
Control System of a Motor-Driven Precision No-Tillage Maize Planter Based on the CANopen Protocol



Abstract
:1. Introduction
2. Materials and Methods
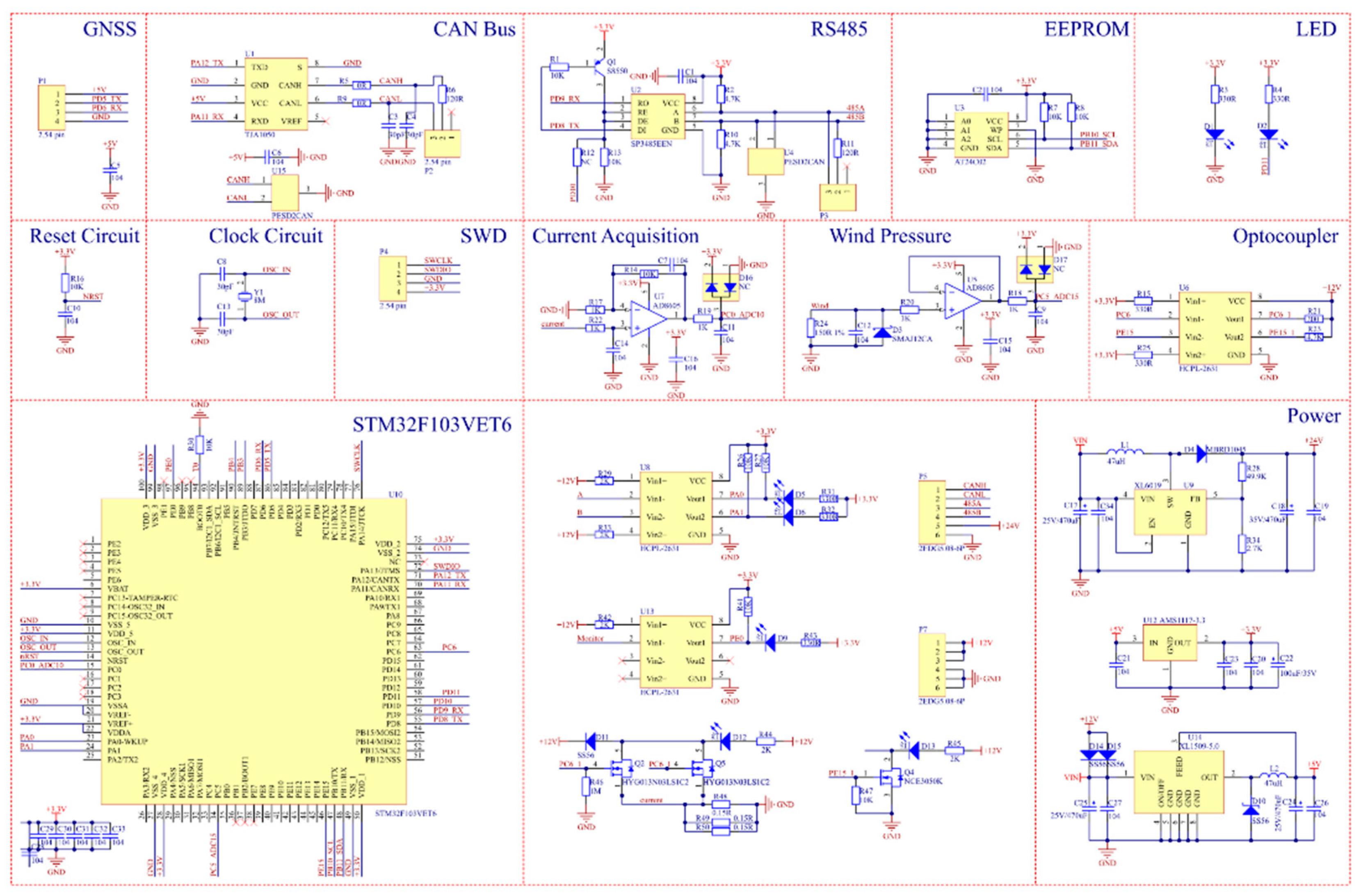
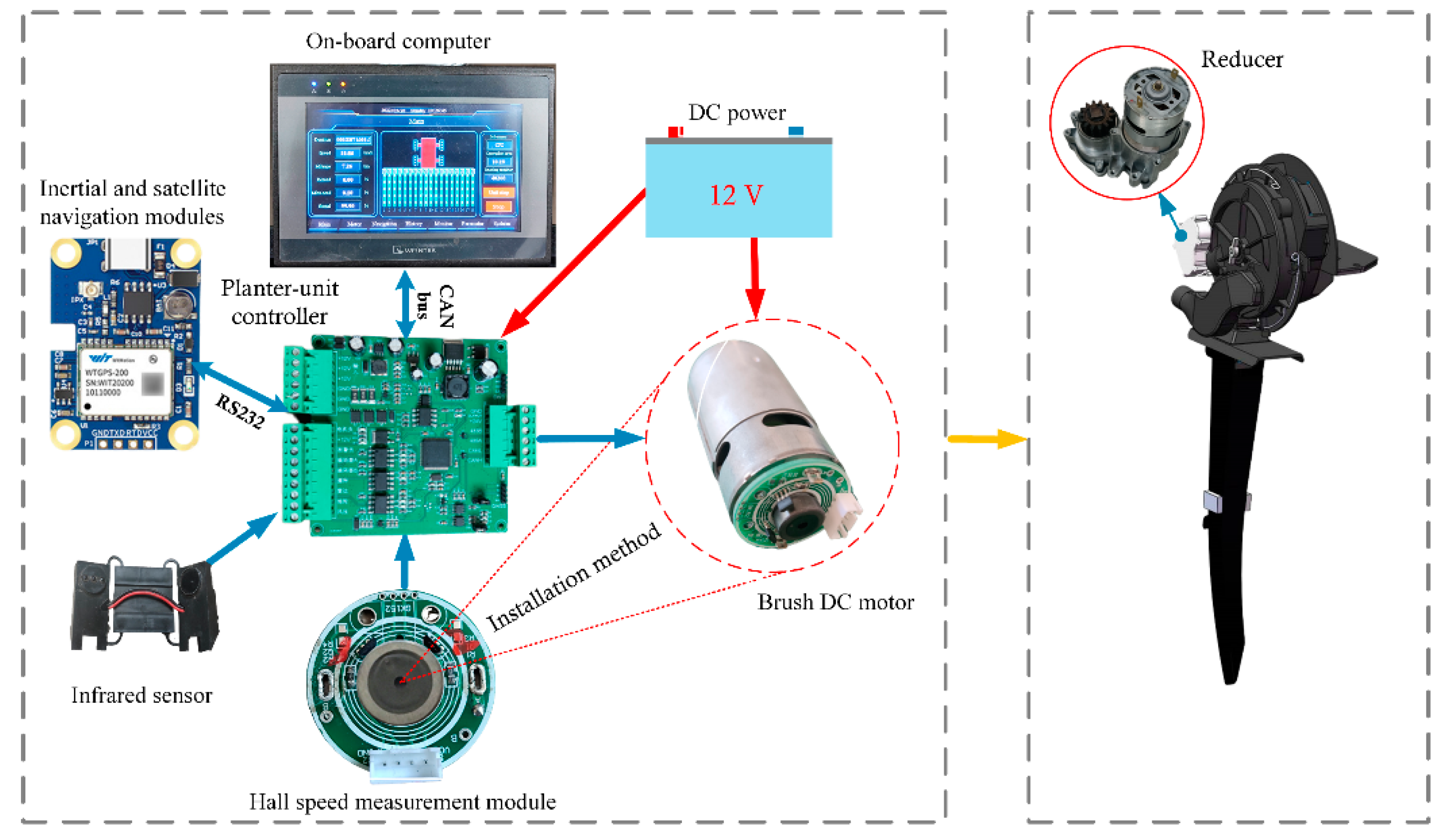
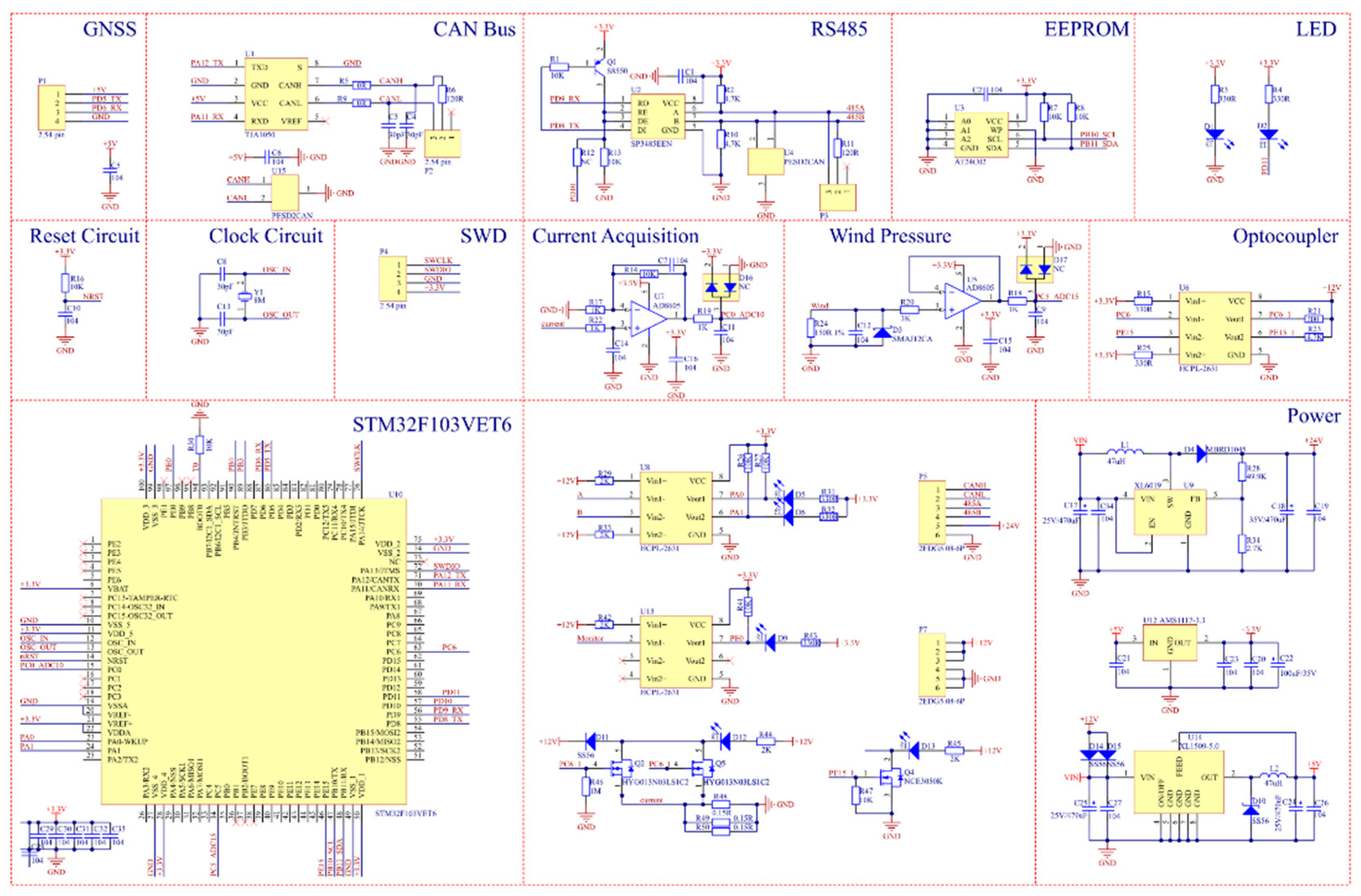
2.1. System Components
