
Design and Experiment for Inter-Vehicle Communication Based on Dead-Reckoning and Delay Compensation in a Cooperative Harvester and Transport System

Abstract
:1. Introduction
1.1. Literature Review
1.2. Objectives of the Research
2. Materials and Methods
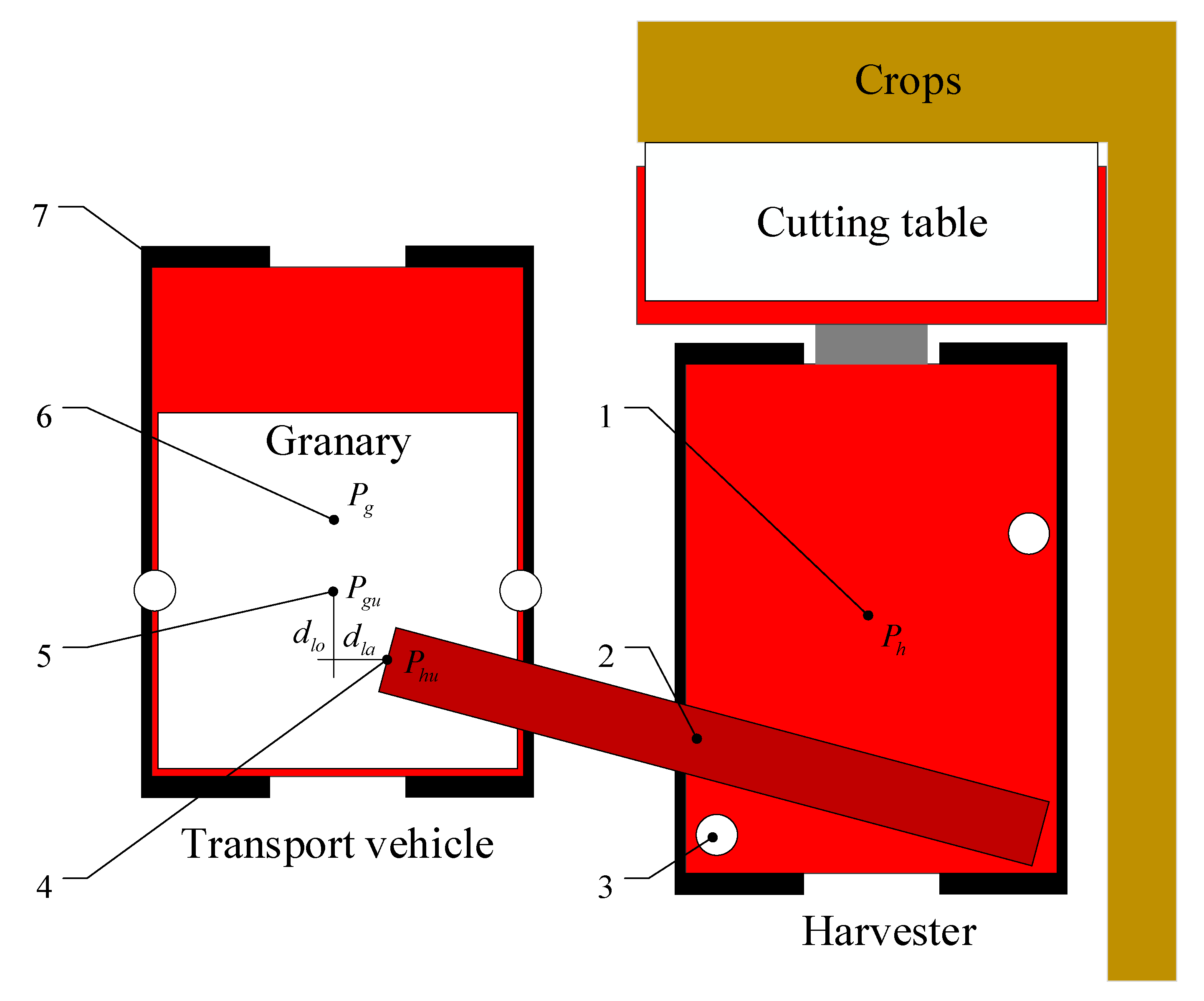
2.1. Communication Demand
2.2. Wireless Communication Design
2.2.1. Data Transfer Unit (DTU)
2.2.2. Communication Content and Protocol
2.3. Kalman Filter Based on Dead-Reckoning and Communication Data after Delay Compensation (KFDCC)
2.3.1. Basic Kalman Filter Design
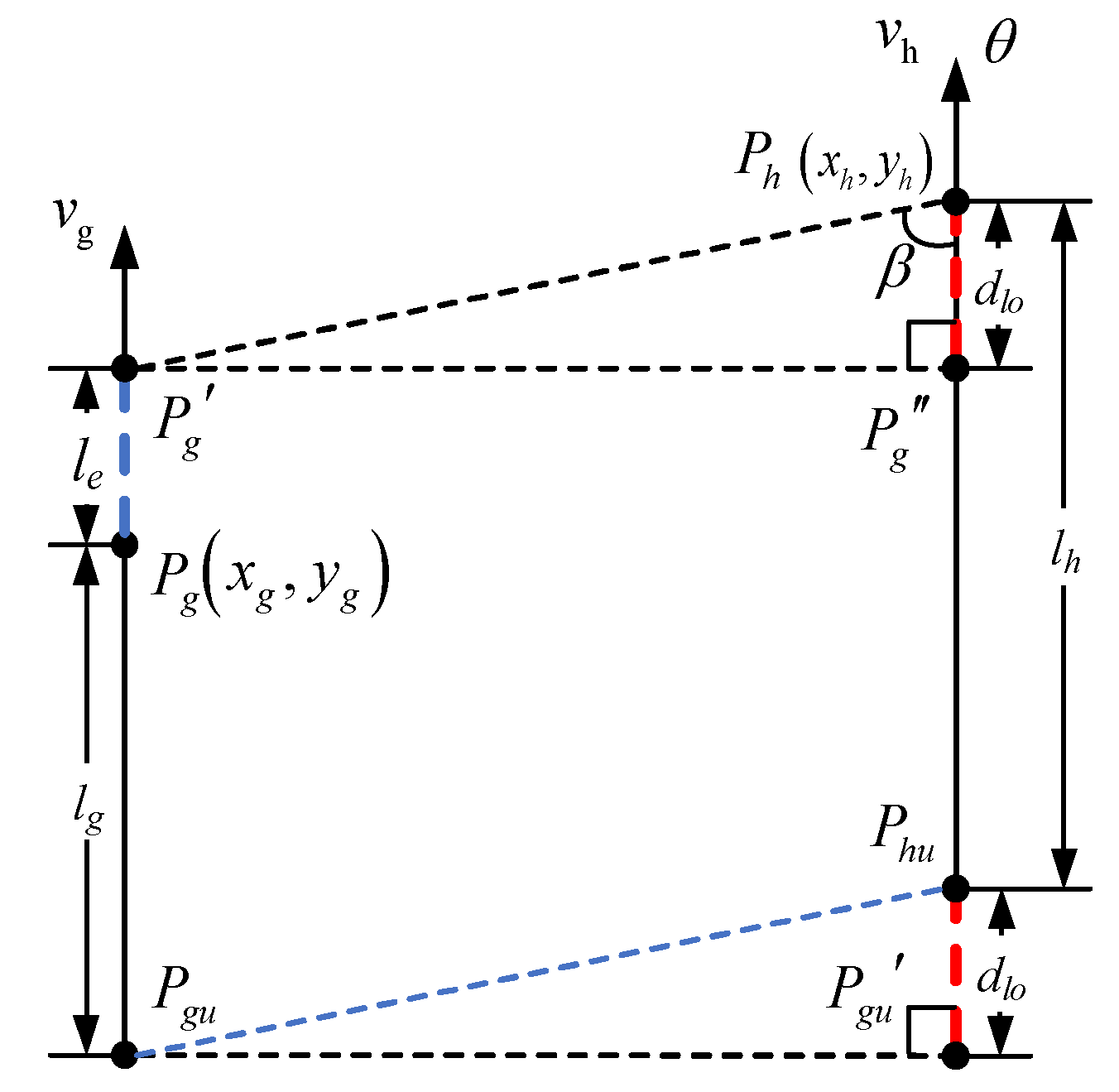
2.3.2. Delay Compensation of the Observation
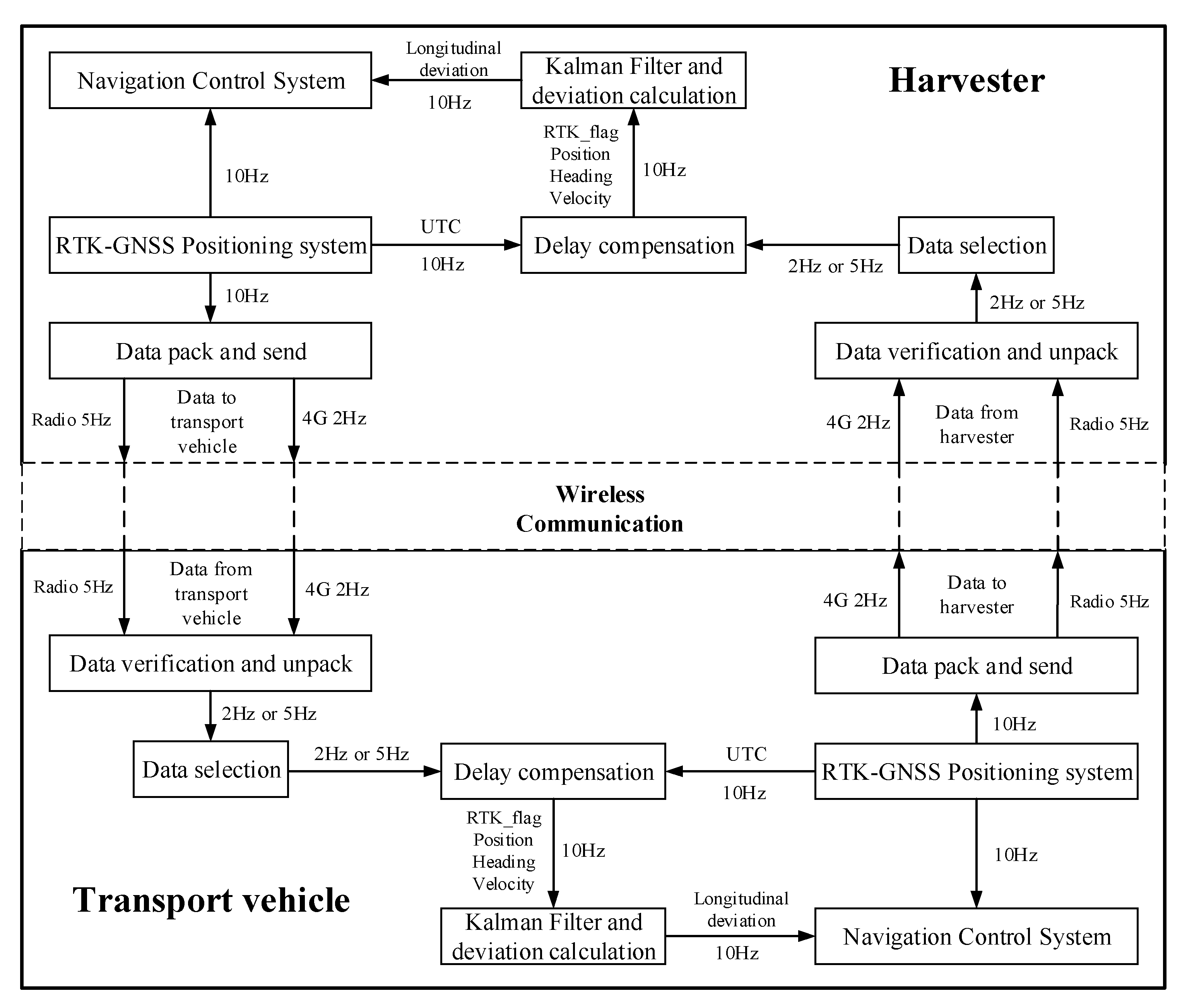
2.3.3. Information Processing Method
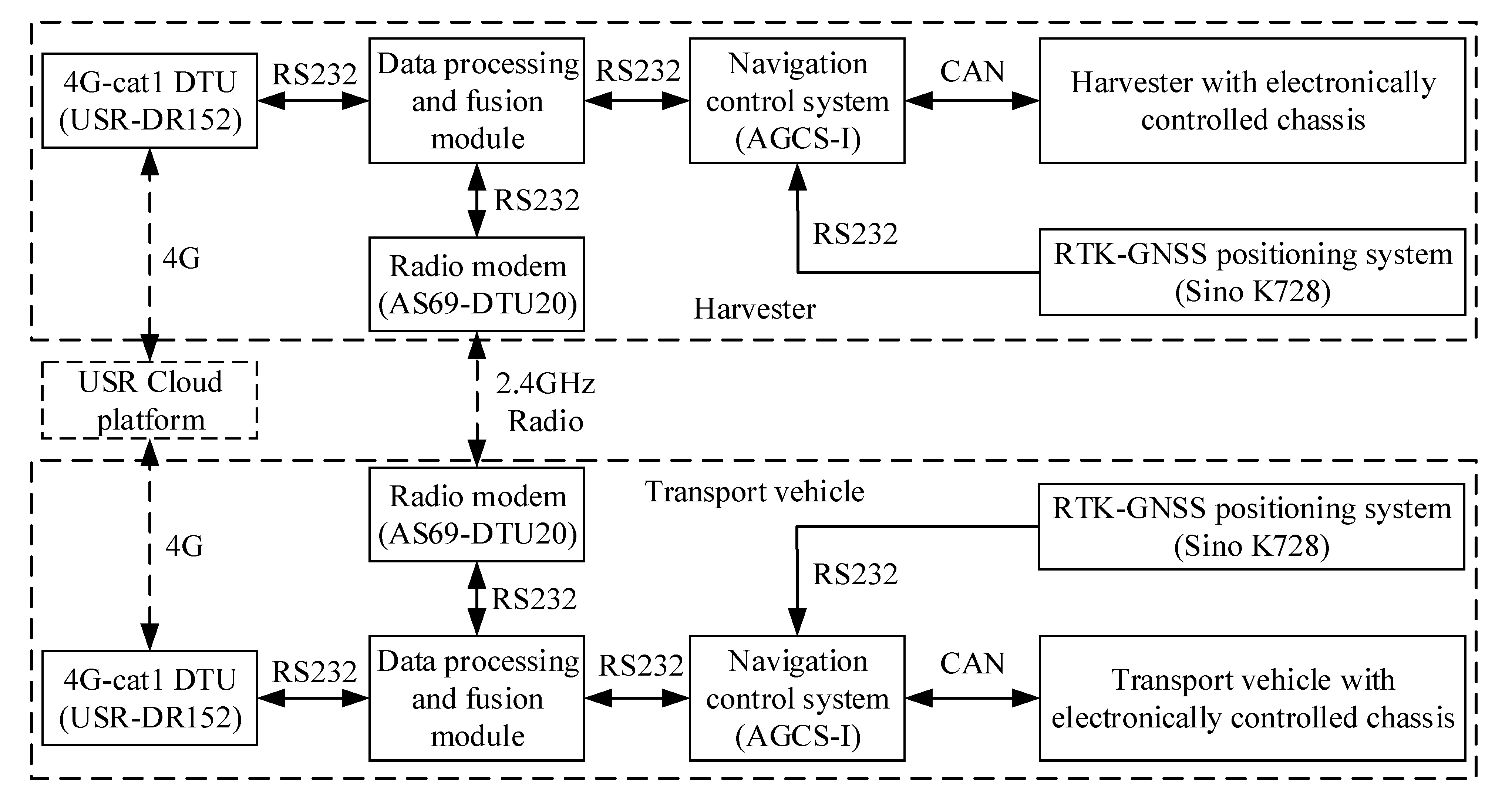
2.4. Overall Design of the Test System
3. Results and Discussion
3.1. Algorithm Accuracy Evaluation and Validation
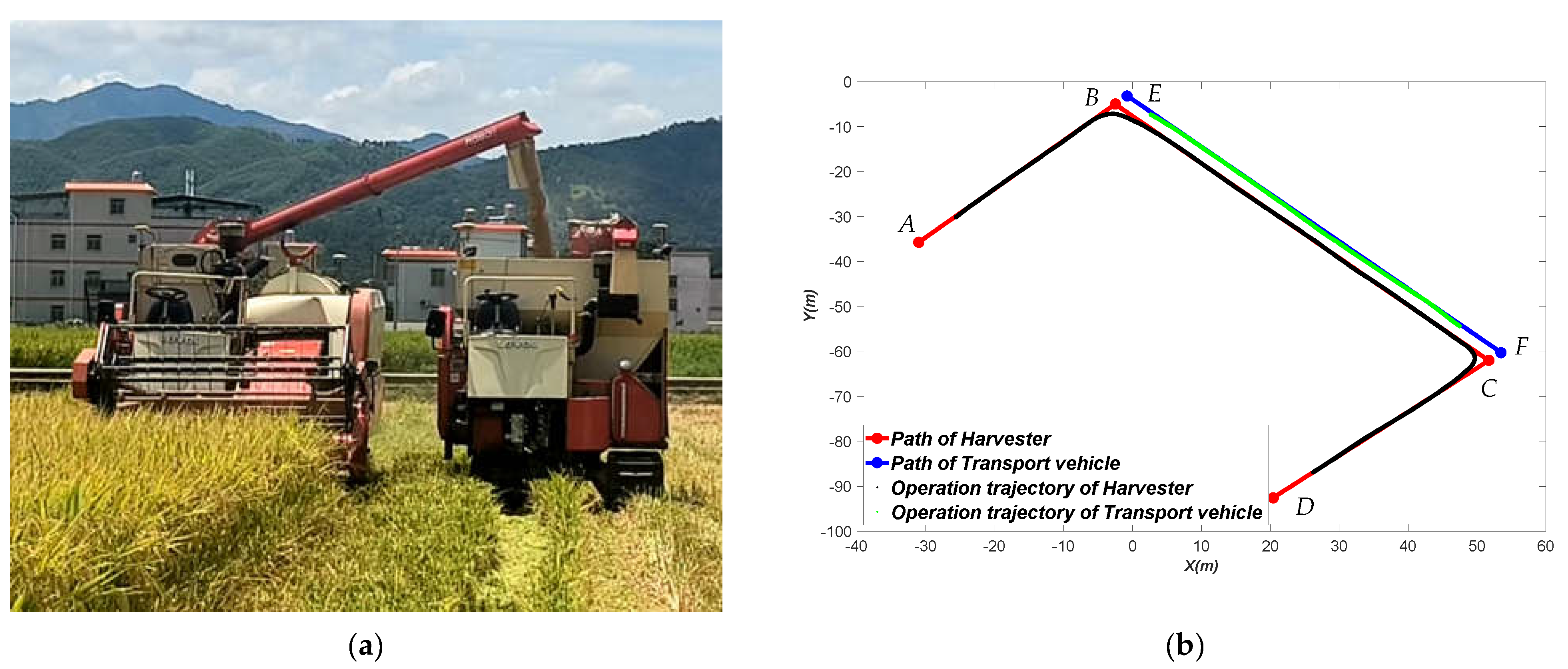
3.2. Field Harvesting Application
4. Conclusions and Prospects
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qi, Y.J.; Tang, C. Effect of labor migration on cultivated land planting structure in rural China. Trans. Chin. Soc. Agric. Eng. 2017, 33, 233–240. [Google Scholar]
