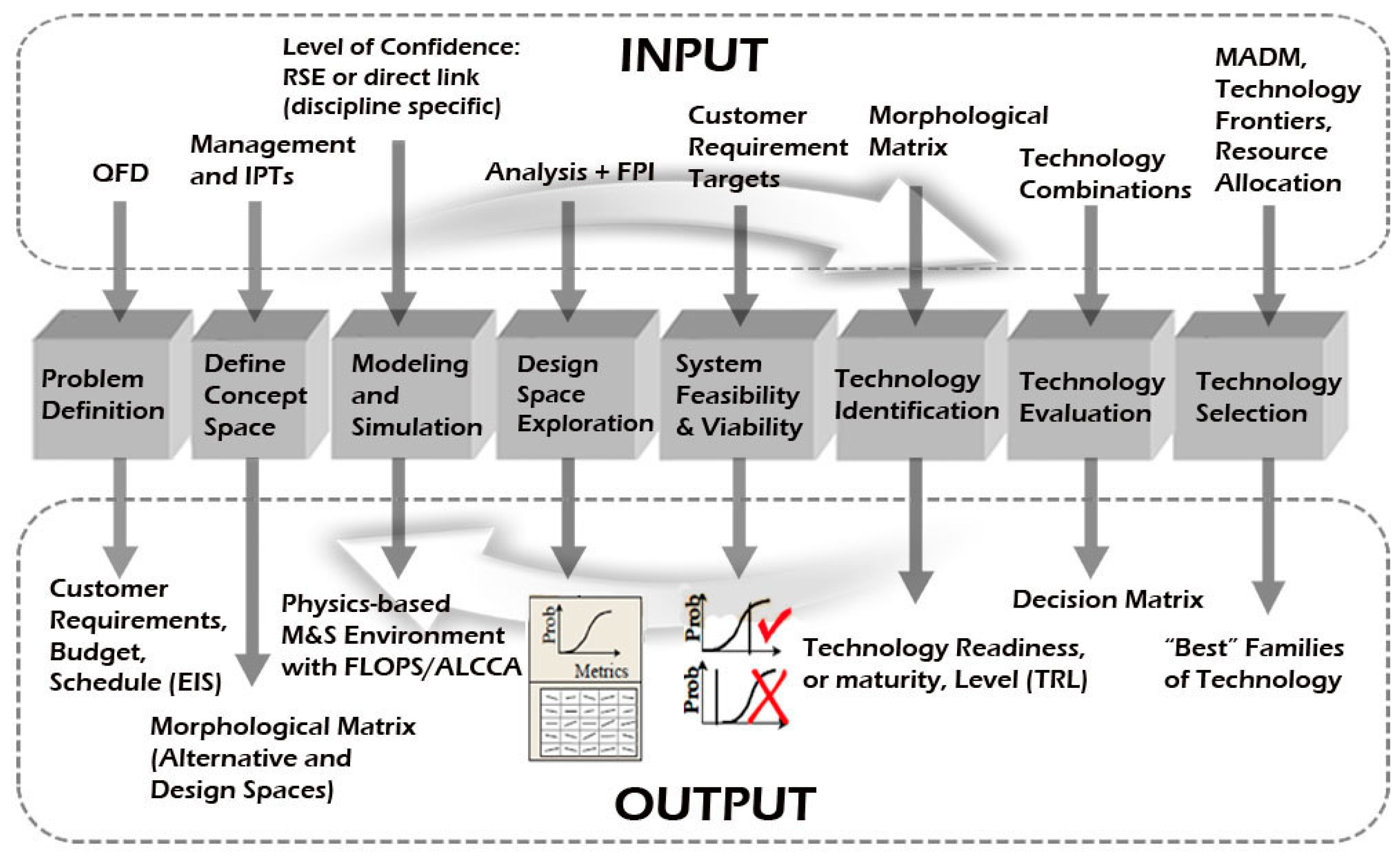
Figure 1.
Procedure and composition of the technology identification, evaluation, and selection (TIES) method. RSE, Response Surface Evaluation; QFD, Quality Function Deployment; IPT, Integrated Product Team; FPI, Fuzzy Performance Index; MADM, Multi Attribute Decision Making; EIS, Enterprise Investment Scheme; FLOPS, Flight Optimization System Program; ALCCA, Aircraft Life Cycle Cost Analysis.
Figure 1.
Procedure and composition of the technology identification, evaluation, and selection (TIES) method. RSE, Response Surface Evaluation; QFD, Quality Function Deployment; IPT, Integrated Product Team; FPI, Fuzzy Performance Index; MADM, Multi Attribute Decision Making; EIS, Enterprise Investment Scheme; FLOPS, Flight Optimization System Program; ALCCA, Aircraft Life Cycle Cost Analysis.
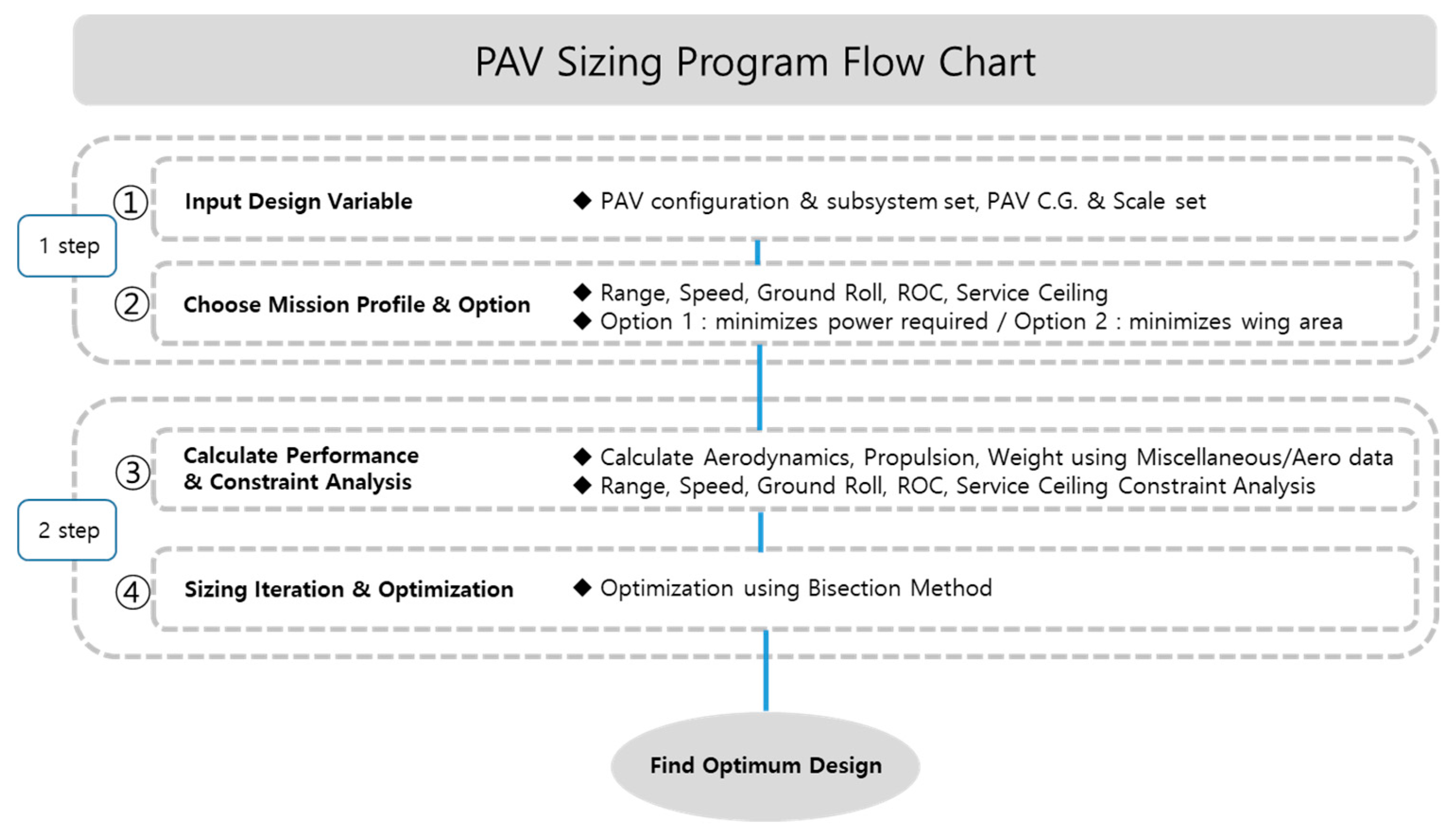
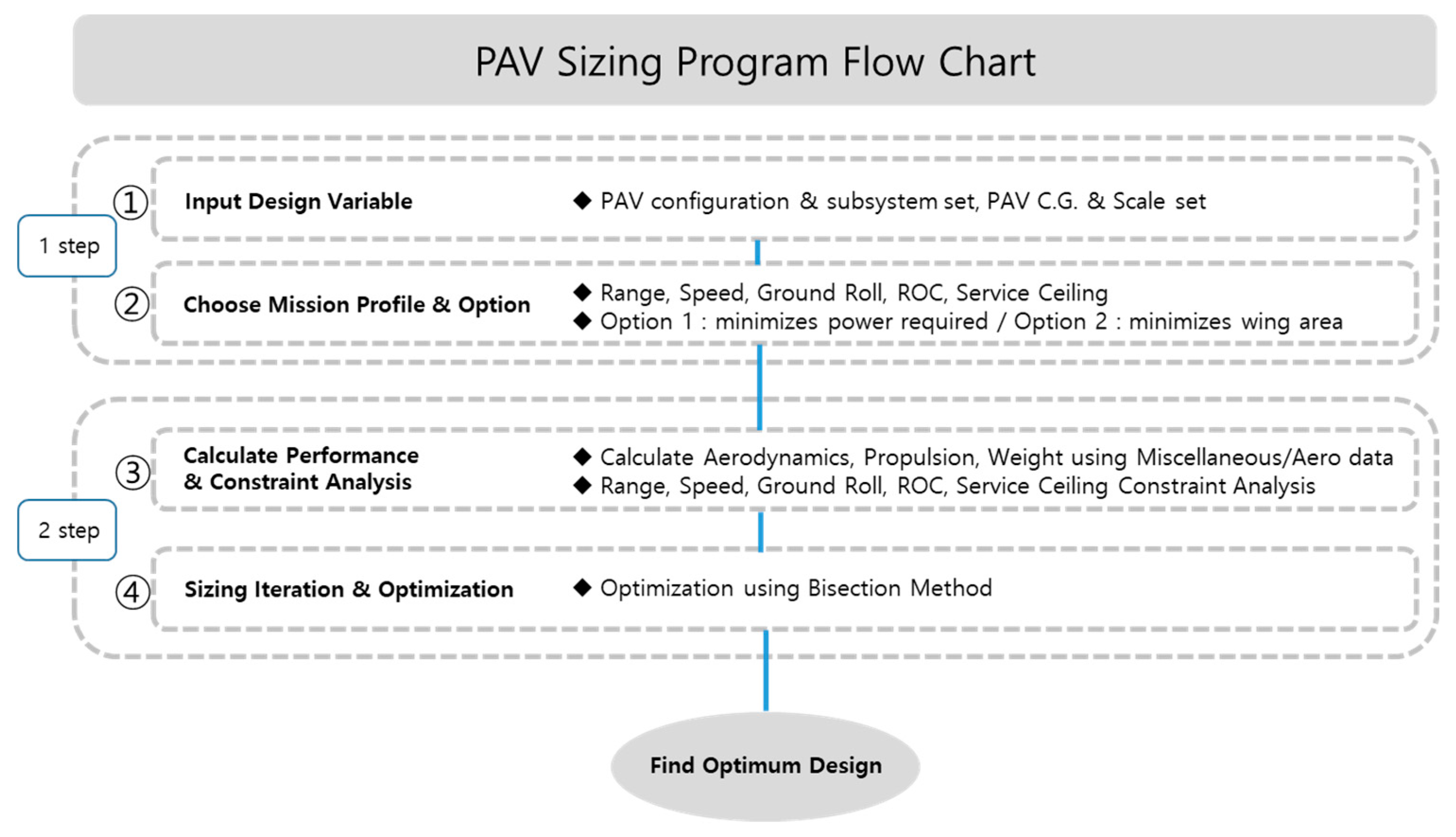
Figure 2.