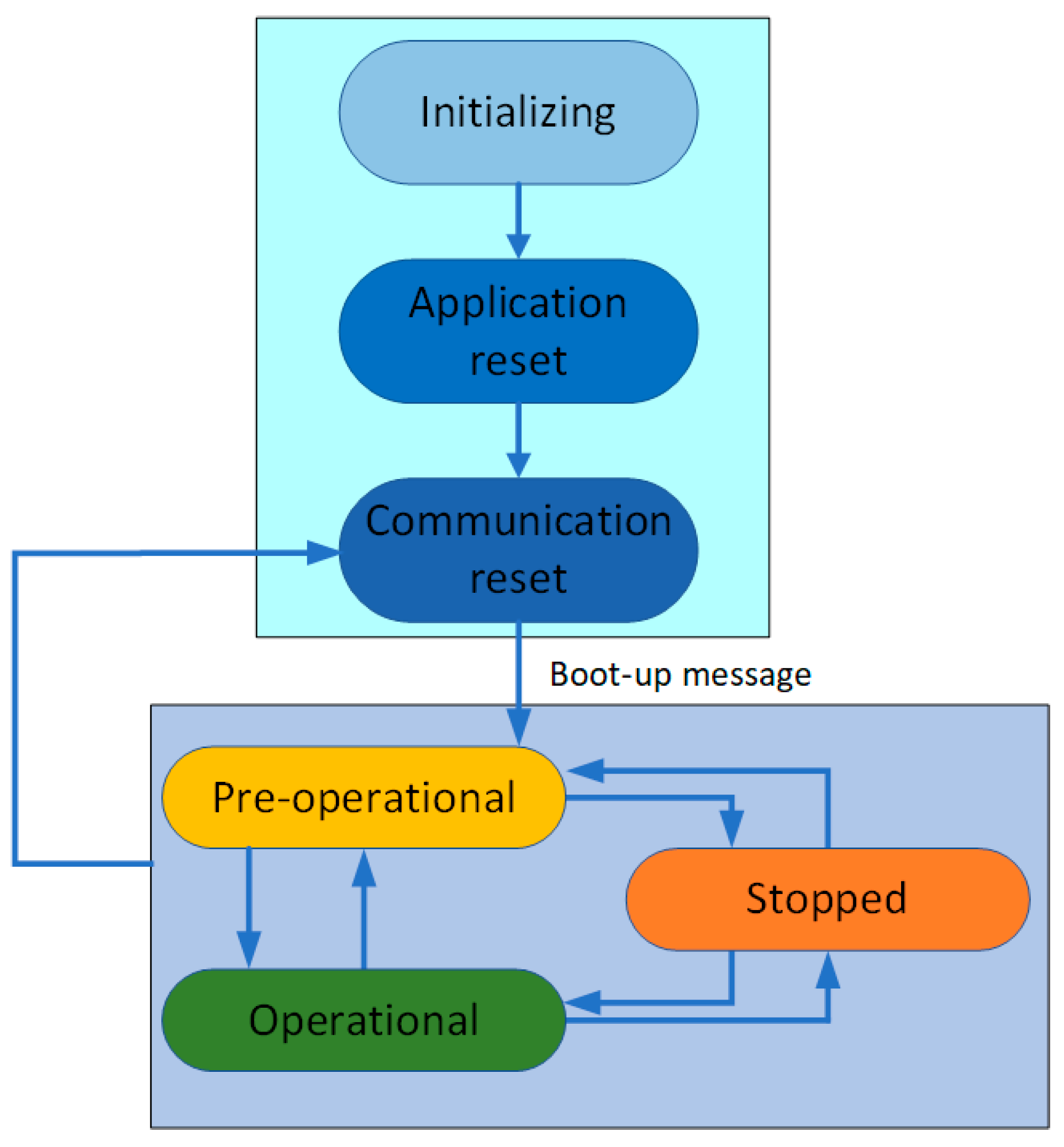
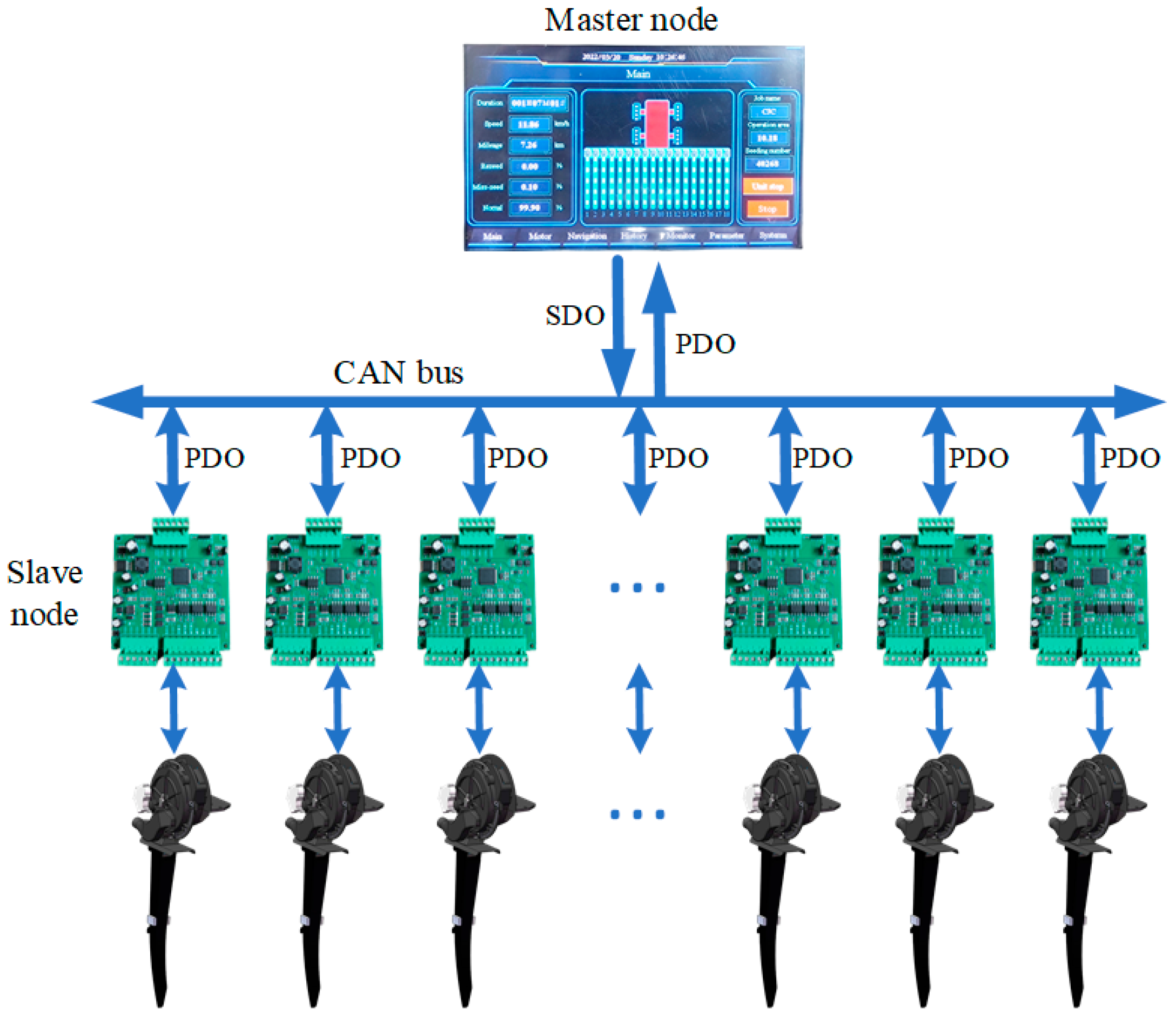
2.2. CAN Bus with CANopen Protocol
2.3. Motor Speed Matching Operation Speed
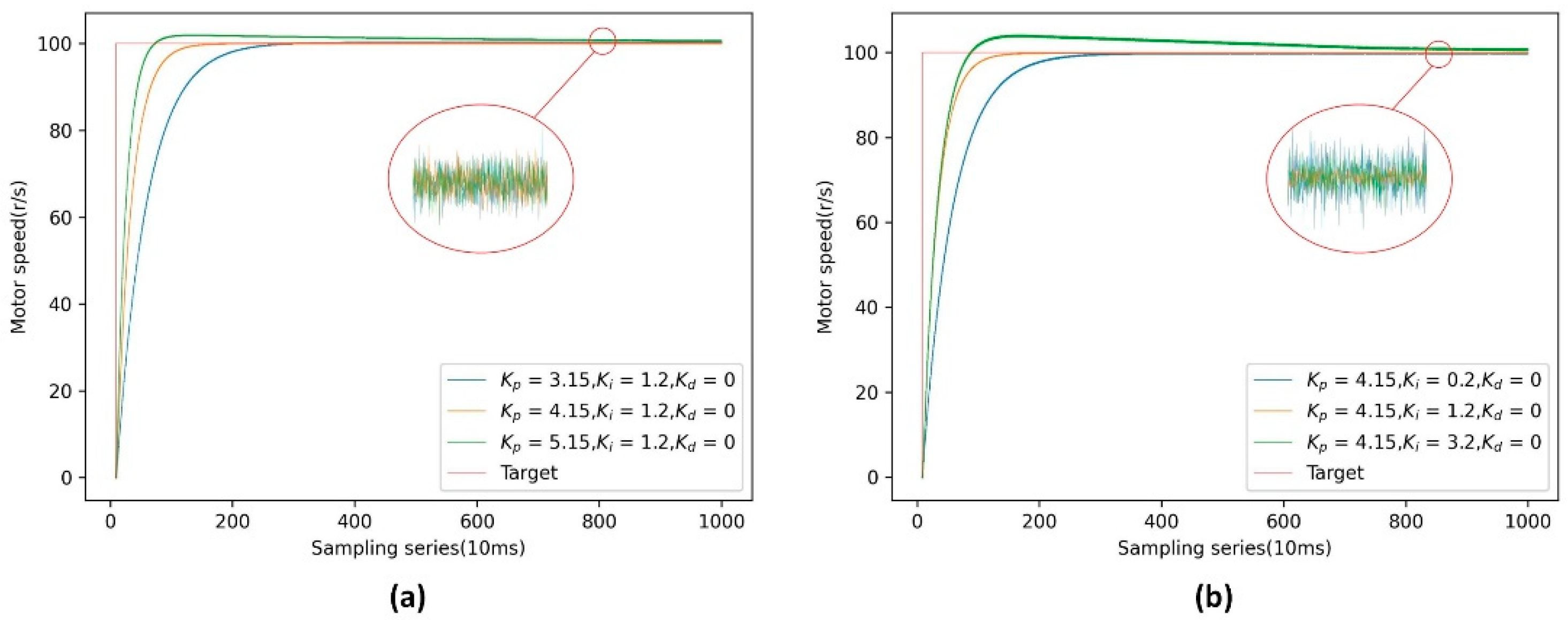
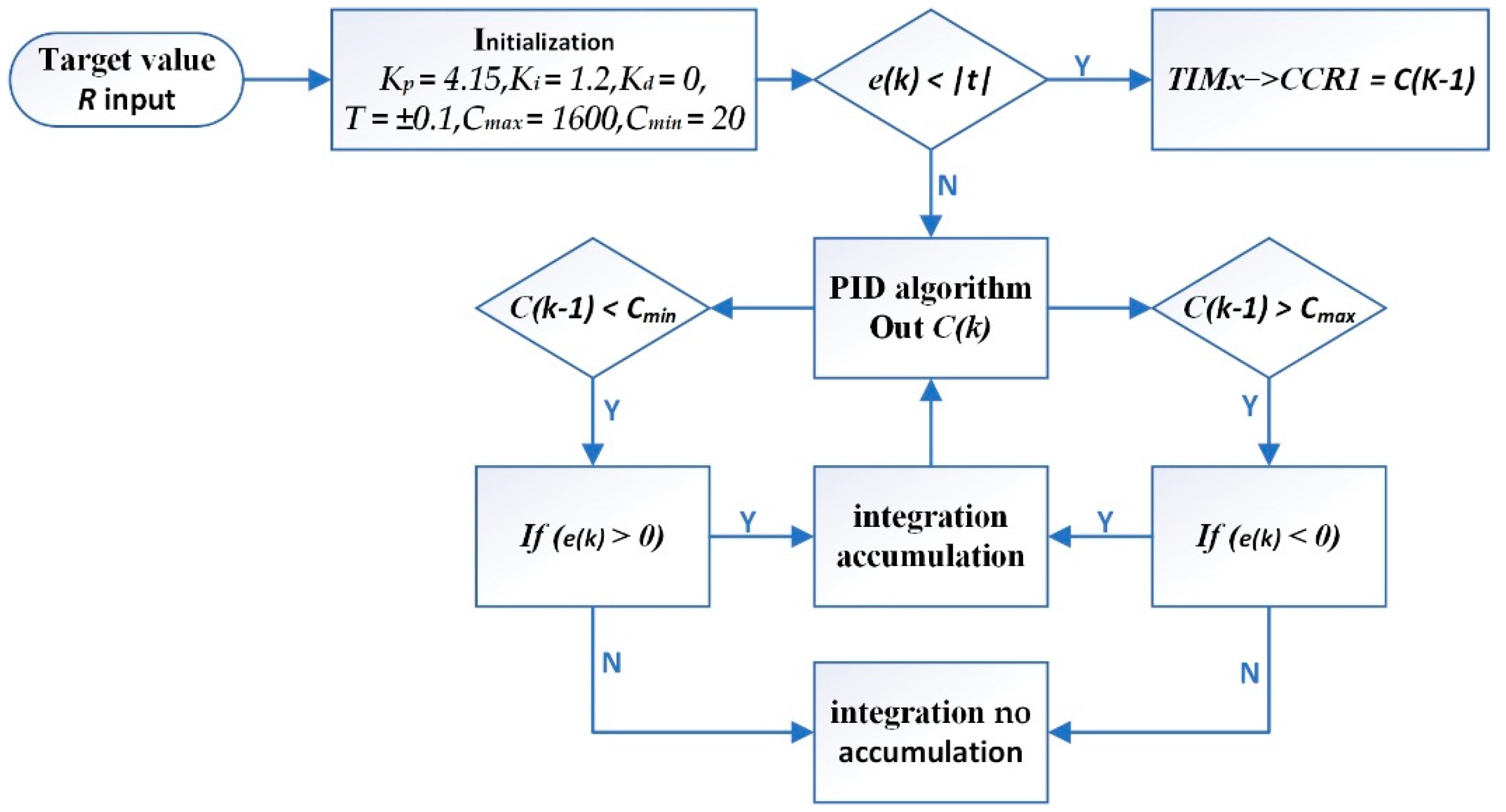
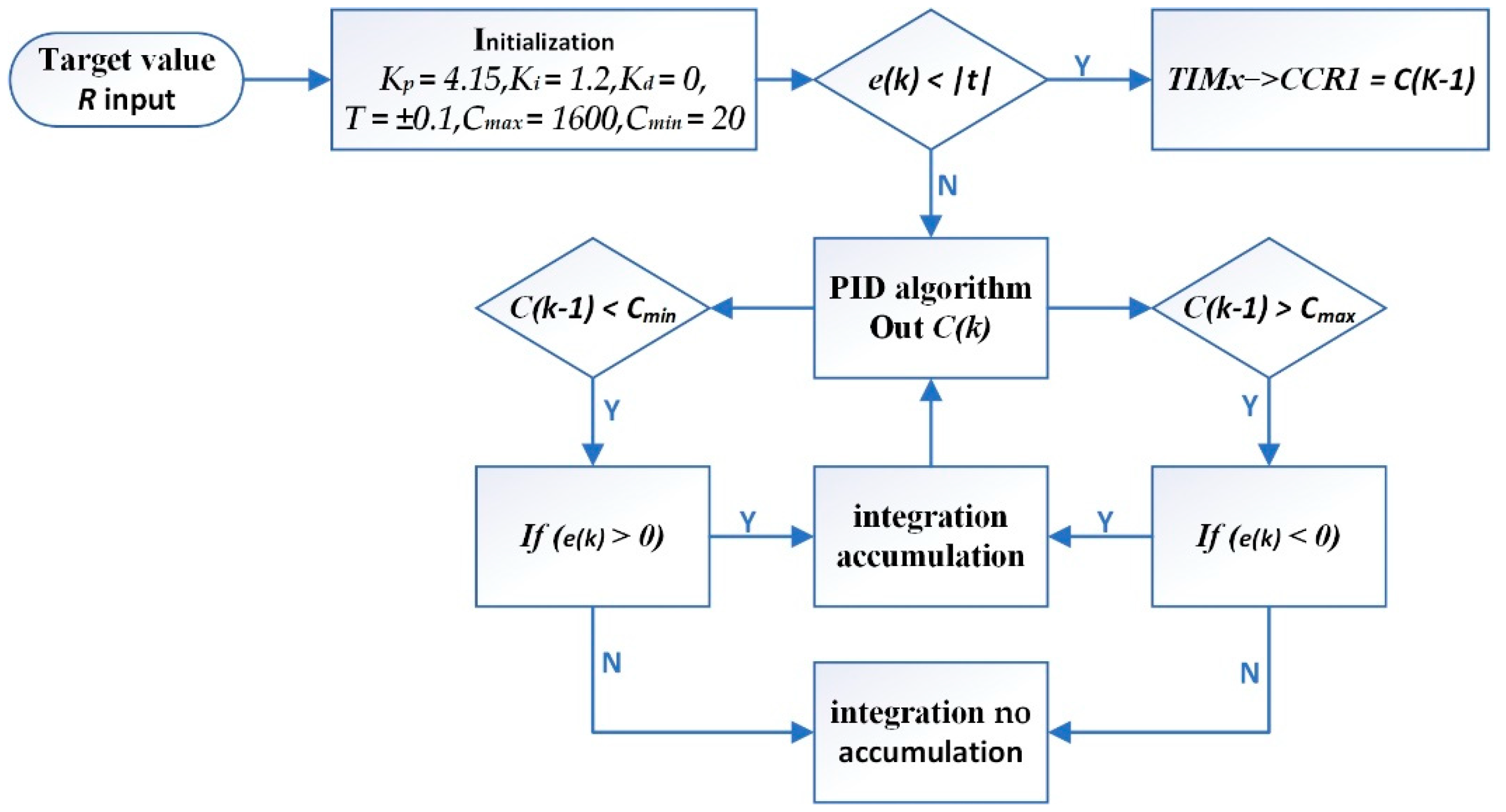
