
Sugar Beet Damage Detection during Harvesting Using Different Convolutional Neural Network Models


Abstract
:1. Introduction
2. Materials and Methods
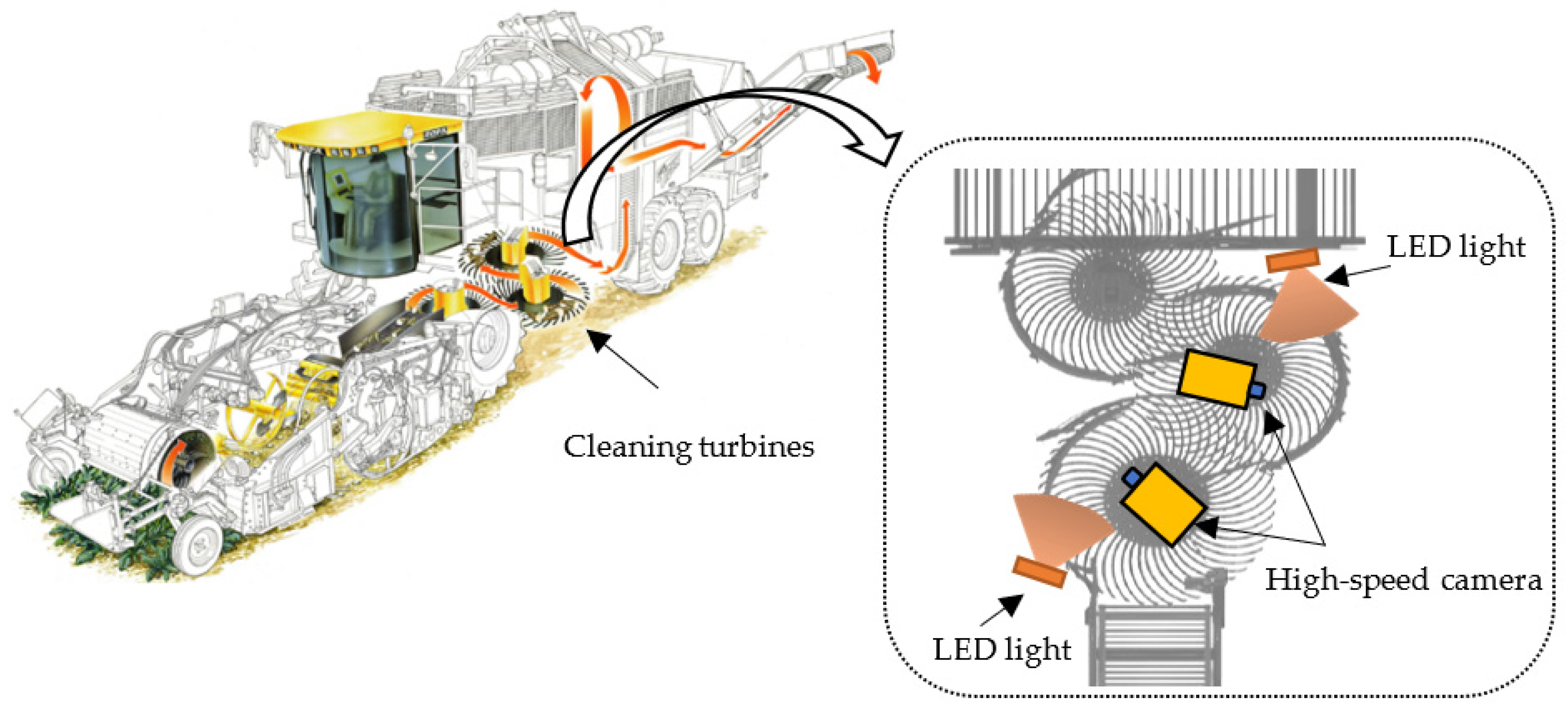
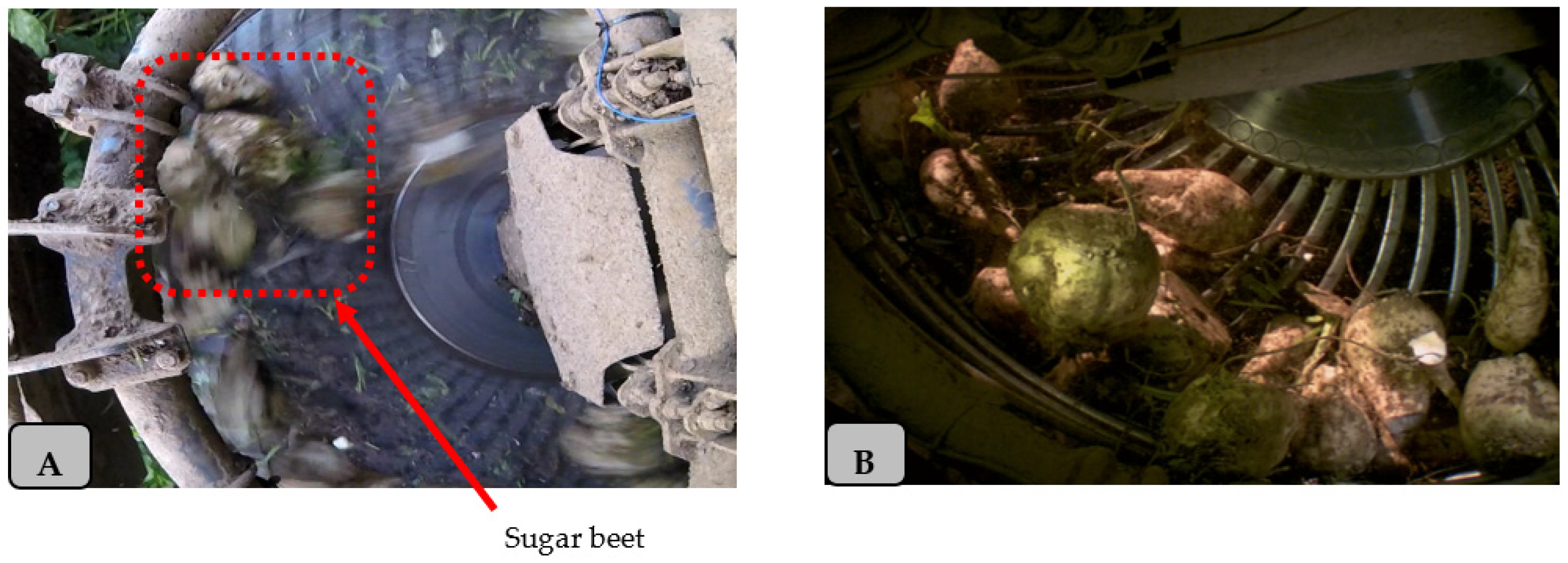
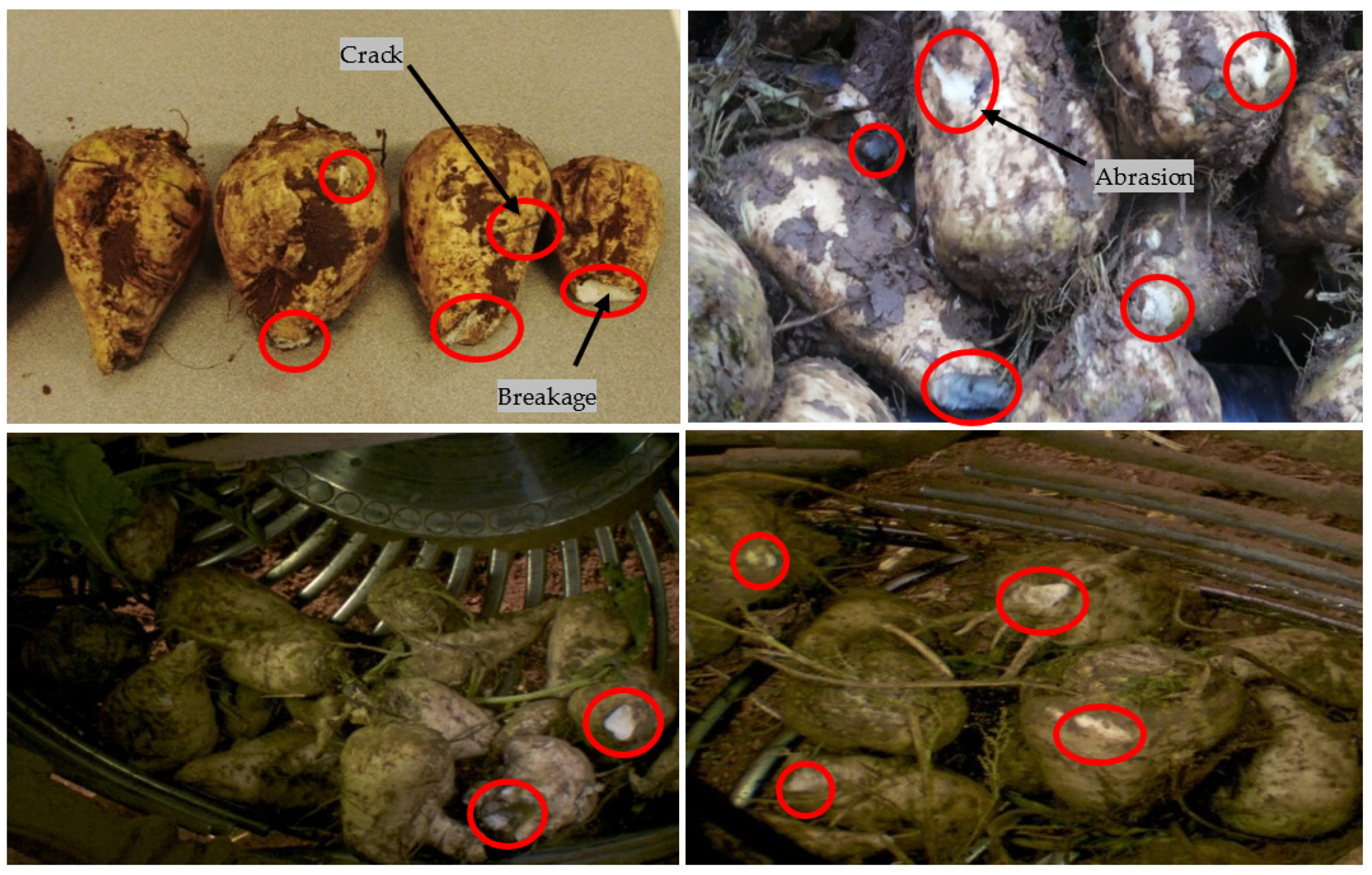
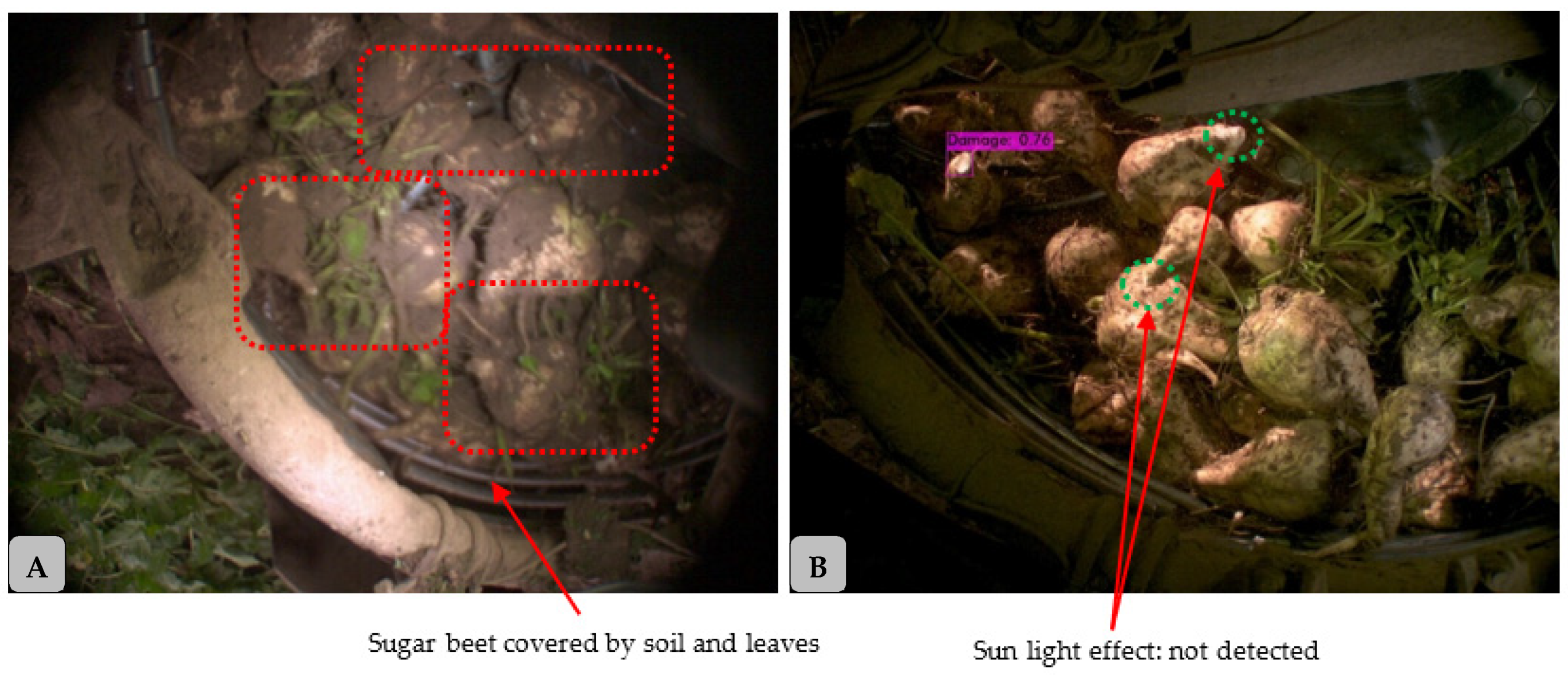
2.1. Imaging and Data Recording
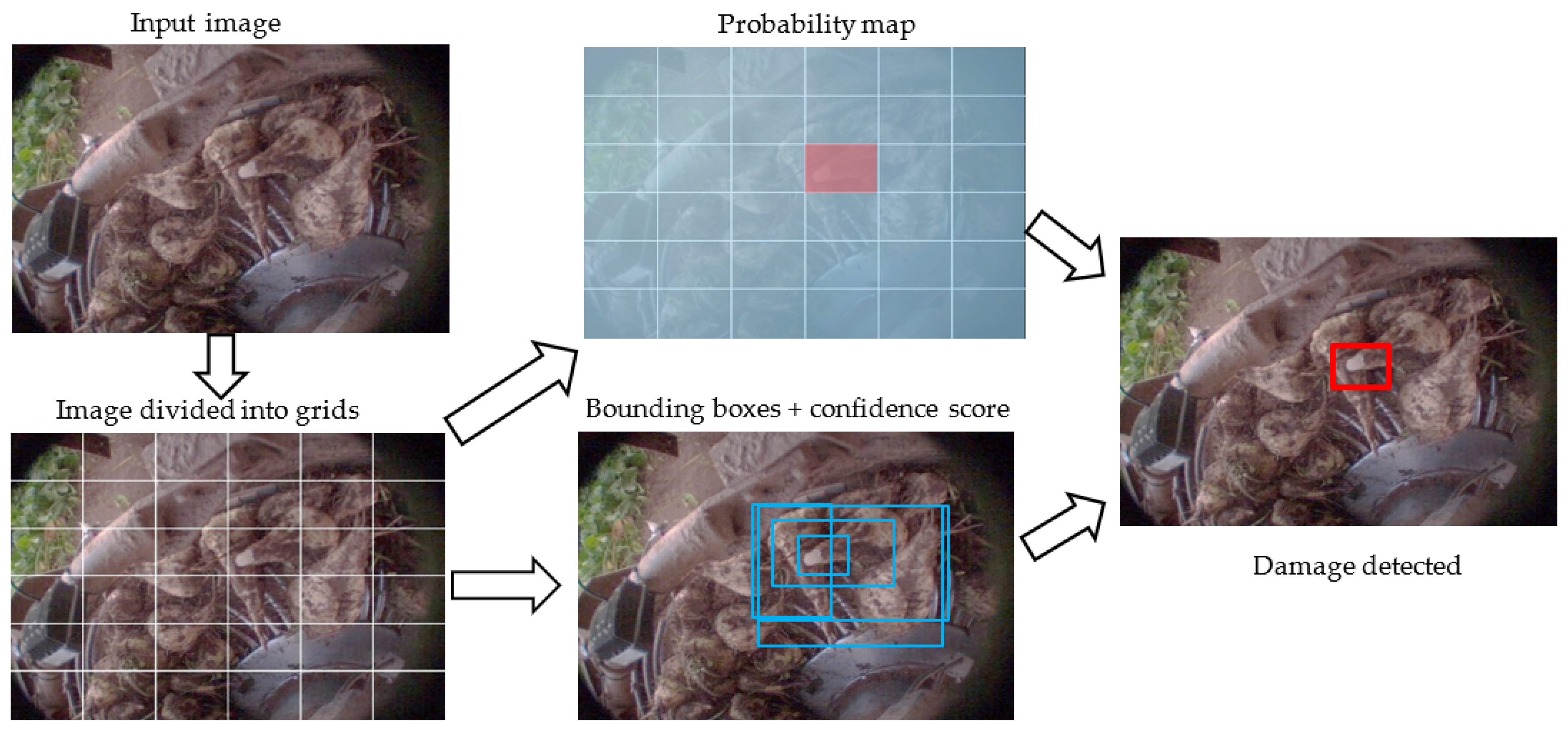
2.2. CNN Methodologies
2.2.1. YOLO v4
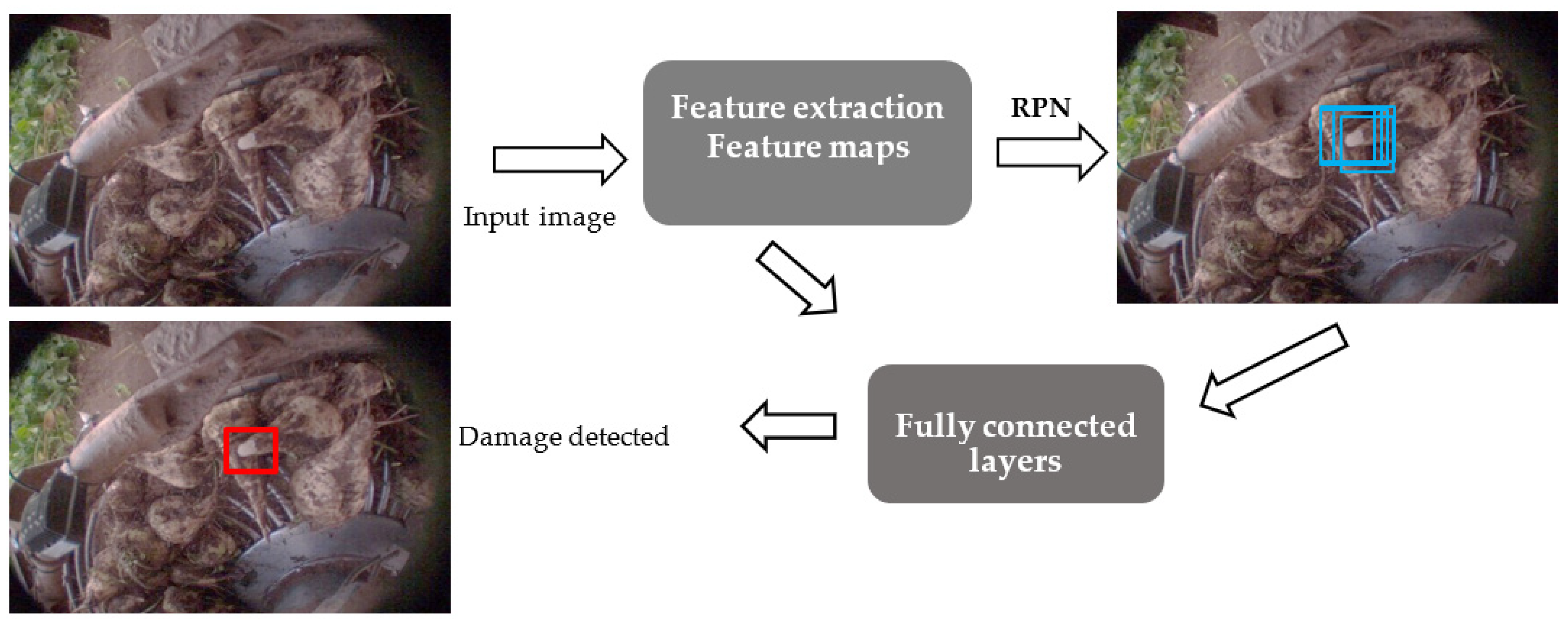
2.2.2. Faster R-CNN
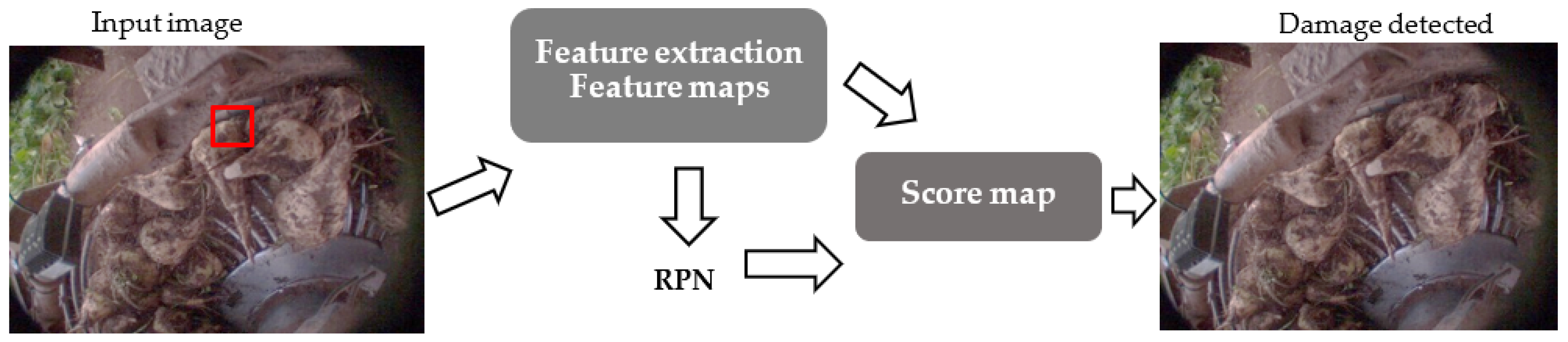
2.2.3. R-FCN
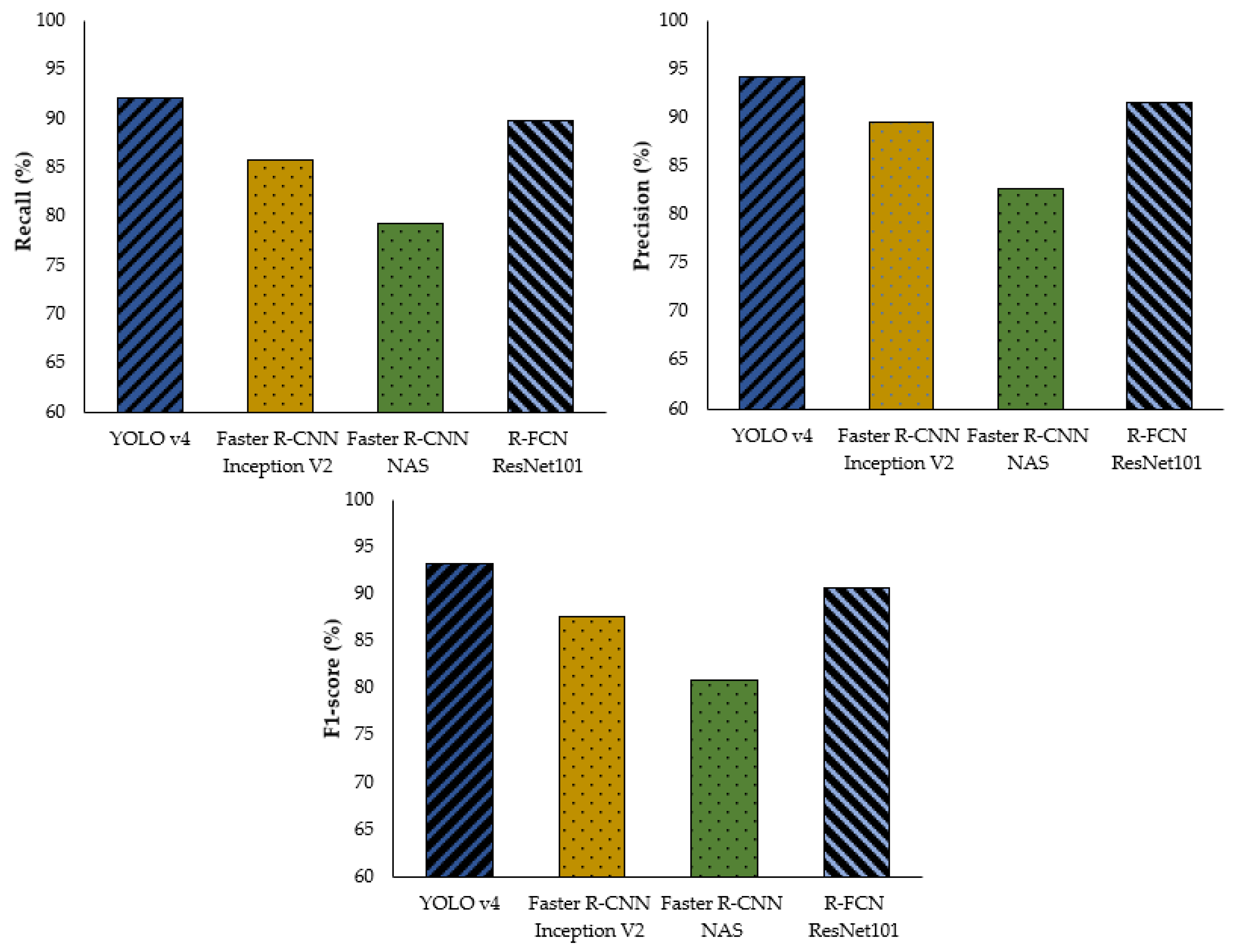
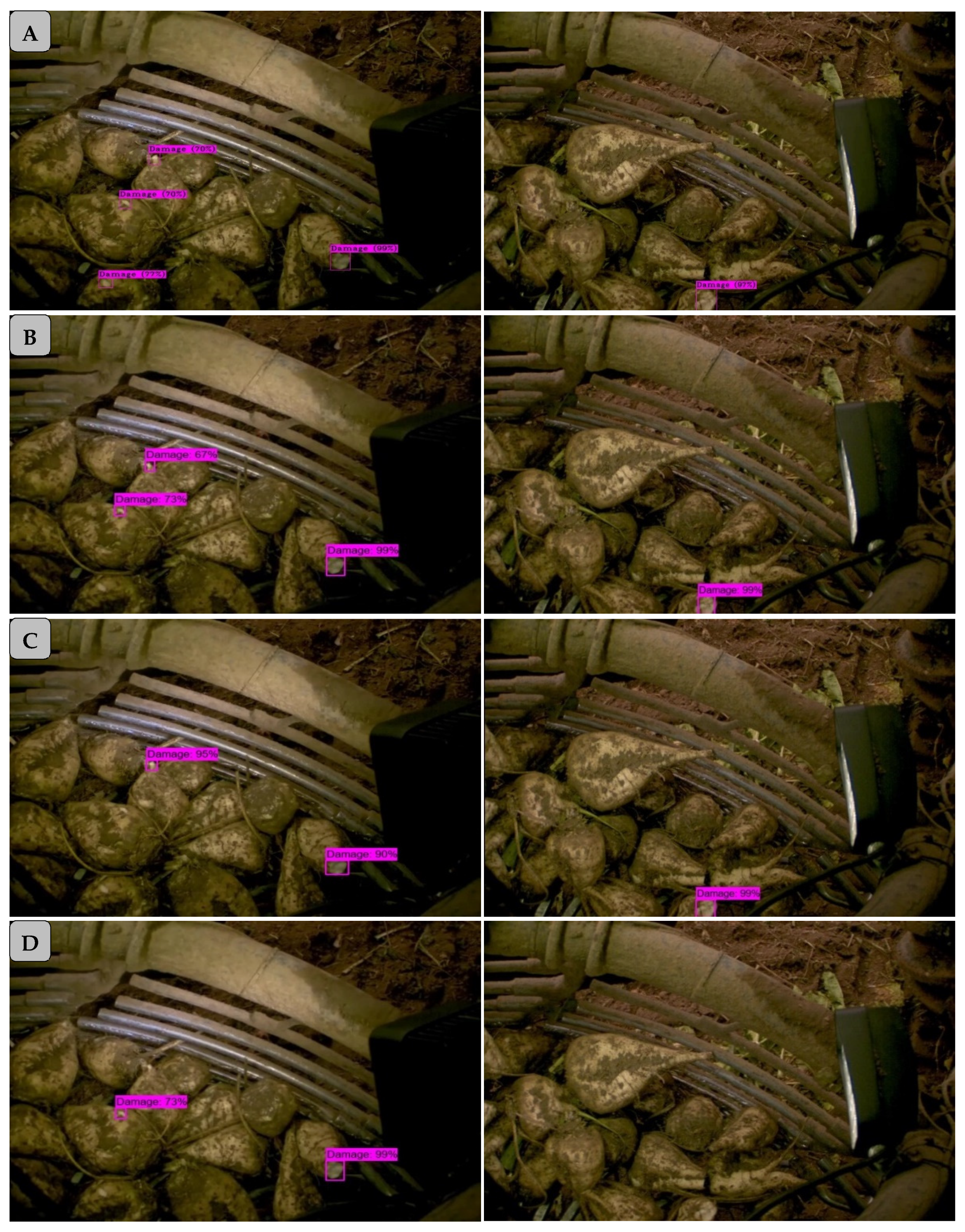
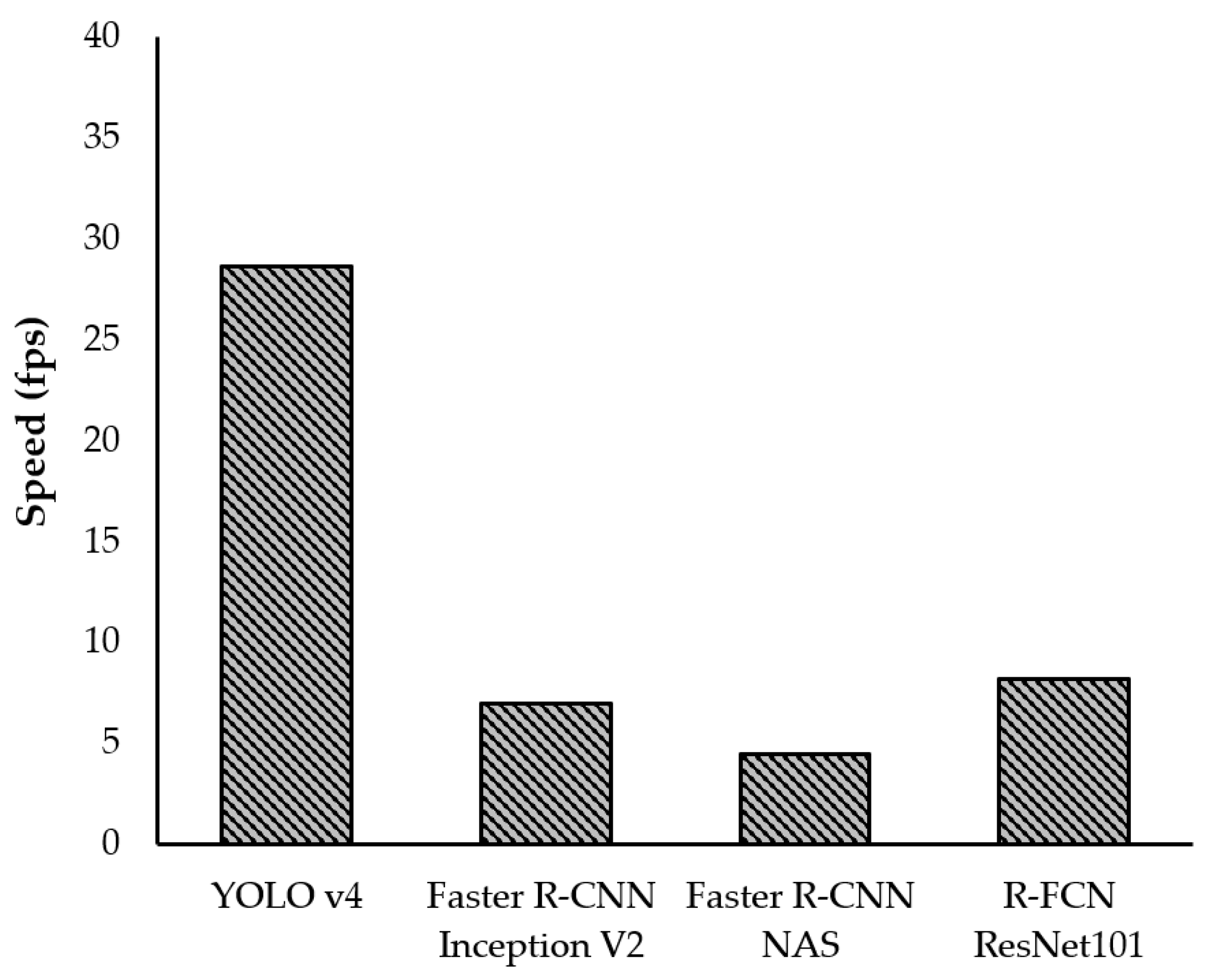
