
Design and Experiment of Oil-Electric Hybrid Air-Suction Sorghum Plot Seeder


Abstract
1. Introduction
2. Materials and Methods
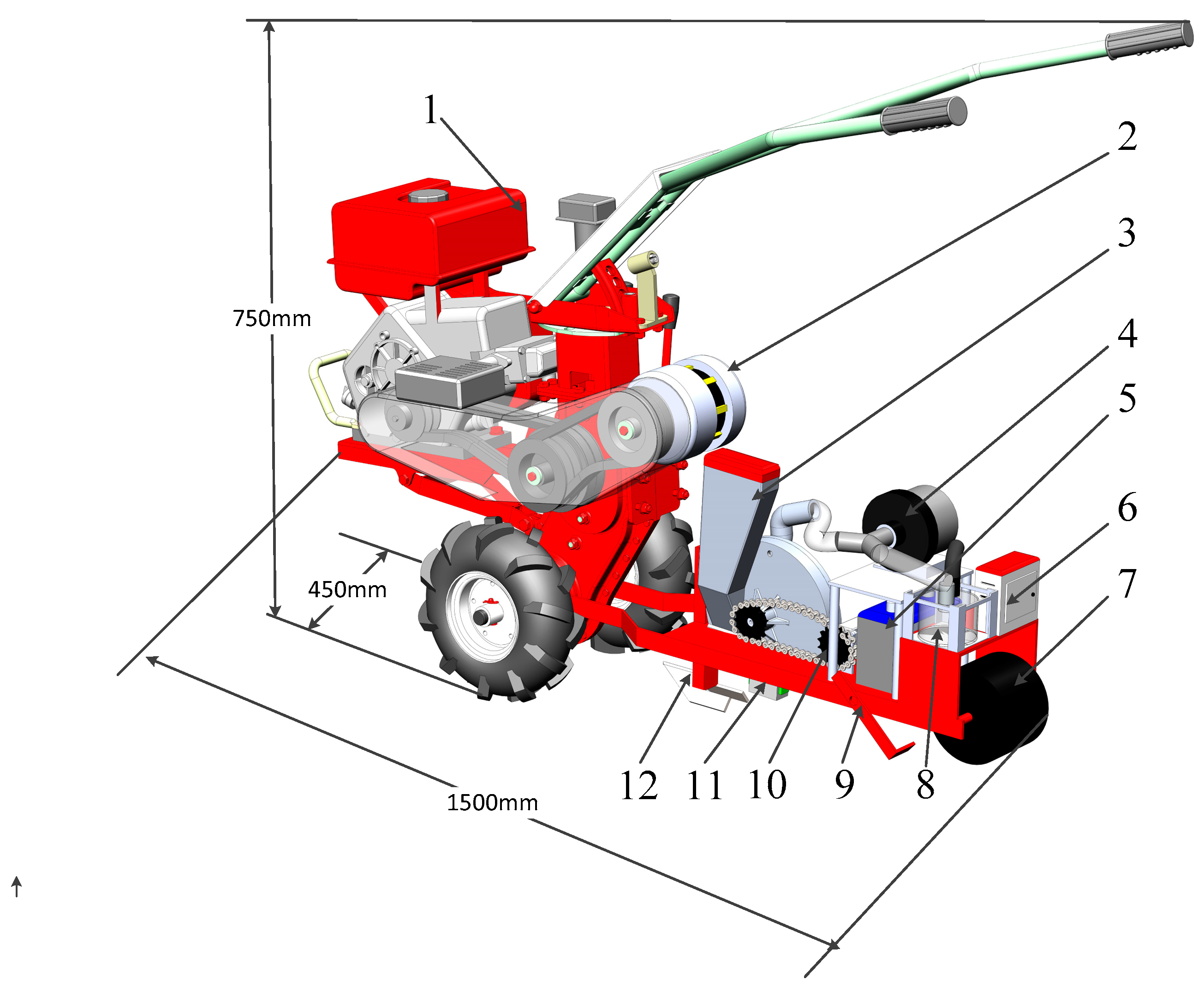
2.1. Working Principle of Plot Seeder
2.2. Design of Key Components of Plot Seeder
2.2.1. Force Analysis of Sorghum Seed
