WAMS-Based Online Disturbance Estimation in Interconnected Power Systems Using Disturbance Observer

 ,
,  and
and
Abstract
:1. Introduction
2. WAMS-Based Power System Modeling
2.1. WAMS Model Setup
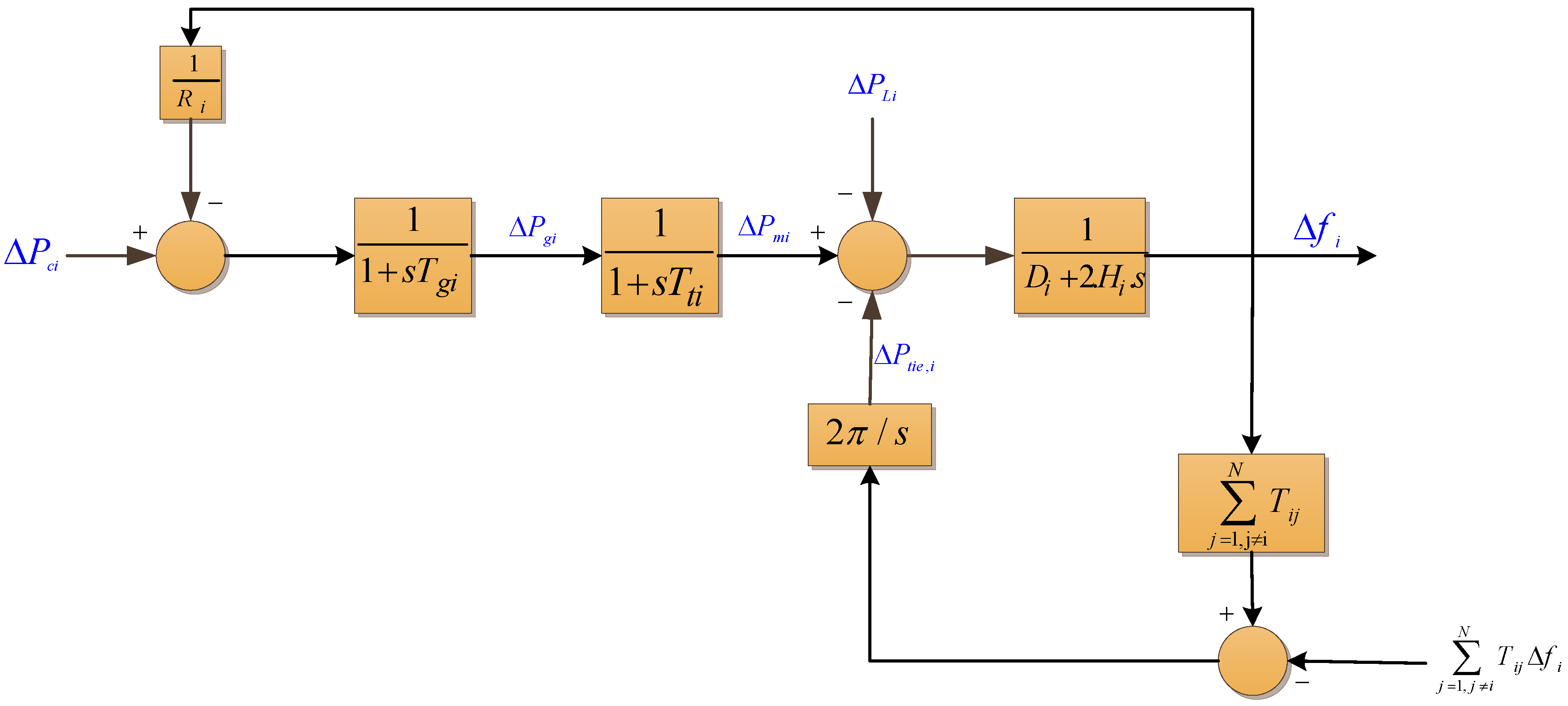
2.2. Power System Dynamic Modelling
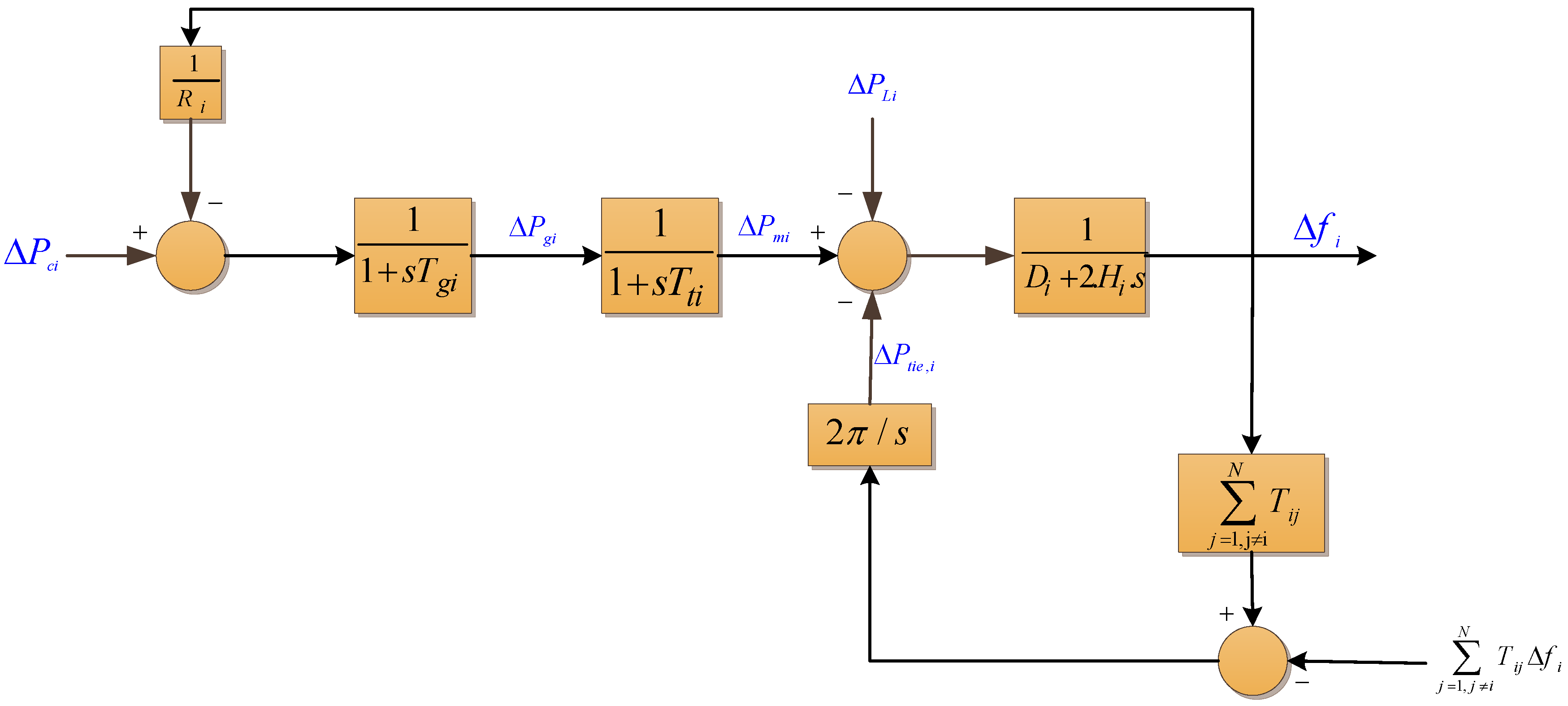
2.3. Single Area Dynamics
2.4. Multi Area Dynamics
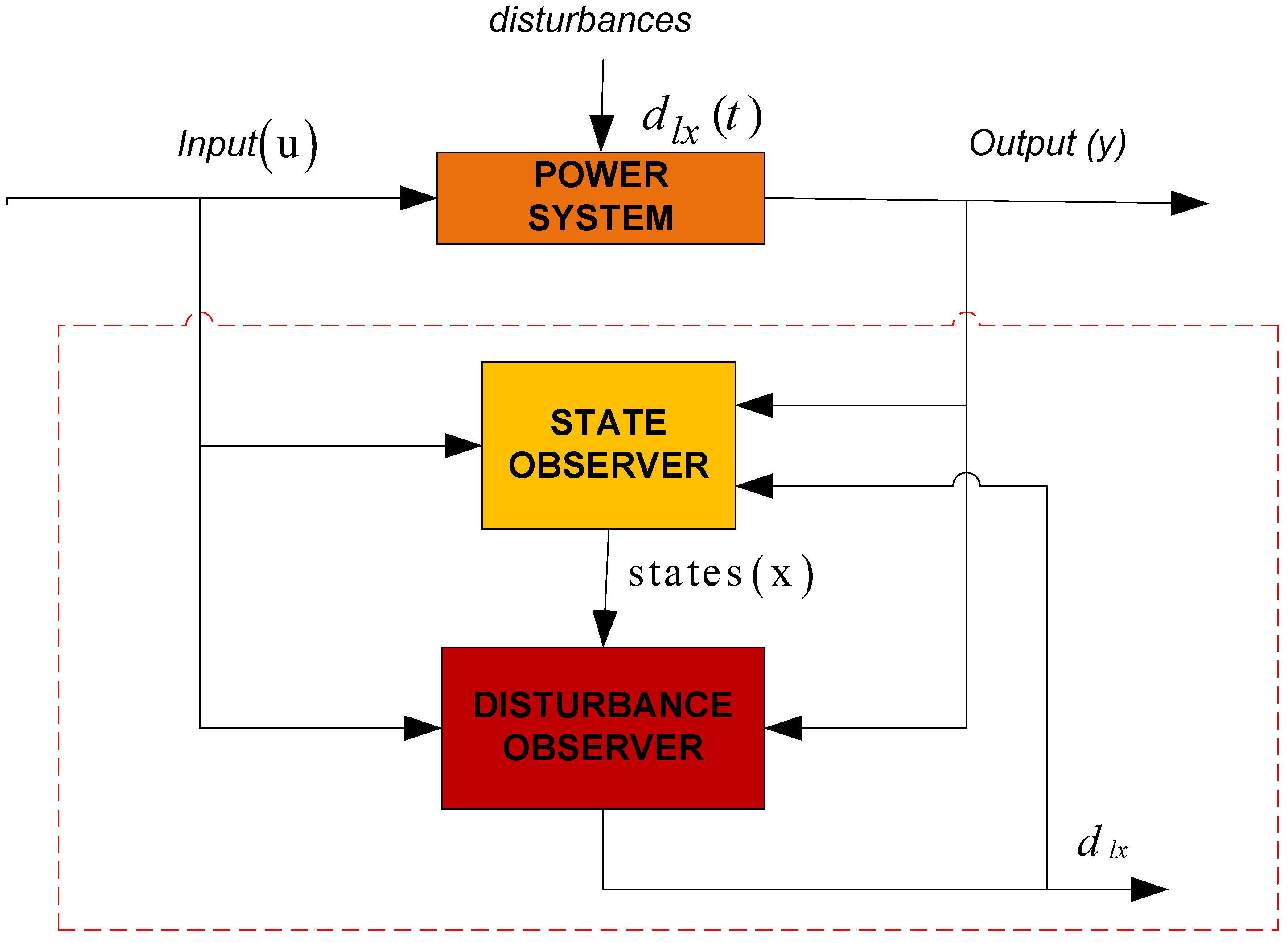
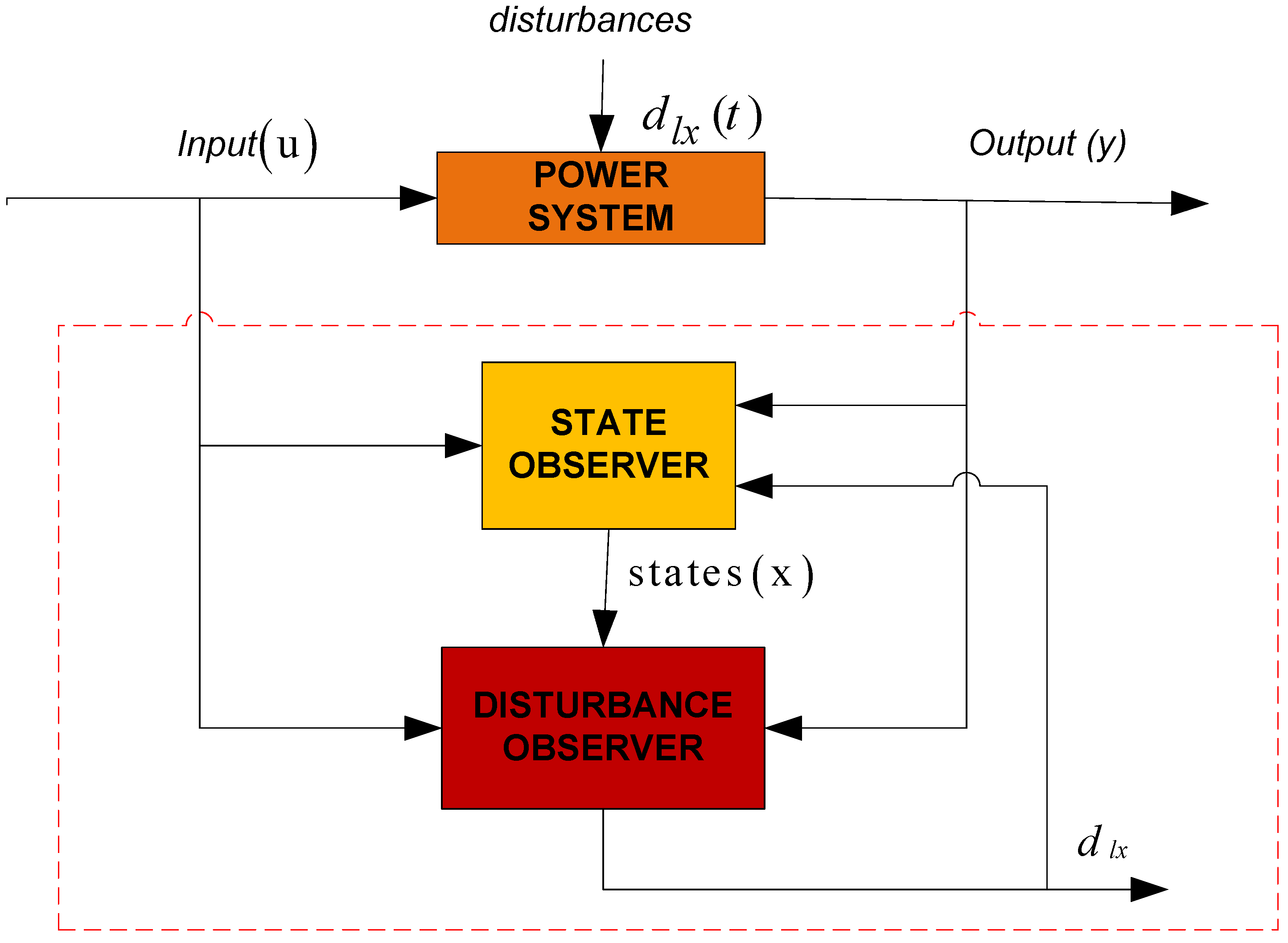
3. Proposed Disturbance Observer-Based Disturbance Estimation
3.1. State Observer Design
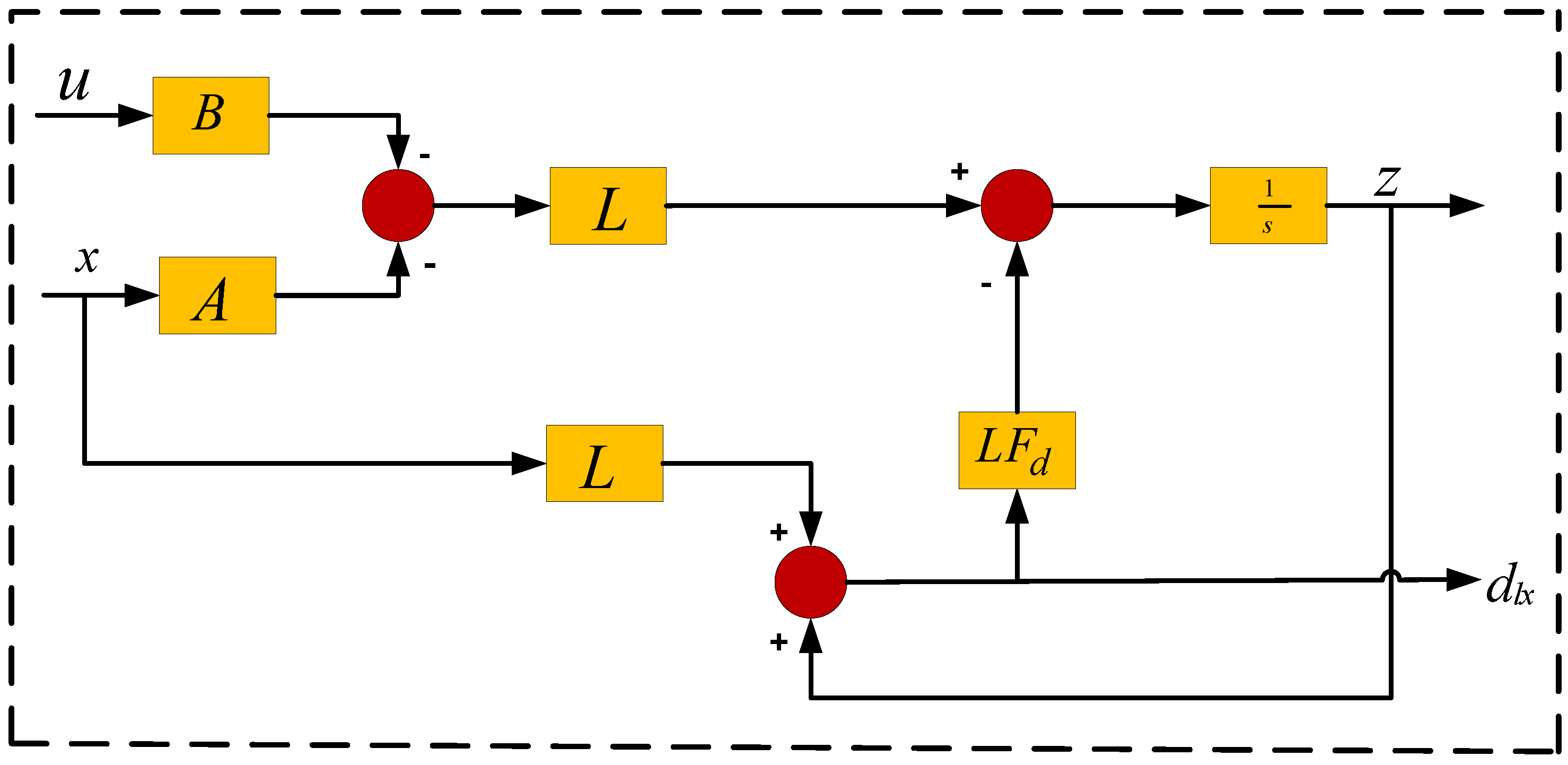
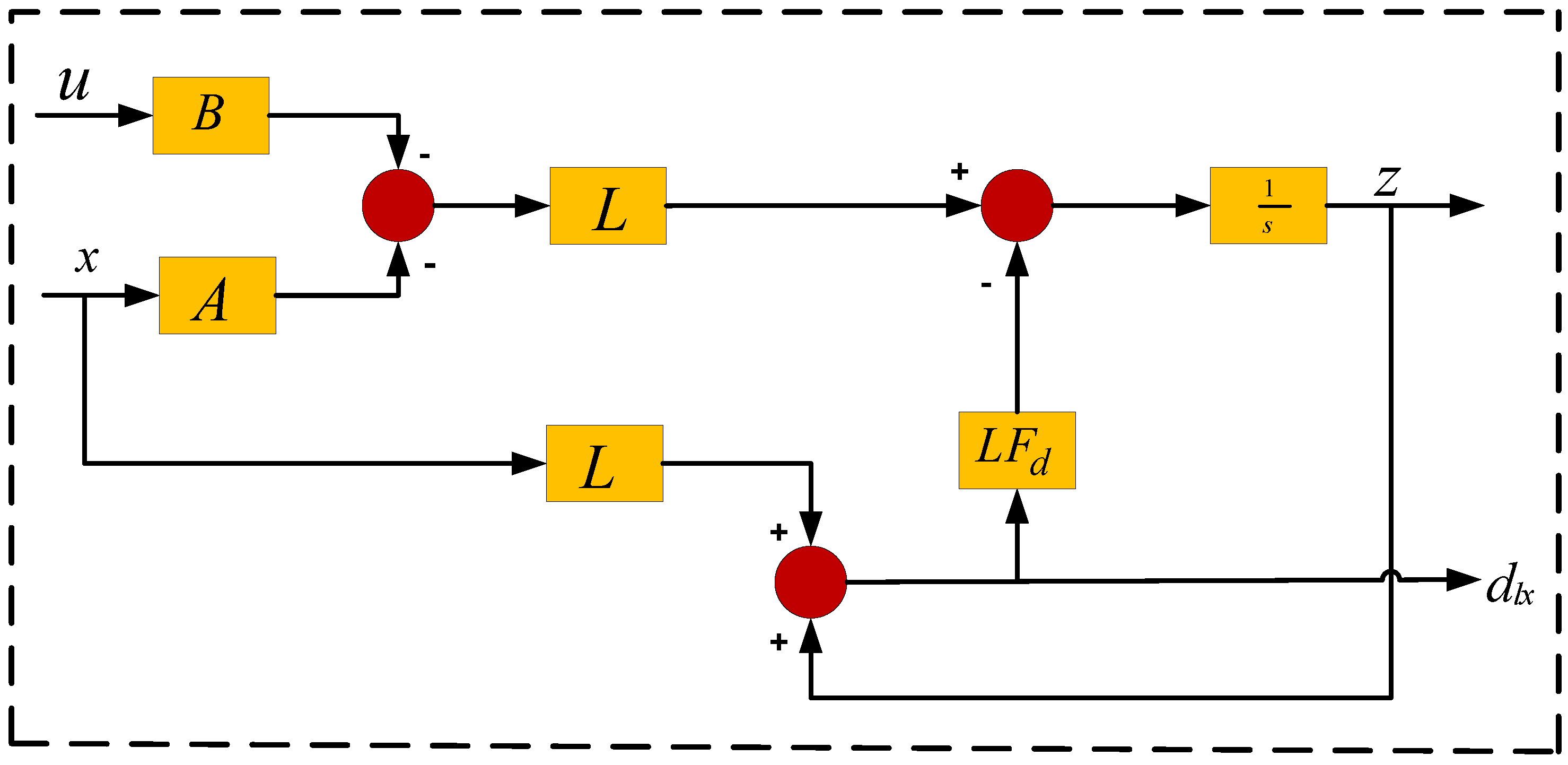
3.2. Disturbance Observer Design
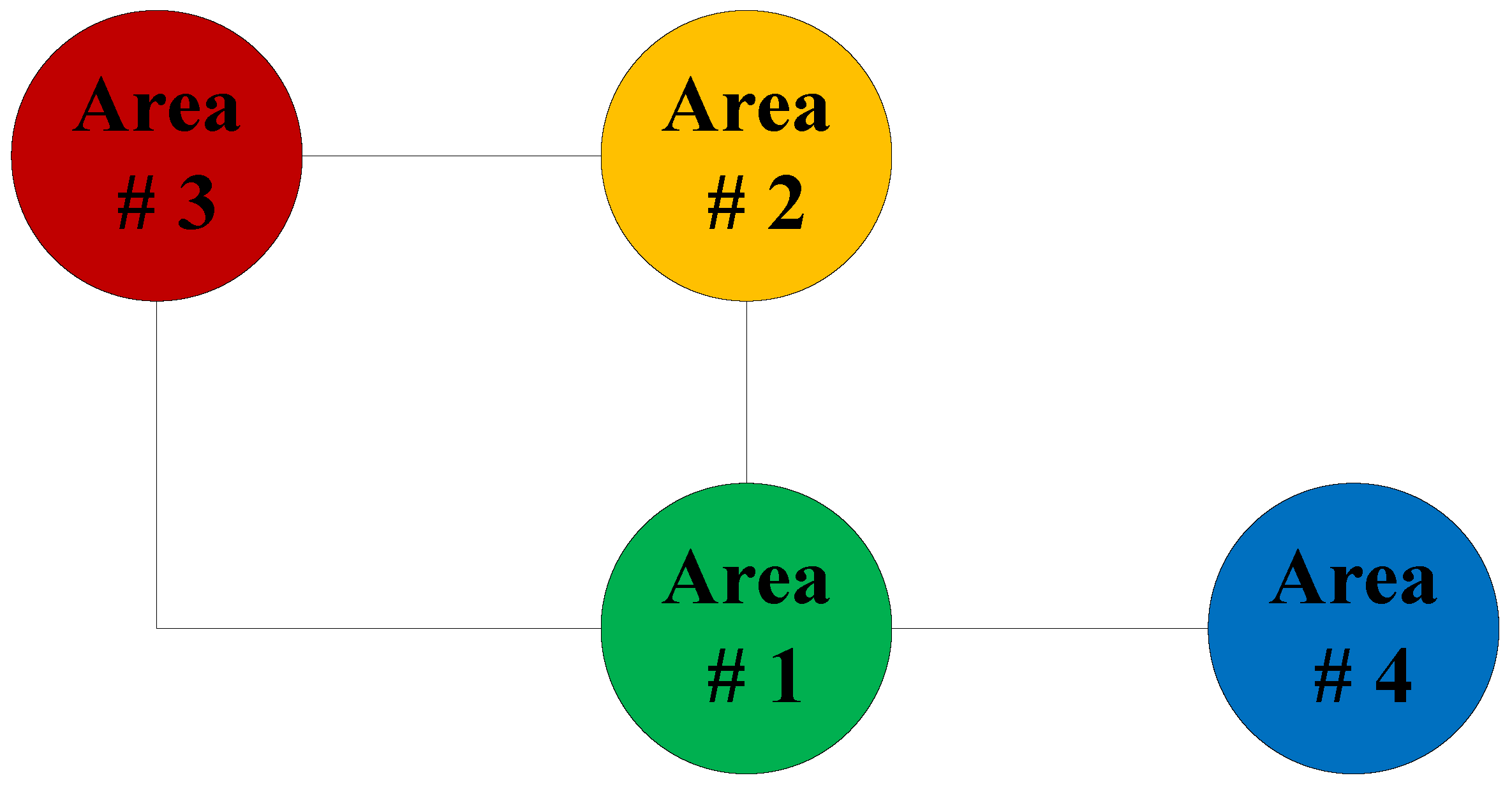
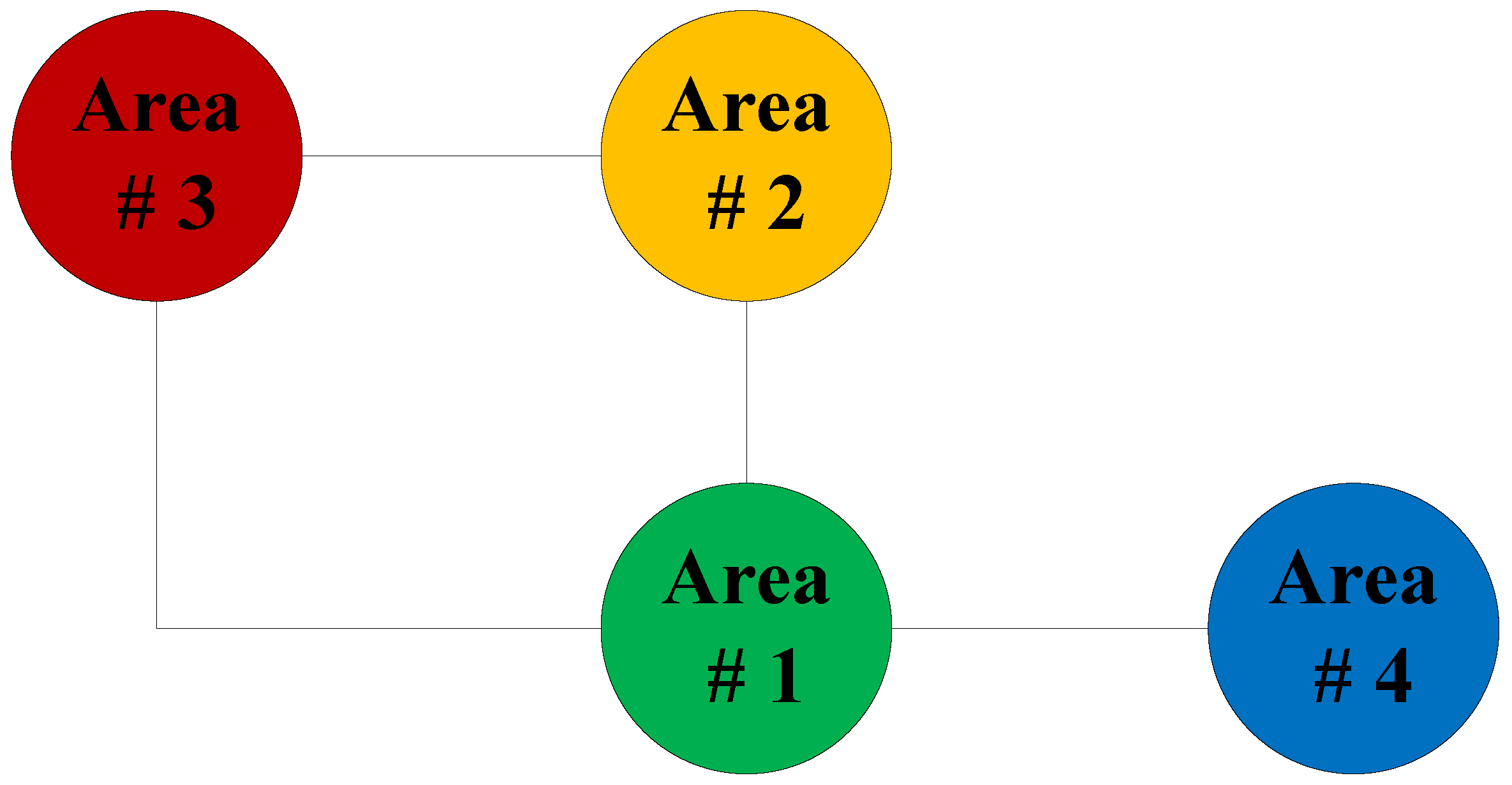
4. Power System Under Investigation
5. Simulation Results and Discussions
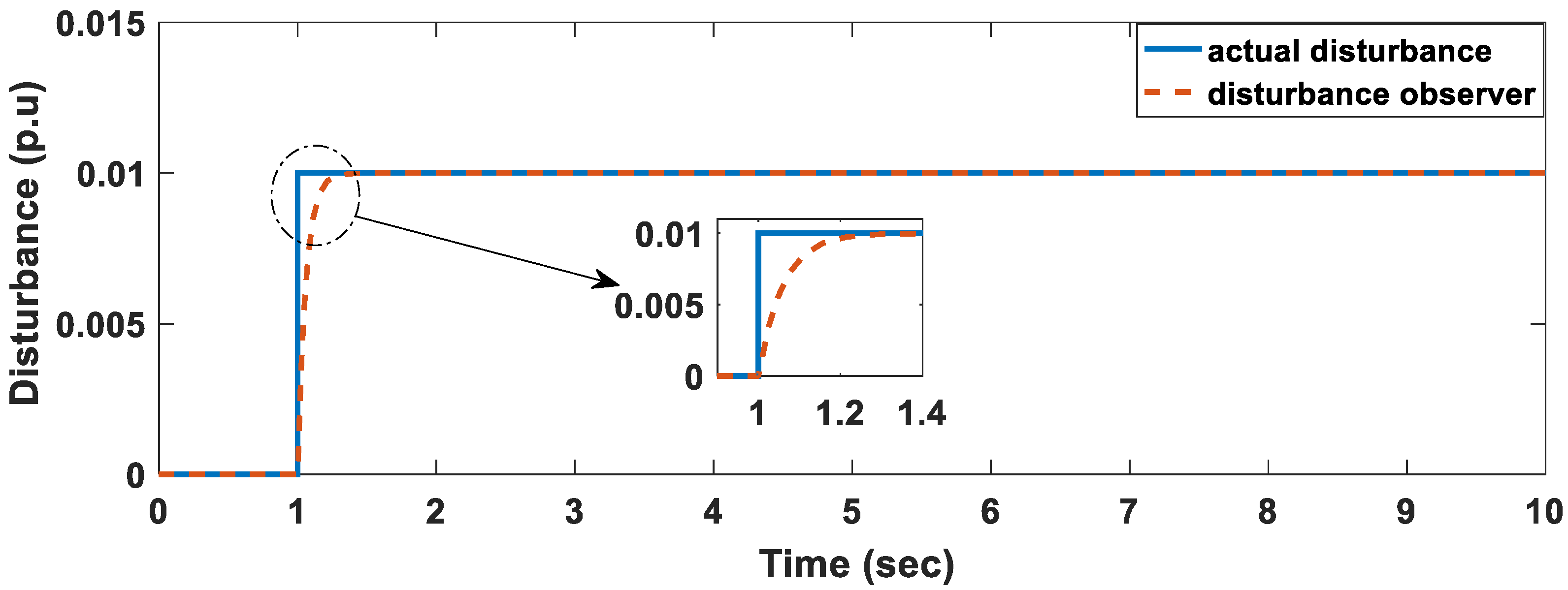
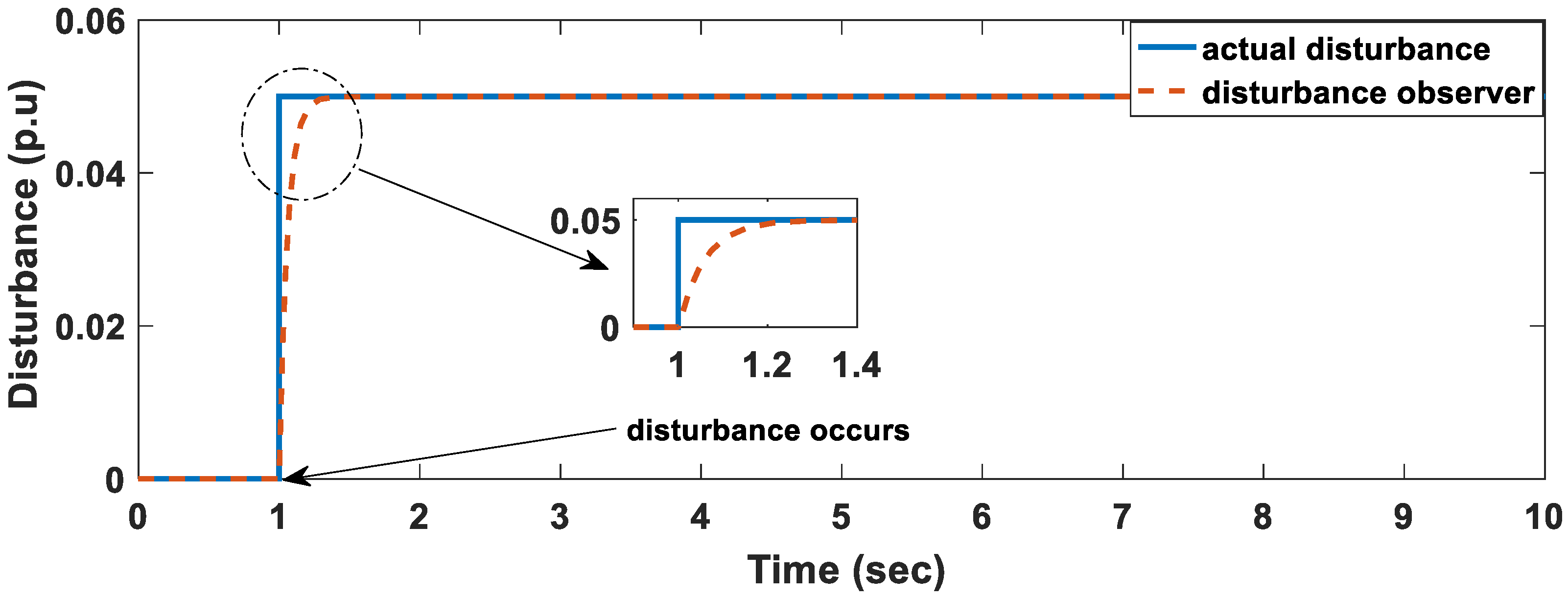
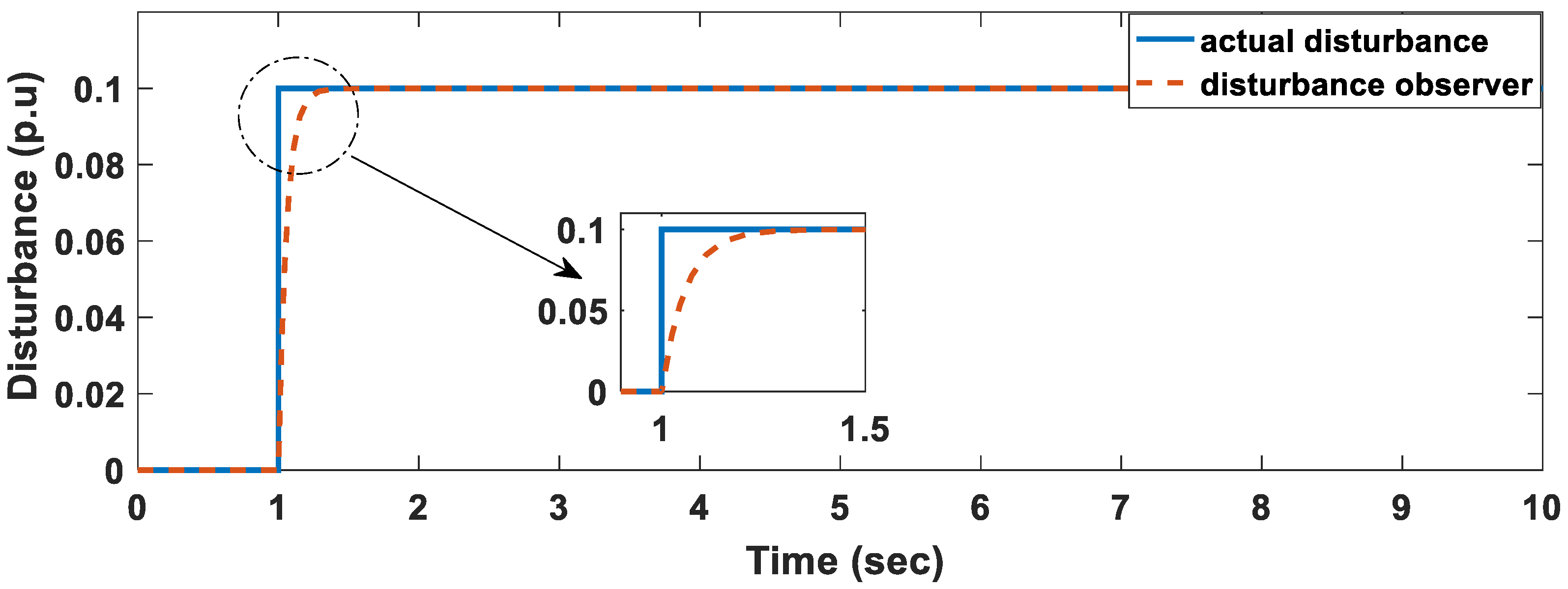
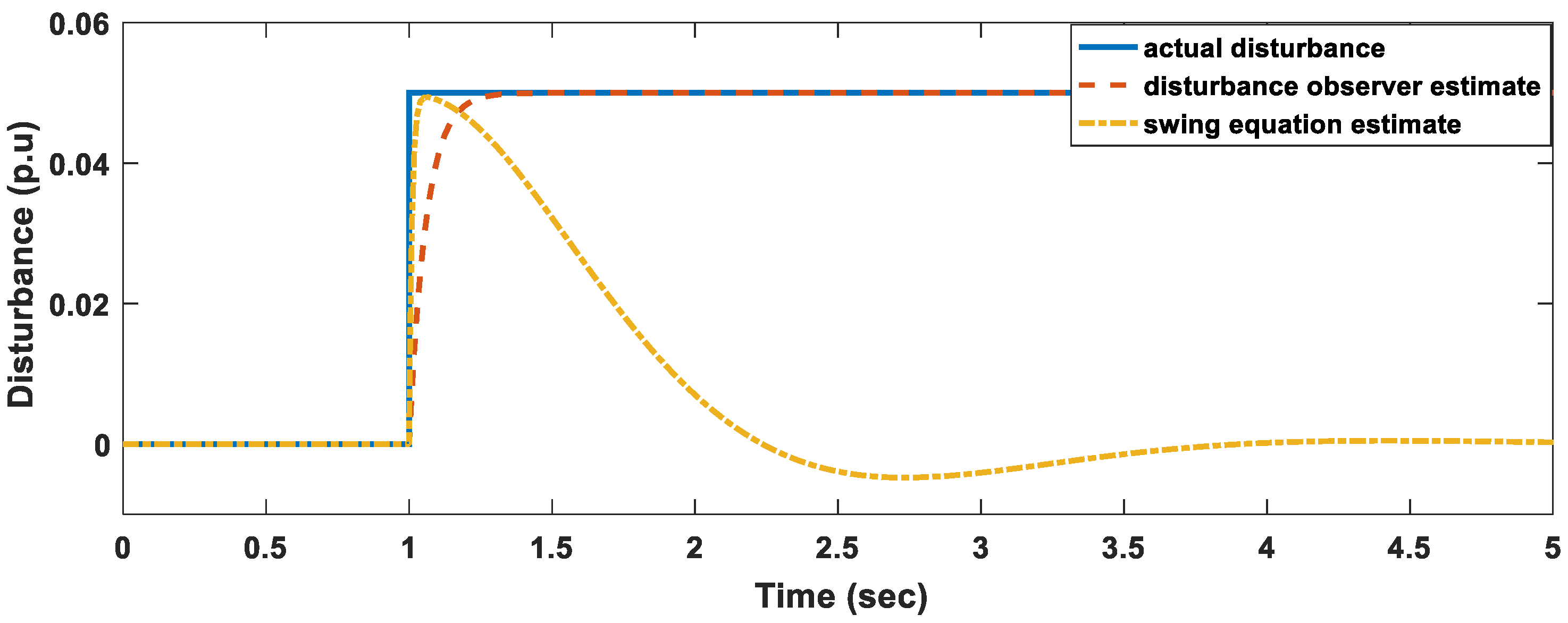
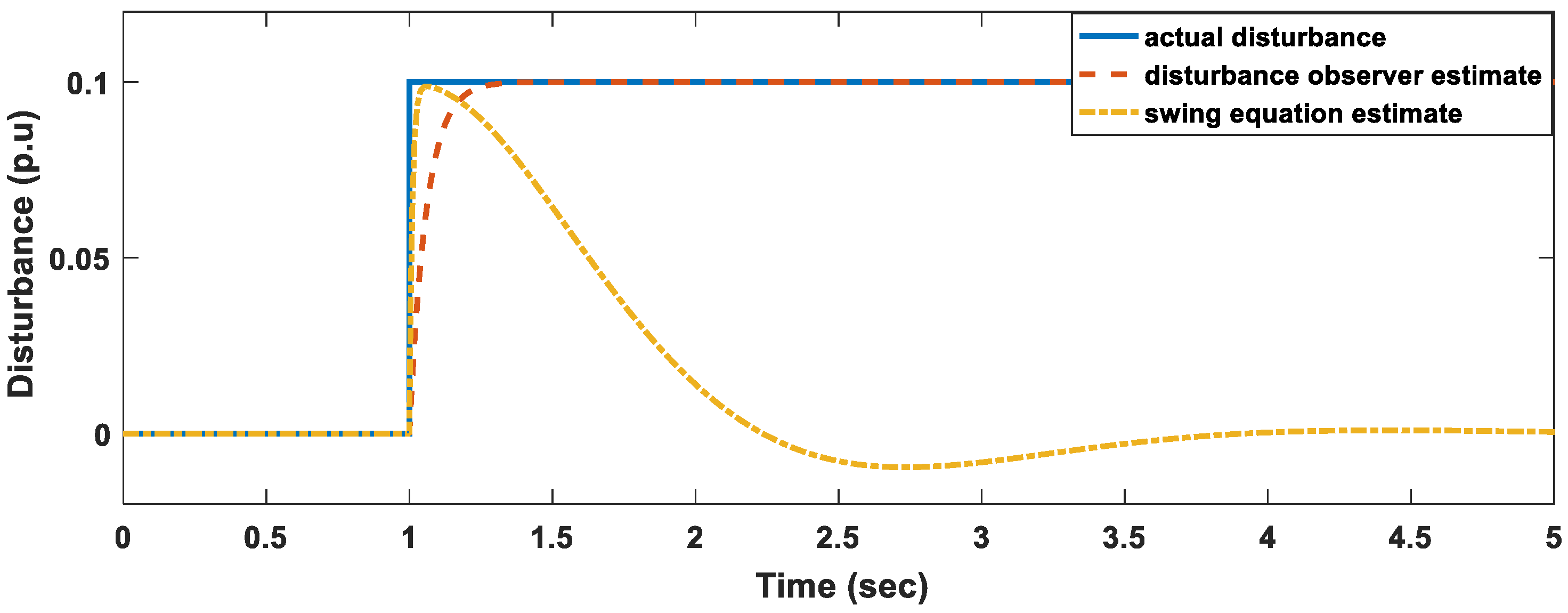
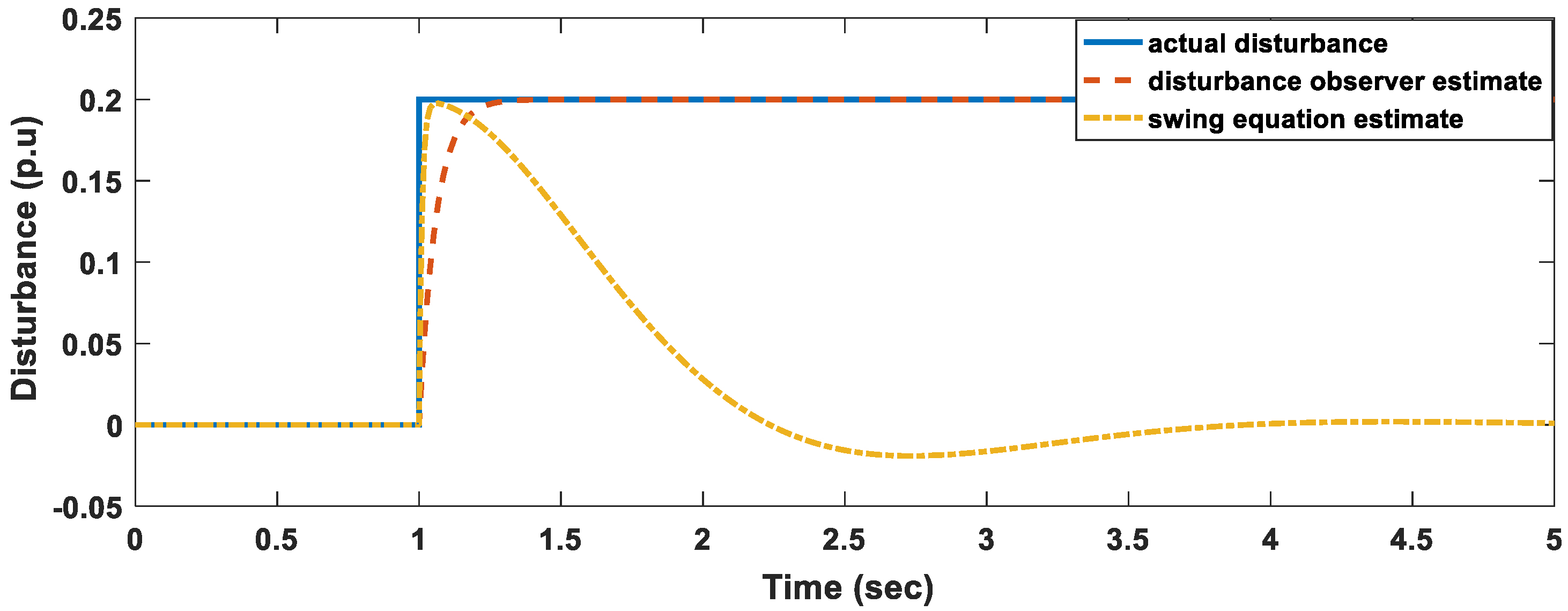
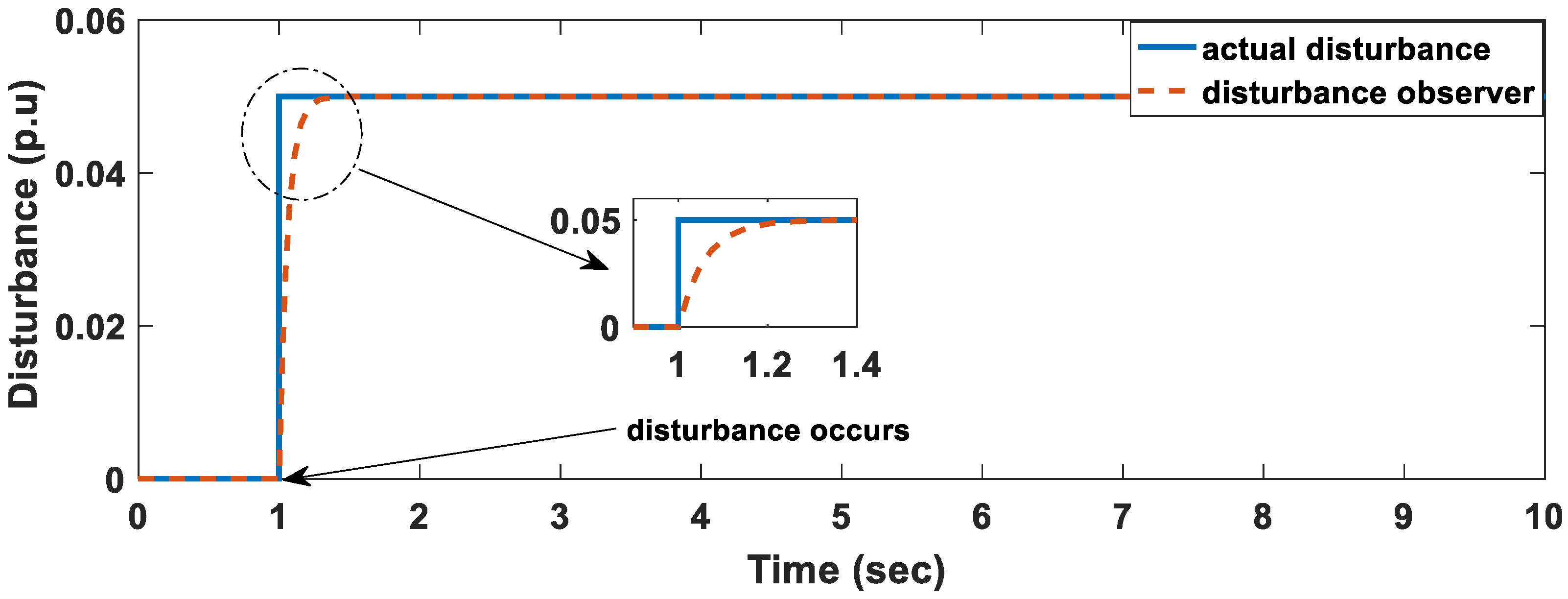
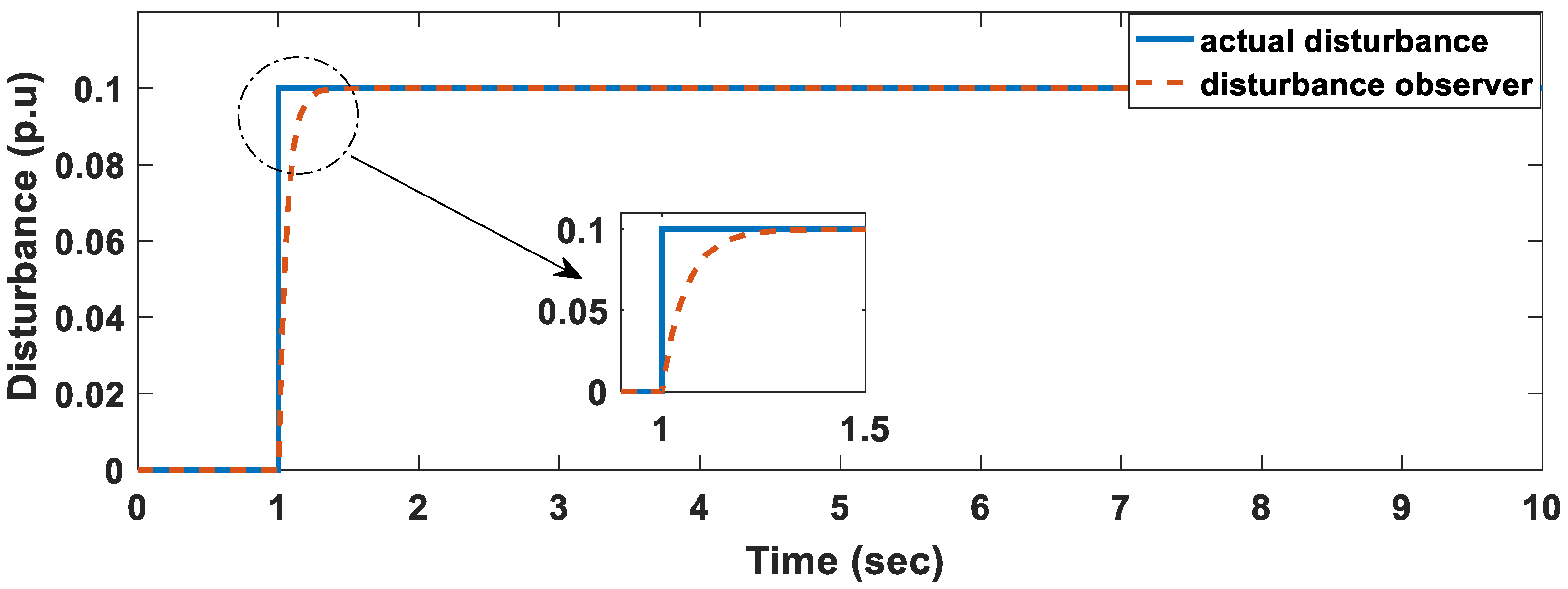
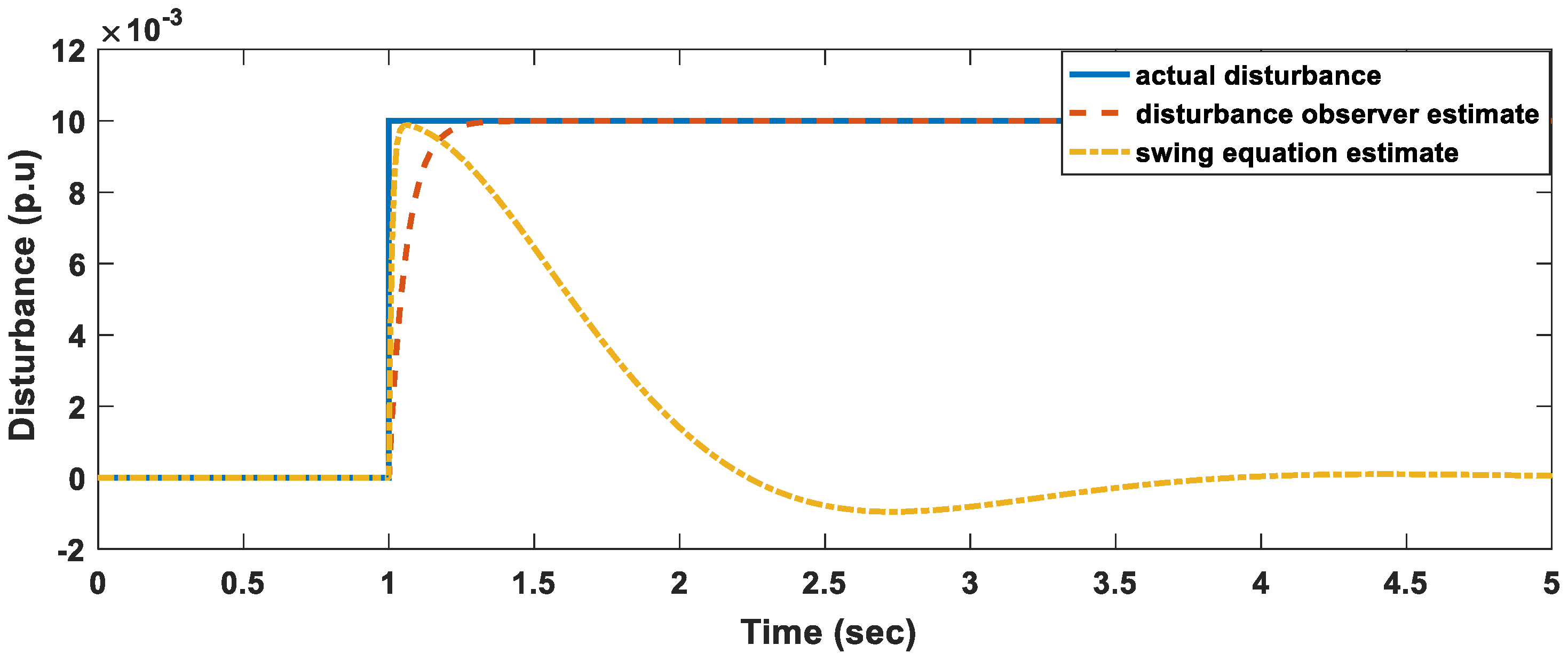
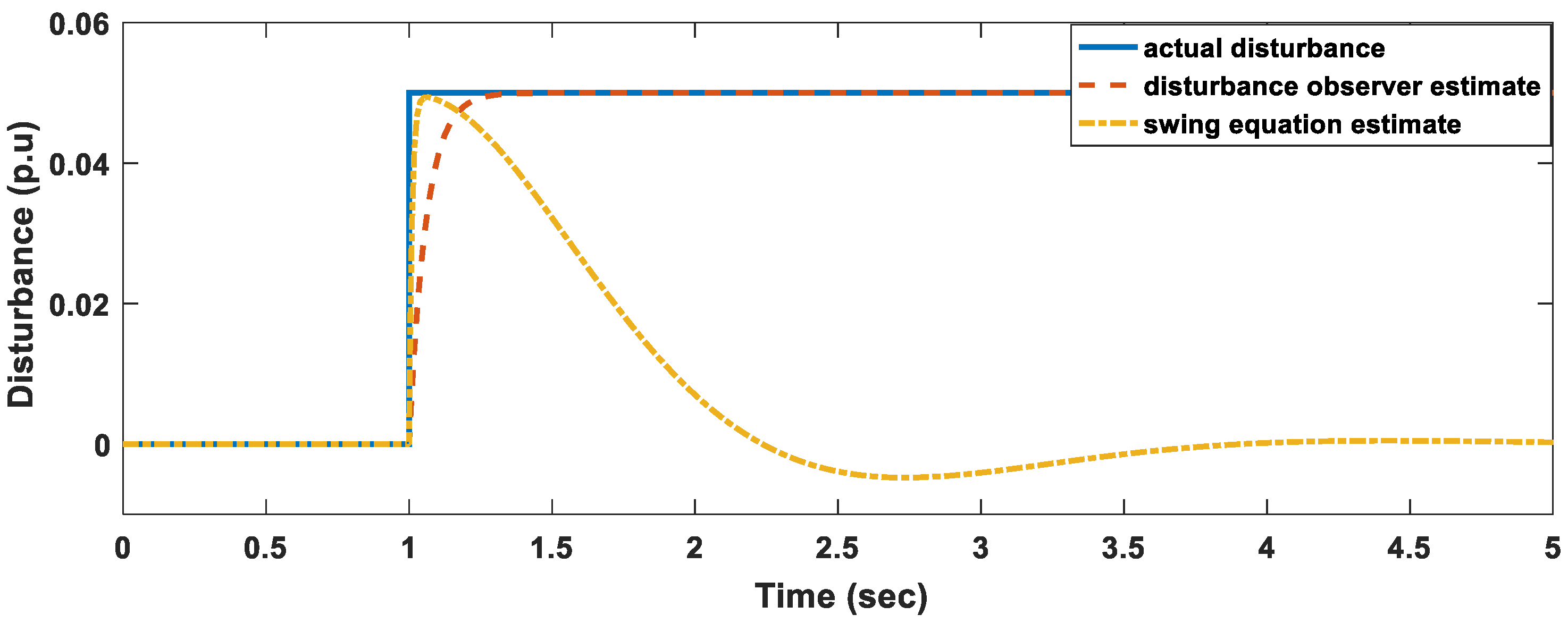
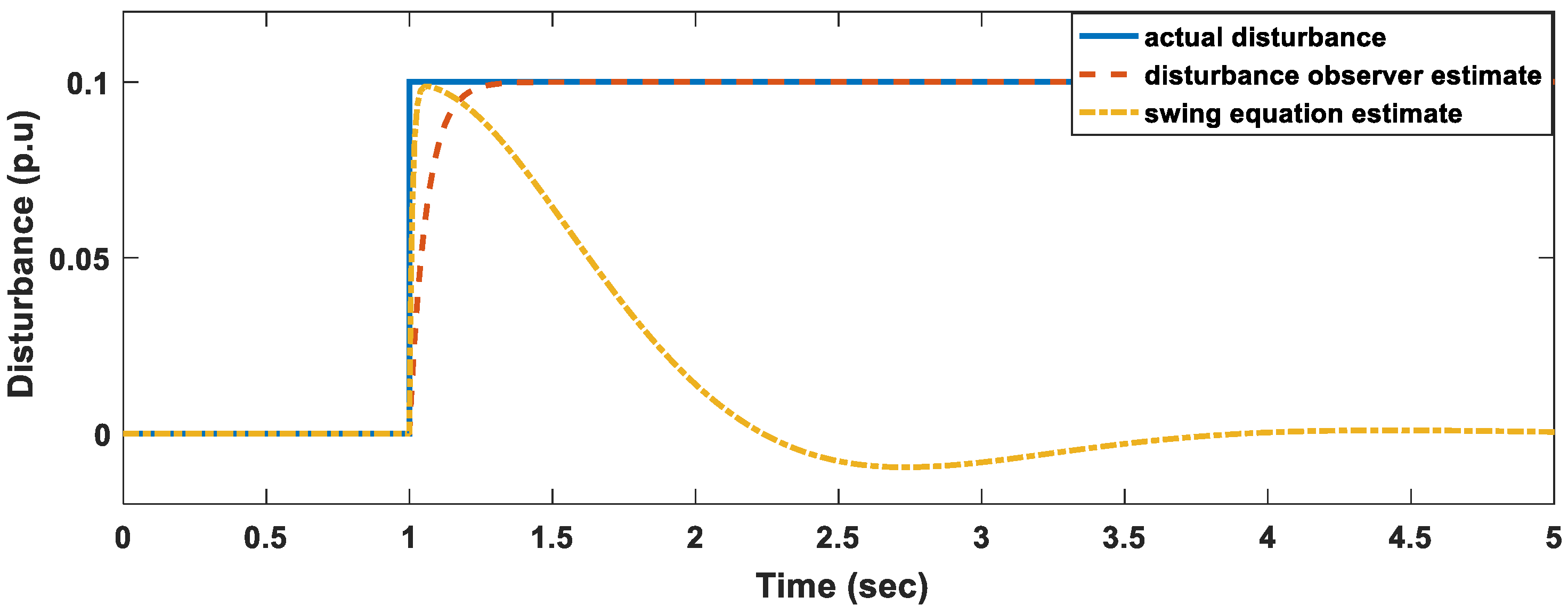
5.1. Disturbance Estimation for Single Area 2 Using the Disturbance Observer
- Disturbance 1: a small disturbance (0.01 p.u),
- Disturbance 2: a medium disturbance (0.05 p.u),
- Disturbance 3: a large disturbance (0.1 p.u).
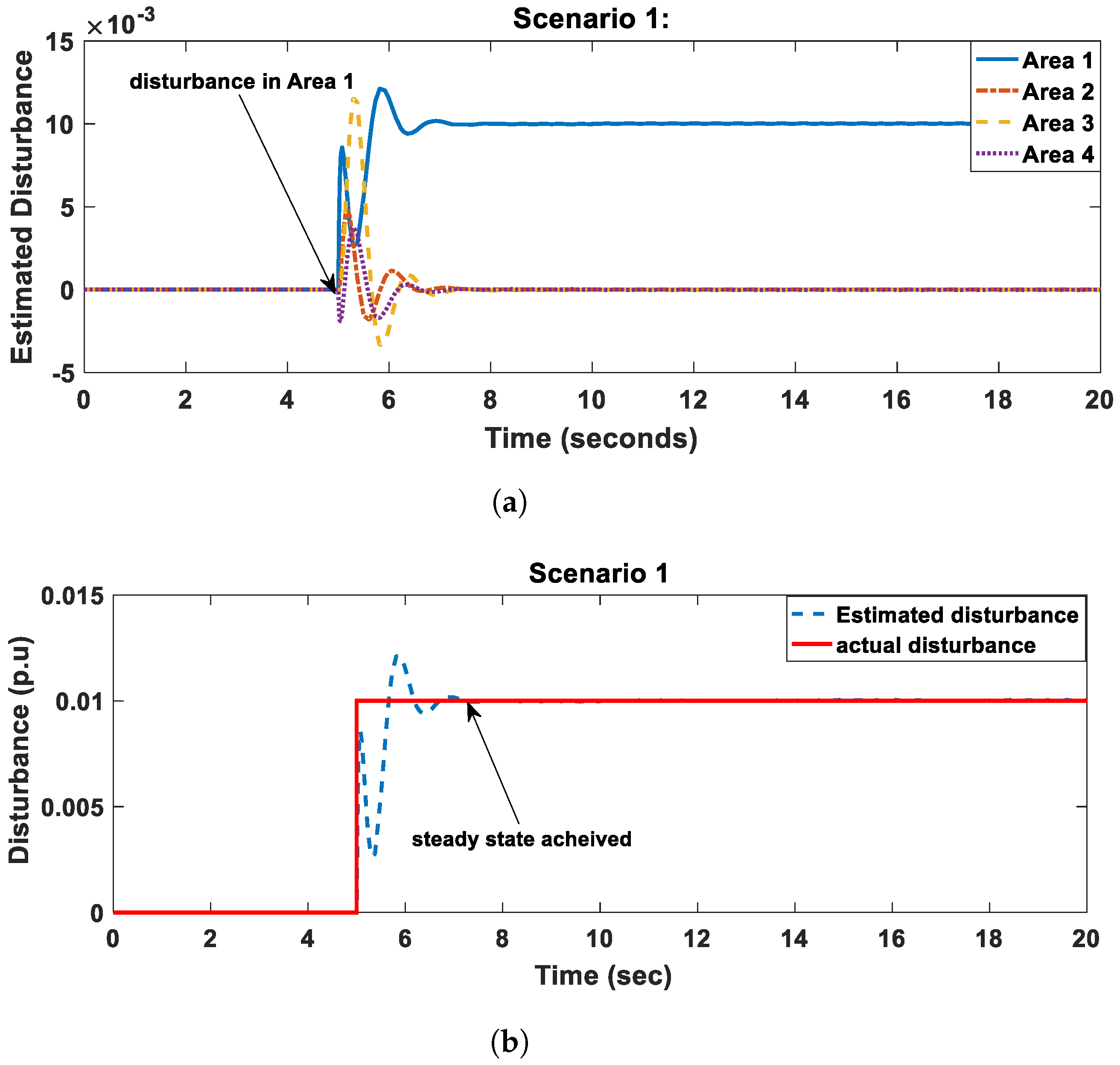
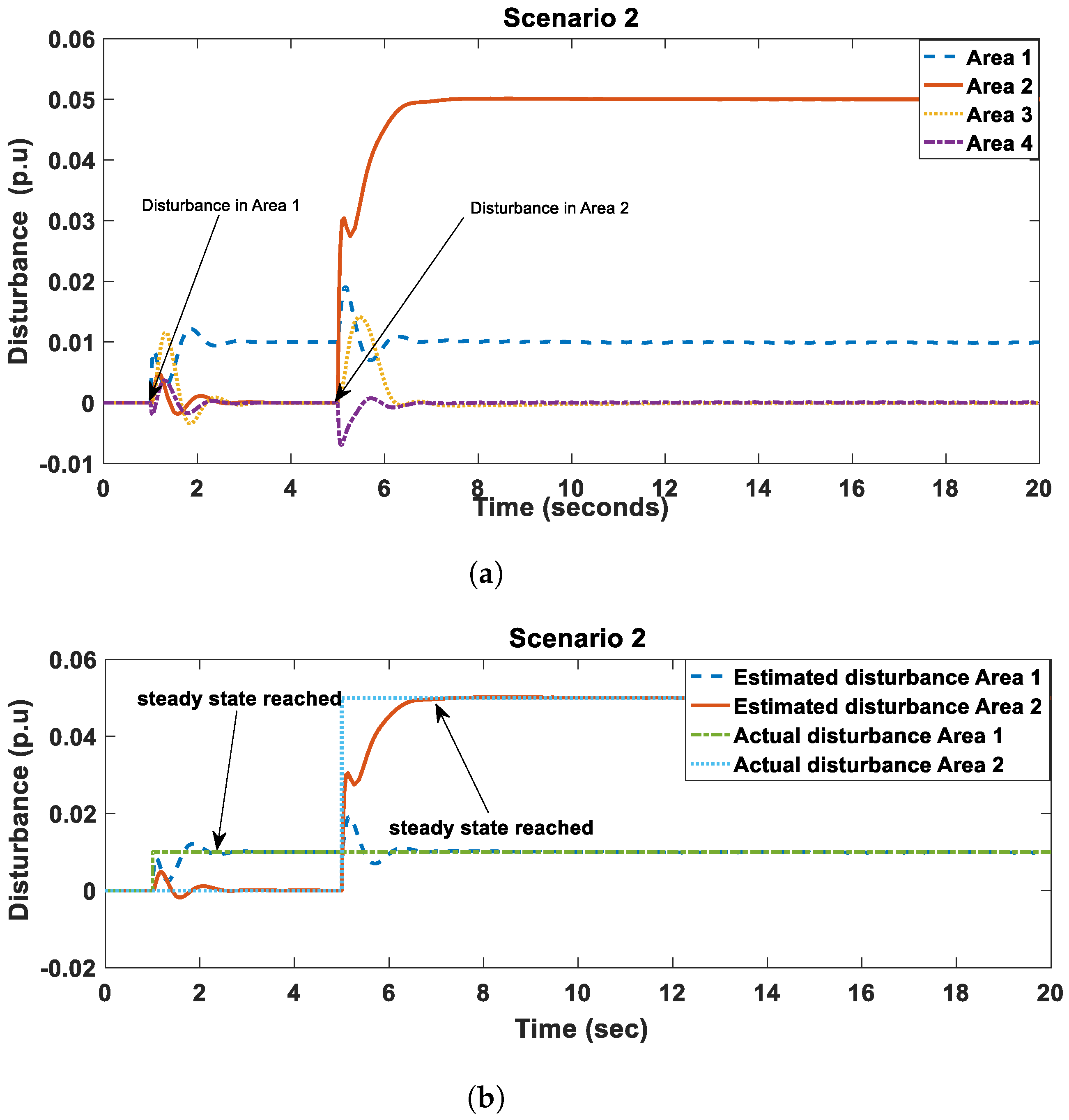
