Author Contributions
Conceptualization, G.Z. and A.L.; Data curation, G.Z. and Z.X.; Formal analysis, G.Z.; Funding acquisition, G.Z., A.L. and J.L.; Investigation, G.Z. and M.D.; Methodology, G.Z. and M.D.; Project administration, G.Z. and Z.X.; Software, G.Z.; Supervision, A.L.; Validation, G.Z. and M.D.; Writing—original draft, G.Z.; Writing—review & editing, L.Z.
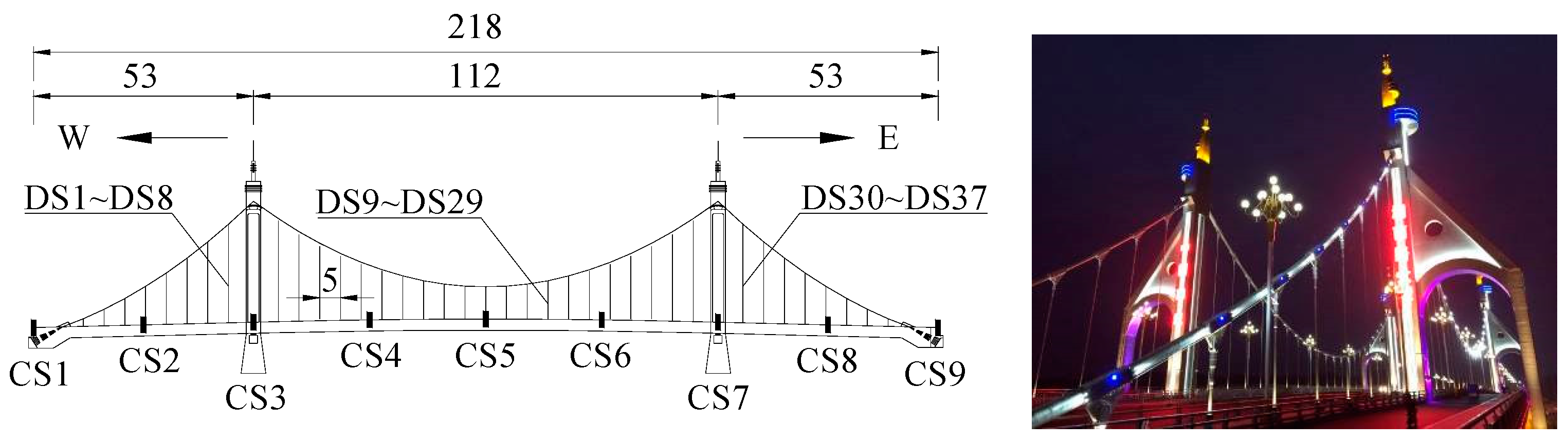
Figure 1.
Global layout of the Hunan Road Bridge (Unit: m).
Figure 1.
Global layout of the Hunan Road Bridge (Unit: m).
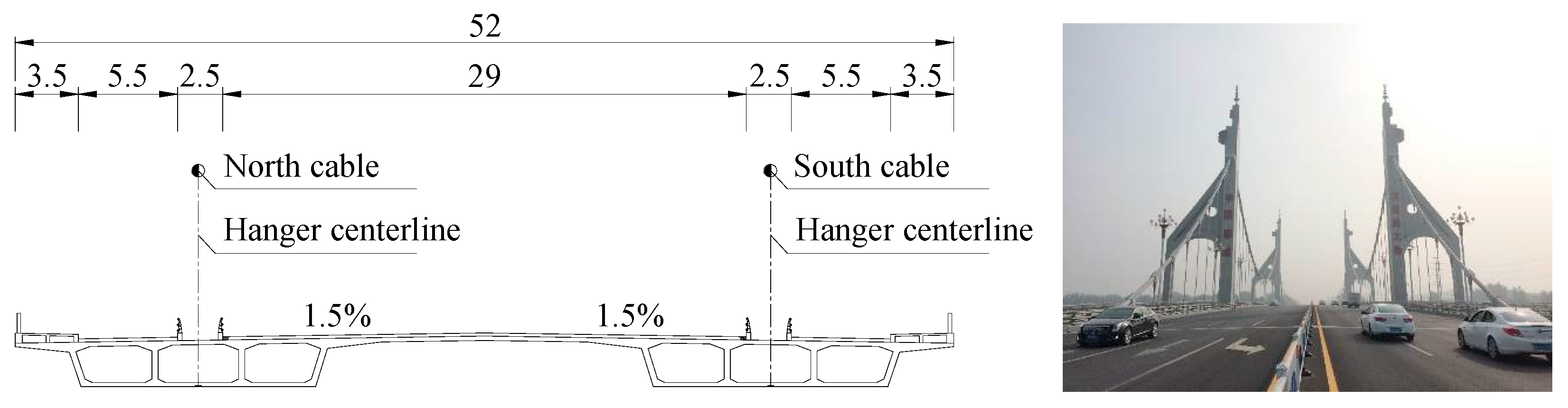
Figure 2.
Cable system and extra-wide girder (Unit: m).
Figure 2.
Cable system and extra-wide girder (Unit: m).
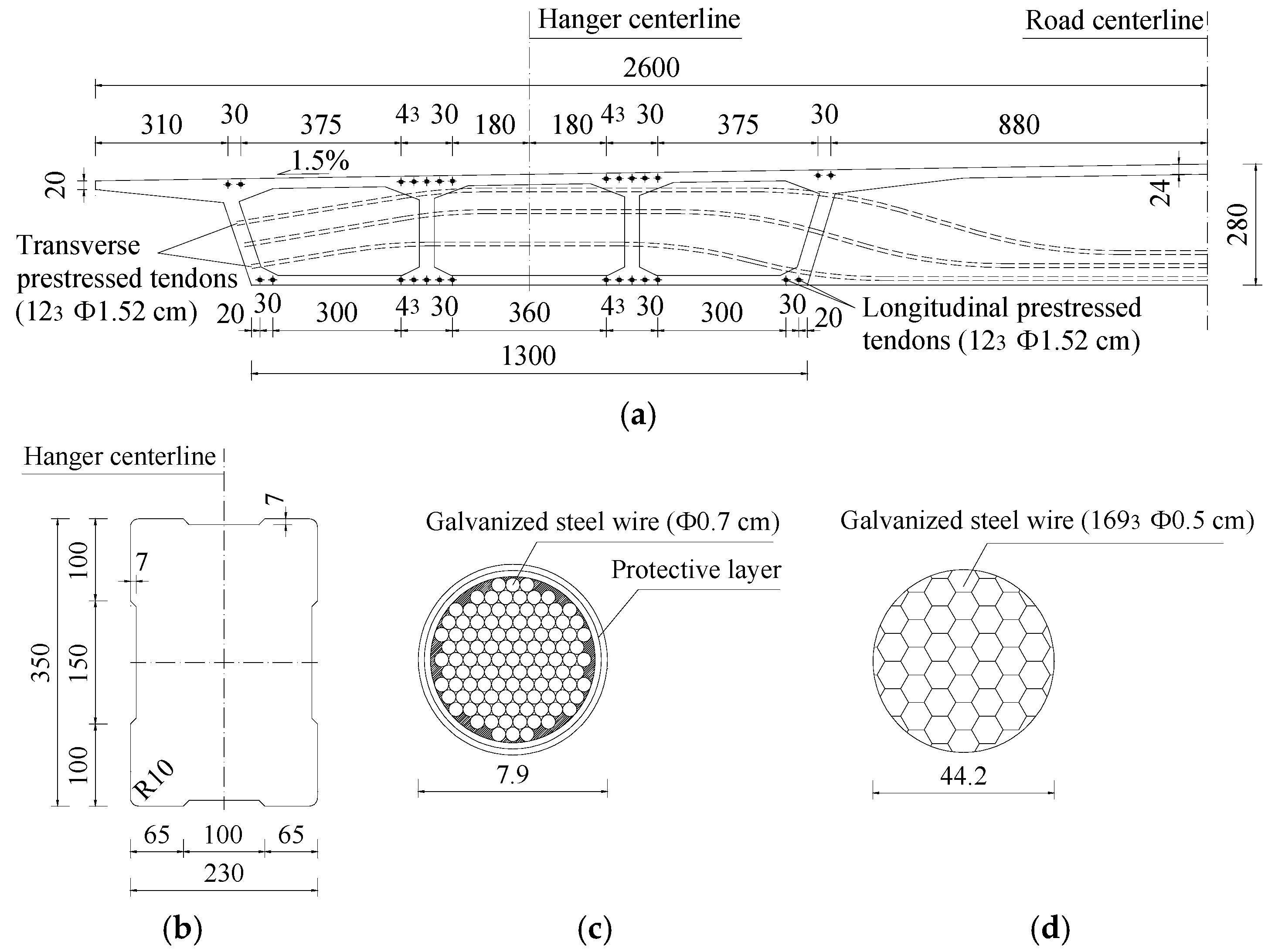
Figure 3.
Cross section of key component: (a) half part of girder, (b) tower, (c) hanger, and (d) cable (Unit: cm).
Figure 3.
Cross section of key component: (a) half part of girder, (b) tower, (c) hanger, and (d) cable (Unit: cm).
