Laboratory Observations of Repeated Interactions between Ruptures and the Fault Bend Prior to the Overall Stick-Slip Instability Based on a Digital Image Correlation Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
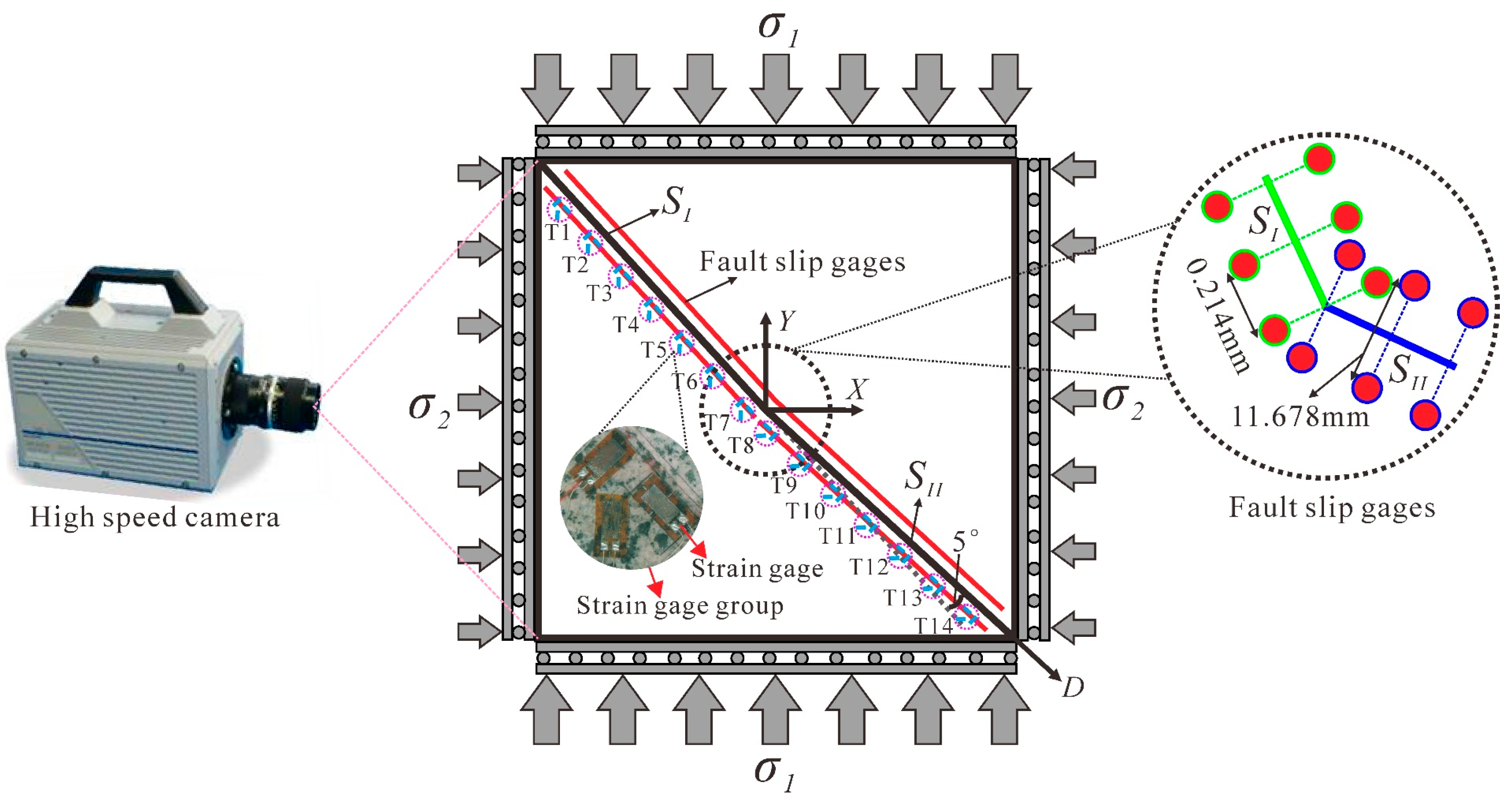
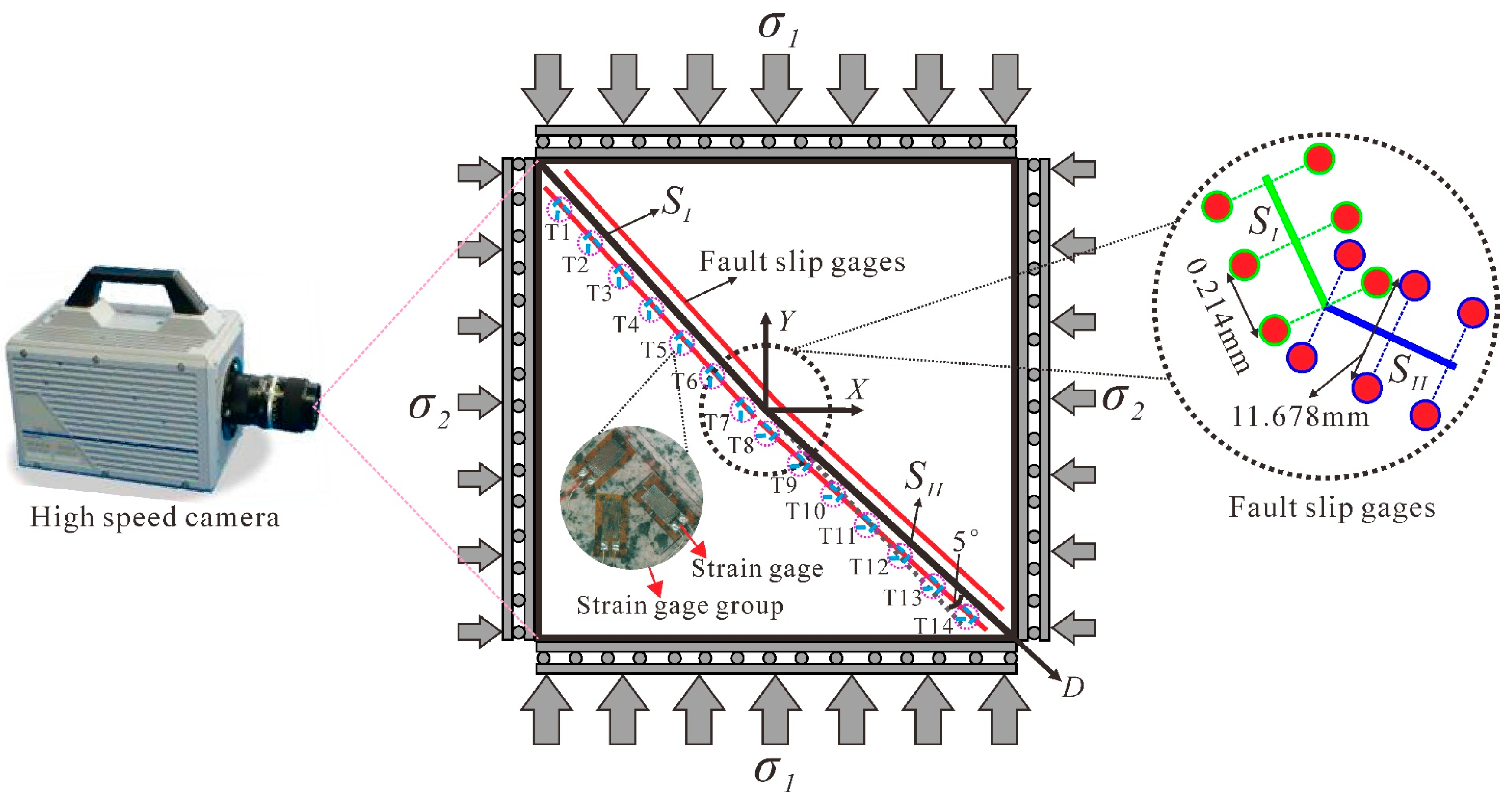
2.1. Sample and Loading Conditions
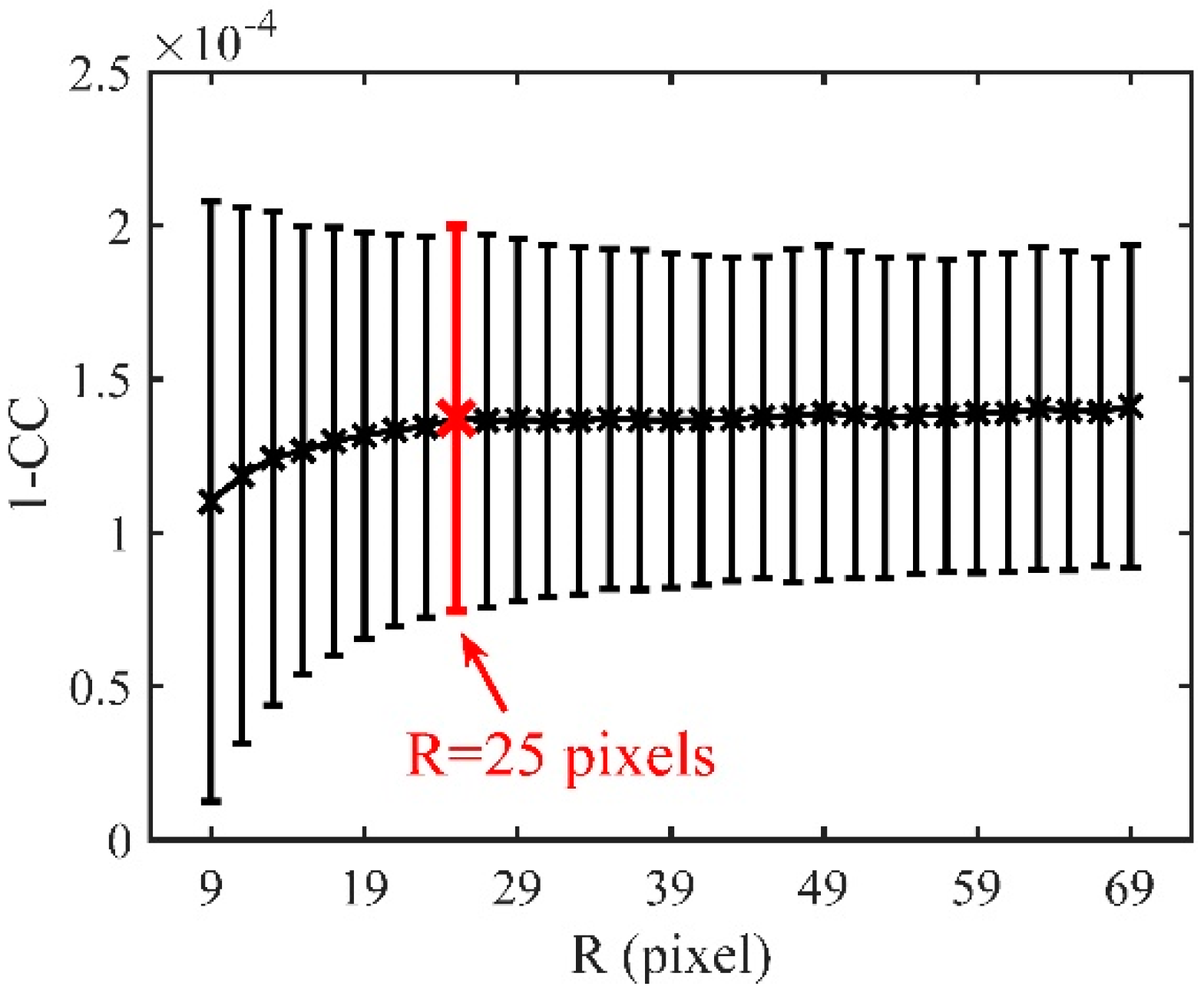
2.2. Digital Image Correlation Method to Observe Fault Slip
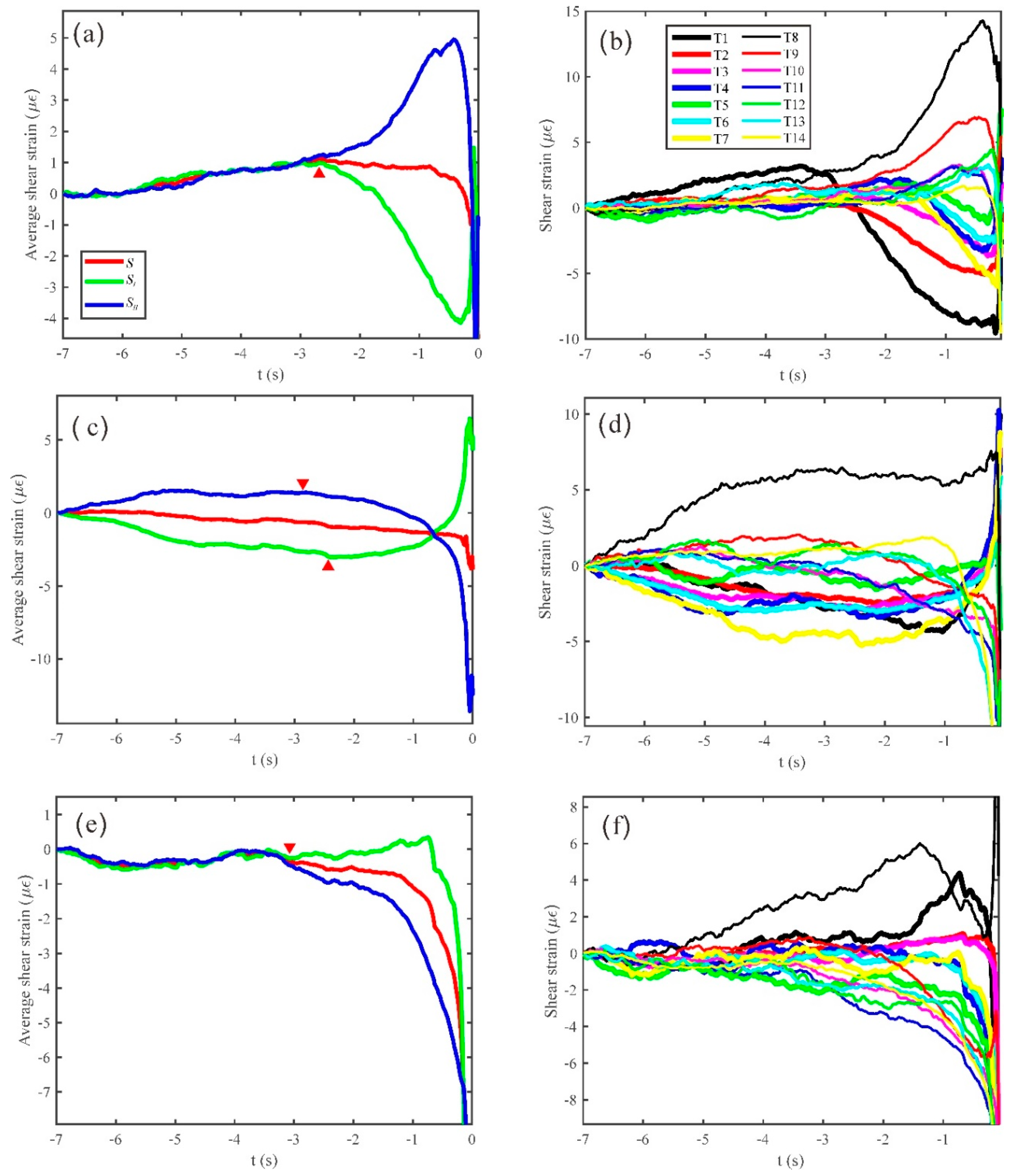
2.3. Strain Gage to Observe Shear Strain along the Fault
3. Results
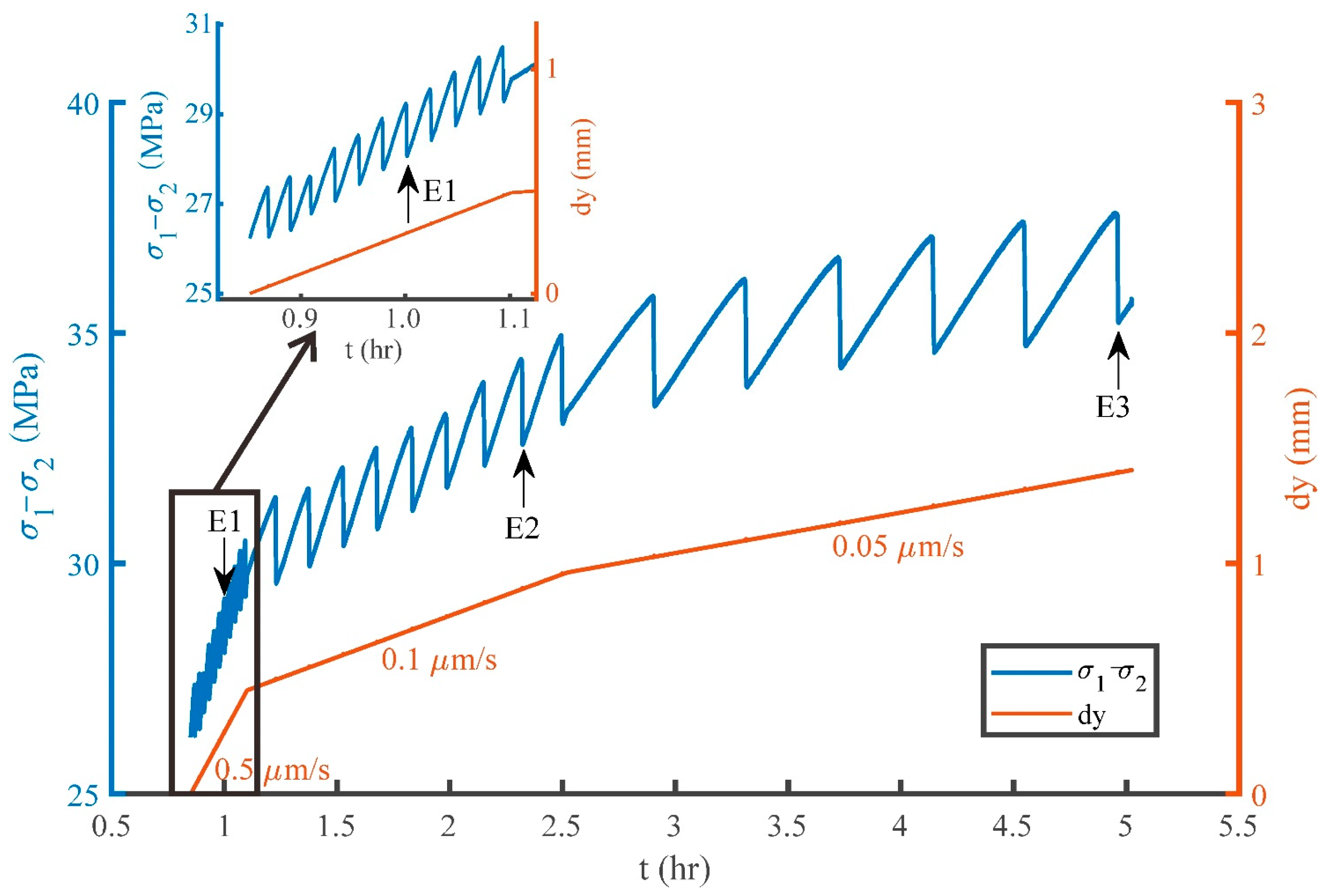
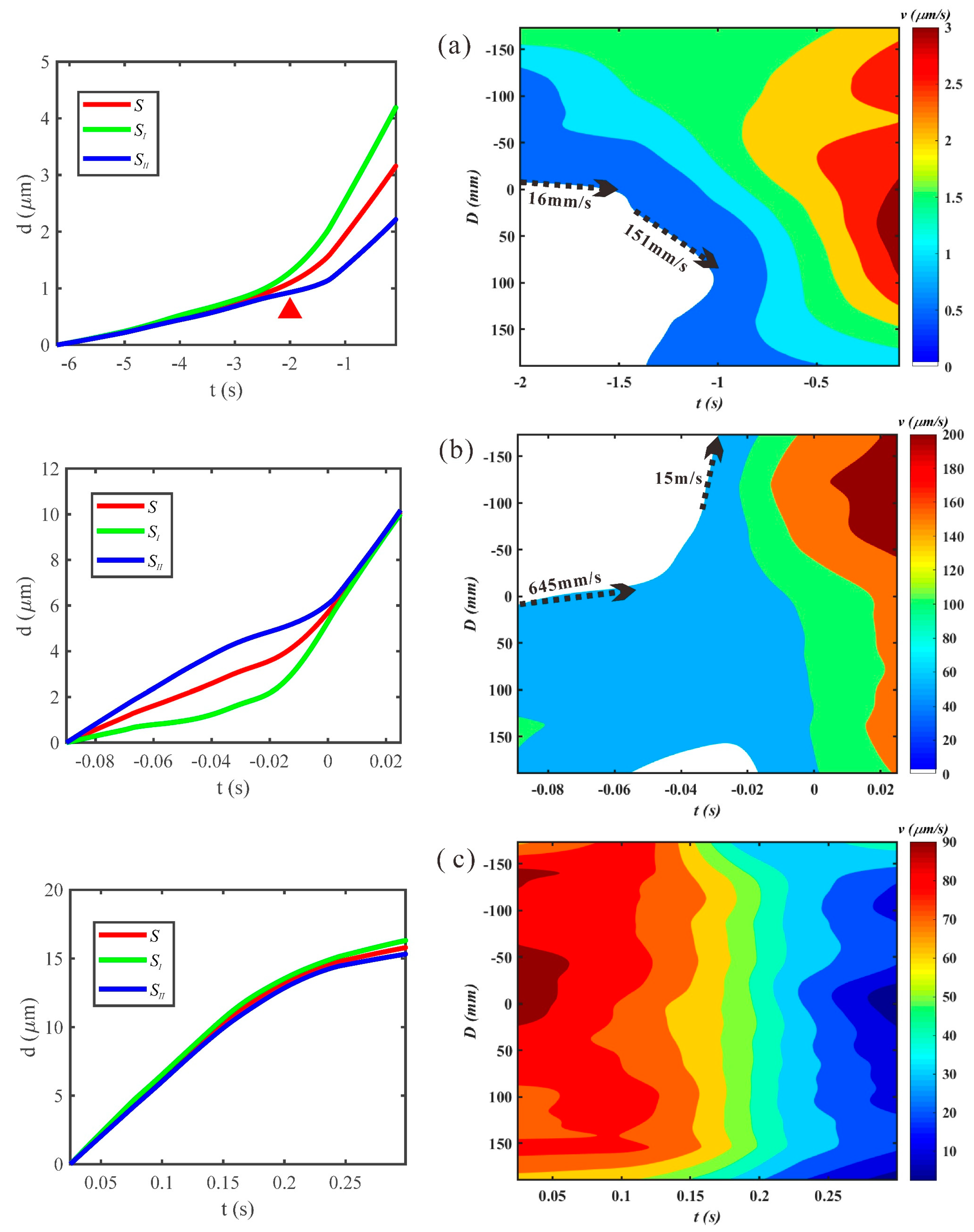
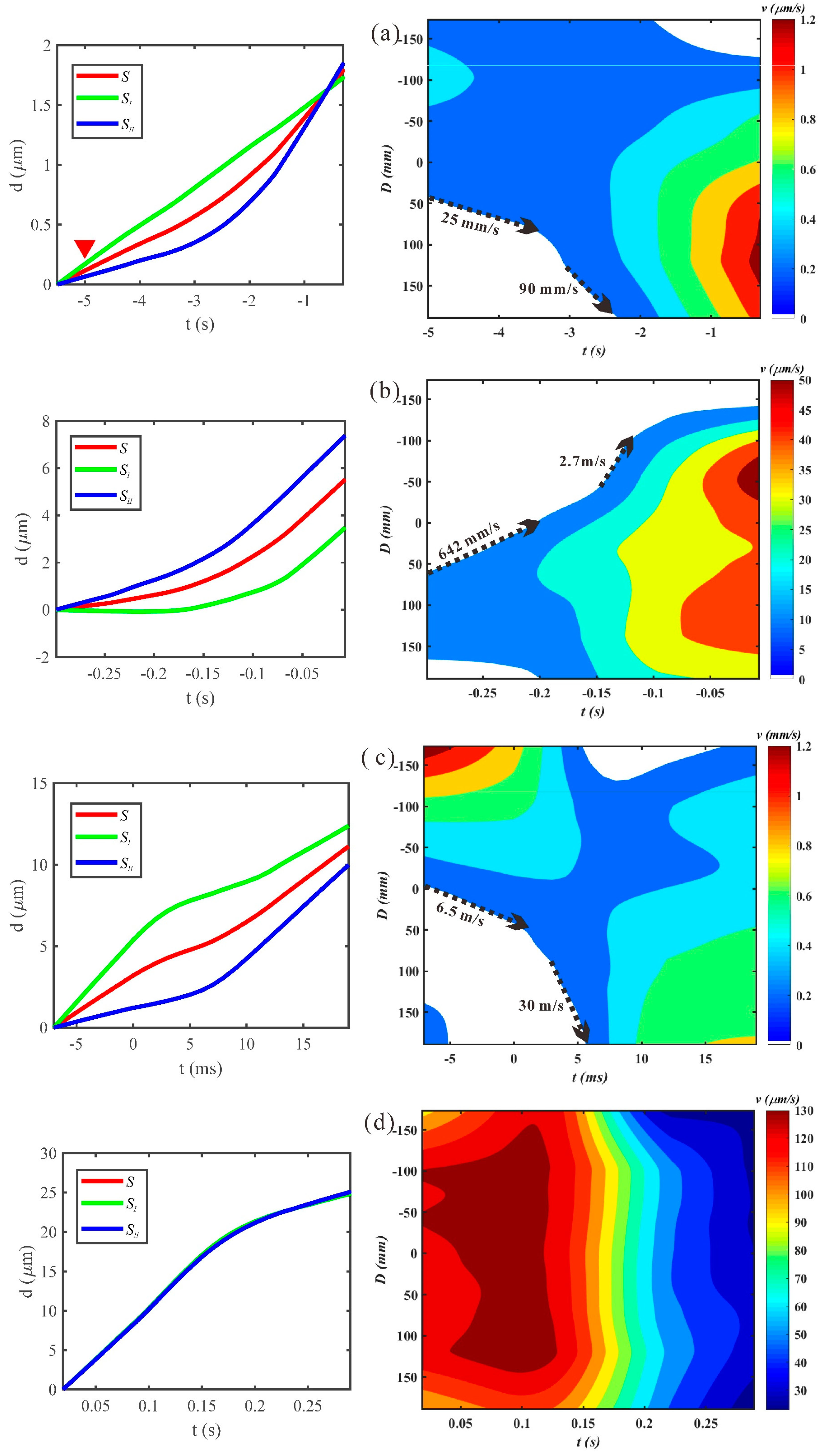
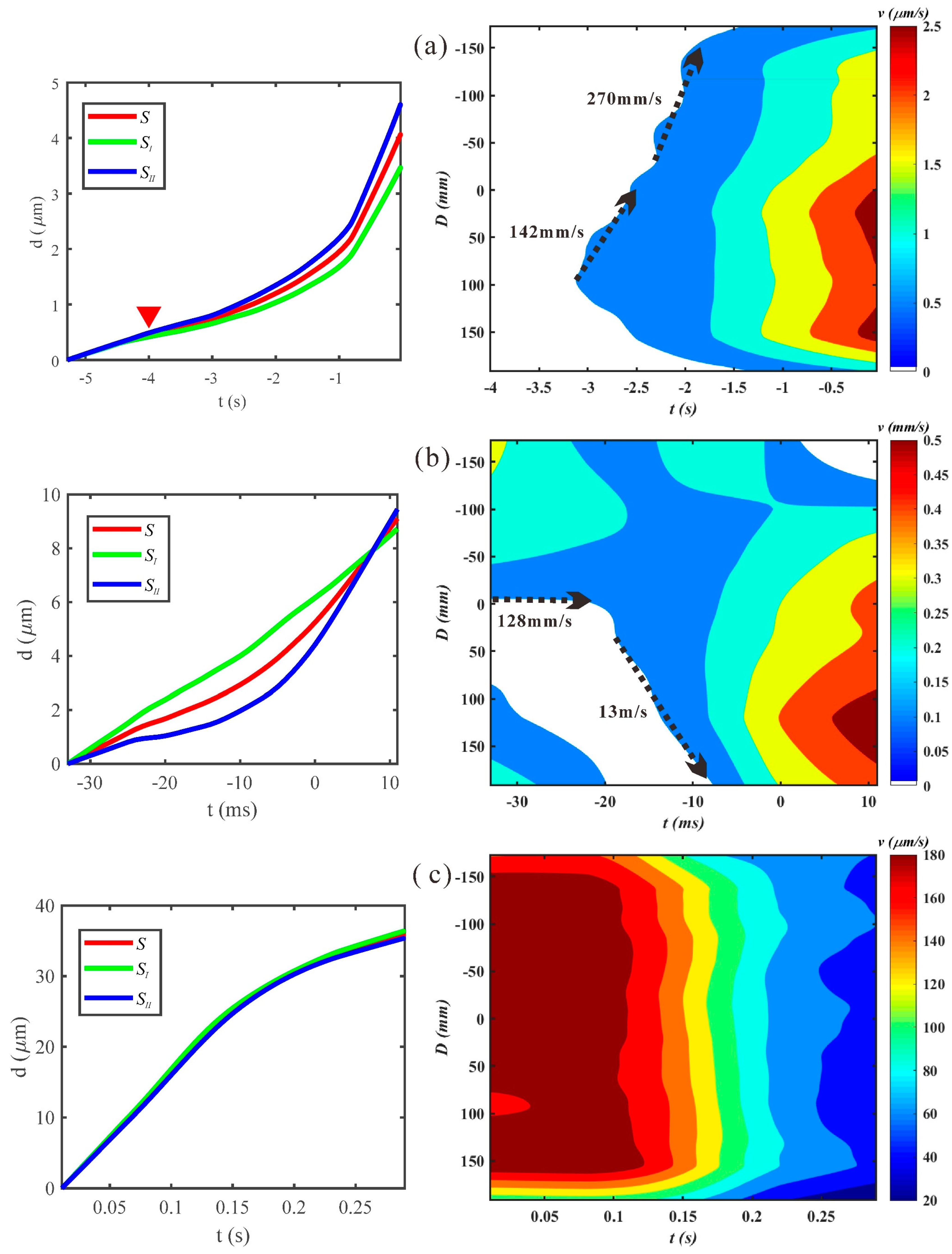
3.1. The Alternative Propagation Stage
3.2. The Overall Instability Stage
4. Discussion
4.1. Reliability Test of the DIC Method via Strain Gage Measurement
4.2. The Influences of the Fault Bend on the Rupture Propagation and Further Research
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sangha, S.; Peltzer, G.; Zhang, A.; Meng, L.; Liang, C.; Lundgren, P.; Fielding, E. Fault geometry of 2015, mw7.2 murghab, tajikistan earthquake controls rupture propagation: Insights from insar and seismological data. Earth Planet. Sci. Lett. 2017, 462, 132–141. [Google Scholar] [CrossRef]