2.2.2. Kinematic Analysis of Seed
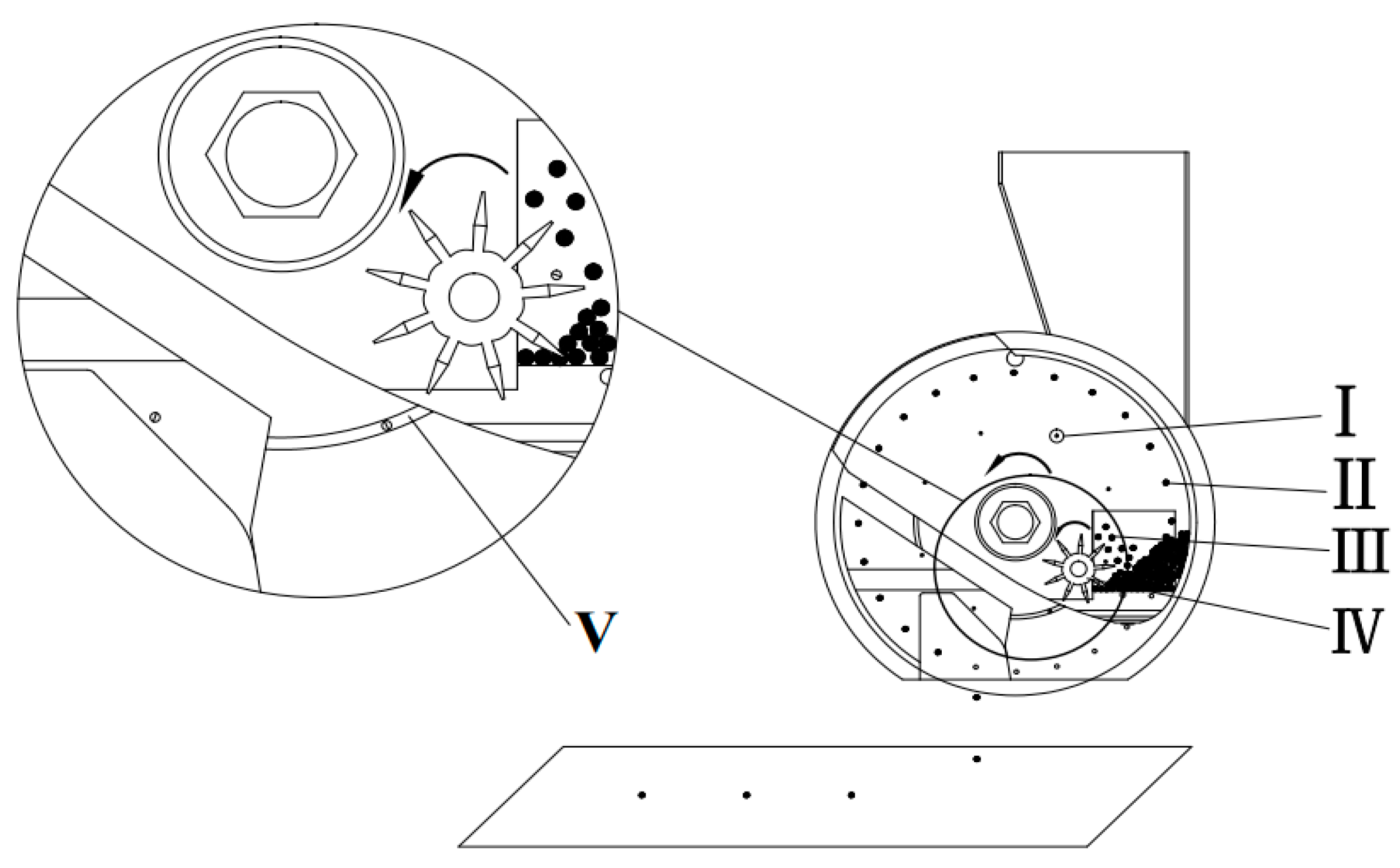
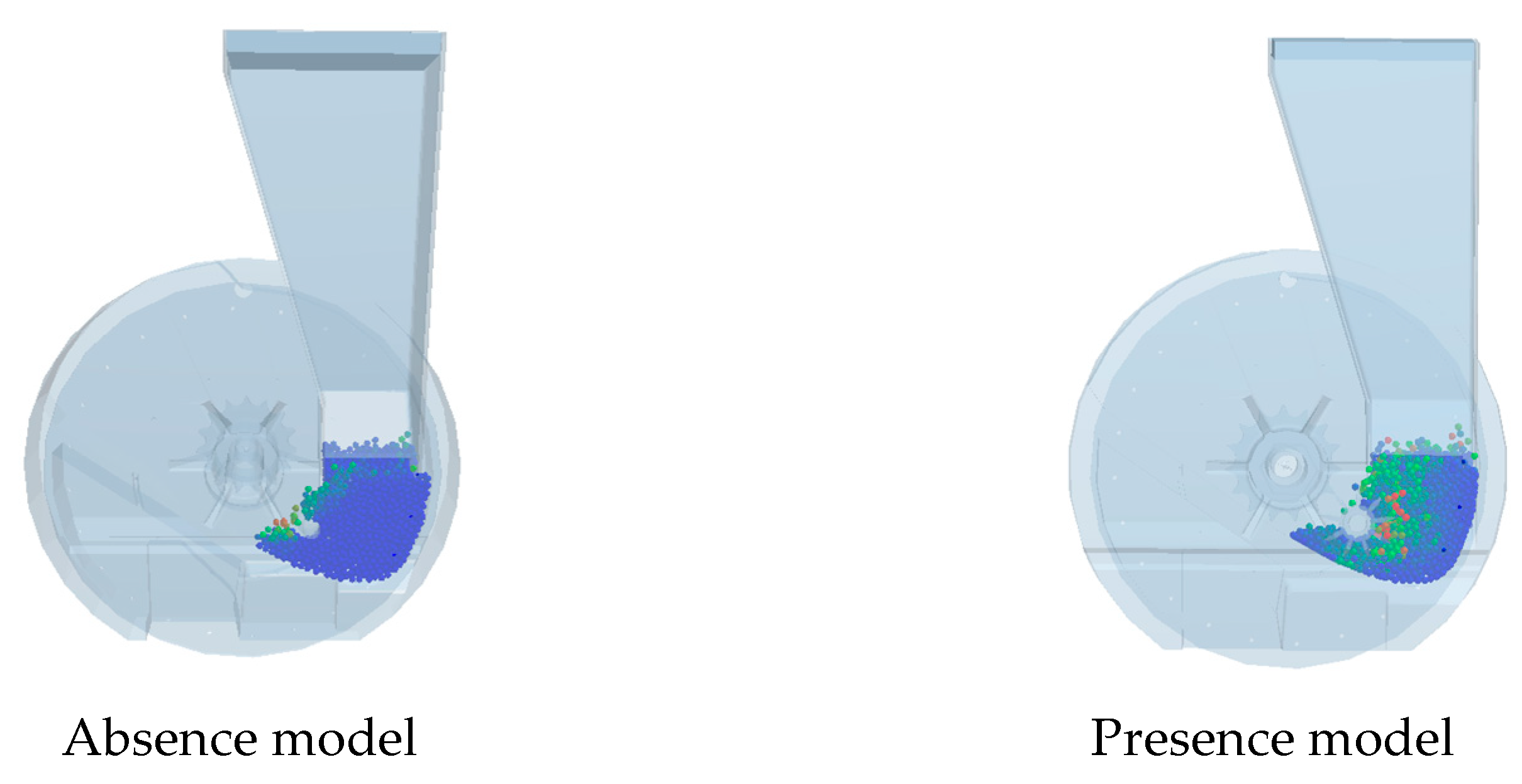
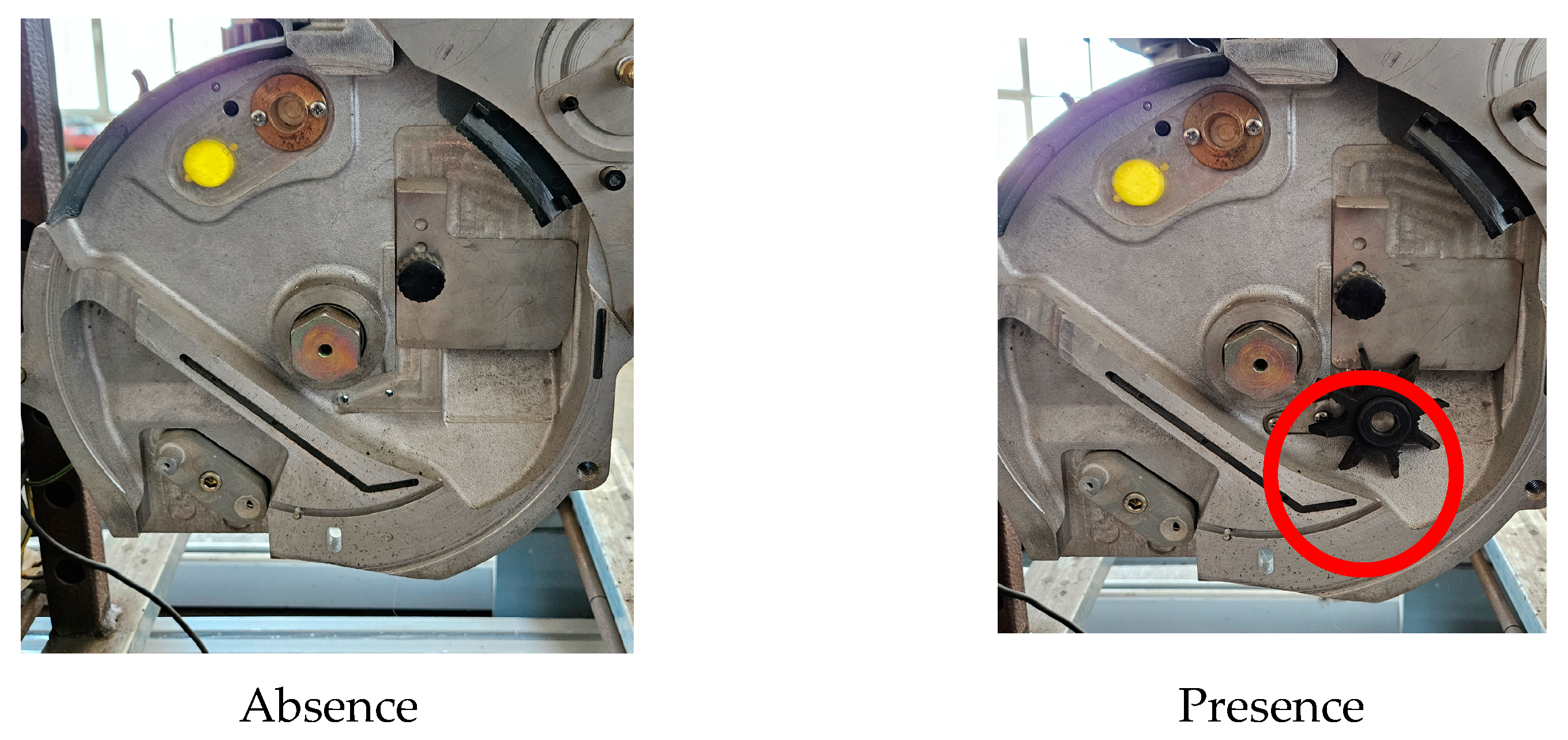
2.2.3. Design of the Seed-Stirring Device
2.2.4. Determination of Vacuum Degree
2.2.5. Selection of Fans
2.2.6. Selection of Motor
