1. Introduction
Owing to the excellent spanning capacity and graceful appearance, more and more suspension bridges have been constructed/designed in recent years, serving as critical links in transportation networks, in order to cross larger water bodies, straits, or canyons. As the crucial force transmission components in suspension bridges, the suspenders are designed to transmit the roadway weight and the forces from the operational loads mainly from the vehicular traffic and wind to the primary force members. As a result, suspenders are inevitably subjected to continuously repeated stress cycles induced by operational loads during their lifetime. Thus, significant fatigue damage could accumulate at the suspenders, deteriorating the service performance of suspenders, which makes the suspenders among the most vulnerable bridge parts. Several prevention strategies have been proposed to protect the suspenders from deterioration, e.g., implementing energy absorbing devices at the bridge bearings or at the suspenders, the use of anti-corrosion materials, performing regular maintenance, etc. [
1,
2,
3,
4,
5]. Nevertheless, there have been numerous reports worldwide regarding the premature damage of cables and suspenders due to fatigue, corrosion, or their coupled effects only after a few years of operation, resulting in traffic interruption, maintenance costs, or even total structural failure [
6,
7,
8]. For a suspension bridge, the design life is 100 years or more, whereas the design life of a suspender is usually much less in mainland China [
9]. Nevertheless, the fatigue life of different suspenders could vary dramatically, attributing to many factors such as the changing environments, the length and arrangement of suspenders, etc. Accurate assessment of the fatigue life of suspenders is not only critical to secure the serviceability and functionality of bridges, but also important to provide guidance for decision-making regarding the maintenance and replacement of the suspenders.
In recognizing the importance of the integrity of suspenders, many researchers throughout the world have proposed various approaches to investigating the deterioration mechanism of the suspenders, which can be mainly categorized into three groups, as follows: Experimental approaches [
7,
10], numerical approaches [
11,
12], and the combination of the former two approaches [
9]. Recently, owing to the advanced structural health monitoring technology, there is an increasing trend in utilizing the in-situ measurement data for the fatigue assessment of suspenders [
13], which further improves the credibility and accuracy.
Although extensive research has been conducted to reveal the deterioration mechanism of suspenders, a few challenges still remain unresolved regarding the accurate performance evaluation of suspenders. One major challenge is that the fatigue damage accumulation is a stochastic process subjected to various aleatory (random) and epistemic (lack of knowledge) uncertainties associated with material properties, operational loads, prediction modes, etc. For instance, laboratory tests on a group of degraded cables indicated that the Young’s modulus and ultimate strain follow the normal distributions, while the yield and ultimate stresses follow the Weibull distribution [
9]. A numerical study conducted by Liu et al. [
14] showed that the stochastic traffic load and wind load pose significant effects on the fatigue life of the suspenders. Compared with deterministic approaches, a probabilistic-based approach is a good alternative to tackle the uncertainties. Recently, Liu et al. [
12] proposed a probabilistic numerical procedure for performing fatigue analysis on short suspenders under stochastic vehicular load. Similarly, Deng et al. [
15] also presented a probabilistic fatigue assessment approach for suspenders based on structural monitoring, where the stochastic traffic was simulated using the Monte Carlo method. It should be noted that the above analyses have one major limitation, i.e., the vehicles were simplified as vertical load and only one vehicle was considered during the analysis. Even if the traffic flow is considered, critical parameters in the traffic flow, e.g., the vehicle type, vehicle speed, gross vehicle weight, and vehicle lane occupancy ratio, were not or only partially considered. Such simplification ignores the coupling effects between the traffic flow and the bridge, which may have significant influence on the dynamic behavior of the suspender and the resultant fatigue performance [
16]. Additionally, there has been limited literature specifically focused on the effects of wind loads and the fatigue performance of the suspender considering site-specific wind load and traffic load has not been quantitatively evaluated.
