Adaptive Sliding Mode Trajectory Tracking Control for Unmanned Surface Vehicle with Modeling Uncertainties and Input Saturation



Abstract
1. Introduction
- (1)
- A novel adaptive control strategy based on sliding mode control and backstepping method is presented for the underactuated USV, in which the hyperbolic tangent function and the neural shunting model are adopted to eliminate the chattering phenomenon and the “explosion of complexity” problem of the system, respectively. Comparing with the previous work [28], it is more effective to implement the control scheme in real practice.
- (2)
- Taking full account of the practical engineering, the input saturation is handled by designing an auxiliary system. The MLP technique and the adaptive technology are used to deal with unmodeled dynamics and unknown disturbance bounds, respectively, where the norm of all the weights is estimated instead of estimating each element. Only two weight-norm related parameters are required to be updated in the control law.
2. Problem Formulation and Preliminaries
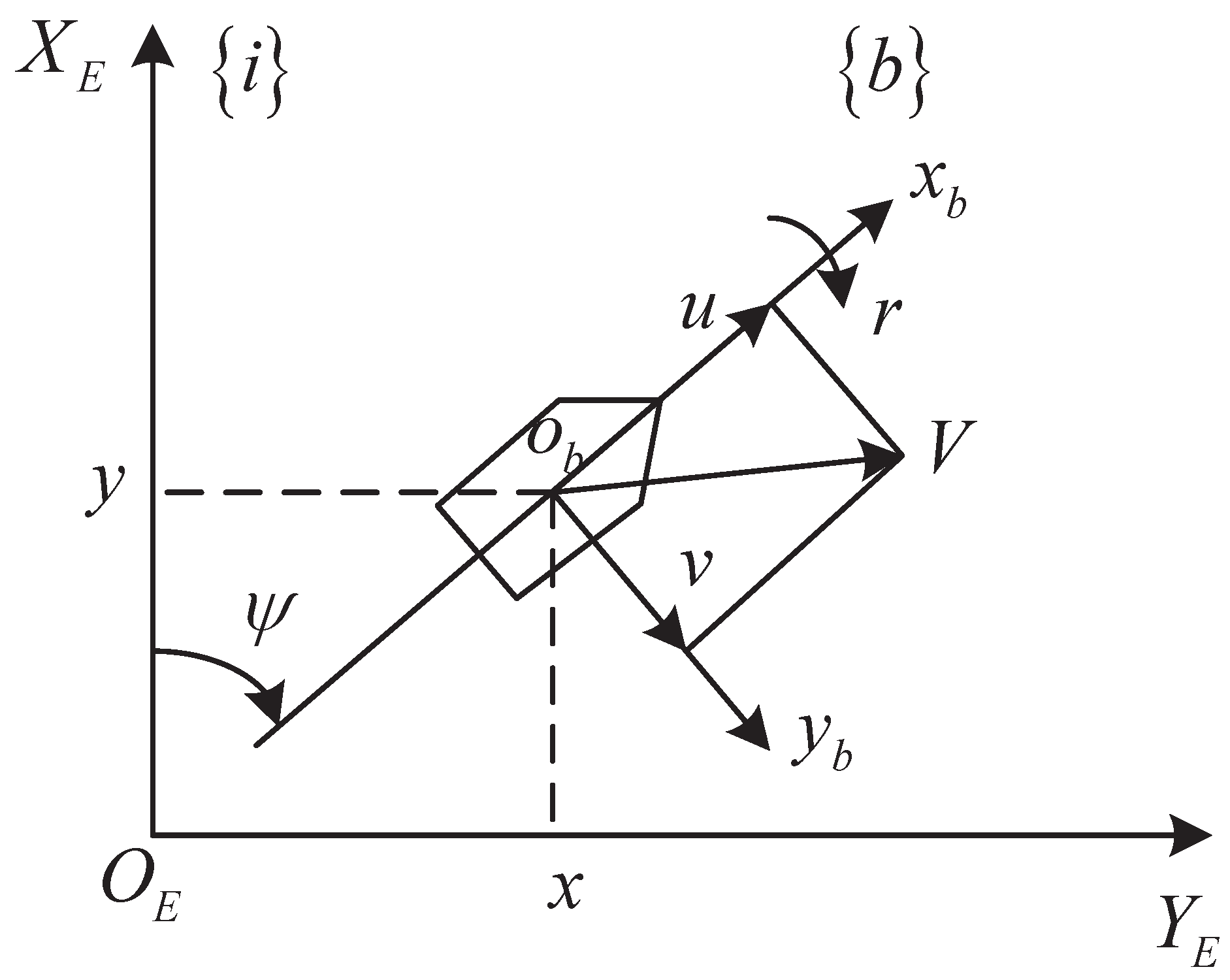
2.1. Problem Formulation
2.2. Neural Network MLP Method
3. Control Design
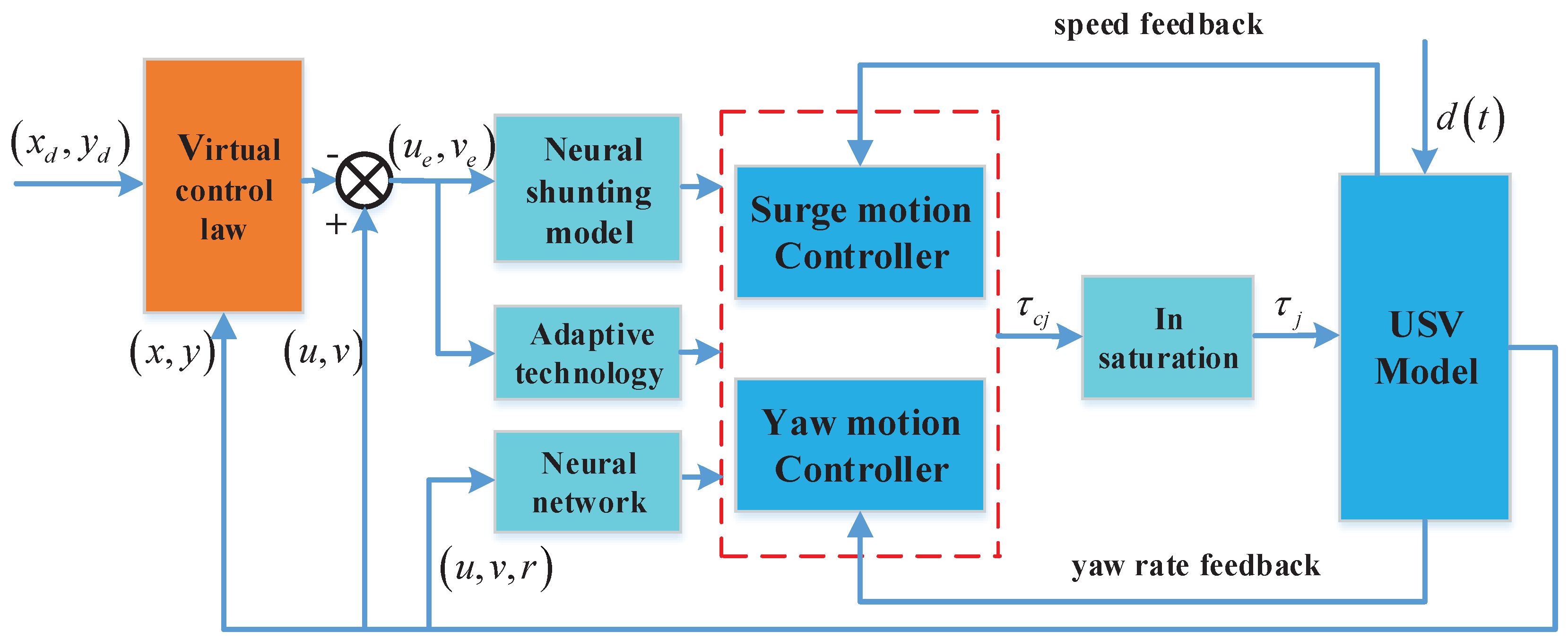
3.1. Structure of the Proposed Adaptive Control Scheme
3.2. Adaptive Sliding Mode Trajectory Tracking Control Design
3.2.1. Virtual Control Law
3.2.2. Surge Motion Control Law
3.2.3. Yaw Motion Control Law
4. Stability Analysis
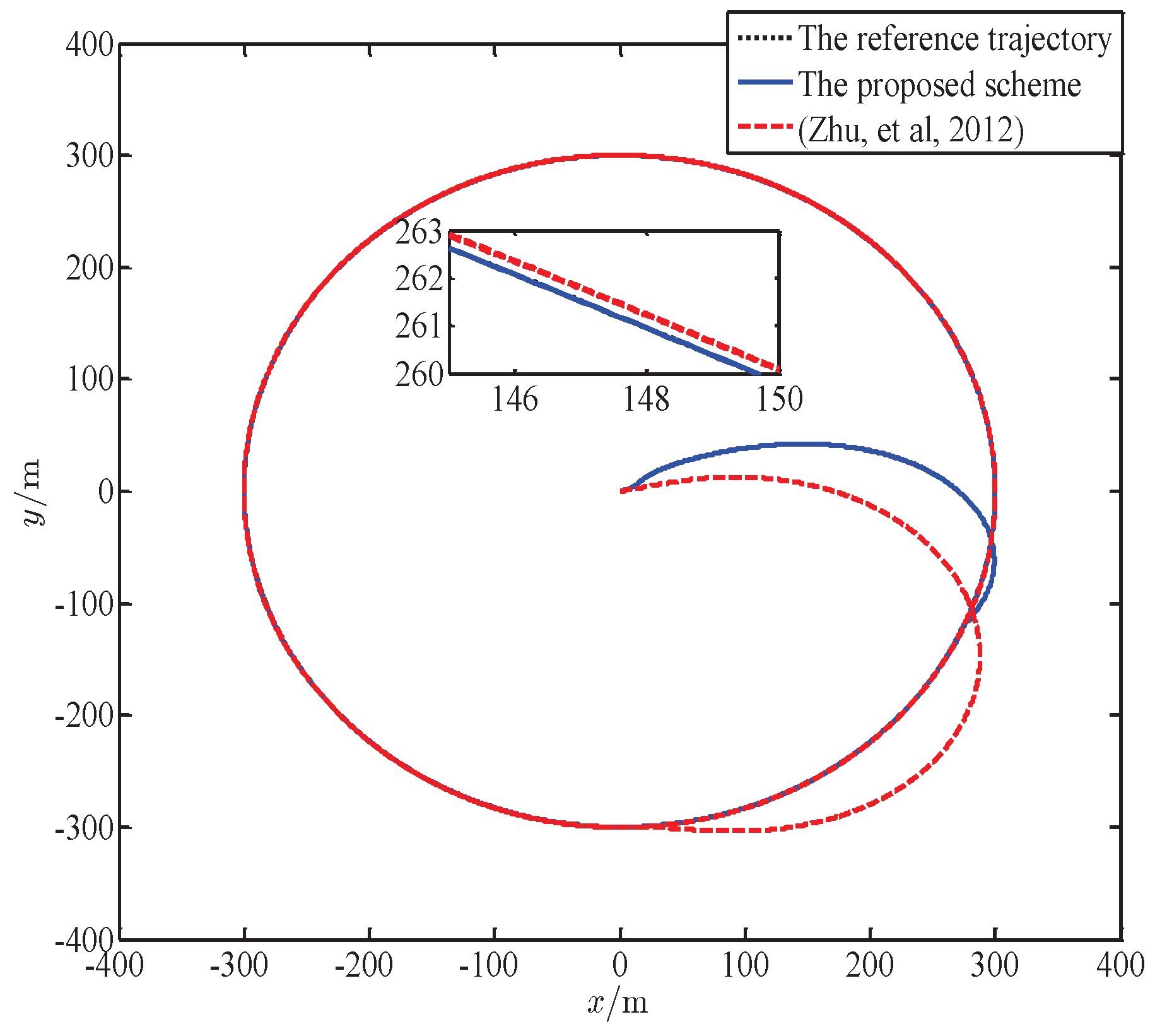
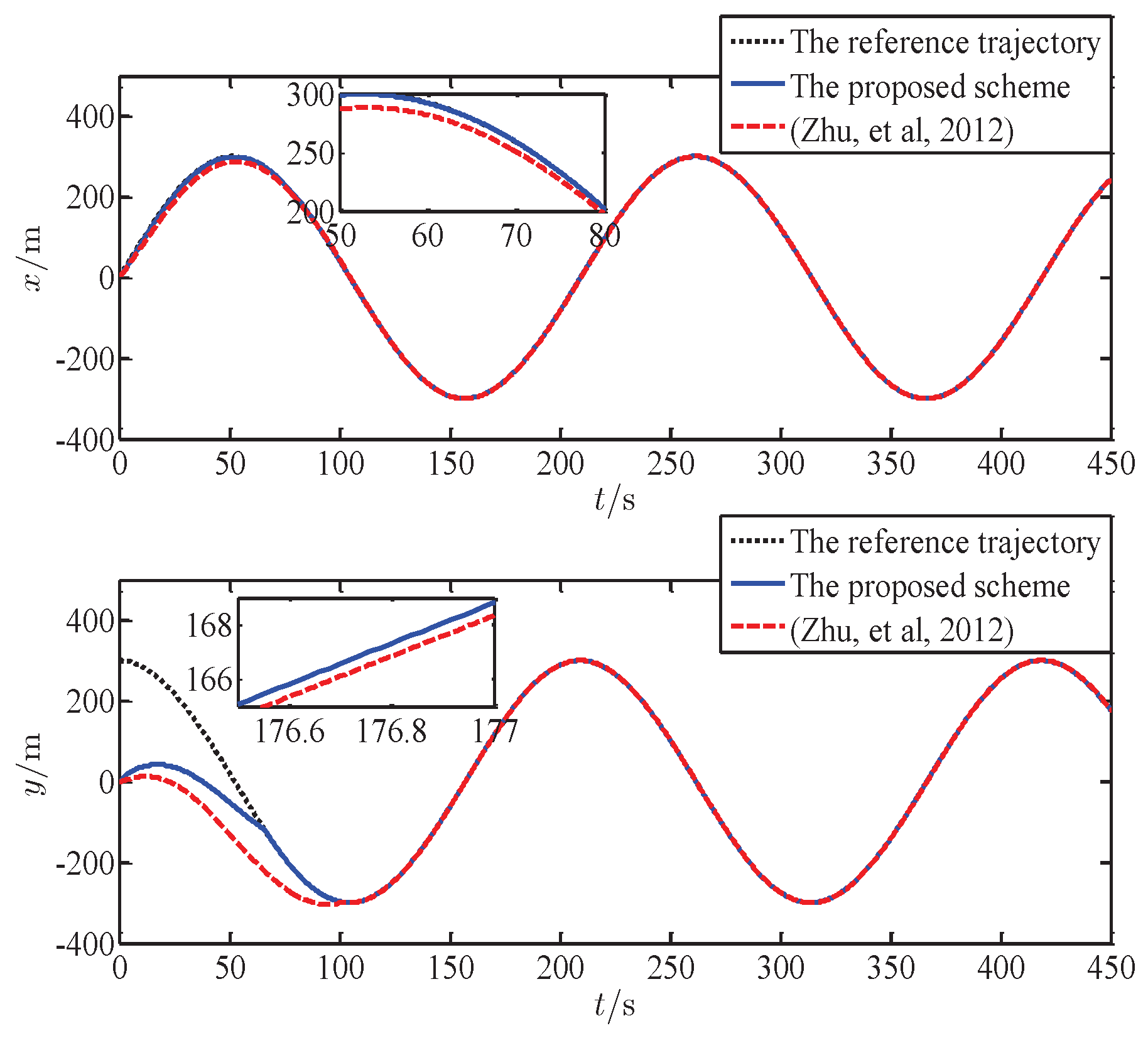
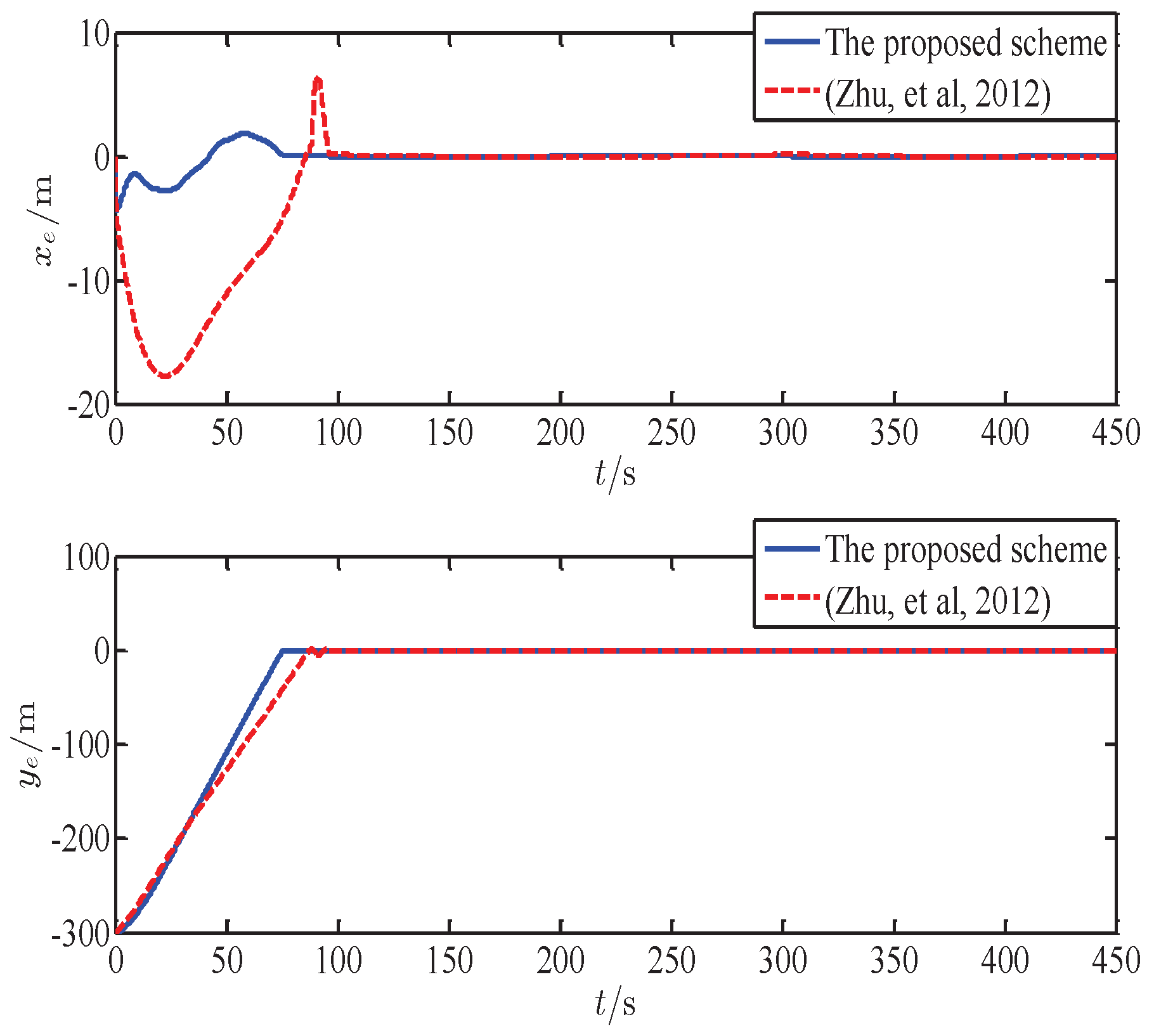