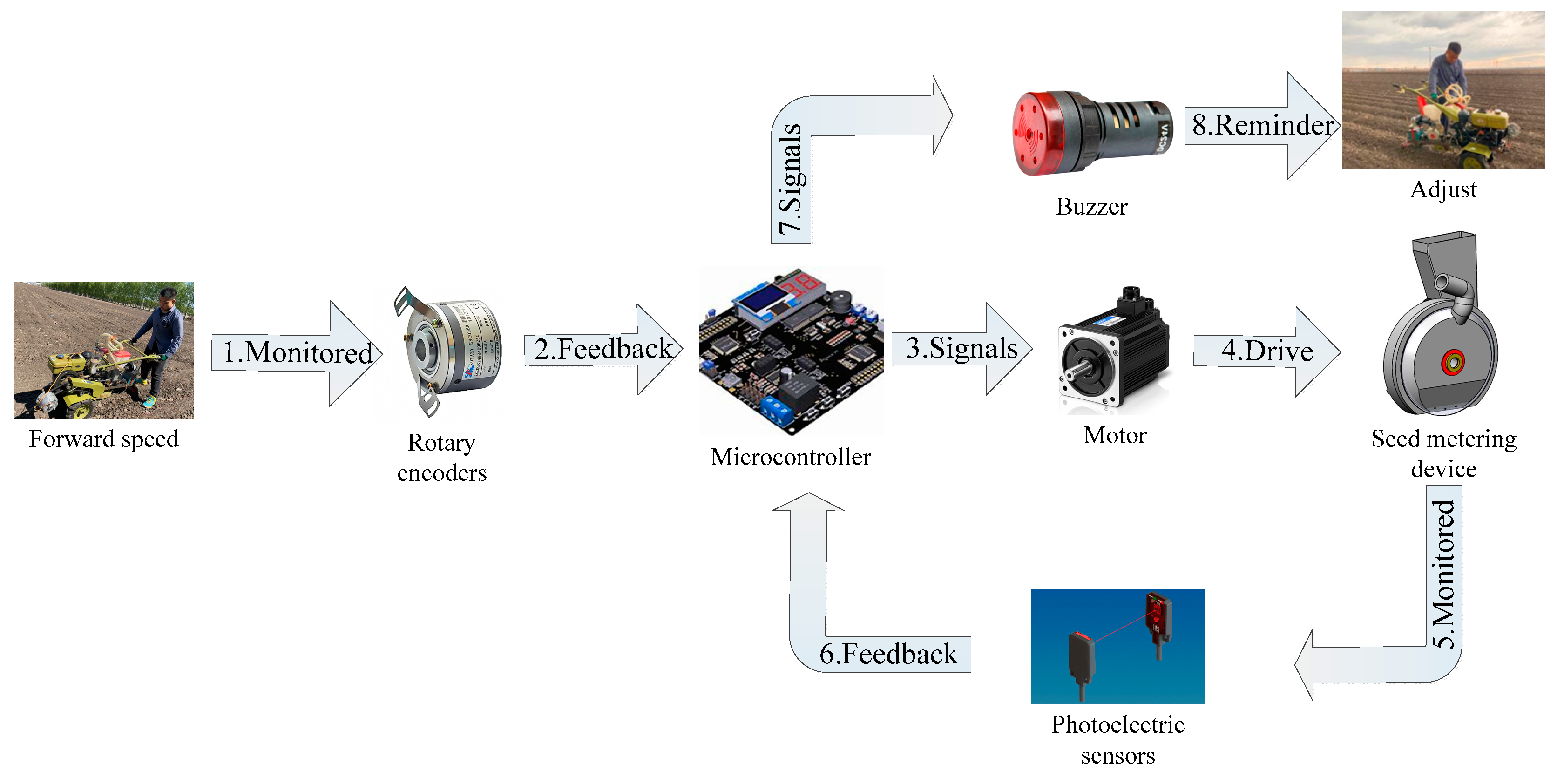
2.2.7. Seeding Control and Monitoring Systems
2.2.8. Design of Engine Power
2.3. Bench Test
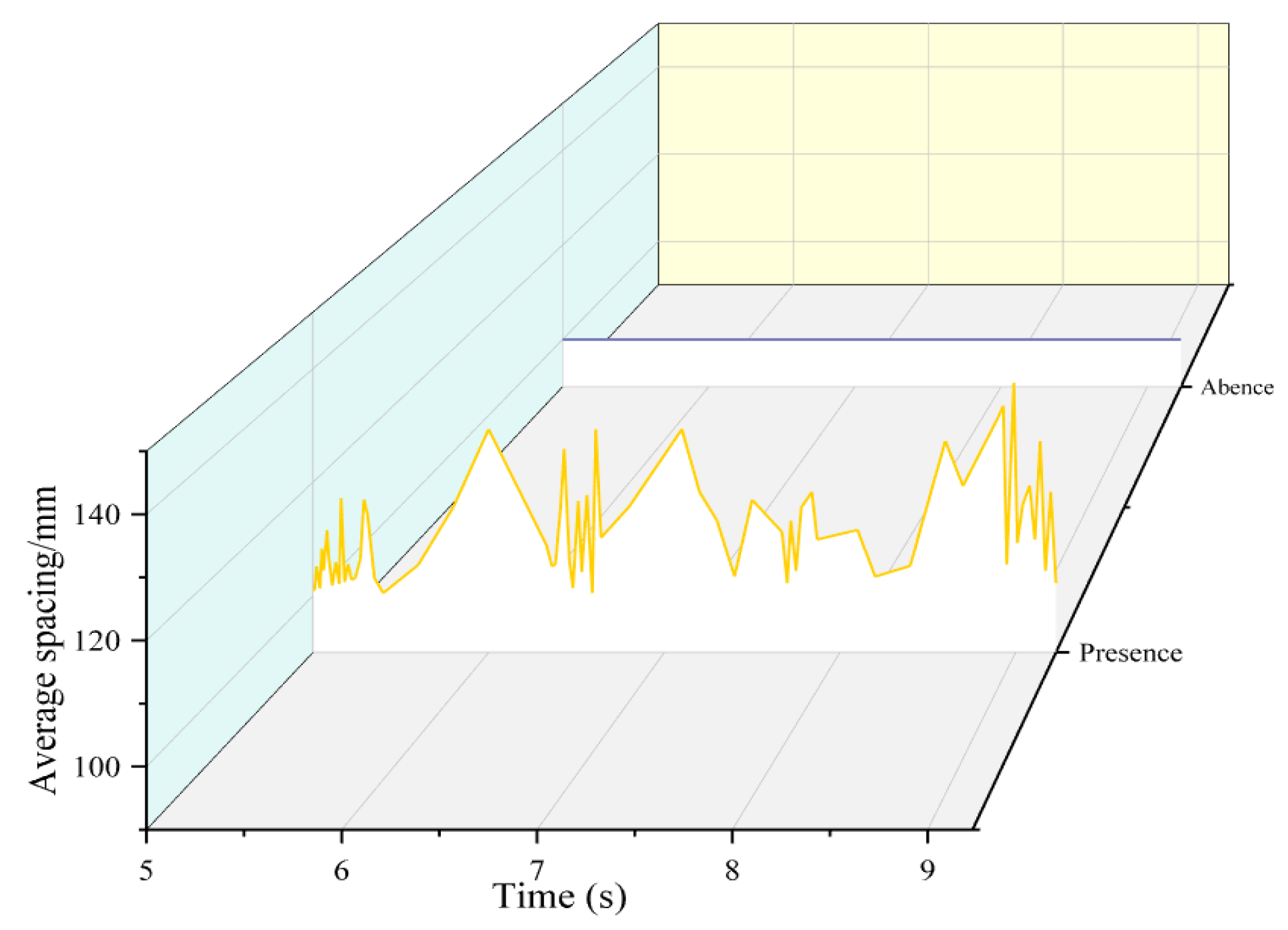
2.4. Seed-Stirring Device Tests
3. Results and Discussion
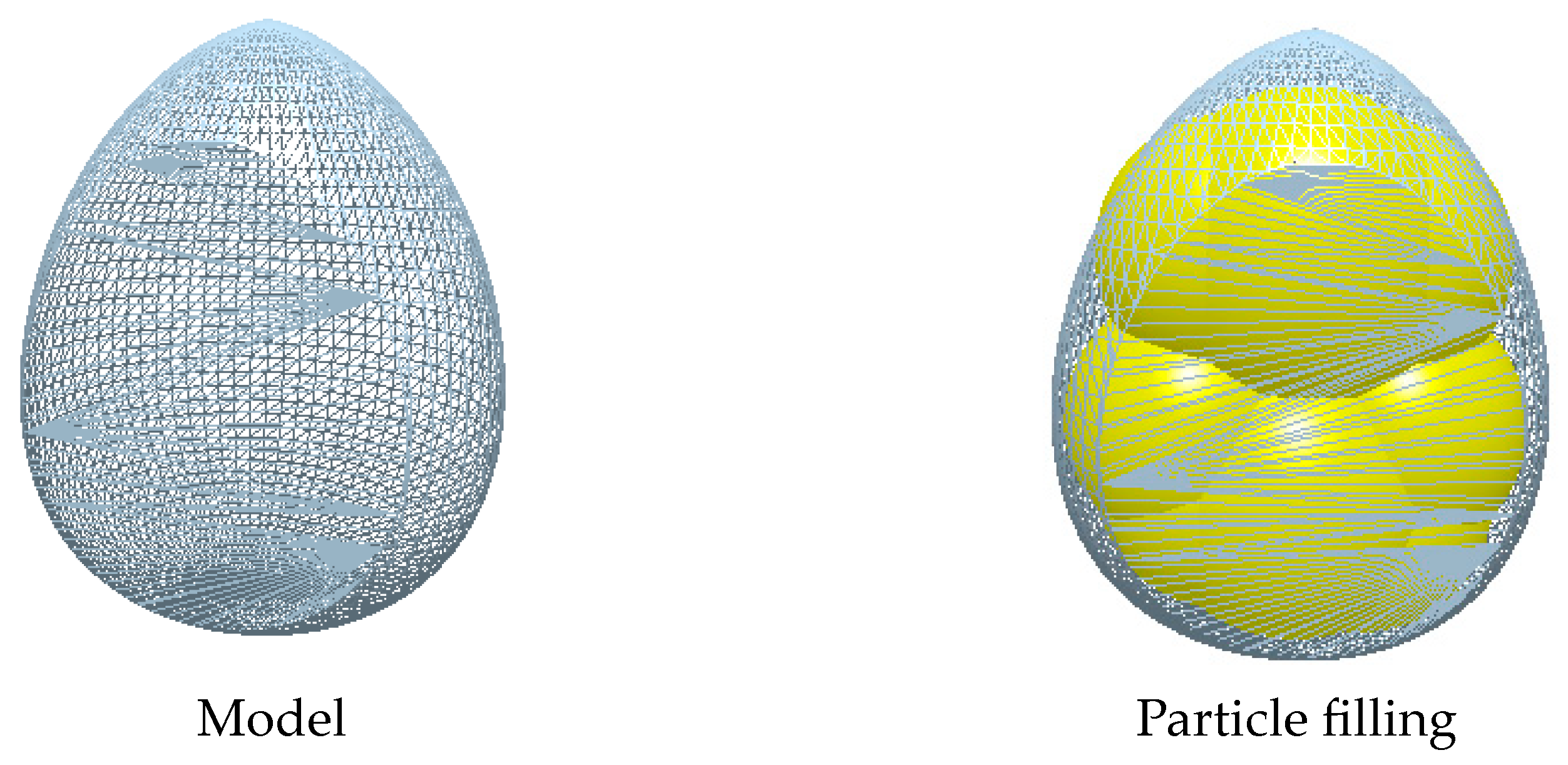
3.1. Simulation and Verification
