1. Introduction
With the continuous advancement of precision agriculture and intelligent agricultural machinery technology, the demand for high-precision positioning in fields such as automated seeding and unmanned spraying is constantly increasing. In these application scenarios, agricultural machinery needs to obtain accurate location information to ensure the smooth operation of automation. However, most orchard environments often have dense crops, tall vegetation, and complex terrain, which frequently cause Global Navigation Satellite System (GNSS) signals to be obstructed, thus affecting positioning accuracy [
1]. Although GNSSs can provide high-precision geographic location information, their limitations under signal loss or obstruction remain a major bottleneck for efficient operation of intelligent agricultural machinery. In complex environments like forests, the dense trees and shifting vegetation make GNSS signals prone to blocking or reflection, severely affecting positioning accuracy. Furthermore, the GNSS update frequency decreases in such complex environments, and once the signal is interrupted, the navigation system may fail to operate properly [
2]. To address this issue, many researchers have proposed sensor fusion solutions. Jiang et al. proposed integrating Light Detection And Ranging (LiDAR) sensor data, which improved the accuracy of the traditional Global Navigation Satellite System and Inertial Navigation System (GNSS/INS) integration system by 70.4% [
3], effectively compensating for the deficiencies of single sensors and improving the robustness and accuracy of navigation systems.
However, traditional visual navigation methods face similar challenges. In complex farmland or densely planted environments, due to factors such as lighting changes and plant obstruction, visual navigation often fails to provide sufficient positioning accuracy, which presents significant challenges for vision-based autonomous navigation systems [
4]. Especially in forest environments, due to ground and canopy obstructions, the effectiveness of visual information is greatly reduced, making image processing and target recognition difficult [
5]. Therefore, achieving efficient and precise positioning in complex environments where GNSS signals are lost has become a key issue in the development of intelligent agricultural machinery technology.
Inertial Navigation Systems (INSs) provide an effective auxiliary positioning technology that can offer continuous navigation capabilities in the absence of GNSS signals [
6]. Unlike traditional GNSSs, INSs do not rely on external signals but estimate position and attitude through embedded accelerometers and gyroscopes. However, the accuracy of the inertial measurement unit (IMU) is affected by accumulated errors over time, especially during long-duration navigation. Liu et al. confirmed that IMU errors grow linearly and without bounds over time, with displacement errors reaching several tens of meters within 10 s [
7]. Yang et al. found that accumulated errors make the static process noise model ineffective in complex dynamic environments [
8].
Currently, integrated GNSS and INS navigation systems have become the mainstream positioning technology. By combining the high-precision positioning of GNSSs with the continuous navigation capability of INSs, efficient positioning can be achieved in various complex environments [
9]. However, GNSS signals are often lost due to multipath effects, building obstructions, extreme weather, and other factors [
10], and INS may accumulate errors over long-term use, leading to a decline in positioning accuracy [
11]. Additionally, in relevant environments, GNSS signals are often disturbed by dense vegetation, while INS systems are prone to error accumulation in the absence of external update signals, resulting in a significant decrease in location accuracy [
12].
To mitigate the impact of GNSS signal loss, numerous studies have proposed filtering methods based on the fusion of INS and GNSS, such as Kalman Filtering (KF), Unscented Kalman Filtering (UKF), and Extended Kalman Filtering (EKF). Kaviani compared the attitude estimation errors of KF, PF, EKF, and UKF methods, concluding that their performance outperforms INS/GNSS integration systems [
13]. Hu et al. introduced the MP-UKF method, which utilizes a model-predictive filter to establish a dynamic model for error estimation, improving the adaptive capability of UKF, and reducing position errors by 2–5 m [
14]. However, these filtering methods still encounter issues with low accuracy and poor convergence when handling highly nonlinear dynamic systems. Therefore, in response to the demand for high precision and reliability, the focus of research has shifted to effectively fusing sensor data to enhance positioning accuracy and overcome the limitations of individual systems, particularly in complex, densely vegetated forest environments.
