Efficient Driving Plan and Validation of Aircraft NLG Emergency Extension System via Mixture of Reliability Models and Test Bench



Abstract
1. Introduction
2. Reliability Modeling of NLG EmergencyExtension
2.1. Working Principle of Emergency Extension
2.2. Fault Tree Analysis of Emergency Extension
- 1
- Excessive resistance torque on strut rotation axis (denoted by X1). The aerodynamic force of the landing gear door is too large for the driving mechanism to overcome the passive torque by the active torque of shock absorber strut, so that the landing gear cannot be lowered and locked.
- 2
- Imprecise extension of landing gear (denoted by X2). The landing gear cannot be lowered to a predetermined position owing to the motion accuracy of the mechanism.
- 3
- Unlocked upper-lock. The upper-lock is unlocked (denoted by X3).
- 4
- The lower-lock is not locked (denoted by X4).
- 5
- Static strength failure of landing gear emergency extension (denoted by X5).
2.3. Reliability Method and Mixture of Models
3. Reliability Sensitivity Analysis of Emergence Extension
3.1. Reliability Analysis
3.1.1. Starting Reliability Analysis of Emergency Extension
3.1.2. Reliability Analysisof Emergency Extension Based on Fault Tree
3.2. Sensitivity Analysis
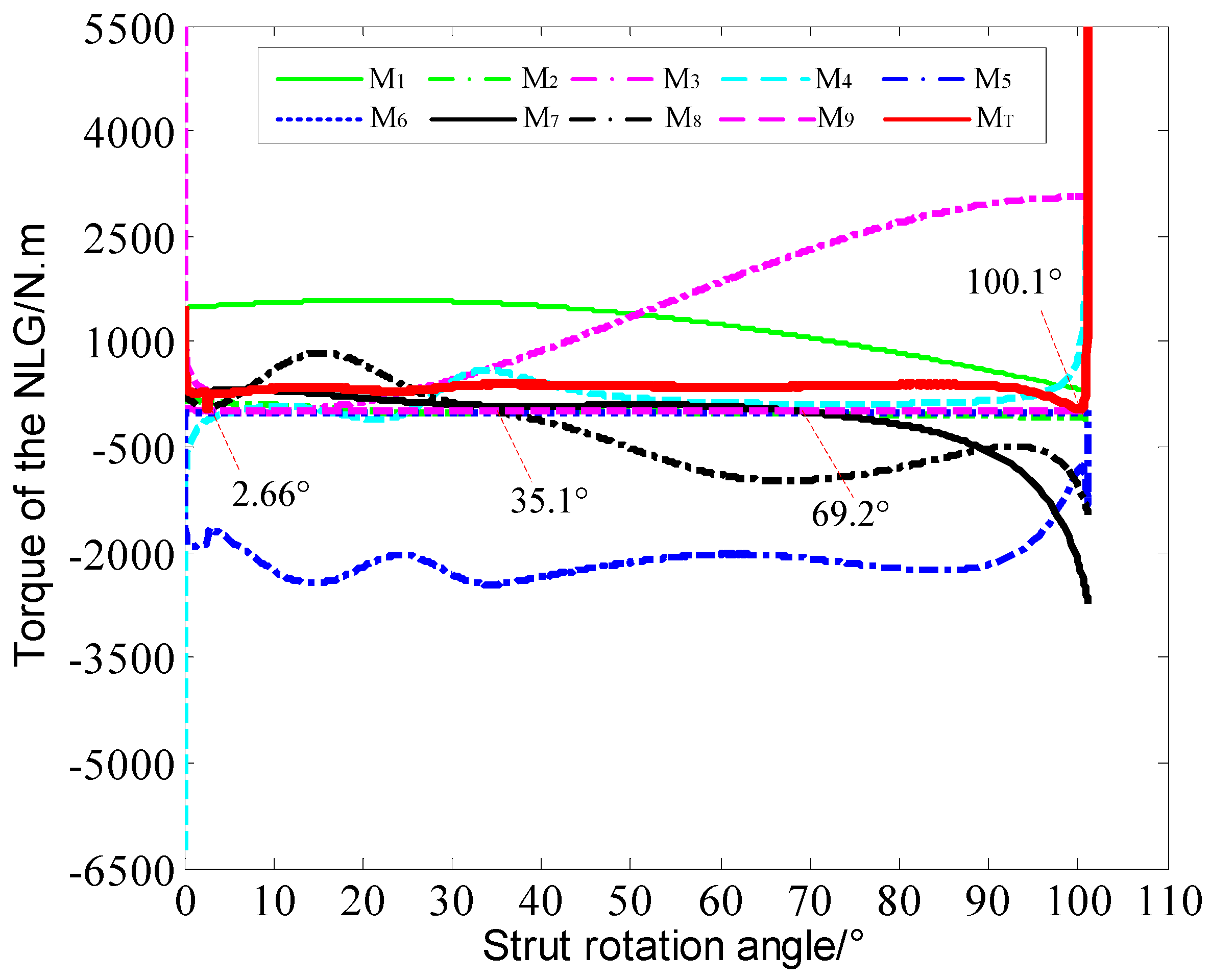
3.2.1. Sensitivity Analysis of Torques
3.2.2. Effect of Main Torque on Failure Probability of Emergency Extension
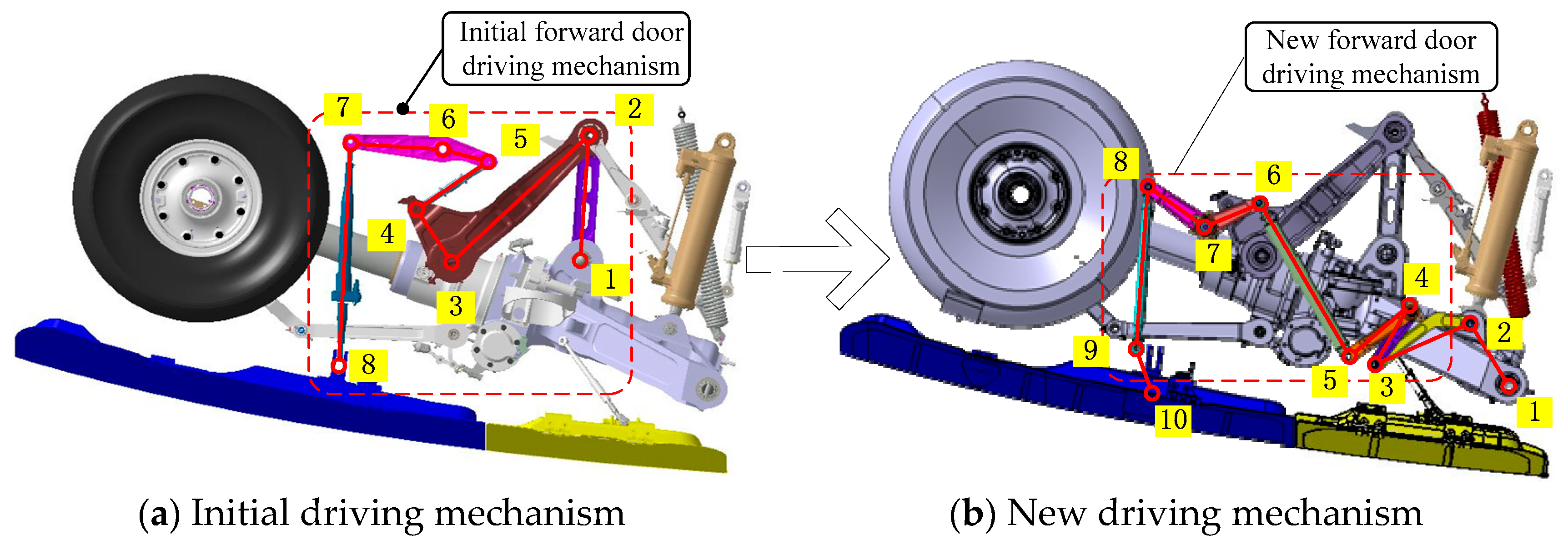
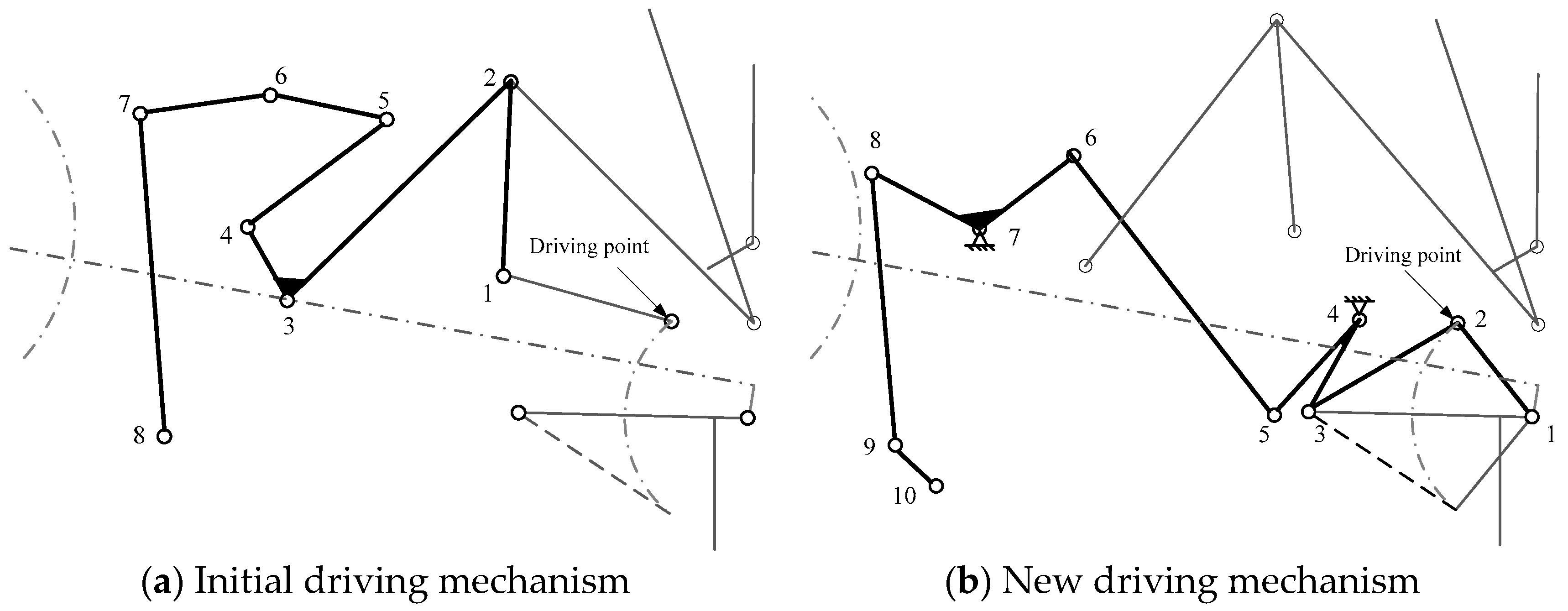
4. Proposal and Validation of New Driving Mechanism Plan
- (1)
- The point of intersection between the main structure and mechanism of NLG keeps invariability.
- (2)
- The main force-transferring path of the forward door structure is unchanged.
- (3)
- The mechanism has strong capacity forresisting forward door load.
5. Conclusions
- 1
- Through the reliability analysis of emergence extension, it is illustrated that the start reliability has the most failure probability in five reliability modes (starting reliability, continuous movement reliability, movement precision reliability, and static strength reliability), indicating that the event X1 (excessive resistance torque on strut rotation axis) seriously influences the reliability of NLG emergence extension.