Personal air vehicle (PAV) sizing program flow chart. C.G., Center of Gravity; ROC, Rate of Climb.
Figure 2.
Personal air vehicle (PAV) sizing program flow chart. C.G., Center of Gravity; ROC, Rate of Climb.
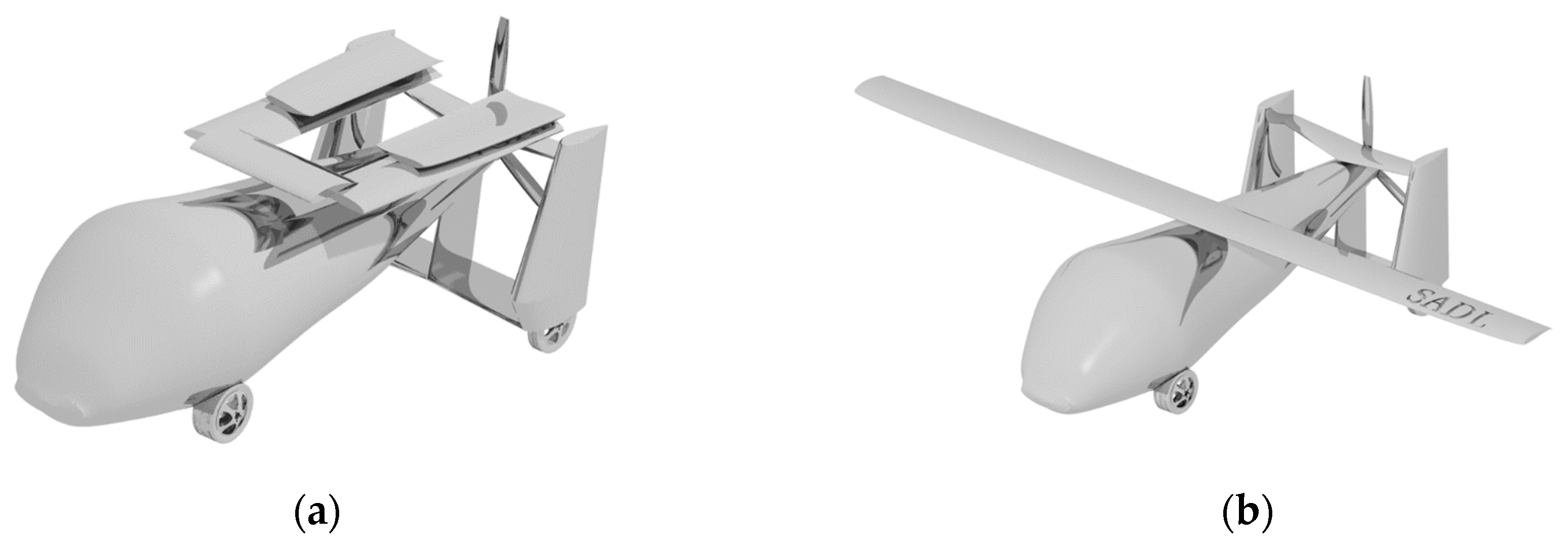
Figure 3.
PAV configuration: (a) description of drive mode; (b) description of flight mode.
Figure 3.
PAV configuration: (a) description of drive mode; (b) description of flight mode.
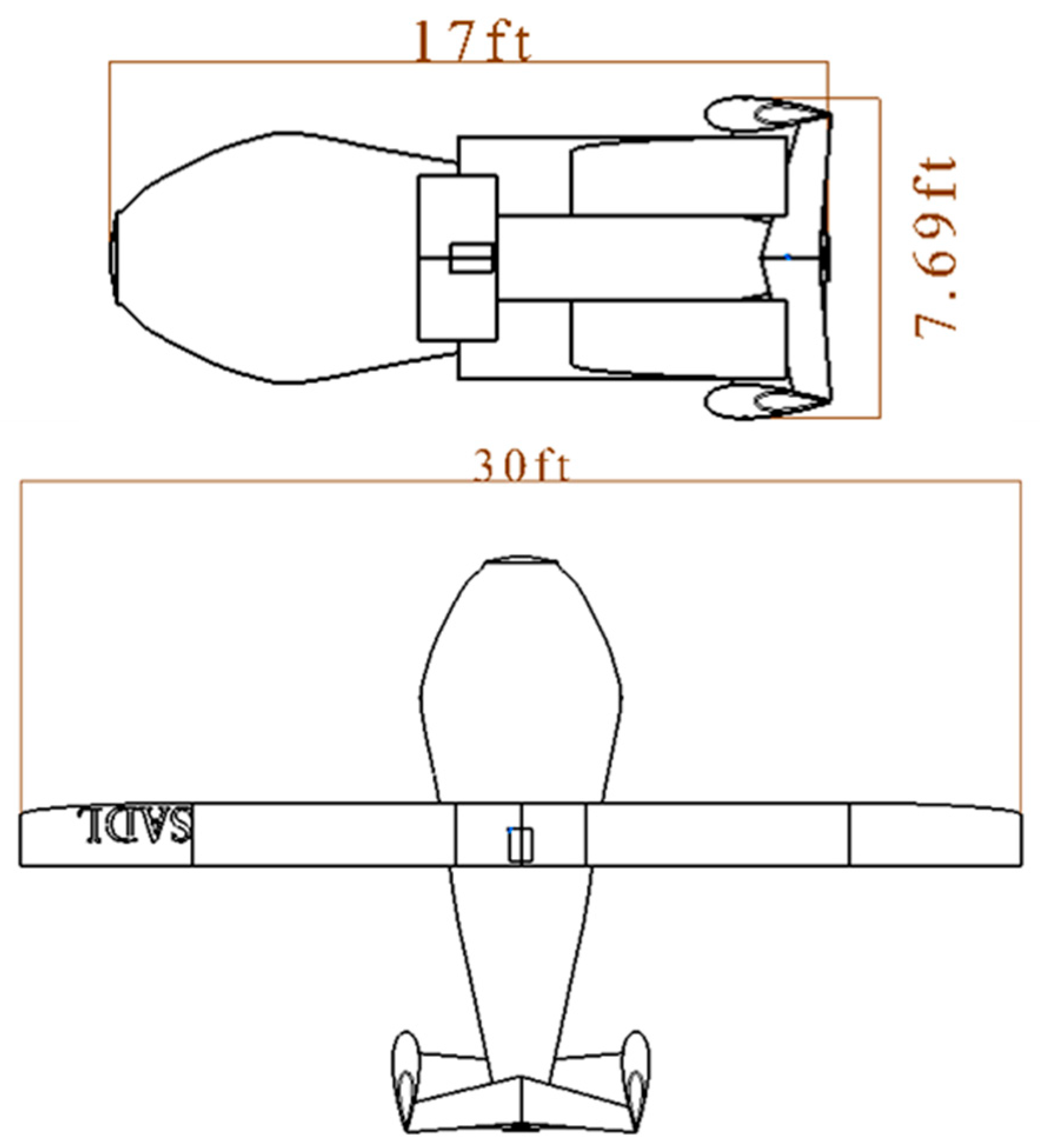
Figure 4.
Roadable PAV size dimension from CATIA.
Figure 4.
Roadable PAV size dimension from CATIA.