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fugate, K.K.; Ribeiro, W.S.; Lulai, E.C.; Deckard, E.L.; Finger, F.L. Cold temperature delays wound healing in postharvest sugarbeet roots. Front. Plant Sci. 2016, 7, 499. [Google Scholar] [CrossRef] [Green Version]
- Bentini, M.; Caprara, C.; Rondelli, V.; Caliceti, M. The use of an electronic beet to evaluate sugar beet damage at various forward speeds of a mechanical harvester. Trans. ASAE 2002, 45, 547. [Google Scholar] [CrossRef]
- Huijbregts, T.; Legrand, G.; Hoffmann, C.; Olsson, R.; Olsson, Å. Long-Term Storage of Sugar Beet in North-West Europe. Coordination Beet Research International. Report No. 1-2013. 2013. Available online: https://www.nordicbeet.nu/wp-content/uploads/2016/04/COBRI-storage-report-2013-final-131004.pdf (accessed on 7 November 2021).
- Kołodziej, P.; Gołacki, K.; Boryga, M. Impact characteristics of sugar beet root during postharvest storage. Int. Agrophysics 2019, 33, 355–361. [Google Scholar] [CrossRef]
- Hoffmann, C.M.; Schnepel, K. Susceptibility to root tip breakage increases storage losses of sugar beet genotypes. Sugar Ind. 2016, 141, 625–632. [Google Scholar] [CrossRef]
- Nasirahmadi, A.; Ashtiani, S.H.M. Bag-of-Feature model for sweet and bitter almond classification. Biosyst. Eng. 2017, 156, 51–60. [Google Scholar] [CrossRef] [Green Version]
