Adaptive Threshold-Aided K-Best Sphere Decoding for Large MIMO Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
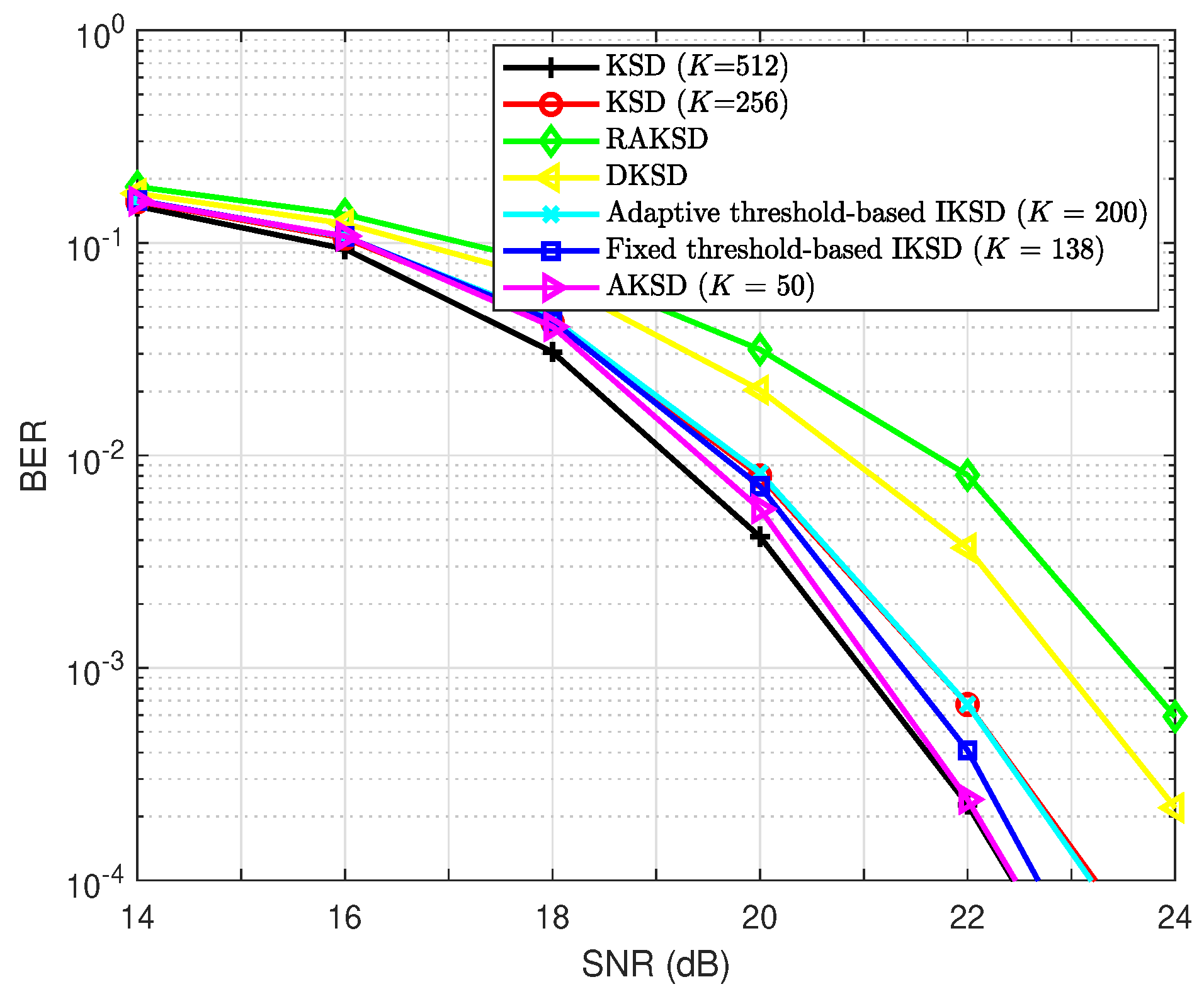