- Elliott, A.J.; Oskin, M.E.; Liu-zeng, J.; Shao, Y.X. Persistent rupture terminations at a restraining bend from slip rates on the eastern altyn tagh fault. Tectonophysics 2018, 733, 57–72. [Google Scholar] [CrossRef]
- Acharya, H.K. Influence of fault bends on ruptures. Bull. Seismol. Soc. Am. 1997, 87, 1691–1696. [Google Scholar]
- Barka, A.A.; Kadinsky-Cade, K. Strike-slip fault geometry in turkey and its influence on earthquake activity. Tectonics 1988, 7, 663–684. [Google Scholar] [CrossRef]
- Ando, R.; Imanishi, K.; Panayotopoulos, Y.; Kobayashi, T. Dynamic rupture propagation on geometrically complex fault with along-strike variation of fault maturity: Insights from the 2014 northern nagano earthquake. Earth Planets Space 2017, 69, 130. [Google Scholar] [CrossRef]
- Wang, W.-M.; He, Y.-M.; Yao, Z.-X. Complexity of the coseismic rupture for 1999 chi-chi earthquake (Taiwan) from inversion of gps observations. Tectonophysics 2004, 382, 151–172. [Google Scholar] [CrossRef]
- King, G.; Nábělek, J. Role of fault bends in the initiation and termination of earthquake rupture. Science 1985, 228, 984–987. [Google Scholar] [CrossRef] [PubMed]
- King, G.C.P. Speculations on the geometry of the initiation and termination processes of earthquake rupture and its relation to morphology and geological structure. Pure Appl. Geophys. 1986, 124, 567–585. [Google Scholar] [CrossRef]
- Aochi, H.; Fukuyama, E.; Matsu’ura, M. Spontaneous rupture propagation on a non-planar fault in 3-d elastic medium. Pure Appl. Geophys. 2000, 157, 2003–2027. [Google Scholar] [CrossRef]
- Oglesby, D.D.; Day, S.M. The effect of fault geometry on the 1999 chi-chi (Taiwan) earthquake. Geophys. Res. Lett. 2001, 28, 1831–1834. [Google Scholar] [CrossRef]
- Duan, B.; Oglesby, D.D. Multicycle dynamics of nonplanar strike-slip faults. J. Geophys. Res. Solid Earth 2005, 110. [Google Scholar] [CrossRef]
- Kase, Y.; Day, S.M. Spontaneous rupture processes on a bending fault. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Fang, Z.; Xu, G.; Oglesby, D.D. Geometric effects on earthquake nucleation on bent dip-slip faults. Int. J. Appl. Mech. 2011, 3, 99–117. [Google Scholar] [CrossRef]