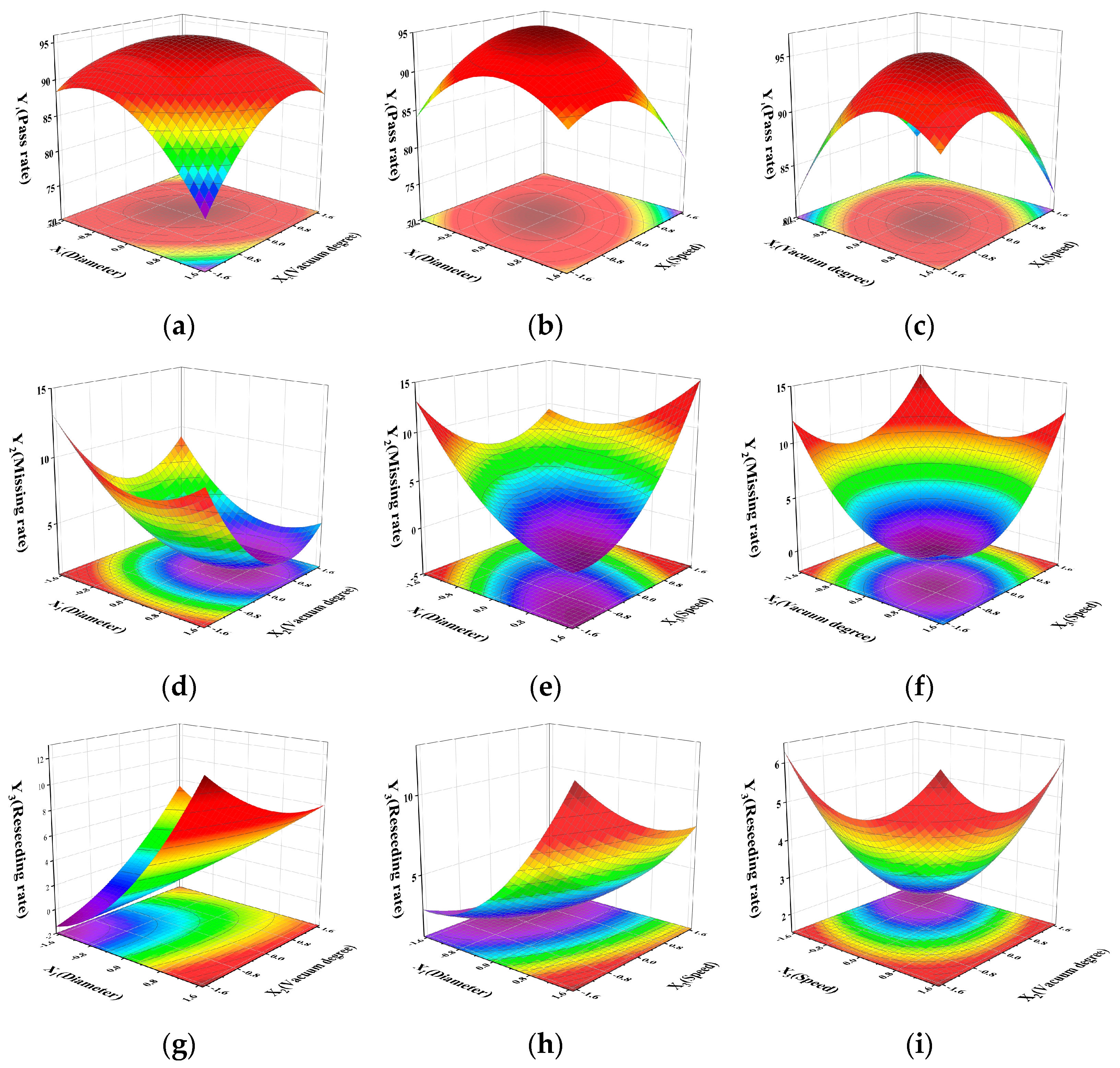
3.2. Analysis of Variance
3.2.1. Pass Rate
3.2.2. Missing Rate
3.2.3. Reseeding Rate
3.3. Optimal Parameter Verification Test
3.3.1. Practical Tests
3.3.2. Field Test
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dornbos, D.L. Production environment and seed quality. In Seed Quality; CRC Press: Boca Raton, FL, USA, 2020; pp. 119–152. [Google Scholar]
- Howard, P.H. Recent changes in the global seed industry and Digital Agriculture Industries. 2022. Available online: https://philhoward.net/2023/01/04/seed-digital/ (accessed on 1 February 2023).
