Decision Support Models for Operations and Maintenance for Offshore Wind Farms: A Review


Abstract
1. Introduction
2. Operation and Maintenance: Influential Factors
2.1. Degradation and Failure Modeling
2.2. Vessel, Personnel and Spare Part Logistics
2.3. Transportation and Vessel Routing
2.4. Weather and External Factors
2.5. Economic Parameters and Cost Estimation
3. Maintenance Strategy
3.1. Preventive Maintenance
3.2. Condition Monitoring
3.3. Condition-Based Maintenance
3.4. Corrective Maintenance
4. Modeling Techniques
4.1. Properties of O&M Models
4.2. Types of Models
4.2.1. Discrete Event Simulation
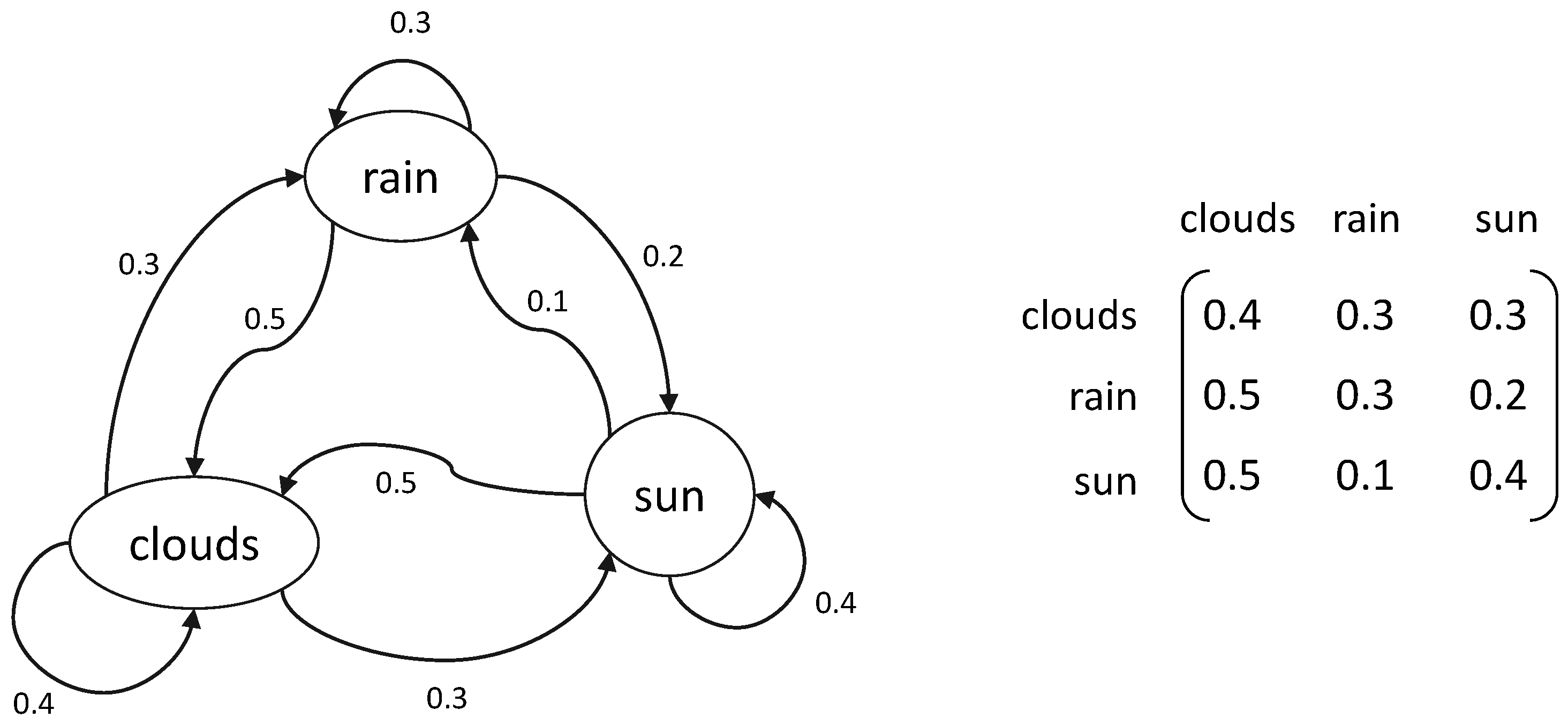
4.2.2. Markov Models
4.2.3. Differential Equations
4.3. Conclusions about Modeling
4.4. Modeling in the Literature
5. Optimization
5.1. Methods for Optimization
5.1.1. Algorithms
5.1.2. Heuristics
5.1.3. Stochastic Programming
5.1.4. Dynamic Programming
5.2. Conclusions about Optimization Methods
5.3. Optimization in the Literature
6. Data Sources and Availability of Data
6.1. Data in the Literature
6.1.1. Weather
6.1.2. Failures
6.1.3. Costs
6.1.4. Vessel Information
7. Discussion
7.1. Factors to Consider
7.2. Types of Maintenance
- (a)
- (b)
- (c)
- (d)
7.3. Modeling
7.4. Optimization
7.5. Data
- (a)
- (b)
- (c)
- (d)
- (e)
7.6. Usefulness of Models
7.7. Trends and Future Work
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Wind Energy Association (WWEA). Half-Year Report 2014; World Wind Energy Association: Bonn, Germany, 2014. [Google Scholar]
- European Wind Energy Association (EWEA). Wind in Power 2015 European Statistics; Technical Report; World Wind Energy Association: Bonn, Germany, 2016. [Google Scholar]
- Wind Europe. The European Offshore Wind Industry—Key Trends and Statistics 2016; Technical Report; Wind Europe: Brussels, Belgium, 2017. [Google Scholar]
- Feng, Y.; Tavner, P.; Long, H. Early experiences with UK round 1 offshore wind farms. Proc. Inst. Civ. Eng. 2010, 163, 167–181. [Google Scholar] [CrossRef]
- Power, D.J. Decision Support Systems; Concepts and Resources for Managers; Reference and Research Book News; Book News, Inc.: Portland, OR, USA, 2002; Volume 17. [Google Scholar]
- Kessler, E.H. Encyclopedia of Management Theory; Sage Publications: Thousand Oaks, CA, USA, 2013. [Google Scholar]
- El-Thalji, I.; Liyanage, J.P. On the operation and maintenance practices of wind power asset: A status review and observations. J. Qual. Maint. Eng. 2012, 18, 232–266. [Google Scholar] [CrossRef]
- Hofmann, M. A review of decision support models for offshore wind farms with an emphasis on operation and maintenance strategies. Wind Eng. 2011, 35, 1–15. [Google Scholar] [CrossRef]
- Henderson, A.R.; Morgan, C.; Smith, B.; Sørensen, H.C.; Barthelmie, R.J.; Boesmans, B. Offshore wind energy in europe—A review of the state-of-the-art. Wind Energy 2003, 6, 35–52. [Google Scholar] [CrossRef]
- Nielsen, J.J.; Sørensen, J.D. On risk-based operation and maintenance of offshore wind turbine components. Reliab. Eng. Syst. Saf. 2011, 96, 218–229. [Google Scholar] [CrossRef]
- Dinwoodie, I.A.; McMillan, D.; Quail, F. Analysis of Offshore Wind Turbine Operation & Maintenance Using a Novel Time Domain Meteo-Ocean Modeling Approach; ASME Turbo Expo 2012; ASME: New York, NY, USA, 2012. [Google Scholar]
- Scheu, M.; Matha, D.; Hofmann, M.; Muskulus, M. Maintenance strategies for large offshore wind farms. Energy Procedia 2012, 24, 281–288. [Google Scholar] [CrossRef]
- Besnard, F.; Fischer, K.; Tjernberg, L.B. A model for the optimization of the maintenance support organization for offshore wind farms. IEEE Trans. Sustain. Energy 2013, 4, 443–450. [Google Scholar] [CrossRef]
- Dinwoodie, I.; McMillan, D.; Revie, M.; Lazakis, I.; Dalgic, Y. Development of a Combined Operational and Strategic Decision Support Model for Offshore Wind. Energy Procedia 2013, 35, 157–166. [Google Scholar] [CrossRef]
- Halvorsen-Weare, E.E.; Gundegjerde, C.; Halvorsen, I.B.; Hvattum, L.M.; Nonås, L.M. Vessel fleet analysis for maintenance operations at offshore wind farms. Energy Procedia 2013, 35, 167–176. [Google Scholar] [CrossRef]
- Hofmann, M.; Sperstad, I.B. NOWIcob—A tool for reducing the maintenance costs of offshore wind farms. Energy Procedia 2013, 35, 177–186. [Google Scholar] [CrossRef]
- Endrerud, O.E.V.; Liyanage, J.P.; Keseric, N. Marine logistics decision support for operation and maintenance of offshore wind parks with a multi method simulation model. In Proceedings of the 2014 Winter Simulation Conference, Savanah, GA, USA, 7–10 December 2014. [Google Scholar]