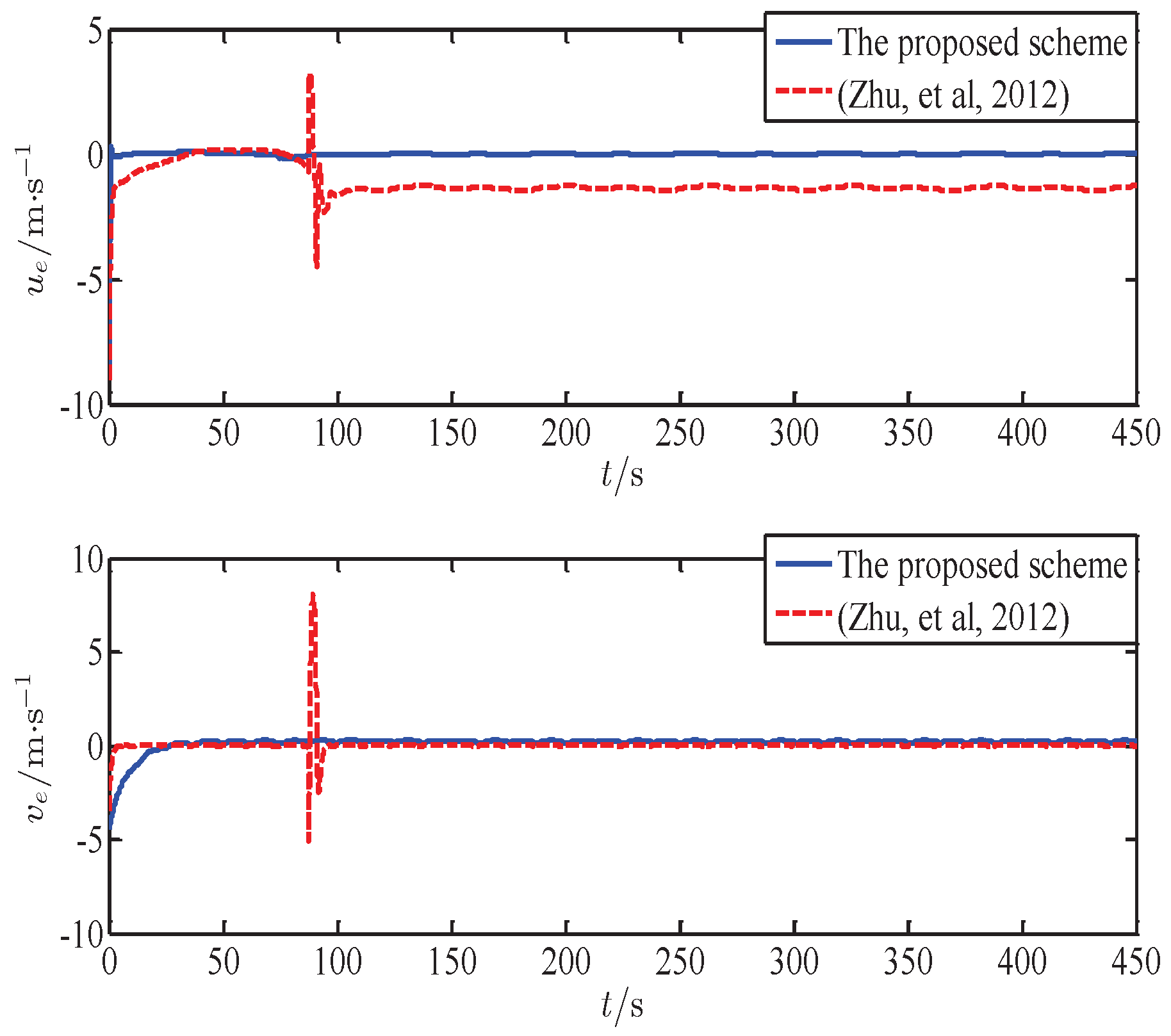
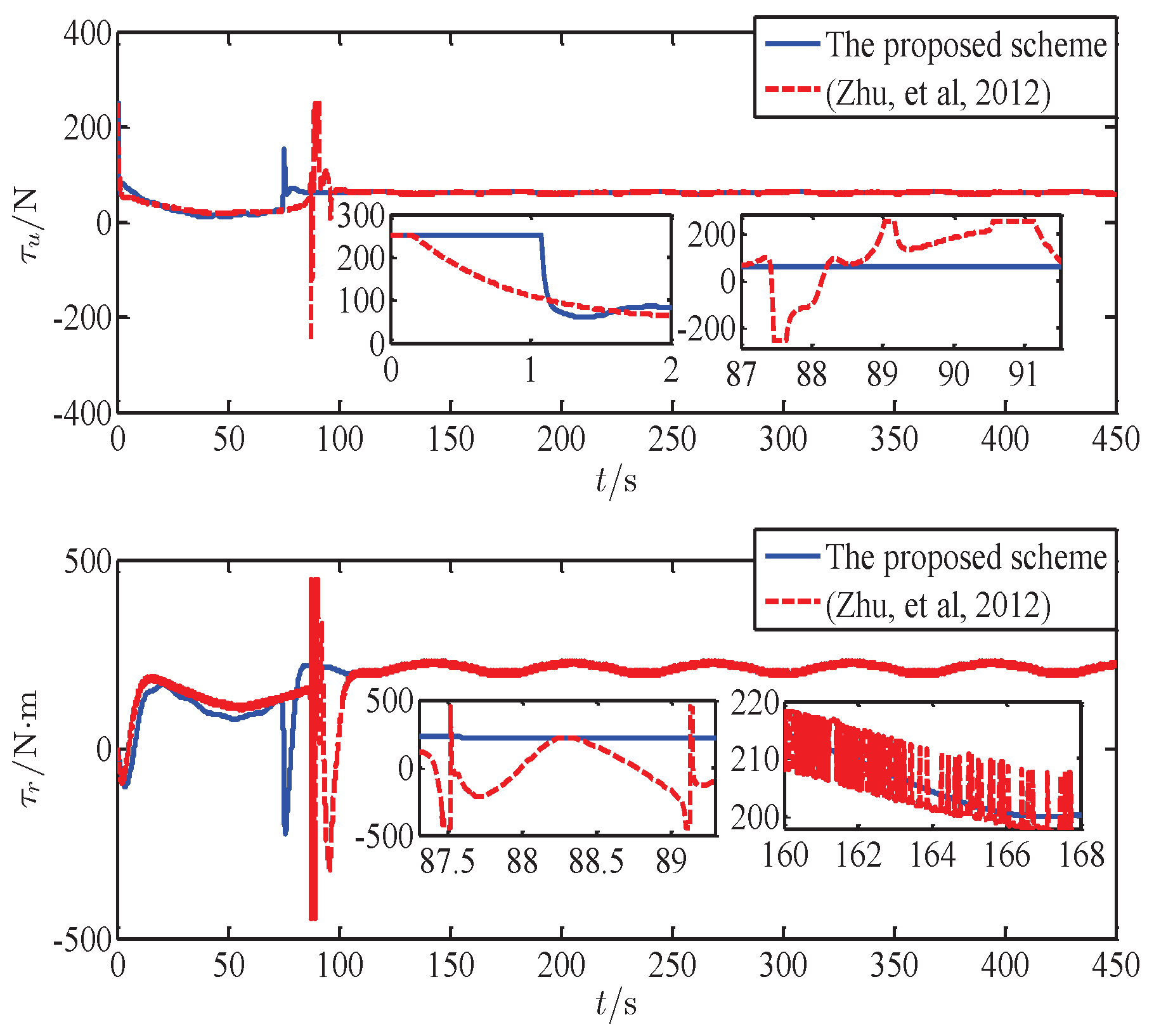
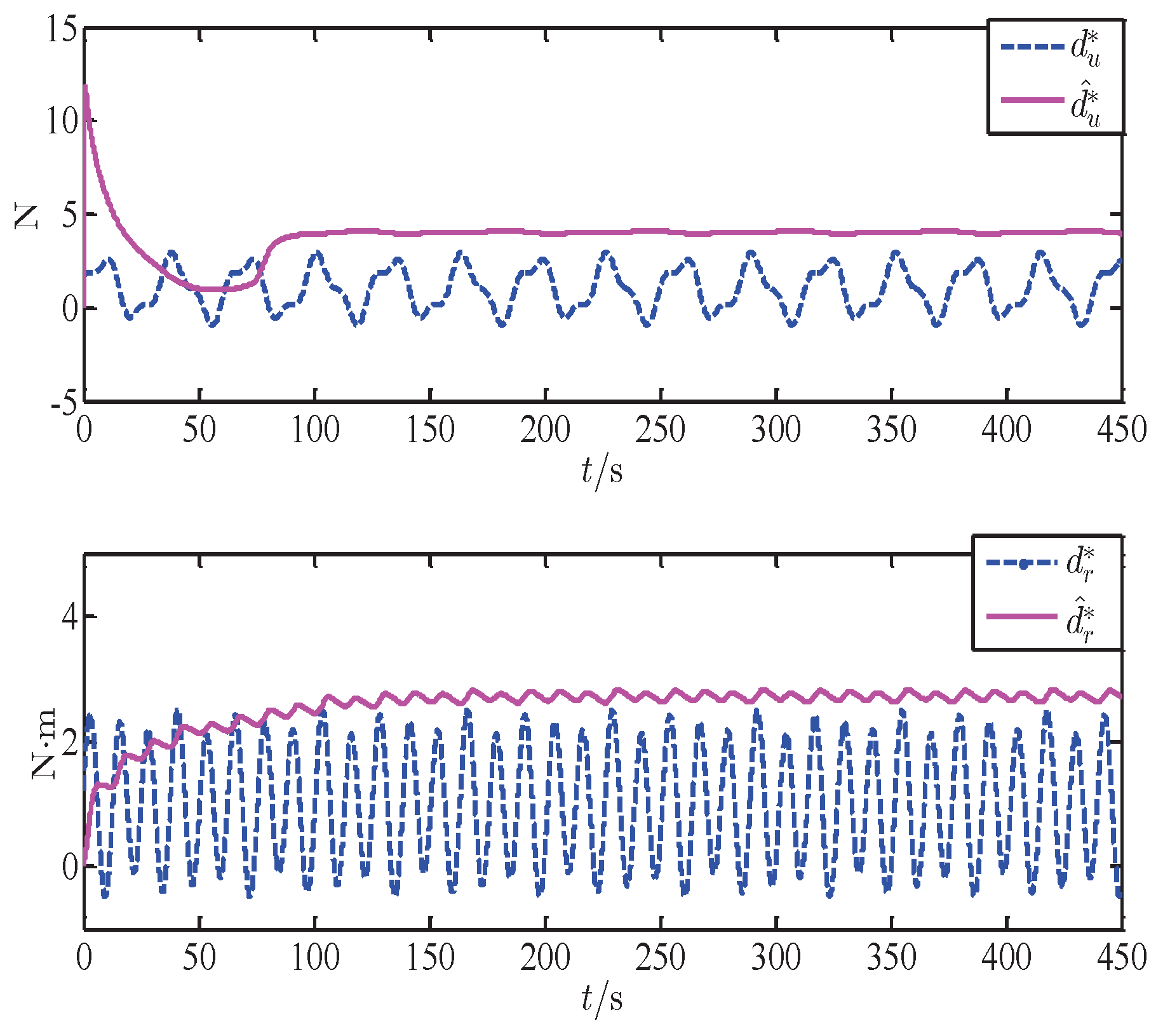
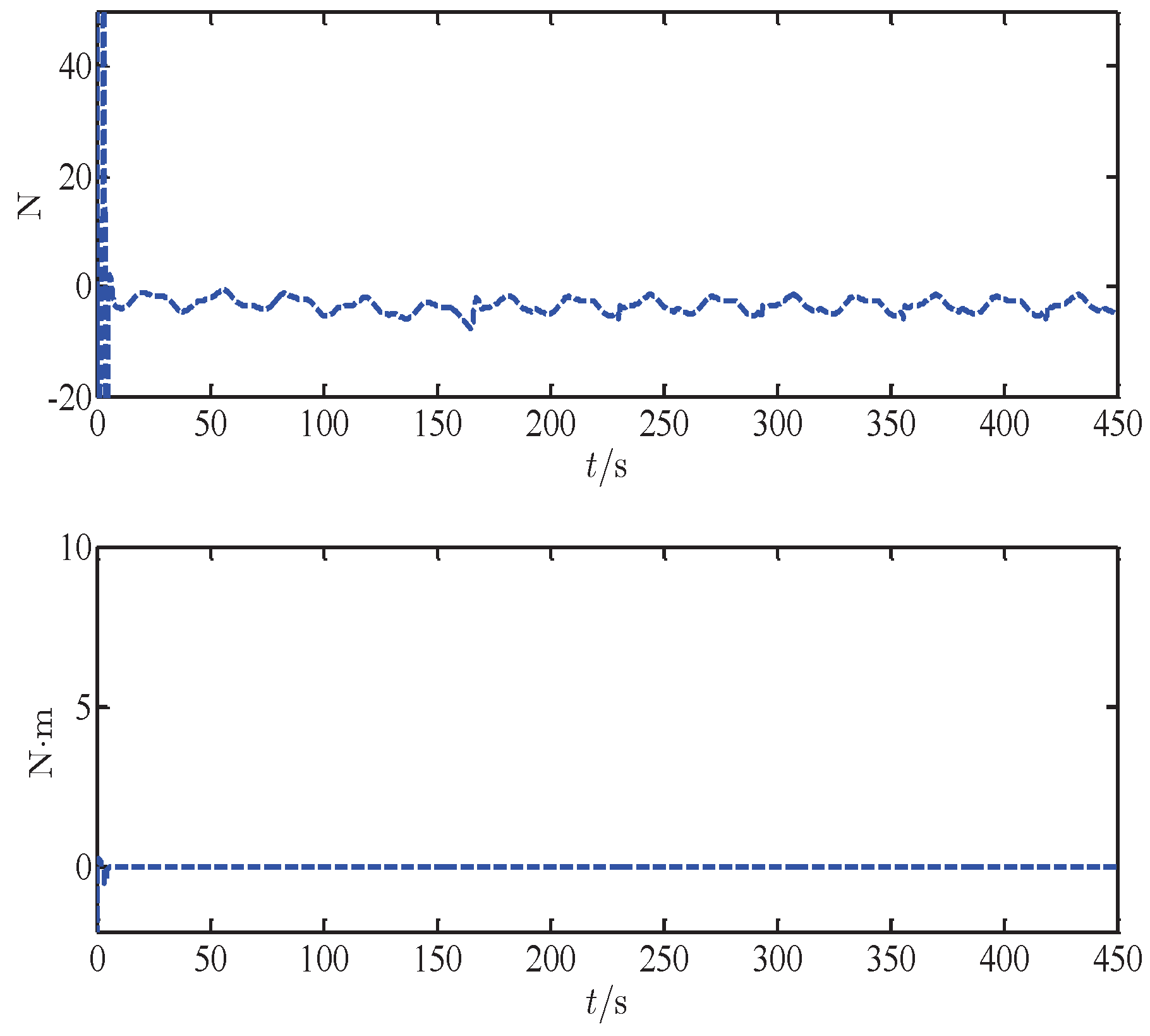
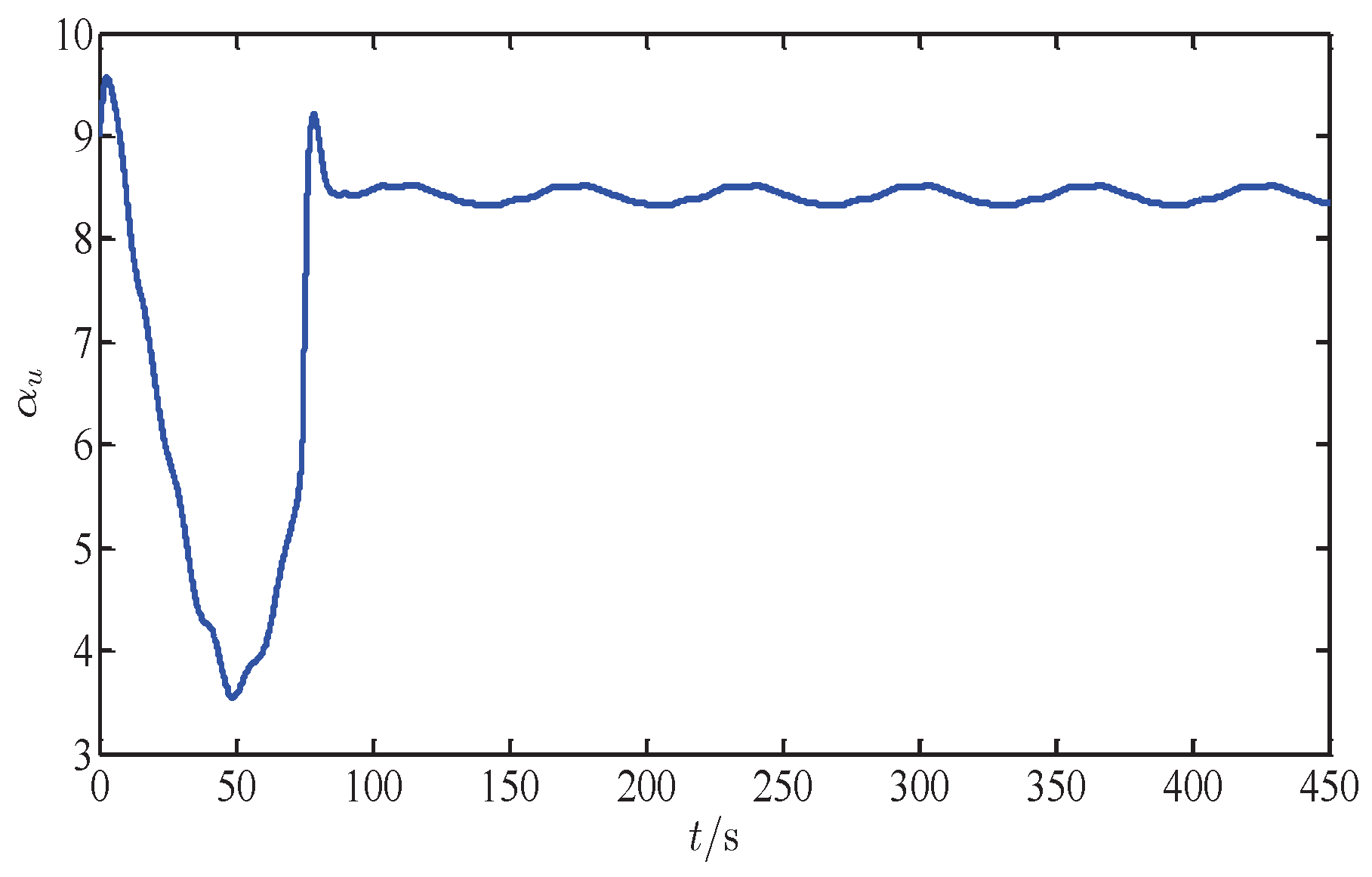
5. Numerical Simulation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| USV | unmanned surface vehicle |
| MLP | minimum learning parameter |
| RBF | radial basis function |
| PI | proportional integral |
| UUB | uniformly ultimately bounded |
References
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control. 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Liu, Y.C.; Bucknall, R. Efficient multi-task allocation and path planning for unmanned surface vehicle in support of ocean operations. Neurocomputing 2018, 275, 1550–1566. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.C.; Bucknall, R. A multi-layered fast marching method for unmanned surface vehicle path planning in a time-variant maritime environment. Ocean Eng. 2018, 129, 301–317. [Google Scholar] [CrossRef]
- Wu, D.; Ren, F.; Qiao, L.; Zhang, W. Active disturbance rejection controller design for dynamically positioned vessels based on adaptive hybrid biogeography-based optimization and differential evolution. ISA Trans. 2018, 78, 56–65. [Google Scholar] [CrossRef] [PubMed]
- Xiang, X.; Yu, C.; Lapierre, L.; Zhang, J.; Zhang, Q. Survey on fuzzy-logic-based guidance and control of marine surface vehicles and underwater vehicles. Int. J. Fuzzy Syst. 2018, 20, 572–586. [Google Scholar] [CrossRef]