- Golubev, V.; Kudryavtsev, A.; Firsov, A.; Safonov, M. Technique of agrotechnical field experiment. Agric. Mach. Technol. 2017, 4, 43–48. [Google Scholar] [CrossRef]
- Lian, Z.; Wang, J.; Yang, Z.; Shang, S. Development of plot-sowing mechanization in China. Trans. Chin. Soc. Agric. Eng. 2012, 28, 140–145. [Google Scholar]
- Lavrov, A.; Smirnov, I.; Litvinov, M. Justification of the construction of a self-propelled selection seeder with an intelligent seeding system. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; Volume 224, p. 05011. [Google Scholar] [CrossRef]
- Litvinov, M.A.; Moskovskiy, M.N.; Pakhomov, I.V.; Smirnov, I.G. Interface and software for the system of automatic seeding of grain crops. In Proceedings of the 2019 IEEE East-West Design & Test Symposium. EWDTS, Batumi, Georgia, 13–16 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Liu, S.G.; Ma, Y.F. Development History, Status and Trends of Plot Seeder. Appl. Mech. Mater. 2013, 268, 1966–1969. [Google Scholar] [CrossRef]
- Okeyo, S.O.; Ndirangu, S.N.; Isaboke, H.N.; Njeru, L.K. Determinants of sorghum productivity among small-scale farmers in Siaya County, Kenya. Afr. J. Agric. Res. 2020, 16, 722–731. [Google Scholar] [CrossRef]
- Beckman, J.; Ivanic, M.; Jelliffe, J. Market impacts of Farm to Fork: Reducing agricultural input usage. Appl. Econ. Perspect. Policy 2022, 44, 1995–2013. [Google Scholar] [CrossRef]
- Gao, X.; Cui, T.; Zhou, Z.; Yu, Y.; Xu, Y.; Zhang, D.; Song, W. DEM study of particle motion in novel high-speed seed metering device. Adv. Powder Technol. 2021, 32, 1438–1449. [Google Scholar] [CrossRef]
- Liu, R.; Liu, Z.; Zhao, J.; Lu, Q.; Liu, L.; Li, Y. Optimization and Experiment of a Disturbance-Assisted Seed Filling High-Speed Vacuum Seed-Metering Device Based on DEM-CFD. Agriculture 2022, 12, 1304. [Google Scholar] [CrossRef]
- Kovács, P.; Casteel, S.N. Evaluation of a high-speed planter in soybean production. Agron. J. 2023, 115, 1174–1187. [Google Scholar] [CrossRef]
- Timene, A.; Djalo, H. Design of a five-bar duckbill-type mechanism for sorghum transplanting. J. Agric. Eng. 2023, 54, 1473. [Google Scholar] [CrossRef]
- Wang, H.; Sun, X.; Li, H.; Fu, J.; Zeng, X.; Xu, Y.; Wang, Y.; Liu, H.; Lü, Z. Design and parameter optimization of a finger clip plate garlic seed-metering device based on EDEM. Agronomy 2022, 12, 1543. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, D.; Yang, L.; Cui, T.; Song, W.; He, X.; Wu, H.; Dong, J. Optimal design and experiment of critical components of hand-pushing corn plot precision planter. Agriculture 2022, 12, 2103. [Google Scholar] [CrossRef]
- Dharmendra, K.R.; Venkat, R. Performance evaluation of manually operated single row cotton planter. Int. J. Chem. Stud. 2020, 8, 130–134. [Google Scholar] [CrossRef]
- Tang, H.; Xu, C.; Wang, Z.; Wang, Q.; Wang, J. Optimized design, monitoring system development and experiment for a long-belt finger-clip precision corn seed metering device. Front. Plant Sci. 2022, 13, 814747. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Liu, Q.; Ou, Y.; Zou, X. Numerical simulation and verification of seed-filling performance of single-bud billet sugarcane seed-metering device based on EDEM. Agriculture 2022, 12, 983. [Google Scholar] [CrossRef]
- Xu, J.; Hou, J.; Wu, W.; Han, C.; Wang, X.; Tang, T.; Sun, S. Key structure design and experiment of air-suction vegetable seed-metering device. Agronomy 2022, 12, 675. [Google Scholar] [CrossRef]
- Tang, H.; Xu, F.; Xu, C.; Zhao, J.; Wang, Y.-J. The influence of a seed drop tube of the inside-filling air-blowing precision seed-metering device on seeding quality. Comput. Electron. Agric. 2023, 204, 107555. [Google Scholar] [CrossRef]
- Haitao, C.; Hongfei, W.; Yecheng, W.; Naiyu, S.; Zhipeng, W.; Yukuan, D. Design and experiment of three-leaf type air-suction seed meter with automatic clear and replace seeds features for soybean plot test. Trans. Chin. Soc. Agric. Mach. 2020, 51, 75–85. [Google Scholar] [CrossRef]
- Xiong, D.; Wu, M.; Xie, W.; Liu, R.; Luo, H. Design and experimental study of the general mechanical pneumatic combined seed metering device. Appl. Sci. 2021, 11, 7223. [Google Scholar] [CrossRef]
- Karayel, D.; Güngör, O.; Šarauskis, E. Estimation of optimum vacuum pressure of air-suction seed-metering device of precision seeders using artificial neural network models. Agronomy 2022, 12, 1600. [Google Scholar] [CrossRef]
- Xing, H.; Wang, Z.; Luo, X.; He, S.; Zang, Y. Mechanism modeling and experimental analysis of seed throwing with rice pneumatic seed metering device with adjustable seeding rate. Comput. Electron. Agric. 2020, 178, 105697. [Google Scholar] [CrossRef]
- Fangyan, W.; Liang, Y.; Hongti, W. Design and Test of Electric Driving Pneumatic Carrot Planter in Greenhouse. Trans. Chin. Soc. Agric. Mach. 2022, 53, 64–74. [Google Scholar] [CrossRef]