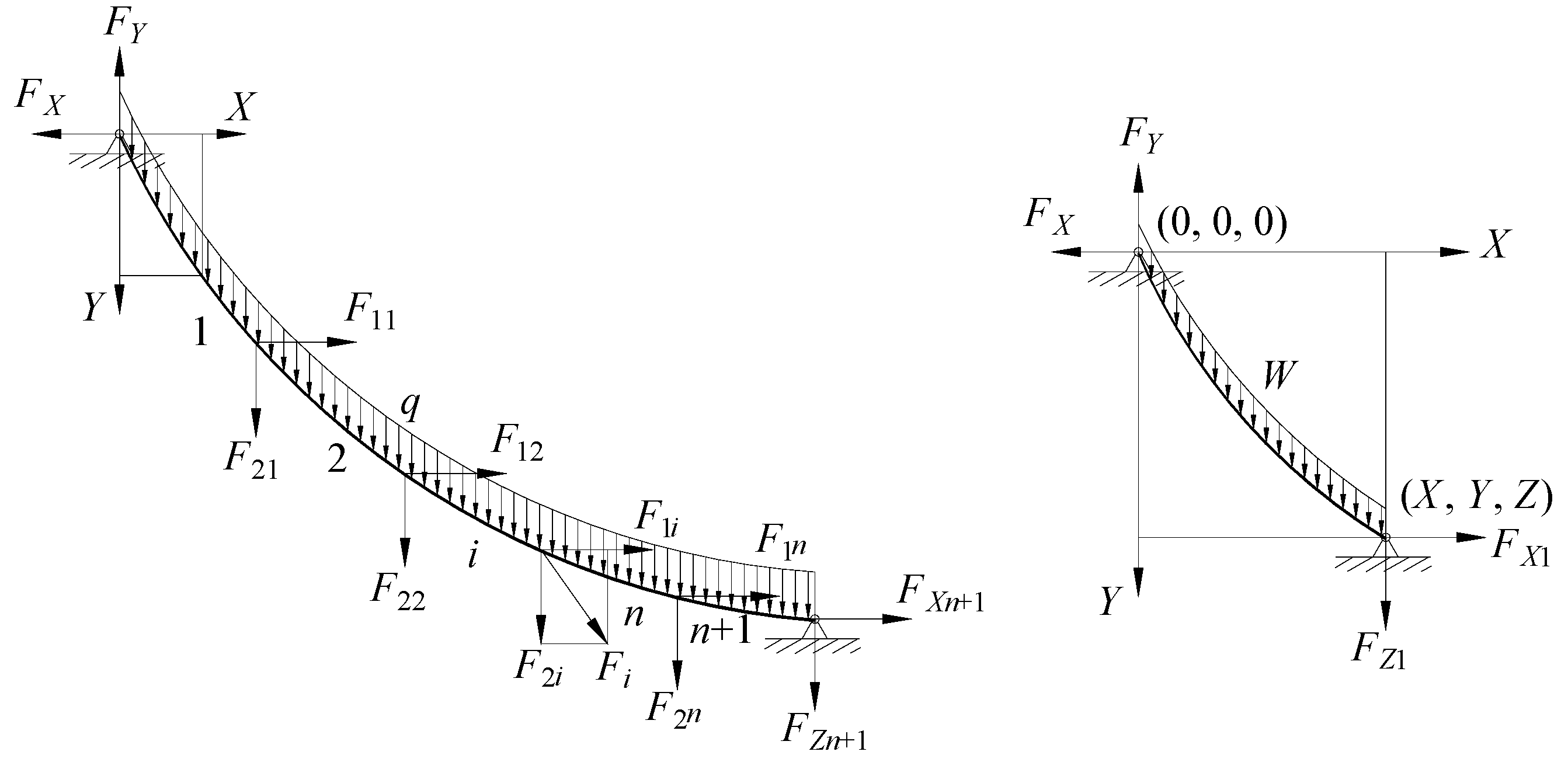
Figure 4.
Forced state of cable at the completion state.
Figure 4.
Forced state of cable at the completion state.
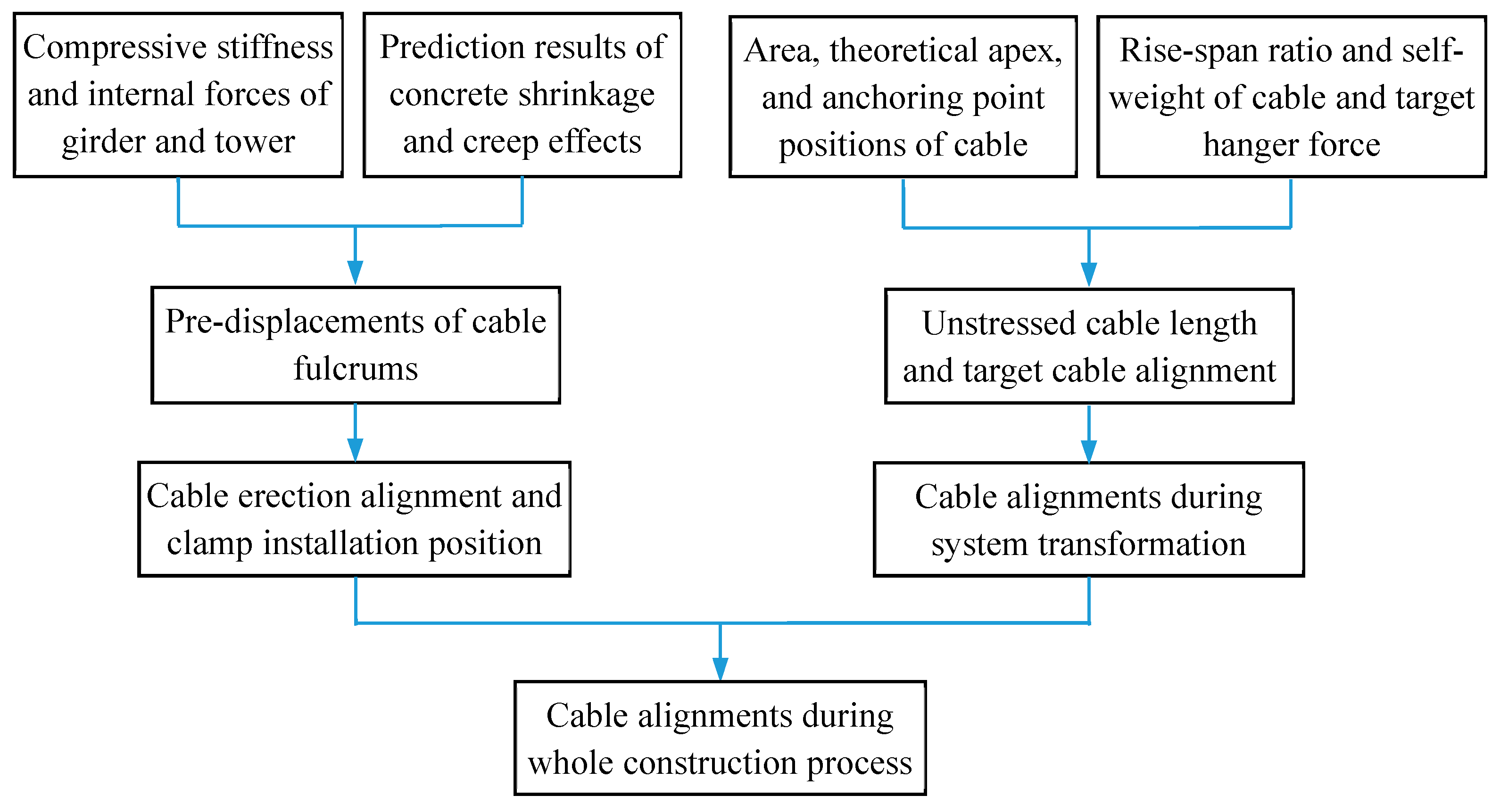
Figure 5.
Numerical algorithm of the cable system for a concrete self-anchored suspension bridge.
Figure 5.
Numerical algorithm of the cable system for a concrete self-anchored suspension bridge.
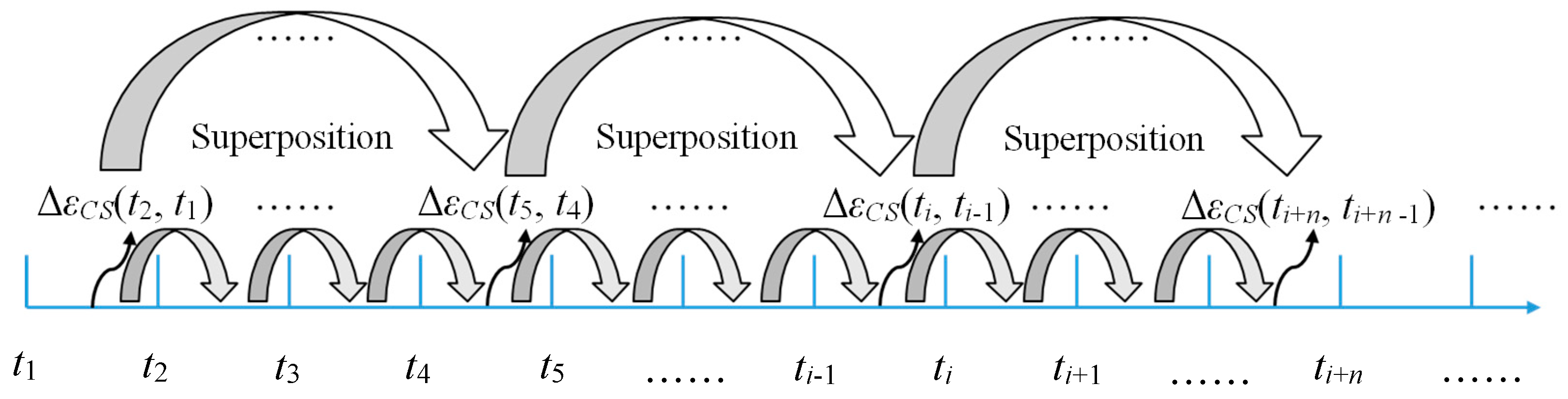
Figure 6.
