A Neural Network Based Landing Method for an Unmanned Aerial Vehicle with Soft Landing Gears


Abstract

1. Introduction
- The design of a novel elastomer landing gear is achieved. It guarantees safe landing on a convex surface with diameter smaller than the quadrotor body length through a conventional vertical landing strategy.
- A neural network-based backstepping technique is adopted to meet the desired vertical landing requirement, and soft landing is achieved using the proposed controller with near-zero landing speed. The stability of the landing control system is proved through the Lyapunov approach and the backstepping technique.
- The proposed platform is challenged in a real flight outdoor scene, which validates the controller’s effectiveness and robustness.
2. Quadrotor Modeling and Landing Gear Architecture
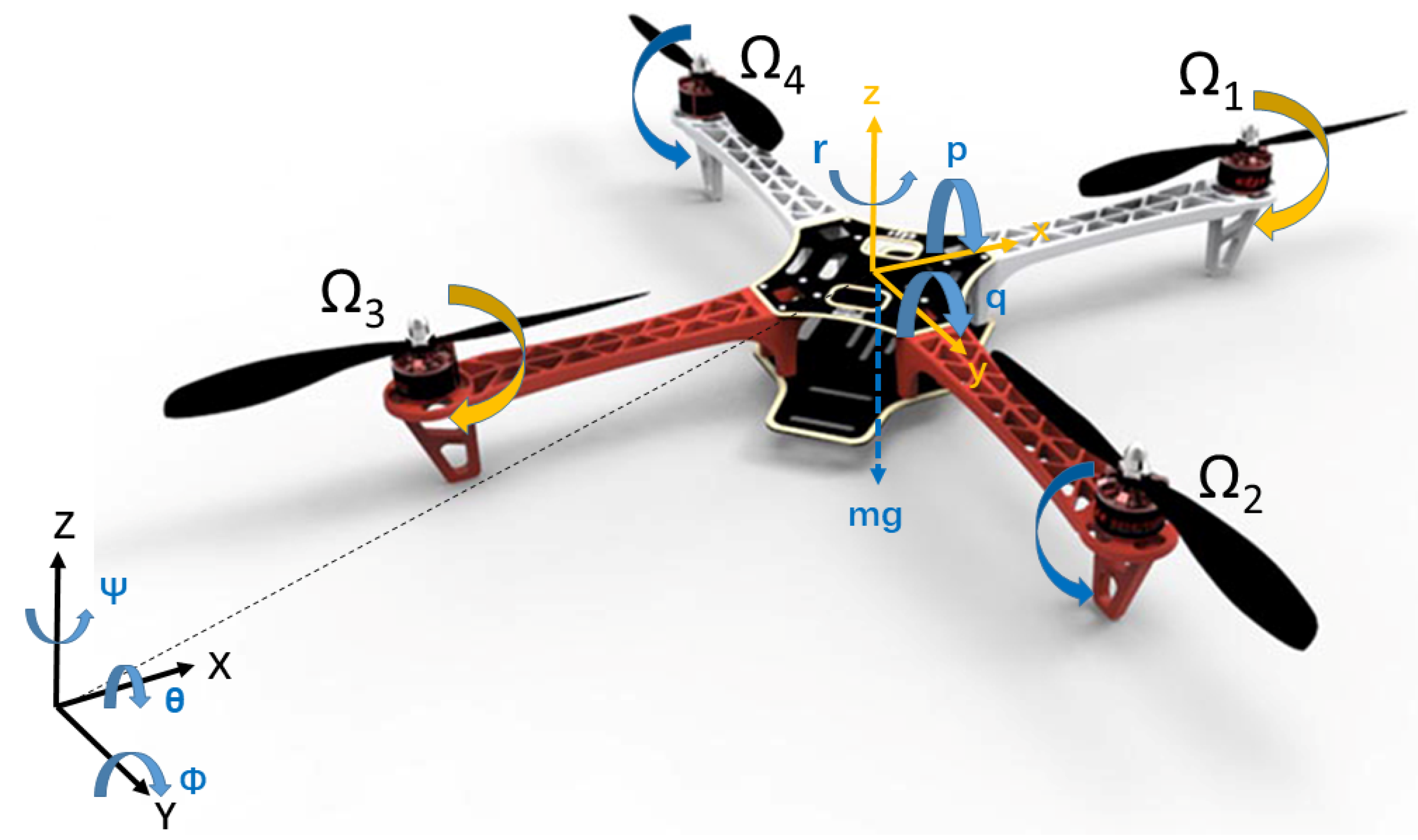
2.1. The Modeling of the Quadrotor Helicopter
2.2. The 3D Schematic and Modeling of the Soft Landing Gear
- The ideal touchdown velocities and posture of the quadrotor helicopter.