In the present study, a probabilistic fatigue framework is proposed to evaluate the fatigue performance of the suspenders under stochastic wind and traffic loads, through the integration of in-situ monitoring data and the linear fatigue damage rule. First, the fully coupled traffic-bridge-wind (TBW) simulation is introduced. Subsequently, the stochastic wind and traffic load conditions at the bridge site are introduced, in which the associated key parameters are presented in detail. Furthermore, a probabilistic numerical framework is established to predict the time-dependent fatigue reliability of the suspenders based on the linear fatigue damage rule. As a demonstration, the proposed numerical framework is applied to a long-span suspension bridge located in a mountainous canyon. The stress response characteristics of both the long suspender and the short suspender under individual wind load, individual traffic load, as well as combined wind and traffic loads are investigated thoroughly. Finally, the fatigue life of the suspenders is estimated using Monte-Carlo simulations.
5. Numerical Simulation
A long-span suspension bridge over a deep gorge, as shown in
Figure 6, in the Hunan Province of China [
34] was adopted in the present study to evaluate the fatigue reliability of the suspenders. The suspension bridge has a span arrangement of 242 m + 1176 m + 116 m. The truss girder is 27 m wide and 7.5 m high. A three-dimensional (3D) finite element model was set up on the ANSYS platform to simulate the suspension bridge, in which the steel truss girder and concrete pylon were idealized as the 3D-beam element, BEAM4, and the cables and suspenders are simplified as a 3D-link element, LINK10. The stiffness contributions due to the pavement and railing were neglected and their masses were equally distributed to the steel truss girder using the mass-only element MASS21. The bearings implemented at both ends of bridge girder were modeled by swing rigid links and horizontal rigid links to restrict the vertical and horizontal movement, while the viscous fluid dampers installed at both ends of the bridge girder, to mitigate the longitudinal movement, were simulated with the control element COMBIN37. Additionally, the main cables and pylons are fixed at the bases.
There is a total of 71 pairs of suspenders distributed along the longitudinal axis of the bridge. Among which, 3 pairs are anchored on the ground directly, (denoted as ground suspenders hereafter) with an equal distance of 29 m, and the other 68 pairs are anchored on the steel truss girder (denoted as girder suspenders hereafter) with an equal distance of 14.5 m. As shown in
Figure 6, the 71 pairs of suspenders are labeled as S
i (
i = 1,2, …, 71), in which S1, S70, and S71 denote the ground suspenders and S2 to S69 denote the girder suspenders. Since the suspension bridge is symmetric about the longitudinal axis, for each pair of suspenders, the suspender at the windward side has a pretty similar fatigue performance as that of the suspender at the leeward side. Additionally, the preliminary analysis reveals that the suspenders S1, S2, S19, and S36 can be used to represent all the suspenders under various loading scenarios. Therefore, the suspenders S1 (ground suspender), S2 (suspender at the girder end), S19 (suspender at 1/4 span), and S36 (suspender at mid-span) at the windward side were selected for the subsequent analysis.
For each suspender, the upper end directly crosses the main cable, while the lower end is attached with a pin connection to the anchorage plate on the upper chord of the truss girder. Steel wire ropes with an elasticity modulus of 1.15 × 10
5 MPa are adopted for all the suspenders. Two types of cross sections are adopted for the suspenders, as follows: (1) A cross section with a diameter of 88 mm was used for suspenders S1, S2, S36, S69–S71 and (2) a cross section with a diameter of 62 mm was used for the rest suspenders. As illustrated in
Figure 7, the steel wire rope in the suspender consists of eight outer strands and eight middle strands laid helically and symmetrically in two layers around a straight core strand, and the core strand itself is made of several wires regularly arranged around a central wire.