- Lozos, J.C.; Oglesby, D.D.; Duan, B.; Wesnousky, S.G. The effects of double fault bends on rupture propagation: A geometrical parameter study. Bull. Seismol. Soc. Am. 2011, 101, 385–398. [Google Scholar] [CrossRef]
- Zeng, Y.; Chen, C.-H. Fault rupture process of the 20 september 1999 chi-chi, Taiwan, earthquake. Bull. Seismol. Soc. Am. 2001, 91, 1088–1098. [Google Scholar] [CrossRef]
- Aochi, H.; Fukuyama, E. Three-dimensional nonplanar simulation of the 1992 landers earthquake. J. Geophys. Res. Solid Earth 2002, 107, ESE4-1–ESE4-12. [Google Scholar] [CrossRef]
- Aochi, H.; Madariaga, R.L. The 1999 Izmit, Turkey, earthquake: Nonplanar fault structure, dynamic rupture process, and strong ground motion. Bull. Seismol. Soc. Am. 2003, 93, 1249–1266. [Google Scholar] [CrossRef]
- Ma, J.; Ma, W.; Ma, S.; Deng, Z.; Liu, L.; Liu, T. Experimental study and numerical simulation on physical fields during the deformation of a 5° bend fault. Seismol. Geol. 1995, 17, 318–326. [Google Scholar]