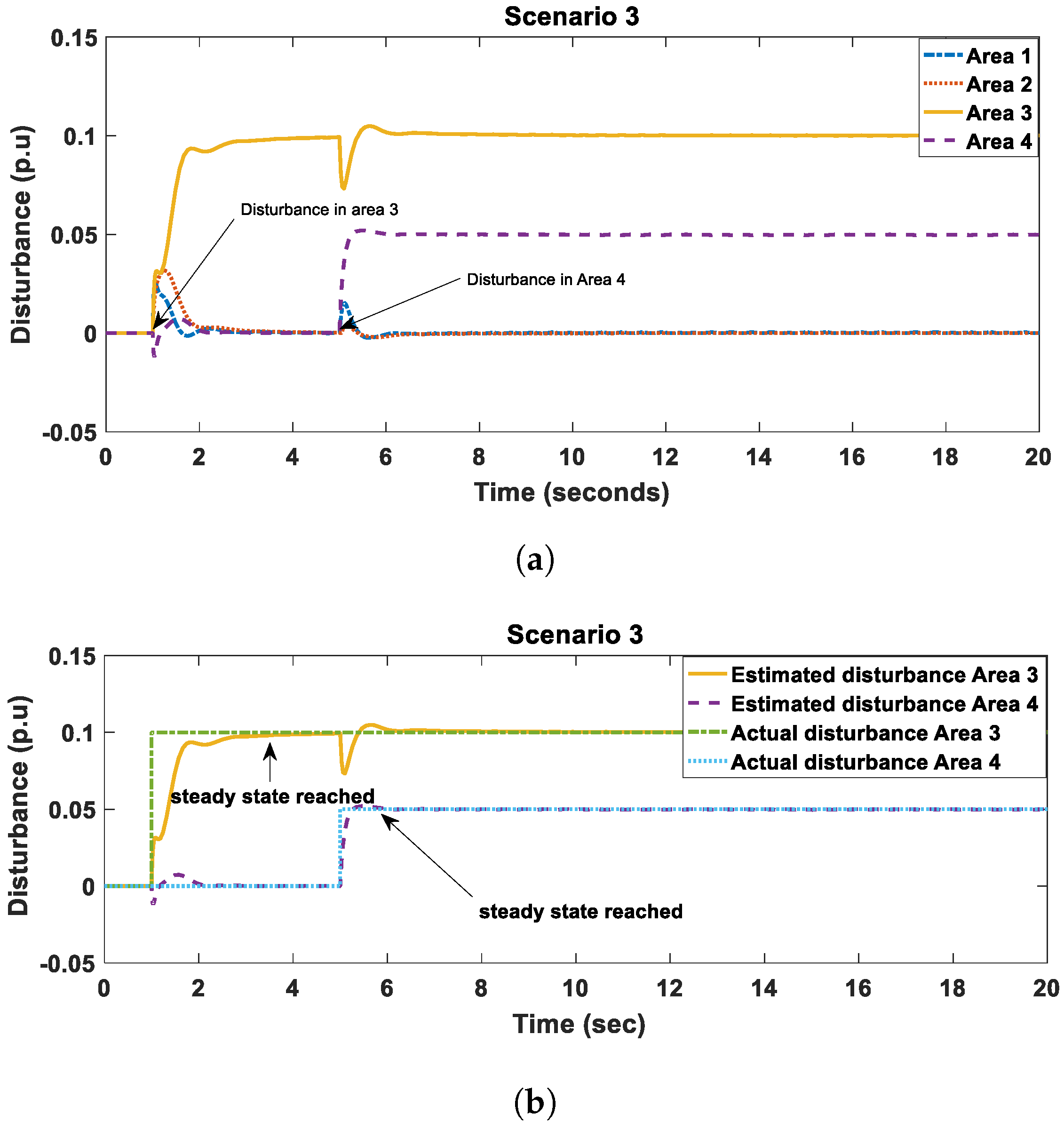
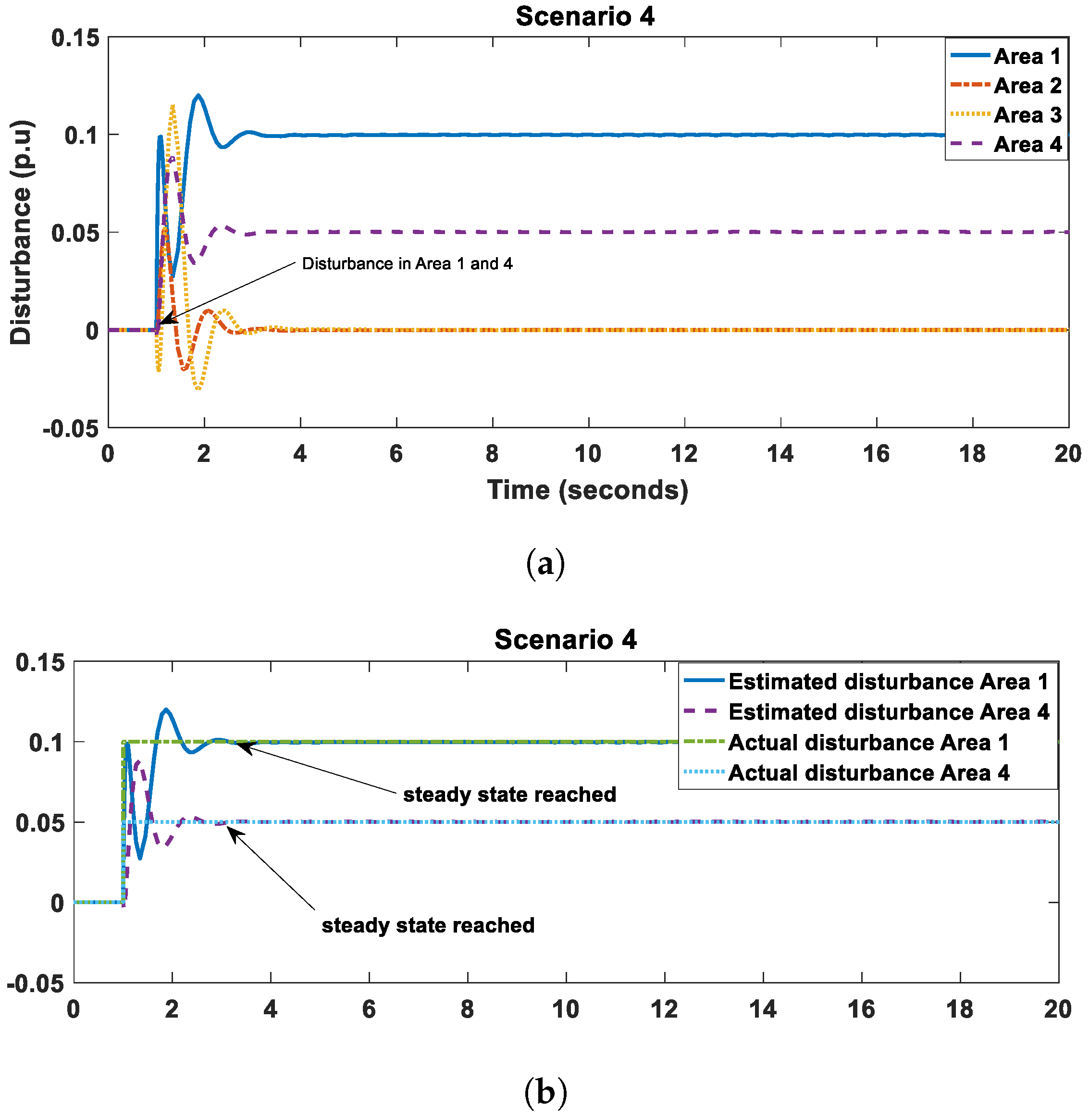
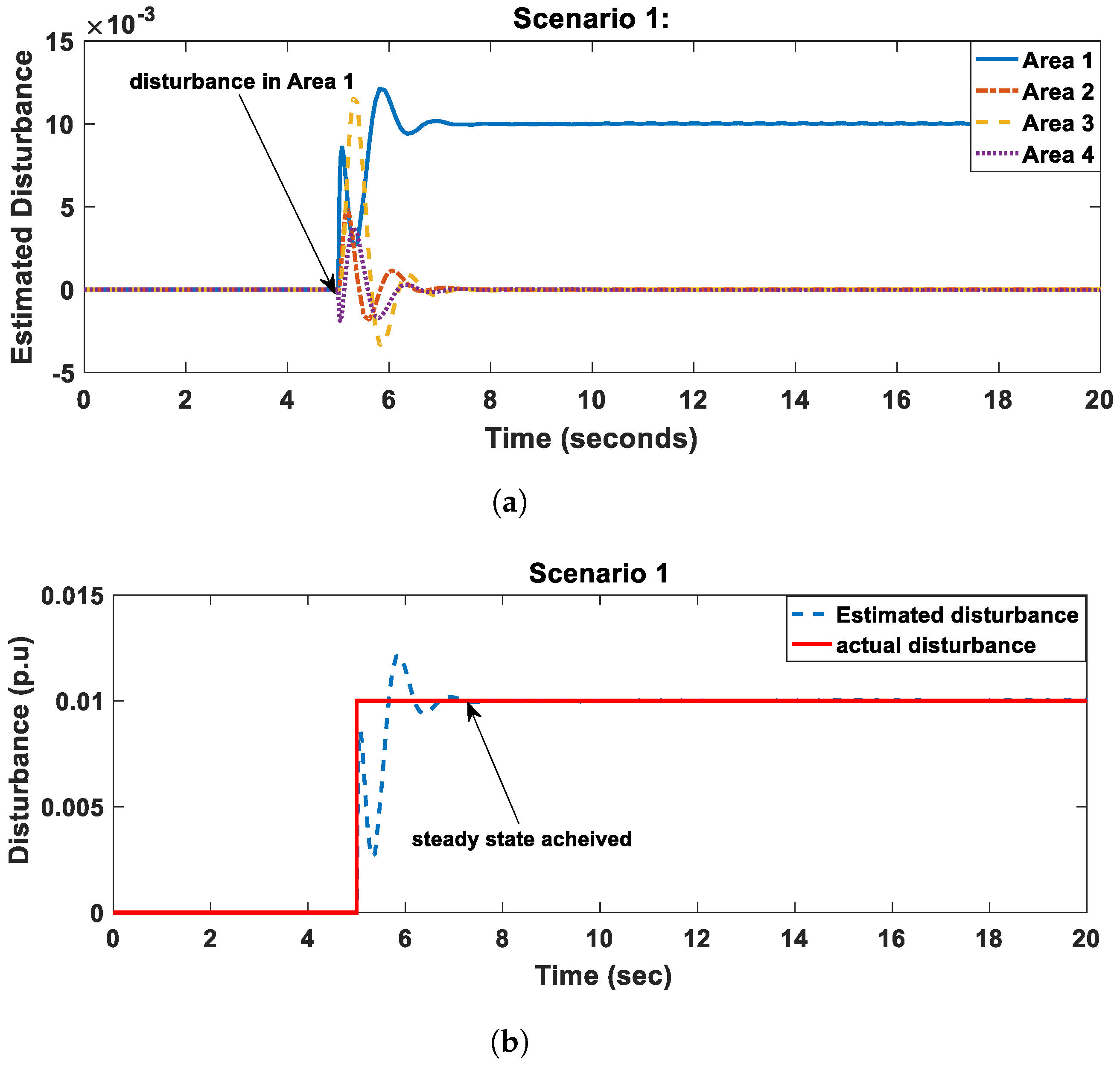
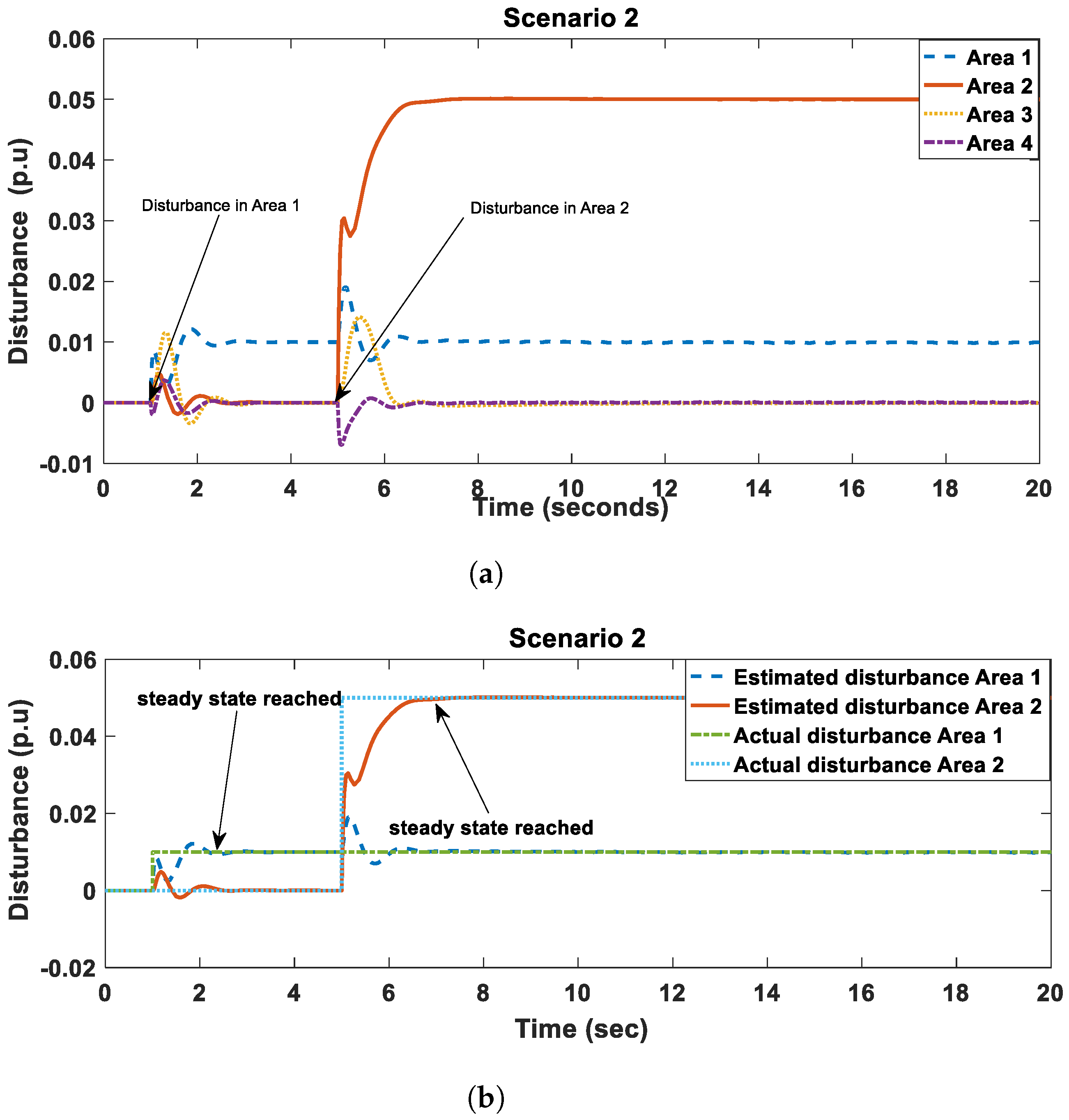
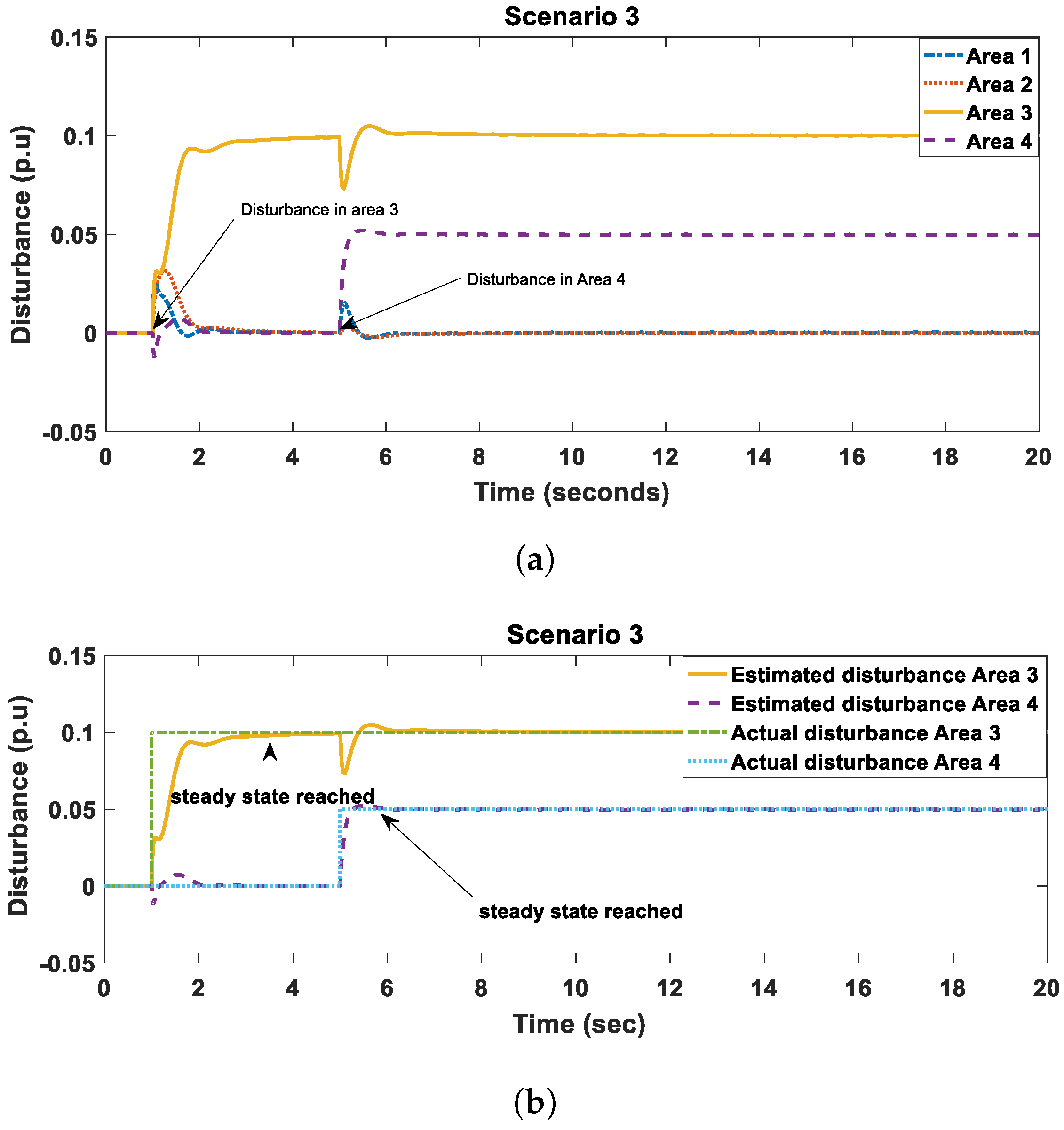
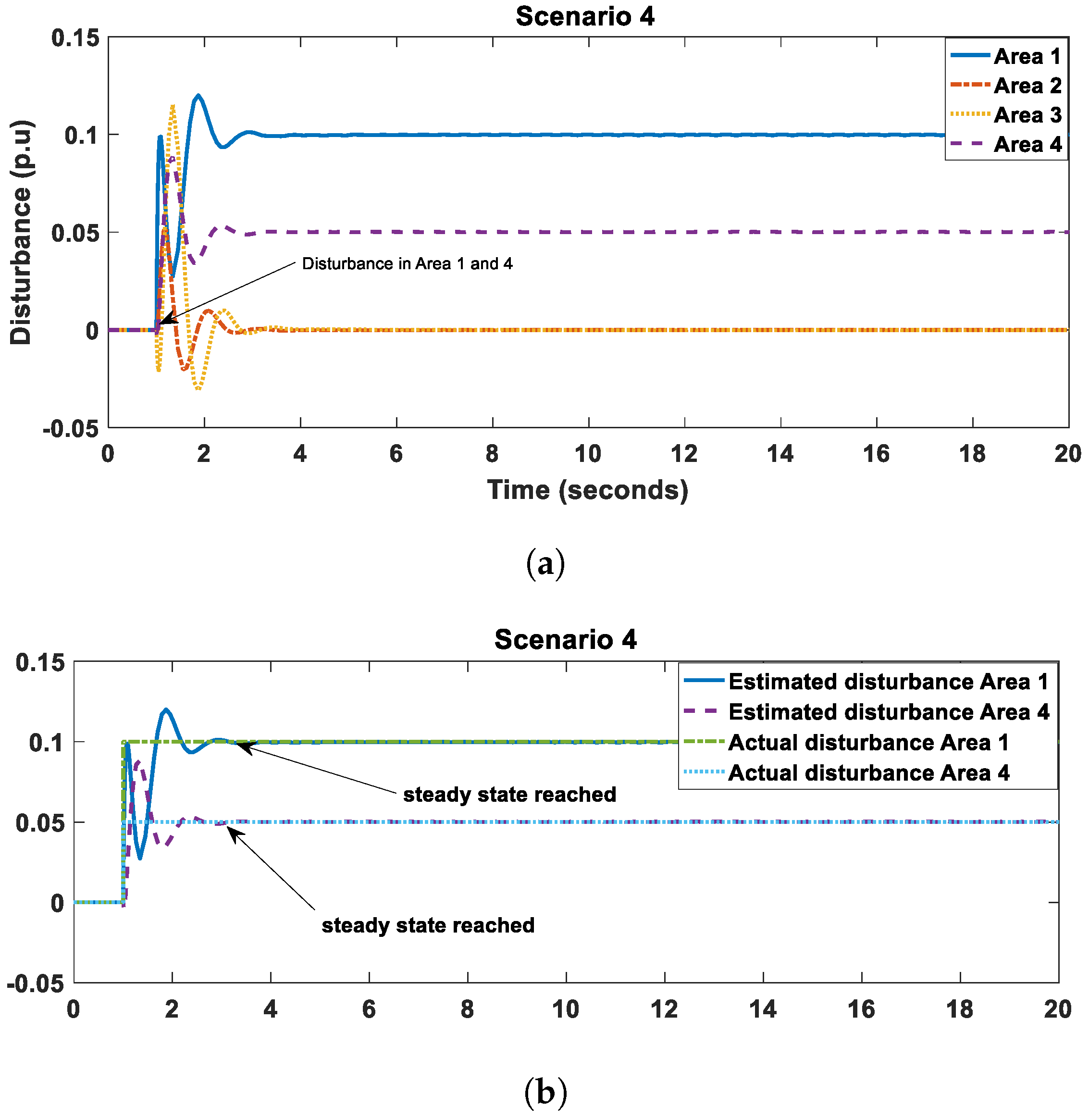
5.2. Disturbance Estimation for the Whole Combined Areas Using the Disturbance Observer
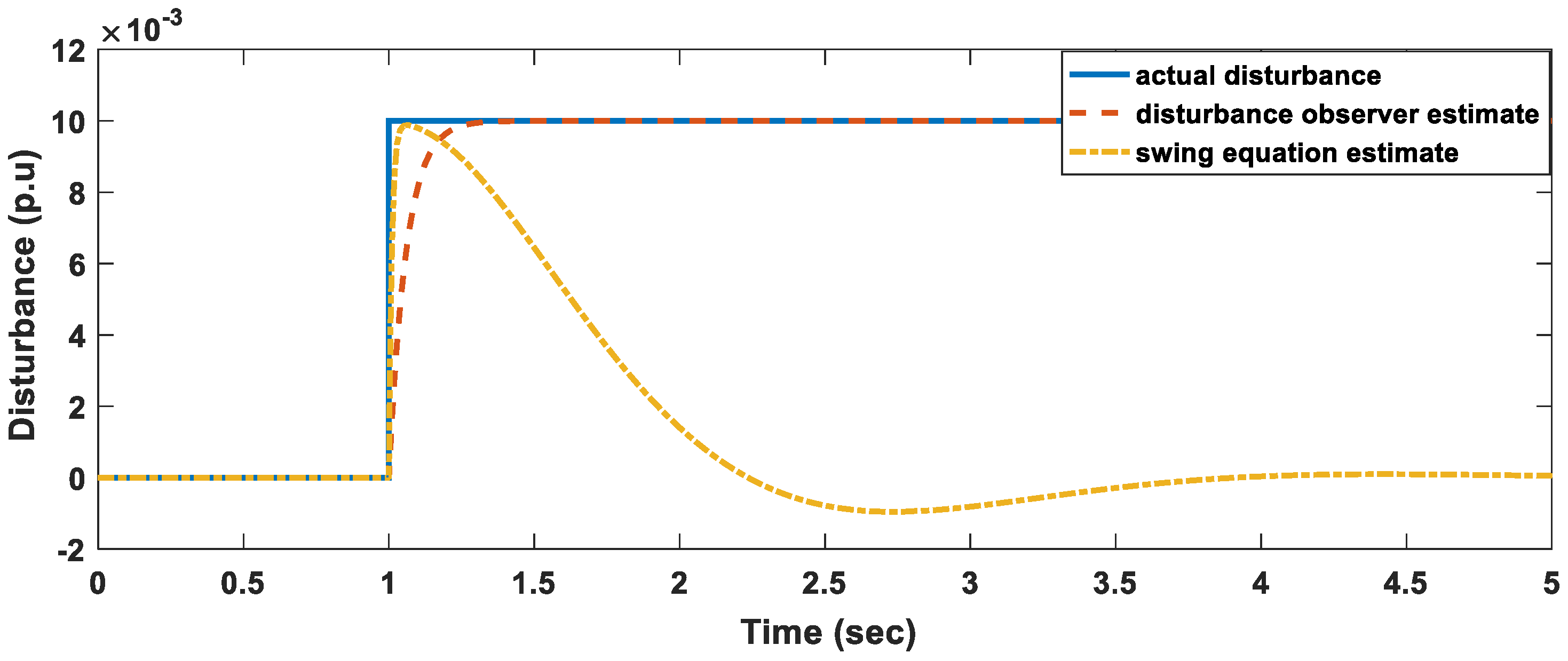
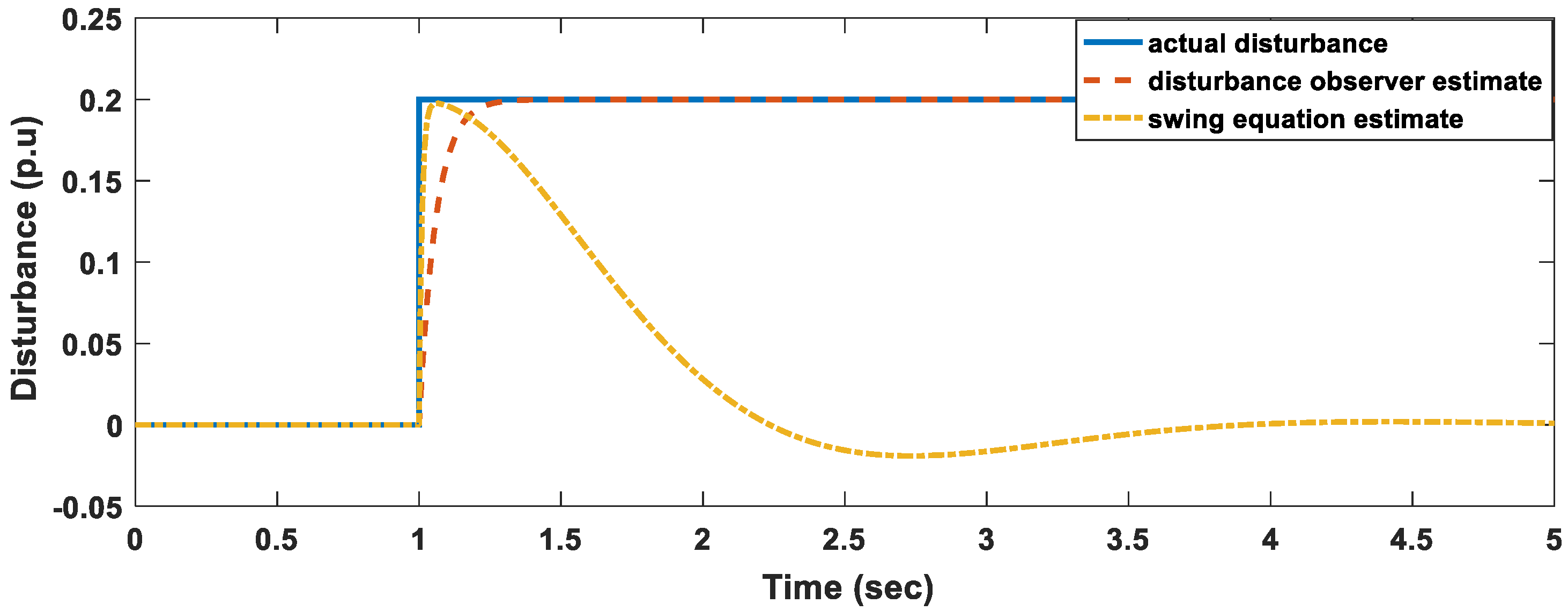
5.3. Comparison with the Existing Methods
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Laghari, J.; Mokhlis, H.; Bakar, A.; Mohamad, H. Application of computational intelligence techniques for load shedding in power systems: A review. Energy Convers. Manag. 2013, 75, 130–140. [Google Scholar] [CrossRef]
- Aik, D.L.H. A general-order system frequency response model incorporating load shedding: Analytic modeling and applications. IEEE Trans. Power Syst. 2006, 21, 709–717. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Golshan, M.; Fini, M.H. Wind Driven Optimization Algorithm Application to Load Frequency Control in Interconnected Power Systems Considering GRC and GDB Nonlinearities. Electr. Power Compon. Syst. 2018. [Google Scholar] [CrossRef]
- Fini, M.H.; Yousefi, G.R.; Alhelou, H.H. Comparative study on the performance of many-objective and single-objective optimisation algorithms in tuning load frequency controllers of multi-area power systems. IET Gener. Transm. Distrib. 2016, 10, 2915–2923. [Google Scholar] [CrossRef]