- Perveen, R.; Kishor, N.; Mohanty, S.R. Off-shore wind farm development: Present status and challenges. Renew. Sustain. Energy Rev. 2014, 29, 780–792. [Google Scholar] [CrossRef]
- Sperstad, I.B.; Halvorsen-Weare, E.E.; Hofmann, M.; Nonås, L.M.; Stålhane, M.; Wu, M. A Comparison of Single-and Multi-parameter Wave Criteria for Accessing Wind Turbines in Strategic Maintenance and Logistics Models for Offshore Wind Farms. Energy Procedia 2014, 53, 221–230. [Google Scholar] [CrossRef]
- Dalgic, Y.; Lazakis, I.; Dinwoodie, I.; McMillan, D.; Revie, M. Advanced logistics planning for offshore wind farm operation and maintenance activities. Ocean Eng. 2015, 101, 211–226. [Google Scholar] [CrossRef]
- Endrerud, O.E.V.; Liyanage, J.P. Decision Support for Operations and Maintenance of Offshore Wind Parks; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Sahnoun, M.; Baudry, D.; Mustafee, N.; Louis, A.; Smart, P.A.; Godsiff, P.; Mazari, B. Modelling and simulation of operation and maintenance strategy for offshore wind farms based on multi-agent system. J. Intell. Manuf. 2015, 1–17. [Google Scholar] [CrossRef]
- Shafiee, M.; Brennan, F.; Espinosa, I.A. A parametric whole life cost model for offshore wind farms. Int. J. Life Cycle Assess. 2016, 21, 961–975. [Google Scholar] [CrossRef]
- Gintautas, T.; Sørensen, J.D. Improved Methodology of Weather Window Prediction for Offshore Operations Based on Probabilities of Operation Failure. J. Mar. Sci. Eng. 2017, 5, 20. [Google Scholar] [CrossRef]
- Raknes, N.T.; deskaug, K.; Stålhane, M.; Hvattum, L.M. Scheduling of maintenance tasks and routing of a joint vessel fleet for multiple offshore wind farms. J. Mar. Sci. Eng. 2017, 5, 11. [Google Scholar] [CrossRef]
- Rinaldi, G.; Thies, P.; Walker, R.; Johanning, L. A decision support model to optimise the operation and maintenance strategies of an offshore renewable energy farm. Ocean Eng. 2017, 145, 250–262. [Google Scholar] [CrossRef]
- Nguyen, T.A.T.; Chou, S.Y. Maintenance strategy selection for improving cost-effectiveness of offshore wind systems. Energy Convers. Manag. 2018, 157, 86–95. [Google Scholar] [CrossRef]
- Eecen, P.; Braam, H.; Rademakers, L.; Obdam, T. Estimating costs of operations and maintenance of offshore wind farms. In Proceedings of the European Wind Energy Conference and Exhibition, Milan, Italy, 7–10 May 2007. [Google Scholar]
- Obdam, T.; Rademakers, L.; Braam, H.; Eecen, P. Estimating costs of operation & maintenance for offshore wind farms. In Proceedings of the European Offshore Wind Energy Conference, Berlin, Germany, 4–6 December 2007. [Google Scholar]
- Douard, F.; Domecq, C.; Lair, W. A probabilistic approach to introduce risk measurement indicators to an offshore wind project evaluation—Improvement to an existing tool ECUME. Energy Procedia 2012, 24, 255–262. [Google Scholar] [CrossRef]
- Asgarpour, M.; van de Pieterman, R. O&M Cost Reduction of Offshore Wind Farms: A Novel Case Study; ECN: Petten, The Netherlands, 2014. [Google Scholar]
- Shafiee, M.; Finkelstein, M. An optimal age-based group maintenance policy for multi-unit degrading systems. Reliab. Eng. Syst. Saf. 2015, 134, 230–238. [Google Scholar] [CrossRef]
- Joschko, P.; Widok, A.H.; Appel, S.; Greiner, S.; Albers, H.; Page, B. Modeling and simulation of offshore wind farm O&M processes. Environ. Impact Assess. Rev. 2015, 52, 31–39. [Google Scholar]
- Abdollahzadeh, H.; Atashgar, K.; Abbasi, M. Multi-objective opportunistic maintenance optimization of a wind farm considering limited number of maintenance groups. Renew. Energy 2016, 88, 247–261. [Google Scholar] [CrossRef]
- Alaswad, S.; Xiang, Y. A review on condition-based maintenance optimization models for stochastically deteriorating system. Reliab. Eng. Syst. Saf. 2017, 157, 54–63. [Google Scholar] [CrossRef]
- Asgarpour, M.; Sørensen, J.D. O&M modeling of offshore wind farms—State of the art and future developments. In Proceedings of the 2016 Annual Reliability and Maintainability Symposium (RAMS), Tucson, AZ, USA, 25–28 January 2016; pp. 1–6. [Google Scholar]
- Pliego Marugán, A.; García Márquez, F.P.; Pinar Pérez, J.M. Optimal maintenance management of offshore wind farms. Energies 2016, 9, 46. [Google Scholar] [CrossRef]
- Tibaldi, C.; Henriksen, L.C.; Hansen, M.H.; Bak, C. Wind turbine fatigue damage evaluation based on a linear model and a spectral method. Wind Energy 2016, 19, 1289–1306. [Google Scholar] [CrossRef]
- Scheu, M.N.; Kolios, A.; Fischer, T.; Brennan, F. Influence of statistical uncertainty of component reliability estimations on offshore wind farm availability. Reliab. Eng. Syst. Saf. 2017, 168, 28–39. [Google Scholar] [CrossRef]