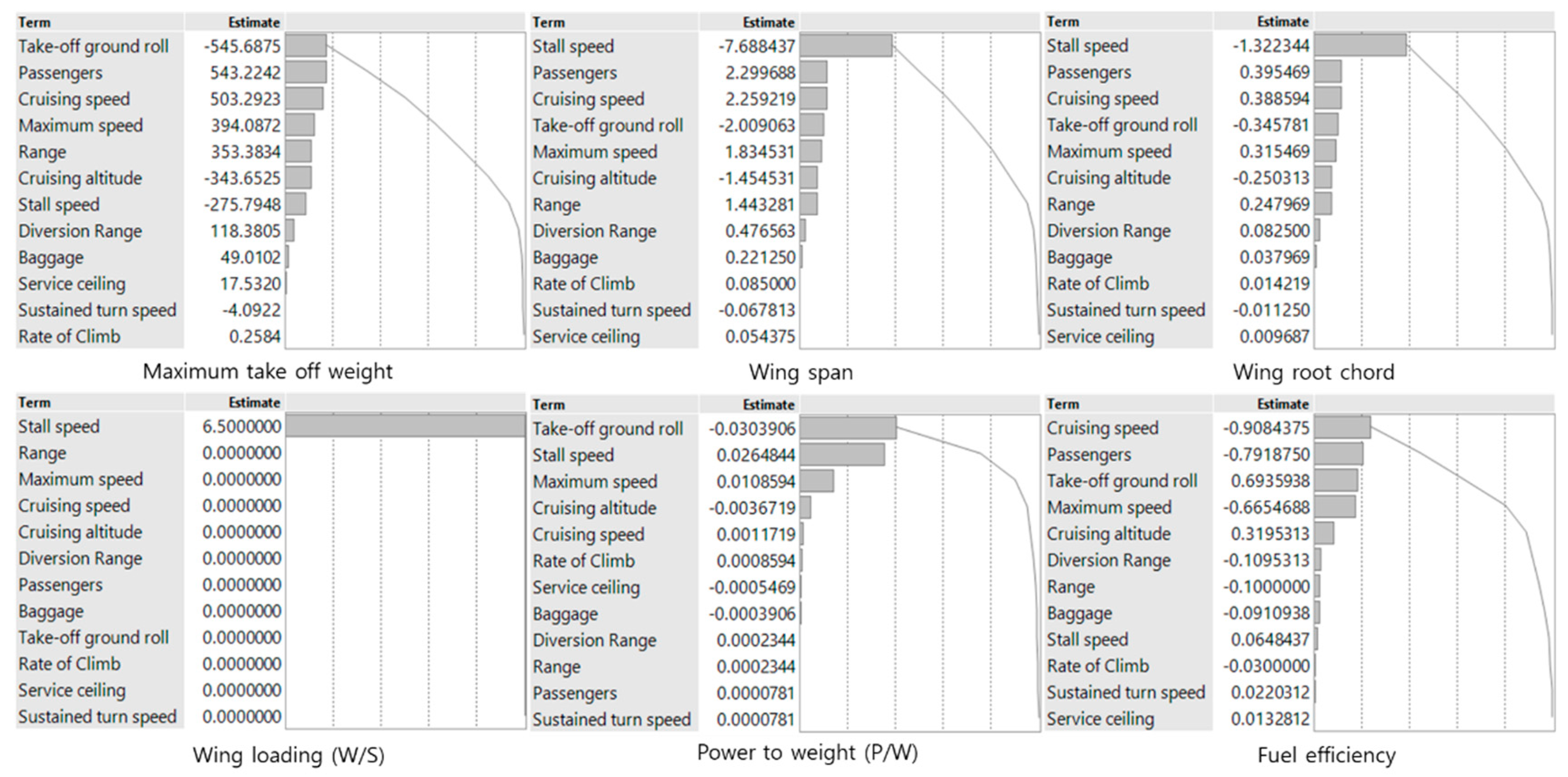
Figure 5.
Pareto plot of design objective parameters.
Figure 5.
Pareto plot of design objective parameters.
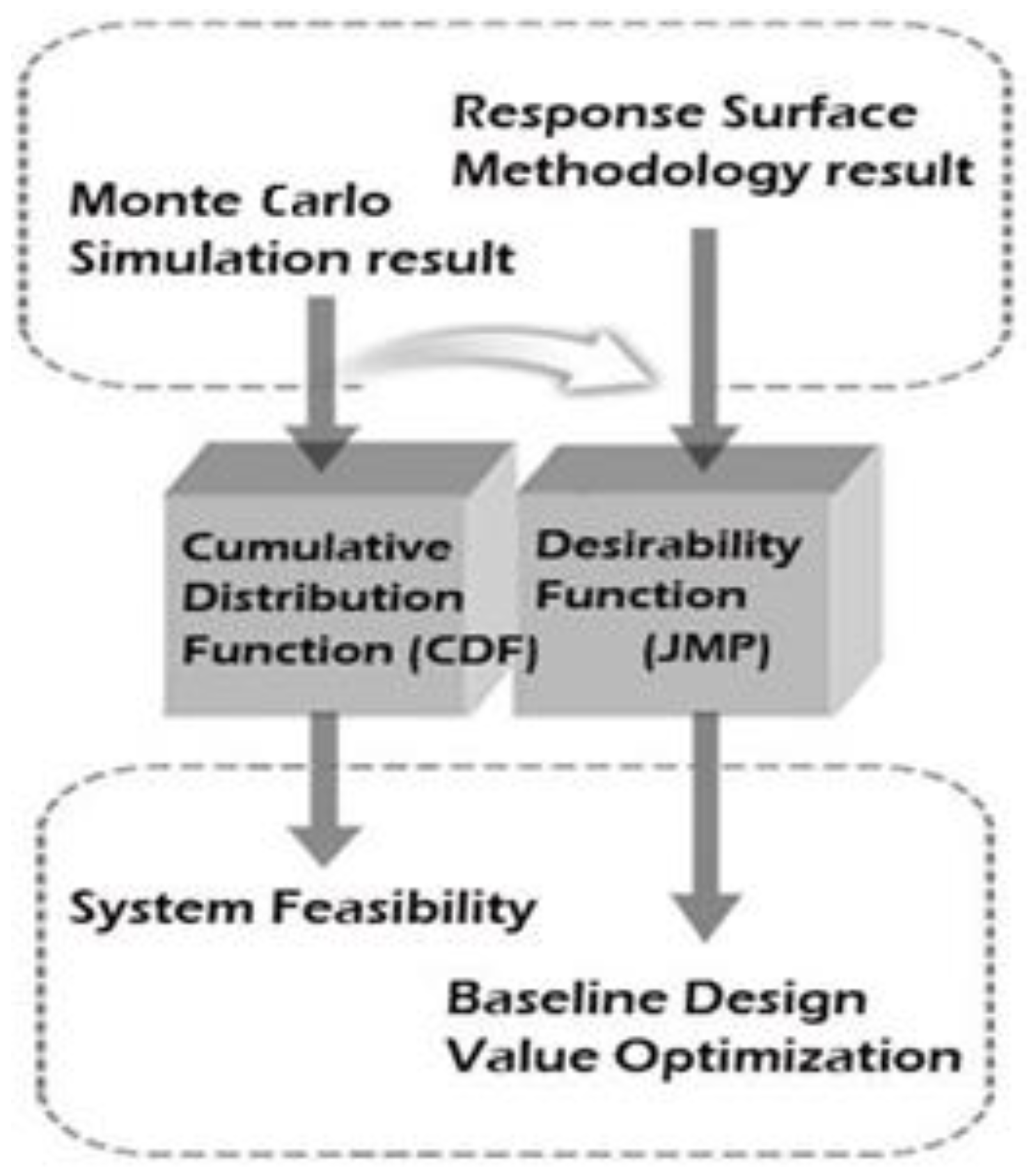
Figure 6.
System feasibility and viability determination procedure flow chart.
Figure 6.
System feasibility and viability determination procedure flow chart.
Figure 7.
Feasible design space for target design variables.
Figure 7.
Feasible design space for target design variables.