The impact of process noise on position updates in KF is significant, and optimizing noise models in agricultural dynamic environments has become a key research direction in smart agricultural machinery navigation technology. To address this challenge, researchers have proposed various Adaptive Kalman Filtering (AKF) methods and deep learning fusion approaches. These methods dynamically adjust process noise parameters, improving system adaptability to environmental changes, especially in environments where GNSS signals are hindered or heavily interfered with. With the advancement of deep learning technologies, models like Long Short-Term Memory networks (LSTM), Gated Recurrent Units (GRUs) [
15], and Transformer [
16] models have shown remarkable abilities in handling time-series data. In INS and GNSS integrated navigation systems, these models have become crucial tools for enhancing positioning accuracy and robustness.
Cohen et al. proposed the A-KIT (Adaptive Kalman-Informed Transformer) framework, which introduces a Set Transformer network structure to dynamically regress the process noise covariance matrix, significantly improving positioning accuracy in INS fusion systems [
16]. Fang et al. proposed an LSTM-based INS method to enhance integrated navigation performance in GNSS signal loss environments, achieving a 95% improvement in positioning accuracy over pure INS navigation during GNSS outages [
17]. Additionally, Wang et al. introduced the Online Semi-Supervised Transformer model, which maintains positioning accuracy to some extent during GNSS signal disruptions, though with a maximum error of 9.81 m [
18]. In agriculture, Zheng et al. used a hybrid GRU–Transformer model to enhance soil moisture prediction accuracy, demonstrating its clear advantages for short-term forecasting. The strength of this fusion lies in combining the GRU’s efficiency in handling time-series data and capturing local dependencies with the Transformer’s self-attention mechanism for modeling global context, thereby achieving higher prediction accuracy and robustness in complex tasks [
19]. These studies demonstrate that deep learning models, especially LSTM, GRUs, and Transformer, can effectively model the temporal features and complex relationships between sensor data in INS/GNSS integrated navigation systems, offering novel solutions to positioning challenges caused by GNSS signal loss or obstruction.
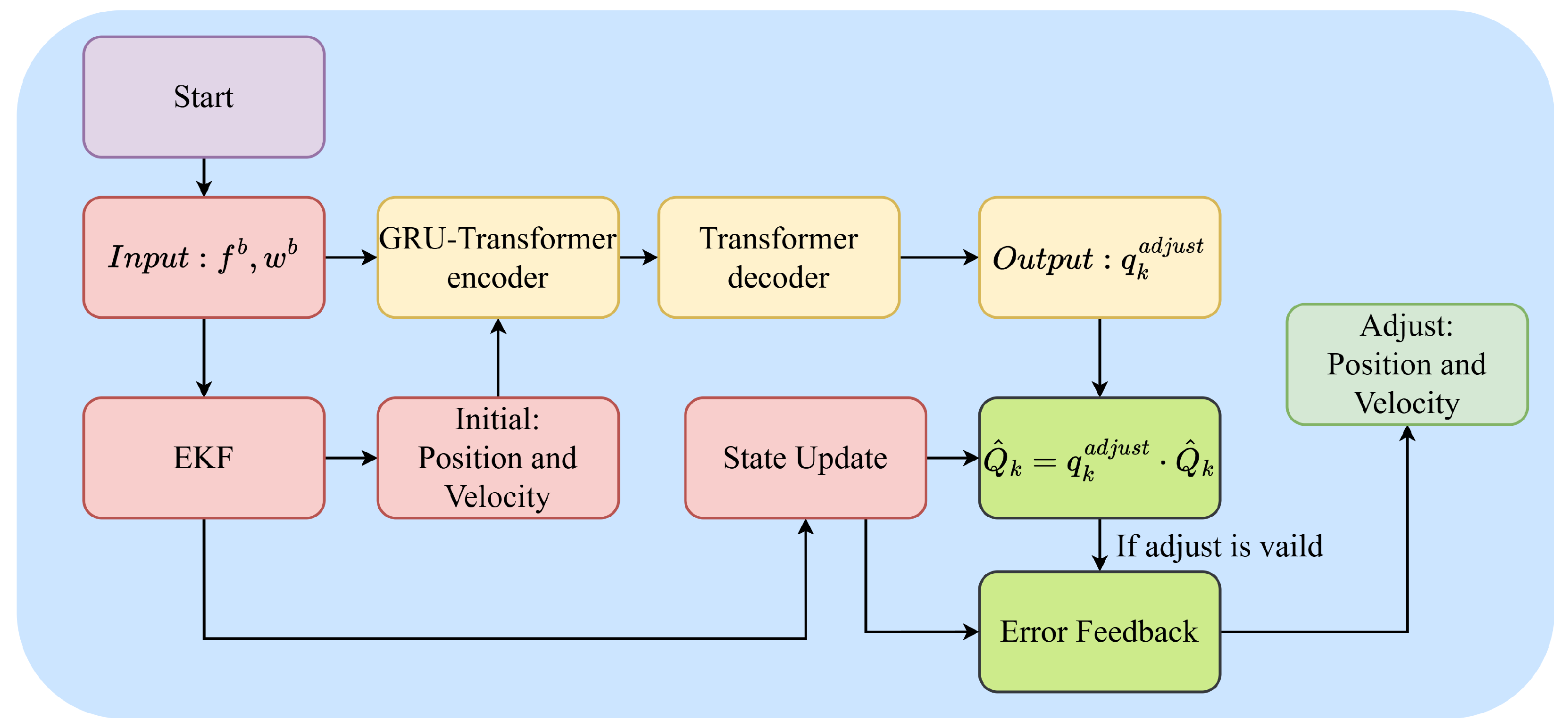
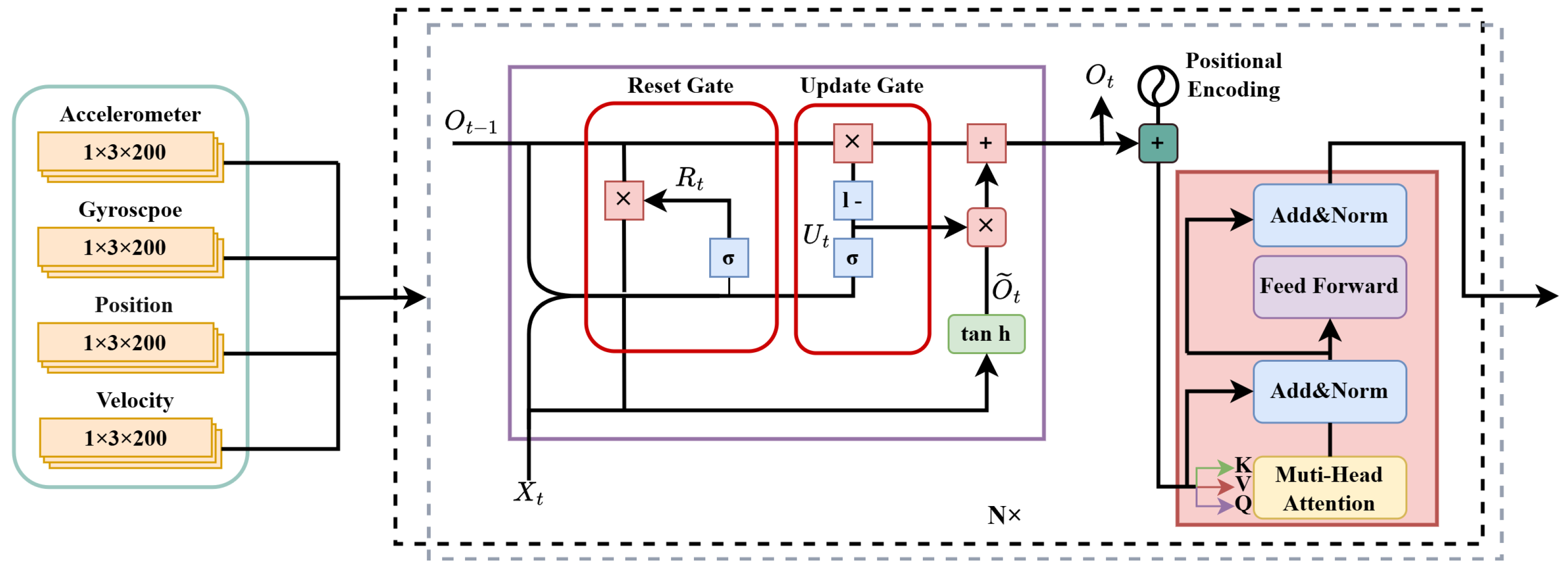