- Welte, T.M.; Sperstad, I.B.; Sørum, E.H.; Kolstad, M.L. Integration of Degradation Processes in a Strategic Offshore Wind Farm O&M Simulation Model. Energies 2017, 10, 925. [Google Scholar]
- Stock-Williams, C.; Swamy, S.K. Automated daily maintenance planning for offshore wind farms. Renew. Energy 2018. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, X.; Guo, X. Optimizing wind turbine’s maintenance policies under performance-based contract. Renew. Energy 2019, 135, 626–634. [Google Scholar] [CrossRef]
- Shafiee, M. Maintenance logistics organization for offshore wind energy: Current progress and future perspectives. Renew. Energy 2015, 77, 182–193. [Google Scholar] [CrossRef]
- Dinwoodie, I.; Endrerud, O.E.V.; Hofmann, M.; Martin, R.; Sperstad, I.B. Reference Cases for Verification of Operation and Maintenance Simulation Models for Offshore Wind Farms. Wind Eng. 2015, 39, 1–14. [Google Scholar] [CrossRef]
- O’Connor, M.; Lewis, T.; Dalton, G. Weather window analysis of Irish west coast wave data with relevance to operations & maintenance of marine renewables. Renew. Energy 2013, 52, 57–66. [Google Scholar]
- Van Bussel, G.; Bierbooms, W. The DOWEC Offshore Reference Windfarm: Analysis of Transportation for Operation and Maintenance. Wind Eng. 2003, 27, 381–391. [Google Scholar] [CrossRef]
- O’Connor, M.; Burke, D.; Curtin, T.; Lewis, T.; Dalton, G. Weather windows analysis incorporating wave height, wave period, wind speed and tidal current with relevance to deployment and maintenance of marine renewables. In Proceedings of the 4th International Congress on Ocean Energy, Dublin, Ireland, 17–19 October 2012. [Google Scholar]
- McMillan, D.; Ault, G.W. Quantification of condition monitoring benefit for offshore wind turbines. Wind Eng. 2007, 31, 267–285. [Google Scholar] [CrossRef]
- Wu, M. Numerical analysis of docking operation between service vessels and offshore wind turbines. Ocean Eng. 2014, 91, 379–388. [Google Scholar] [CrossRef]
- Ahn, D.; Shin, S.C.; Kim, S.Y.; Kharoufi, H.; Kim, H.C. Comparative evaluation of different offshore wind turbine installation vessels for Korean west–south wind farm. Int. J. Naval Archit. Ocean Eng. 2017, 9, 45–54. [Google Scholar] [CrossRef]
- Kooijman, H.; Lindenburg, C.; Winkelaar, D.; Van der Hooft, E. DOWEC 6 MW Pre-Design; Energy Research Center of the Netherlands (ECN): Petten, The Netherlands, 2003. [Google Scholar]
- Halvorsen-Weare, E.E.; Fagerholt, K.; Nonås, L.M.; Asbjørnslett, B.E. Optimal fleet composition and periodic routing of offshore supply vessels. Eur. J. Oper. Res. 2012, 223, 508–517. [Google Scholar] [CrossRef]
- Halvorsen-Weare, E.E.; Fagerholt, K. Optimization in offshore supply vessel planning. Optim. Eng. 2017, 18, 317–341. [Google Scholar] [CrossRef]
- Martini, M.; Guanche, R.; Losada, I.J.; Vidal, C. Accessibility assessment for operation and maintenance of offshore wind farms in the North Sea. Wind Energy 2017, 20, 637–656. [Google Scholar] [CrossRef]
- Schrotenboer, A.H.; uit het Broek, M.A.; Jargalsaikhan, B.; Roodbergen, K.J. Coordinating technician allocation and maintenance routing for offshore wind farms. Comput. Oper. Res. 2018, 98, 185–197. [Google Scholar] [CrossRef]
- Rothkopf, M.H.; McCarron, J.K.; Fromovitz, S. A weather model for simulating offshore construction alternatives. Manag. Sci. 1974, 20, 1345–1349. [Google Scholar] [CrossRef]
- Anastasiou, K.; Tsekos, C. Persistence statistics of marine environmental parameters from Markov theory, Part 1: Analysis in discrete time. Appl. Ocean Res. 1996, 18, 187–199. [Google Scholar] [CrossRef]
- Kuwashima, S.; Hogben, N. The estimation of wave height and wind speed persistence statistics from cumulative probability distributions. Coast. Eng. 1986, 9, 563–590. [Google Scholar] [CrossRef]
- Monbet, V.; Marteau, P.F. Continuous space discrete time Markov models for multivariate sea state parameter processes. In Proceedings of the Eleventh (2001) International Offshore and Polar Engineering Conference, Stavanger, Norway, 17–22 June 2001; International Society of Offshore and Polar Engineers: Mountain View, CA, USA, 2001. [Google Scholar]
- Lange, M. On the uncertainty of wind power predictions—Analysis of the forecast accuracy and statistical distribution of errors. J. Sol. Energy Eng. 2005, 127, 177–184. [Google Scholar] [CrossRef]
- Feuchtwang, J.; Infield, D. Offshore wind turbine maintenance access: A closed-form probabilistic method for calculating delays caused by sea-state. Wind Energy 2013, 16, 1049–1066. [Google Scholar] [CrossRef]