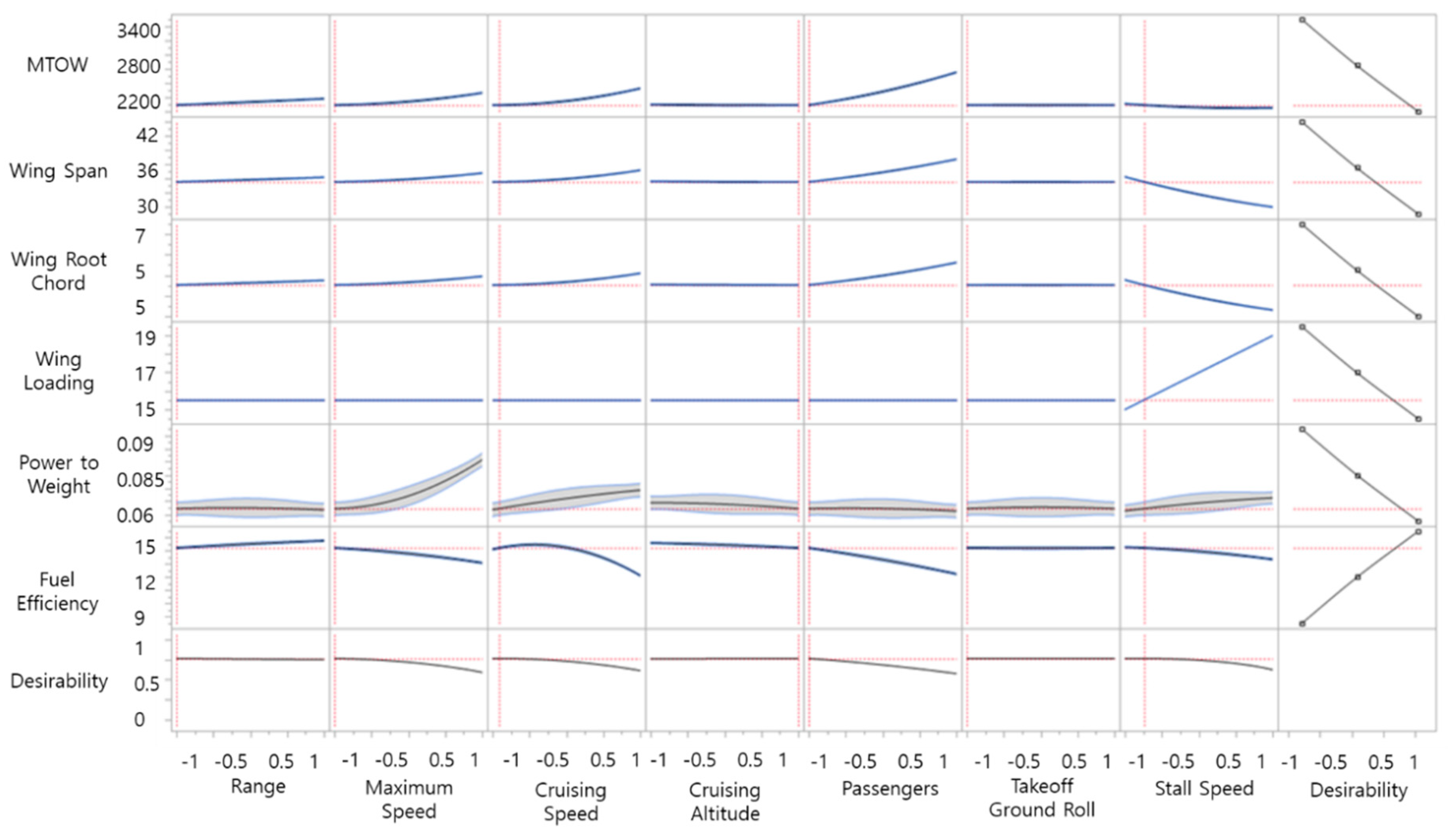
Figure 8.
Optimized responses vs. design variables.
Figure 8.
Optimized responses vs. design variables.
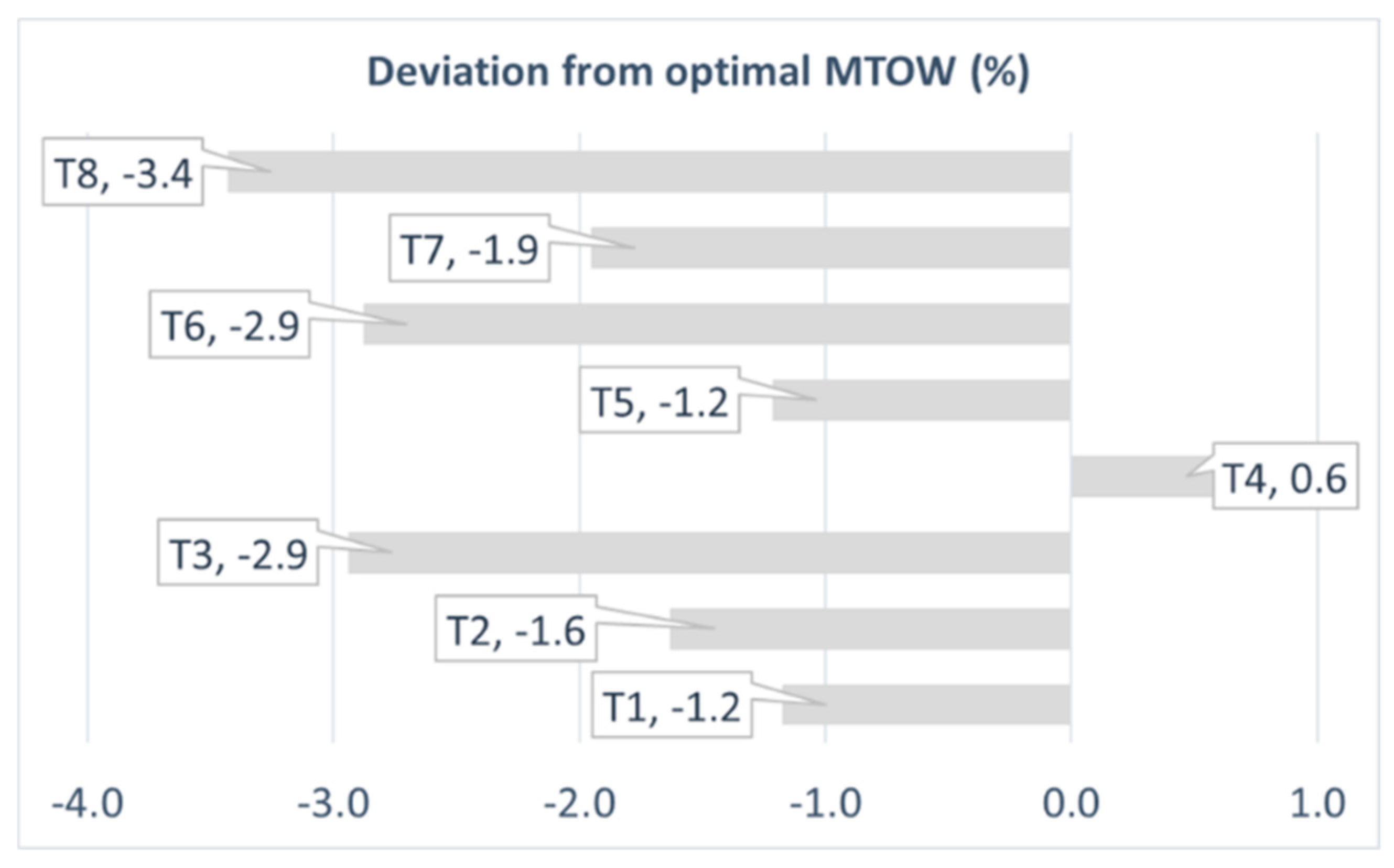
Figure 9.
Technology sensitivity analysis: deviation from optimal MTOW target value.
Figure 9.
Technology sensitivity analysis: deviation from optimal MTOW target value.
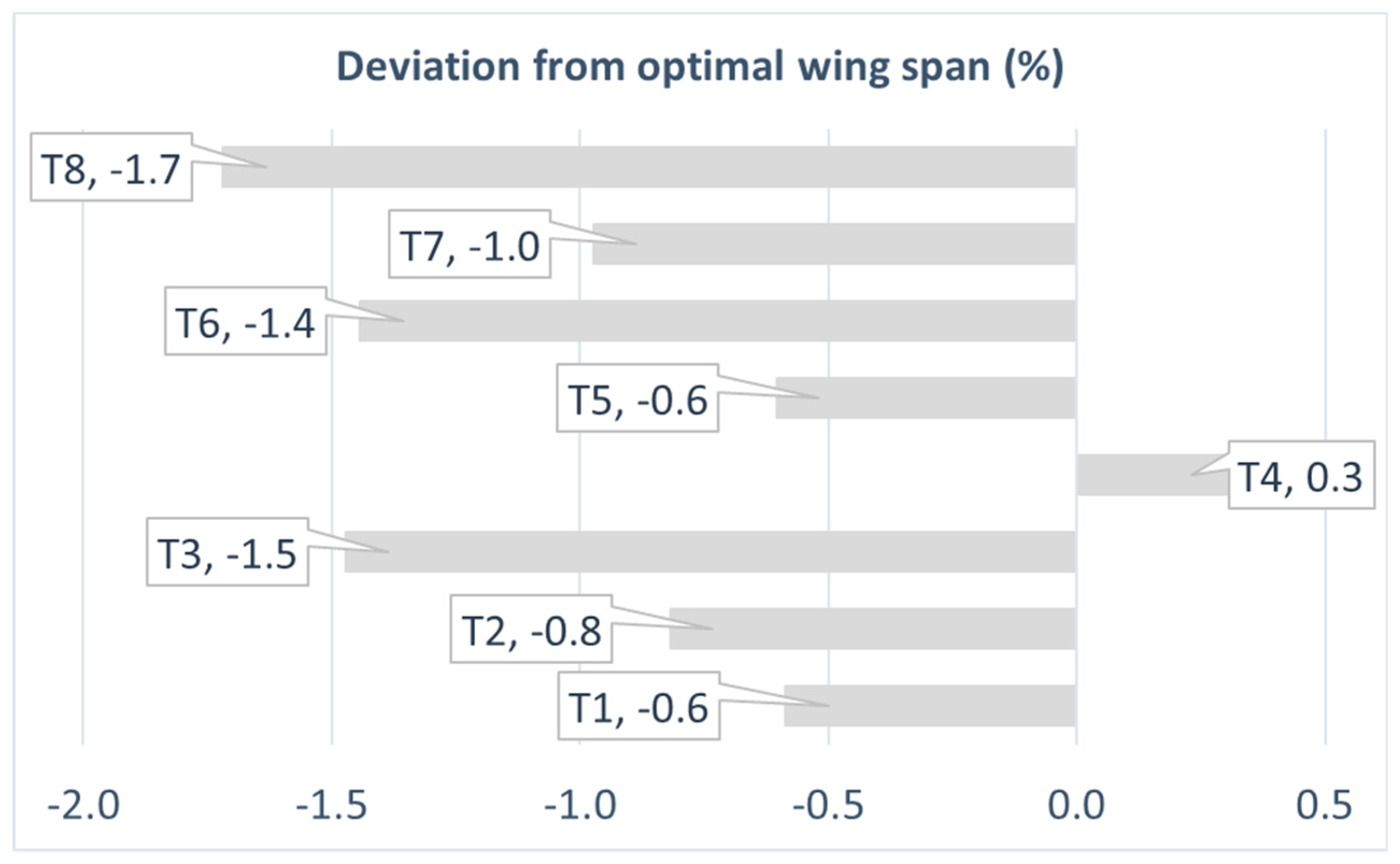
Figure 10.