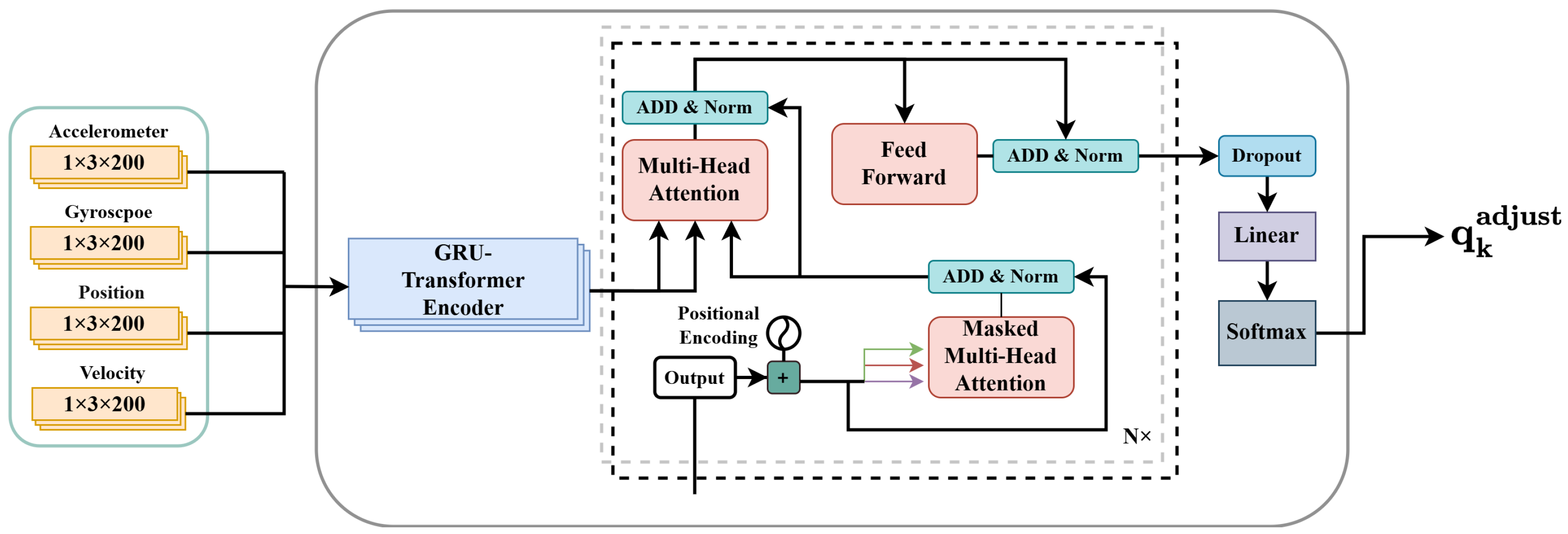
This paper proposes a hybrid model based on a Gated Recurrent Unit (GRU) and Transformer architecture (hereafter referred to as GRU-T for convenience) to optimize EKF performance in complex environments such as forests. Compared to traditional EKF methods, the key contribution of this work lies in the introduction of deep learning models, GRU and Transformer, to dynamically correct process noise, reducing error accumulation caused by long-term dependencies and nonlinearity. By combining GRUs and Transformer, the model can simultaneously capture both short-term and long-term dependencies in temporal sequences, significantly improving the accuracy and robustness of GNSS/INS integrated navigation systems.The main contributions of this paper can be summarized as follows:
- 1.
A noise correction method based on the combination of a GRU and Transformer is proposed to address the inadequacies of traditional EKF assumptions on process noise in dynamic environments, as illustrated in
Figure 1;
- 2.
The method’s effectiveness in complex environments, particularly in cases of GNSS signal blockage and error accumulation, is experimentally validated, demonstrating significant improvements in positioning accuracy;
- 3.