- Hagen, B.; Simonsen, I.; Hofmann, M.; Muskulus, M. A multivariate Markov weather model for O&M simulation of offshore wind parks. Energy Procedia 2013, 35, 137–147. [Google Scholar]
- Ambühl, S.; Kramer, M.; Sørensen, J.D. Risk-based Operation and Maintenance Approach for Wave Energy Converters Taking Weather Forecast Uncertainties into Account. In Proceedings of the Twenty-sixth (2016) International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016; International Society of Offshore and Polar Engineers (ISOPE): Mountain View, CA, USA, 2016. [Google Scholar]
- Hersvik, K.; Endrerud, O.E.V. A high-fidelity weather time series generator using the Markov Chain process on a piecewise level. IOP Conf. Ser. 2017, 276, 012003. [Google Scholar] [CrossRef]
- Seyr, H.; Muskulus, M. Using a Langevin model for the simulation of environmental conditions in an offshore wind farm. J. Phys. Conf. Ser. 2018, 1104, 012023. [Google Scholar] [CrossRef]
- Taylor, J.W.; Jeon, J. Probabilistic forecasting of wave height for offshore wind turbine maintenance. Eur. J. Oper. Res. 2018, 267, 877–890. [Google Scholar] [CrossRef]
- Nilsson, J.; Bertling, L. Maintenance Management of Wind Power Systems Using Condition Monitoring Systems—Life Cycle Cost Analysis for Two Case Studies. IEEE Trans. Energy Convers. 2007, 22, 223–229. [Google Scholar] [CrossRef]
- Rademakers, L.; Braam, H.; Verbruggen, T. R&D needs for O&M of wind turbines. In Proceedings of the European Wind Energy Conference 2003, Madrid, Spain, 16–19 June 2003. [Google Scholar]
- Krokoszinski, H.J. Efficiency and effectiveness of wind farms—Keys to cost optimized operation and maintenance. Renew. Energy 2003, 28, 2165–2178. [Google Scholar] [CrossRef]
- Fu, Z.; Yuan, Y. Condition Health Monitoring of Offshore Wind Turbine based on Wireless Sensor Network. In Proceedings of the 2012 10th International Power & Energy Conference (IPEC), Ho Chi Minh City, Vietnam, 12–14 December 2012; pp. 649–654. [Google Scholar]
- Yang, W.; Tavner, P.J.; Crabtree, C.J.; Feng, Y.; Qiu, Y. Wind turbine condition monitoring: Technical and commercial challenges. Wind Energy 2014, 17, 673–693. [Google Scholar] [CrossRef]
- Bach-Andersen, M.; Rømer-Odgaard, B.; Winther, O. Flexible non-linear predictive models for large-scale wind turbine diagnostics. Wind Energy 2017, 20, 753–764. [Google Scholar] [CrossRef]
- Helsen, J.; Sitter, G.D.; Jordaens, P.J. Long-Term Monitoring of Wind Farms Using Big Data Approach. In Proceedings of the 2016 IEEE Second International Conference on Big Data Computing Service and Applications (BigDataService), Oxford, UK, 29 March–1 April 2016; pp. 265–268. [Google Scholar]
- Pattison, D.; Segovia Garcia, M.; Xie, W.; Quail, F.; Revie, M.; Whitfield, R.; Irvine, I. Intelligent integrated maintenance for wind power generation. Wind Energy 2016, 19, 547–562. [Google Scholar] [CrossRef]
- Leite, G.d.N.P.; Araújo, A.M.; Rosas, P.A.C. Prognostic techniques applied to maintenance of wind turbines: A concise and specific review. Renew. Sustain. Energy Rev. 2018, 81, 1917–1925. [Google Scholar] [CrossRef]
- Artigao, E.; Martín-Martínez, S.; Honrubia-Escribano, A.; Gómez-Lázaro, E. Wind turbine reliability: A comprehensive review towards effective condition monitoring development. Appl. Energy 2018, 228, 1569–1583. [Google Scholar] [CrossRef]
- European Committee for Standardization. CSN EN 13306:2010 Maintenance—Maintenance Terminology; European Committee for Standardization: Brussels, Belgium, 2010. [Google Scholar]
- Nance, R.E. A History of Discrete Event Simulation Programming Languages; ACM: New York, NY, USA, 1996. [Google Scholar]
- Kulkarni, V. Introduction to Modeling and Analysis of Stochastic Systems; Springer Texts in Statistics; Springer: New York, NY, USA, 2010. [Google Scholar]
- Pérez, E.; Ntaimo, L.; Byon, E.; Ding, Y. A stochastic DEVS wind turbine component model for wind farm simulation. In Proceedings of the 2010 Spring Simulation Multiconference, Orlando, FL, USA, 11–15 April 2010; p. 138. [Google Scholar]
- Byon, E.; Pérez, E.; Ding, Y.; Ntaimo, L. Simulation of wind farm operations and maintenance using discrete event system specification. SIMULATION 2011, 87, 1093–1117. [Google Scholar] [CrossRef]
- Pérez, E.; Ntaimo, L.; Ding, Y. Simulation of wind farm operations and maintenance. In Proceedings of the ASME Turbo Expo 2013: Turbine Technical Conference and Exposition, San Antonio, TX, USA, 3–7 June 2013. [Google Scholar]
