
Inversion Model of Salt Content in Alfalfa-Covered Soil Based on a Combination of UAV Spectral and Texture Information

Abstract
1. Introduction
2. Materials and Methods
2.1. Overview of the Study Area
2.2. Data Collection and Processing
2.2.1. UAV Multispectral Image
2.2.2. Field Soil Salinity Data
2.3. Construct Spectral Index
2.4. Multispectral Image Texture Analysis
2.4.1. Texture Feature Extraction
2.4.2. Construct Texture Index
2.5. Model Construction and Accuracy Evaluation
3. Results
3.1. Soil Salt Content Statistics
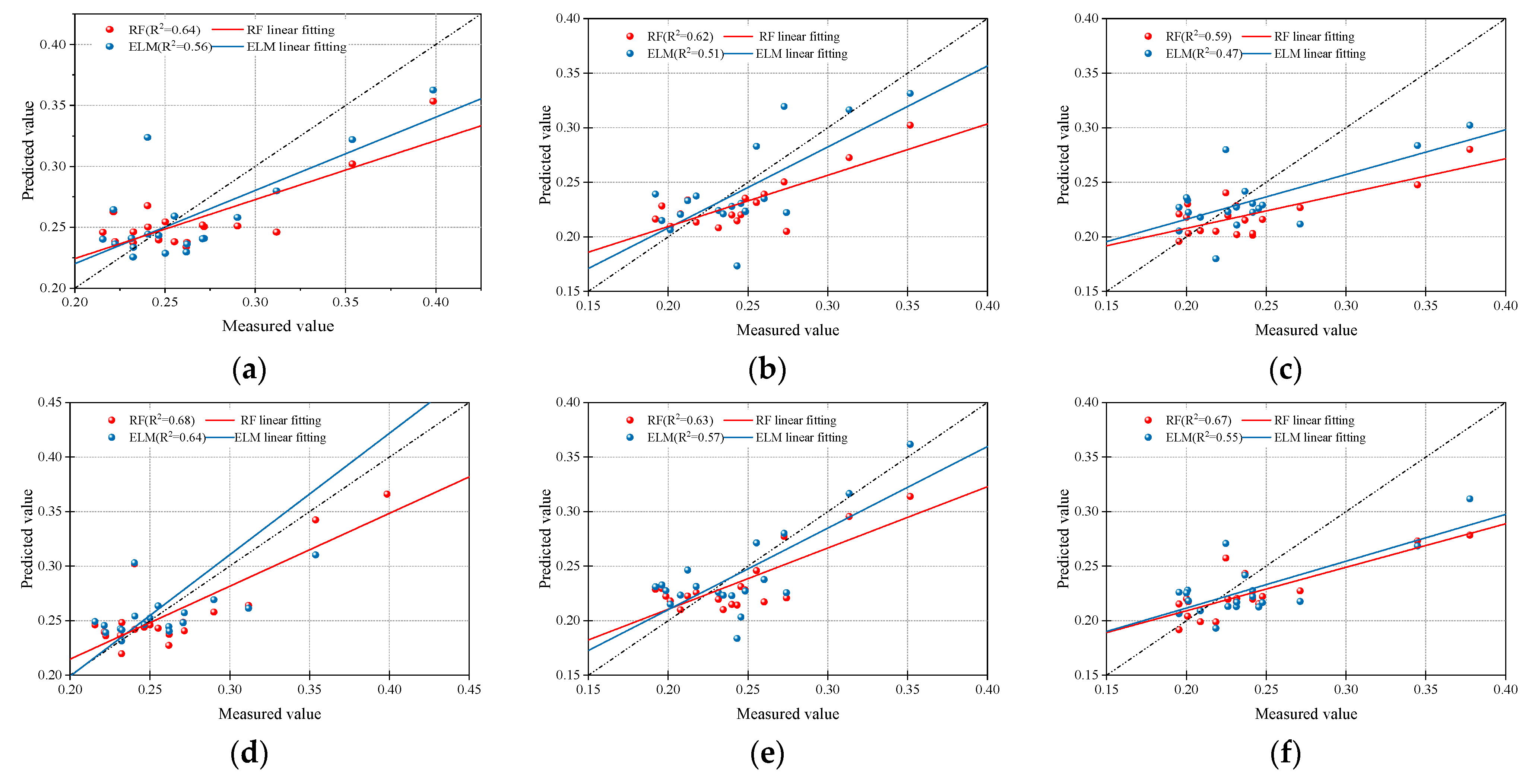
3.2. Based on the Spectral Index Inversion Model
3.2.1. Salinity Index (SIs) Construction Model
3.2.2. Vegetation Index (VIs) Construction Model
3.2.3. Salinity Index + Vegetation Index (SIs + VIs) Construction Model
3.3. Inversion Model Based on the Spectral Index and Texture Information
3.3.1. Vegetation Index + Texture Feature (VIs + TFs) Construction Model
3.3.2. Vegetation Index + Texture Index (VIs + TIs) Construction Model
3.4. Comprehensive Analysis
4. Discussion
5. Conclusions
- (1)
- The VIs construction model showed better inversion accuracy than the SIs and SIs + VIs models in the spectral index modeling.
- (2)
- The combination of texture information with VIs improved the inversion accuracy. The VIs + TIs model showed the best inversion effect, and the second-best model was the VIs + TFs. Compared to the VIs modeling, the RF model R2 of VIs + TIs and VIs + TFs increased by 8.5% and 2.0%, and the ELM model R2 increased by 15.8% and 11.1%, respectively.
- (3)
- The inversion effect of 0–15 cm soil salinity was significantly better than that of other depths, and was the best inversion depth of soil salinity under alfalfa cover. The average R2 for the five types of models constructed by RF was 0.69, while the average R2 for the ELM model was 0.63.
- (4)
- The RF model performed better than the ELM in soil salinity inversion. The RF average R2 was 10% higher than the ELM. The R2 of the RF model ranged from 0.59–0.75, while the R2 for the ELM construction model was 0.47–0.69.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Aldabaa, A.; Weindorf, D.C.; Chakraborty, S.; Sharma, A.; Li, B. Combination of proximal and remote sensing methods for rapid soil salinity quantification. Geoderma 2015, 239, 34–46. [Google Scholar] [CrossRef]
- Hassani, A.; Azapagic, A.; Shokri, N. Global predictions of primary soil salinization under changing climate in the 21st century. Nat. Commun. 2021, 12, 6663. [Google Scholar] [CrossRef]