- 2
- From the sensitivity analysis of NLG emergence extension, the effect levels of nine torques (M1, M2, …, M9, explained in Table 2) on the failure probability of NLG emergence extension are determined, and the sensitivity degrees of the torques M5, M8 and M7 are the top three by the order by sensitivity degree for nine torques. The conclusion is promising guidance for the driving plan design of NLG emergence extension.
- 3
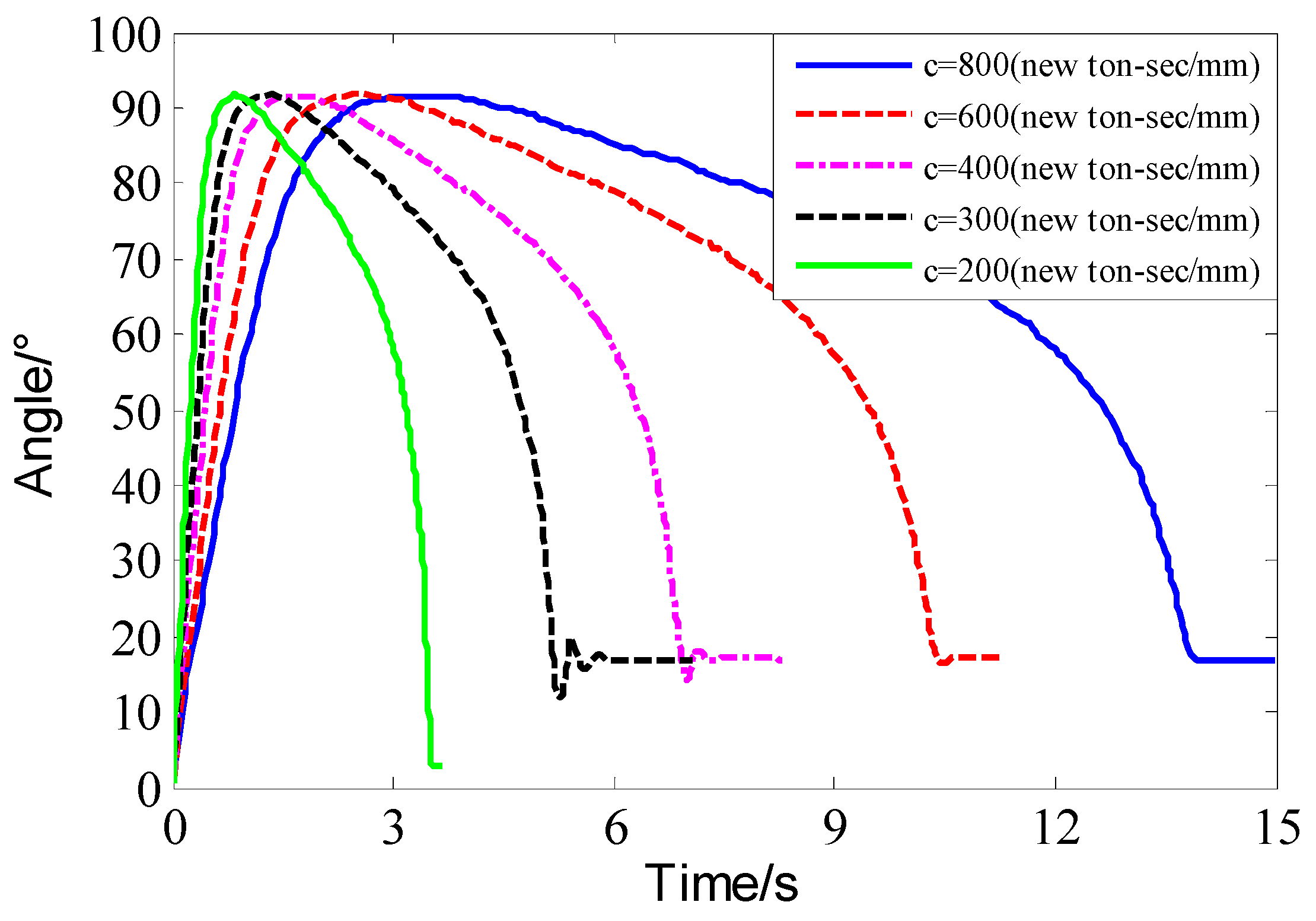
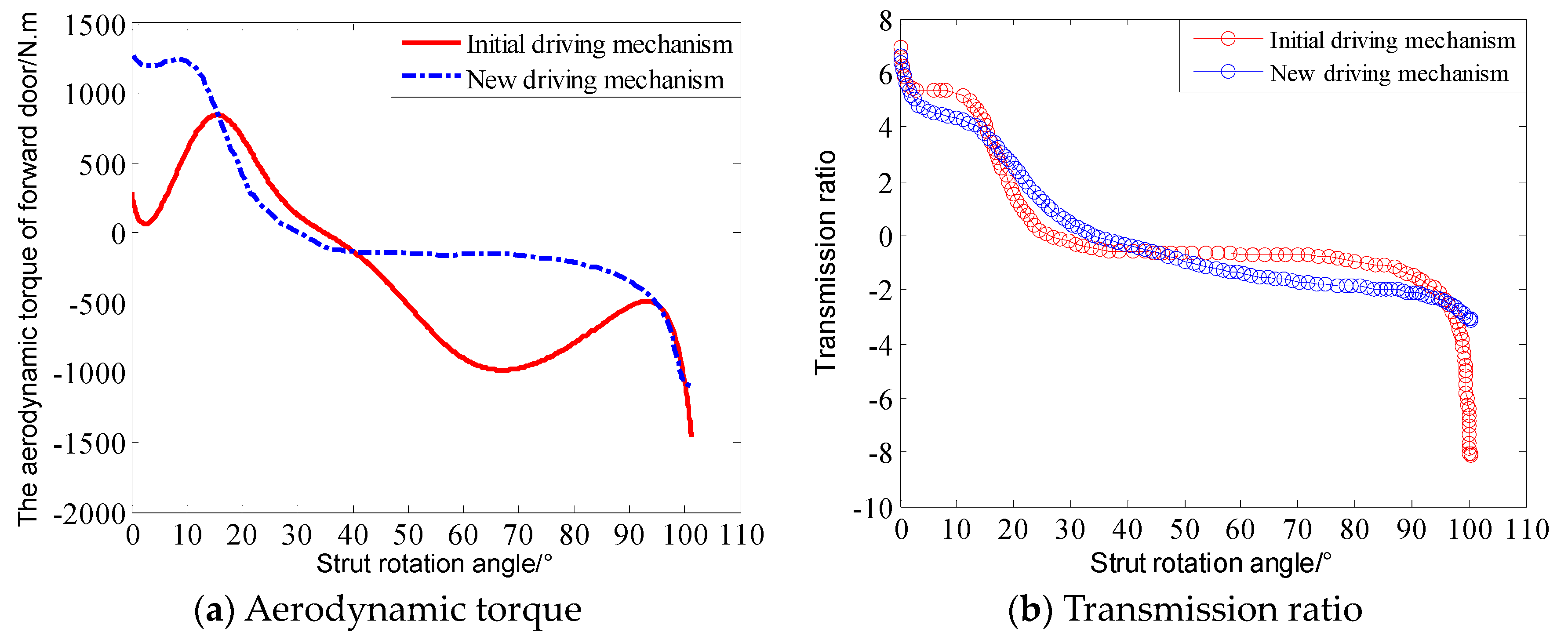
- Two driving plans of NLG emergence extension are designed in this paper. One is to adjust the damping coefficients of the actuating cylinder, and the other is to the aerodynamics of forward door. Through the comparison and validation of the two plans, the second driving plan is acceptable, because this plan can reduce the adverse torque of emergence extension by about 24.8%, increase the transmission ratio of the driving mechanism, and address the emergence extension fault problem and reliably realize the emergence extension of aircraft NLG besides the normal extension system. The proposed new driving mechanism is illustrated to be a promising feasible driving plan with high reliability. The developed driving mechanism is promising in the application of civil and military aircrafts, which supports the safety and airworthiness in flight.