- Jones, J.R.; Kirkland, W.D. Computer algorithm for selection of frequency relays for load shedding. IEEE Comput. Appl. Power 1988, 1, 21–25. [Google Scholar] [CrossRef]
- Wu, C.; Chen, N. Frequency-based method for fast-response reserve dispatch in isolated power systems. IEE Proc. Gener. Transm. Distrib. 2004, 151, 73–77. [Google Scholar] [CrossRef]
- Anderson, P.M.; Fouad, A.A. Power System Control and Stability; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Alhelou, H.; Hamedani-Golshan, M.E.; Zamani, R.; Heydarian-Forushani, E.; Siano, P. Challenges and Opportunities of Load Frequency Control in Conventional, Modern and Future Smart Power Systems: A Comprehensive Review. Energies 2018, 11, 2497. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Golshan, M. Hierarchical plug-in EV control based on primary frequency response in interconnected smart grid. In Proceedings of the 2016 24th Iranian Conference on Electrical Engineering (ICEE), Shiraz, Iran, 10–12 May 2016; pp. 561–566. [Google Scholar]
- Alhelou, H.S.H.; Golshan, M.; Fini, M.H. Multi agent electric vehicle control based primary frequency support for future smart micro-grid. In Proceedings of the Smart Grid Conference (SGC), Tehran, Iran, 22–23 December 2015; pp. 22–27. [Google Scholar]
- Alhelou, H.H. Fault Detection and Isolation in Power Systems Using Unknown Input Observer. In Advanced Condition Monitoring and Fault Diagnosis of Electric Machines; IGI Global: Hershey, PA, USA, 2018; p. 38. [Google Scholar]
