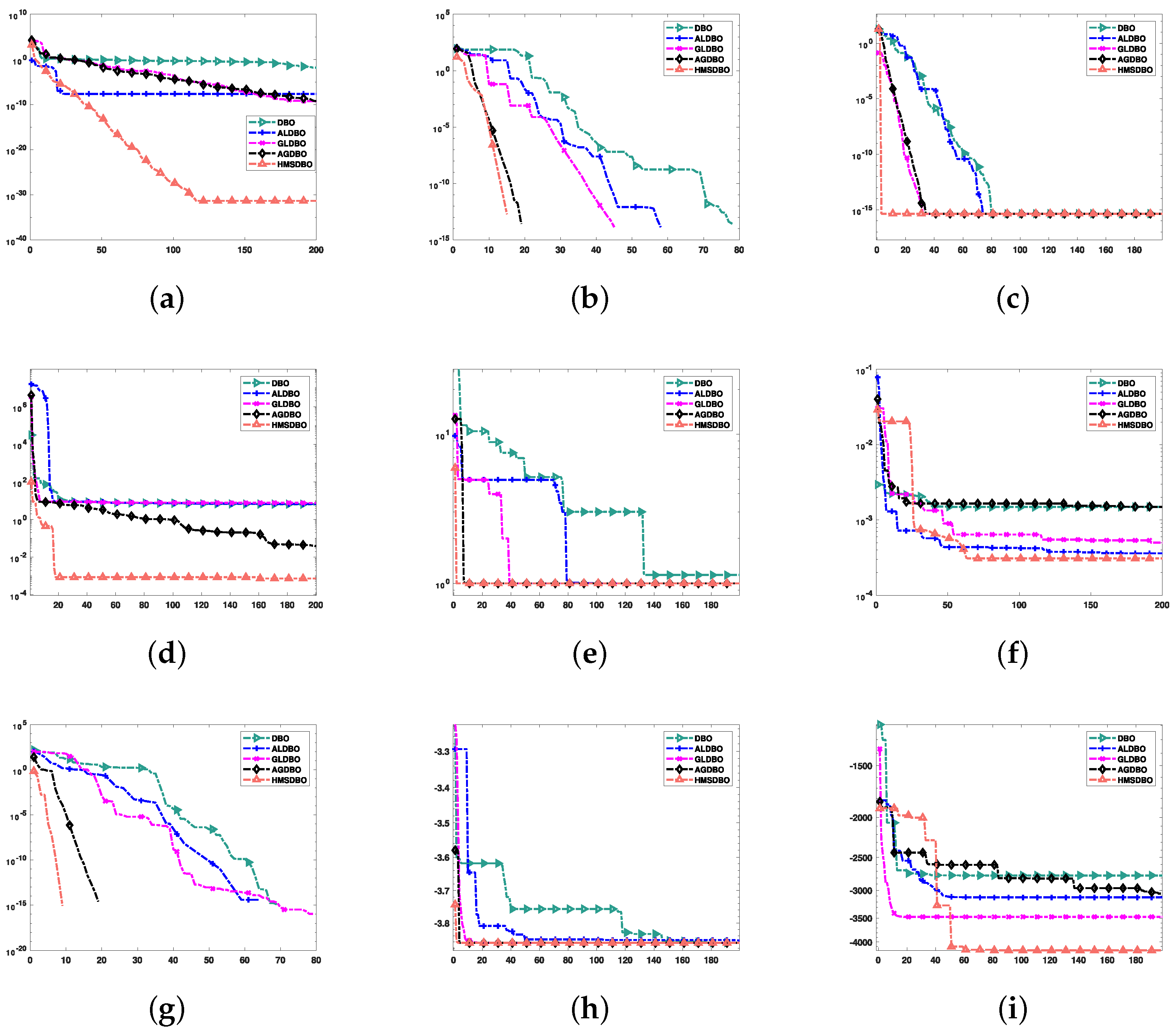
5.4. Ablation Experiments
5.5. Discussion
- (1)
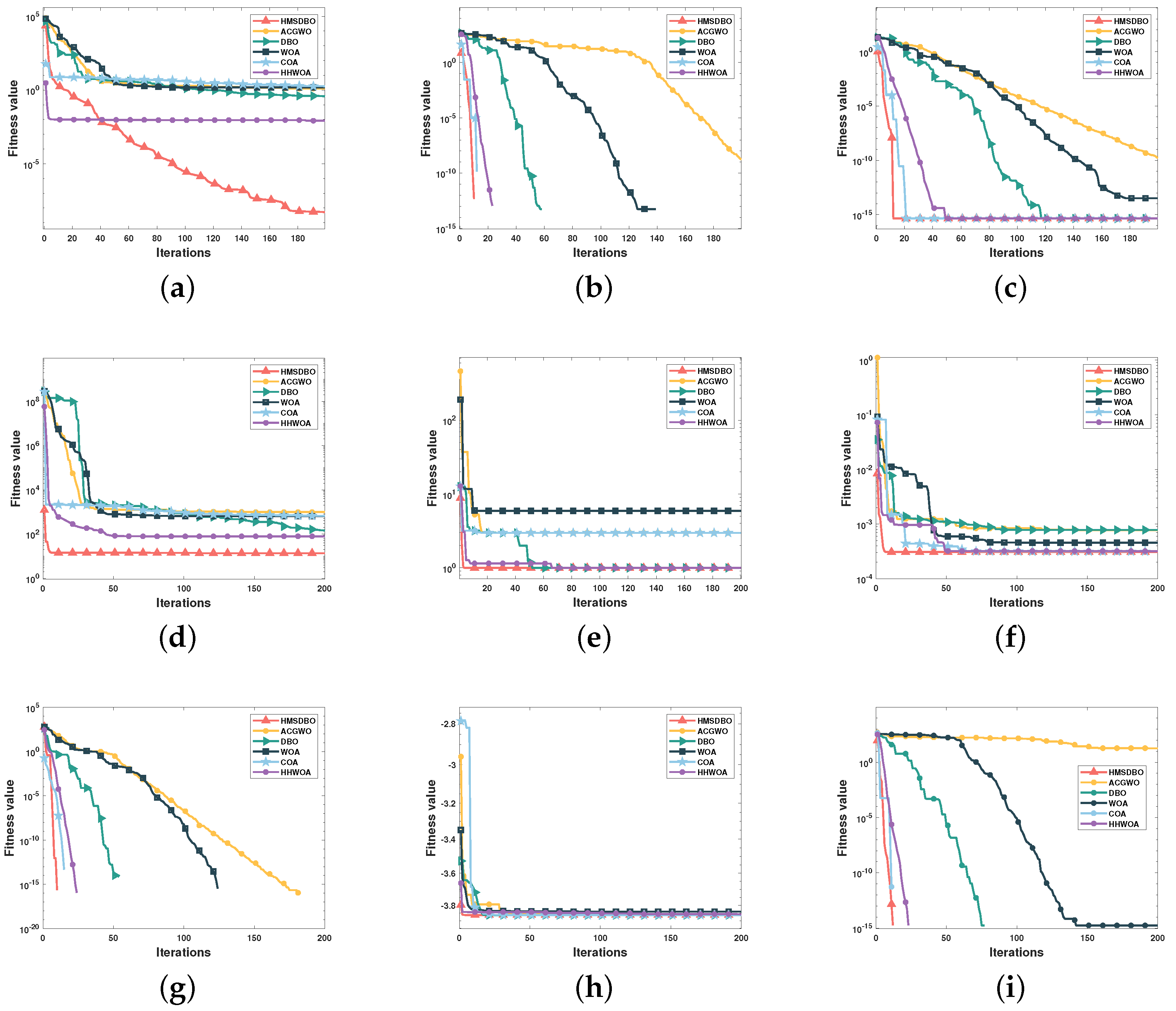
- Algorithm Performance: The HMSDBO algorithm outperforms several benchmark algorithms, including ACGWO, DBO, WOA, COA, and HHWOA, in terms of both path length reduction and path smoothness. The integration of hybrid strategies, such as Latin Hypercube Sampling (LHS) and Hybrid Adaptive Weighting, contributes to the improved exploration and exploitation capabilities of HMSDBO.
- (2)
- Convergence Rate: HMSDBO exhibited faster convergence compared to the other algorithms. This efficiency is due to the algorithm’s ability to balance global search and local refinement, allowing it to quickly find high-quality solutions while maintaining stability.
- (3)
- Real-World Relevance: The improvements in path length and smoothness demonstrate HMSDBO’s potential for real-world applications, especially in UAV operations, where efficient path planning is crucial. The algorithm’s ability to adapt to obstacles and dynamic environments further supports its applicability in agricultural UAVs.