- Suitable mechanical and material properties of the landing gear to absorb the high-speed impact force to protect the body of the UAV, as seen in Figure 3.
- To fulfill the requirements for drones to achieve successful touchdown, the landing structures must meet the need to absorb the impact forces during the landing contact.
3. Controller Design and Stability Analysis
3.1. PID Position and Altitude Control Design
3.2. RBFNN-Based Backstepping Attitude Control Design
3.3. RBFNN-Based Observer
3.4. Stability Analysis
4. Simulation
- The quadrotor started from an initial position .
- The quadrotor flew to the position and hovered there for attitude control tests; these results can be seen in Figure 8.
- The quadrotor descended to the position with a speed between 5–8 m/s.
- The quadrotor, then, received the landing position . The UAV began to adjust its altitude, attitude, and velocity for the landing tests.
- The quadrotor landed on the target without a high-speed impact.
5. Outdoor Experiment of the Quadrotor with Soft Landing Gears
- Flight SystemAutopilot devices: The onboard flight assistant device is a Pixhack-V5 flight autopilot board. The board is based on the Pixhawk open hardware design; it runs PX4 on the NuttX OS and is fully compatible with the PX4 firmware [38,39].Airframe: The structure of the quadrotor cross-shaped frame was built using polyvinyl chloride (PVC). The quadrotor UAV is equipped with four brushless DC motors and four Electronic Speed Controllers (ESCs).Attitude and altitude control: The 3D position is estimated by jointly using IMU and GPS.Communication Protocol: The communication link used onboard is the Mavlink protocol. The IMU and the onboard processor use this protocol to send command data [40]. The UAV and GCS are connected through a universal asynchronous receiver/transmitter (UART).
- Landing SystemControl devices: A PDMS-based four-finger soft landing gear mounted on the bottom the quadrotor body.
6. Conclusion and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Ding, X.; Yu, Y. Motion Planning and Stabilization Control of a Multipropeller Multifunction Aerial Robot. IEEE/ASME Trans. Mechatron. 2013, 18, 645–656. [Google Scholar] [CrossRef]
- Sun, W.; Gao, H.; Kaynak, O. Adaptive Backstepping Control for Active Suspension Systems with Hard Constraints. IEEE/ASME Trans. Mechatron. 2013, 18, 1072–1079. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467. [Google Scholar] [CrossRef] [PubMed]
- Omari, S.; Hua, M.D.; Ducard, G.; Hamel, T. Hardware and Software Architecture for Nonlinear Control of Multirotor Helicopters. IEEE/ASME Trans. Mechatron. 2013, 18, 1724–1736. [Google Scholar] [CrossRef]
- Zhang, G.; He, Y.; Dai, B.; Gu, F.; Yang, L.; Han, J.; Liu, G. Aerial Grasping of an Object in the Strong Wind: Robust Control of an Aerial Manipulator. Appl. Sci. 2019, 9, 2230. [Google Scholar] [CrossRef]
- Lee, D.; Franchi, A.; Son, H.I.; Ha, C.; Bülthoff, H.H.; Giordano, P.R. Semiautonomous Haptic Teleoperation Control Architecture of Multiple Unmanned Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2013, 18, 1334–1345. [Google Scholar] [CrossRef]
- Johnson, A.; Montgomery, J.; Matthies, L. Vision Guided Landing of an Autonomous Helicopter in Hazardous Terrain. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Templeton, T.; Shim, D.H.; Geyer, C.; Sastry, S.S. Autonomous Vision-based Landing and Terrain Mapping Using an MPC-controlled Unmanned Rotorcraft. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Roma, Italy, 10–14 April 2007. [Google Scholar]
- Kendoul, F. Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Barton, J.D. A Biologically-Inspired Micro Aerial Vehicle—Sensing, Modeling and Control Strategies. Johns Hopkins APL Tech. Dig. 2012, 31, 153–178. [Google Scholar]