Technology sensitivity analysis: deviation from optimal wing span target value.
Figure 10.
Technology sensitivity analysis: deviation from optimal wing span target value.
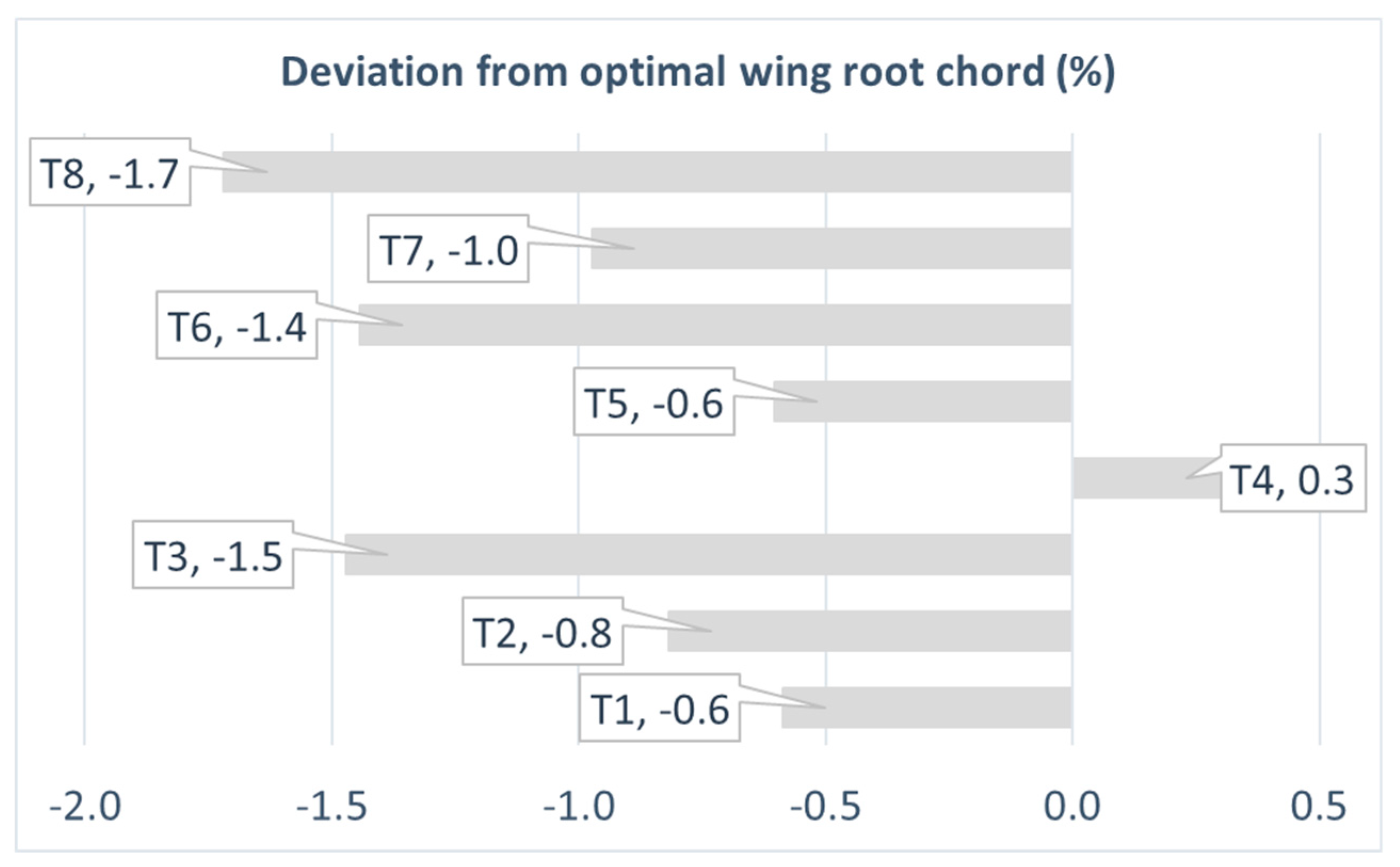
Figure 11.
Technology sensitivity analysis: deviation from optimal wing root chord target value.
Figure 11.
Technology sensitivity analysis: deviation from optimal wing root chord target value.
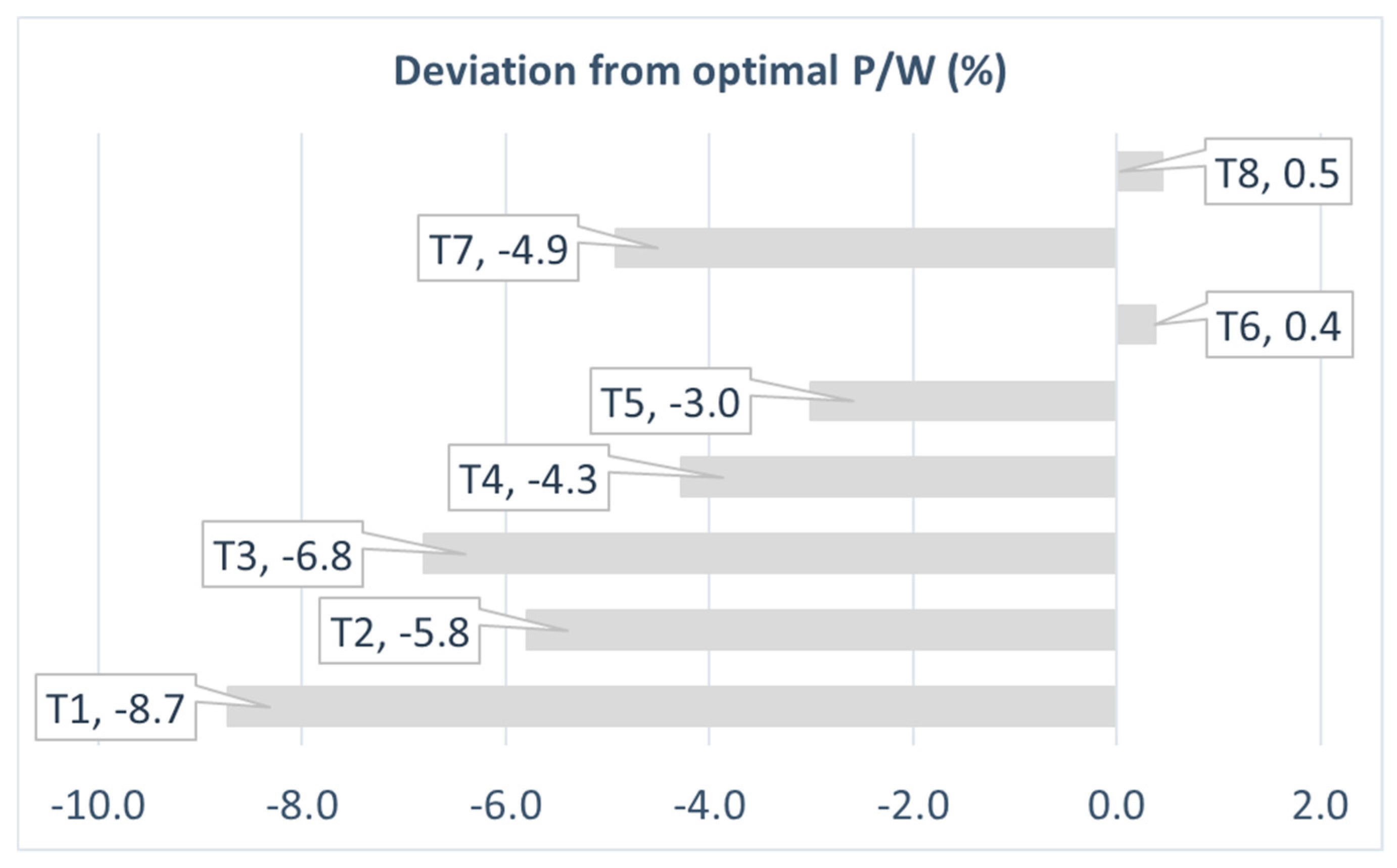
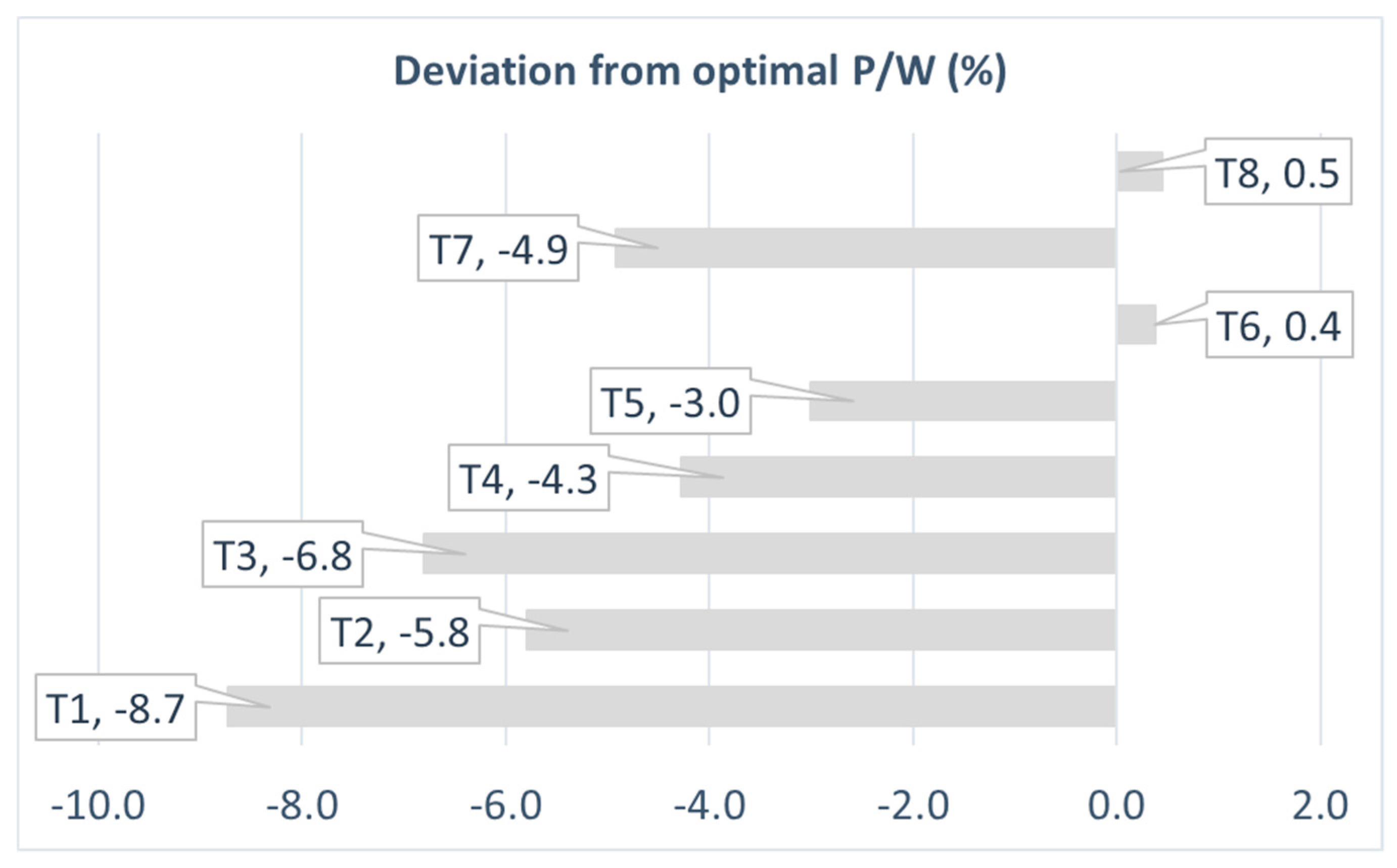
Figure 12.