Schematic diagram of the stepwise analysis of concrete shrinkage and creep effect.
Figure 6.
Schematic diagram of the stepwise analysis of concrete shrinkage and creep effect.
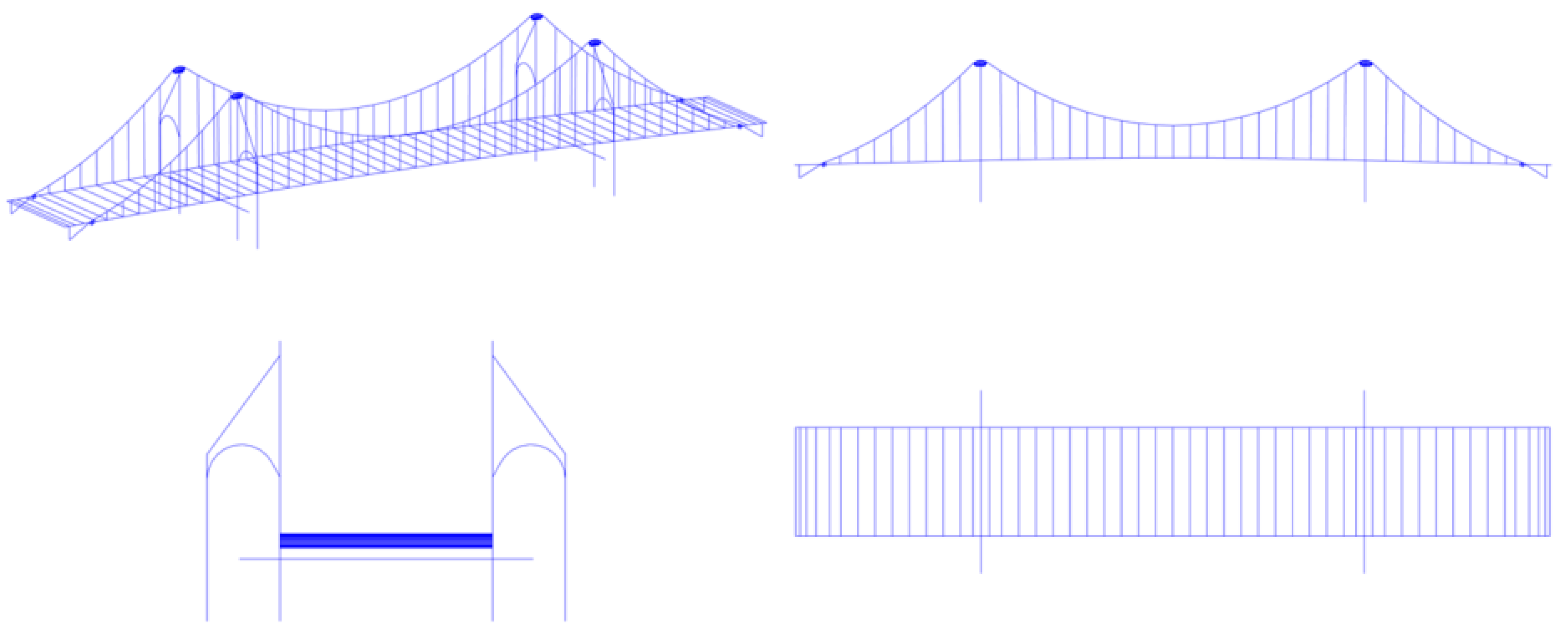
Figure 7.
Spatial FE mode of the Hunan Road Bridge.
Figure 7.
Spatial FE mode of the Hunan Road Bridge.
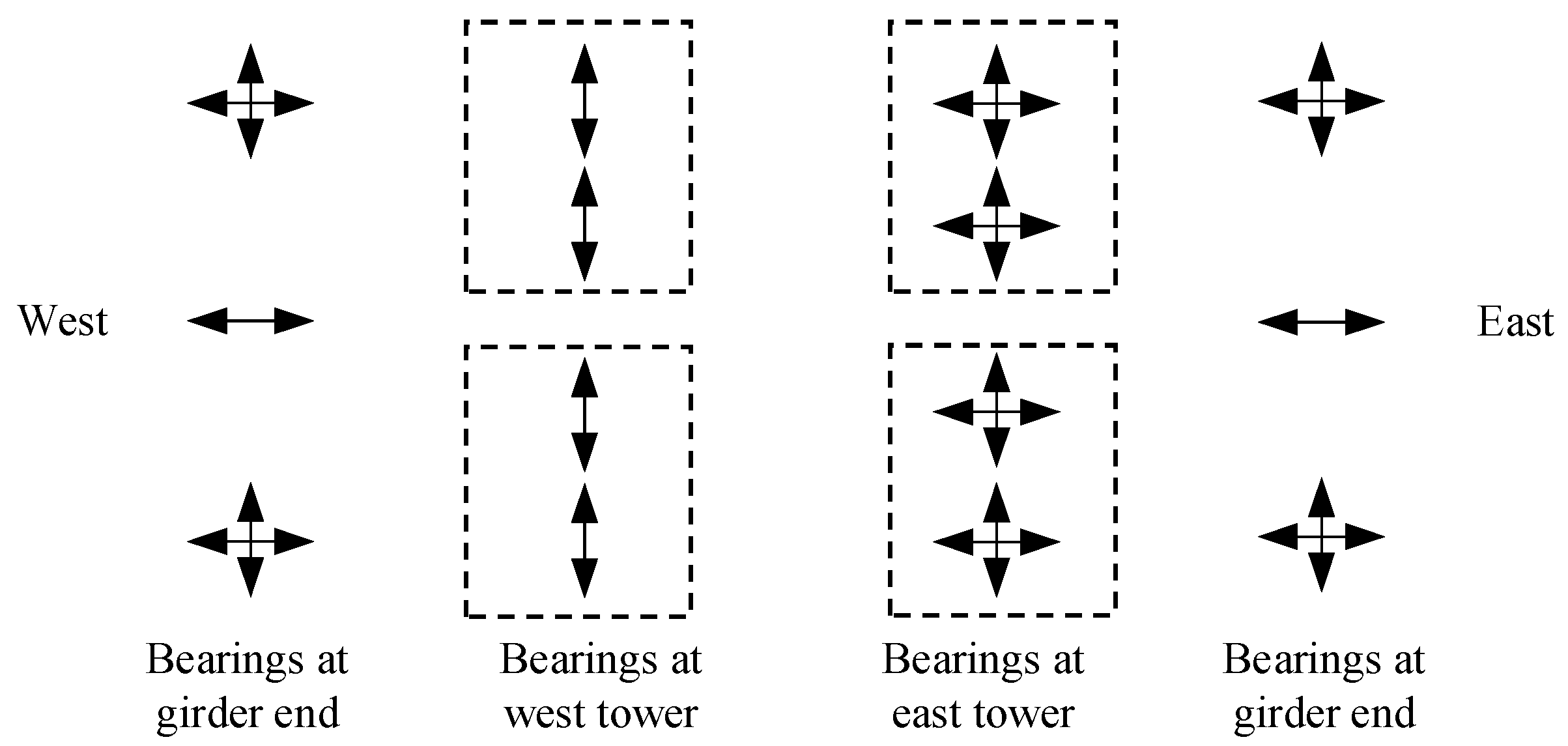
Figure 8.
Bearing types of the Hunan Road Bridge (The dashed boxes represent the locations of towers).
Figure 8.
Bearing types of the Hunan Road Bridge (The dashed boxes represent the locations of towers).
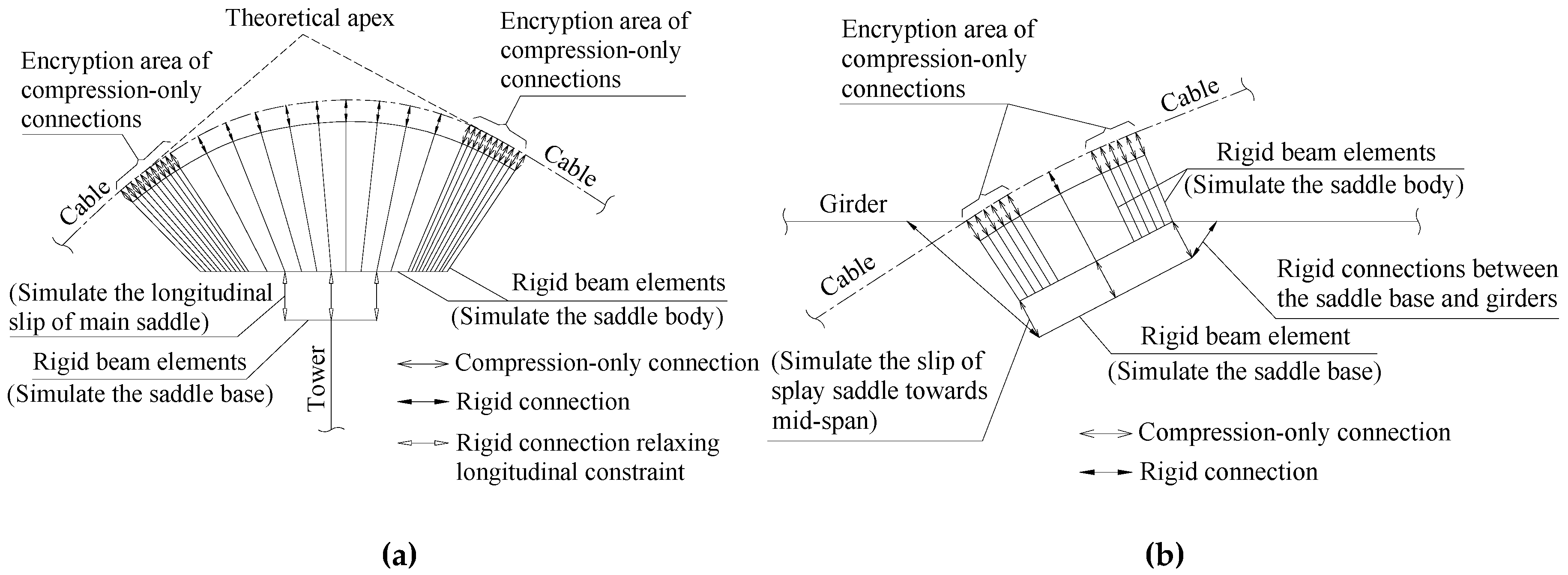
Figure 9.