- Leigh, J.M.; Dunnett, S.J. Use of Petri nets to model the maintenance of wind turbines. Qual. Reliab. Eng. Int. 2016, 32, 167–180. [Google Scholar] [CrossRef]
- Charniak, E. Bayesian networks without tears. AI Mag. 1991, 12, 50. [Google Scholar]
- Cryer, J.D.; Chan, K.S. Time Series Regression Models; Springer: Berlin, Germany, 2008; pp. 249–276. [Google Scholar]
- Murata, T. Petri nets: Properties, analysis and applications. Proc. IEEE 1989, 77, 541–580. [Google Scholar] [CrossRef]
- Staines, A.S. Rewriting Petri Nets as Directed Graphs. Int. J. Comput. 2011, 5, 289–297. [Google Scholar]
- Ko, R.K.; Lee, S.S.; Wah Lee, E. Business process management (BPM) standards: A survey. Bus. Process Manag. J. 2009, 15, 744–791. [Google Scholar] [CrossRef]
- Muehlen, M.z.; Recker, J. How Much Language Is Enough? Theoretical and Practical Use of the Business Process Modeling Notation. In Seminal Contributions to Information Systems Engineering: 25 Years of CAiSE; Bubenko, J., Krogstie, J., Pastor, O., Pernici, B., Rolland, C., Sølvberg, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 429–443. [Google Scholar]
- Lee, J.H.; Kim, C.O. Multi-agent systems applications in manufacturing systems and supply chain management: A review paper. Int. J. Prod. Res. 2008, 46, 233–265. [Google Scholar] [CrossRef]
- Diwekar, U. Introduction to Applied Optimization; Springer Science & Business Media: Berlin, Germany, 2008; Volume 22. [Google Scholar]
- Land, A.H.; Doig, A.G. An Automatic Method of Solving Discrete Programming Problems. Econometrica 1960, 28, 497–520. [Google Scholar] [CrossRef]
- Clarke, G.; Wright, J.W. Scheduling of vehicles from a central depot to a number of delivery points. Oper. Res. 1964, 12, 568–581. [Google Scholar] [CrossRef]
- Glover, F. Future paths for integer programming and links to artificial intelligence. Comput. Oper. Res. 1986, 13, 533–549. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Christofides, N. Worst-Case Analysis of a New Heuristic for the Travelling Salesman Problem; Technical Report; Carnegie-Mellon Univ Pittsburgh Pa Management Sciences Research Group: Pittsburgh, PA, USA, 1976. [Google Scholar]
- Birge, J.R.; Louveaux, F. Introduction to Stochastic Programming; Springer Series in Operations Research and Financial Engineering; Springer: Berlin, Germany, 2011. [Google Scholar]
- Puterman, M.L. Markov Decision Processes: Discrete Stochastic Dynamic Programming; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Powell, W.B. Approximate Dynamic Programming: Solving the Curses of Dimensionality; Wiley Series in Probability and Statistics; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Seyr, H.; Muskulus, M. Interaction of repair time distributions with a weather model. In Proceedings of the 29th International Congress on Condition Monitoring and Diagnostics Engineering Management (COMADEM 2016), Xi’an, China, 20–22 August 2016. [Google Scholar]
- Seyr, H.; Muskulus, M. Value of information of repair times for offshore wind farm maintenance planning. J. Phys. Conf. Ser. 2016, 753, 092009. [Google Scholar] [CrossRef]
- Seyr, H.; Muskulus, M. How Does Accuracy of Weather Forecasts Influence the Maintenance Cost in Offshore Wind Farms? In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; International Society of Offshore and Polar Engineers: Mountain View, CA, USA, 2017. [Google Scholar]
- Hou, P.; Hu, W.; Chen, C.; Chen, Z. Overall Optimization for Offshore Wind Farm Electrical System. Wind Energy 2017, 20, 1017–1032. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2009.
- European Centre for Medium-Range Weather Forecasts (ECMWF). Public Datasets. Available online: https://www.ecmwf.int (accessed on 11 December 2018).
- Bundesamt für Seeschifffahrt und Hydrographie (BSH). FINO Datenbank. Available online: http://fino.bsh.de/ (accessed on 11 December 2018).
- NoordzeeWind. Wind Farm Egmond aan Zee Operations Report 2007; NoordzeeWind: Egmond aan Zee, The Netherlands, 2008. [Google Scholar]
- NoordzeeWind. Wind Farm Egmond aan Zee Operations Report 2008; NoordzeeWind: Egmond aan Zee, The Netherlands, 2009. [Google Scholar]
- NoordzeeWind. Wind Farm Egmond aan Zee Operations Report 2009; NoordzeeWind: Egmond aan Zee, The Netherlands, 2010. [Google Scholar]
- Centre for Environment, Fisheries and Aquaculture Science (CEFAS). CEFAS—WaveNet. Available online: www.cefas.co.uk/cefas-data-hub/wavenet/ (accessed on 11 December 2018).
- British Oceanographic Data Centre (BODC). BODC–Marine Data Available to Download. Available online: https://www.bodc.ac.uk/ (accessed on 11 December 2018).