Technology sensitivity analysis: deviation from optimal power-to-weight target value.
Figure 12.
Technology sensitivity analysis: deviation from optimal power-to-weight target value.
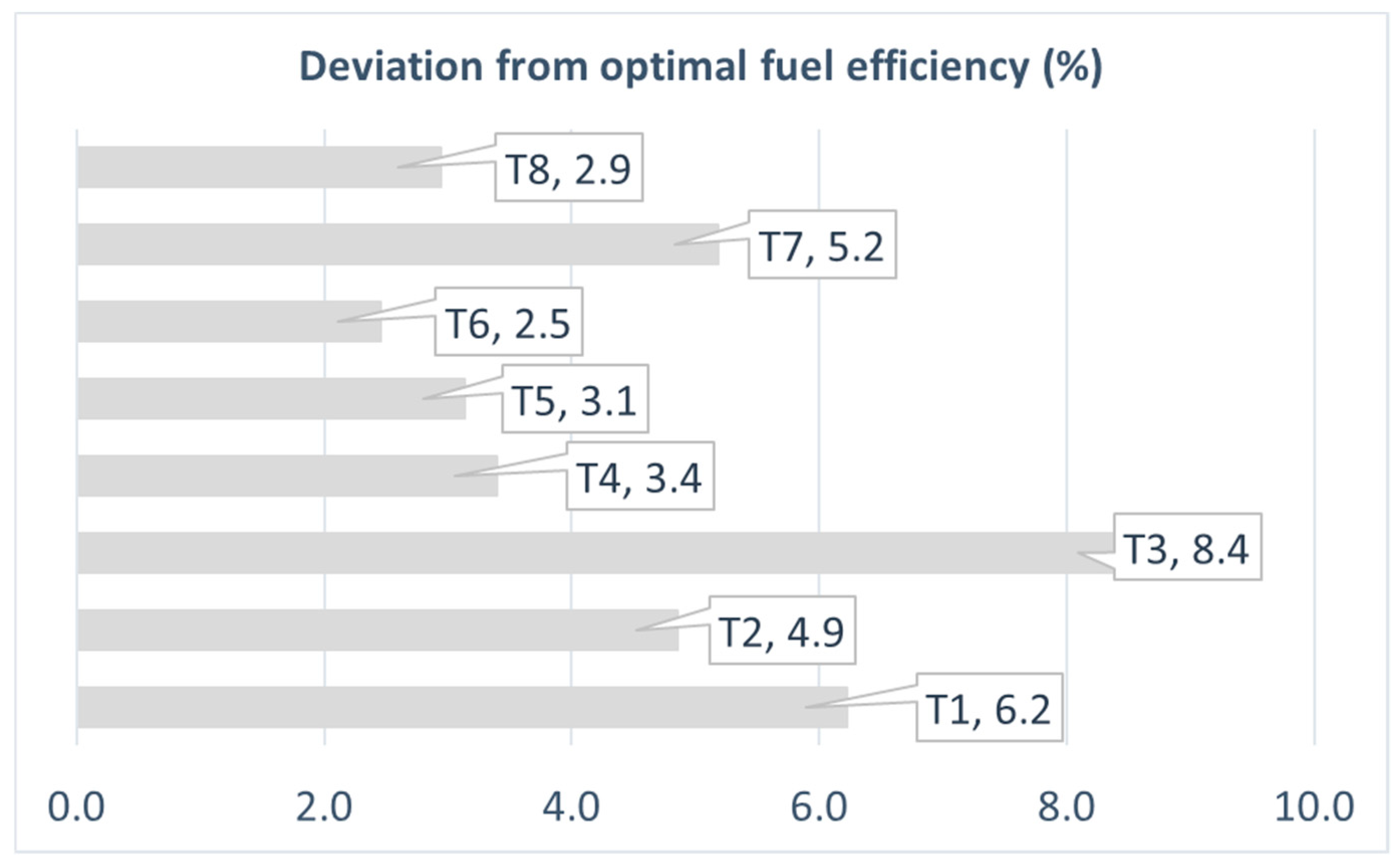
Figure 13.
Technology sensitivity analysis: deviation from optimal fuel efficiency target value.
Figure 13.
Technology sensitivity analysis: deviation from optimal fuel efficiency target value.
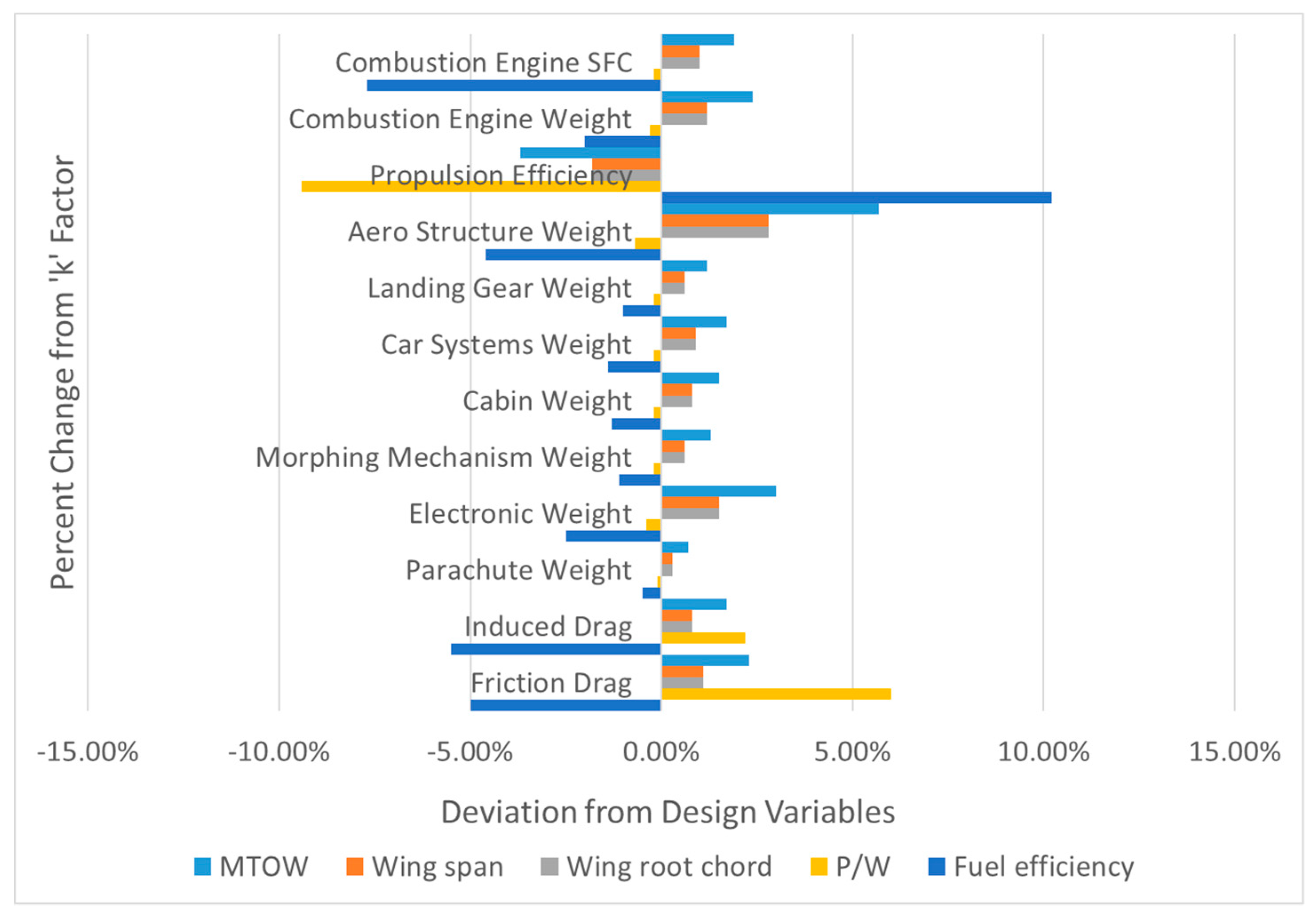
Figure 14.