- (4)
- Limitations and Future Work: Despite promising results, HMSDBO’s performance could be improved in highly dynamic environments, such as real-time path replanning scenarios. Future research could focus on enhancing HMSDBO’s scalability and robustness, particularly in large-scale UAV systems and complex real-world conditions.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, C.; Zheng, Z.; Xu, T.; Guo, S.; Feng, S.; Yao, W.; Lan, Y. Yolo-based uav technology: A review of the research and its applications. Drones 2023, 7, 190. [Google Scholar] [CrossRef]
- Samad, A.M.; Kamarulzaman, N.; Hamdani, M.A.; Mastor, T.A.; Hashim, K.A. The potential of Unmanned Aerial Vehicle (UAV) for civilian and mapping application. In Proceedings of the 2013 IEEE 3rd International Conference on System Engineering and Technology, Shah Alam, Malaysia, 19–20 August 2013; IEEE: New York, NY, USA, 2013; pp. 313–318. [Google Scholar]
- Cienciała, A.; Sobura, S.; Sobolewska-Mikulska, K. Optimising land consolidation by implementing UAV technology. Sustainability 2022, 14, 4412. [Google Scholar] [CrossRef]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of remote sensing in precision agriculture: A review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Chamas, M.H.; Amine, S.; Gazo Hanna, E.; Mokhiamar, O. Control of a novel parallel mechanism for the stabilization of unmanned aerial vehicles. Appl. Sci. 2023, 13, 8740. [Google Scholar] [CrossRef]
- Latifinavid, M.; Azizi, A. Kinematic modelling and position control of a 3-DOF parallel stabilizing robot manipulator. J. Intell. Robot. Syst. 2023, 107, 17. [Google Scholar] [CrossRef]
- Chamas, M.H.; Amine, S.; Gazo-Hanna, E.; El Gohary, M. AI-Driven Kinematics and Experimental Control of 3-SRR Mechanism for UAV Stabilization. Results Eng. 2025, 26, 105131. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Ait Saadi, A.; Soukane, A.; Meraihi, Y.; Benmessaoud Gabis, A.; Mirjalili, S.; Ramdane-Cherif, A. UAV path planning using optimization approaches: A survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Müller, H.; Niculescu, V.; Polonelli, T.; Magno, M.; Benini, L. Robust and efficient depth-based obstacle avoidance for autonomous miniaturized uavs. IEEE Trans. Robot. 2023, 39, 4935–4951. [Google Scholar] [CrossRef]
- Wang, L.; Lan, Y.; Zhang, Y.; Zhang, H.; Tahir, M.N.; Ou, S.; Liu, X.; Chen, P. Applications and prospects of agricultural unmanned aerial vehicle obstacle avoidance technology in China. Sensors 2019, 19, 642. [Google Scholar] [CrossRef]
- Froese, V.; Hertrich, C. Training neural networks is NP-hard in fixed dimension. Adv. Neural Inf. Process. Syst. 2023, 36, 44039–44049. [Google Scholar]
- Dudeja, C.; Kumar, P. An improved weighted sum-fuzzy Dijkstra’s algorithm for shortest path problem (iWSFDA). Soft Comput. 2022, 26, 3217–3226. [Google Scholar] [CrossRef]
- Li, B.; Chen, B. An adaptive rapidly-exploring random tree. IEEE/CAA J. Autom. Sin. 2021, 9, 283–294. [Google Scholar] [CrossRef]
- Goel, L. An extensive review of computational intelligence-based optimization algorithms: Trends and applications. Soft Comput. 2020, 24, 16519–16549. [Google Scholar] [CrossRef]
- Tang, J.; Liu, G.; Pan, Q. A review on representative swarm intelligence algorithms for solving optimization problems: Applications and trends. IEEE/CAA J. Autom. Sin. 2021, 8, 1627–1643. [Google Scholar] [CrossRef]
- Liu, R.; Mo, Y.; Lu, Y.; Lyu, Y.; Zhang, Y.; Guo, H. Swarm-intelligence optimization method for dynamic optimization problem. Mathematics 2022, 10, 1803. [Google Scholar] [CrossRef]
- Ramírez-Ochoa, D.D.; Pérez-Domínguez, L.A.; Martínez-Gómez, E.A.; Luviano-Cruz, D. PSO, a swarm intelligence-based evolutionary algorithm as a decision-making strategy: A review. Symmetry 2022, 14, 455. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar] [CrossRef]