Refined FE models of cable saddles: (a) Main saddle. (b) Splay saddle.
Figure 9.
Refined FE models of cable saddles: (a) Main saddle. (b) Splay saddle.
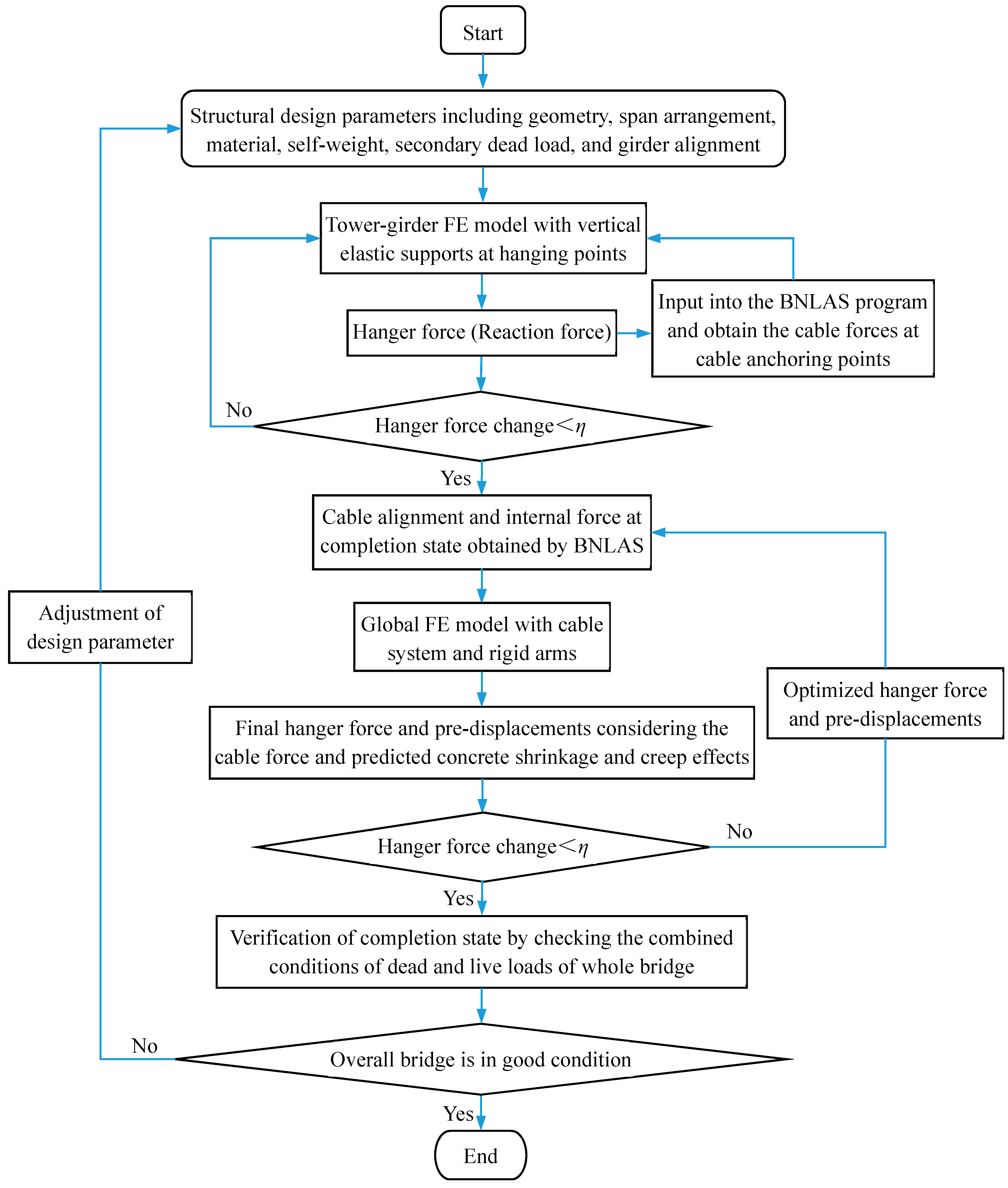
Figure 10.
Algorithm flowchart of reasonable completion state determination for concrete self-anchored suspension bridge.
Figure 10.
Algorithm flowchart of reasonable completion state determination for concrete self-anchored suspension bridge.
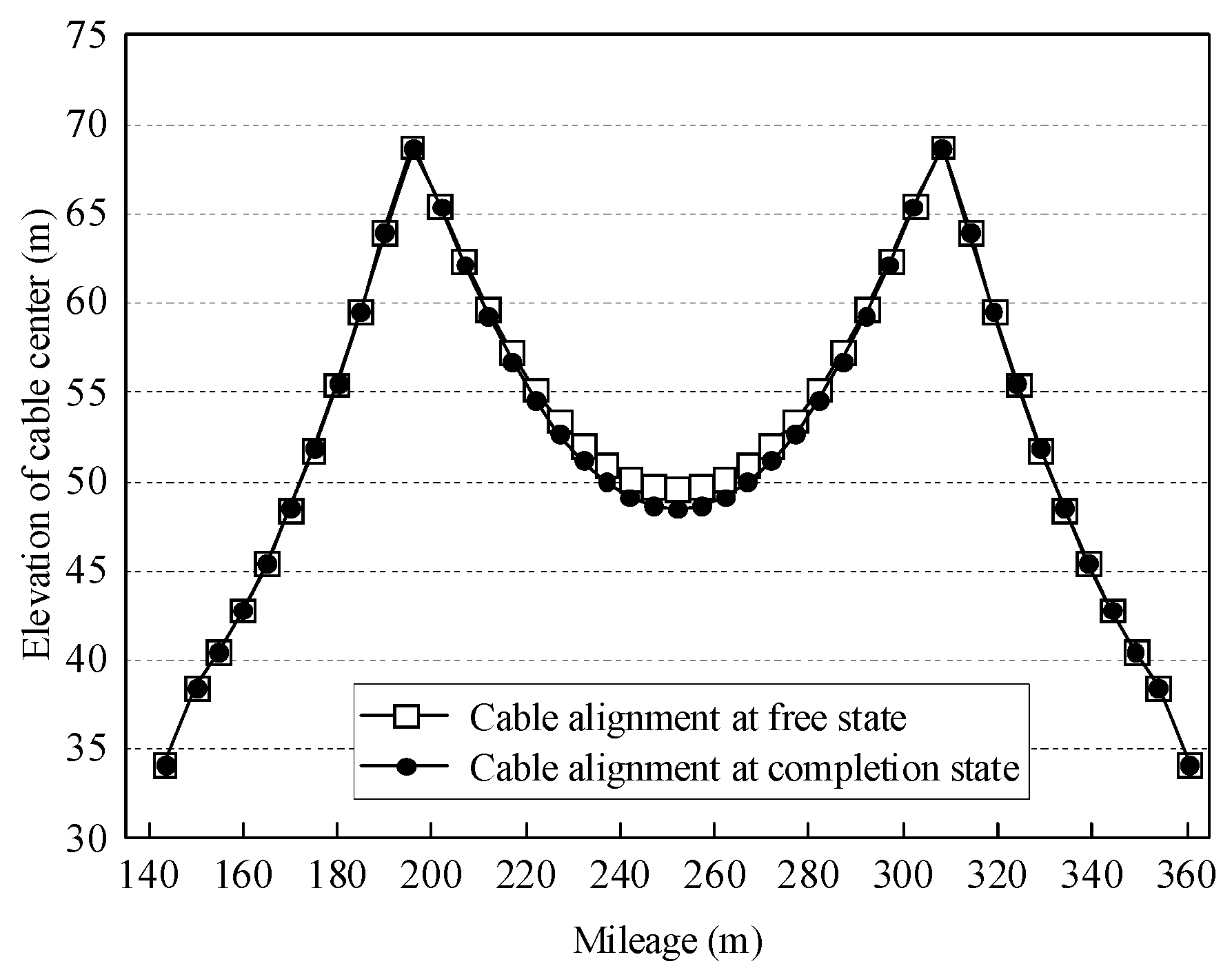
Figure 11.
Results of cable alignments at erection and completion states of the Hunan Road Bridge.
Figure 11.
Results of cable alignments at erection and completion states of the Hunan Road Bridge.