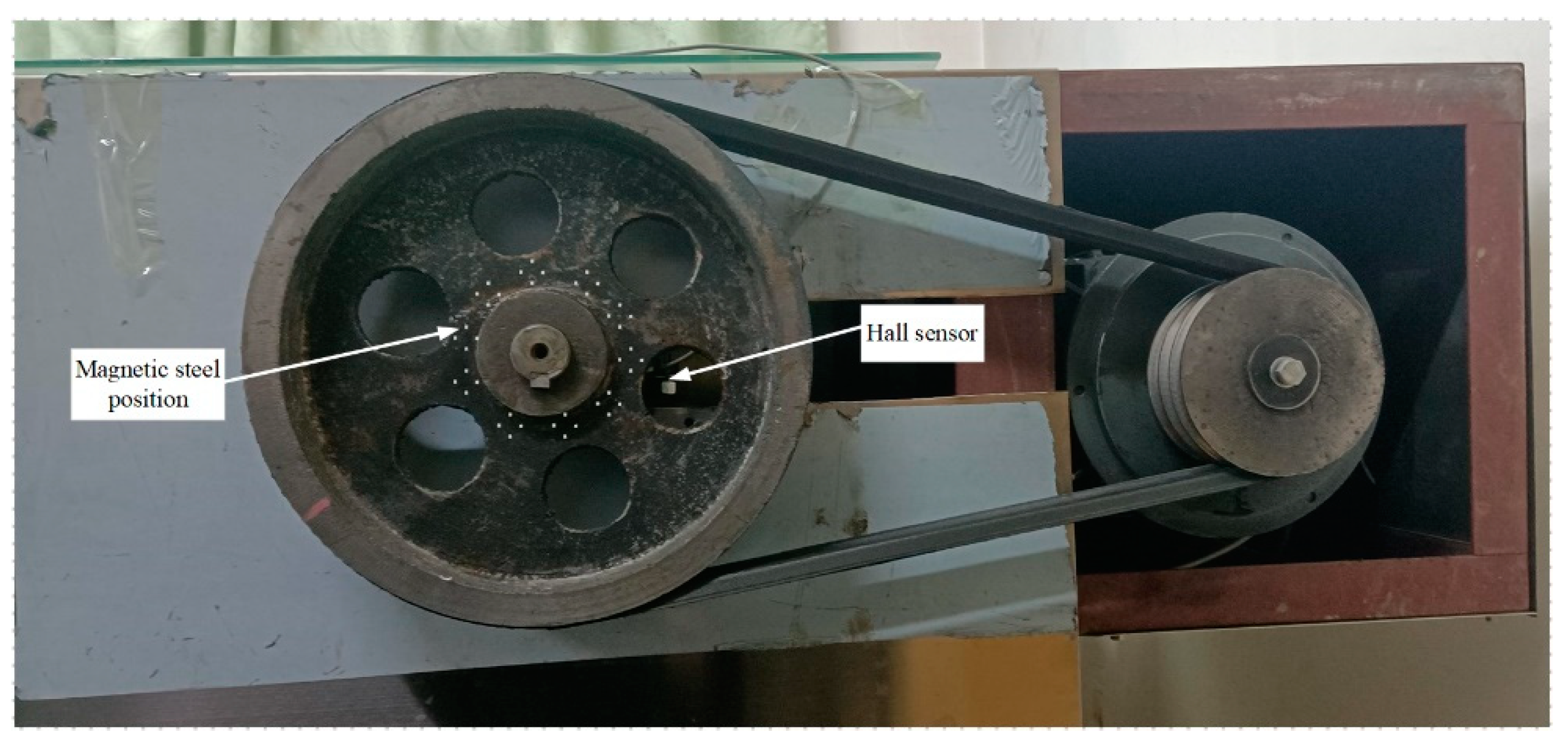
2.4. Speed Acquisition and Motor Control
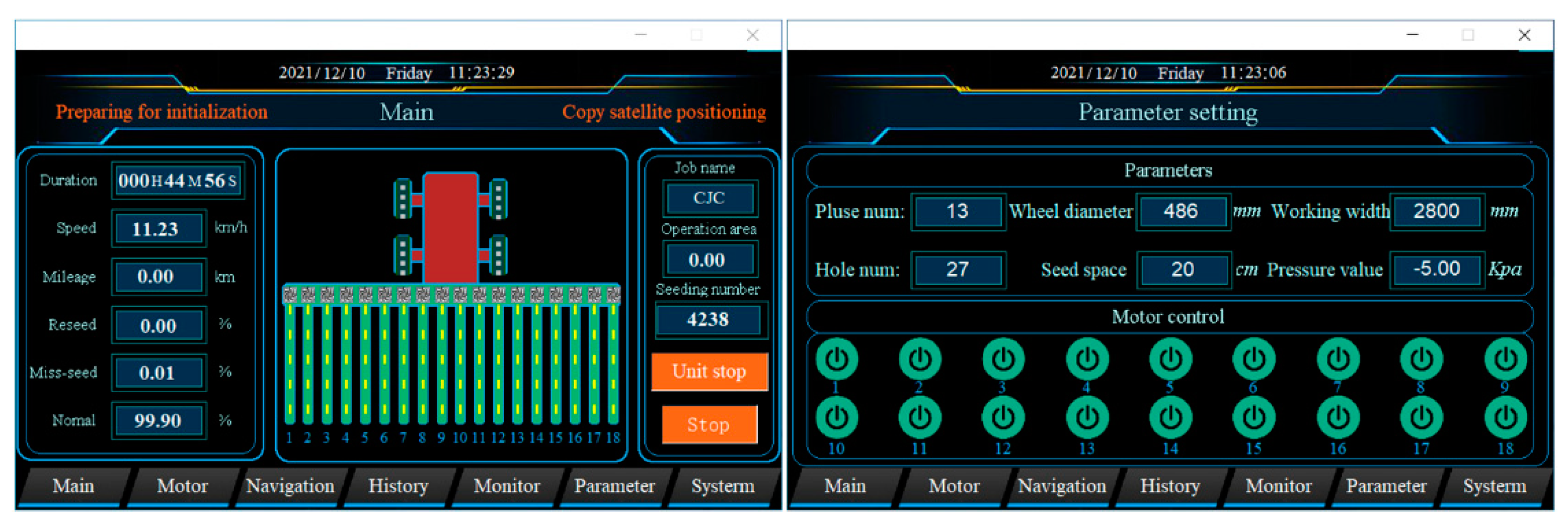
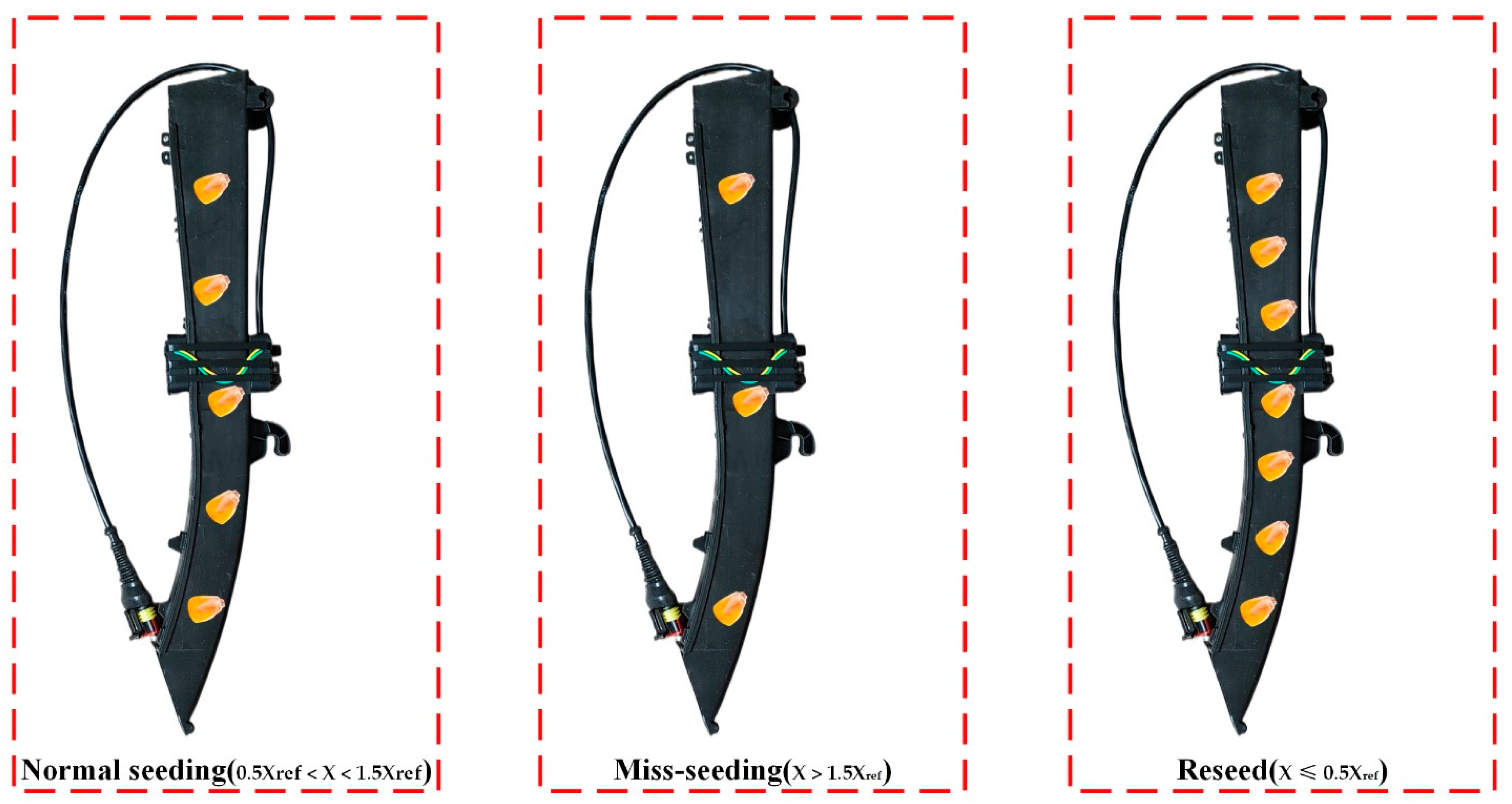
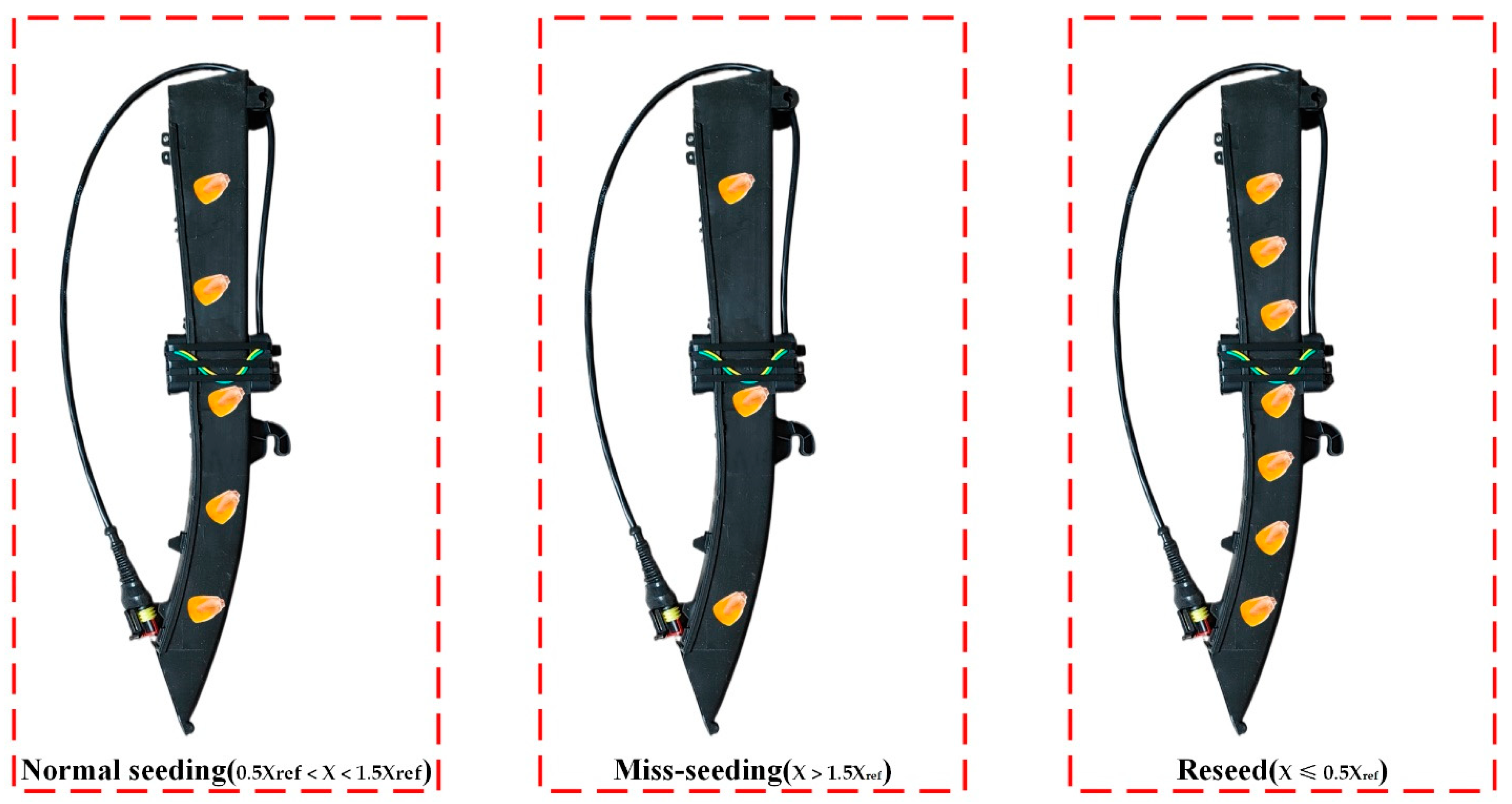
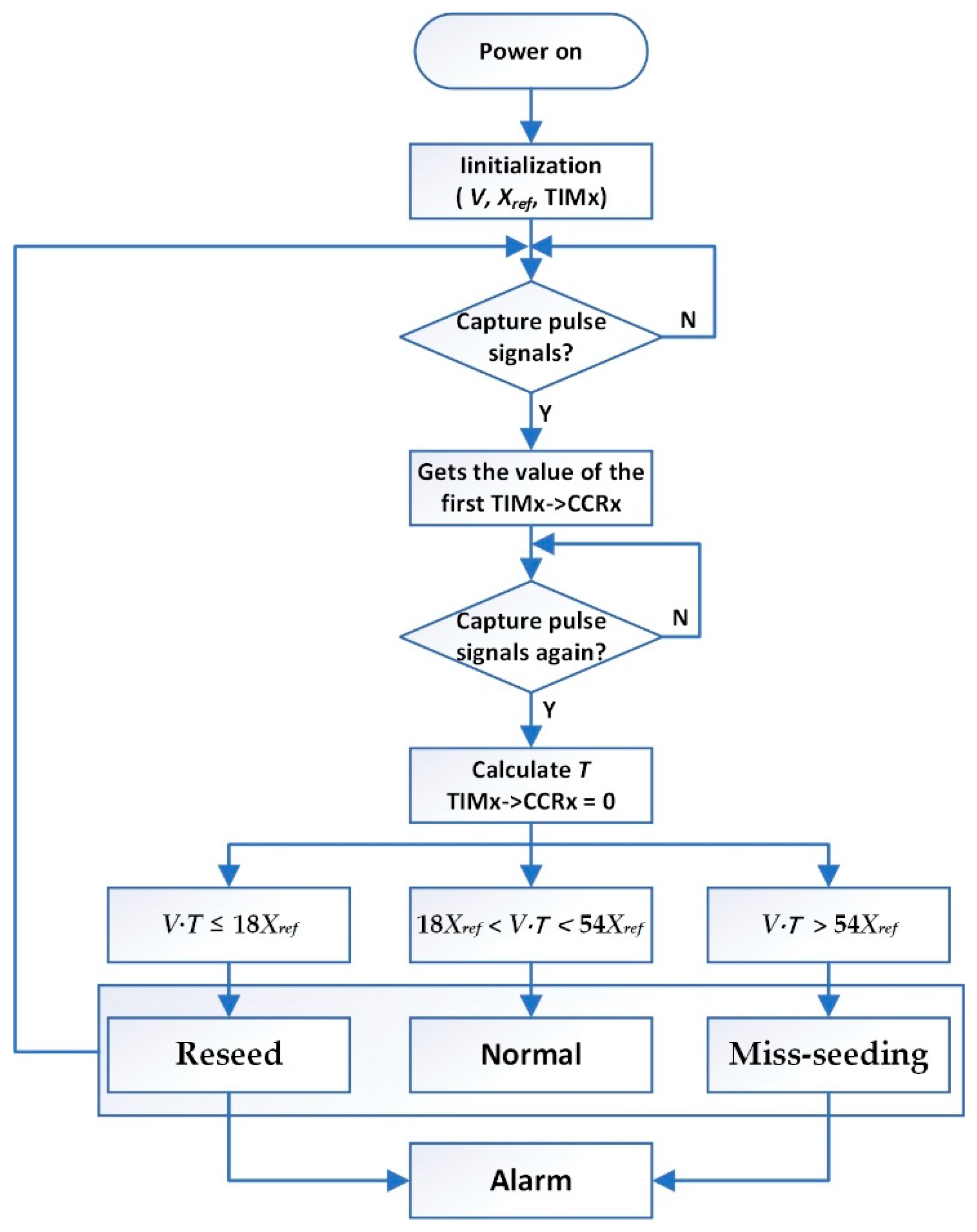
2.5. Sowing Monitoring