- Bosch, S.; Lacroix, S.; Caballero, F. Autonomous Detection of Safe Landing Areas for an UAV from Monocular Images. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Beijing, China, 9–15 October 2006. [Google Scholar]
- Scherer, S.; Chamberlain, L.; Singh, S. Autonomous landing at unprepared sites by a full-scale helicopter. Robot. Auton. Syst. 2012, 60, 1545–1562. [Google Scholar] [CrossRef]
- Brockers, R.; Bouffard, P.; Ma, J.; Matthies, L.; Tomlin, C. Autonomous landing and ingress of micro-air-vehicles in urban environments based on monocular vision. In Proceedings of the SPIE 8031, Micro- and Nanotechnology Sensors, Systems, and Applications III, Orlando, FL, USA, 25–29 April 2011. [Google Scholar]
- Cory, R.; Tedrakey, R. Experiments in Fixed-Wing UAV Perching. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- Zhang, K.; Chermprayong, P.; Tzoumanikas, D.; Li, W.; Grimm, M.; Smentoch, M.; Leutenegger, S.; Kovac, M. Bioinspired design of a landing system with soft shock absorbers for autonomous aerial robots. J. Field Robot. 2019, 36, 230–251. [Google Scholar] [CrossRef]
- Desbiens, A.L.; Asbeck, A.T.; Cutkosky, M.R. Landing, perching and taking off from vertical surfaces. Int. J. Robot. Res. 2011, 30, 355–370. [Google Scholar] [CrossRef]
- Doyle, C.E.; Bird, J.J.; Isom, T.A.; Johnson, C.J.; Kallman, J.C.; Simpson, J.A.; King, R.J.; Abbott, J.J.; Minor, M.A. Avian-inspired passive perching mechanism for robotic rotorcraft. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Nguyen, H.N.; Siddall, R.; Stephens, B.; Navarro-Rubio, A.; Kovač, M. A Passively Adaptive Microspine Grapple for Robust, Controllable Perching. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 80–87. [Google Scholar]
- Liang, X.; Fang, Y.; Sun, N.; Lin, H. Nonlinear hierarchical control for unmanned quadrotor transportation systems. IEEE Trans. Ind. Electron. 2017, 65, 3395–3405. [Google Scholar] [CrossRef]
- Qian, L.; Liu, H.H. Path Following Control of A Quadrotor UAV with A Cable Suspended Payload Under Wind Disturbances. IEEE IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Switching model predictive attitude control for a quadrotor helicopter subject to atmospheric disturbances. Control Eng. Pract. 2011, 19, 1195–1207. [Google Scholar] [CrossRef]
- Wang, L.; Su, J. Robust disturbance rejection control for attitude tracking of an aircraft. IEEE Trans. Control Syst. Technol. 2015, 23, 2361–2368. [Google Scholar] [CrossRef]
- Benallegue, A.; Mokhtari, A.; Fridman, L. High-order sliding-mode observer for a quadrotor UAV. Int. J. Robust Nonlinear Control IFAC-Affil. J. 2008, 18, 427–440. [Google Scholar] [CrossRef]
- Ordaz, J.; Salazar, S.; Mondié, S.; Romero, H.; Lozano, R. Predictor-based position control of a quad-rotor with delays in GPS and vision measurements. J. Intell. Robot. Syst. 2013, 70, 13–26. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, J.W.; Yu, Y.; Sun, C.Y. Robust attitude control of an indoor micro quadrotor with input delay. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 2363–2368. [Google Scholar]
- Rosales, C.; Soria, C.M.; Rossomando, F.G. Identification and adaptive PID Control of a hexacopter UAV based on neural networks. Int. J. Adapt. Control Signal Process. 2019, 33, 74–91. [Google Scholar] [CrossRef]
- Furukawa, S.; Kondo, S.; Takanishi, A.; Lim, H.O. Radial basis function neural network based PID control for quad-rotor flying robot. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 580–584. [Google Scholar]
- Kantue, P.; Pedro, J.O. Nonlinear Identification of an Unmanned Quadcopter Rotor Dynamics using RBF Neural Networks. In Proceedings of the 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 10–12 October 2018; pp. 292–298. [Google Scholar]