- Rojas-Moraleda, R.; Valous, N.A.; Gowen, A.; Esquerre, C.; Härtel, S.; Salinas, L.; O’donnell, C. A frame-based ANN for classification of hyperspectral images: Assessment of mechanical damage in mushrooms. Neural Comput. Appl. 2017, 28, 969–981. [Google Scholar] [CrossRef]
- Hu, M.H.; Zhao, Y.; Zhai, G.T. Active learning algorithm can establish classifier of blueberry damage with very small training dataset using hyperspectral transmittance data. Chemom. Intell. Lab. Syst. 2018, 172, 52–57. [Google Scholar] [CrossRef]
- Xiong, J.; Lin, R.; Bu, R.; Liu, Z.; Yang, Z.; Yu, L. A micro-damage detection method of litchi fruit using hyperspectral imaging technology. Sensors 2018, 18, 700. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Salimi, Z.; Boelt, B. Classification of processing damage in sugar beet (Beta vulgaris) seeds by multispectral image analysis. Sensors 2019, 19, 2360. [Google Scholar] [CrossRef] [Green Version]
- Oraño, J.F.V.; Maravillas, E.A.; Aliac, C.J.G. Jackfruit Fruit Damage Classification using Convolutional Neural Network. In Proceedings of the 2019 IEEE 11th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Laoag, Philippines, 29 November–1 December 2019; pp. 1–6. [Google Scholar]
- Korchagin, S.A.; Gataullin, S.T.; Osipov, A.V.; Smirnov, M.V.; Suvorov, S.V.; Serdechnyi, D.V.; Bublikov, K.V. Development of an Optimal Algorithm for Detecting