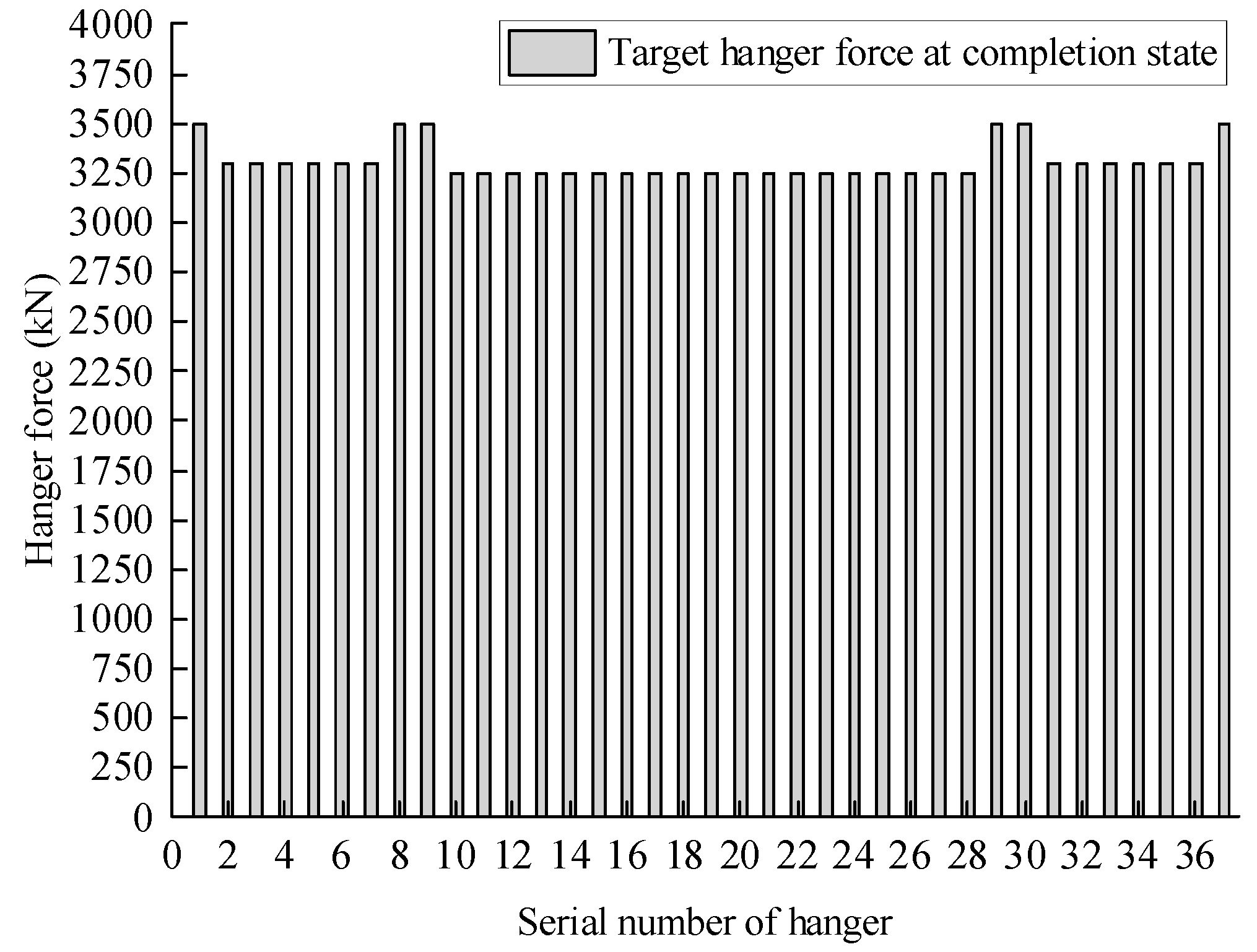
Figure 12.
Target hanger force at the completion state (Unit: kN).
Figure 12.
Target hanger force at the completion state (Unit: kN).
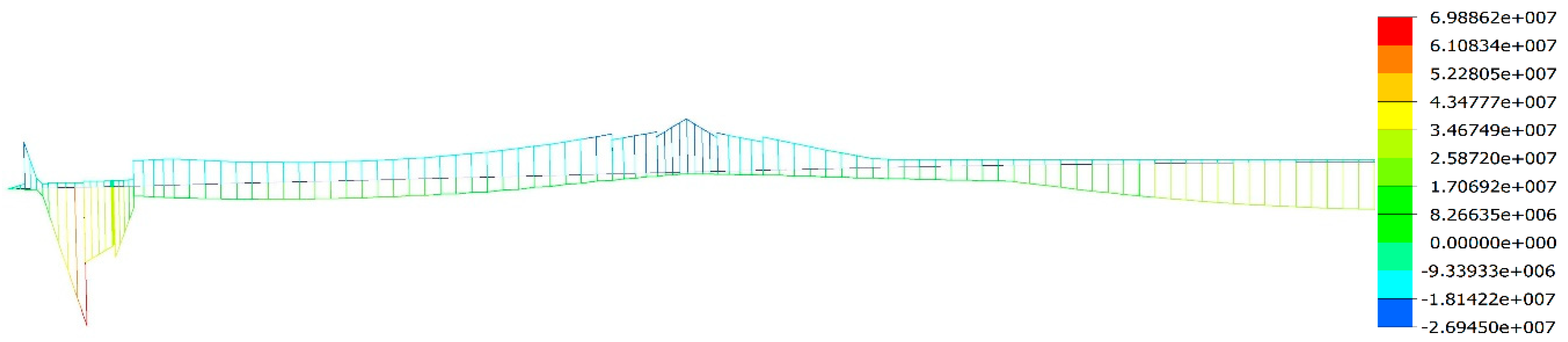
Figure 13.
Moment envelope diagram of girder under the combined condition of dead and live loads (Unit: N·m).
Figure 13.
Moment envelope diagram of girder under the combined condition of dead and live loads (Unit: N·m).
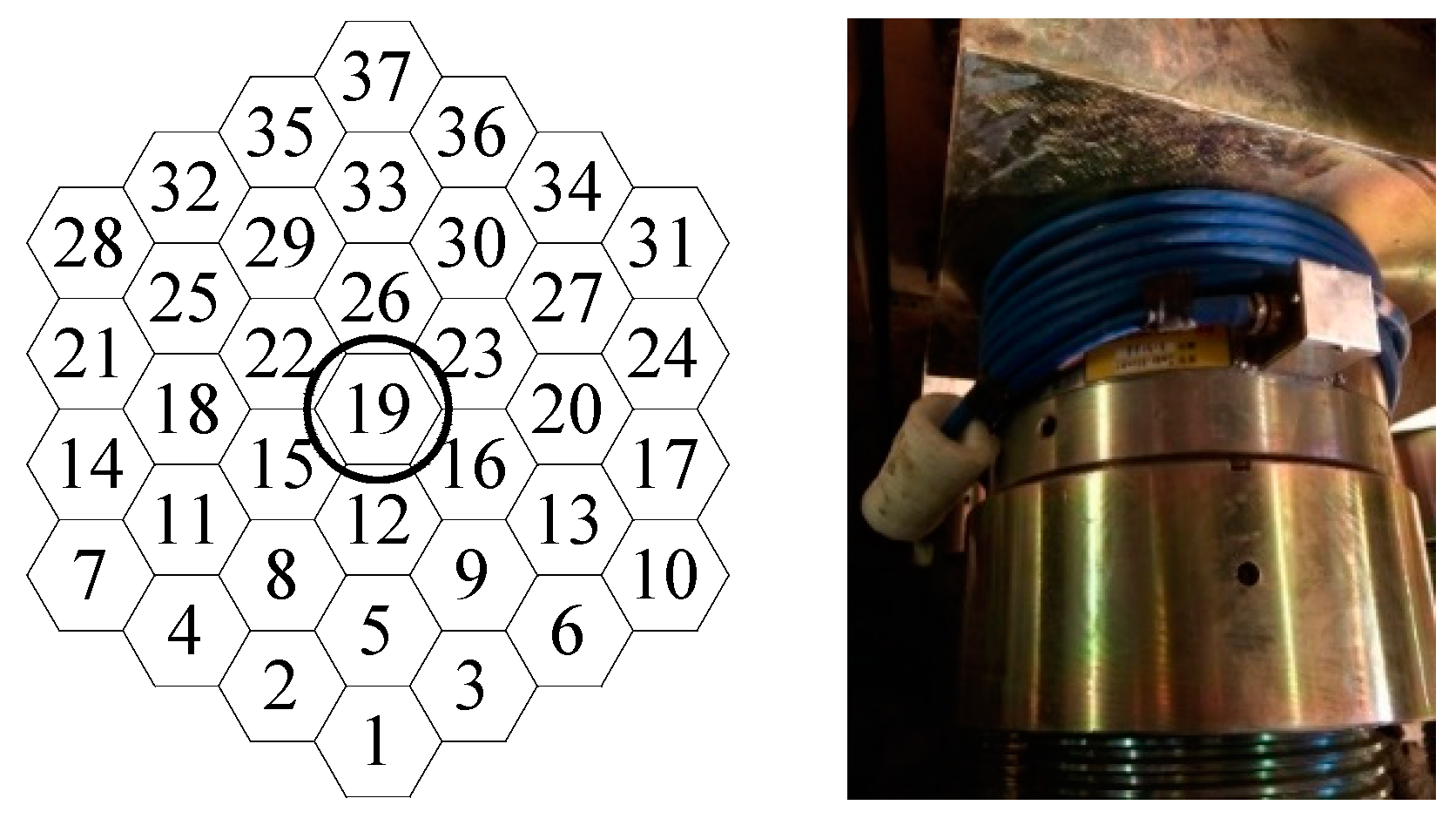
Figure 14.
Schematic diagram of cable strand and the photo of the pressure sensor installment.
Figure 14.
Schematic diagram of cable strand and the photo of the pressure sensor installment.