- Allbed, A.; Kumar, L.; Aldakheel, Y.Y. Assessing soil salinity using soil salinity and vegetation indices derived from IKONOS high-spatial resolution imageries: Applications in a date palm dominated region. Geoderma 2014, 230, 1–8. [Google Scholar] [CrossRef]
- Ding, J.; Yu, D. Monitoring and evaluating spatial variability of soil salinity in dry and wet seasons in the Werigan–Kuqa Oasis, China, using remote sensing and electromagnetic induction instruments. Geoderma 2014, 235, 316–322. [Google Scholar] [CrossRef]
- Chen, J.; Yao, Z.; Zhang, Z.; Wei, G.; Wang, X.; Han, J. UAV Remote Sensing Inversion of Soil Salinity in Field of Sunflower. Trans. Chin. Soc. Agric. Mach. 2020, 51, 178–191. [Google Scholar] [CrossRef]
- Weng, Y.-L.; Gong, P.; Zhu, Z.-L. A Spectral Index for Estimating Soil Salinity in the Yellow River Delta Region of China Using EO-1 Hyperion Data. Pedosphere 2010, 20, 378–388. [Google Scholar] [CrossRef]
- Hu, J.; Peng, J.; Zhou, Y.; Xu, D.; Zhao, R.; Jiang, Q.; Fu, T.; Wang, F.; Shi, Z. Quantitative Estimation of Soil Salinity Using UAV-Borne Hyperspectral and Satellite Multispectral Images. Remote Sens. 2019, 11, 736. [Google Scholar] [CrossRef]
- Zhang, T.-T.; Qi, J.-G.; Gao, Y.; Ouyang, Z.-T.; Zeng, S.-L.; Zhao, B. Detecting soil salinity with MODIS time series VI data. Ecol. Indic. 2015, 52, 480–489. [Google Scholar] [CrossRef]
- Wang, F.; Shi, Z.; Biswas, A.; Yang, S.; Ding, J. Multi-algorithm comparison for predicting soil salinity. Geoderma 2020, 365, 114211. [Google Scholar] [CrossRef]
- Abuzaid, A.S.; El-Komy, M.S.; Shokr, M.S.; El Baroudy, A.A.; Mohamed, E.S.; Rebouh, N.Y.; Abdel-Hai, M.S. Predicting Dynamics of Soil Salinity and Sodicity Using Remote Sensing Techniques: A Landscape-Scale Assessment in the Northeastern Egypt. Sustainability 2023, 15, 9440. [Google Scholar] [CrossRef]
- Niu, B.; Li, X.; Li, F.; Wang, Y.; Hu, X. Vegetation dynamics and its linkage with climatic and anthropogenic factors in the Dawen River Watershed of China from 1999 through. Environ. Sci. Pollut. Res. 2021, 28, 52887–52900. [Google Scholar] [CrossRef]
- Zhang, Z.; Niu, B.; Li, X.; Kang, X.; Wan, H.; Shi, X.; Li, Q.; Xue, Y.; Hu, X. Inversion of soil salinity in China’s Yellow River Delta using unmanned aerial vehicle multispectral technique. Environ. Monit. Assess. 2023, 195, 245. [Google Scholar] [CrossRef]