- Alhelou, H.H.; Golshan, M.H.; Askari-Marnani, J. Robust sensor fault detection and isolation scheme for interconnected smart power systems in presence of RER and EVs using unknown input observer. Int. J. Electr. Power Energy Syst. 2018, 99, 682–694. [Google Scholar] [CrossRef]
- Zamani, R.; Hamedani-Golshan, M.E.; Alhelou, H.H.; Siano, P.; Pota, H.R. Islanding detection of synchronous distributed generator based on the active and reactive power control loops. Energies 2018, 11, 2819. [Google Scholar] [CrossRef]
- Jallad, J.; Mekhilef, S.; Mokhlis, H.; Laghari, J.A. Improved UFLS with consideration of power deficit during shedding process and flexible load selection. IET Renew. Power Gener. 2018, 12, 565–575. [Google Scholar] [CrossRef]
- Terzija, V.V. Adaptive underfrequency load shedding based on the magnitude of the disturbance estimation. IEEE Trans. Power Syst. 2006, 21, 1260–1266. [Google Scholar] [CrossRef]
- Rudez, U.; Mihalic, R. Monitoring the first frequency derivative to improve adaptive underfrequency load-shedding schemes. IEEE Trans. Power Syst. 2011, 26, 839–846. [Google Scholar] [CrossRef]
- Ketabi, A.; Fini, M.H. An underfrequency load shedding scheme for hybrid and multiarea power systems. IEEE Trans. Smart Grid 2015, 6, 82–91. [Google Scholar] [CrossRef]
- Tofis, Y.; Timotheou, S.; Kyriakides, E. Minimal load shedding using the swing equation. IEEE Trans. Power Syst. 2017, 32, 2466–2467. [Google Scholar] [CrossRef]
- Alhelou, H.H. An Overview of Wide Area Measurement System and Its Application in Modern Power Systems. In Handbook of Research on Smart Power System Operation and Control; IGI Global: Hershey, PA, USA, 2019; pp. 289–307. [Google Scholar]