- Norwegian Meteorological Institute. eKlima Free Access to Weather- and Climate Data from Norwegian Meteorological Institute from Historical Data to Real Time Observations. Available online: eKlima.met.no (accessed on 11 December 2018).
- Tolman, H. Validation of WAVEWATCH III Version 1.15 for a Global Domain; Technical Report, NOAA/NWS/NCEP/OMB Tech. Note 213; U.S. Department of Commerce, National Oceanic and Atmospheric Administration, National Weather Service, National Centers for Environmental Prediction: Washington, DC, USA, 2002.
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook; John Wiley & Sonss: Hoboken, NJ, USA, 2011. [Google Scholar]
- Tavner, P.; Xiang, J.; Spinato, F. Reliability analysis for wind turbines. Wind Energy 2007, 10, 1–18. [Google Scholar] [CrossRef]
- Arabian-Hoseynabadi, H.; Oraee, H.; Tavner, P. Failure modes and effects analysis (FMEA) for wind turbines. Int. J. Electr. Power Energy Syst. 2010, 32, 817–824. [Google Scholar] [CrossRef]
- Wilkinson, M.; Hendriks, B.; Spinato, F.; Gomez, E.; Bulacio, H.; Roca, J.; Tavner, P.; Feng, Y.; Long, H. Methodology and results of the ReliaWind reliability field study. In Proceedings of the European Wind Energy Conference and Exhibition 2010, EWEC 2010, Warsaw, Poland, 20–23 April 2010; Volume 3, pp. 1984–2004. [Google Scholar]
- Faulstich, S.; Hahn, B.; Tavner, P.J. Wind Turbine downtime and its importance for offshore deployment. Wind Energy 2011, 14, 327–337. [Google Scholar] [CrossRef]
- Lin, Y.; Tu, L.; Liu, H.; Li, W. Fault analysis of wind turbines in China. Renew. Sustain. Energy Rev. 2016, 55, 482–490. [Google Scholar] [CrossRef]
- Reder, M.; Gonzalez, E.; Melero, J.J. Wind turbine failures—Tackling current problems in failure data analysis. J. Phys. Conf. Ser. 2016, 753, 072027. [Google Scholar] [CrossRef]
- Stiesdal, H.; Madsen, P.H. Design for reliability. In Proceedings of the Copenhagen Offshore Wind International Conference, Copenhagen, Denmark, 26–28 October 2005. [Google Scholar]
- Carroll, J.; McDonald, A.; McMillan, D. Failure rate, repair time and unscheduled O&M cost analysis of offshore wind turbines. Wind Energy 2016, 19, 1107–1119. [Google Scholar]
- Tavner, P. Offshore Wind Turbines: Reliability, Availability and Maintenance; Institution of Engineering and Technology: London, UK, 2012. [Google Scholar]
- Malcolm, D.J.; Hansen, A.C. WindPACT Turbine Rotor Design Study: June 2000–June 2002 (Revised); Technical Report; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2006.
- Det Norske Veritas (DNV). DNV-OS-H101. Marine operations, general. In DNV Offshore Standards (OS) H; DNV: Oslo, Norway, 2011; Volume 101. [Google Scholar]
- Dalgic, Y.; Dinwoodie, I.A.; Lazakis, I.; McMillan, D.; Revie, M. Optimum CTV Fleet Selection for Offshore Wind Farm O&M Activities. In Proceedings of the European Safety and Reliability Conference ESREL 2014, Wroclaw, Poland, 14–18 September 2014. [Google Scholar]
- Van Bussel, G.; Schöntag, C. Operation and maintenance aspects of large offshore windfarms. In Proceedings of the European Wind Energy Conference, Dublin Castle, Ireland, October 1997; Bookshop for Scientific Publications: Slane County Meath, Republic of Ireland, 1997; pp. 272–275. [Google Scholar]
- Al-Salem, K.; Al-Nassar, W.; Tayfun, A. Risk analysis for capsizing of small vessels. Ocean Eng. 2006, 33, 788–797. [Google Scholar] [CrossRef]
- Dai, L.; Ehlers, S.; Rausand, M.; Utne, I.B. Risk of collision between service vessels and offshore wind turbines. Reliab. Eng. Syst. Saf. 2013, 109, 18–31. [Google Scholar] [CrossRef]
- Walker, R.T.; van Nieuwkoop-McCall, J.; Johanning, L.; Parkinson, R.J. Calculating weather windows: Application to transit, installation and the implications on deployment success. Ocean Eng. 2013, 68, 88–101. [Google Scholar] [CrossRef]
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Hansen, M.H.; Blasques, J.P.A.A.; Gaunaa, M.; Natarajan, A. The DTU 10-MW Reference Wind Turbine; Danish Wind Power Research: Fredericia, Denmark, 2013. [Google Scholar]
- Bak, T.; Graham, A.; Sapronova, A.; Chen, Z.; Knudsen, T.; Sørensen, J.D.; Florian, M.; Hou, P.; Asgarpour, M. Norcowe reference wind farm. Annual Report Norcowe 2014; Norcowe: Bergen, Norway, 2015; pp. 38–40. [Google Scholar]
- Artigao, E.; Honrubia-Escribano, A.; Gomez-Lazaro, E. Condition monitoring of a wind turbine doubly-fed induction generator through current signature analysis. J. Phys. Conf. Ser. 2017, 926, 012008. [Google Scholar] [CrossRef]
- Gonzalez, E.; Stephen, B.; Infield, D.; Melero, J.J. On the use of high-frequency SCADA data for improved wind turbine performance monitoring. J. Phys. Conf. Ser. 2017, 926, 012009. [Google Scholar] [CrossRef]
- Tautz-Weinert, J.; Watson, S. Condition monitoring of wind turbine drive trains by normal behaviour modelling of temperatures. In Proceedings of the Conference for Wind Power Drives 2017: Tagungsband zur Konferenz, BoD–Books on Demand, Aachen, Germany, 7–8 March 2017; Volume 3, p. 359. [Google Scholar]



{kind=link}
{kind=link}
| Publication | Factors Mentioned |
|---|---|