- Li, D.L.; Li, Z. System Analysis and Development Prospect of Unmanned Farming. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–12. [Google Scholar]
- Luo, X.W.; Liao, J.; Hu, L.; Zhou, Z.Y.; Zhang, Z.G.; Zang, Y.; Wang, P.; He, J. Research progress of intelligent agricultural machinery and practice of unmanned farm in China. J. South China Agric. Univ. 2021, 42, 8–17. [Google Scholar]
- Peng, X.R. Research on Multi-Vehicle Cooperation based on Mini Intelligent Vehicles. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2010. [Google Scholar]
- Alshabtat, A.I.; Dong, L. Low Latency Routing Algorithm for Unmanned Aerial Vehicles Ad-Hoc Networks. Int. J. Electr. Comput. Eng. 2011, 5, 989–995. [Google Scholar]
- Shen, Z.Y.; Zheng, Q.W.; Wang, C. Multi-smart car control system based on wireless communication network. J. Southeast Univ. (Nat. Sci. Ed.) 2013, 43, 18–21. [Google Scholar]
- Zhang, K.B.W.; Deng, C.; Ou, Y.L. Design of Multi-vehicle Following Control System based on Arduino. Int. J. Comput. Appl. 2016, 140, 5–8. [Google Scholar] [CrossRef]
- Rosati, S.; Kruzelecki, K.; Heitz, G.; Floreano, D.; Rimoldi, B. Dynamic Routing for Flying Ad Hoc Networks. IEEE Trans. Veh. Technol. 2016, 65, 1690–1700. [Google Scholar] [CrossRef] [Green Version]