- Alhelou, H.H. Under Frequency Load Shedding Techniques for Future Smart Power Systems. In Handbook of Research on Smart Power System Operation and Control; IGI Global: Hershey, PA, USA, 2019; pp. 188–202. [Google Scholar]
- Mahfoud, F.; Guzun, B.D.; Lazaroiu, G.C.; Alhelou, H.H. Power Quality of Electrical Power Systems. In Handbook of Research on Smart Power System Operation and Control; IGI Global: Hershey, PA, USA, 2019; pp. 265–288. [Google Scholar]
- Makdisie, C.; Haidar, B.; Alhelou, H.H. An Optimal Photovoltaic Conversion System for Future Smart Grids. In Handbook of Research on Power and Energy System Optimization; IGI Global: Hershey, PA, USA, 2018; pp. 601–657. [Google Scholar]
- Chang-Chien, L.R.; An, L.N.; Lin, T.W.; Lee, W.J. Incorporating demand response with spinning reserve to realize an adaptive frequency restoration plan for system contingencies. IEEE Trans. Smart Grid 2012, 3, 1145–1153. [Google Scholar] [CrossRef]
- Sattinger, W. Application of PMU measurements in Europe TSO approach and experience. In Proceedings of the 2011 IEEE Trondheim PowerTech, Trondheim, Norway, 19–23 June 2011; pp. 1–4. [Google Scholar]
- Hauer, J.F.; Mittelstadt, W.A.; Martin, K.E.; Burns, J.W.; Lee, H.; Pierre, J.W.; Trudnowski, D.J. Use of the WECC WAMS in wide-area probing tests for validation of system performance and modeling. IEEE Trans. Power Syst. 2009, 24, 250–257. [Google Scholar] [CrossRef]