5.1. Stress Ranges of Suspenders Resulting from Individual Wind Load
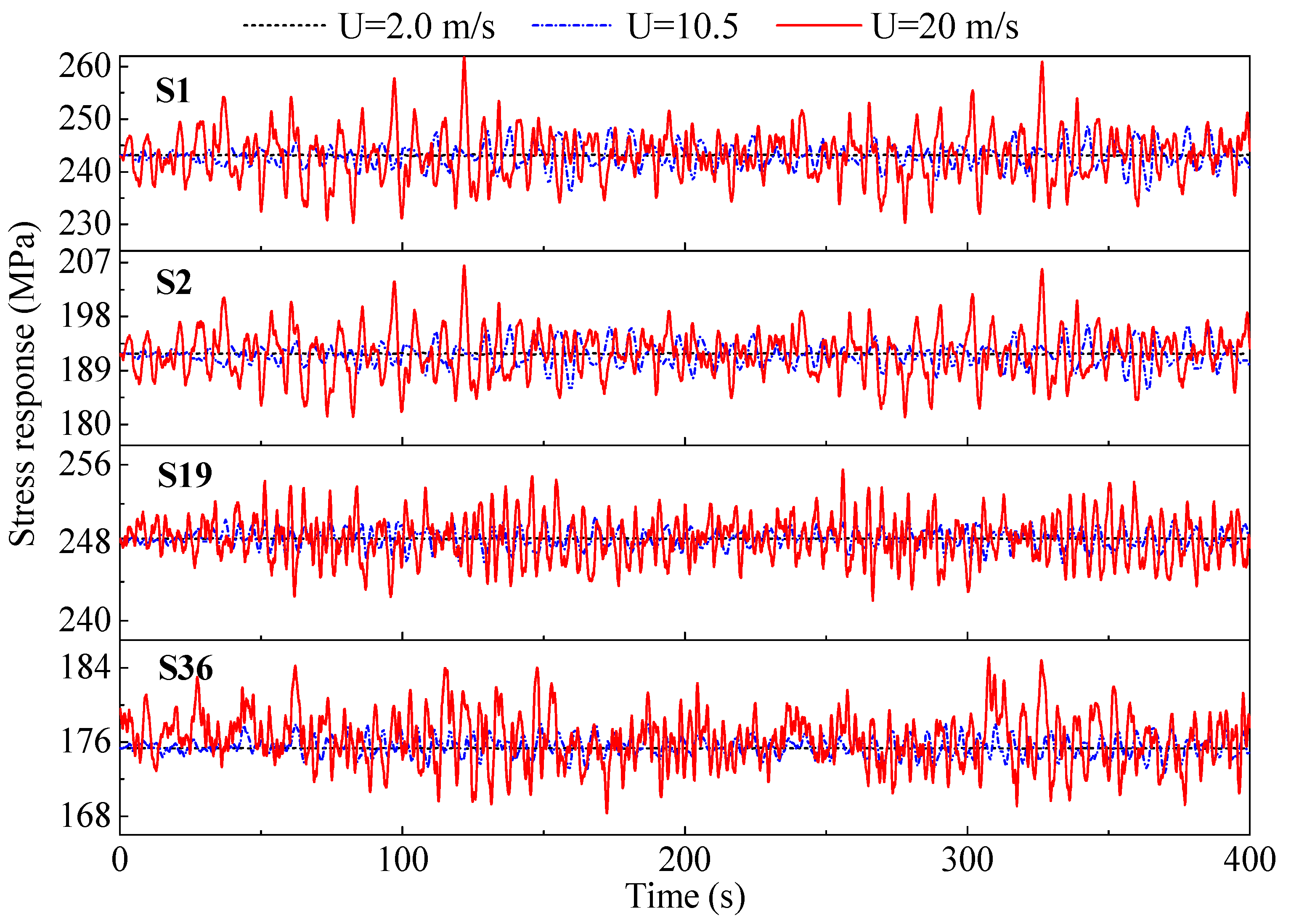
Considering the main focus of the present study is to predict the fatigue life of the suspenders, only the stress responses of the suspenders are presented and the discussion on dynamic responses of the bridge structure are not included herein. In this section, the stress responses of the representative suspenders resulting from individual wind load were first investigated, as shown in
Figure 8. For better illustration, the stress responses for a duration of 400 s under the wind speeds of 2.0 m/s, 10.5 m/s, and 20 m/s are presented. For all the four representative suspenders, the variation of stress responses under lower wind speeds is much lower than that under higher wind speeds. Taking the suspender S1 as an example, the standard deviations of the stress responses under wind speeds of 2.0 m/s, 10.5 m/s, and 20 m/s were 0.07 MPa, 2.10 MPa, and 4.45 MPa, respectively. It is obvious that as the wind speed increases, the variation of the induced stress responses increases remarkably. Since the variation of the stress response relates to the stress range that directly determines the fatigue life, high winds are expected to be much more destructive in terms of fatigue reliability than the low winds.