Author Contributions
Funding
Conflicts of Interest
References
- Krüger, W.R.; Morandini, M. Recent developments at the number simulation of landing gear dynamics. CEAS. Aeronaut. J. 2011, 1, 55–68. [Google Scholar] [CrossRef]
- Infante, V.; Fernandes, L.; Freitas, M.; Baptista, R. Failure analysis of a nose landing gear fork. Eng. Fail. Anal. 2017, 82, 554–565. [Google Scholar] [CrossRef]
- Platz, R.; Gotz, B.; Melz, T. Approach to evaluate and to compare basic structural design concepts of landing gears in early stage of development under uncertainty. Model. Validation. Uncertain. Quan. 2016, 3, 167–175. [Google Scholar]
- Thoai, N.; Alexandra, S.; Paul, E. Method for analyzing nose landing gear during landing using structural finite element analysis. J. Aircraft. 2012, 49, 275–280. [Google Scholar]
- FAR-25. Federal Aviation Regulations Part 25: Transport Category Airplanes; Federal Aviation Administration: Washington, DC, USA, 2011. [Google Scholar]
- CCAR-25-R4. China Civil Aviation Regulations Part 25: Transport Aircraft Airworthiness Standards; Civil Aviation Administration of China: Peking, China, 2011. [Google Scholar]
- Civil Aviation Safety. World Civil Aviation Accident date-base [EB/OL]. Available online: http//www.air-safety.net (accessed on 10 August 2019).
- Flight Safety Foundation. Aviation Safe Network [EB/OL]. Available online: aviation-safety.net (accessed on 10 August 2019).
- Rahmani, M.; Behdinan, K. On the effectiveness of shimmy dampers in stabilizing nose landing gears. Aerosp. Sci. Technol. 2019, 91, 272–286. [Google Scholar] [CrossRef]
- Knowles, J.; Krauskopf, B.; Lowenberg, M. Numerical continuation analysis of a three-dimensional aircraft main landing gear mechanism. Nonlinear Dyn. 2013, 71, 331–352. [Google Scholar] [CrossRef][Green Version]
- Rankin, J.; Krauskopf, B.; Lowenberg, M.; Coetzee, E. Operational parameter study of aircraft dynamics on the ground. J. Comput. Nonlinear Dyn. 2010, 5, 021007. [Google Scholar] [CrossRef]
- Chang, Q.C.; Xue, C.J. Reliability analysis and experimental verification of landing gear steering mechanism considering environmental temperature. J. Aircraft. 2018, 53, 1154–1164. [Google Scholar] [CrossRef]
- Choi, S.; Kwon, H.B.; Chung, S.J.; Jung, C.R.; Sung, D.Y. An operational analysis and dynamic behavior for a landing gear system using ADAMS. J. Korean. Soc. Aeronaut. Space Sci. 2003, 31, 110–117. [Google Scholar]
- Yin, Y.; Nie, H.; Wei, X.H.; Chen, H.; Zhang, M. Fault analysis and solution of an airplane nose landing gear’s emergency lowering. J. Aircraft. 2016, 53, 1022–1032. [Google Scholar] [CrossRef]
- Yin, Y.; Hong, N.; Huajin, N.; Ming, Z. Reliability analysis of landing gear retraction system influenced by multifactors. J. Aircraft. 2016, 55, 713–724. [Google Scholar] [CrossRef]
- McClain, J.G.; Vogel, M.; Pryor, D.R.; Heyns, H.E. The United States Air Force’s landing gear systems center of excellence—A unique capability. In Proceedings of the 2007 US Air Force T&E Days, Destin, FL, USA, 13–15 February 2007. [Google Scholar]
- Öström, J.; Lähteenmäki, J.; Viitanen, T. F18 hornet landing simulations using ADAMS and Simulink co-Simulation. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; pp. 2008–6850. [Google Scholar]
- Lin, Q.; Nie, H.; Ren, J.; Chen, J.B. Investigation on design and reliability analysis of a new deployable and lockable mechanism. Acta Astronaut. 2012, 73, 183–192. [Google Scholar] [CrossRef]