- Romero-Trigueros, C.; Nortes, P.A.; Alarcón, J.J.; Hunink, J.E.; Parra, M.; Contreras, S.; Droogers, P.; Nicolás, E. Effects of saline reclaimed waters and deficit irrigation on Citrus physiology assessed by UAV remote sensing. Agric. Water Manag. 2017, 183, 60–69. [Google Scholar] [CrossRef]
- Yu, J.; Wang, J.; Leblon, B. Evaluation of Soil Properties, Topographic Metrics, Plant Height, and Unmanned Aerial Vehicle Multispectral Imagery Using Machine Learning Methods to Estimate Canopy Nitrogen Weight in Corn. Remote Sens. 2021, 13, 3105. [Google Scholar] [CrossRef]
- Ge, X.; Ding, J.; Jin, X.; Wang, J.; Chen, X.; Li, X.; Liu, J.; Xie, B. Estimating Agricultural Soil Moisture Content through UAV-Based Hyperspectral Images in the Arid Region. Remote Sens. 2021, 13, 1562. [Google Scholar] [CrossRef]
- Zhu, C.; Ding, J.; Zhang, Z.; Wang, Z. Exploring the potential of UAV hyperspectral image for estimating soil salinity: Effects of optimal band combination algorithm and random forest. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2022, 279, 121416. [Google Scholar] [CrossRef]
- Zhao, W.; Zhou, C.; Zhou, C.; Ma, H.; Wang, Z. Soil Salinity Inversion Model of Oasis in Arid Area Based on UAV Multispectral Remote Sensing. Remote Sens. 2022, 14, 1804. [Google Scholar] [CrossRef]
- Zhang, Z.; Tai, X.; Yang, N.; Zhang, J.; Huang, X.; Chen, Q. Inversion of soil salt content by UAV remote sensing under different vegetation coverage. Trans. Chin. Soc. Agric. Mach. 2022, 53, 220–230. [Google Scholar]
- Zheng, H.; Ma, J.; Zhou, M.; Li, D.; Yao, X.; Cao, W.; Zhu, Y.; Cheng, T. Enhancing the Nitrogen Signals of Rice Canopies across Critical Growth Stages through the Integration of Textural and Spectral Information from Unmanned Aerial Vehicle (UAV) Multispectral Imagery. Remote Sens. 2020, 12, 957. [Google Scholar] [CrossRef]
- Zhang, J.; Cheng, T.; Shi, L.; Wang, W.; Niu, Z.; Guo, W.; Ma, X. Combining spectral and texture features of UAV hyperspectral images for leaf nitrogen content monitoring in winter wheat. Int. J. Remote Sens. 2022, 43, 2335–2356. [Google Scholar] [CrossRef]
- Cheng, M.; Jiao, X.; Liu, Y.; Shao, M.; Yu, X.; Bai, Y.; Wang, Z.; Wang, S.; Tuohuti, N.; Liu, S.; et al. Estimation of soil moisture content under high maize canopy coverage from UAV multimodal data and machine learning. Agric. Water Manag. 2022, 264, 107530. [Google Scholar] [CrossRef]
- Sun, Q.; Sun, L.; Shu, M.; Gu, X.; Yang, G.; Zhou, L. Monitoring Maize Lodging Grades via Unmanned Aerial Vehicle Multispectral Image. Plant Phenomics 2019, 2019, 5704154. [Google Scholar] [CrossRef]