As the prerequisite for estimating the fatigue life, the stress range values and number of cycles of all four representative suspenders were obtained through the rain-flow counting method, as listed in
Table 6. It is worth noting that the stress range cutoff levels have a strong effect on the number of cycles. In the present study, 3.45 MPa was chosen as the cutoff level for stress range to calculate the number of cycles, as the contribution of stress ranges less than 3.45 MPa can be neglected [
35]. The results in
Table 6 show that both the stress ranges and the number of stress cycles for all the selected suspenders under wind speed of 2.0 m/s were equal to 0, indicating that the contribution of
U = 2.0 m/s to the fatigue damage of suspenders can be neglected. In addition, both the stress range and the number of cycles increase quickly with the increase of wind speed in general, showing that high wind speeds could cause much more significant fatigue damage to the suspenders than low wind speeds. This finding is consistent with the finding drawn from
Figure 8.
5.2. Stress Ranges of Suspenders Resulting from Individual Traffic Load
Figure 9 displays the stress responses of the representative suspenders under both free-flow traffic and busy-flow traffic. It may be observed from
Figure 9 that the stress level of the stress response for all four representative suspenders under free-flow traffic was at the same level as that under busy-flow traffic. However, the variation frequency of the stress response for all four representative suspenders under free-flow traffic was lower than that under busy-flow traffic, especially for short suspenders S19 and S36. This is due to the fact that the traffic volume of the busy-flow is more than 3 times that of the free-flow. With more vehicles in busy-flow passing by, the suspenders are expected to experience more truck passages, resulting in more rapid stress response variations. In addition, the short suspenders are believed to be more sensitive to the traffic loads than the long suspenders, because the influence of both the vertical and horizontal displacement at the anchor positions of short suspenders on their resultant stress responses are more appreciable. This can also explain why the stress response of short suspenders S19 and S36 under free-flow traffic displayed a distinctive pattern from that under busy-flow traffic.
The stress range values and number of cycles of all four representative suspenders under both free-flow and busy-flow traffic could be calculated based on the corresponding stress responses through the rain-flow counting method, as tabulated in
Table 7. As shown in
Table 7, the stress ranges for all selected suspenders under both types of traffic flow were very close (differences within 1.49%), while the number of cycles under busy-flow were remarkably larger than those under free-flow (increments range from 58.82% to 104.76%). This finding is also consistent with the finding observed from
Figure 9. Furthermore, by comparing the results shown in
Table 6 and
Table 7, the stress range, as well the number of cycles under wind speed larger than 13.5 m/s, is comparable to those under traffic load, indicating that both wind and traffic play significant roles in predicting the fatigue life of suspenders.
5.3. Stress Ranges of Suspenders Resulting from Combined Wind and Traffic Loads
In this section, the stress ranges of suspenders under combined wind and traffic loads are investigated. The aforementioned discussions show that the stress responses of long suspenders, i.e., S1 and S2 were similar, while the stress response of short suspenders, i.e., S19 and S36, were similar. Therefore, the stress responses of long suspender S1 and short suspender S36 under combined wind and traffic loads are presented for demonstration purpose, as shown in
Figure 10. It is shown in
Figure 10a,b that, for both suspenders S1 and S36, the traffic load generally controls the mean trend of the stress response, while the wind load generally contributes to the fluctuation of the stress response. Consequently, as the wind speed increases, the fluctuation of the stress response increases remarkably. Therefore, it is clearly shown in
Figure 10 that the stress responses of the suspenders under combined wind and traffic loads were larger than those under either individual wind load or individual traffic load. Considering that both the wind and traffic loads exist on the bridge during its life time, it is of paramount importance to account for both wind and traffic loads for the fatigue reliability analysis of suspenders.