Damaged and Diseased Potato Tubers Moving along a Conveyor Belt Using Computer Vision Systems. Agronomy 2021, 11, 1980. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, Z. Potato Surface Defect Detection Based on Deep Transfer Learning. Agriculture 2021, 11, 863. [Google Scholar] [CrossRef]
- Zhou, H.; Zhuang, Z.; Liu, Y.; Liu, Y.; Zhang, X. Defect classification of green plums based on deep learning. Sensors 2020, 20, 6993. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Wang, S. Broken corn detection based on an adjusted YOLO with focal loss. IEEE Access 2019, 7, 68281–68289. [Google Scholar] [CrossRef]
- Huynh, Q.K.; Nguyen, C.N.; Vo-Nguyen, H.P.; Tran-Nguyen, P.L.; Le, P.H.; Le, D.K.L.; Nguyen, V.C. Crack Identification on the Fresh Chilli (Capsicum) Fruit Destemmed System. J. Sens. 2021, 2021, 8838247. [Google Scholar] [CrossRef]
- Schwich, S.; Schattenberg, J.; Frerichs, L. Development of a Machine Learning-based Assistance System for Computer-Aided Process Optimization within a Self-Propelled Sugar Beet Harvester. In Proceedings of the 2020 ASABE Annual International Virtual Meeting, 13–15 July 2020; p. 2000952. Available online: https://elibrary.asabe.org/abstract.asp?aid=51512 (accessed on 7 November 2021).
- Tzutalin. LabelImg. Git Code. 2015. Available online: https://github.com/tzutalin/labelImg (accessed on 7 November 2021).
