
Engineering Design, Kinematic and Dynamic Analysis of High Lugs Rigid Driving Wheel, a Traction Device for Conventional Agricultural Wheeled Tractors

 ,
, 
 ,
, 
Abstract
1. Introduction
2. Design and Development
2.1. Design Concept
2.2. Design Requirements
2.3. Structure and Working Principle
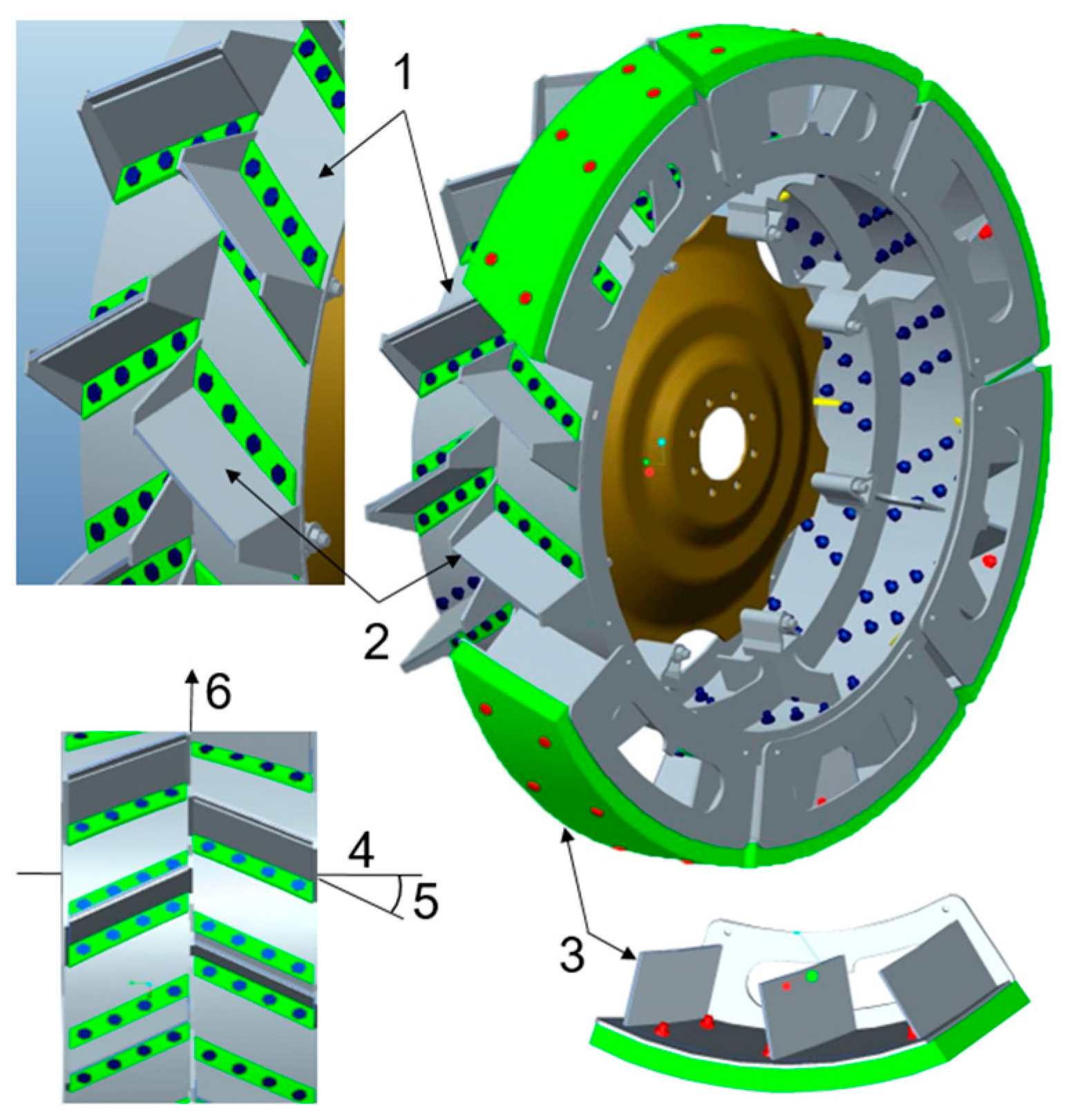
2.3.1. Wheel Structure
2.3.2. Design of Lug Working Faceplate
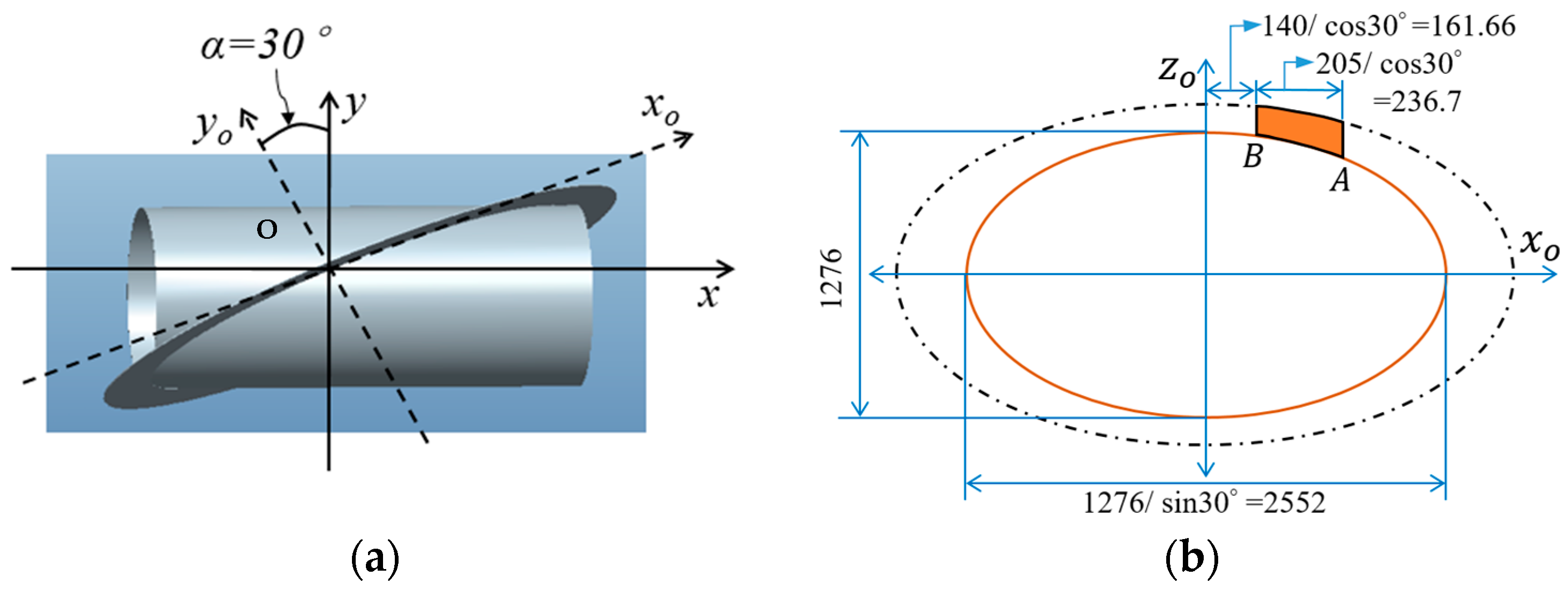
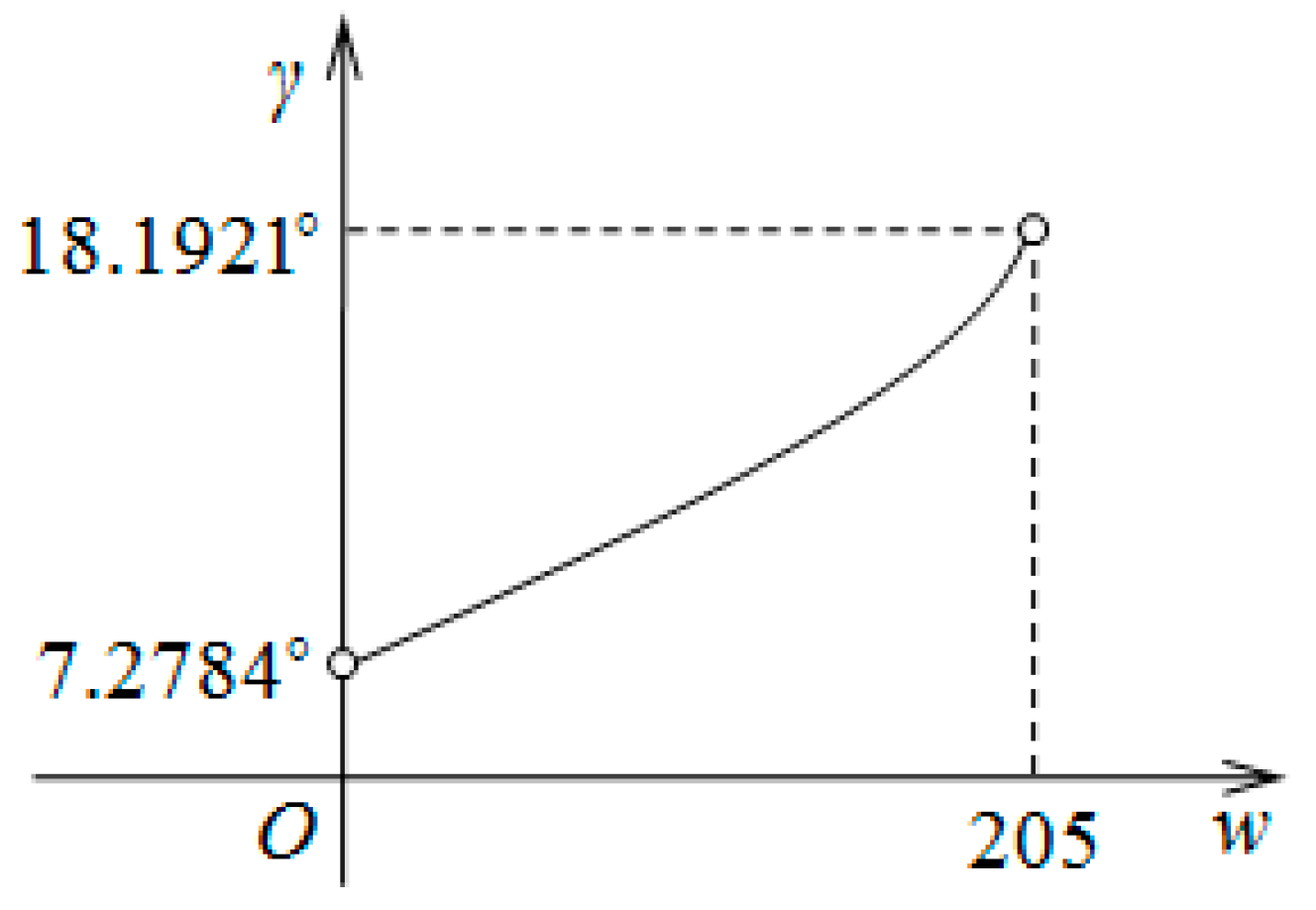
2.3.3. Mounting Angle of the Lug Working Faceplate
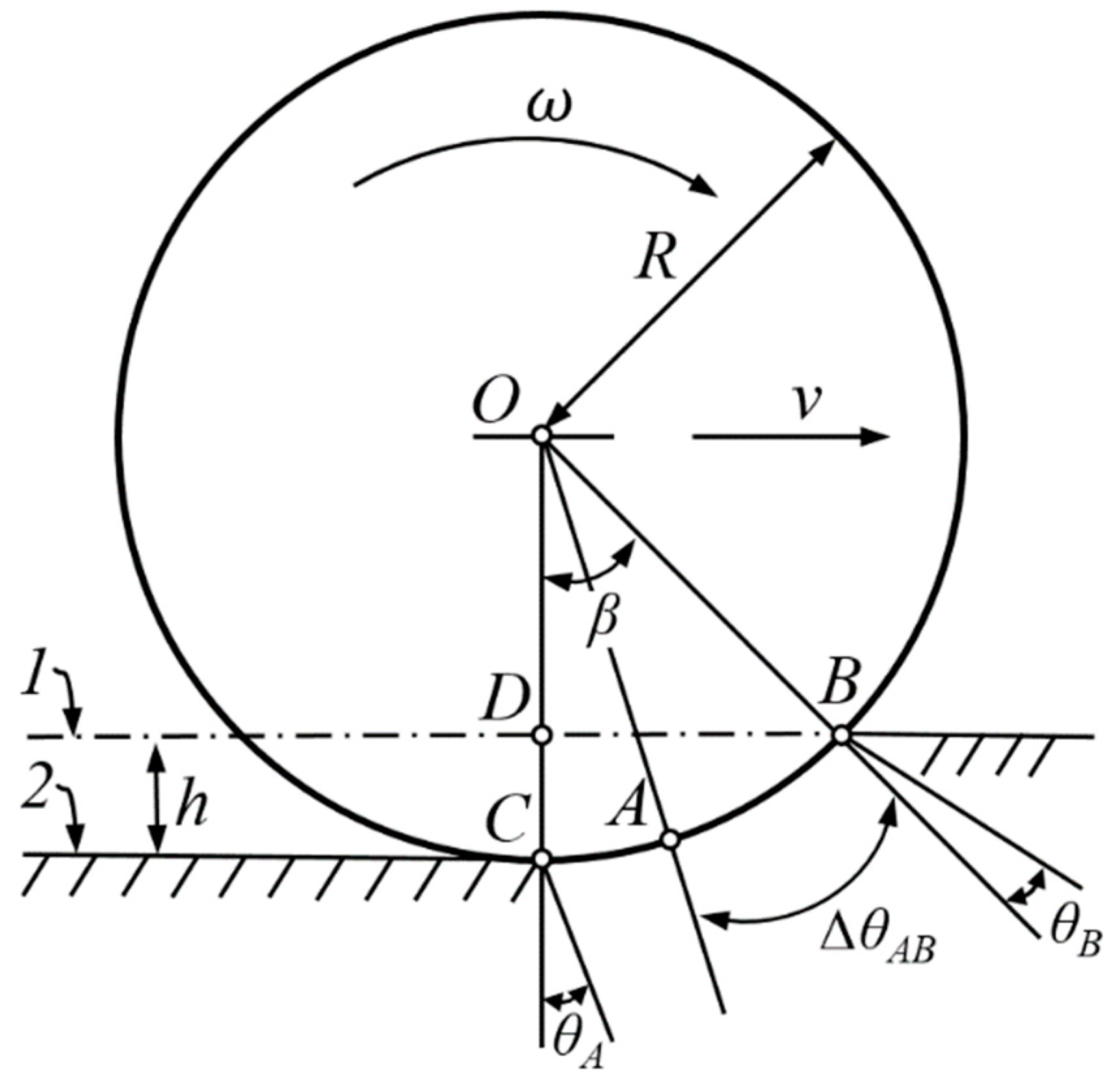
3. Kinematic Analysis
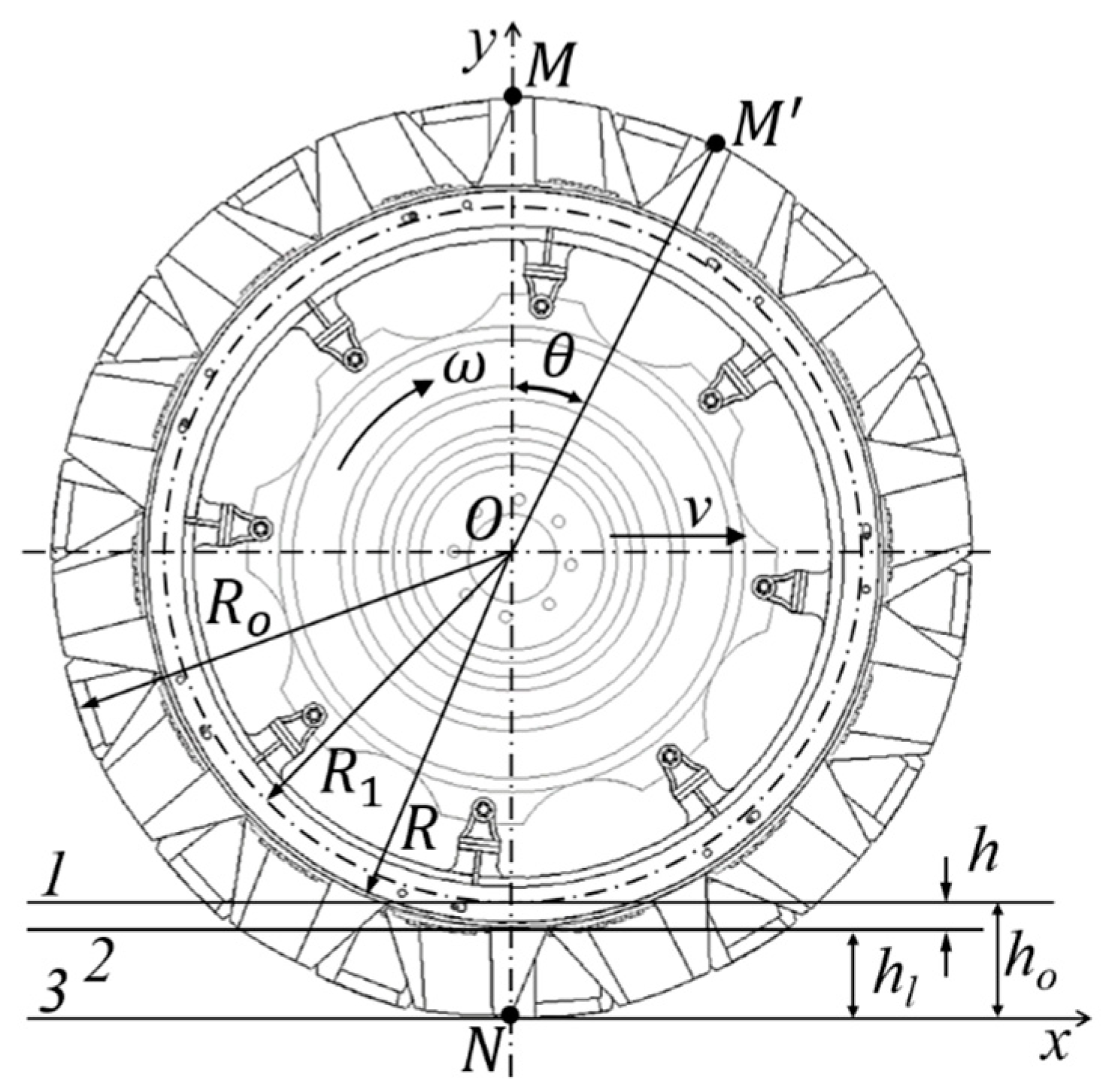
3.1. Driving Wheel Rotational and Translational Motion Relationship
3.2. Motion Trajectory of the Lug Tip of the Rigid Lugged Wheel
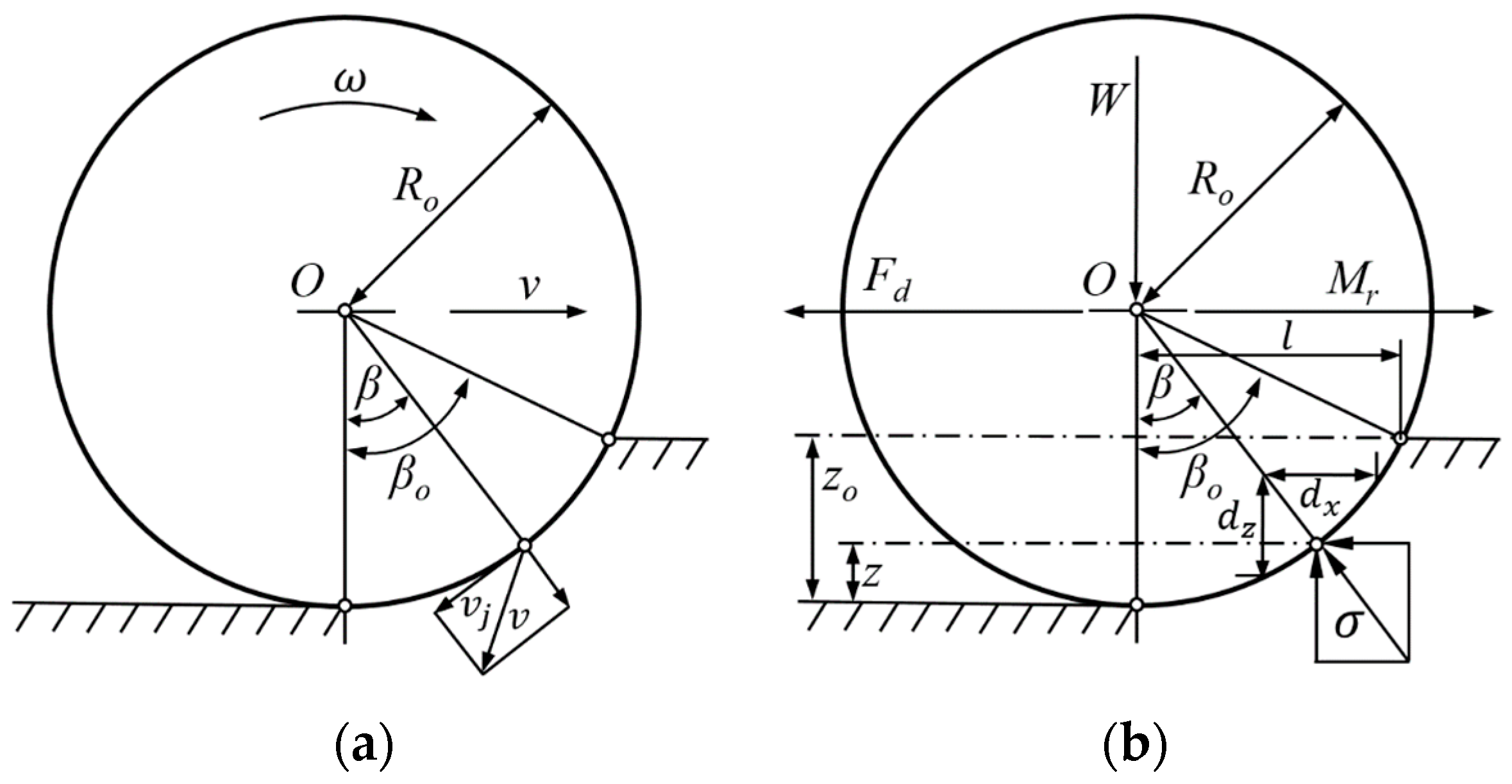
4. Dynamic Analysis
4.1. Determination of the Lugged Wheel Driving Force
4.1.1. The Normal Vector of the Lug Working Surface
4.1.2. Driving Force Analysis of the Lug