Table 8 lists the stress ranges and number of stress cycles of four representative suspenders due to combined wind and traffic loads in one day. Based on the results in
Table 8, the effective stress range (
) and the average daily number of cycles (
) were then computed using Equations (13) and (14), as tabulated in
Table 9. The
and
were further used to predict the fatigue life of the suspenders, as discussed in the subsequent section.
5.4. Fatigue Life Predictions
The predicted effective stress range and average daily number of cycles provides a reasonability basis for the fatigue reliability evaluation of the suspenders. In addition, the other random variables and constants that contribute to the fatigue damage are listed in
Table 5. With the limit-state function shown in Equation (16) and the statistics of the random variables displayed in
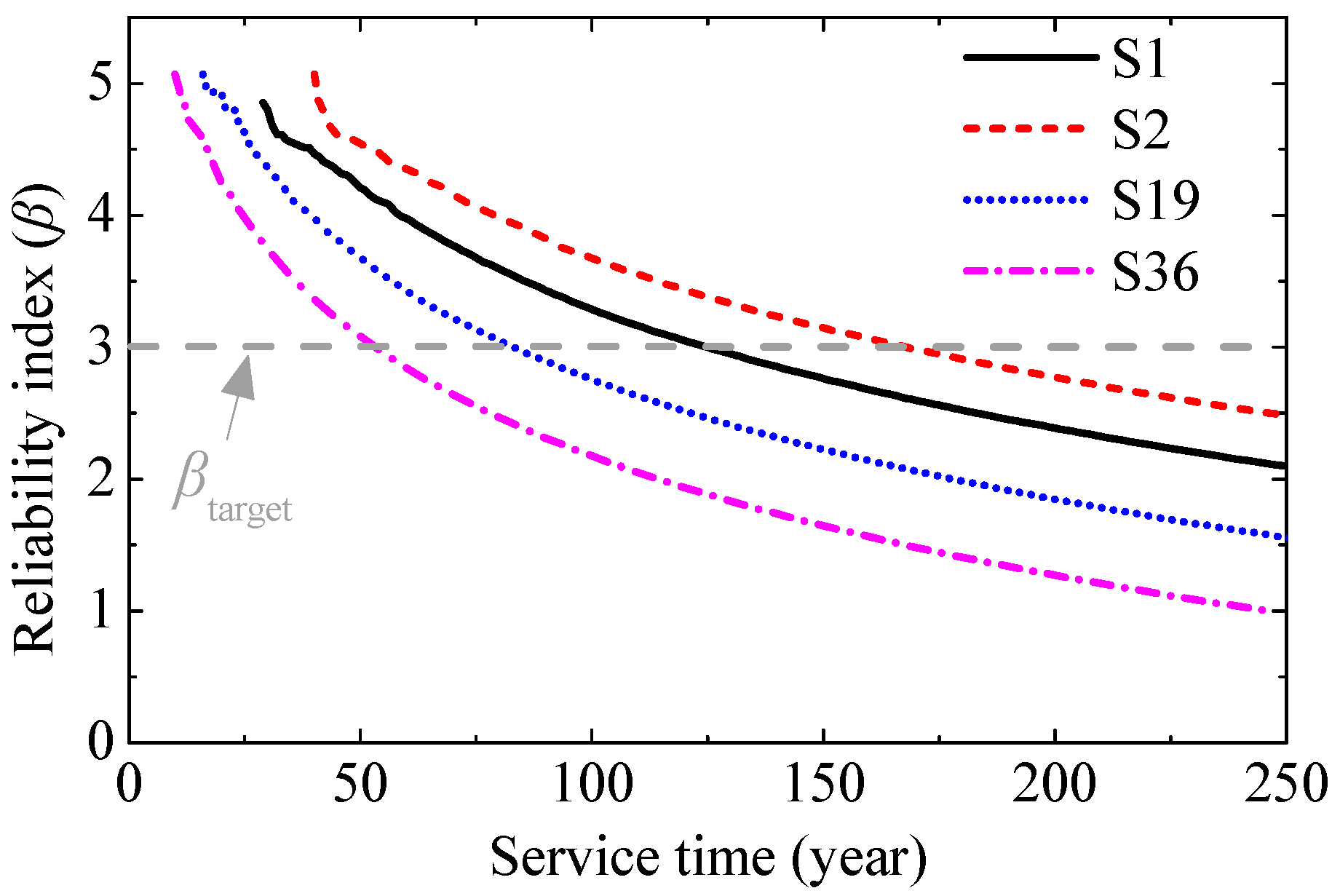
Table 6, the fatigue reliability index of each suspender of interest could be computed using Monte-Carlo simulations, as shown in
Figure 11. It was observed that, among four suspenders under investigation, the short suspender S36 (mid-span suspender) and the long suspender S2 (girder end suspender) were, respectively, the most and the least prone to fatigue damage. If the service life of the suspender is designed as 100 years, the corresponding reliability indices for suspenders S1, S2, S19, and S36 are reduced to 3.28, 3.68, 2.76, and 2.18, respectively.
Furthermore, the fatigue life can be estimated provided with a target reliability (βtarget). Since, currently, no consensus has been reached in the literature regarding the target reliability for the suspenders, the value of 3.0 was adopted in the present study, which corresponds to a failure probability of 0.135%. As a result, the fatigue life of the representative suspenders S1, S2, S19, and S36 under βtarget was calculated as 124 years, 167 years, 83 years, and 53 years, respectively.
6. Conclusions