- Yajima, H.; Takami, K. Inter-Vehicle Communication Protocol Design for a Yielding Decision at an Unsignalized Intersection and Evaluation of the Protocol Using Radio Control Cars Equipped with Raspberry Pi. Computers 2019, 8, 16. [Google Scholar] [CrossRef] [Green Version]
- Nakazawa, T.; Tang, S.; Obana, S. CCN-Based Inter-Vehicle Communication for Efficient Collection of Road and Traffic Information. Electronics 2020, 9, 112. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Takeda, J.; Xie, B. Tractor platooning system on sloping terrain at low speed. Trans. ASABE 2009, 52, 1385–1393. [Google Scholar] [CrossRef]
- Zhang, X.; Geimer, M.; Noack, P.O.; Grandl, L. A semi-autonomous tractor in an intelligent master–slave vehicle system. Intell. Serv. Robot. 2010, 3, 263–269. [Google Scholar] [CrossRef]
- Wang, Z.Q. Design and realization on autonomous following control system of agricultural vehicles. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2014. [Google Scholar]
- Noguchi, N.; Will, J.; Reid, J.; Zhang, Q. Development of a master–slave robot system for farm operations. Comput. Electron. Agric. 2004, 44, 1–19. [Google Scholar] [CrossRef]
- Zhang, C.; Noguchi, N.; Yang, L. Leader–follower system using two robot tractors to improve work efficiency. Comput. Electron. Agric. 2016, 121, 269–281. [Google Scholar] [CrossRef]