- Zheng, H.B.; Cheng, T.; Zhou, M.; Li, D.; Yao, X.; Tian, Y.C.; Cao, W.X.; Zhu, Y. Improved estimation of rice aboveground biomass combining textural and spectral analysis of UAV imagery. Precis. Agric. 2019, 20, 611–629. [Google Scholar] [CrossRef]
- Wei, G.; Li, Y.; Zhang, Z.; Chen, Y.; Chen, J.; Yao, Z.; Lao, C.; Chen, H. Estimation of soil salt content by combining UAV-borne multispectral sensor and machine learning algorithms. PeerJ 2020, 8, e9087. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, F.; Zhang, X.; Chan, N.W.; Kung, H.-T.; Ariken, M.; Zhou, X.; Wang, Y. Regional suitability prediction of soil salinization based on remote-sensing derivatives and optimal spectral index. Sci. Total Environ. 2021, 775, 145807. [Google Scholar] [CrossRef]
- Yang, N.; Cui, W.; Zhang, Z.; Zhang, J.; Chen, J.; Du, R.; Lao, C.; Zhou, Y. Inversion of soil salinity at different depths by UAV multispectral remote sensing. Trans. Chin. Soc. Agric. Eng. 2020, 36, 13–21. [Google Scholar] [CrossRef]
- Zhang, F.; Tashpolat, T.; Ding, J.; Tian, Y.; Mamat, S. Relationships between soil salinization and spectra in the delta oasis of Weigan and Kuqa Rivers. Res. Environ. Sci. 2009, 22, 227–235. [Google Scholar]
- Huang, Q.; Xu, X.; Lü, L.; Ren, D.; Ke, J.; Xiong, Y.; Huo, Z.; Huang, G. Soil salinity distribution based on remote sensing and its effect on crop growth in Hetao Irrigation District. Trans. Chin. Soc. Agric. Eng. 2018, 34, 102–109. [Google Scholar] [CrossRef]
- Zhang, Z.; Tan, C.; Xu, C.; Chen, S.; Han, W.; Li, Y. Retrieving Soil Moisture Content in Field Maize Root Zone Based on UAV Multispectral Remote Sensing. Trans. Chin. Soc. Agric. Mach. 2019, 50, 246–257. [Google Scholar] [CrossRef]
- Chang, A.; Yeom, J.; Jung, J.; Landivar, J. Comparison of Canopy Shape and Vegetation Indices of Citrus Trees Derived from UAV Multispectral Images for Characterization of Citrus Greening Disease. Remote Sens. 2020, 12, 4122. [Google Scholar] [CrossRef]
- Kaplan, G.; Avdan, U. Evaluating the utilization of the red edge and radar bands from sentinel sensors for wetland classification. Catena 2019, 178, 109–119. [Google Scholar] [CrossRef]
- Wang, J.; Ding, J.; Yu, D.; Ma, X.; Zhang, Z.; Ge, X.; Teng, D.; Li, X.; Liang, J.; Lizaga, I.; et al. Capability of Sentinel-2 MSI data for monitoring and mapping of soil salinity in dry and wet seasons in the Ebinur Lake region, Xinjiang, China. Geoderma 2019, 353, 172–187. [Google Scholar] [CrossRef]