- Yang, Y.; Du, J.L.; Liu, H.B.; Guo, C.; Abraham, A. A trajectory tracking robust controller of surface vessels with disturbance uncertainties. IEEE Trans. Control Syst. Technol. 2014, 22, 1511–1518. [Google Scholar] [CrossRef]
- Cheein, F.A.; Scaglia, G. Trajectory tracking controller design for unmanned vehicles: A new methodology. J. Field Rob. 2015, 31, 861–887. [Google Scholar] [CrossRef]
- Do, K.D. Practical control of underactuated ships. Ocean Eng. 2010, 37, 1111–1119. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, L.; Li, Y.; Liu, T.; Zhang, G. Trajectory tracking control of underactuated USV based on modified backstepping approach. Int. J. Naval Archit. Ocean Eng. 2015, 7, 817–832. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y. Tracking control of podded propulsion unmanned surface vehicle with unknown dynamics and disturbance under input saturation. Int. J. Control Autom. Syst. 2018, 16, 1905–1915. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive trajectory tracking control for underactuated unmanned surface vehicle subject to unknown dynamics and time-varing disturbances. Appl. Sci. 2018, 4, 547. [Google Scholar] [CrossRef]
- Serrano, M.E.; Scaglia, G.; Godoy, S.A.; Mut, V.; Ortiz, O.A. Trajectory tracking of underactuated surface vessels: A linear algebra approach. IEEE Trans. Control Syst. Technol. 2014, 22, 1103–1111. [Google Scholar] [CrossRef]
- Ye, L.Q.; Zong, Q. Tracking control of an underactuated ship by modified dynamic inversion. ISA Trans. 2018, 83, 100–106. [Google Scholar] [CrossRef] [PubMed]