- Terzija, V.V.; Valverde, G.; Cai, D.; Regulski, P.; Madani, V.; Fitch, J.; Skok, S.; Begovic, M.; Phadke, A.G. Wide-area monitoring, protection, and control of future electric power networks. Proc. IEEE 2011, 99, 80–93. [Google Scholar] [CrossRef]
- Hauer, J.; Hughes, F.J.; Trudnowski, D.; Rogers, G.; Pierre, J.; Scharf, L.; Litzenberger, W. A Dynamic Information Manager for Networked Monitoring of Large Power Systems; EPRI Report TR-112031; BPA and PNNL: Palo Alto, CA, USA, 1999. [Google Scholar]
- Kamwa, I.; Grondin, R. PMU configuration for system dynamic performance measurement in large, multiarea power systems. IEEE Trans. Power Syst. 2002, 17, 385–394. [Google Scholar] [CrossRef]
- Zhong, Z.; Xu, C.; Billian, B.J.; Zhang, L.; Tsai, S.J.; Conners, R.W.; Centeno, V.A.; Phadke, A.G.; Liu, Y. Power system frequency monitoring network (FNET) implementation. IEEE Trans. Power Syst. 2005, 20, 1914–1921. [Google Scholar] [CrossRef]
- La Scala, M.; De Benedictis, M.; Bruno, S.; Grobovoy, A.; Bondareva, N.; Borodina, N.; Denisova, D.; Germond, A.; Cherkaoui, R. Development of applications in WAMS and WACS: An international cooperation experience. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; p. 10. [Google Scholar]
- Sarailoo, M.; Wu, N.E. Cost-Effective Upgrade of PMU Networks for Fault-Tolerant Sensing. IEEE Trans. Power Syst. 2018, 33, 3052–3063. [Google Scholar] [CrossRef]
- Liao, K.; Xu, Y. A robust load frequency control scheme for power systems based on second-order sliding mode and extended disturbance observer. IEEE Trans. Ind. Inform. 2018, 14, 3076–3086. [Google Scholar] [CrossRef]