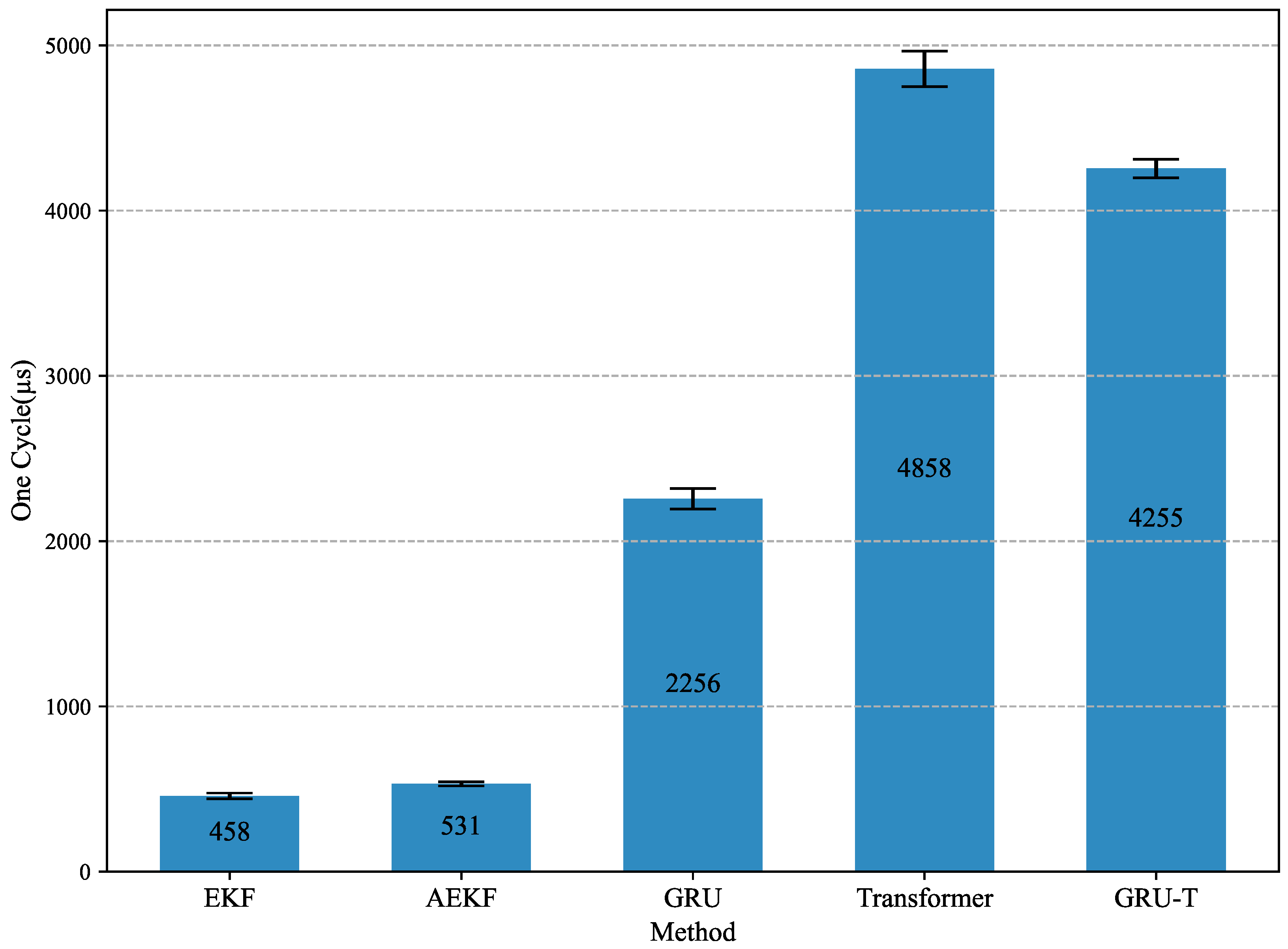
The approach strikes a good balance between real-time performance and computational efficiency, meeting the demands of high-frequency sampling in real-time applications.