- Qinghui, L.; Qin, L.; Guangxin, J.; Xiaobao, Q.; Wei, S.; Jinwen, Z. Design and Test of Ginseng Precision Seeder with Ditching and Seeding Monomer Type. Trans. Chin. Soc. Agric. Mach. 2022, 53, 72–82. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, H.; Pan, F.; Du, M.; Ji, C. Control system of a motor-driven precision no-tillage maize planter based on the CANopen protocol. Agriculture 2022, 12, 932. [Google Scholar] [CrossRef]
- Yu, Y.; Hu, Y.; Shang, S.; Diao, L.; Ge, R.; Zhang, X. Design of motor-driven precision seed-metering device with improved fuzzy PID controller for small peanut planters. Int. J. Agric. Biol. Eng. 2023, 16, 136–144. [Google Scholar] [CrossRef]
- Hou, Y.; Wu, Z.; Cai, X.; Dong, Z. Research on Fault Diagnosis and Prediction Method about Driving Motor for Seeding Metering of Plot Seeder Based on SVMs Classification and Regression. IOP Conf. Ser. Earth Environ. Sci. 2020, 474, 032012. [Google Scholar] [CrossRef]
- Krutz, G.; Thompson, L.; Claar, P. Design of Agricultural Machinery; John Wiley and Sons: Hoboken, NJ, USA, 1984. [Google Scholar]
- Krutz, G.; Thompson, L.; Claar, P. Solutions Manual to Accompany Design of Agricultural; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Qiu, S.; Yu, Y.; Feng, Y.; Tang, Z.; Cui, Q.; Yuan, X. Crushing Characteristics of Sorghum Grains Subjected to Compression and Impact Loading at Different Moisture Contents. Agriculture 2022, 12, 1422. [Google Scholar] [CrossRef]
- Tabal, R.; Amongo, R.; Quilloy, E.; Peralta, E. Development of a single-row push type plot seeder with mechatronic seed feeding device for corn. Zea mays L. field breeding experiment. IOP Conf. Ser. Earth Environ. Sci. 2022, 977, 012067. [Google Scholar] [CrossRef]
- Aduov, M.; Nukusheva, S.; Tulegenov, T.; Volodya, K.; Uteulov, K.; Karwat, B.; Bembenek, M. Experimental Field Tests of the Suitability of a New Seeder for the Soils of Northern Kazakhstan. Agriculture 2023, 13, 1687. [Google Scholar] [CrossRef]
- Chen, Y.; Cheng, Y.; Chen, J.; Zheng, Z.; Hu, C.; Cao, J. Design and experiment of the buckwheat hill-drop planter hole forming device. Agriculture 2021, 11, 1085. [Google Scholar] [CrossRef]
- Cheng, X.; Li, H.; He, J.; Wang, Q.; Lu, C.; Wang, Y.; Wang, C.; Wang, C.; Lou, S. Optimization of operating parameters of seeding device in plot seeder with seeding control system. Int. J. Agric. Biol. Eng. 2021, 14, 83–91. [Google Scholar] [CrossRef]
- Cortez, J.W.; Anghinoni, M.; Arcoverde, S.N. Seed metering mechanisms and tractor-seeder forward speed on corn agronomic components. Eng. Agrícola 2020, 40, 61–68. [Google Scholar] [CrossRef]
- Dongwei, W.; Jiasheng, W.; Shuqi, S. Design and Experimental Study on Seed Metering Device of Peanut Plot Seeder. Сельскoхoзяйственные 2019, 4, 38–41. [Google Scholar] [CrossRef]
- Li, H.; Zhao, C.; Yan, B.; Ling, L.; Meng, Z. Design and Verification of the Variable Capacity Roller-Wheel Precision Rice Direct Seed-Metering Device. Agronomy 2022, 12, 1798. [Google Scholar] [CrossRef]
- Lopes, A.G.C.; Correia, T.; Taveira, W.; Pereira, G.G.; Souza, A. Soybean performance in grouped and conventional sowing with pneumatic seeder at different operational speeds. Rev. Agric. Neotrop. 2021, 8, e6721. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Parameter |
|---|---|
| Size/mm | 1500 × 450 × 750 |
| Mass/kg | 100 |
| Power/kW | 9.52 |
| Number of rows | 1 |
| Plant spacing/mm | 20~150 |
| Operating speed/km/h | 3.6~5.4 |
| Sowing depth/mm | 0~50 |
| Maximum | Minimum | Average Value | Standard Deviation | |
|---|---|---|---|---|
| Length/mm | 4.87 | 1.17 | 3.67 | 0.04 |
| Width/mm | 5.58 | 1.84 | 2.39 | 0.06 |
| Height/mm | 5.39 | 2.38 | 4.30 | 0.04 |
| Sphericity/% | 97.93 | 72.43 | 78.04 | 1.02 |
| Xi | Diameter X1/(mm) | Vacuum Degree X2/(kPa) | Speed X3/(r/min) |
|---|---|---|---|
| γ | 3.8 | 9.364 ≈ 9.4 | 46.8 |
| +1 | 3.5 | 8.0 | 40 |
| 0 | 2.5 | 6.0 | 30 |
| −1 | 1.5 | 4.0 | 20 |
| −γ | 0.8 | 2.636 ≈ 2.6 | 13.182 ≈ 13.2 |
| Δj | 1.35 | 2.0 | 10.0 |
| Project | Poisson’s Ratio | Shear Modulus (Pa) | Density (kg·m−3) | Elastic Recovery Factor (With Sorghum) | ||
|---|---|---|---|---|---|---|
| Sorghum | 0.36 | 1.25 × 108 | 1200 | 0.323 | 0.433 | 0.0554 |
| Seed tray | 0.27 | 7.40 × 1010 | 7600 | 0.723 | 0.476 | 0.0322 |
| Seed mixing Pin | 0.19 | 0.25 × 105 | 800 | 0.206 | 0.626 | 0.0177 |
| Type | Pass Rate Y1 (%) | Missing Rate Y2 (%) | Reseeding Rate Y3 (%) |
|---|---|---|---|
| Absence | 90.4 | 5.65 | 3.95 |
| Presence | 95.31 | 0.75 | 3.94 |
| No. | Experimental Factors | Test Metrics | ||||
|---|---|---|---|---|---|---|
| Diameter X1/(mm) | Vacuum Degree X2/(kPa) | Speed X3/(r/min) | Pass Rate Y1 (%) | Missing Rate Y2 (%) | Reseeding Rate Y3 (%) | |