4.1.3. Soil Thrust-Driving Force Relationship Analysis of Lugged Wheel
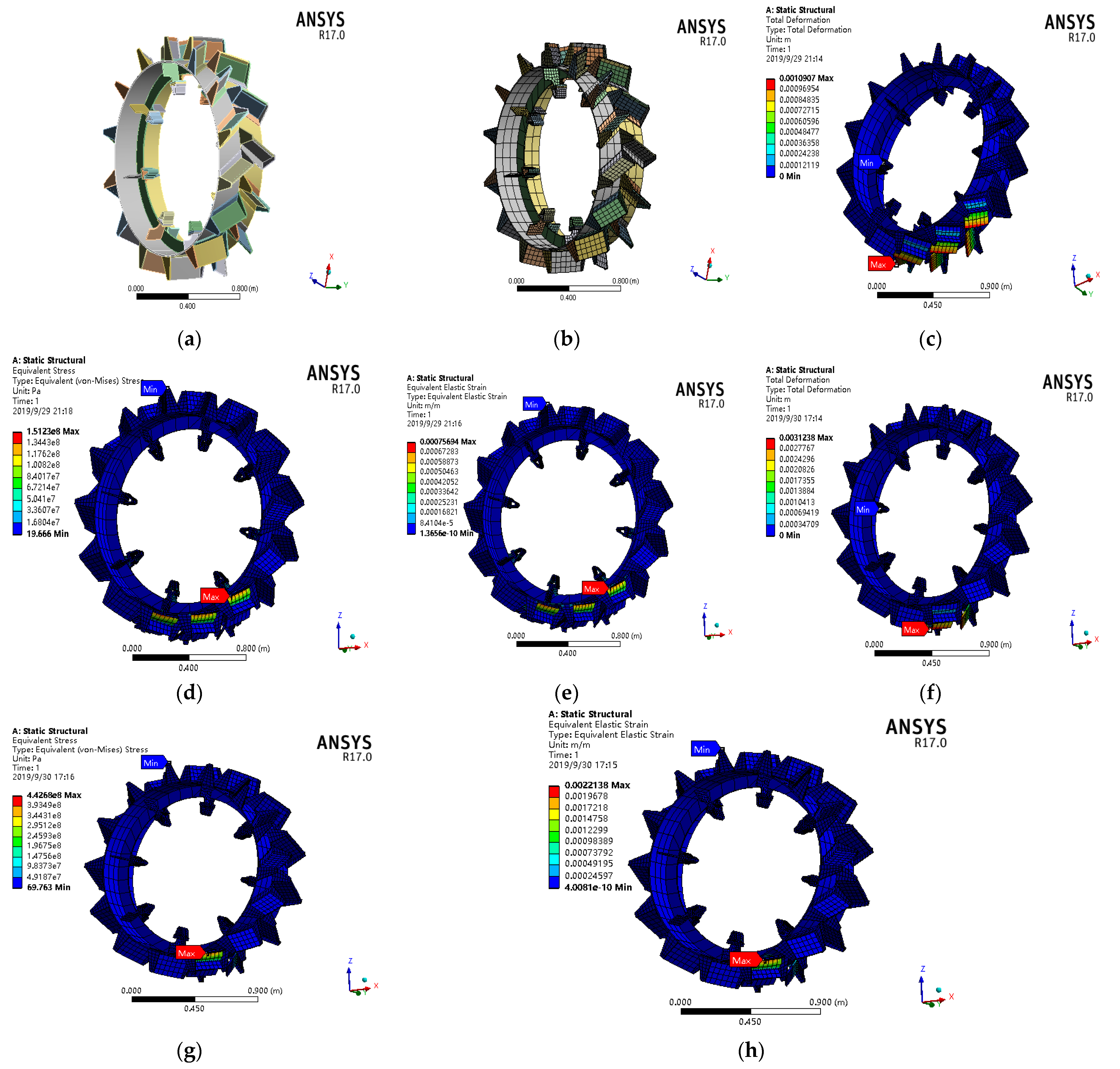
5. Model Evaluation (FEM Analysis) for Structural Stability and Optimization
5.1. Material Properties (Engineering Data)
5.2. Static Structural Analysis
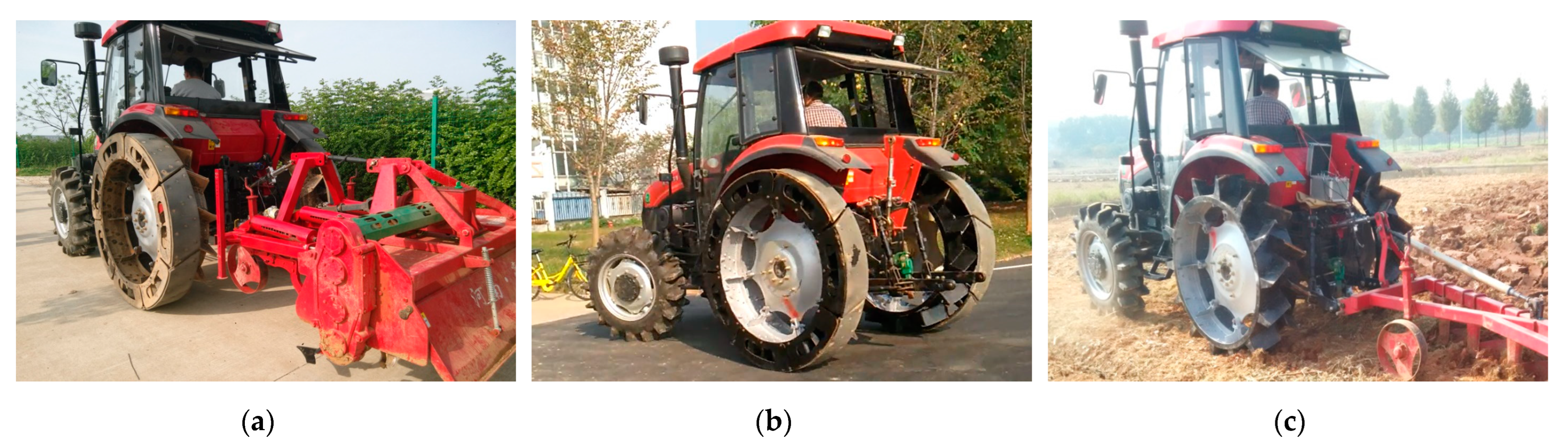
6. Wheel Prototype Development and Driving Tests
7. Conclusions
8. Patents
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Battiato, A.; Diserens, E. Tractor traction performance simulation on differently textured soils and validation: A basic study to make traction and energy requirements accessible to the practice. Soil Tillage Res. 2017, 166, 18–32. [Google Scholar] [CrossRef]
- Md-Tahir, H.; Zhang, J.; Xia, J.; Zhou, Y.; Zhou, H.; Du, J.; Sultan, M.; Mamona, H. Experimental Investigation of Traction Power Transfer Indices of Farm-Tractors for Efficient Energy Utilization in Soil Tillage and Cultivation Operations. Agronomy 2021, 11, 168. [Google Scholar] [CrossRef]