- Kato, N.; Satoh, T.; Lei, X.; Yamamoto, K.; Hirasawa, T. Effect of fault bend on the rupture propagation process of stick-slip. Tectonophysics 1999, 310, 81–99. [Google Scholar] [CrossRef]
- Rousseau, C.-E.; Rosakis, A.J. On the influence of fault bends on the growth of sub-rayleigh and intersonic dynamic shear ruptures. J. Geophys. Res. Solid Earth 2003, 108. [Google Scholar] [CrossRef]
- Liu, L.; Ma, J.; Ma, S. Characteristics and evolution of background strain field on typical structure models. Seismol. Geol. 1995, 17, 349–356. [Google Scholar]
- Ma, J.; Liu, L.; Ma, S. Fault geometry and departure of precursors from the epicenter. Earthq. Res. China 1998, 12, 59–67. [Google Scholar]
- Guo, Y.-S.; Ma, J.; Yun, L. Experimental study on stick-slip process of bending faults. Seismol. Geol. 2011, 33, 26–35. [Google Scholar]
- Yun, L.; Guo, Y.-S.; Ma, J. An experimaental study of evolution of physical field and the alternative activities during stick-slip of 5° bend fault. Seismol. Geol. 2011, 33, 356–368. [Google Scholar]
- Zhuo, Y.-Q.; Liu, P.; Chen, S.; Guo, Y.; Ma, J. Laboratory observations of tremor-like events generated during preslip. Geophys. Res. Lett. 2018, 45, 6926–6934. [Google Scholar] [CrossRef]