- Du, H.; Shi, P. A new robust adaptive control method for modified function projective synchronization with unknown bounded parametric uncertainties and external disturbances. Nonl. Dyn. 2016, 85, 355–363. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. Concise robust adaptive path-following control of underactuated ships using DSC and MLP. IEEE J. Ocean. Eng. 2014, 39, 685–694. [Google Scholar] [CrossRef]
- Liu, Y.J.; Gao, Y.; Tong, S.; Li, Y. Fuzzy approximation-based adaptive backstepping optimal control for a class of nonlinear discrete-time systems with dead-zone. IEEE Trans. Fuzzy Syst. 2016, 24, 16–28. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer-Verlag: Berlin, Germany, 1992. [Google Scholar]
- Ashrafiuon, H.; Muske, K.R. Sliding mode tracking control of surface vessels. IEEE Trans. Ind. Electron. 2008, 55, 4004–4012. [Google Scholar] [CrossRef]
- Yu, R.; Zhu, Q.; Xia, G.; Liu, Z. Sliding mode tracking control of an underactuated surface vessel. IET Control Theory Appl. 2012, 6, 461–466. [Google Scholar] [CrossRef]
- Fahimi, F. Sliding-mode formation control for underactuated surface vessels. IEEE Trans. Rob. 2007, 23, 617–622. [Google Scholar] [CrossRef]
- Yin, S.; Xiao, B. Tracking control of surface ships with disturbance and uncertainties rejection capability. IEEE ASME Trans. Mech. 2016, 22, 1154–1162. [Google Scholar] [CrossRef]
- Xu, J.; Wang, M.; Qiao, L. Dynamical sliding mode control for the trajectory tracking of underactuated unmanned underwater vehicles. Ocean Eng. 2015, 105, 54–63. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, G.; Qiao, L.; Zhang, W.D. Robust adaptive trajectory tracking control of underactuated surface vessel in fields of marine practice. J. Mar. Sci. Technol. 2015, 10, 1–8. [Google Scholar] [CrossRef]