- Arvidsson, J.; Westlin, H.; Keller, T.; Gilbertsson, M. Rubber track systems for conventional tractors–Effects on soil compaction and traction. Soil Tillage Res. 2011, 117, 103–109. [Google Scholar] [CrossRef]
- Md-Tahir, H.; Zhang, J.; Xia, J.; Zhang, C.; Zhou, H.; Zhu, Y. Rigid lugged wheel for conventional agricultural wheeled tractors—Optimising traction performance and wheel–soil interaction in field operations. Biosyst. Eng. 2019, 188, 14–23. [Google Scholar] [CrossRef]
- Hamza, M.; Anderson, W. Soil compaction in cropping systems: A review of the nature, causes and possible solutions. Soil Tillage Res. 2005, 82, 121–145. [Google Scholar] [CrossRef]
- Battiato, A.; Diserens, E. Influence of tyre inflation pressure and wheel load on the traction performance of a 65 kW MFWD tractor on a cohesive soil. J. Agric. Sci. 2013, 5, 197. [Google Scholar]
- Molari, G.; Bellentani, L.; Guarnieri, A.; Walker, M.; Sedoni, E. Performance of an agricultural tractor fitted with rubber tracks. Biosyst. Eng. 2012, 111, 57–63. [Google Scholar] [CrossRef]