- Bai, X.P.; Wang, Z.; Hu, J.T.; Gao, L.; Xiong, F. Harvester Group Corporative Navigation Method Based on Leader-Follower Structure. Trans. Chin. Soc. Agric. Mach. 2017, 48, 14–21. [Google Scholar]
- Li, S.; Cao, R.; Wei, S.; Ji, Y.; Zhang, M.; Li, H. Development of Multi-vehicle Cooperative Navigation Communication System Based on TD-LTE. Trans. Chin. Soc. Agric. Mach. 2017, 48, 45–51+65. [Google Scholar]
- Li, S.; Xu, H.; Ji, Y.; Cao, R.; Zhang, M.; Li, H. Development of a following agricultural machinery automatic navigation system. Comput. Electron. Agric. 2019, 158, 335–344. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, Z.; Luo, X.; He, J.; Hu, L.; Yue, B. Position-velocity coupling control method and experiments for longitudinal relative position of harvester and transport vehicle. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–11. [Google Scholar]
- Chen, J.; Fu, S.; Guan, Z.; Zhu, F.; Zhu, L.; Xia, H.; Xing, L. Communication method of combine harvester group based on Lora Technology. Trans. Chin. Soc. Agric. Eng. 2022, 38, 81–89. [Google Scholar]
- Li, D.L.; Yang, H. State-of-the-art Review for Internet of Things in Agriculture. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–20. [Google Scholar]