| Henderson et al. [9] | accessibility, reliability |
| Nielsen and Sørensen [10] | weather, power production, damage, inspections, repairs, transport strategies, rate of interest on capital |
| Dinwoodie et al. [11] | failures of turbines, repair time, wave height, wind speed, weather windows, the number of turbines, vessel availability, spares provisions |
| Scheu et al. [12] | weather, component failures, vessel fleet size, vessel type, size of the maintenance crew, travel time, maintenance strategy |
| Besnard et al. [13] | location of maintenance accommodation, crew transfer vessels (type and number), use of helicopters, work shift organization, spare part stock management, technical support, crane ship availability (purchase or contracting), environmental conditions (dependent on time and season), economical parameters (electricity prices, vessel charter costs) |
| Dinwoodie et al. [14] | as Dinwoodie et al. [11] and costs |
| Halvorsen-Weare et al. [15] | investment costs, vessel costs (time charter, variable costs), failure probabilities, downtime costs, weather data |
| Hofmann and Sperstad [16] | weather (including uncertainty), failure rates, electricity price, price for vessels (costs, fleet composition, types, quantity), workers (shift length, quantity), location of maintenance base, types of maintenance |
| Endrerud et al. [17] | component failures, weather conditions, vessels (availability, operational limits, costs), maintenance technicians, repair time, wind farm layout, cost of spare parts, logistics (warehousing and other costs) |
| Perveen et al. [18] | protection methodologies, the occurrence of cable faults and component failures, the repair strategy, wind speed forecasts and condition monitoring systems |
| Sperstad et al. [19] | as Hofmann and Sperstad [16] |
| Dalgic et al. [20] | climate parameters (wind speed, wave height), transportation systems (weather constraints, mobilization time, charter costs), turbine specific information (power curve, failure distribution), costs |
| Endrerud and Liyanage [21] | local weather, turbines, failures, vessels (operational limits, charter costs), costs of spare parts, electricity market price, maintenance crew |
| Sahnoun et al. [22] | turbines (rating and quantity), distance from shore, wind quality, water depth, accessibility, availability of workers, spare parts, boats and cranes, failure modes |
| Shafiee et al. [23] | failure rate of subsystems, delivery time of spare parts, availability of transport vessels, accessibility (weather dependence) |
| Gintautas and Sørensen [24] | vessel specific weather limits (wave height, wind speed), weather forecasts, operation failure |
| Raknes et al. [25] | transportation costs, downtime costs, penalty cost for postponed maintenance, technician transfer time, vessel properties (two types), weather conditions |
| Rinaldi et al. [26] | dynamics of the farm, repair time, spare part stock, interaction among components, accessibility (wave height, wind speed), turbines (rating and quantity), met ocean data, failure distributions, vessel mobilization time |
| Nguyen and Chou [27] | system reliability, cost effectiveness, weather condition, maintenance duration, production loss during maintenance, market electricity price, wind farm location |
| Publication | Failure Modeling | Degradation Modeling | Number of Components |
|---|---|---|---|
| Eecen et al. [28] | operational data | ||
| Obdam et al. [29] | updated failure rates | ||
| Nielsen and Sørensen [10] | damage growth function | ||
| Dinwoodie et al. [11] | Markov chain, Poisson distributed failures | Weibull distributed failure rate | 4 |
| Douard et al. [30] | Poisson distributed failures | Weibull distributed failure rate | |
| Scheu et al. [12] | Poisson process | 12 | |
| Dinwoodie et al. [14] | Weibull distributed failures | ||
| Halvorsen-Weare et al. [15] | 4 | ||
| Hofmann and Sperstad [16] | Bernoulli process | 3 | |
| Asgarpour and van de Pieterman [31] | component specific failure rate | updated based on data | |
| Endrerud et al. [17] | non-homogeneous Poisson process | Weibull distributed failure rate | 19 |
| Shafiee and Finkelstein [32] | Poisson process | Gamma process | bearings only |
| Sperstad et al. [19] | Bernoulli process | 3 | |
| Dalgic et al. [20] | component specific failure rate | ||
| Endrerud and Liyanage [21] | non-homogeneous Poisson process | Weibull distributed failure rate | 19 |
| Joschko et al. [33] | occurrence probability | including errors | |
| Sahnoun et al. [22] | Poisson process | time-based and random | |
| Abdollahzadeh et al. [34] | Weibull distributions | 4 | |
| Alaswad and Xiang [35] | discrete deterioration: Markov process continuous deterioration: Wiener process, Gamma process and Inverse Gaussian process | ||
| Asgarpour and Sørensen [36] | Poisson process | time-based degradation (electrical) discrete deterioration (mechanical) continuous deterioration (structural) | 3 |
| Pliego Marugán et al. [37] | Poisson process, periodic failures | constant failure rate, exponential increase, linear increase | 4 |