- Zheng, Q.; Huang, W.; Cui, X.; Shi, Y.; Liu, L. New Spectral Index for Detecting Wheat Yellow Rust Using Sentinel-2 Multispectral Imagery. Sensors 2018, 18, 868. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Zhang, X.; Chen, S.; Wang, H.; Jayavelu, S.; Cammarano, D.; Fu, Y. Integrated UAV-Based Multi-Source Data for Predicting Maize Grain Yield Using Machine Learning Approaches. Remote Sens. 2022, 14, 6290. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, S.; Wu, Z.; Wang, S.; Bryant, C.R.; Senthilnath, J.; Cunha, M.; Fu, Y.H. Integrating Spectral and Textural Information for Monitoring the Growth of Pear Trees Using Optical Images from the UAV Platform. Remote Sens. 2021, 13, 1795. [Google Scholar] [CrossRef]
- Wang, L.; He, J.; Zheng, G.; Guo, Y.; Zhang, Y.; Zhang, H. Estimation of Maize FPAR Based on UAV Multispectral Remote Sensing. Trans. Chin. Soc. Agric. Mach. 2022, 53, 202–210. [Google Scholar] [CrossRef]
- Xiao, Y.; Dong, Y.; Huang, W.; Liu, L.; Ma, H. Wheat Fusarium Head Blight Detection Using UAV-Based Spectral and Texture Features in Optimal Window Size. Remote Sens. 2021, 13, 2437. [Google Scholar] [CrossRef]
- Zhao, W.; Ma, F.; Ma, H.; Zhou, C. Soil salinity inversion model based on multispectral image of UAV. Trans. Chin. Soc. Agric. Eng. 2022, 38, 93–101. [Google Scholar] [CrossRef]
- Shah, S.H.H.; Wang, J.; Hao, X.; Thomas, B.W. Modelling soil salinity effects on salt water uptake and crop growth using a modified denitrification-decomposition model: A phytoremediation approach. J. Environ. Manag. 2022, 301, 113820. [Google Scholar] [CrossRef]
- Lu, Q.; Ge, G.; Sa, D.; Wang, Z.; Hou, M.; Jia, Y.S. Effects of salt stress levels on nutritional quality and microorganisms of alfalfa-influenced soil. PeerJ 2021, 9, e11729. [Google Scholar] [CrossRef]
- Qiu, Y.; Wang, Y.; Fan, Y.; Hao, X.; Li, S.; Kang, S. Root, Yield, and Quality of Alfalfa Affected by Soil Salinity in Northwest China. Agriculture 2023, 13, 750. [Google Scholar] [CrossRef]
- Zhang, Z.; Wei, G.; Yao, Z.; Tan, C.; Wang, X.; Han, J. Soil salt inversion model based on UAV multispectral remote sensing. Trans. Chin. Soc. Agric. Mach. 2019, 50, 151–160. [Google Scholar] [CrossRef]
- Hang, Y.; Su, H.; Yu, Z.; Liu, H.; Guan, H.; Kong, F. Estimation of rice leaf area index combining UAV spectrum, texture features and vegetation coverage. Trans. Chin. Soc. Agric. Eng. 2021, 37, 64–71. [Google Scholar] [CrossRef]