- Zhuo, Y.-Q.; Guo, Y.; Chen, S.; Ji, Y.; Ma, J. Laboratory observations of linkage of preslip zones prior to stick-slip instability. Entropy 2018, 20, 629. [Google Scholar] [CrossRef]
- Zhuo, Y.-Q.; Bornyakov, S.A.; Guo, Y.-S.; Ma, J.; Sherman, S.I. Influences of obliquity angle difference on the evolution of fen-wei rift: A study from segemented transtension clay model. Seismol. Geol. 2016, 38, 259–277. [Google Scholar]
- Zhuo, Y.-Q.; Ma, J.; Guo, Y.-S.; Ji, Y.-T. Identification of the meta-instability stage via synergy of fault displacement: An experimental study based on the digital image correlation method. Phys. Chem. Earth Parts A/B/C 2015, 85–86, 216–224. [Google Scholar] [CrossRef]
- Ji, Y.; Hall, S.A.; Baud, P.; Wong, T.F. Characterization of pore structure and strain localization in majella limestone by x-ray computed tomography and digital image correlation. Geophys. J. Int. 2015, 200, 699–717. [Google Scholar] [CrossRef]
- Zhuo, Y.; Guo, Y.; Ji, Y.; Ma, J. Slip synergism of planar strike-slip fault during meta-instable state: Experimental research based on digital image correlation analysis. Sci. China Earth Sci. 2013, 56, 1881–1887. [Google Scholar] [CrossRef]