- Zhang, M.; Ji, Y.H.; Li, S.C.; Cao, R.Y.; Xu, H.Z.; Zhang, Z.Q. lResearch Progress of Agricultural Machinery Navigation Technology. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar]
- Akhlaghi, S.; Zhou, N.; Huang, Z. In Adaptive Adjustment of Noise Covariance in Kalman Filter for Dynamic State Estimation. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Distance | Characteristics | |
|---|---|---|---|
| Short-range | ZigBee | 30–50 m | Low speed, node, low power consumption |
| Wi-Fi | <100 m | High speed, common communication quality | |
| Bluetooth | <10 m | Short distance, slow reconnection | |
| Ultra-Wide-band | <10 m | Short distance, high cost | |
| Long-distance | Radio modem | 1–25 km | Point to point, limited channel, real-time performance |
| Cellular mobile communication (2G/3G/4G/5G) | 36 km | High speed, great potential, easy to use, wide range, operator dependent | |
| LoRa | 15 km | Low speed, low power consumption, relay station | |
| NB-IoT | 20 km | Inadequate adaptability, operator dependent | |
| Items | Parameters | Descriptions |
|---|---|---|
| 4G-cat1 DTU (USR-DR152) | Power Supply | 5 V~16 V DC |
| Network | China Mobile/China Unicom/China Telecom LTE Cat-1 | |
| Specifications | TDD-LTE, FDD-LTE | |