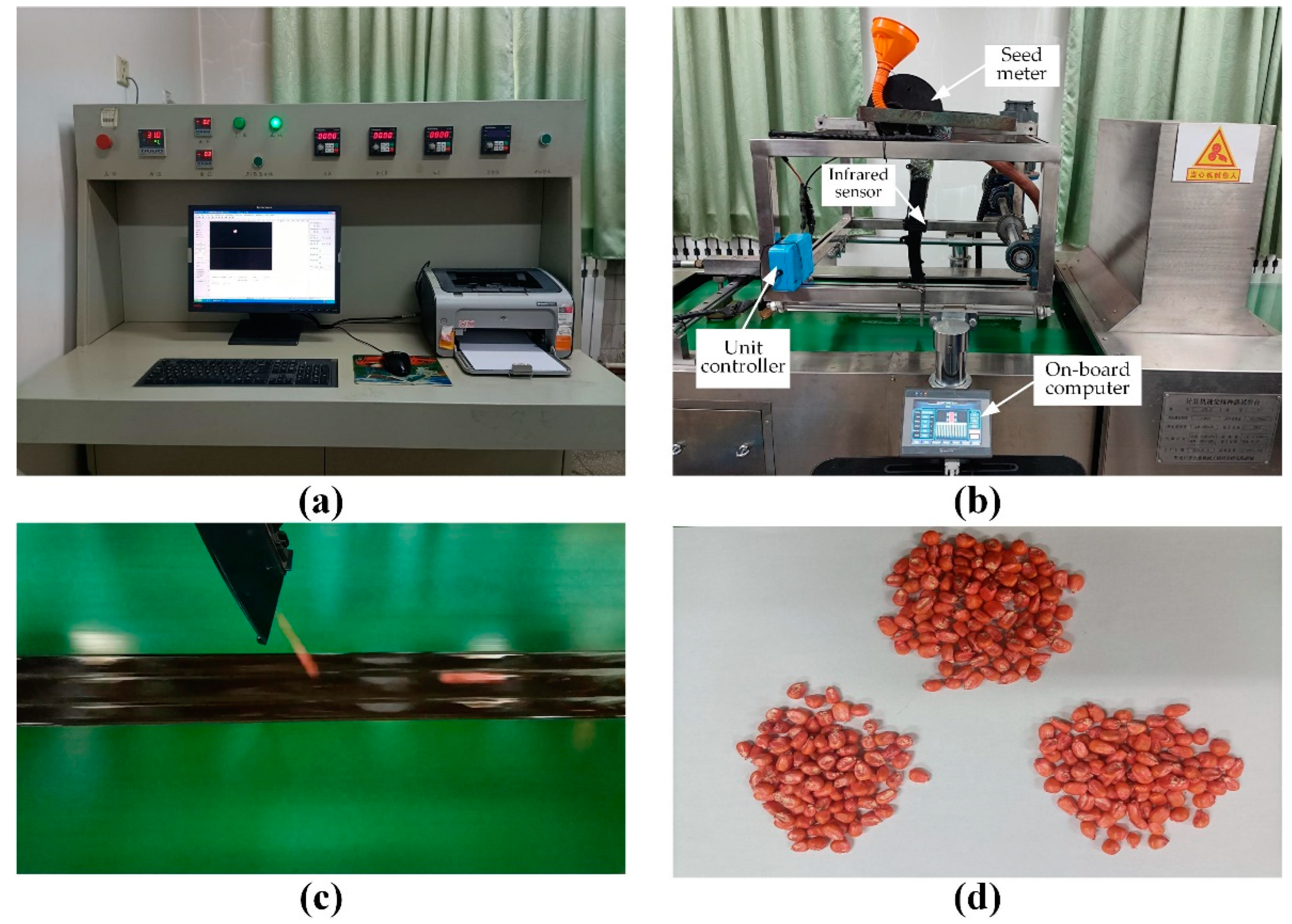
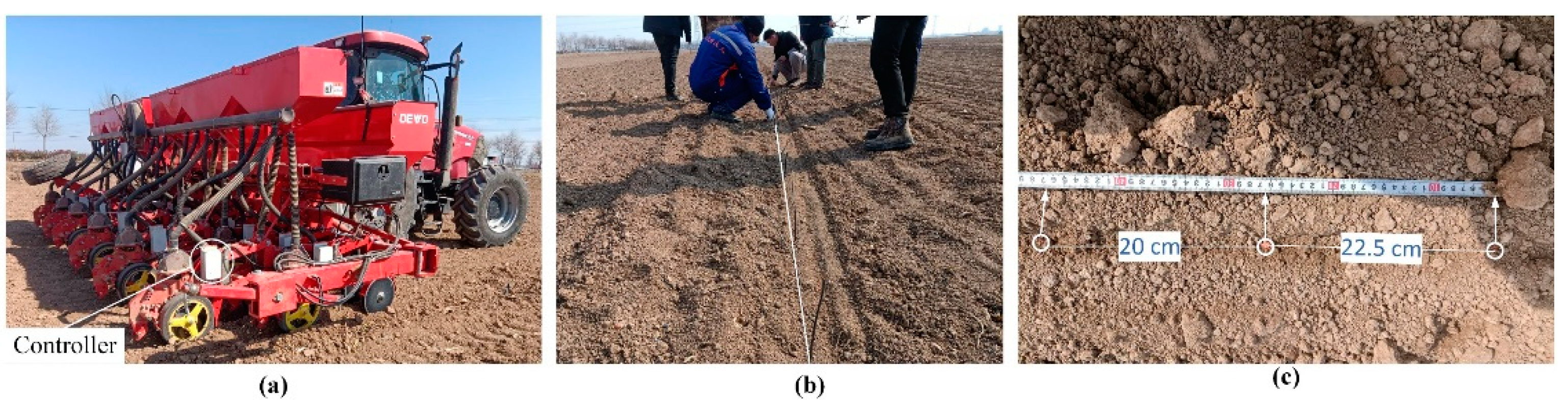
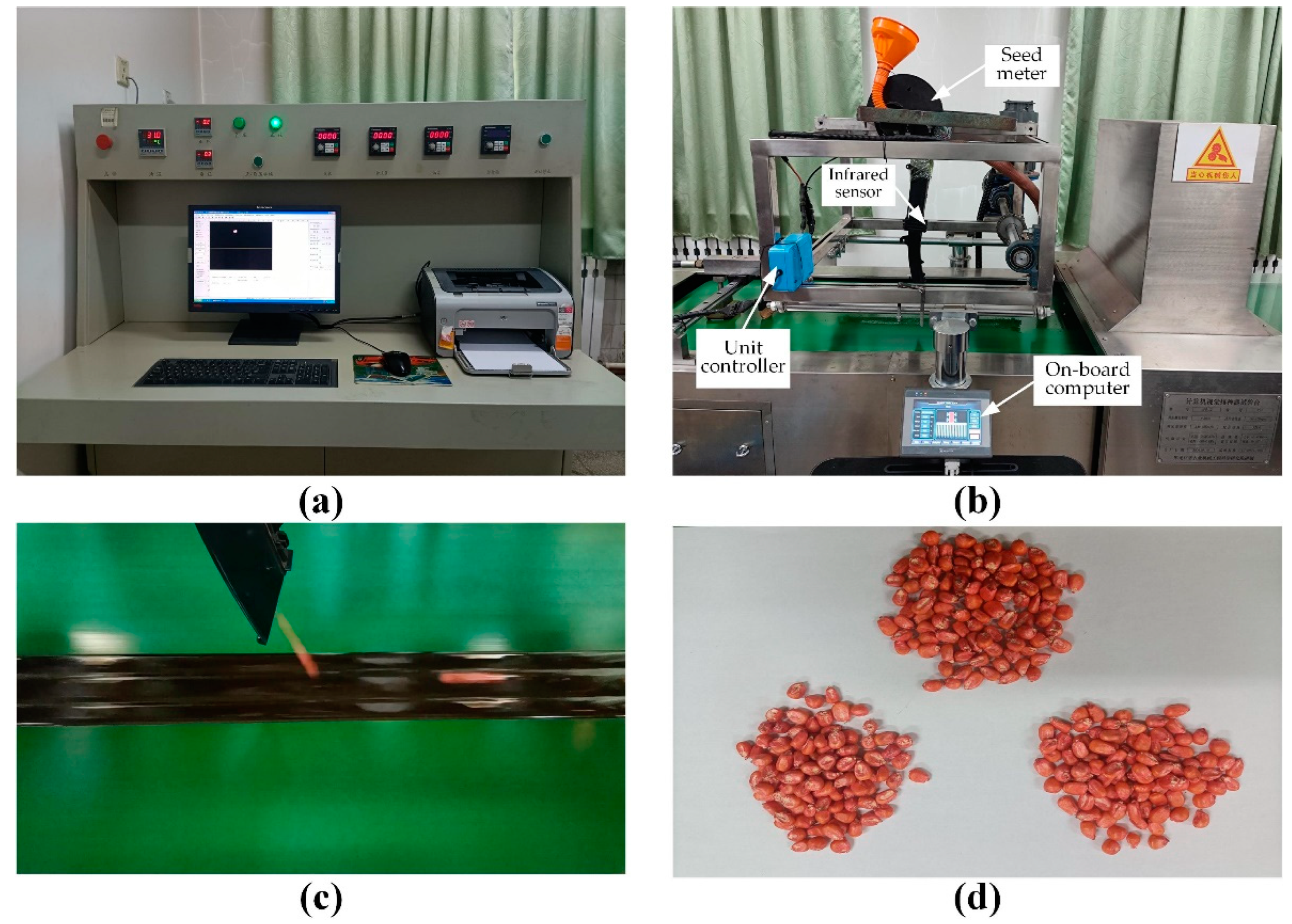
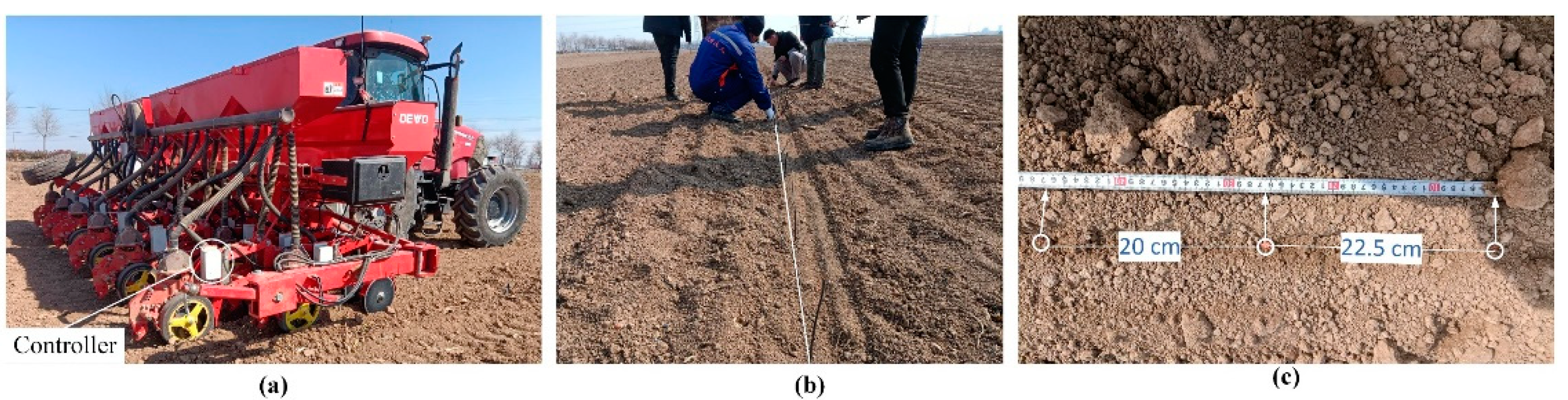
2.6. Performance Test of the Seeder Monitoring and Control System
3. Results and Discussion
3.1. Photoelectric Sensor Monitoring Performance and Real-Time Online Monitoring Test
3.2. Differences in Seeding Performance among Different Planting Units in the Field
3.3. Discussion of the Results
4. Conclusions
- (1)
- In terms of photoelectric sensor detection performance, there was not a large difference between the indoor bench tests and field tests with dust pollution, and the detection accuracy reached 99.8%. This also shows that the sensor has a strong penetration ability and a large radiation detection surface. The fault alarm function of the system was accurate and timely, and the fault alarm rate reached 100%.