K-factor sensitivity analysis: deviation of design variables 1 for 10% decrease of the k factor.
Figure 14.
K-factor sensitivity analysis: deviation of design variables 1 for 10% decrease of the k factor.
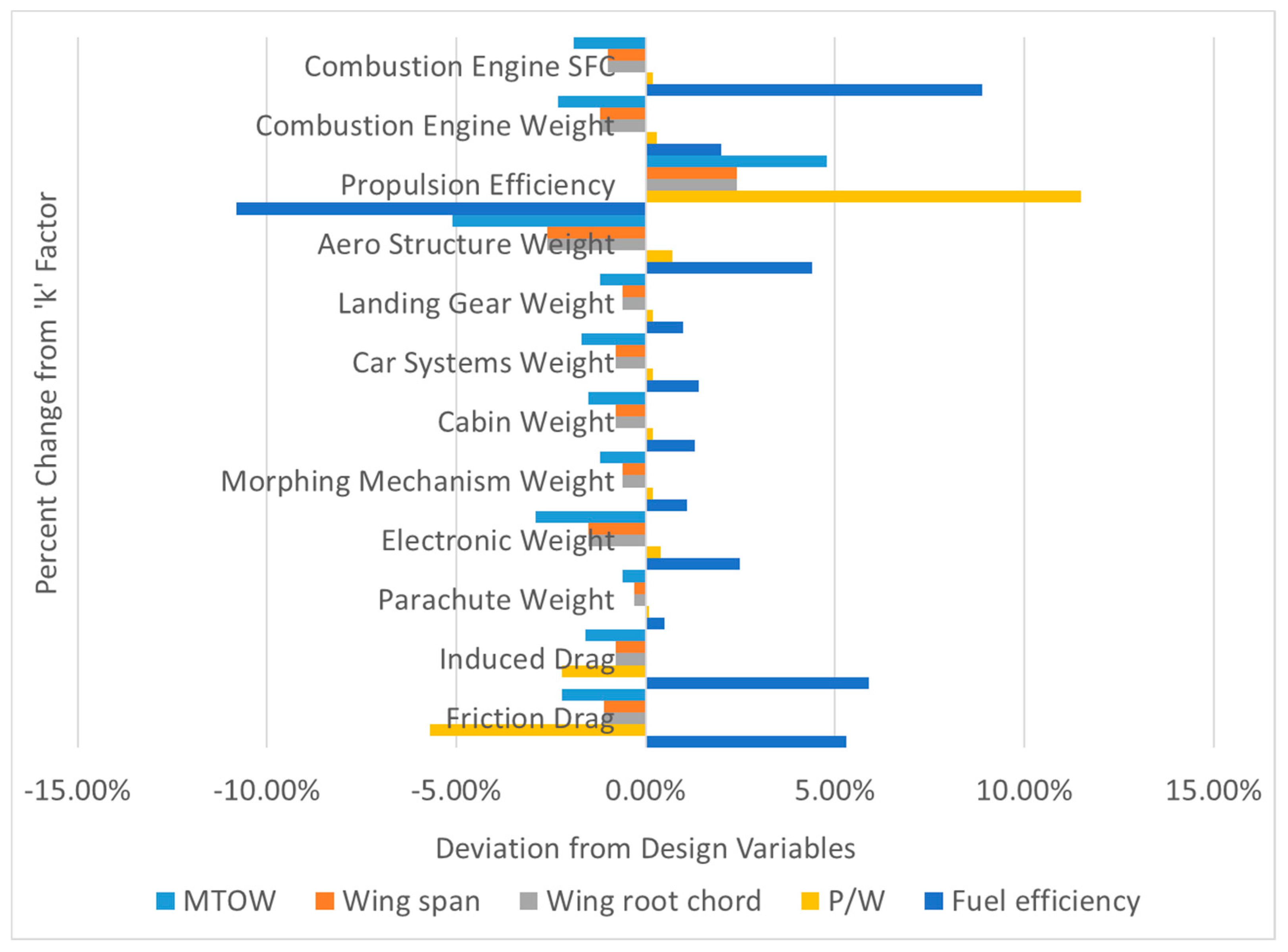
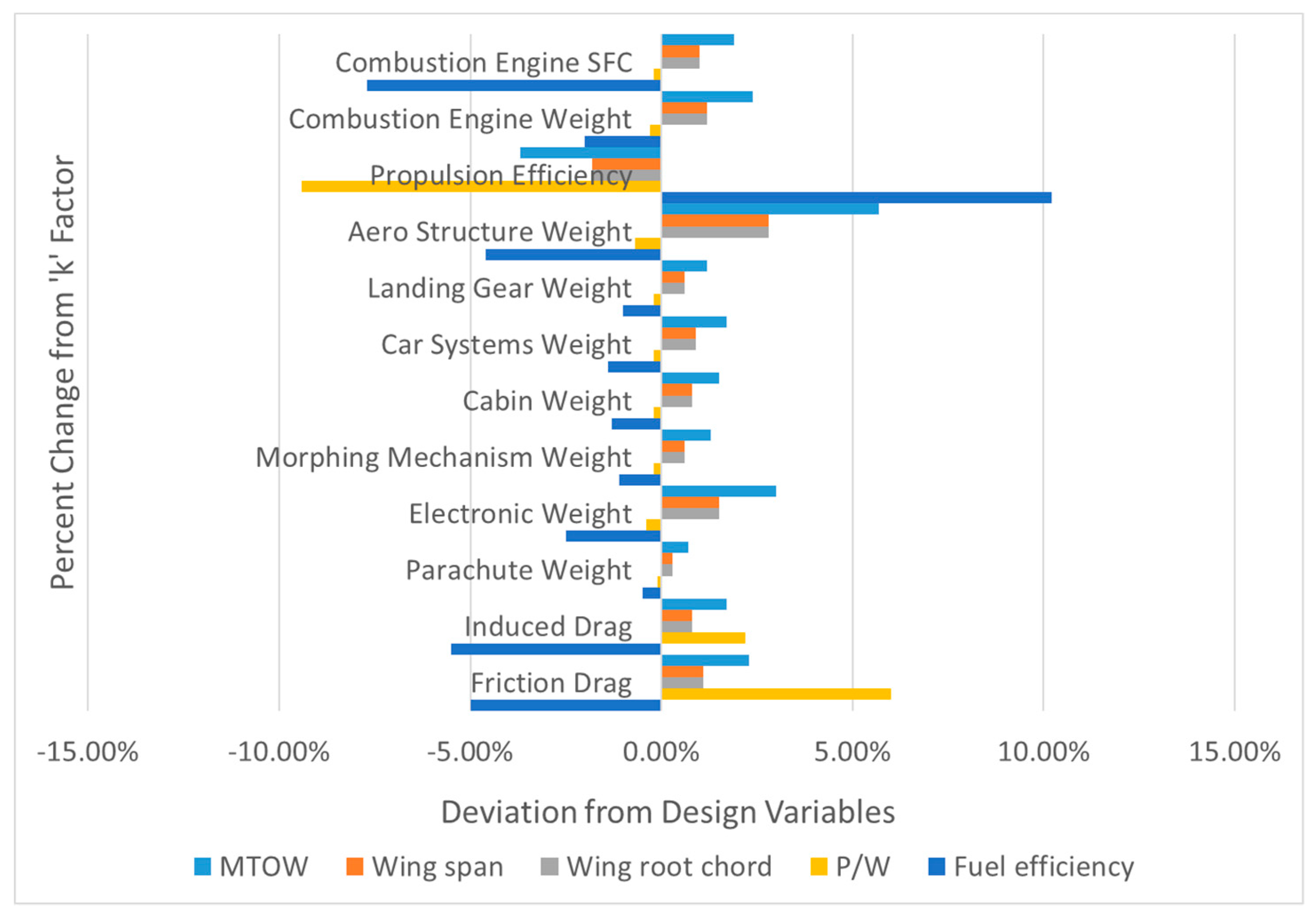
Figure 15.
K-factor sensitivity analysis: deviation of design variables 2 for 10% increase of the k factor.
Figure 15.
K-factor sensitivity analysis: deviation of design variables 2 for 10% increase of the k factor.
Table 1.
Design objective parameter target values.
Table 1.
Design objective parameter target values.
| Design Objective Parameters | Values | Units |
|---|
| Maximum takeoff weight | 2500 | lbs |
| Wing span | 40 | ft |
| Wing root chord | 5.3 | ft |
| Wing loading (W/S) | 17 | |
| Power-to-weight (P/W) | 0.07 | hp/lb |
| Fuel efficiency | | mpg |
Table 2.
Selected independent design parameters.
Table 2.
Selected independent design parameters.
| Independent Design Parameter | Minimum | Maximum | Baseline | Units |
|---|
| Range | 400 | 500 | 450 | nm |
| Maximum speed | 100 | 150 | 125 | knot |
| Cruising speed | 80 | 120 | 100 | knot |
| Cruising altitude | 7000 | 12,000 | 9500 | ft |
| Passengers | 1 | 2 | 2 | person |
| Takeoff ground roll | 1500 | 2000 | 1750 | ft |
| Stall speed | 45 | 50 | 47.5 | knot |
Table 3.
Coefficient of determination and adjusted R-squared of response surface equation (RSE).
Table 3.
Coefficient of determination and adjusted R-squared of response surface equation (RSE).
| Design Target Variables | | |
|---|
| MTOW | 0.99 | 0.99 |
| Wing span | 0.99 | 0.99 |
| Wing root chord | 0.99 | 0.99 |
| Wing loading (W/S) | 1 | 1 |
| Power-to-weight (P/W) | 0.92 | 0.90 |
Table 4.