In the present study, the time-dependent fatigue reliability of the suspenders considering life time stochastic wind and traffic loads was evaluated based on fully coupled traffic-bridge-wind (TBW) analysis. In order to accurately predict the fatigue reliability of the suspenders, the in-situ monitoring data containing the essential wind and traffic information were analyzed thoroughly first and then subsequently implemented into the stochastic wind and traffic model. Finally, the linear fatigue damage rule was adopted to estimate the fatigue life of the suspenders. The following conclusions could be drawn:
- (1)
If only the wind load is considered, the results indicate that high wind speeds could cause much more significant fatigue damage on the suspenders than low wind speeds.
- (2)
If only the traffic load is considered, it was found that the stress level of the stress response of the suspenders under free-flow traffic is at the same level as that under busy-flow traffic. However, the variation frequency of the stress response of suspenders is lower than that under busy-flow traffic, especially for short suspenders S19 and S36.
- (3)
Considering both wind and traffic loads, it was indicated by the stress responses of the suspenders that both wind and traffic play significant roles in predicting the fatigue life of suspenders.
- (4)
The short suspender S36 (mid-span suspender) and the long suspender S2 (girder end suspender) were, respectively, the suspenders most and the least prone to fatigue damage. In addition, provided with a target reliability index of 3.0 and considering the lifetime wind and traffic load, the fatigue life of suspenders S36 and S2 was estimated at 53 years and 167 years, respectively.
In the present study, only the portion of the suspender away from the structural connections, e.g., anchor zone, was investigated. The portion of the suspender near or located at the structural connections is subjected to very complex stress status including tension, bending, or even shear and torsion. Under such complex stress status, a more sophisticated methodology, e.g., fracture mechanics probably combined with very refined finite element modeling, may be required to evaluate the fatigue damage and predict the fatigue life of the suspender, which is currently under investigation by the authors.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}