- Machowski, J.; Janus, W.; Bumby, J.R. Power System Dynamics: Stability and Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Wang, G.; Xin, H.; Gan, D.; Li, N.; Wang, Z. An investigation into WAMS-based Under-frequency load shedding. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–7. [Google Scholar]
- Shi, Q.; Li, F.F.; Cui, H. Analytical Method to Aggregate Multi-Machine SFR Model with Applications in Power System Dynamic Studies. IEEE Trans. Power Syst. 2018, 33, 6355–6367. [Google Scholar] [CrossRef]
- Han, H.; Gao, S.; Shi, Q.; Cui, H.; Li, F. Security-based active demand response strategy considering uncertainties in power systems. IEEE Access 2017, 5, 16953–16962. [Google Scholar] [CrossRef]
- Liu, F.; Li, Y.; Cao, Y.; She, J.; Wu, M. A two-layer active disturbance rejection controller design for load frequency control of interconnected power system. IEEE Trans. Power Syst. 2016, 31, 3320–3321. [Google Scholar] [CrossRef]
- Singh, V.P.; Kishor, N.; Samuel, P. Distributed multi-agent system-based load frequency control for multi-area power system in smart grid. IEEE Trans. Ind. Electron. 2017, 64, 5151–5160. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area No | Tt | Tg | H | D |
|---|---|---|---|---|
| 1 | 0.4 | 0.08 | 0.08335 | 0.015 |
| 2 | 0.33 | 0.072 | 0.111 | 0.04 |
| 3 | 0.35 | 0.07 | 0.08 | 0.05 |
| 4 | 0.375 | 0.085 | 0.065 | 0.0667 |
| Scenario | Area#1 | Area#2 | Area#3 | Area#4 | ||||
|---|---|---|---|---|---|---|---|---|