- (2)
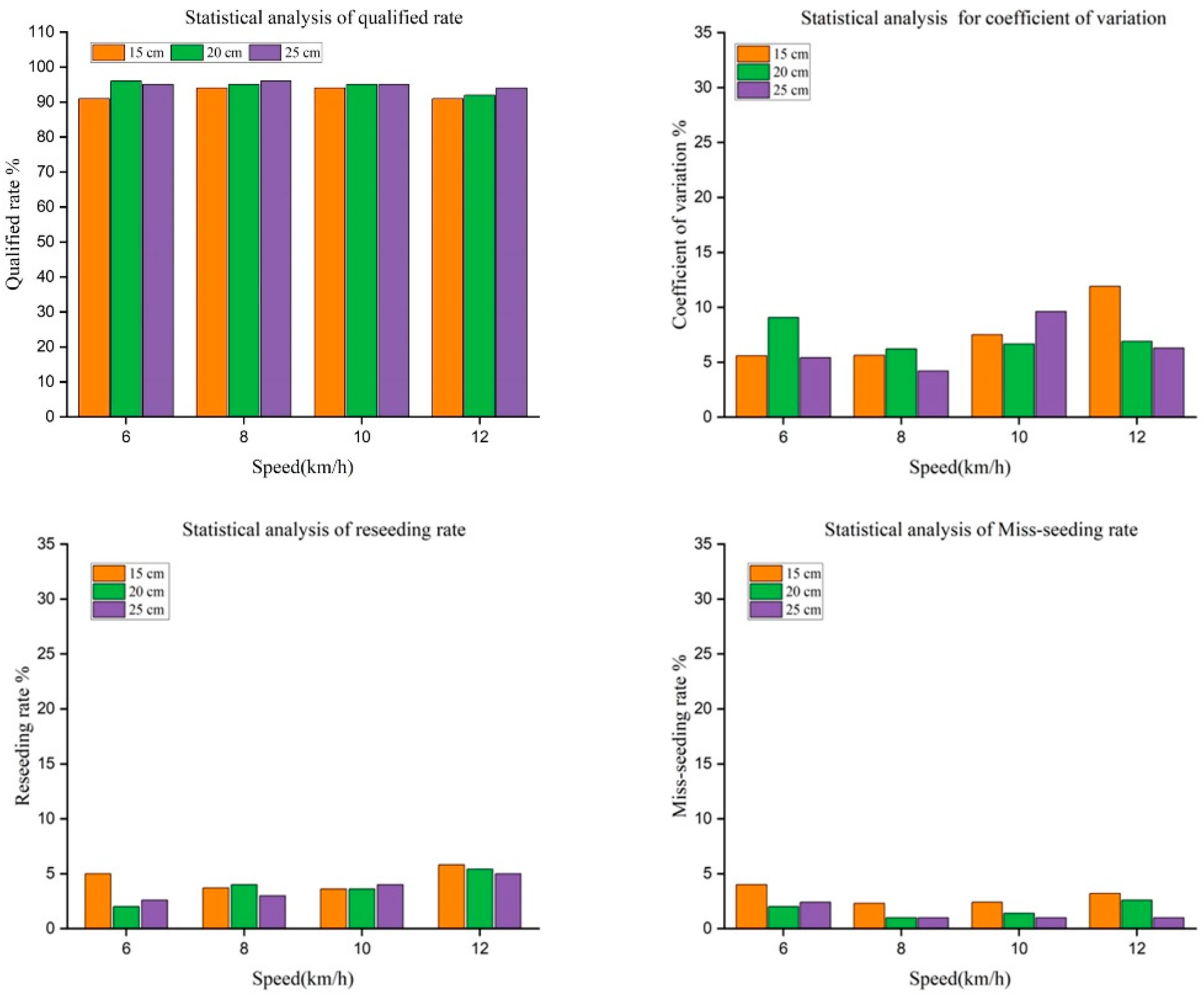
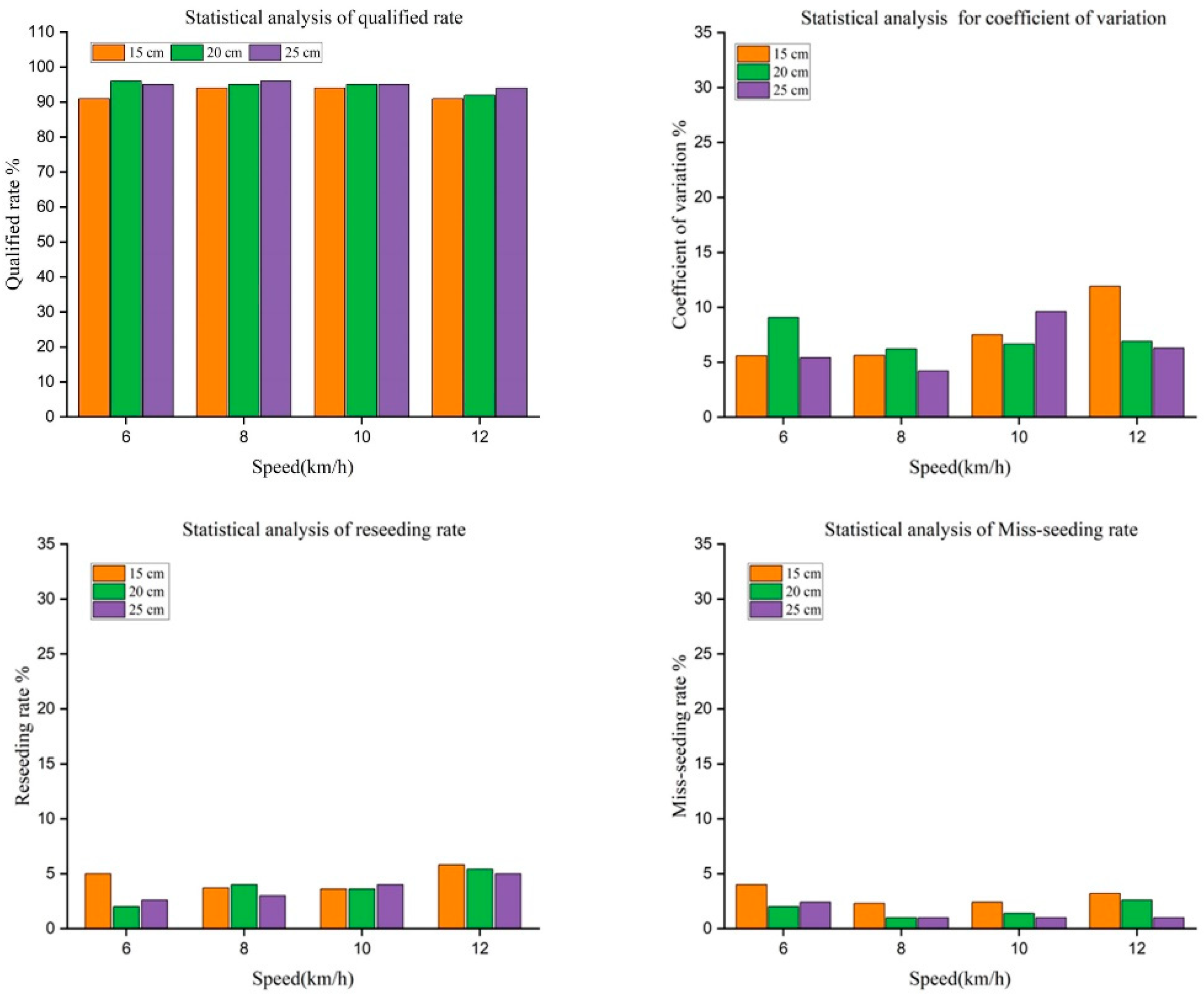
- Based on the indoor test results, the qualified rate was higher when the grain spacing was larger. It was also found that when the speed was 12 km/h, the qualified rate decreased compared with other speeds, and the missed rate increased. When the speed was 8 km/h and 10 km/h, the consistency of the indices was good, and the difference was significant when the speed was 6 km/h and 12 km/h. Overall, the qualified rate of sowing was more than 91%. At the same time, the correlation of the seeder index parameters was analyzed: there were strong correlations between QI, RI, MI, and V; QI decreased with increasing V; RI and MI increased with increasing V; and CV, RI, and MI decreased with increasing QI. Furthermore, the correlation between MI and QI was the strongest. The coefficient of determination was 0.983, and the level of visibility was far less than 0.01.
- (3)
- Based on field test results, the seeding performance results showed that the control system has good stability. When the grain spacing was set to 20 cm and the operating speed was 6~12 km/h, the qualified index was more than 90%, and the reseeding index was less than 1.93%. The variation in sowing performance between different monomers was small, and the seeding performance was good, which can provide a reference for the development and design of high-speed precision corn seeders.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, Y. Study on the Application Measures of Wide-narrow Row Maize Planting Technology. Agric. Develop. Equip. 2022, 2, 170–172. [Google Scholar]
- Yan, B.X.; Wu, G.W.; Fu, W.Q.; Gao, N.N.; Meng, Z.J.; Zhu, P. Influencing factors of corn implantation distribution for high-height planting based on EDEM. Trans. Chin. Soc. Agric. Mach. 2020, 51, 47–54. [Google Scholar]
- Wang, J.; Guo, J.; Huang, F. China Corn Supply and Demand Trend. Cere. Fe. Ind. 2021, 2, 1–4. [Google Scholar]
- Bai, H.C.; Yi, S.J.; Feng, S.H. Development status and prospect of maize precision seeding technology. China South. Agric. Mach. 2021, 15, 74–75. [Google Scholar]
- Zhao, X.G.; Chen, L.P.; Gao, Y.Y.; Yang, S.; Zhai, C.Y. Optimization method for accurate positioning seeding based on sowing decision. Int. J. Agric. Biol. Eng. 2021, 14, 151–158. [Google Scholar] [CrossRef]
- Yuan, Y.W.; Zhang, X.C.; Wu, C.C.; Zhang, J.N.; Zhou, L.M. Precision control system of no-till corn planter. Trans. CSAE 2011, 27, 222–226. [Google Scholar]
- Xie, C.J.; Zhang, D.X.; Yang, L.; Cui, T.; He, X.T.; Du, Z.H. Precision seeding parameter monitoring system based on laser sensor and wireless serial port communication. Comput. Electron. Agric. 2021, 190, 106429. [Google Scholar] [CrossRef]
- Yan, B.X.; Wu, G.W.; Xiao, Y.J.; Mei, H.B.; Meng, Z.J. Development and evaluation of a seed position mapping system. Comput. Electron. Agric. 2021, 190, 106446. [Google Scholar] [CrossRef]
- Liu, W.; Hu, J.P.; Zhao, X.S.; Yao, M.J.; Lakhiar, I.A. An adaptive roller speed control method based on monitoring value of real-time seed flow rate for flute-roller type seed-metering device. Sensors 2021, 21, 80. [Google Scholar] [CrossRef]
- Charan, P.N.; Kumar, S.P.; Kumar, K.D.; Indra, M.; Ankur, S.; Atish, S.; Nikul, K.; Sarkar, S.K.; Yash, M. A Novel Approach for Development and Evaluation of LiDAR Navigated Electronic Maize Seeding System Using Check Row Quality Index. Sensors 2021, 21, 5934. [Google Scholar]
- Speckmann, H.; Jahns, G. Development and application of an agricultural BUS for data transfer. Comput. Electron. Agric. 1999, 23, 219–237. [Google Scholar] [CrossRef]
- Yang, L.; He, X.T.; Cui, T.; Zhang, D.X.; Shi, S.; Zhang, R.; Wang, M.T. Development of mechatronic driving system for seed meters equipped on conventional precision corn planter. Int. J. Agric. Biol. Eng. 2015, 8, 1–9. [Google Scholar]
- Cay, A.; Kocabiyik, H.; May, S. Development of an electro-mechanic control system for seed-metering unit of single seed corn planters Part II: Field performance. Comput. Electron. Agric. 2018, 145, 11–17. [Google Scholar] [CrossRef]
- Cay, A.; Kocabiyik, H.; May, S. Development of an electro-mechanic control system for seed-metering unit of single seed corn planters Part I: Design and laboratory simulation. Comput. Electron. Agric. 2018, 144, 71–79. [Google Scholar] [CrossRef]
- Ding, Y.Q.; Yang, L.; Zhang, D.; Cui, T.; He, X.T.; Zhong, X.J. Control system of motor-driving maize precision planter based on GPS speed measurement. Trans. Chin. Soc. Agric. Mach. 2018, 49, 42–49. [Google Scholar]
- Li, Y.J.; Xiang, Y.; Liu, Y.; Lin, J.W.; Hu, Z.F.; Dai, X.F. Research on optimized algorithm of GPS velocity data of seeder based on Kalman filter. J. Chin. Agric. Mech. 2020, 41, 148–154. [Google Scholar]
- He, X.T.; Ding, Y.Q.; Zhang, D.X.; Li, Y.; Cui, T.; Zhong, X.J. Development of a variable-rate seeding control system for corn planters Part I: Design and laboratory experiment. Comput. Electron. Agric. 2019, 162, 318–327. [Google Scholar] [CrossRef]
- He, X.T.; Ding, Y.Q.; Zhang, D.X.; Li, Y.; Cui, T.; Zhong, X.J. Development of a variable-rate seeding control system for corn planters Part II: Field performance. Comput. Electron. Agric. 2019, 162, 309–317. [Google Scholar] [CrossRef]
- Ding, Y.Q.; Yang, L.; Zhang, D.X.; Cui, T.; Zhang, K.L.; Wang, M.T. Design of row-unit driver for maize variable rate planter. Trans. CSAE 2019, 35, 1–9. [Google Scholar]
- He, X.T.; Zhang, D.X.; Li, Y.; Cui, T.; Ding, Y.Q.; Zhong, X.J. Design and experiment of a GPS-based turn compensation system for improving the seeding uniformity of maize planter. Comput. Electron. Agric. 2021, 187, 106250. [Google Scholar] [CrossRef]
- Meng, W.Y.; Su, Y.L.; Wang, C.H.; Qin, L.; Wang, J.X.; Yan, X.S.; Pan, Y.Y. Design of intelligent seeding fault monitoring and alarm system for fine seeding machine. J. Phys. Conf. Ser. 2021, 2005, 012101. [Google Scholar] [CrossRef]
- Xie, C.J.; Zhang, D.X.; Yang, L.; Cui, T.; Yu, T.C.; Wang, D.C.; Xiao, T.P. Experimental analysis on the variation law of sensor monitoring accuracy under different seeding speed and seeding spacing. Comput. Electron. Agric. 2021, 189, 106369. [Google Scholar] [CrossRef]