- Ye, M.; Zhou, H.; Yang, H.; Hu, B.; Wang, X. Multi-strategy improved dung beetle optimization algorithm and its applications. Biomimetics 2024, 9, 291. [Google Scholar] [CrossRef]
- Huang, Q.; Sun, Y.; Kang, C.; Fan, C.; Liang, X.; Sun, F. An Improved Crayfish Optimization Algorithm: Enhanced Search Efficiency and Application to UAV Path Planning. Symmetry 2025, 17, 356. [Google Scholar] [CrossRef]
- Rana, N.; Latiff, M.S.A.; Abdulhamid, S.M.; Chiroma, H. Whale optimization algorithm: A systematic review of contemporary applications, modifications and developments. Neural Comput. Appl. 2020, 32, 16245–16277. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, M.; Low, K.H. 3D path planning and real-time collision resolution of multirotor drone operations in complex urban low-altitude airspace. Transp. Res. Part C Emerg. Technol. 2021, 129, 103123. [Google Scholar] [CrossRef]
- Chen, J.; Li, M.; Yuan, Z.; Gu, Q. An improved A* algorithm for UAV path planning problems. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; IEEE: New York, NY, USA, 2020; Volume 1, pp. 958–962. [Google Scholar]
- Bai, X.; Jiang, H.; Cui, J.; Lu, K.; Chen, P.; Zhang, M. UAV path planning based on improved A* and DWA algorithms. Int. J. Aerosp. Eng. 2021, 2021, 4511252. [Google Scholar] [CrossRef]
- Mandloi, D.; Arya, R.; Verma, A.K. Unmanned aerial vehicle path planning based on A* algorithm and its variants in 3D environment. Int. J. Syst. Assur. Eng. Manag. 2021, 12, 990–1000. [Google Scholar] [CrossRef]
- Dhulkefl, E.; Durdu, A.; Terzioğlu, H. Dijkstra algorithm using UAV path planning. Konya J. Eng. Sci. 2020, 8, 92–105. [Google Scholar] [CrossRef]
- Guo, J.; Xia, W.; Hu, X.; Ma, H. Feedback RRT* algorithm for UAV path planning in a hostile environment. Comput. Ind. Eng. 2022, 174, 108771. [Google Scholar] [CrossRef]
- Fan, J.; Chen, X.; Wang, Y.; Chen, X. UAV trajectory planning in cluttered environments based on PF-RRT* algorithm with goal-biased strategy. Eng. Appl. Artif. Intell. 2022, 114, 105182. [Google Scholar] [CrossRef]
- Avcu, M.E.; Gökçe, H.; Şahin, İ. A WOA-based path planning approach for UAVs to avoid collisions in cluttered areas. In Handbook of Whale Optimization Algorithm; Elsevier: Amsterdam, The Netherlands, 2024; pp. 449–461. [Google Scholar]
- Yu, B.; Fan, S.; Cui, W.; Xia, K.; Wang, L. A Multi-UAV cooperative mission planning method based on SA-WOA algorithm for three-dimensional space atmospheric environment detection. Robotica 2024, 42, 1–38. [Google Scholar] [CrossRef]
- Liu, X.; Li, G.; Yang, H.; Zhang, N.; Wang, L.; Shao, P. Agricultural UAV trajectory planning by incorporating multi-mechanism improved grey wolf optimization algorithm. Expert Syst. Appl. 2023, 233, 120946. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, S.; Wu, F.; Wang, Y. Path planning of UAV based on improved adaptive grey wolf optimization algorithm. IEEE Access 2021, 9, 89400–89411. [Google Scholar] [CrossRef]
- Shen, Q.; Zhang, D.; Xie, M.; He, Q. Multi-strategy enhanced dung beetle optimizer and its application in three-dimensional UAV path planning. Symmetry 2023, 15, 1432. [Google Scholar] [CrossRef]
- Lyu, L.; Jiang, H.; Yang, F. Improved Dung Beetle Optimizer Algorithm with Multi-Strategy for global optimization and UAV 3D path planning. IEEE Access 2024, 12, 69240–69257. [Google Scholar] [CrossRef]
- Li, F.F.; Du, Y.; Jia, K.J. Path planning and smoothing of mobile robot based on improved artificial fish swarm algorithm. Sci. Rep. 2022, 12, 659. [Google Scholar] [CrossRef] [PubMed]
- Tripicchio, P.; Unetti, M.; D’Avella, S.; Avizzano, C.A. Smooth coverage path planning for UAVs with model predictive control trajectory tracking. Electronics 2023, 12, 2310. [Google Scholar] [CrossRef]
- Liu, Z.; Wen, S.; Huang, G.; Li, S.; Deng, Z. Agricultural UAV obstacle avoidance system based on a depth image inverse projection algorithm and B-spline curve trajectory optimization algorithm. Inf. Technol. Control 2024, 53, 736–757. [Google Scholar]