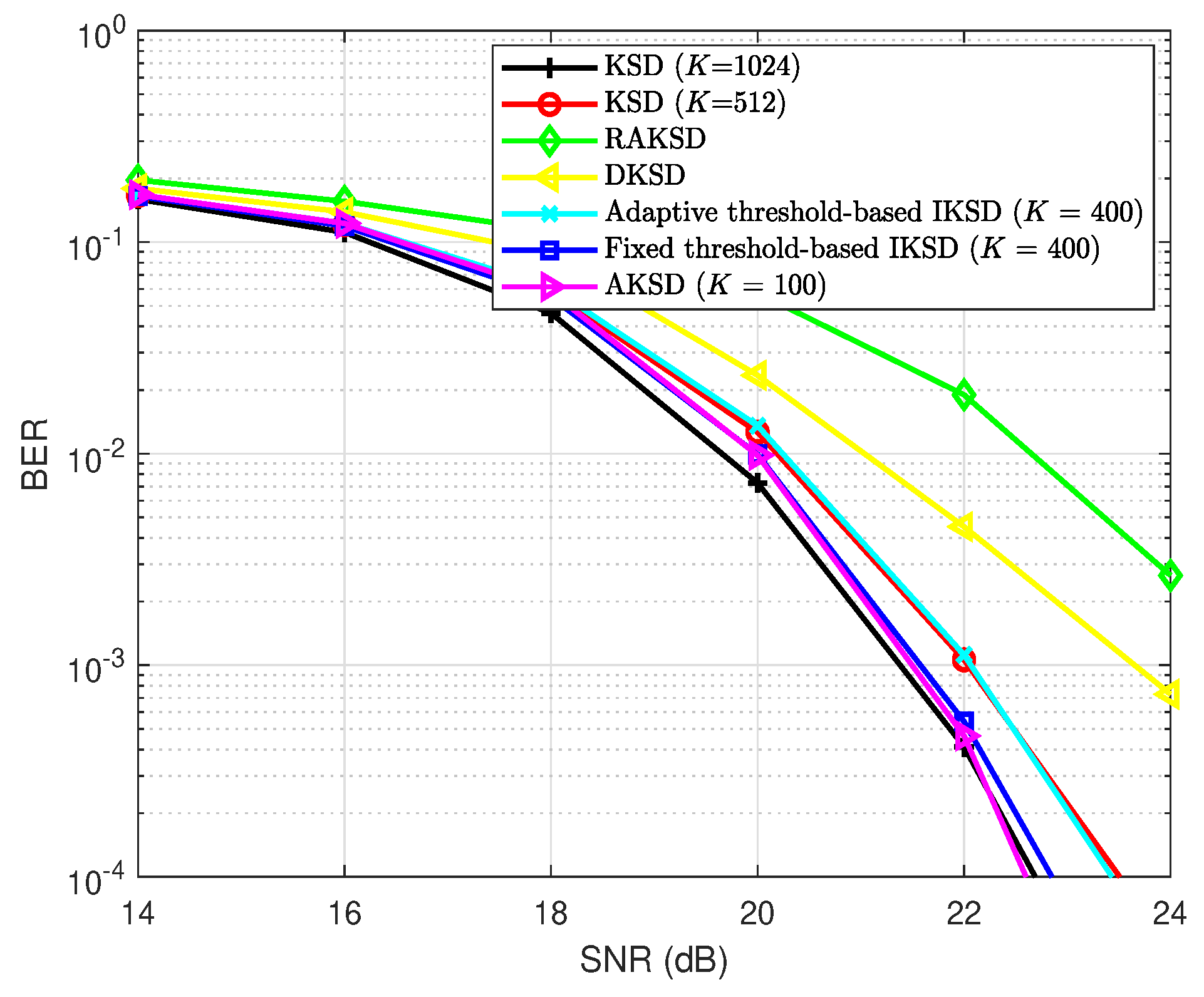
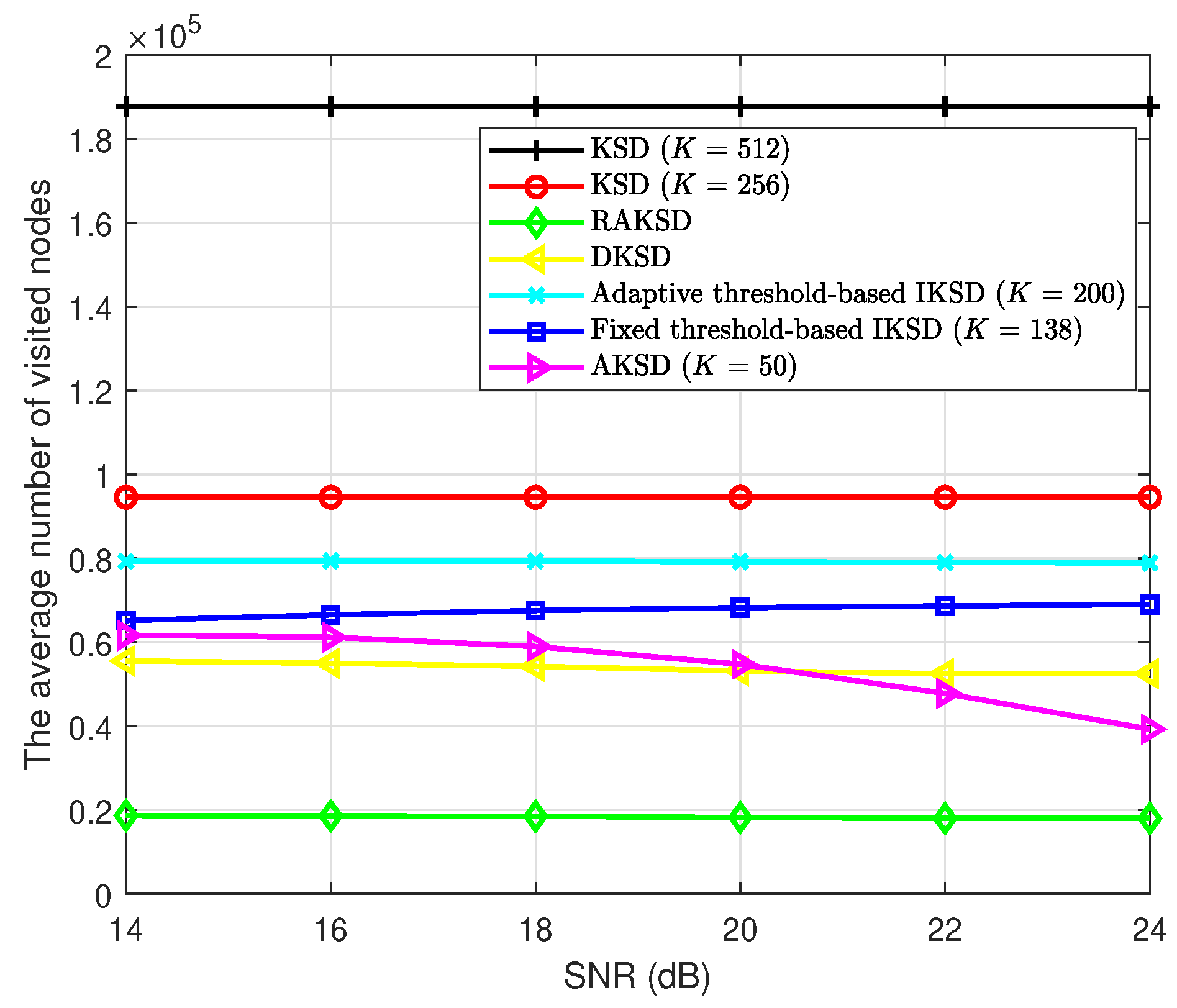
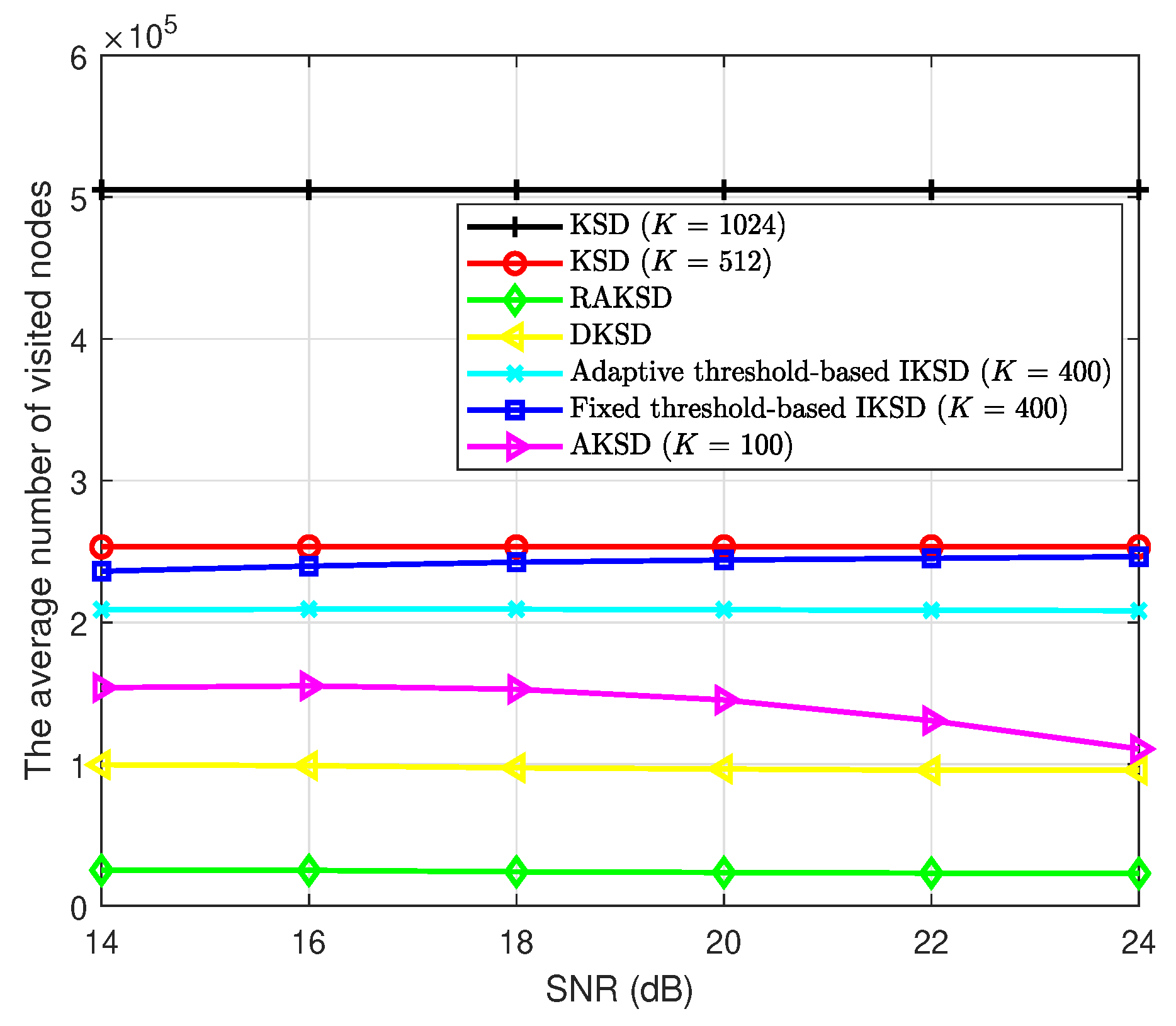
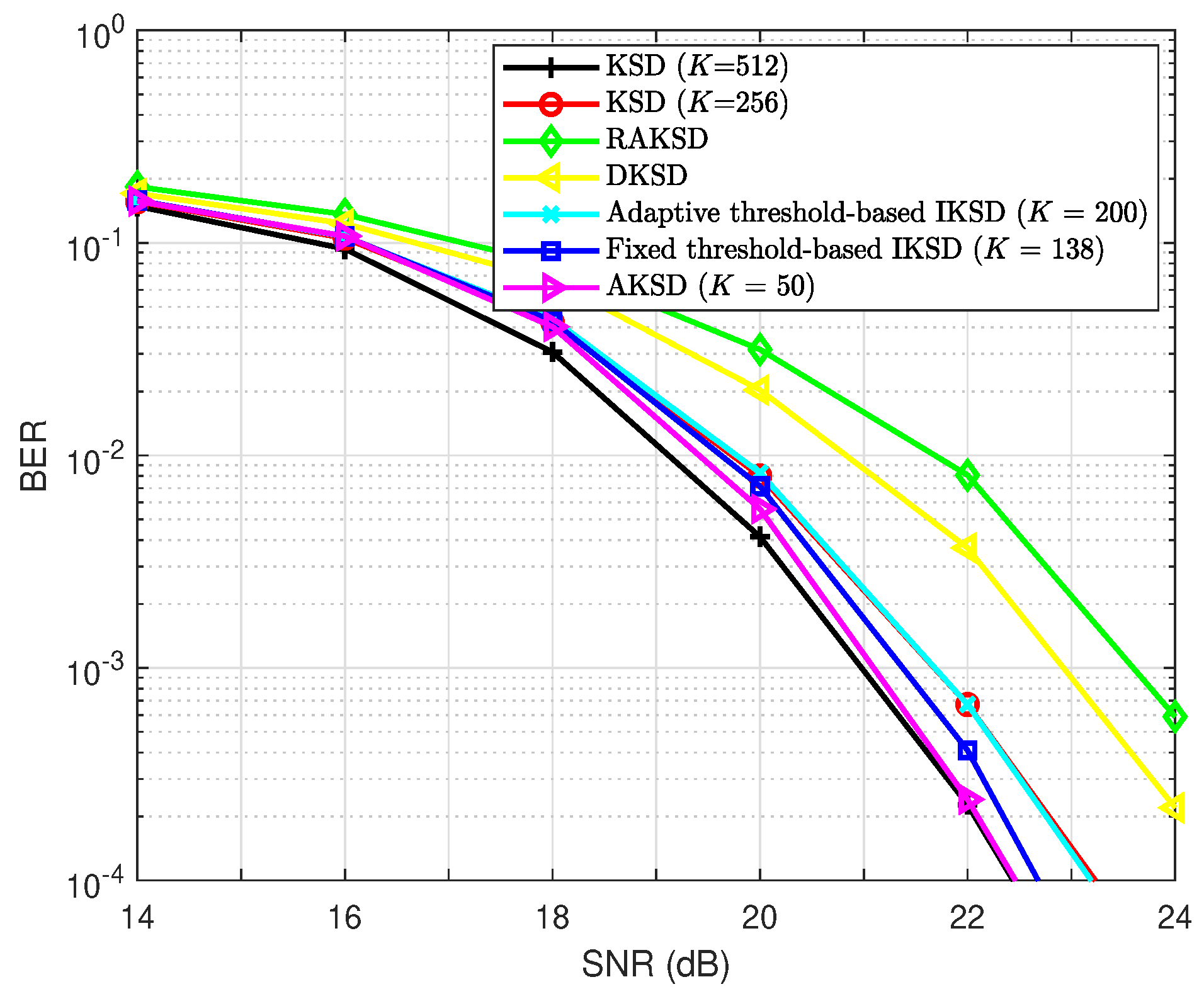