- Zhang, H.; Ning, J.; Schmelzer, O. Integrated landing gear system retraction/extension analysis using ADAMS. In Proceedings of the 2000 International ADAMS User Conference, Orlando, FL, USA, 19–21 June 2000. [Google Scholar]
- Chen, J.; Ma, C.B.; Song, D. Multiple failure prognosis of landing gear retraction/extension system based on H filtering. P. I. Mech. Eng. G J. Aer. 2015, 229, 1543–1555. [Google Scholar] [CrossRef]
- Ting, K.L.; Zhu, J.M.; Watkins, D. The effects of joint clearance on position and orientation deviation of linkages and manipulator. Mech. Mach. Theory. 2000, 35, 391–401. [Google Scholar] [CrossRef]
- Jhuang, C.S.; Kao, Y.Y.; Chen, D.Z. Design of one DOF closed-loop statically balanced planar linkage with link-collinear spring arrangement. Mech. Mach. Theory. 2018, 130, 301–312. [Google Scholar] [CrossRef]
- Song, L.K.; Fei, C.W.; Bai, G.C.; Yu, L.C. Dynamic neural network method-based improved PSO and BR algorithms for transient probabilistic analysis of flexible mechanism. Adv. Eng. Inform. 2017, 33, 144–153. [Google Scholar] [CrossRef]
- Lu, C.; Feng, Y.W.; Liem, R.P.; Fei, C.W. Improved kriging with extremum response surface method for structural dynamic reliability and sensitivity analyses. Aerospace Sci. Technol. 2018, 76, 164–175. [Google Scholar] [CrossRef]
- Zhang, C.Y.; Wei, J.S.; Jing, H.Z.; Fei, C.W. Reliability analysis of blisk low fatigue life with generalized regression extreme neural network method. Materials 2019, 12, 1545. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.; Feng, Y.W.; Fei, C.W.; Feng, X.X.; Choy, Y.S. Weighted regression-based extremum response surface method for structural dynamic fuzzy reliability analysis. Energies. 2019, 12, 1588. [Google Scholar] [CrossRef]
- Liu, J.Y.; Song, B.F.; Zhang, Y.G. Competing failure model for mechanical system with multiple functional failures. Adv. Mech. Eng. 2018, 10, 1–16. [Google Scholar] [CrossRef]
- Zhang, J.W.; He, S.H.; Wang, D.H.; Liu, Y.P.; Yao, W.B.; Liu, X.B. A new reliability analysis model of the chegongzhuang heat-supplying tunnel structure considering the coupling of pipeline thrust and thermal effect. Materials 2018, 12, 236. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.G.; Ono, T. A general procedure for first/second-order reliability method. Str. Saf. 1999, 21, 95–112. [Google Scholar] [CrossRef]
- He, X.; Oyadiji, O. Application of coefficient of variation in reliability-based mechanical design and manufacture. J. Mater. Process. Technol. 2001, 119, 374–378. [Google Scholar] [CrossRef]
- Michaael, D.; Desmond, F.; Ktrang, N. Assessment of the reliability of calculations of the coefficient of variation for normal and polymegethous human corneal endothelium. Optometry. Vision. Sci. 1993, 70, 759–770. [Google Scholar]
- He, X.F.; Zhai, B.; Dong, Y.M.; Liu, W.T. Safe-life analysis accounting for the loading spectra variability. Eng. Fail. Anal. 2010, 17, 1213–1220. [Google Scholar] [CrossRef]
- Zhang, J.H. Guidelines for Structural Strength Reliability Design of Missiles and Launch Vehicles (Metal Structural Part); China Astronautic publishing house: Beijing, China, 1994. [Google Scholar]