- Han, J. From PID to active sisturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Li, Z.; Sun, J.; Soryeok, O. Design, analysis and experimental validation of a robust nonlinear path following controller for marine surface vessels. Automatica 2009, 45, 1649–1658. [Google Scholar] [CrossRef]
- He, W.; Dong, Y.; Sun, C. Adaptive neural impedance control of a robotic manipulator with input saturation. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 334–344. [Google Scholar] [CrossRef]
- Zhu, G.B.; Du, J.L. Global robust adaptive trajectory tracking control for surface ships under input saturation. IEEE J. Ocean. Eng. 2018, 1–9. [Google Scholar] [CrossRef]
- Zhu, Q.D.; Yu, R.T.; Xia, G.H.; Liu, Z.L. Sliding-mode robust tracking control for underactuated surface vessels with parameter uncertainties and external disturbances. Control Theory Appl. 2012, 29, 959–964. [Google Scholar]
- Chwa, D. Global tracking control of underactuated ships with input and velocity constraints using dynamic surface control method. IEEE Trans. Control Syst. Technol. 2011, 19, 1357–1370. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, D.; Chen, Z.; Hu, X.; Lan, W. Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics. IEEE Trans. Control Syst. Technol. 2013, 21, 513–520. [Google Scholar] [CrossRef]
- Jin, X. Fault tolerant finite-time leader-follower formation control for autonomous surface vessels with LOS range and angle constraints. Automatica 2016, 68, 228–236. [Google Scholar] [CrossRef]