- Guo, Y.; Fu, Y.H.; Chen, S.; Bryant, C.R.; Li, X.; Senthilnath, J.; Sun, H.; Wang, S.; Wu, Z.; de Beurs, K. Integrating spectral and textural information for identifying the tasseling date of summer maize using UAV based RGB images. Int. J. Appl. Earth Obs. Geoinformation 2021, 102, 102435. [Google Scholar] [CrossRef]
- Ge, X.; Wang, J.; Ding, J.; Cao, X.; Zhang, Z.; Liu, J.; Li, X. Combining UAV-based hyperspectral imagery and machine learning algorithms for soil moisture content monitoring. PeerJ 2019, 7, e6926. [Google Scholar] [CrossRef]
- Lindner, C.; Bromiley, P.A.; Ionita, M.C.; Cootes, T.F. Robust and Accurate Shape Model Matching Using Random Forest Regression-Voting. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 1862–1874. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Parameter | ||
| Blue | 450 nm (±16) | Sensor pixels | 2.08 million |
| Green | 560 nm (±16) | ISO | 200–800 |
| Red | 650 nm (±16) | Route overlap rate | 70% |
| NIR | 840 nm (±26) | Side image overlap rate | 65% |
| Red edge | 730 nm (±16) | Average speed | 4 m/s |
| Ranking | 0–15 cm | 15–30 cm | 30–50 cm | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SIs | VIs | SIs | VIs | SIs | VIs | |||||||
| 1 | SI-T-reg | 0.9280 | NLI | 0.9159 | SI-T-reg | 0.9255 | NLI-reg | 0.9121 | SI-T-reg | 0.9222 | NLI-reg | 0.9155 |
| 2 | SI | 0.9215 | GLI-reg | 0.9076 | S4-reg | 0.9205 | GLI-reg | 0.9078 | Int2 | 0.9188 | GLI-reg | 0.9120 |
| 3 | SI1-reg | 0.9204 | IPVI | 0.8956 | SI1-reg | 0.9193 | RVI-reg | 0.8918 | Int1-reg | 0.9164 | RVI-reg | 0.8965 |
| 4 | S4-reg | 0.9188 | NNIR-reg | 0.8948 | Int2 | 0.9183 | NNIR-reg | 0.8910 | SI-reg | 0.9145 | NNIR-reg | 0.8952 |
| 5 | Int1-reg | 0.9145 | RVI-reg | 0.8930 | Int1-reg | 0.9177 | IPVI | 0.8894 | S4-reg | 0.9143 | IPVI | 0.8944 |
| Salinity Index (SIs) | Vegetation Index (VIs) | ||||
|---|---|---|---|---|---|
| Salinity index | SI | SI = (b1 + b3)0.5 | Ratio vegetation index | RVI | RVI = b4/b3 |
| Salinity index1 | SI1 | SI1 = (b2 × b3)0.5 | Non-linear index | NLI | NLI = (b42 − b3)/(b42 + b3) |
| Salinity index-T | SI-T | SI-T = 100(b3/b4) | Infrared percentage vegetation index | IPVI | IPVI = b4/(b4 + b2) |
| Salinity index S4 | S4 | S4 = (b1 × b3)0.5 | Green leaf index | GLI | GLI = [(b2 − b3) + (b2 − b1)]/2b2 + b3 + b1 |
| Intensity index1 | Int1 | Int1 = (b2 + b3)/2 | Normalized near-infrared index | NNIR | NNIR = b4/(b4 + b3 + b2) |
| Intensity index2 | Int2 | Int2 = (b2 + b3 + b4)/2 | |||
| Soil Depth /cm | Dataset | Sample Size | Heavy-Saline–Alkali Soil | Moderately Saline–Alkali Soil | Light-Saline–Alkali Soil | Max/% | Min/% | Mean/% | Coefficient of Variation |