- Bouabdallah, S.; Siegwart, R. Full control of a quadrotor. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 153–158. [Google Scholar]
- Tayebi, A.; McGilvray, S. Attitude stabilization of a VTOL quadrotor aircraft. IEEE Trans. Control Syst. Technol. 2006, 14, 562–571. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Y.; Yu, Y.; Sun, C. Nonlinear Robust Compensation Method for Trajectory Tracking Control of Quadrotors. IEEE Access 2019. [Google Scholar] [CrossRef]
- Hoffmann, G.; Huang, H.; Waslander, S.; Tomlin, C. Quadrotor helicopter flight dynamics and control: Theory and experiment. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6461. [Google Scholar]
- Tran, D.T.; Nguyen, M.N.; Ahn, K.K. RBF Neural Network Based Backstepping Control for an Electrohydraulic Elastic Manipulator. Appl. Sci. 2019, 9, 2237. [Google Scholar] [CrossRef]
- Ge, S.S.; Hang, C.C.; Lee, T.H.; Zhang, T. Stable Adaptive Neural Network Control; Springer Science & Business Media: Berlin, Germany, 2013; Volume 13. [Google Scholar]
- He, W.; Chen, Y.; Yin, Z. Adaptive neural network control of an uncertain robot with full-state constraints. IEEE Trans. Cybern. 2016, 46, 620–629. [Google Scholar] [CrossRef] [PubMed]
- Peng, C.; Bai, Y.; Gong, X.; Gao, Q.; Zhao, C.; Tian, Y. Modeling and robust backstepping sliding mode control with Adaptive RBFNN for a novel coaxial eight-rotor UAV. IEEE/CAA J. Autom. Sin. 2015, 2, 56–64. [Google Scholar]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Meier, L.; Tanskanen, P.; Fraundorfer, F.; Pollefeys, M. Pixhawk: A system for autonomous flight using onboard computer vision. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2992–2997. [Google Scholar]
- Meier, L.; Tanskanen, P.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision. Auton. Robot. 2012, 33, 21–39. [Google Scholar] [CrossRef]
- Marty, J.A. Vulnerability Analysis of the Mavlink Protocol for Command and Control of Unmanned Aircraft; Technical Report; Graduate School of Engineering and Management, Air Force Institute of Technology: Wright-Patterson AFB, OH, USA, 2013. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Units |
|---|---|---|---|
| m | Mass | 2 | kg |
| l | Body length | 450 | mm |
| r | Rotor radius | 100 | mm |
| Moment of Inertia | 1.85 | 10 | |
| Moment of Inertia | 1.85 | ||
| Moment of I nertia | 2.98 |
| Parameter | Roll | Pitch | Yaw |
|---|---|---|---|
| 11 | 14 | 12 | |
| k | 0.4 | 0.4 | 0.3 |
| 16 | 23 | 21 | |
| h | 1.1 | 3.9 | 1.2 |
| Attitude | Setting Time (s) | Steady-State Error (Degree) |
|---|---|---|
| Pitch | 1.1 | 0 |
| Roll | 2.0 | 0 |
| Yaw | 1.1 | 0 |
| RMSE Horizontal X,Y [m] | 0.03 |
| RMSE Vertical Z [m] | 0.02 |
| RMSE Horizontal X,Y [m] | 0.07 |
| RMSE Vertical Z [m] | 0.06 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, C.; Zhao, W.; Du, Z.; Yu, L. A Neural Network Based Landing Method for an Unmanned Aerial Vehicle with Soft Landing Gears. Appl. Sci. 2019, 9, 2976. https://doi.org/10.3390/app9152976
Luo C, Zhao W, Du Z, Yu L. A Neural Network Based Landing Method for an Unmanned Aerial Vehicle with Soft Landing Gears. Applied Sciences. 2019; 9(15):2976. https://doi.org/10.3390/app9152976
Chicago/Turabian StyleLuo, Cai, Weikang Zhao, Zhenpeng Du, and Leijian Yu. 2019. "A Neural Network Based Landing Method for an Unmanned Aerial Vehicle with Soft Landing Gears" Applied Sciences 9, no. 15: 2976. https://doi.org/10.3390/app9152976
APA StyleLuo, C., Zhao, W., Du, Z., & Yu, L. (2019). A Neural Network Based Landing Method for an Unmanned Aerial Vehicle with Soft Landing Gears. Applied Sciences, 9(15), 2976. https://doi.org/10.3390/app9152976