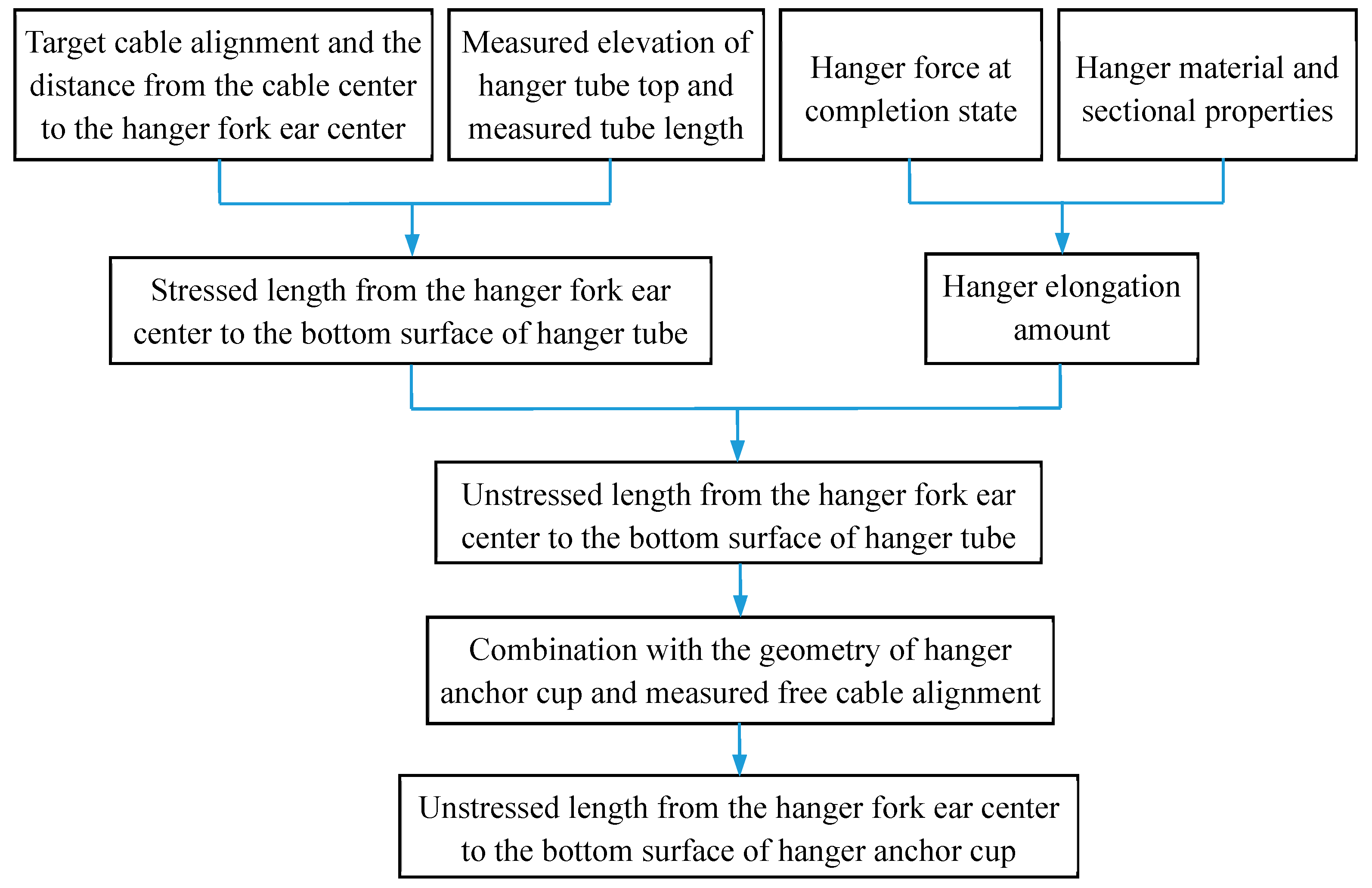
Figure 15.
Algorithm flowchart of the determination method of unstressed hanger length.
Figure 15.
Algorithm flowchart of the determination method of unstressed hanger length.
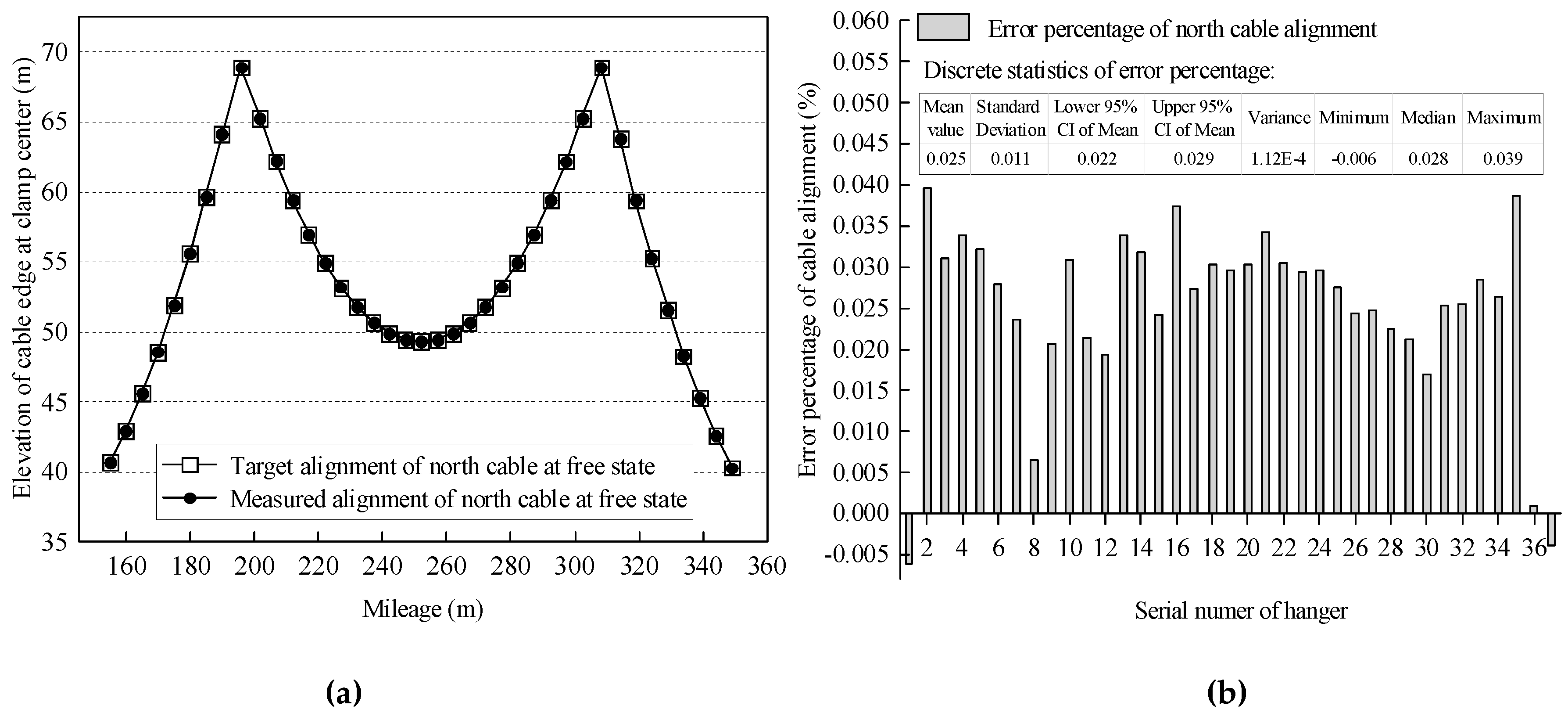
Figure 16.
Erection alignment of north cable. (a) Cable alignment. (b) Error percentage.
Figure 16.
Erection alignment of north cable. (a) Cable alignment. (b) Error percentage.
Figure 17.
Calculation schematic and photo of the multiple-control method for system transformation.
Figure 17.
Calculation schematic and photo of the multiple-control method for system transformation.