- Liu, M.; Zhang, H.; Yang, J.; Zhang, T.; Zhang, C.; Bo, L. A path planning algorithm for three-dimensional collision avoidance based on potential field and B-spline boundary curve. Aerosp. Sci. Technol. 2024, 144, 108763. [Google Scholar] [CrossRef]
- Tanyildizi, E.; Demir, Y. Golden sine algorithm: A novel nature-inspired optimization algorithm. Adv. Electr. Comput. Eng. 2017, 17, 71–78. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Character | Description |
|---|---|
| Path start | |
| Path end | |
| The position of each dung beetle on the path | |
| n | The number of dung beetles |
| The control points of the flight path | |
| The basis function of the spline | |
| h | The power of the B-spline function |
| The coordinates of the control points | |
| The total cost to bypass obstacles | |
| The cost of flying within the specified boundaries | |
| The total distance from start to end point |
| Name | Model Number |
|---|---|
| CPU | i7-7700HQ CPU @ 2.80 GHz |
| Random access memory | 32.0 GB |
| Operating system | Windows11 |
| Programming language | Matlab |
| Test software | Matlab R2021a |
| Simulation Area (X, Y, Z) | Start Point | End Point | Number of Peaks |
|---|---|---|---|
| 5 | |||
| 10 | |||
| 20 | |||
| 30 |
| Algorithm Name | Iterations | Algorithm Parameters |
|---|---|---|
| 200 | The update coefficient b decreases linearly from 2 to 0 | |
| 200 | b = 1, k = 0.3 | |
| 200 | b = 1 | |
| 200 | , | |
| 200 | b = 1 F = 0.5 CR = 0.9 |
| Function Expression | Dimension | Limits |
|---|---|---|
| 10 | [−100, 100] | |
| 10 | [−5.12, 5.12] | |
| 10 | [−32, 32] | |
| 10 | [−30, 30] | |
| 2 | [−65.536, 65.536] | |
| 4 | [−5, 5] | |
| 10 | [−600, 600] | |
| 3 | [0, 1] | |
| 30 | [−500, 500] |
| Test Function | Statistical Metric | HMSDBO | ACGWO | DBO | WOA | COA | HHWOA |
|---|---|---|---|---|---|---|---|
| F1 | Min | ||||||
| Mean | |||||||
| Std | |||||||
| F2 | Min | ||||||
| Mean | |||||||
| Std | |||||||
| F3 | Min | ||||||
| Mean | |||||||
| Std | |||||||
| F4 | Min | ||||||
| Mean | |||||||
| Std | |||||||
| F5 | Min | ||||||
| Mean | |||||||
| Std | |||||||
| F6 | Min | ||||||
| Mean | |||||||
| Std | |||||||
| F7 | Min | ||||||
| Mean | |||||||
| Std | |||||||
| F8 | Min | ||||||
| Mean | |||||||
| Std | |||||||
| F9 | Min | ||||||
| Mean | |||||||
| Std |
| Function Expression | ACGWO | DBO | WOA | COA | HHWOA |
|---|---|---|---|---|---|
| F1 | |||||
| F2 | 1 | 0.0056 | 1 | 1 | |
| F3 | 1 | 1 | 1 | ||
| F4 | |||||
| F5 | 0.0303 | ||||
| F6 | |||||
| F7 | 0.0056 | 0.3337 | 0.0419 | 1 | 1 |
| F8 | |||||
| F9 | 0.0470 | 0.0154 | 0.0777 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fei, H.; Liu, R.; Dong, L.; Du, Z.; Liu, X.; Luo, T.; Zhou, J. Three-Dimensional Path Planning for Unmanned Aerial Vehicles Based on Hybrid Multi-Strategy Dung Beetle Optimization Algorithm. Agriculture 2025, 15, 1156. https://doi.org/10.3390/agriculture15111156
Fei H, Liu R, Dong L, Du Z, Liu X, Luo T, Zhou J. Three-Dimensional Path Planning for Unmanned Aerial Vehicles Based on Hybrid Multi-Strategy Dung Beetle Optimization Algorithm. Agriculture. 2025; 15(11):1156. https://doi.org/10.3390/agriculture15111156
Chicago/Turabian StyleFei, Hongmei, Ruru Liu, Leilei Dong, Zhaohui Du, Xuening Liu, Tao Luo, and Jie Zhou. 2025. "Three-Dimensional Path Planning for Unmanned Aerial Vehicles Based on Hybrid Multi-Strategy Dung Beetle Optimization Algorithm" Agriculture 15, no. 11: 1156. https://doi.org/10.3390/agriculture15111156
APA StyleFei, H., Liu, R., Dong, L., Du, Z., Liu, X., Luo, T., & Zhou, J. (2025). Three-Dimensional Path Planning for Unmanned Aerial Vehicles Based on Hybrid Multi-Strategy Dung Beetle Optimization Algorithm. Agriculture, 15(11), 1156. https://doi.org/10.3390/agriculture15111156