- Ros, S.; Roy, S.B.; Kar, I.N. Adaptive-robust control of Euler-Lagrange systems with linearly parametrizable uncertainty bound. IEEE Trans. Control Syst. Technol. 2018, 26, 1842–1850. [Google Scholar]
- Anastassiou, G.A. Fractional neural network approximation. Comput. Math. Appl. 2012, 64, 1655–1676. [Google Scholar] [CrossRef]
- Zheng, Z.W.; Zou, Y. Adaptive integral LOS path following for an unmanned airship with uncertainties based on robust RBFNN backstepping. ISA Trans. 2016, 65, 210–219. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Sun, X.; Qiu, B. Adaptive LOS path following for a podded propulsion unmanned surface vehicle with uncertainty of model and actuator saturation. Appl. Sci. 2017, 12, 1232. [Google Scholar] [CrossRef]
- Zhu, G.B.; Du, J.L.; Kao, Y.G. Command filtered robust adaptive NN control for a class of uncertain strict-feedback nonlinear systems under input saturation. IEEE Trans. Cybern. 2018, 355, 7548–7569. [Google Scholar] [CrossRef]
- Niu, B.; Li, H.; Zhang, Z.Q.; Li, J.Q.; Hayat, T.; Alsaadi, F.E. Adaptive neural-network-based dynamic surface control for stochastic interconnected nonlinear nonstrict-feedback systems with dead zone. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1–13. [Google Scholar] [CrossRef]
- Niu, B.; Wang, D.; Alotaibi, N.D.; Alsaadi, F.E. Adaptive neural state feedback tracking control of stochastic nonlinear switched systems: An average dwell-time method. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 1076–1087. [Google Scholar] [CrossRef]