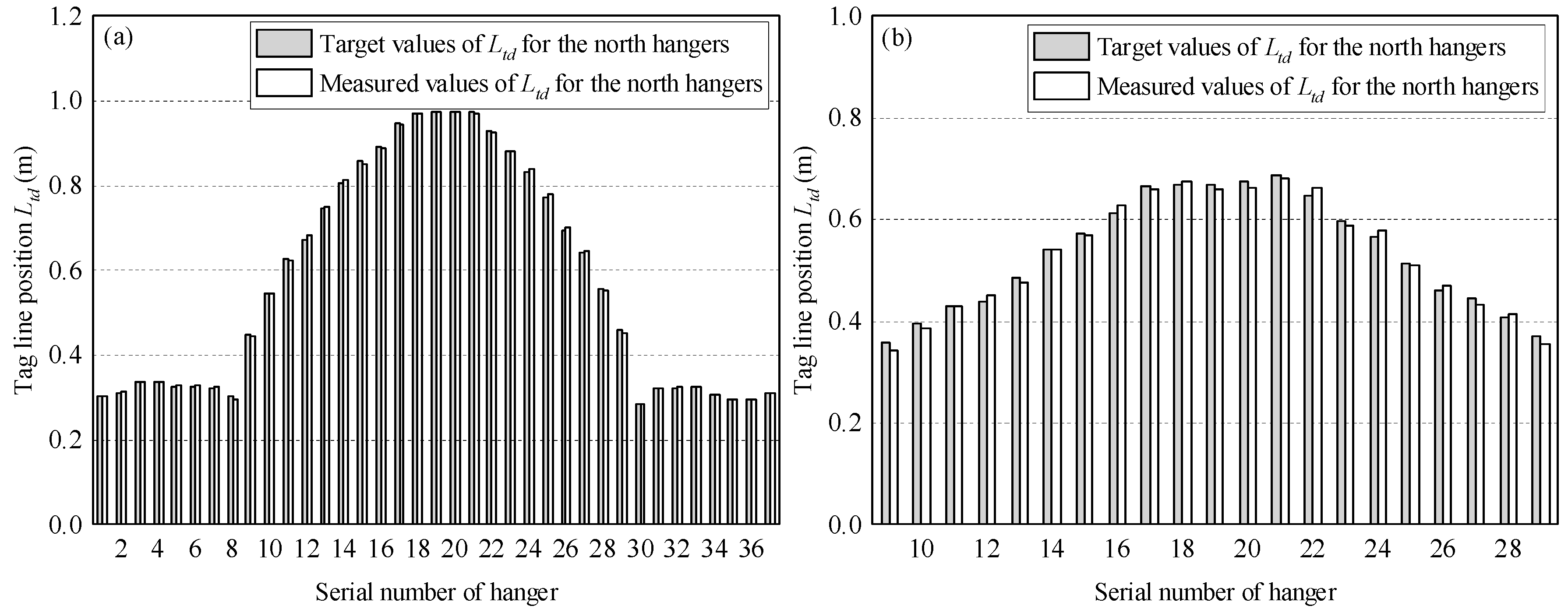
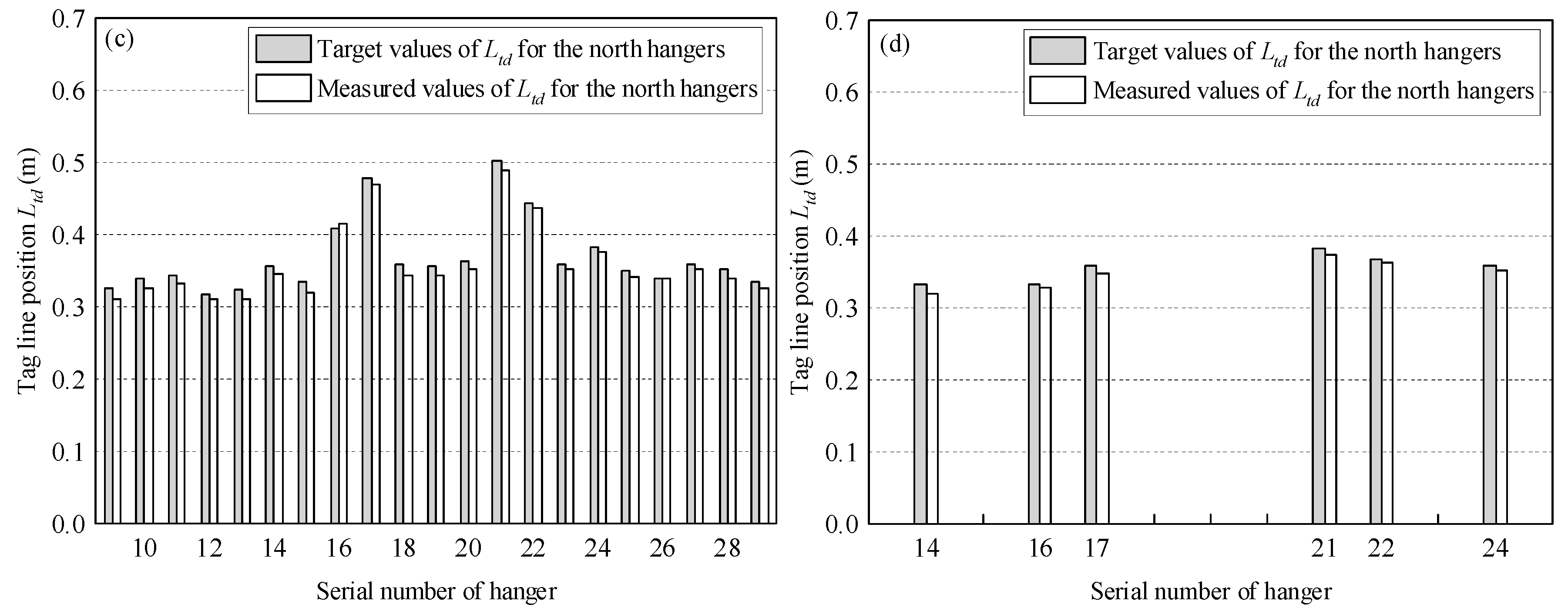
Figure 18.
Comparisons of the tag line positions of north hangers. (a) Tensioning round 1. (b) Tensioning round 2. (c) Tensioning round 3. (d) Tensioning round 4.
Figure 18.
Comparisons of the tag line positions of north hangers. (a) Tensioning round 1. (b) Tensioning round 2. (c) Tensioning round 3. (d) Tensioning round 4.
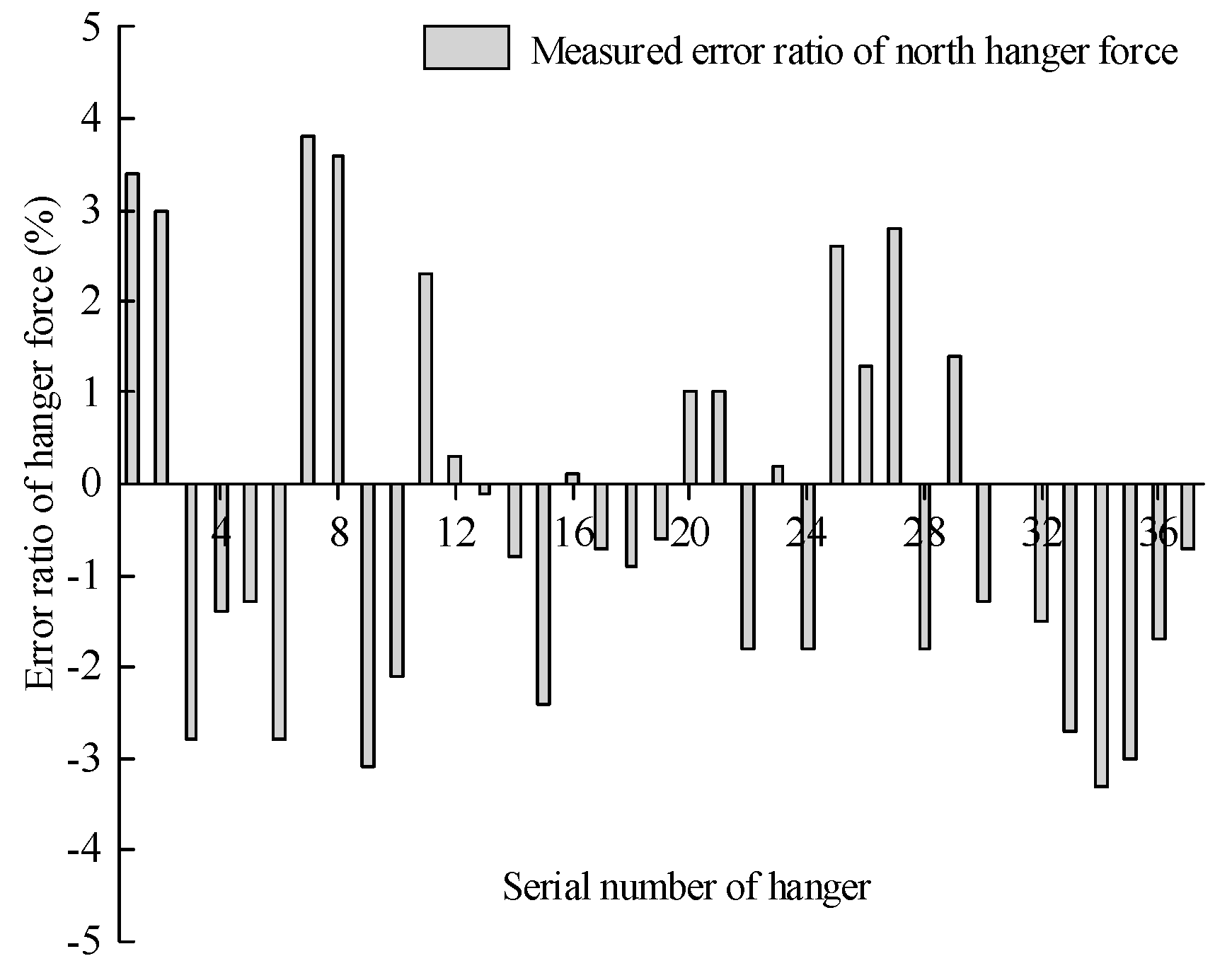
Figure 19.
Measured error of the final hanger force.
Figure 19.
Measured error of the final hanger force.