|---|---|---|---|---|---|---|---|---|---|
| 0–15 | Modeling set | 43 | 1 | 33 | 9 | 0.560 | 0.155 | 0.275 | 0.317 |
| Prediction set | 19 | 0 | 19 | 0 | 0.399 | 0.142 | 0.249 | 0.258 | |
| Total sample | 62 | 1 | 52 | 9 | 0.560 | 0.142 | 0.267 | 0.304 | |
| 15–30 | Modeling set | 43 | 0 | 36 | 7 | 0.429 | 0.144 | 0.246 | 0.259 |
| Prediction set | 19 | 0 | 16 | 3 | 0.352 | 0.162 | 0.243 | 0.187 | |
| Total sample | 62 | 0 | 52 | 10 | 0.429 | 0.144 | 0.245 | 0.238 | |
| 30–50 | Modeling set | 43 | 0 | 28 | 15 | 0.385 | 0.152 | 0.232 | 0.268 |
| Prediction set | 19 | 0 | 17 | 2 | 0.378 | 0.195 | 0.239 | 0.201 | |
| Total sample | 62 | 0 | 45 | 17 | 0.385 | 0.152 | 0.234 | 0.247 |
| Soil Depth /cm | Input | Model | Modeling Set | Prediction Set | ||||
|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | |||
| 0–15 | SI, Int1-reg, SI1-reg, SI-T-reg, S4-reg | RF | 0.68 | 0.049 | 0.036 | 0.64 | 0.030 | 0.025 |
| ELM | 0.57 | 0.052 | 0.045 | 0.56 | 0.031 | 0.025 | ||
| 15–30 | Int2, Int1-reg, SI1-reg, SI-T-reg, S4-reg | RF | 0.63 | 0.042 | 0.030 | 0.62 | 0.029 | 0.025 |
| ELM | 0.56 | 0.042 | 0.033 | 0.51 | 0.030 | 0.025 | ||
| 30–50 | Int2, Int1-reg, SI-reg, SI-T-reg, S4-reg | RF | 0.56 | 0.046 | 0.036 | 0.59 | 0.039 | 0.029 |
| ELM | 0.40 | 0.048 | 0.035 | 0.47 | 0.035 | 0.028 | ||
| Soil Depth /cm | Input | Model | Modeling Set | Prediction Set | ||||
|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | |||
| 0–15 | IPVI, NNIR-reg, GLI-reg, NLI, RVI-reg | RF | 0.63 | 0.050 | 0.037 | 0.68 | 0.027 | 0.022 |
| ELM | 0.63 | 0.048 | 0.040 | 0.64 | 0.039 | 0.026 | ||
| 15–30 | IPVI, RVI-reg, GLI-reg, NNIR-reg, NLI-reg | RF | 0.62 | 0.041 | 0.031 | 0.63 | 0.026 | 0.022 |
| ELM | 0.53 | 0.043 | 0.034 | 0.57 | 0.028 | 0.024 | ||
| 30–50 | IPVI, RVI-reg, GLI-reg, NNIR-reg, NLI-reg | RF | 0.70 | 0.038 | 1.333 | 0.67 | 0.034 | 0.025 |
| ELM | 0.31 | 0.051 | 0.039 | 0.55 | 0.034 | 0.028 | ||
| Soil Depth /cm | Input | Model | Modeling Set | Prediction Set | ||||
|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | |||
| 0–15 | NLI, GLI-reg, IPVI, SI, SI1-reg, SI-T-reg | RF | 0.58 | 0.053 | 0.038 | 0.66 | 0.028 | 0.023 |
| ELM | 0.64 | 0.048 | 0.038 | 0.62 | 0.038 | 0.028 | ||
| 15–30 | NLI-reg, GLI-reg, RVI-reg, SI1-reg, SI-T-reg, S4-reg | RF | 0.62 | 0.041 | 0.031 | 0.58 | 0.028 | 0.023 |
| ELM | 0.52 | 0.044 | 0.035 | 0.57 | 0.035 | 0.030 | ||
| 30–50 | NLI-reg, GLI-reg, RVI-reg, Int2, Int1-reg, SI-T-reg | RF | 0.65 | 0.039 | 0.030 | 0.65 | 0.034 | 0.027 |
| ELM | 0.34 | 0.050 | 0.039 | 0.49 | 0.034 | 0.027 | ||