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. in preprint. [Google Scholar]
- Du, S.; Zhang, P.; Zhang, B.; Xu, H. Weak and occluded vehicle detection in complex infrared environment based on improved YOLOv4. IEEE Access 2021, 9, 25671–25680. [Google Scholar] [CrossRef]
- Mahurkar, R.R.; Gadge, N.G. Real-time COVID-19 Face Mask Detection with YOLOv4. In Proceedings of the 2021 Second International Conference on Electronics and Sustainable Communication Systems (ICESC), Coimbatore, India, 4–6 August 2021; pp. 1250–1255. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nasirahmadi, A.; Sturm, B.; Edwards, S.; Jeppsson, K.-H.; Olsson, A.-C.; Müller, S.; Hensel, O. Deep Learning and Machine Vision Approaches for Posture Detection of Individual Pigs. Sensors 2019, 19, 3738. [Google Scholar] [CrossRef] [Green Version]
- Dhiraj; Jain, D.K. An evaluation of deep learning based object detection strategies for threat object detection in baggage security imagery. Pattern Recognit. Lett. 2019, 120, 112–119. [Google Scholar] [CrossRef]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. In Advances in Neural Information Processing Systems; International Barcelona Convention Center: Barcelona, Spain, 2016; pp. 379–387. [Google Scholar]
- Fuentes, A.; Yoon, S.; Kim, S.C.; Park, D.S. A robust deep-learning-based detector for real-time tomato plant diseases and pests recognition. Sensors 2017, 17, 2022. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, Y.-L.; Anagaw, A.; Chang, L.; Wang, Y.C.; Hsiao, C.-Y.; Lee, W.-H. Ship Detection Based on YOLOv2 for SAR Imagery. Remote Sens. 2019, 11, 786. [Google Scholar] [CrossRef] [Green Version]
- Ye, X.; Duan, L.; Peng, Q. Spatiotemporal Prediction of Theft Risk with Deep Inception-Residual Networks. Smart Cities 2021, 4, 204–216. [Google Scholar] [CrossRef]
- Chen, W.; Lu, S.; Liu, B.; Li, G.; Qian, T. Detecting Citrus in Orchard Environment by Using Improved YOLOv4. Sci. Program. 2020. Available online: https://www.hindawi.com/journals/sp/2020/8859237/ (accessed on 7 November 2021).
- Ji, W.; Gao, X.; Xu, B.; Pan, Y.; Zhang, Z.; Zhao, D. Apple target recognition method in complex environment based on improved YOLOv4. J. Food Process. Eng. 2021, 44, e13866. [Google Scholar] [CrossRef]
- Chen, J.-W.; Lin, W.-J.; Cheng, H.-J.; Hung, C.-L.; Lin, C.-Y.; Chen, S.-P. A Smartphone-Based Application for Scale Pest Detection Using Multiple-Object Detection Methods. Electronics 2021, 10, 372. [Google Scholar] [CrossRef]
- da Silva, D.Q.; Dos Santos, F.N.; Sousa, A.J.; Filipe, V. Visible and Thermal Image-Based Trunk Detection with Deep Learning for Forestry Mobile Robotics. J. Imaging 2021, 7, 176. [Google Scholar] [CrossRef]
- Lim, J.; Ahn, H.S.; Nejati, M.; Bell, J.; Williams, H.; MacDonald, B.A. Deep Neural Network Based Real-time Kiwi Fruit Flower Detection in an Orchard Environment. arXiv 2020, arXiv:2006.04343. in preprint. [Google Scholar]
- Parico, A.I.B.; Ahamed, T. Real Time Pear Fruit Detection and Counting Using YOLOv4 Models and Deep SORT. Sensors 2021, 21, 4803. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Zhao, W. Image fire detection algorithms based on convolutional neural networks. Case Stud. Therm. Eng. 2020, 19, 100625. [Google Scholar] [CrossRef]
- Xin, Y.; Ma, S.; Wei, Y.; Hu, J.; Ding, Z.; Wang, F. Detection of Apple Surface Defect Based on YOLOv3. In Proceedings of the 2021 ASABE Annual International Virtual Meeting, 12–16 June 2021; p. 2100611. [Google Scholar]
- Wu, D.; Lv, S.; Jiang, M.; Song, H. Using channel pruning-based YOLO v4 deep learning algorithm for the real-time and accurate detection of apple flowers in natural environments. Comput. Electron. Agric. 2020, 178, 105742. Available online: https://elibrary.asabe.org/abstract.asp?aid=52438 (accessed on 7 November 2021). [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scale | TP | IoU ≥ 0.5 | FP | IoU < 0.5 |
|---|---|---|---|---|
| Equation | Recall = | Precision = | F1-score = | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasirahmadi, A.; Wilczek, U.; Hensel, O. Sugar Beet Damage Detection during Harvesting Using Different Convolutional Neural Network Models. Agriculture 2021, 11, 1111. https://doi.org/10.3390/agriculture11111111
Nasirahmadi A, Wilczek U, Hensel O. Sugar Beet Damage Detection during Harvesting Using Different Convolutional Neural Network Models. Agriculture. 2021; 11(11):1111. https://doi.org/10.3390/agriculture11111111
Chicago/Turabian StyleNasirahmadi, Abozar, Ulrike Wilczek, and Oliver Hensel. 2021. "Sugar Beet Damage Detection during Harvesting Using Different Convolutional Neural Network Models" Agriculture 11, no. 11: 1111. https://doi.org/10.3390/agriculture11111111
APA StyleNasirahmadi, A., Wilczek, U., & Hensel, O. (2021). Sugar Beet Damage Detection during Harvesting Using Different Convolutional Neural Network Models. Agriculture, 11(11), 1111. https://doi.org/10.3390/agriculture11111111