- Rasool, S.; Raheman, H. Improving the tractive performance of walking tractors using rubber tracks. Biosyst. Eng. 2018, 167, 51–62. [Google Scholar] [CrossRef]
- Keen, A.; Hall, N.; Soni, P.; Gholkar, M.D.; Cooper, S.; Ferdous, J. A review of the tractive performance of wheeled tractors and soil management in lowland intensive rice production. J. Terramechanics 2013, 50, 45–62. [Google Scholar] [CrossRef]
- Hermawan, W.; Yamazaki, M.; Oida, A.J. Theoretical analysis of soil reaction on a lug of the movable lug cage wheel. J. Terramechanics 2000, 37, 65–86. [Google Scholar] [CrossRef]
- Xie, X.; Gao, F.; Huang, C.; Zeng, W. Design and development of a new transformable wheel used in amphibious all-terrain vehicles (A-ATV). J. Terramechanics 2017, 69, 45–61. [Google Scholar] [CrossRef]
- Raper, R. Agricultural traffic impacts on soil. J. Terramechanics 2005, 42, 259–280. [Google Scholar] [CrossRef]
- Srivastava, A.K.; Goering, C.E.; Rohrbach, R.P.; Buckmaster, D.R. Engineering Principles of Agricultural Machines, 2nd ed.; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2006. [Google Scholar]
- Bekker, M. Evolution of approach to off-road locomotion. J. Terramechanics 1967, 4, 49–58. [Google Scholar] [CrossRef]
- Okello, A. A review of soil strength measurement techniques for prediction of terrain vehicle performance. J. Agric. Eng. Res. 1991, 50, 129–155. [Google Scholar] [CrossRef]
- Söhne, W. Terramechanics and its influence on the concepts of tractors, tractor power development, and energy consumption. J. Terramechanics 1976, 13, 27–43. [Google Scholar] [CrossRef]
- Wong, J.Y. Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and Design, 2nd ed.; Butterworth-Heinemann is an imprint of Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Zhang, J.; Xia, J.; Zhou, Y.; Md-Tahir, H. High Power Tractor Drive Wheel. China. Patent No. ZL 2015 1 0922181.8. CNIPA: China National Intellectual Property Administration (CNIPA), 2019. [Google Scholar]