Regression coefficients of a response surface model.
Table 4.
Regression coefficients of a response surface model.
| Regression Coefficient of Design Variables | MTOW | Wing Span | Wing Root Chord | Wing Loading (W/S) | Power-to-Weight (P/W) | Fuel Efficiency |
|---|
| Intercept | 2562.3 | 33.843 | 5.8205 | 17.0 | 0.0705 | 13.544 |
| Range | 51.260 | 0.3290 | 0.0572 | 0.0 | −0.0002 | 0.2355 |
| Maximum speed | 67.907 | 0.4568 | 0.0786 | 0.0 | 0.0055 | −0.4008 |
| Cruising speed | 101.58 | 0.6595 | 0.1140 | 0.0 | 0.0002 | −0.7820 |
| Cruising altitude | −31.397 | −0.2044 | −0.0352 | 0.0 | −0.0014 | 0.1483 |
| Passengers | 223.24 | 1.4355 | 0.2467 | 0.0 | −0.0026 | −0.7854 |
| Takeoff ground roll | −0.0724 | −0.0005 | −0.0002 | 0.0 | 0.0000 | 0.0001 |
| Stall speed | −104.99 | −2.7368 | −0.4712 | 2.0 | 0.0008 | 0.1836 |
| ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ |
| Passengers × Passengers | 41.641 | 0.2436 | 0.0444 | 0.0 | −0.0005 | −0.0983 |
| Takeoff ground roll × Takeoff ground roll | 1.6614 | 0.0086 | −0.0006 | 0.0 | −0.0005 | 0.0067 |
| Stall speed × Stall speed | 22.2014 | 0.3486 | 0.0594 | 0.0 | −0.0005 | −0.1433 |
Table 5.
Target design variable values 1 for a roadable PAV.
Table 5.
Target design variable values 1 for a roadable PAV.
| Percentage | Predicted Values (lbs) | Target Values (lbs) | Percentage | Predicted Values (ft) | Target Values (ft) |
|---|
| MTOW | 100% | 3219 | 2500 | Wing root chord | 100% | 6.9 | 5.3 |
| 75% | 2734 | 75% | 6.1 |
| 50% | 2608 | 50% | 5.9 |
| 26.7% | 2500 | 25% | 5.6 |
| 25% | 2491 | 2.5% | 5.3 |
| 0% | 2238 | 0% | 5.1 |
Table 6.
Target design variable values 2 for a roadable PAV.
Table 6.
Target design variable values 2 for a roadable PAV.
| Percentage | Predicted Values (ft) | Target Values (ft) | Percentage | | |
|---|
| Wing span | 100% | 40 | ≤40 | Wing loading (W/S) | 100% | 19 | 17 |
| 75% | 36 | 75% | 18 |
| 50% | 34 | 50% | 17 |
| 25% | 33 | 25% | 16 |
| 0% | 29 | 0% | 15 |
Table 7.
Target design variable values 3 for a roadable PAV.
Table 7.
Target design variable values 3 for a roadable PAV.
| Percentage | Predicted Values (hp/lb) | Target Values (hp/lb) | Percentage | Predicted Values (mpg) | Target Values (mpg) |
|---|
| Power-to-weight (P/W) | 100% | 0.089 | ≤0.07 | Fuel efficiency | 100% | 14.84 | maximum |
| 75% | 0.073 | 75% | 13.62 |
| 50% | 0.070 | 50% | 13.09 |
| 25% | 0.068 | 25% | 12.51 |
| 0 | 0.061 | 0% | 9.36 |
Table 8.
Optimized independent design variables.
Table 8.
Optimized independent design variables.
| Independent Design Variables | Optimized Values |
|---|
| Range | 400 (nm) |
| Maximum speed | 100 (kt) |
| Cruising speed | 82 (kt) |
| Cruising altitude | 12,000 (ft) |
| Passengers | 1 (PAX) |
| Takeoff ground roll | 1500 (ft) |
Table 9.
Optimized dependent design variables.
Table 9.
Optimized dependent design variables.
| Dependent Design Variables | Target Value | Optimized Value | Unit |
|---|
| MTOW | 2500 | 2291 | (lb) |
| Wing span | 40 | 33 | (ft) |
| Wing root chord | 5.3 | 5.7 | (ft) |
| Wing loading (W/S) | 17 | 16 | () |
| Power-to-weight (P/W) | 0.07 | 0.06 | (hp/lb) |
| Fuel efficiency | maximum | 14.18 | (mpg) |
Table 10.
Technology impact matrix for identified applicable technologies.
Table 10.
Technology impact matrix for identified applicable technologies.
| K Factor | T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 |
|---|
Flow
Circulation
Flap | Leading Edge Blowing | Nano-Coating | Piezo-Electric Active Skin | Advanced Ducted Fan | Liquid Metal | Advanced Propeller | Advanced Composite Material |
|---|
| Friction drag | −0.15 | −0.1 | −0.1 | −0.05 | 0 | 0 | 0 | 0 |
| Induced drag | 0 | 0 | −0.05 | −0.05 | 0 | 0 | 0 | 0 |
| Aero structure weight | 0.01 | 0.01 | 0 | 0.02 | 0 | 0 | 0 | −0.05 |
| Car system weight | 0 | 0 | 0 | 0 | 0 | −0.1 | 0 | −0.05 |
| Morphing mechanism weight | 0 | 0 | 0 | 0 | 0 | −0.1 | 0 | 0 |
| Propulsion efficiency | 0 | 0 | 0 | 0 | 0.03 | 0 | 0.05 | 0 |
| Lift | 0.1 | 0 | 0 | 0.1 | 0 | 0 | 0 | 0 |
| Electronic weight | 0.05 | 0 | 0 | 0.05 | 0 | 0 | 0 | 0 |
Table 11.
Factorial design for applicable technologies.
Table 11.
Factorial design for applicable technologies.
| Case | T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 |
|---|
| 1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 |
| 2 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | 1 |
| 3 | −1 | −1 | −1 | −1 | −1 | −1 | 1 | −1 |
| 4 | −1 | −1 | −1 | −1 | −1 | −1 | 1 | 1 |
| ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ |
| 130 | 1 | −1 | −1 | −1 | −1 | −1 | −1 | 1 |
| ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ |
| 253 | 1 | 1 | 1 | 1 | 1 | 1 | −1 | −1 |
| 254 | 1 | 1 | 1 | 1 | 1 | 1 | −1 | 1 |
| 255 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | −1 |
| 256 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
Table 12.
Factorial design result for applicable technologies.
Table 12.
Factorial design result for applicable technologies.
| Case | MTOW (lb) | Wing Span (ft) | Wing Root Chord (ft) | | Power-to-Weight (P/W) (hp/lb) | Fuel Efficiency (mpg) |
|---|
| 1 | 2291 | 33.0 | 5.7 | 16 | 0.06 | |
| 2 | 2213 | 32.4 | 5.6 | 16 | 0.06 | 14 |
| 3 | 2247 | 32.7 | 5.6 | 16 | 0.06 | 15 |
| 4 | 2171 | 32.1 | 5.5 | 16 | 0.06 | 15 |
| ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ |
| 130 | 2187 | 32.2 | 5.5 | 16 | 0.06 | 16 |
| ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ | ⦙ |
| 253 | 2110 | 31.7 | 5.4 | 16 | 0.05 | 19 |
| 254 | 2043 | 31.1 | 5.4 | 16 | 0.05 | 19 |
| 255 | 2082 | 31.4 | 5.4 | 16 | 0.05 | 19 |
| 256 | 2016 | 30.9 | 5.3 | 16 | 0.05 | 20 |
Table 13.
Technology combinations satisfying root chord length requirements.
Table 13.
Technology combinations satisfying root chord length requirements.
| Case | Technology Combinations |
|---|
| 48 | Combination 1: T3, T5, T6, T7, T8 |
| 108 | Combination 2: T2, T3, T6, T7, T8 |
| 176 | Combination 3: T1, T3, T5, T6, T7, T8 |
| 22 | Combination 4: T1, T2, T3, T6, T7, T8 |
| 238 | Combination 5: T1, T2, T3, T5, T6, T8 |
| 240 | Combination 6: T1, T2, T3, T5, T6, T7, T8 |
| 248 | Combination 7: T1, T2, T3, T4, T6, T7, T8 |
| 256 | Combination 8: T1, T2, T3, T4, T5, T6, T7, T8 |
Table 14.
Alternative design parameters satisfying all requirements.
Table 14.
Alternative design parameters satisfying all requirements.
| Design Parameters | MTOW (lb) | Wing Span (ft) | Wing Root Chord (ft) | | Power-to-Weight (P/W) (hp/lb) | Fuel Efficiency (mpg) |
|---|
| Target | 2500 | 40 | 5.3 | 17 | 0.07 | Maximization |
| Optimal baseline | 2291 | 33.0 | 5.7 | 16 | 0.06 | 14.18 |
| Combination 1 | 2036 | 31.1 | 5.3 | 16 | 0.06 | 17.44 |
| Combination 2 | 2026 | 31.0 | 5.3 | 16 | 0.05 | 17.81 |
| Combination 3 | 2021 | 31.0 | 5.3 | 16 | 0.05 | 18.51 |
| Combination 4 | 2013 | 30.9 | 5.3 | 16 | 0.05 | 18.91 |
| Combination 5 | 2024 | 31.0 | 5.3 | 16 | 0.05 | 18.59 |
| Combination 6 | 1996 | 30.8 | 5.3 | 16 | 0.05 | 19.39 |
| Combination 7 | 2032 | 31.1 | 5.3 | 16 | 0.05 | 19.57 |
| Combination 8 | 2016 | 30.9 | 5.3 | 16 | 0.05 | 20.05 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}