| Speed | 10 Mbps downstream,5 Mbps upstream | |
| UART | RS232 | |
| Baud | 1200~230,400 bps | |
| 2.4 GHz Radio modem (AS69-DTU20) | Power Supply | 8 V~28 V DC |
| Frequency | 2.405~2.525 GHz | |
| UART | RS232/RS485 | |
| Baud | 1200 bps~115,200 bps | |
| Feature | Full Duplex | |
| ALIENTEK STM32F407ZGT6 Minimal System Board | CPU | STM32F407ZGT6, LQFP144 |
| FLASH | 1024 K | |
| SRAM | 192 K + 8 M Bit(external expansion) | |
| Serial Port | 4 *USART, 2 *UART |
| Items | Parameters | Values |
|---|---|---|
| Harvester (LOVOL RG60V4G-036) | Overall dimensions/(mm × mm × mm) | 5930 × 2500 × 2945 |
| Overall weight/kg | 3900 | |
| Matching power/kW | 88 | |
| Cutting width/mm | 2100 | |
| Feed quantity/(kg/s) | 6 | |
| Granary volume/m3 | 1.3 | |
| Transport vehicle (LOVOL RG60V4G-037) | Overall dimensions/(mm × mm × mm) | 3086 × 2080 × 2738 |
| Overall weight/kg | 2500 | |
| Matching power/kW | 88 | |
| Granary volume/m3 | 2.5 | |
| Forward speed range/(km/h) | 1.08–7.2 |
| Wireless Communication | Test No. | MAE 1 of E (m) | MSE 2 of E (m) | PLR 3 of KFDCC Output | MAE of Era or E4g (m) | MSE of Era or E4g (m) | PLR of Wireless Communication |
|---|---|---|---|---|---|---|---|
| Radio modem (AS69-DTU20) | 1 | 0.03881 | 0.00385 | 0% | 0.39131 | 0.03896 | 2.79% |