| Soil Depth /cm | Input | Model | Modeling Set | Prediction Set | ||||
|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | |||
| 0–15 | R-Cor, B-Cor, B-Ent, IPVI, NNIR-reg, GLI-reg, NLI, RVI-reg | RF | 0.73 | 0.045 | 0.034 | 0.70 | 0.026 | 0.023 |
| ELM | 0.60 | 0.050 | 0.041 | 0.66 | 0.041 | 0.031 | ||
| 15–30 | R-Cor, B-Cor, B-Ent, IPVI, RVI-reg, GLI-reg, NNIR-reg, NLI-reg | RF | 0.61 | 0.042 | 0.032 | 0.64 | 0.025 | 0.022 |
| ELM | 0.66 | 0.037 | 0.030 | 0.67 | 0.045 | 0.034 | ||
| 30–50 | R-Cor, B-Cor, B-Ent, IPVI, RVI-reg, GLI-reg, NNIR-reg, NLI-reg | RF | 0.64 | 0.040 | 0.032 | 0.68 | 0.034 | 0.026 |
| ELM | 0.45 | 0.046 | 0.038 | 0.62 | 0.030 | 0.023 | ||
| Soil Depth /cm | Input | Model | Modeling Set | Prediction Set | ||||
|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | R2 | RMSE | MAE | |||
| 0–15 | RTI(R-Mean, B-Mean), RTI(B-Con, B-Ent), NTI(R-Cor, B-Mean), IPVI, NNIR-reg, GLI-reg, NLI, RVI-reg | RF | 0.72 | 0.045 | 0.034 | 0.75 | 0.023 | 0.019 |
| ELM | 0.57 | 0.052 | 0.042 | 0.69 | 0.031 | 0.027 | ||
| 15–30 | RTI(R-Var, R-Sec), NTI(R-Cor, B-Var), NTI(R-Cor, B-Mean), IPVI, RVI-reg, GLI-reg, NNIR-reg, NLI-reg | RF | 0.64 | 0.040 | 0.030 | 0.67 | 0.026 | 0.022 |
| ELM | 0.63 | 0.038 | 0.030 | 0.65 | 0.045 | 0.039 | ||
| 30–50 | RTI(R-Var, R-Sec), RTI(B-Con, B-Ent), NTI(R-Cor, B-Var), IPVI, RVI-reg, GLI-reg, NNIR-reg, NLI-reg | RF | 0.68 | 0.039 | 0.031 | 0.73 | 0.034 | 0.026 |
| ELM | 0.53 | 0.042 | 0.032 | 0.69 | 0.027 | 0.022 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Ma, F.; Yu, H.; Li, Z. Inversion Model of Salt Content in Alfalfa-Covered Soil Based on a Combination of UAV Spectral and Texture Information. Agriculture 2023, 13, 1530. https://doi.org/10.3390/agriculture13081530
Zhao W, Ma F, Yu H, Li Z. Inversion Model of Salt Content in Alfalfa-Covered Soil Based on a Combination of UAV Spectral and Texture Information. Agriculture. 2023; 13(8):1530. https://doi.org/10.3390/agriculture13081530
Chicago/Turabian StyleZhao, Wenju, Fangfang Ma, Haiying Yu, and Zhaozhao Li. 2023. "Inversion Model of Salt Content in Alfalfa-Covered Soil Based on a Combination of UAV Spectral and Texture Information" Agriculture 13, no. 8: 1530. https://doi.org/10.3390/agriculture13081530
APA StyleZhao, W., Ma, F., Yu, H., & Li, Z. (2023). Inversion Model of Salt Content in Alfalfa-Covered Soil Based on a Combination of UAV Spectral and Texture Information. Agriculture, 13(8), 1530. https://doi.org/10.3390/agriculture13081530