- He, W.; Yin, Z.; Sun, C. Adaptive neural network control of a marine vessel with constraints using the asymmetric barrier Lyapunov function. IEEE Trans. Cybern. 2017, 47, 1641–1651. [Google Scholar] [CrossRef]
- Yang, S.X.; Meng, M. An efficient neural network approach to dynamic robot motion planning. IEEE Trans. Cybern. 2000, 13, 143–148. [Google Scholar] [CrossRef]
- Yang, S.X.; Zhu, A.; Yuan, G.F.; Meng, M. A bioinspired neurodynamics-based approach to tracking control of mobile robots. IEEE Trans. Ind. Electron. 2012, 59, 3211–3220. [Google Scholar] [CrossRef]
- Qu, H.; Yang, S.X.; Willms, A.R.; Zhang, Y. Real-time robot path planning based on a modified pulse-coupled neural network model. IEEE Trans. Neural Netw. 2009, 20, 1724–1739. [Google Scholar] [PubMed]
- Chen, M.; Ge, S.S.; Ren, B.B. Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints. Automatica 2011, 47, 452–465. [Google Scholar] [CrossRef]
- Du, J.L.; Hu, X.; Krstic, M.; Sun, Y.Q. Robust dynamic positioning of ships with disturbances under input saturation. Automatica 2016, 73, 207–214. [Google Scholar] [CrossRef]
- Polycarpou, M.M. Fault accommodation of a class of multivariable nonlinear dynamical systems using a learning approach. IEEE Trans. Autom. Control 2001, 46, 736–742. [Google Scholar] [CrossRef]
- Dai, S.L.; Wang, C.; Luo, F. Identification and learning control of ocean surface ship using neural networks. IEEE Trans. Ind. Inf. 2012, 8, 801–810. [Google Scholar] [CrossRef]