5. Conclusions
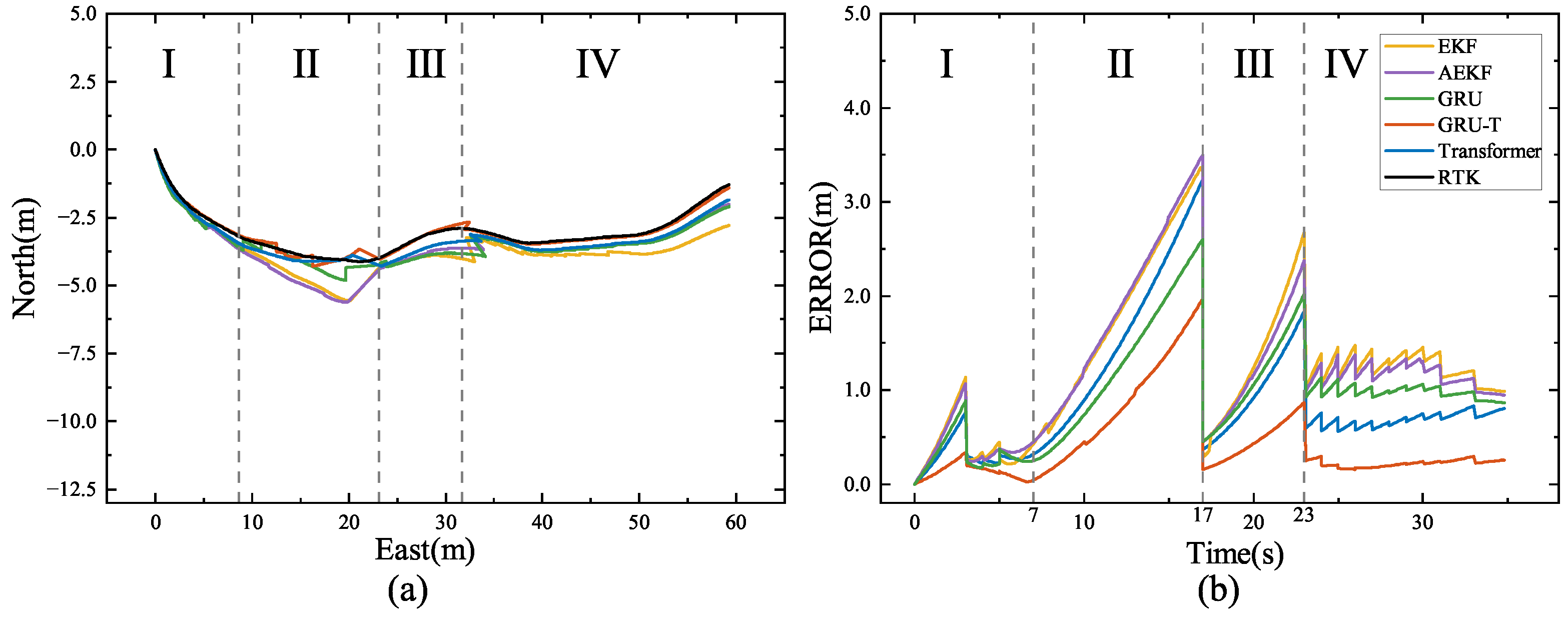
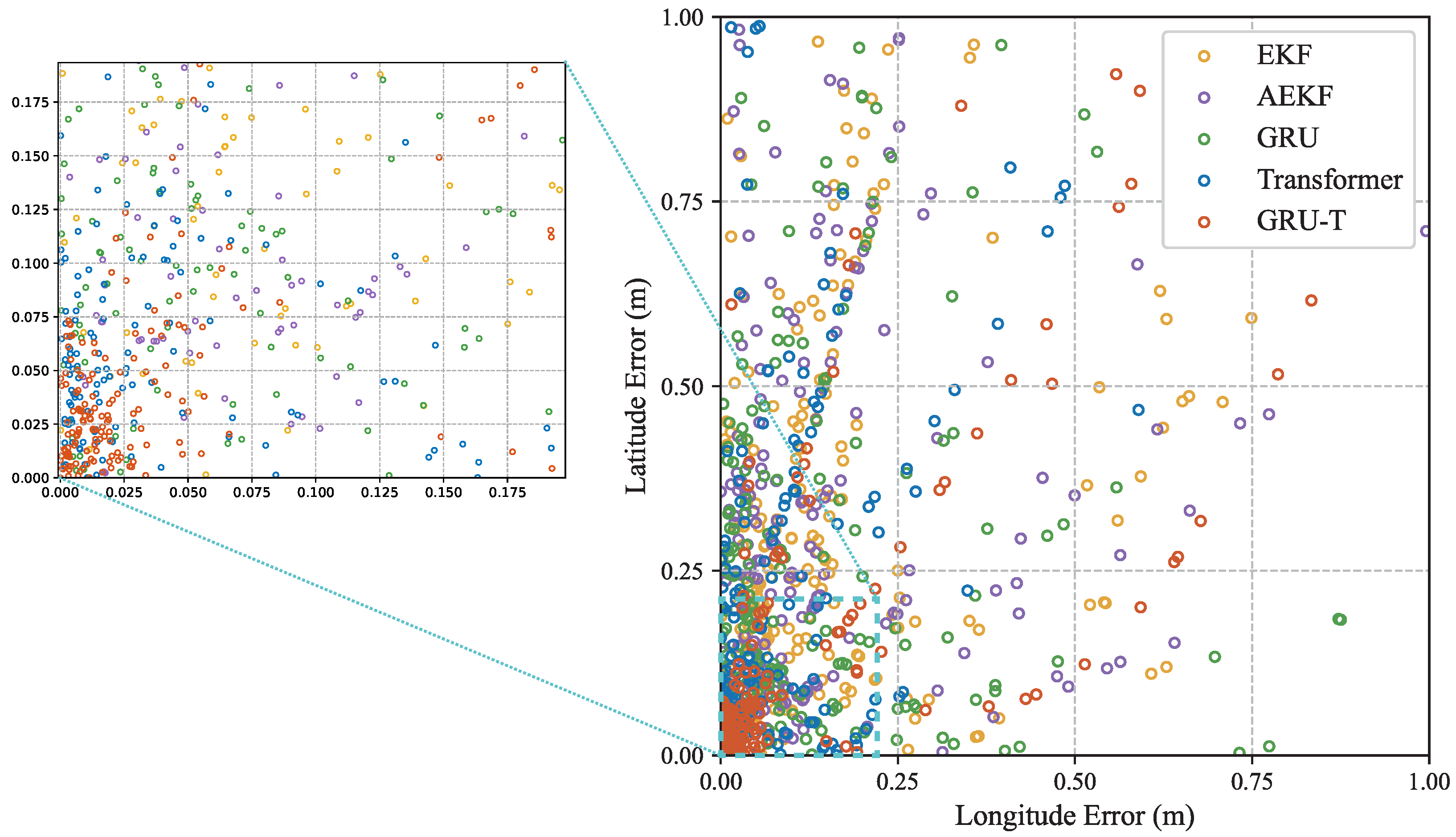
This study proposes a GNSS/INS integrated navigation optimization method based on the GRU–Transformer hybrid model, particularly suitable for environments with unreliable GNSS signals, such as dense orchards and forests. This model utilizes deep learning technologies, including a GRU and Transformer, to dynamically adjust the process noise covariance matrix in EKF, addressing the limitations of traditional EKF methods in handling non-stationary noise and signal loss. Experimental results show that the proposed hybrid model significantly improves positioning accuracy. Compared to the traditional EKF method, its PRMSE in the east, north, and upward directions decreased by 48.74%, 41.94%, and 61.59%, respectively, and its VRMSE was reduced by 71.5%, 39.31%, and 56.48% in the east, north, and upward directions. The GRU–Transformer model effectively handles long-term dependencies and adapts to dynamic environments, showing significant performance improvements in GNSS signal degradation scenarios. The algorithm’s efficiency in real-time applications has also been validated, meeting the computational demands of high-frequency sampling rates while maintaining real-time operation and improving accuracy. This study provides an effective technical approach for high-precision autonomous navigation of intelligent agricultural equipment in complex operating environments such as densely planted orchards and under-forest areas. By optimizing multi-sensor data fusion through deep learning, it delivers reliable positioning information even when GNSS signals are limited, offering a feasible strategy for autonomous navigation, path optimization, and precision operations of agricultural machinery.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}