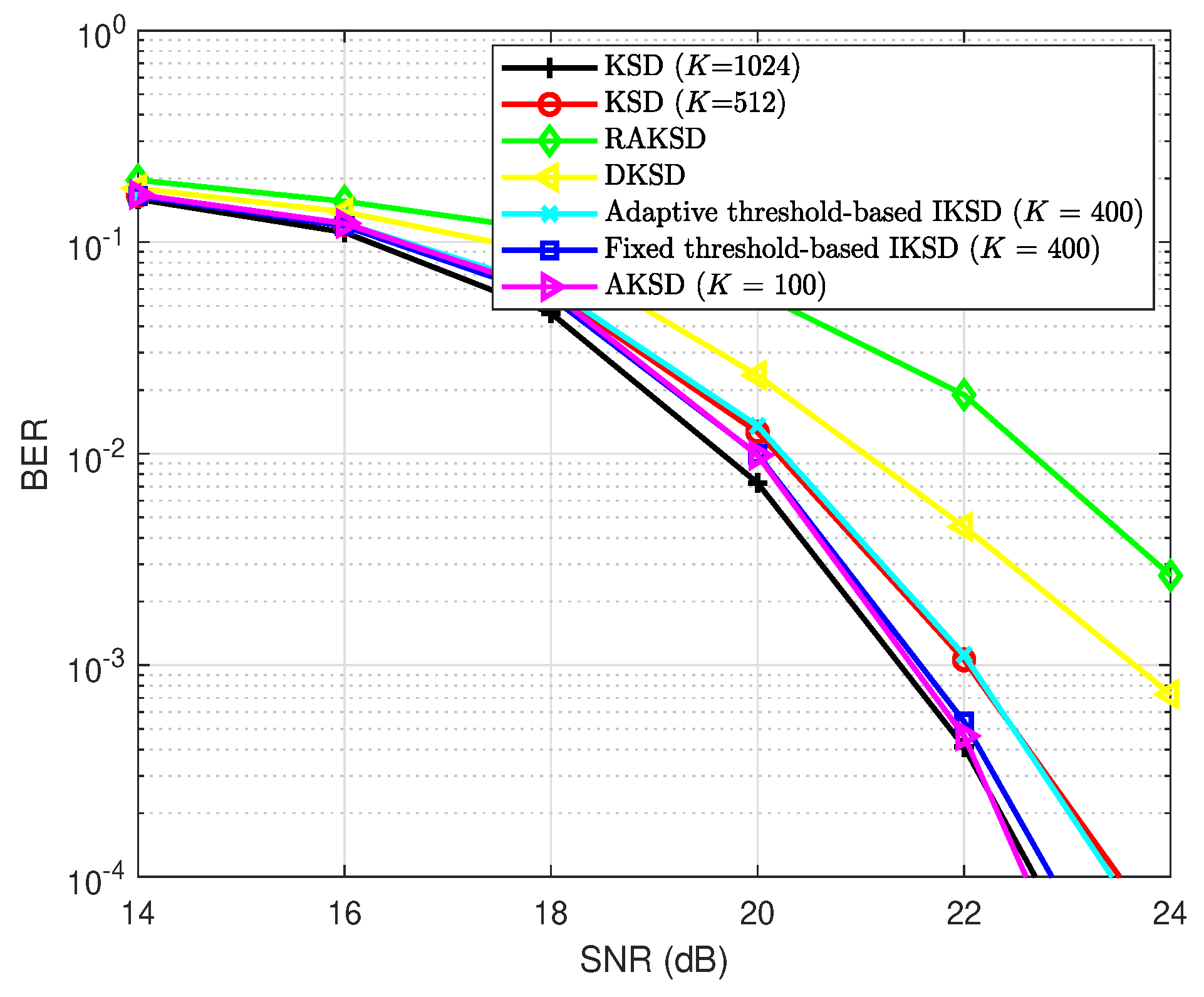
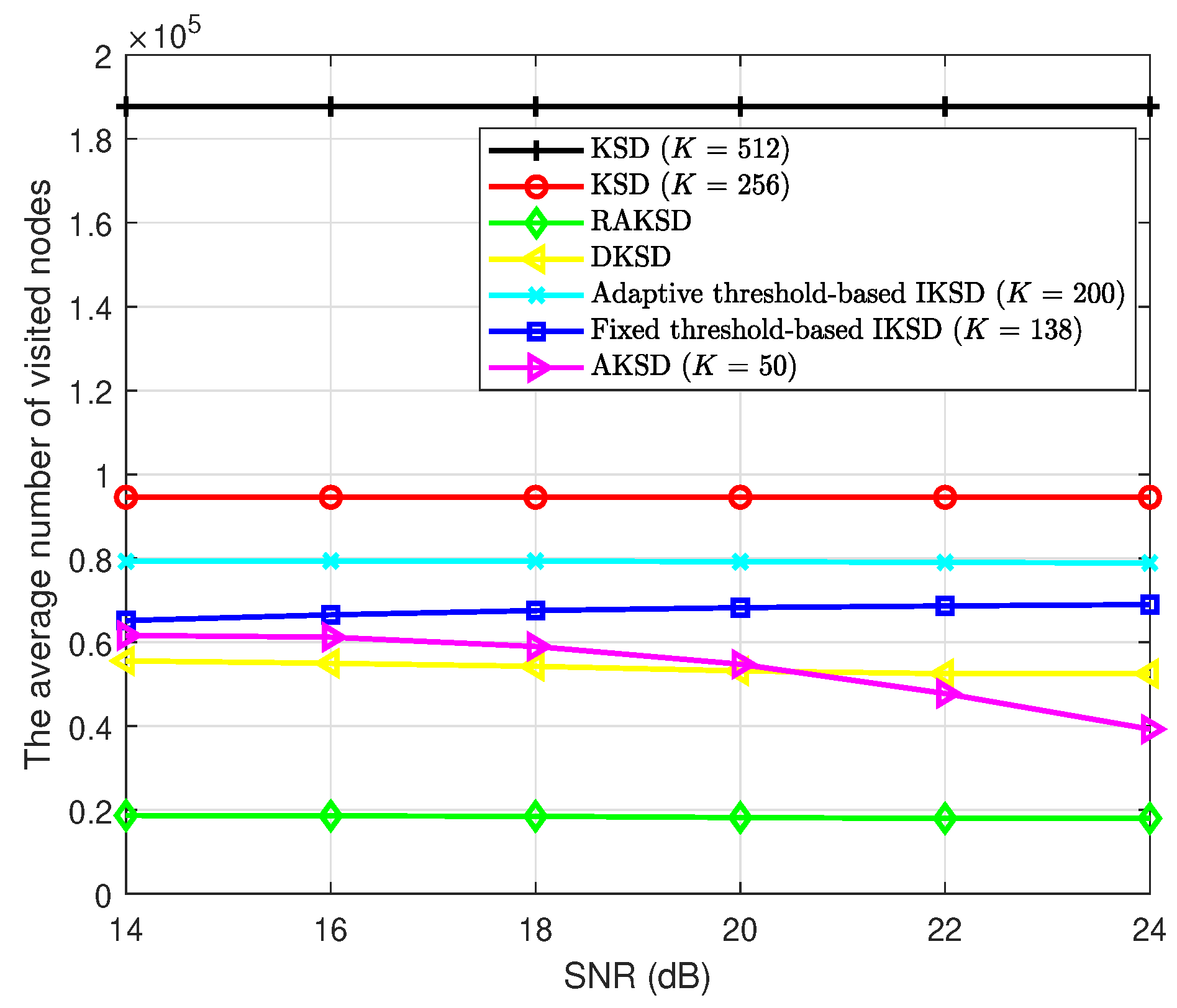
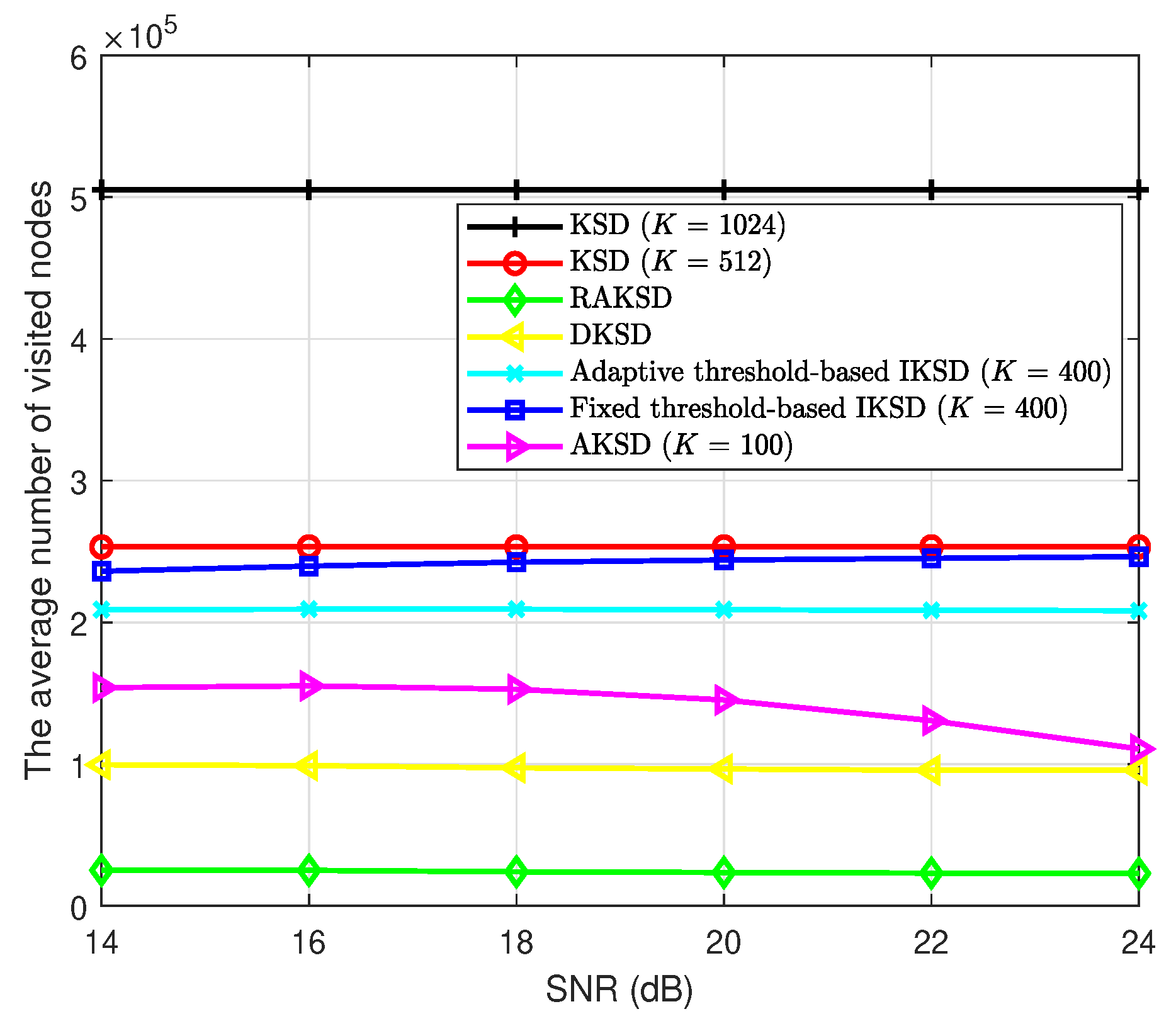
- We propose the AKSD algorithm, in which the adaptive threshold controls the number of visited nodes in each layer of the tree. In this algorithm, the threshold for retaining the most promising nodes at each layer is adaptively determined based on the ratio between the first and second minimum path metrics at each layer, the SNR, and the layer index.
- To evaluate the performance of the proposed AKSD algorithm, we have performed simulations for large MIMO systems. The simulation results show that, compared to the conventional KSD algorithm, the AKSD algorithm requires up to 71% less computational complexity.