- Backman, J.; Oksanen, T.; Visala, A. Applicability of the ISO 11783 network in a distributed combined guidance system for agricultural machines. Bio. Eng. 2013, 114, 306–317. [Google Scholar] [CrossRef]
- Suomi, P.; Oksanen, T. Automatic working depth control for seed drill using ISO 11783 remote control messages. Comput. Electron. Agric. 2015, 116, 30–35. [Google Scholar] [CrossRef]
- Paraforos, D.S.; Sharipov, G.M.; Griepentrog, H.W. ISO 11783-compatible industrial sensor and control systems and related research: A review. Comput. Electron. Agric. 2019, 163, 104863. [Google Scholar] [CrossRef]
- Lee, F.S.; Lin, C.I.; Chen, Z.Y.; Yang, R.X. Development of a control architecture for a parallel three-axis robotic arm mechanism using CANopen communication protocol. Concurr. Eng. 2021, 29, 197–207. [Google Scholar] [CrossRef]
- Awadhesh, K.; Nitesh, T.; Shekhar, Y.; Supriya, K. Comparative analysis and controller design for BLDC motor using PID and adaptive PID controller. Recent Adv. Electron. Electron. Eng. 2021, 14, 671–682. [Google Scholar]
- Qi, Z.; Shi, Q.; Zhang, H. Tuning of digital PID controllers using particle swarm optimization algorithm for a CAN-based DC motor subject to stochastic delays. IEEE Tran. Indust. Electron. 2020, 67, 5637–5646. [Google Scholar] [CrossRef]
- Tae, O.K.; Sang, S.H. Fuzzy PID control algorithm for improvement of BLDC motor speed response characteristics. J. Inst. Electr. Info. Eng. 2020, 57. [Google Scholar]
- Zhao, X.S.; Zhao, D.W.; Yan, Q.; Hu, Y.S.; Yu, H.L.; Yu, F.C. Design and testing study on electronical controlled precision seed-metering system based on fuzzy PID. J. Hebei Agric. Univ. 2021, 44, 120–127. [Google Scholar]
- Muhammad, R.D.; Faisal, F. Design of optimal PID controller for three phase induction motor based on ant colony optimization. Sinergi 2020, 24, 125. [Google Scholar] [CrossRef]
- Niharika, M.; Sameer, B.; Esh, N. Speed control of DC motor using PID controller FED H-bridge. Inter. J. Innova. Tech. Exp. Eng. 2020, 9. [Google Scholar] [CrossRef]
- Kuş, E. Field-scale evaluation of parameters affecting planter vibration in single seed planting. Measurement 2021, 184, 109959. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Number of Bits | Transport Types | Dictionary Index | |
|---|---|---|---|---|
| Indices | Subindices | |||
| Operating speed | 32 | PDO | 2000 | 00 |
| Operating area | 32 | PDO | 2003 | 00 |
| Motor status | 8 | PDO | 2004 | 00 |
| Seeding status | 8 | PDO | 2005 | 00 |
| Seeding number | 32 | PDO | 2006 | 00 |
| Miss-seeding rate | 32 | PDO | 2007 | 00 |
| Replay rate | 32 | PDO | 2008 | 00 |
| Seed spacing | 16 | SDO | 2001 | 00 |
| Motor control | 8 | SDO | 2009 | 00 |
| Working width | 16 | SDO | 200A | 00 |
| … | … | … | … | … |
| Index | Indicators | ||
|---|---|---|---|
| Seed Spacing ≤10 cm | Seed Spacing >10 cm~20 cm | Seed Spacing >20 cm~30 cm | |
| Qualified index | ≥60.0 | ≥75.0 | ≥80.0 |
| Reseeding index | ≤30.0 | ≤20.0 | ≤15.0 |
| Missing index | ≤15.0 | ≤10.0 | ≤8.0 |
| Coefficient of variation | ≤40.0 | ≤35.0 | ≤30.0 |
| Site | Speed (km/h) | Monitoring Value | Actual Value | ||||
|---|---|---|---|---|---|---|---|
| Am | Bm | Cm | Aa | Ba | Ca | ||
| Laboratory | 6 | 245 | 304 | 258 | 245 | 305 | 258 |
| 8 | 275 | 236 | 459 | 275 | 236 | 460 | |
| 10 | 236 | 389 | 321 | 236 | 389 | 321 | |
| 12 | 335 | 286 | 462 | 335 | 287 | 462 | |
| Field | 6 | 365 | 428 | 303 | 365 | 428 | 303 |
| 8 | 274 | 354 | 482 | 275 | 355 | 482 | |
| 10 | 382 | 298 | 407 | 382 | 299 | 408 | |
| 12 | 473 | 387 | 496 | 473 | 385 | 496 | |
| Items | V/(km/h) | CV/% | QI/% | RI/% | MI/% | |
|---|---|---|---|---|---|---|
| V/(km/h) | 1.000 a | 0.000 | 0.527 | −0.791 * | 0.738 * | 0.843 ** |
| \ b | 1.000 | 0.145 | 0.011 | 0.023 | 0.004 | |
| /mm | 0.000 | 1.000 | −0.369 | 0.527 | −0.264 | −0.474 |
| 1.000 | \ | 0.329 | 0.145 | 0.493 | 0.197 | |
| CV/% | 0.527 | −0.369 | 1.000 | −0.733 * | 0.717 * | 0.633 |
| 0.145 | 0.329 | \ | 0.025 | 0.030 | 0.067 | |
| QI/% | −0.791 * | 0.527 | −0.733 * | 1.000 | −0.867 ** | −0.983 ** |
| 0.011 | 0.145 | 0.025 | \ | 0.002 | 0.000 | |
| RI% | 0.738 * | −0.264 | 0.717 * | −0.867 ** | 1.000 | 0.833 ** |
| 0.023 | 0.493 | 0.030 | 0.002 | \ | 0.005 | |
| MI/% | 0.843 ** | −0.474 | 0.633 | −0.983 ** | 0.833 ** | 1.000 |
| 0.004 | 0.197 | 0.067 | 0.000 | 0.005 | \ |
| Items | V = 6 (km/h) | V = 8 (km/h) | V = 10 (km/h) | V = 12 (km/h) | ||||
|---|---|---|---|---|---|---|---|---|
| No. 2 | No. 7 | No. 2 | No. 7 | No. 2 | No. 7 | No. 2 | No. 7 | |
| Average distance (cm) | 19.38 | 19.24 | 19.10 | 19.40 | 20.30 | 19.18 | 21.50 | 20.31 |
| QI/% | 93.17 | 93.40 | 94.14 | 94.53 | 91.48 | 91.94 | 90.35 | 90.01 |
| RI/% | 1.38 | 1.86 | 1.72 | 1.14 | 1.06 | 0.80 | 1.02 | 1.93 |
| MI/% | 5.45 | 4.74 | 4.14 | 4.33 | 7.46 | 7.26 | 8.63 | 8.06 |
| Standard deviation | 5.32 | 6.73 | 4.59 | 5.46 | 9.65 | 8.41 | 10.01 | 9.35 |
| Items | ||||||
|---|---|---|---|---|---|---|
| No. 2 | No. 7 | No. 2 | No. 7 | No. 2 | No. 7 | |
| Average distance (cm) | 14.43 | 14.15 | 19.93 | 19.28 | 23.10 | 23.40 |
| QI/% | 91.79 | 92.25 | 93.19 | 93.98 | 94.12 | 94.71 |
| RI/% | 2.65 | 3.01 | 2.12 | 1.89 | 1.72 | 1.14 |
| MI/% | 5.56 | 4.74 | 4.69 | 4.13 | 4.16 | 4.15 |
| Standard deviation | 7.61 | 8.26 | 6.32 | 5.78 | 4.59 | 5.46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Zhang, H.; Pan, F.; Du, M.; Ji, C. Control System of a Motor-Driven Precision No-Tillage Maize Planter Based on the CANopen Protocol. Agriculture 2022, 12, 932. https://doi.org/10.3390/agriculture12070932
Chen J, Zhang H, Pan F, Du M, Ji C. Control System of a Motor-Driven Precision No-Tillage Maize Planter Based on the CANopen Protocol. Agriculture. 2022; 12(7):932. https://doi.org/10.3390/agriculture12070932
Chicago/Turabian StyleChen, Jincheng, Hui Zhang, Feng Pan, Mujun Du, and Chao Ji. 2022. "Control System of a Motor-Driven Precision No-Tillage Maize Planter Based on the CANopen Protocol" Agriculture 12, no. 7: 932. https://doi.org/10.3390/agriculture12070932
APA StyleChen, J., Zhang, H., Pan, F., Du, M., & Ji, C. (2022). Control System of a Motor-Driven Precision No-Tillage Maize Planter Based on the CANopen Protocol. Agriculture, 12(7), 932. https://doi.org/10.3390/agriculture12070932