| 2 | 0.03882 | 0.00387 | 0% | 0.14847 | 0.03314 | 0.31% | |
| 3 | 0.03927 | 0.00451 | 0% | 0.17663 | 0.03283 | 0.53% | |
| 4 | 0.03658 | 0.00407 | 0% | 0.16361 | 0.03385 | 0.41% | |
| 5 | 0.03569 | 0.00331 | 0% | 0.18674 | 0.03568 | 0.57% | |
| AVG 4 | 0.03783 | 0.00392 | 0% | 0.21335 | 0.03489 | 0.92% | |
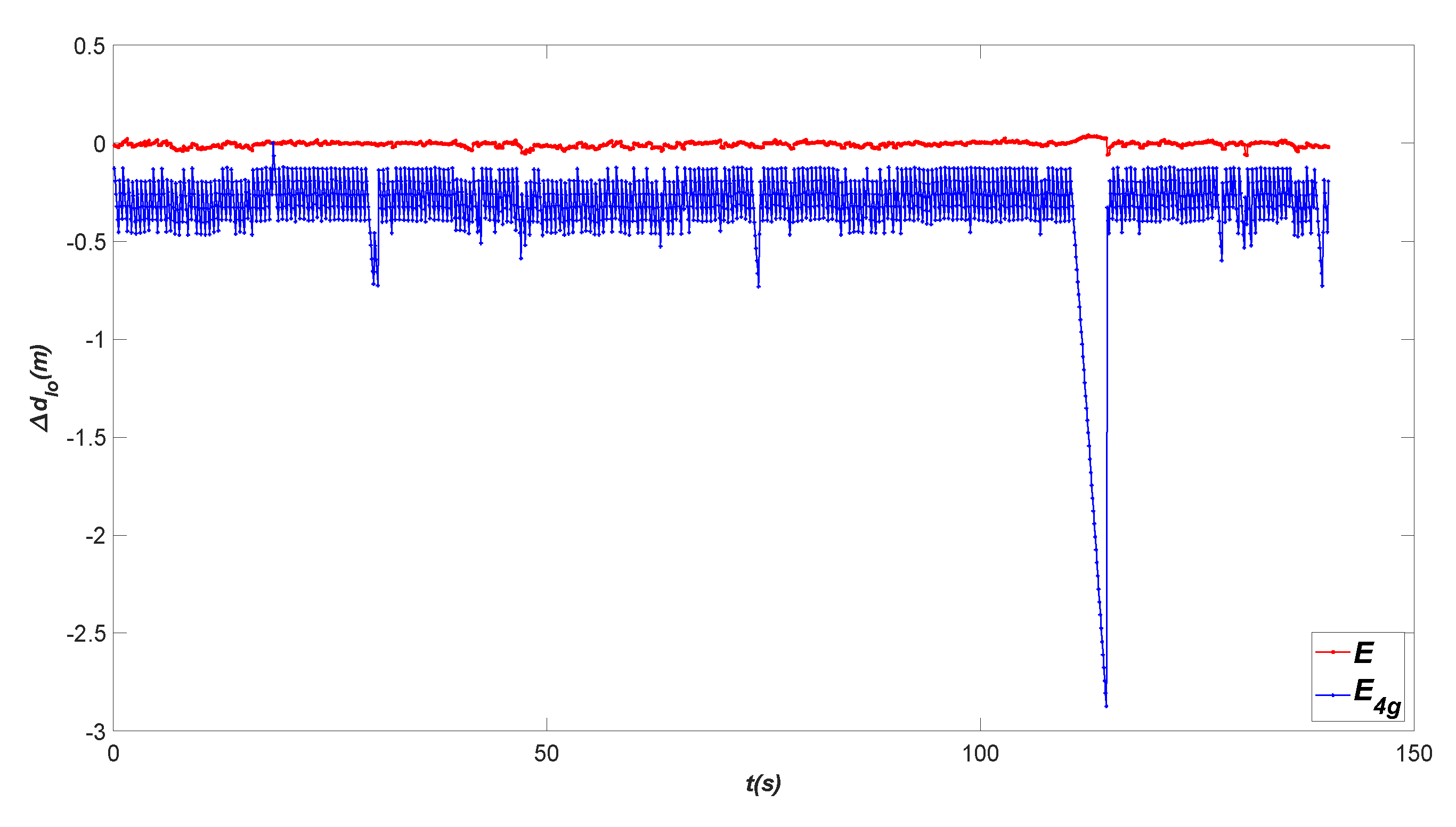
| 4G-cat1 DTU (USR-DR152) | 1 | 0.06922 | 0.01348 | 0% | 0.58896 | 0.10705 | 3.33% |
| 2 | 0.07002 | 0.01419 | 0% | 0.84927 | 0.11838 | 4.01% | |
| 3 | 0.07238 | 0.01293 | 0% | 2.87376 | 0.27263 | 4.33% | |
| 4 | 0.06199 | 0.00882 | 0% | 0.58719 | 0.09550 | 2.61% | |
| 5 | 0.09545 | 0.01643 | 0% | 0.58896 | 0.10690 | 3.06% | |
| AVG | 0.07381 | 0.01317 | 0% | 1.09763 | 0.14010 | 3.47% |
| Test | Test No. | MAE 1 of E (m) | MSE 2 of E (m) | PLR 3 of KFDCC Output | MAE of EFLD (m) | MSE of EFLD (m) | PLR of Wireless Communication |
|---|---|---|---|---|---|---|---|
| cooperative harvesting and unloading | 1 | 0.04154 | 0.00547 | 0% | 0.47817 | 0.04151 | 2.39% |
| 2 | 0.04976 | 0.00594 | 0% | 0.36893 | 0.03287 | 1.06% | |
| 3 | 0.05459 | 0.00485 | 0% | 0.29233 | 0.03343 | 0.93% | |