2. Background
2.1. MIMO System Description
2.2. Sphere Decoder for MIMO
3. K-Best SD Algorithm
3.1. Conventional KSD Algorithm
3.2. Adaptive Threshold for KSD
| Algorithm 1: The AKSD Algorithm. |
|
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, M.; Yin, B.; Wang, G.; Dick, C.; Cavallaro, J.R.; Studer, C. Large-scale MIMO detection for 3GPP LTE: Algorithms and FPGA implementations. IEEE J. Sel. Top. Signal Process. 2014, 8, 916–929. [Google Scholar] [CrossRef]
- Rusek, F.; Persson, D.; Lau, B.K.; Larsson, E.G.; Marzetta, T.L.; Edfors, O.; Tufvesson, F. Scaling up MIMO: Opportunities and challenges with very large arrays. IEEE Signal Process. Mag. 2013, 30, 40–60. [Google Scholar] [CrossRef]
- Tseng, S.; Lee, H. An adaptive partial parallel multistage detection for MIMO systems. IEEE Trans. Commun. 2005, 53, 587–591. [Google Scholar] [CrossRef]
- Ting, S.H.; Sakaguchi, K.; Araki, K. On the practical performance of VBLAST. IEEE Commun. Lett. 2004, 8, 564–566. [Google Scholar] [CrossRef]
- Barbero, L.G.; Thompson, J.S. Fixing the complexity of the sphere decoder for MIMO detection. IEEE Trans. Wireless Commun. 2008, 7, 2131–2142. [Google Scholar] [CrossRef]
- Kong, B.Y.; Park, I. Improved Sorting Architecture for K-Best MIMO Detection. IEEE Trans. Circuits Syst. II Exp. Briefs 2017, 64, 1042–1046. [Google Scholar]
- Han, S.; Cui, T.; Tellambura, C. Improved K-best sphere detection for uncoded and coded MIMO systems. IEEE Wirel. Commun. Lett. 2012, 1, 472–475. [Google Scholar] [CrossRef]
- Guo, Z.; Nilsson, P. Algorithm and implementation of the K-best sphere decoding for MIMO detection. IEEE J. Sel. Areas Commun. 2006, 24, 491–503. [Google Scholar]
- Shen, C.; Eltawil, A.M. A radius adaptive K-best decoder with early termination: Algorithm and VLSI architecture. IEEE Trans. Circuits Syst. I Reg. Pap. 2010, 57, 2476–2486. [Google Scholar] [CrossRef]
- Castillo-Leon, J.F.; Cardenas-Juarez, M.; Pineda-Rico, U.; Stevens-Navarro, E. A Semifixed Complexity Sphere Decoder for Uncoded Symbols for Wireless Communications. IEICE Trans. Commun. 2014, 97, 2776–2783. [Google Scholar] [CrossRef]
- Georgis, G.; Nikitopoulos, K.; Jamieson, K. Geosphere: An Exact Depth-First, Sphere Decoder Architecture Scalable to Very Dense Constellations. IEEE Access. 2017, 5, 4233–4249. [Google Scholar] [CrossRef]
- Shim, B.; Kang, I. Sphere Decoding With a Probabilistic Tree Pruning. IEEE Trans. Signal Process. 2008, 56, 4867–4878. [Google Scholar] [CrossRef]
- Zhao, W.; Giannakis, G.B. Sphere decoding algorithms with improved radius search. IEEE Trans. Commun. 2005, 53, 1104–1109. [Google Scholar] [CrossRef]
- Weiliang, F.; Yang, L.; Zhijun, W.; Xinyu, M. A new dynamic K-best SD algorithm for MIMO detection. In Proceedings of the 2014 International Conference on Wireless Communications and Signal Processing (WCSP), Hefei, China, 23–25 October 2014; pp. 1–5. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ummatov, U.; Lee, K. Adaptive Threshold-Aided K-Best Sphere Decoding for Large MIMO Systems. Appl. Sci. 2019, 9, 4624. https://doi.org/10.3390/app9214624
Ummatov U, Lee K. Adaptive Threshold-Aided K-Best Sphere Decoding for Large MIMO Systems. Applied Sciences. 2019; 9(21):4624. https://doi.org/10.3390/app9214624
Chicago/Turabian StyleUmmatov, Uzokboy, and Kyungchun Lee. 2019. "Adaptive Threshold-Aided K-Best Sphere Decoding for Large MIMO Systems" Applied Sciences 9, no. 21: 4624. https://doi.org/10.3390/app9214624
APA StyleUmmatov, U., & Lee, K. (2019). Adaptive Threshold-Aided K-Best Sphere Decoding for Large MIMO Systems. Applied Sciences, 9(21), 4624. https://doi.org/10.3390/app9214624