- Patel, S.; Mani, I. Effect of multiple passes of tractor with varying normal load on subsoil compaction. J. Terramechanics 2011, 48, 277–284. [Google Scholar] [CrossRef]
- Taghavifar, H.; Mardani, A. Effect of velocity, wheel load and multipass on soil compaction. J. Saudi Soc. Agric. Sci. 2014, 13, 57–66. [Google Scholar] [CrossRef]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons. Inc.: New York, NY, USA, 2001. [Google Scholar]
- Bekker, M.G. Theory of Land Locomotion; The University of Michigan Press: Ann Arbor, MI, USA, 1956. [Google Scholar]
- Janosi, Z.; Hanamoto, B. The analytical determination of drawbar pull as a function of slip for tracked vehicles in deformable soils. In Proceedings of the ISTVS 1st Intrnational Conference on Mechanics of Soil-Vehicle Systems, Edizioni Minerva Tecnica, Torino, Italy; 1961. [Google Scholar]
- Wong, J.-Y.; Reece, A. Prediction of rigid wheel performance based on the analysis of soil-wheel stresses: Part II. Performance of towed rigid wheels. J. Terramechanics 1967, 4, 7–25. [Google Scholar] [CrossRef]
- Wong, J.; Preston-Thomas, J. On the characterization of the shear stress-displacement relationship of terrain. J. Terramechanics 1983, 19, 225–234. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| w (mm) | 0 | 41 | 82 | 123 | 164 | 205 | |
|---|---|---|---|---|---|---|---|
| γ° | Model measurements | 7.27844 | 9.4272 | 11.5894 | 13.7684 | 15.9680 | 18.1921 |
| Theoretical calculations | 7.278357 | 9.427167 | 11.589370 | 13.768447 | 15.968037 | 18.192075 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Md-Tahir, H.; Zhang, J.; Zhou, Y.; Sultan, M.; Ahmad, F.; Du, J.; Ullah, A.; Hussain, Z.; Xia, J. Engineering Design, Kinematic and Dynamic Analysis of High Lugs Rigid Driving Wheel, a Traction Device for Conventional Agricultural Wheeled Tractors. Agriculture 2023, 13, 493. https://doi.org/10.3390/agriculture13020493