| 0.1 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 0.01 | 1 | 0.05 | 5 | 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 0.1 | 1 | 0.05 | 5 | |
| 0.1 | 1 | 0 | 0 | 0 | 0 | 0.05 | 1 | |
| Scenario | Actual Disturbance | Estimated Disturbance | Error (%) |
|---|---|---|---|
| 0.01 | 0.009878 | 1.22 | |
| 0.05 | 0.049300 | 1.40 | |
| 0.1 | 0.098200 | 1.80 | |
| 0.2 | 0.196000 | 2.00 |
| Scenario | Actual Disturbance | Estimated Disturbance | Error (%) |
|---|---|---|---|
| 0.01 | 0.01 | 0 | |
| 0.05 | 0.05 | 0 | |
| 0.1 | 0.10 | 0 | |
| 0.2 | 0.20 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haes Alhelou, H.; Hamedani Golshan, M.E.; Njenda, T.C.; Siano, P. WAMS-Based Online Disturbance Estimation in Interconnected Power Systems Using Disturbance Observer. Appl. Sci. 2019, 9, 990. https://doi.org/10.3390/app9050990
Haes Alhelou H, Hamedani Golshan ME, Njenda TC, Siano P. WAMS-Based Online Disturbance Estimation in Interconnected Power Systems Using Disturbance Observer. Applied Sciences. 2019; 9(5):990. https://doi.org/10.3390/app9050990
Chicago/Turabian StyleHaes Alhelou, Hassan, Mohamad Esmail Hamedani Golshan, Takawira Cuthbert Njenda, and Pierluigi Siano. 2019. "WAMS-Based Online Disturbance Estimation in Interconnected Power Systems Using Disturbance Observer" Applied Sciences 9, no. 5: 990. https://doi.org/10.3390/app9050990
APA StyleHaes Alhelou, H., Hamedani Golshan, M. E., Njenda, T. C., & Siano, P. (2019). WAMS-Based Online Disturbance Estimation in Interconnected Power Systems Using Disturbance Observer. Applied Sciences, 9(5), 990. https://doi.org/10.3390/app9050990