| Tibaldi et al. [38] | linear fatigue accumulation | ||
| Rinaldi et al. [26] | Poisson process, Weibull distributed | adjusted failure rates (based on maintenance, fault category, environmental conditions) | |
| Scheu et al. [39] | 9 different distributions | 12 | |
| Welte et al. [40] | stochastic degradation process | ||
| Nguyen and Chou [27] | time-based failure rate | Weibull distribution | 6 |
| Stock-Williams and Swamy [41] | operational data | ||
| Wang et al. [42] | Weibull distributed lifetime |
| Publication | Preventive Maintenance | Condition Monitoring | Condition-Based Maintenance | Corrective Maintenance |
|---|---|---|---|---|
| Van Bussel and Bierbooms [46] | ✓ | ✓ | ||
| Nilsson and Bertling [67] | ✓ | ✓ | ||
| Nielsen and Sørensen [10] | ✓ | ✓ | ||
| Douard et al. [30] | ✓ | ✓ | ✓ | ✓ |
| Fu and Yuan [70] | ✓ | |||
| Scheu et al. [12] | ✓ | |||
| Hofmann and Sperstad [16] | ✓ | ✓ | ✓ | |
| Endrerud et al. [17] | ✓ | ✓ | ||
| Shafiee and Finkelstein [32] | ✓ | |||
| Sperstad et al. [19] | ✓ | ✓ | ✓ | |
| Yang et al. [71] | ✓ | |||
| Endrerud and Liyanage [21] | ✓ | ✓ | ||
| Dalgic et al. [20] | ✓ | ✓ | ||
| Sahnoun et al. [22] | ✓ | ✓ | ✓ | |
| Abdollahzadeh et al. [34] | ✓ | ✓ | ||
| Alaswad and Xiang [35] | ✓ | |||
| Ambühl et al. [63] | ✓ | |||
| Asgarpour and Sørensen [36] | ✓ | ✓ | ||
| Bach-Andersen et al. [72] | ✓ | |||
| Helsen et al. [73] | ✓ | |||
| Pliego Marugán et al. [37] | ✓ | ✓ | ||
| Pattison et al. [74] | ✓ | ✓ | ||
| Shafiee et al. [23] | ✓ | ✓ | ||
| Raknes et al. [25] | ✓ | ✓ | ||
| Rinaldi et al. [26] | ✓ | |||
| Leite et al. [75] | ✓ | |||
| Welte et al. [40] | ✓ | |||
| Artigao et al. [76] | ✓ | |||
| Nguyen and Chou [27] | ✓ | |||
| Wang et al. [42] | ✓ | ✓ |
| Publication | Monte Carlo | Discrete Events | Markov | Others |
|---|---|---|---|---|
| Van Bussel and Bierbooms [46] | ✓ | ✗ | ✗ | ✗ |
| Pérez et al. [80] | ✓ | ✓ | ✗ | ✗ |
| Pérez et al. [80] | ✓ | ✓ | ✗ | ✗ |
| Byon et al. [81] | ✓ | ✓ | ✗ | ✗ |
| Pérez et al. [82] | ✓ | ✓ | ✗ | ✗ |
| Douard et al. [30] | ✓ | ✓ | ✓ | ✗ |
| Scheu et al. [12] | ✓ | ✓ | ✓ | ✗ |
| Dinwoodie et al. [14] | ✓ | ✓ | ✗ | Weibull distribution, autoregressive model |
| Hofmann and Sperstad [16] | ✓ | ✓ | ✓ | binomial process |
| Leigh and Dunnett [83] | ✗ | ✗ | ✗ | Petri nets |
| Endrerud et al. [17] | ✓ | ✓ | ✗ | Poisson process, agent-based method |
| Dalgic et al. [20] | ✓ | ✗ | ✗ | multivariate autoregressive model |
| Endrerud and Liyanage [21] | ✓ | ✓ | ✗ | Poisson process, agent-based method |
| Joschko et al. [33] | ✓ | ✗ | ✗ | Business Process Model Notation |
| Sahnoun et al. [22] | ✓ | ✗ | ✗ | multi-agent system |
| Gintautas and Sørensen [24] | ✗ | ✗ | ✗ | stochastic model |
| Raknes et al. [25] | ✗ | ✗ | ✗ | mixed-integer solver, rolling-horizon heuristic |
| Rinaldi et al. [26] | ✓ | ✗ | ✗ | ✗ |
| Stock-Williams and Swamy [41] | ✗ | ✗ | ✗ | genetic algorithm |
| Publication | ECMWF [105] | FINO [106] | Others |
|---|---|---|---|
| Dinwoodie et al. [11] | ✓ | NoordzeeWind [107,108,109] Centre for Environment, Fisheries and Aquaculture Science (CEFAS) [110] British Oceanographic Data Centre (BODC) [111] | |
| Scheu et al. [12] | ✓ | ||
| Dinwoodie et al. [14] | ✓ | ||
| Feuchtwang and Infield [61] | Barrow and Scroby Sands wind farms | ||
| Halvorsen-Weare et al. [15] | EKLIMA [112] | ||
| Hofmann and Sperstad [16] | Offshore oil platform | ||
| Endrerud and Liyanage [21] | ✓ | ||
| Dalgic et al. [20] | ✓ | ||
| Sahnoun et al. [22] | Le Havre airport (wind speed) Rayleigh distribution [114] (wave height) Uniform distribution (lightning) | ||
| Asgarpour and Sørensen [36] | ✓ | ||
| [101] | ✓ | ||
| Rinaldi et al. [26] | Wavewatch III [113] | ||
| Seyr and Muskulus [65] | ✓ | ✓ | |
| Taylor and Jeon [66] | ✓ |
| Publication | [123] | [117] | [118] | [114] | [121] | [107,108,109] | [4] | [122] | No Info |
|---|---|---|---|---|---|---|---|---|---|
| Dinwoodie et al. [11] | ✓ | ✓ | |||||||
| Scheu et al. [12] | ✓ | ||||||||
| Dinwoodie et al. [14] | ✓ | ||||||||
| Hofmann and Sperstad [16] | ✓ | ||||||||
| Endrerud et al. [17] | ✓ | ✓ | |||||||
| Dalgic et al. [20] | ✓ | ||||||||
| Endrerud and Liyanage [21] | ✓ | ||||||||
| Sahnoun et al. [22] | ✓ | ||||||||
| Pliego Marugán et al. [37] | ✓ | ||||||||
| [101] | ✓ | ||||||||
| Rinaldi et al. [26] | ✓ |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seyr, H.; Muskulus, M. Decision Support Models for Operations and Maintenance for Offshore Wind Farms: A Review. Appl. Sci. 2019, 9, 278. https://doi.org/10.3390/app9020278
Seyr H, Muskulus M. Decision Support Models for Operations and Maintenance for Offshore Wind Farms: A Review. Applied Sciences. 2019; 9(2):278. https://doi.org/10.3390/app9020278
Chicago/Turabian StyleSeyr, Helene, and Michael Muskulus. 2019. "Decision Support Models for Operations and Maintenance for Offshore Wind Farms: A Review" Applied Sciences 9, no. 2: 278. https://doi.org/10.3390/app9020278
APA StyleSeyr, H., & Muskulus, M. (2019). Decision Support Models for Operations and Maintenance for Offshore Wind Farms: A Review. Applied Sciences, 9(2), 278. https://doi.org/10.3390/app9020278