| AVG 4 | 0.04863 | 0.00542 | 0% | 0.37981 | 0.03594 | 1.46% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, F.; Zhang, W.; Luo, X.; Zhang, Z.; Wang, M.; Li, H.; Peng, M.; Hu, L. Design and Experiment for Inter-Vehicle Communication Based on Dead-Reckoning and Delay Compensation in a Cooperative Harvester and Transport System. Agriculture 2022, 12, 2052. https://doi.org/10.3390/agriculture12122052
Ding F, Zhang W, Luo X, Zhang Z, Wang M, Li H, Peng M, Hu L. Design and Experiment for Inter-Vehicle Communication Based on Dead-Reckoning and Delay Compensation in a Cooperative Harvester and Transport System. Agriculture. 2022; 12(12):2052. https://doi.org/10.3390/agriculture12122052
Chicago/Turabian StyleDing, Fan, Wenyu Zhang, Xiwen Luo, Zhigang Zhang, Mingchang Wang, Hongkai Li, Mingda Peng, and Liwen Hu. 2022. "Design and Experiment for Inter-Vehicle Communication Based on Dead-Reckoning and Delay Compensation in a Cooperative Harvester and Transport System" Agriculture 12, no. 12: 2052. https://doi.org/10.3390/agriculture12122052
APA StyleDing, F., Zhang, W., Luo, X., Zhang, Z., Wang, M., Li, H., Peng, M., & Hu, L. (2022). Design and Experiment for Inter-Vehicle Communication Based on Dead-Reckoning and Delay Compensation in a Cooperative Harvester and Transport System. Agriculture, 12(12), 2052. https://doi.org/10.3390/agriculture12122052