- Rudnick, R.L.; Gao, S. 3.01—Composition of the continental crust. In Treatise on Geochemistry; Holland, H.D., Turekian, K.K., Eds.; Pergamon: Oxford, UK, 2003; pp. 1–64. [Google Scholar]
- Sutton, M.A.; Wolters, W.J.; Peters, W.H.; Ranson, W.F.; McNeill, S.R. Determination of displacements using an improved digital correlation method. Image Vis. Comput. 1983, 1, 133–139. [Google Scholar] [CrossRef]
- Peters, W.H.; Ranson, W.F. Digital imaging techniques in experimental stress analysis. OPTICE 1982, 21, 213427. [Google Scholar] [CrossRef]
- Yamaguchi, I. A laser-speckle strain gauge. J. Phys. E Sci. Instrum. 1981, 14, 1270–1273. [Google Scholar] [CrossRef]
- McLaskey, G.C.; Kilgore, B.D. Foreshocks during the nucleation of stick-slip instability. J. Geophys. Res. Solid Earth 2013, 118, 2982–2997. [Google Scholar] [CrossRef]
- Dieterich, J.H. Preseismic fault slip and earthquake prediction. J. Geophys. Res. 1978, 83, 3940. [Google Scholar] [CrossRef]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuo, Y.-Q.; Guo, Y.; Bornyakov, S.A. Laboratory Observations of Repeated Interactions between Ruptures and the Fault Bend Prior to the Overall Stick-Slip Instability Based on a Digital Image Correlation Method. Appl. Sci. 2019, 9, 933. https://doi.org/10.3390/app9050933
Zhuo Y-Q, Guo Y, Bornyakov SA. Laboratory Observations of Repeated Interactions between Ruptures and the Fault Bend Prior to the Overall Stick-Slip Instability Based on a Digital Image Correlation Method. Applied Sciences. 2019; 9(5):933. https://doi.org/10.3390/app9050933
Chicago/Turabian StyleZhuo, Yan-Qun, Yanshuang Guo, and Sergei Alexandrovich Bornyakov. 2019. "Laboratory Observations of Repeated Interactions between Ruptures and the Fault Bend Prior to the Overall Stick-Slip Instability Based on a Digital Image Correlation Method" Applied Sciences 9, no. 5: 933. https://doi.org/10.3390/app9050933
APA StyleZhuo, Y.-Q., Guo, Y., & Bornyakov, S. A. (2019). Laboratory Observations of Repeated Interactions between Ruptures and the Fault Bend Prior to the Overall Stick-Slip Instability Based on a Digital Image Correlation Method. Applied Sciences, 9(5), 933. https://doi.org/10.3390/app9050933