Md-Tahir H, Zhang J, Zhou Y, Sultan M, Ahmad F, Du J, Ullah A, Hussain Z, Xia J. Engineering Design, Kinematic and Dynamic Analysis of High Lugs Rigid Driving Wheel, a Traction Device for Conventional Agricultural Wheeled Tractors. Agriculture. 2023; 13(2):493. https://doi.org/10.3390/agriculture13020493
Chicago/Turabian StyleMd-Tahir, Hafiz, Jumin Zhang, Yong Zhou, Muhammad Sultan, Fiaz Ahmad, Jun Du, Amman Ullah, Zawar Hussain, and Junfang Xia. 2023. "Engineering Design, Kinematic and Dynamic Analysis of High Lugs Rigid Driving Wheel, a Traction Device for Conventional Agricultural Wheeled Tractors" Agriculture 13, no. 2: 493. https://doi.org/10.3390/agriculture13020493
APA StyleMd-Tahir, H., Zhang, J., Zhou, Y., Sultan, M., Ahmad, F., Du, J., Ullah, A., Hussain, Z., & Xia, J. (2023). Engineering Design, Kinematic and Dynamic Analysis of High Lugs Rigid Driving Wheel, a Traction Device for Conventional Agricultural Wheeled Tractors. Agriculture, 13(2), 493. https://doi.org/10.3390/agriculture13020493