- Pan, C.Z.; Lai, X.Z.; Yang, S.X.; Wu, M. An efficient neural network approach to tracking control of an autonomous surface vehicle with unknown dynamics. Expert Syst. Appl. 2013, 40, 1629–1635. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 25.8 | |
| 33.8 | |
| 2.76 | |
| 0.72 | |
| 0.8896 | |
| 1.9 |
| Initial Condition | Controller Parameters |
|---|---|
| , , , | |
| , , , | |
| , , , , | |
| , = 1, = 0.05, = 0.1, = 0.1 | |
| = 2.8, = 0.06, = 2, = 0.005, = 10, | |
| = 0.8, = 5, = 0.5, , , 0.1 |
| MIAC | Value |
|---|---|
| the proposed scheme | |
| (Zhu, et al., 2012) | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, B.; Wang, G.; Fan, Y.; Mu, D.; Sun, X. Adaptive Sliding Mode Trajectory Tracking Control for Unmanned Surface Vehicle with Modeling Uncertainties and Input Saturation. Appl. Sci. 2019, 9, 1240. https://doi.org/10.3390/app9061240
Qiu B, Wang G, Fan Y, Mu D, Sun X. Adaptive Sliding Mode Trajectory Tracking Control for Unmanned Surface Vehicle with Modeling Uncertainties and Input Saturation. Applied Sciences. 2019; 9(6):1240. https://doi.org/10.3390/app9061240
Chicago/Turabian StyleQiu, Bingbing, Guofeng Wang, Yunsheng Fan, Dongdong Mu, and Xiaojie Sun. 2019. "Adaptive Sliding Mode Trajectory Tracking Control for Unmanned Surface Vehicle with Modeling Uncertainties and Input Saturation" Applied Sciences 9, no. 6: 1240. https://doi.org/10.3390/app9061240
APA StyleQiu, B., Wang, G., Fan, Y., Mu, D., & Sun, X. (2019). Adaptive Sliding Mode Trajectory Tracking Control for Unmanned Surface Vehicle with Modeling Uncertainties and Input Saturation. Applied Sciences, 9(6), 1240. https://doi.org/10.3390/app9061240