- Yao, M.Y.; Qin, D.T.; Zhou, X.Y.; Zhan, S.; Zeng, Y.P. Integrated optimal control of transmission ratio and power split ratio for a CVT-based plug-in hybrid electric vehicle. Mech. Mach. Theory 2019, 136, 52–71. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| M1 | Torque on strut rotation axis produced by the gravity of NLG |
| M2 | Torque on strut rotation axis produced by the gravity of door |
| M3 | Torque on strut rotation axis produced by the aerodynamic force of strut and wheel |
| M4 | Torque on strut rotation axis produced by the spring force of locking mechanism |
| M5 | Torque on strut rotation axis produced by damping force |
| M6 | Torque on strut rotation axis produced by friction |
| M7 | Torque on strut rotation axis produced by after-door aerodynamic force |
| M8 | Torque on strut rotation axis produced by forward-door aerodynamic force |
| M9 | Torque on strut rotation axis produced by the unlocking force of upper-lock |
| MT | Total torque |
| No. | Bottom Events | Reliability Models | Safe Boundary Equation | Reliability Index | Distribution |
|---|---|---|---|---|---|
| 1 | Excess passive torque X1 | Starting reliability M | Normal | ||
| Continuous movement reliability Mω | Normal | ||||
| 2 | Imprecise lowing X2 | Movement precisionReliability θ0 | Normal | ||
| 3 | Unlocked upper-lock X3 | ||||
| 4 | Failed locked lower-lock X4 | ||||
| 5 | Static strength failure X5 | Static strengthreliability | Normal |
| Torques | M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 | M9 |
|---|---|---|---|---|---|---|---|---|---|
| Variable coefficient Ci | 0.03 | 0.03 | 0.08 | 0.03 | 0.03 | 0.03 | 0.08 | 0.08 | 0.03 |
| Failure Probability | Flight Speed | |||
|---|---|---|---|---|
| 270 Kts | 250 Kts | 220 Kts | 180 Kts | |
| PX1 | 1.2728 × 10−5 | 2.2401 × 10−5 | 4.0683 × 10−5 | 6.1819 × 10−5 |
| PX2 | 5.7905 × 10−8 | |||
| PX3 | 5.7026 × 10−8 | |||
| PX4 | 5.7026 × 10−8 | |||
| PX5 | 4.2655 × 10−6 | |||
| PT1 | 1.7165 × 10−5 | 2.6838 × 10−5 | 4.5120 × 10−5 | 6.6256 × 10−5 |
| Driving Mechanisms | Flight Speed /Kts | Lowering Time of NLG/s | |
|---|---|---|---|
| Emergency Extension | Normal Extension | ||
| Initial driving mechanism | 270 | Failed lowering and lock | 10.69 |
| 250 | Failed lowering and lock | 10.81 | |
| 220 | Failed lowering and lock | 11.02 | |
| 180 | Failed lowering and lock | 11.38 | |
| New driving mechanism | 270 | 14.66 | 11.09 |
| 250 | 15.24 | 11.25 | |
| 220 | 15.95 | 11.28 | |
| 180 | 17.17 | 11.61 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Feng, Y.; Lu, C.; Fei, C. Efficient Driving Plan and Validation of Aircraft NLG Emergency Extension System via Mixture of Reliability Models and Test Bench. Appl. Sci. 2019, 9, 3578. https://doi.org/10.3390/app9173578
Zhu Z, Feng Y, Lu C, Fei C. Efficient Driving Plan and Validation of Aircraft NLG Emergency Extension System via Mixture of Reliability Models and Test Bench. Applied Sciences. 2019; 9(17):3578. https://doi.org/10.3390/app9173578
Chicago/Turabian StyleZhu, Zhengzheng, Yunwen Feng, Cheng Lu, and Chengwei Fei. 2019. "Efficient Driving Plan and Validation of Aircraft NLG Emergency Extension System via Mixture of Reliability Models and Test Bench" Applied Sciences 9, no. 17: 3578. https://doi.org/10.3390/app9173578
APA StyleZhu, Z., Feng, Y., Lu, C., & Fei, C. (2019). Efficient Driving Plan and Validation of Aircraft NLG Emergency Extension System via Mixture of Reliability Models and Test Bench. Applied Sciences, 9(17), 3578. https://doi.org/10.3390/app9173578