| 1 | 1.5 | 4.0 | 20.0 | 90.25 | 8.76 | 0.99 |
| 2 | 3.5 | 4.0 | 20.0 | 86.89 | 4.51 | 8.6 |
| 3 | 1.5 | 8.0 | 20.0 | 90.17 | 4.74 | 5.09 |
| 4 | 3.5 | 8.0 | 20.0 | 93.76 | 1.02 | 5.22 |
| 5 | 1.5 | 40 | 40.0 | 92.9 | 6.15 | 0.95 |
| 6 | 3.5 | 4.0 | 40.0 | 86.21 | 9.59 | 4.20 |
| 7 | 1.5 | 8.0 | 40.0 | 90.71 | 5.57 | 3.72 |
| 8 | 3.5 | 8.0 | 40.0 | 88.03 | 7.13 | 4.84 |
| 9 | 1.2 | 6.0 | 30.0 | 90.55 | 9.10 | 0.35 |
| 10 | 3.8 | 6.0 | 30.0 | 86.95 | 2.03 | 11.02 |
| 11 | 2.5 | 2.6 | 30.0 | 87.37 | 9.57 | 3.06 |
| 12 | 2.5 | 9.4 | 30.0 | 90.33 | 3.91 | 5.76 |
| 13 | 2.5 | 6.0 | 13.2 | 91.54 | 3.21 | 5.25 |
| 14 | 2.5 | 6.0 | 46.8 | 86.42 | 10.52 | 3.06 |
| 15 | 2.5 | 6.0 | 30.0 | 95.87 | 2.49 | 1.64 |
| 16 | 2.5 | 6.0 | 30.0 | 95.36 | 1.59 | 3.05 |
| 17 | 2.5 | 6.0 | 30.0 | 94.24 | 3.63 | 2.13 |
| 18 | 2.5 | 6.0 | 30.0 | 93.2 | 2.91 | 3.89 |
| 19 | 2.5 | 6.0 | 30.0 | 95.04 | 1.43 | 3.53 |
| 20 | 2.5 | 6.0 | 30.0 | 95.5 | 2.53 | 1.97 |
| 21 | 2.5 | 6.0 | 30.0 | 94.25 | 3.03 | 2.72 |
| 22 | 2.5 | 6.0 | 30.0 | 95.34 | 1.07 | 3.59 |
| 23 | 2.5 | 6.0 | 30.0 | 98.2 | 0.93 | 0.87 |
| Source of Variance | Sum of Squares | Df | F-Value | p-Value |
|---|---|---|---|---|
| Model | 250.47 | 9 | 13.46 | <0.0001 |
| X1 | 16.91 | 1 | 8.17 | 0.0134 |
| X2 | 9.51 | 1 | 4.60 | 0.0514 |
| X3 | 10.25 | 1 | 4.96 | 0.0443 |
| X1×2 | 15.02 | 1 | 7.26 | 0.0184 |
| X1 X3 | 11.52 | 1 | 5.57 | 0.0346 |
| X2×3 | 6.41 | 1 | 3.10 | 0.1018 |
| X12 | 63.55 | 1 | 30.73 | <0.0001 |
| X22 | 61.32 | 1 | 29.65 | 0.0001 |
| X32 | 58.49 | 1 | 28.28 | 0.0001 |
| Residuals | 26.88 | 13 | - | - |
| Lack of Fit | 11.45 | 5 | 1.19 | 0.3937 |
| Pure Error | 15.43 | 8 | - | - |
| Cor Total | 277.35 | 22 | - | - |
| Source of Variance | Sum of Squares | Df | F-Value | p-Value |
|---|---|---|---|---|
| Model | 190.55 | 9 | 11.82 | <0.0001 |
| X1 | 16.17 | 1 | 9.03 | 0.0101 |
| X2 | 29.49 | 1 | 16.47 | 0.0014 |
| X3 | 34.49 | 1 | 19.26 | 0.0007 |
| X1×2 | 0.23 | 1 | 0.13 | 0.7271 |
| X1 X3 | 21.03 | 1 | 11.74 | 0.0045 |
| X2×3 | 2.50 | 1 | 1.39 | 0.2588 |
| X12 | 17.50 | 1 | 9.77 | 0.0080 |
| X22 | 34.10 | 1 | 19.04 | 0.0008 |
| X32 | 36.19 | 1 | 20.21 | 0.0006 |
| Residuals | 23.28 | 13 | ||
| Lack of Fit | 16.00 | 5 | 3.52 | 0.0561 |
| Pure Error | 7.28 | 8 | ||
| Cor Total | 213.84 | 22 |
| Source of Variance | Sum of Squares | Df | F-Value | p-Value |
|---|---|---|---|---|
| Model | 113.40 | 9 | 7.20 | 0.0009 |
| X1 | 66.14 | 1 | 37.80 | <0.0001 |
| X2 | 5.51 | 1 | 3.15 | 0.0995 |
| X3 | 7.14 | 1 | 4.08 | 0.0645 |
| X1×2 | 11.54 | 1 | 6.60 | 0.0234 |
| X1 X3 | 1.42 | 1 | 0.81 | 0.3841 |
| X2×3 | 0.90 | 1 | 0.52 | 0.4849 |
| X12 | 14.35 | 1 | 8.20 | 0.0133 |
| X22 | 3.96 | 1 | 2.27 | 0.1562 |
| X32 | 2.66 | 1 | 1.52 | 0.2392 |
| Residuals | 22.75 | 13 | ||
| Lack of Fit | 14.49 | 5 | 2.81 | 0.0939 |
| Pure Error | 8.26 | 8 | ||
| Cor Total | 136.14 | 22 |
| Test Name | Pass Rate Y1 (%) | Missing Rate Y2 (%) | Reseeding Rate Y3 (%) |
|---|---|---|---|
| Optimized results | 95.95 | 0.5 | 3.55 |
| Practical tests | 95.31 | 0.75 | 3.94 |
| Test error | 0.64 | 0.25 | 0.39 |
| No. | Forward Speed (km/h) | Pass Rate Y1 (%) | Missing Rate Y2 (%) | Reseeding Rate Y3 (%) | Missed Monitoring Rate (%) | Monitoring Error (%) | |
|---|---|---|---|---|---|---|---|
| Plot seeder | 1 | 3.8 | 94.91 | 1.53 | 3.56 | 1.64 | 7.19 |
| 2 | 4.2 | 94.82 | 1.74 | 3.44 | 1.82 | 4.60 | |
| 3 | 4.6 | 94.85 | 1.73 | 3.42 | 1.83 | 5.78 | |
| 4 | 5.0 | 94.16 | 2.85 | 2.99 | 2.99 | 4.91 | |
| 5 | 5.4 | 93.27 | 3.67 | 3.06 | 3.88 | 5.72 | |
| Ave. | 4.58 | 94.41 | 2.30 | 3.29 | 2.54 | 5.64 | |
| Duckbill Seeder | 1 | 3.8 | 89.72 | 2.63 | 7.65 | - | - |
| 2 | 4.2 | 88.82 | 2.74 | 8.44 | - | - | |
| 3 | 4.6 | 88.75 | 2.73 | 8.52 | - | - | |
| 4 | 5.0 | 84.16 | 4.85 | 10.99 | - | - | |
| 5 | 5.4 | 83.27 | 5.97 | 10.76 | - | - | |
| Ave. | 4.58 | 86.94 | 3.78 | 9.27 | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, X.; Huang, C.; Tao, G.; Yi, S.; Li, Y. Design and Experiment of Oil-Electric Hybrid Air-Suction Sorghum Plot Seeder. Agriculture 2024, 14, 432. https://doi.org/10.3390/agriculture14030432
Yuan X, Huang C, Tao G, Yi S, Li Y. Design and Experiment of Oil-Electric Hybrid Air-Suction Sorghum Plot Seeder. Agriculture. 2024; 14(3):432. https://doi.org/10.3390/agriculture14030432
Chicago/Turabian StyleYuan, Xinyu, Caojun Huang, Guixiang Tao, Shujuan Yi, and Yifei Li. 2024. "Design and Experiment of Oil-Electric Hybrid Air-Suction Sorghum Plot Seeder" Agriculture 14, no. 3: 432. https://doi.org/10.3390/agriculture14030432
APA StyleYuan, X., Huang, C., Tao, G., Yi, S., & Li, Y. (2024). Design and Experiment of Oil-Electric Hybrid Air-Suction Sorghum Plot Seeder. Agriculture, 14(3), 432. https://doi.org/10.3390/agriculture14030432