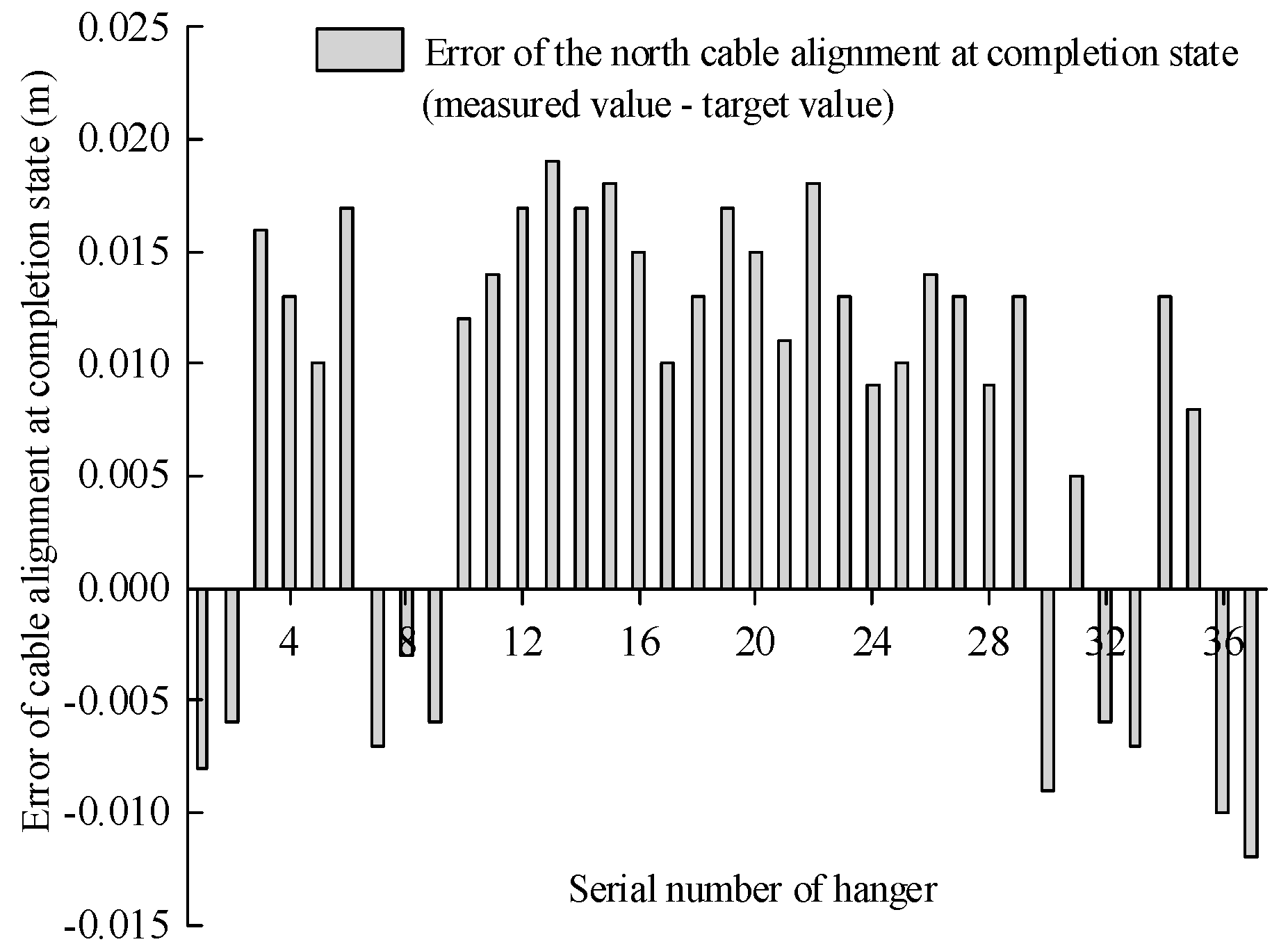
Figure 20.
Comparison of the final cable alignment.
Figure 20.
Comparison of the final cable alignment.
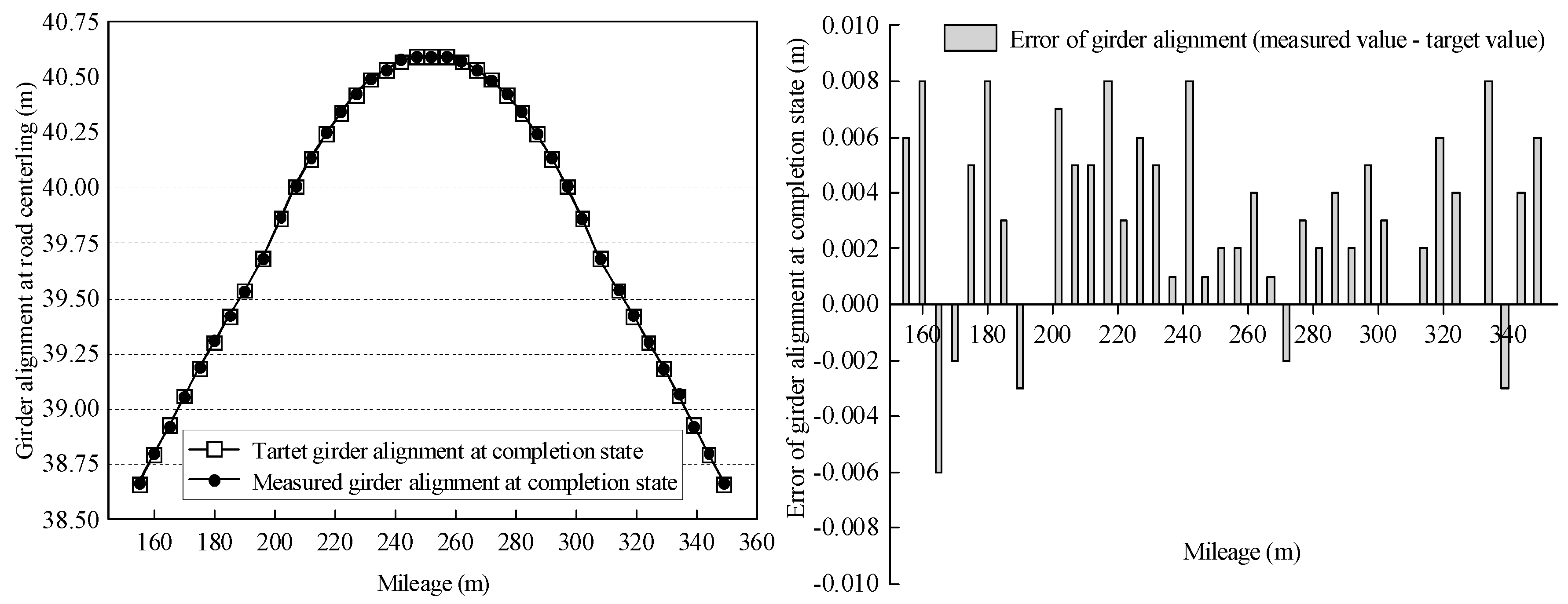
Figure 21.
Measured girder alignment at completion state and error.
Figure 21.
Measured girder alignment at completion state and error.
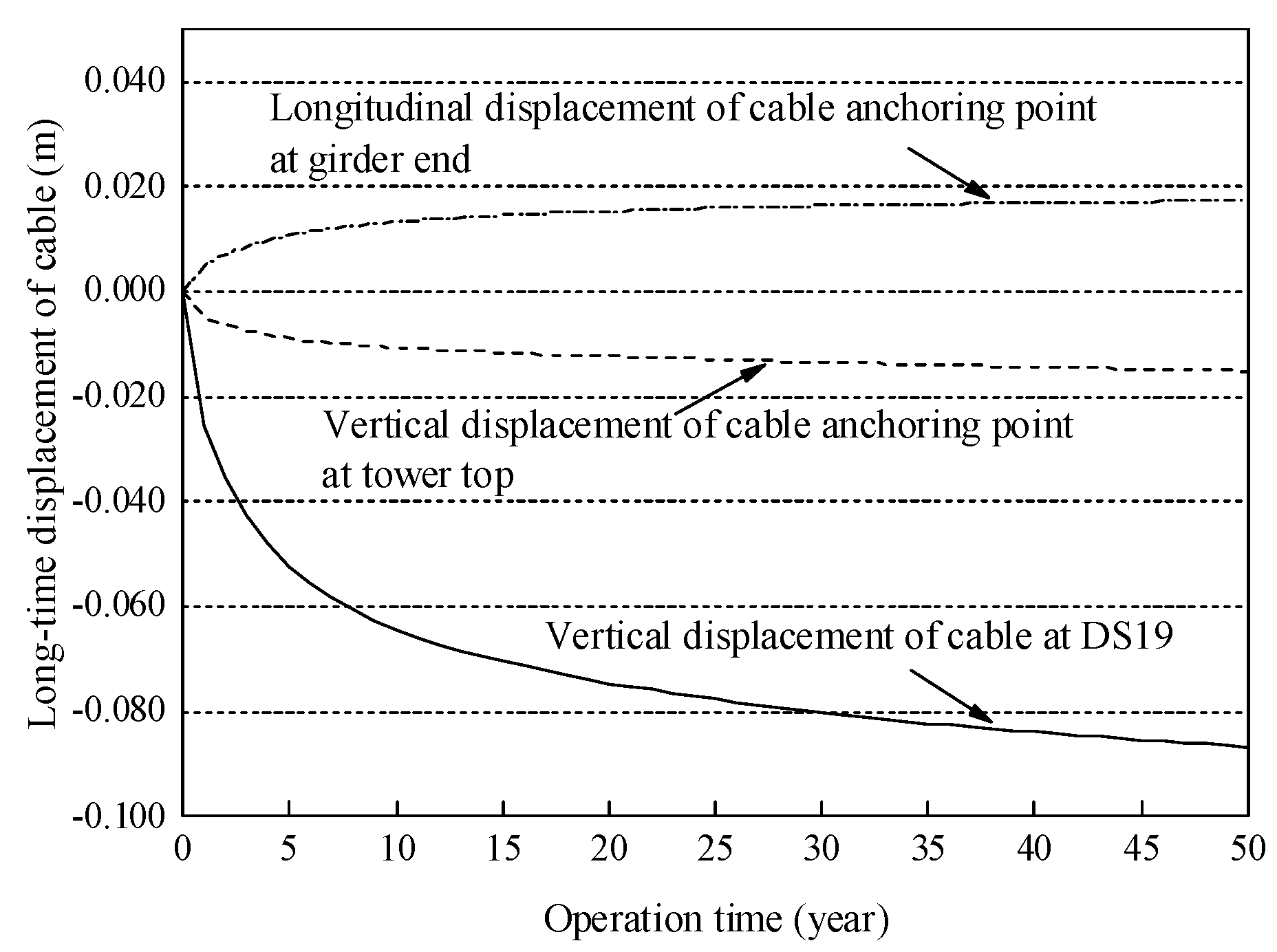
Figure 22.
Predicted cable displacement.
Figure 22.
Predicted cable displacement.
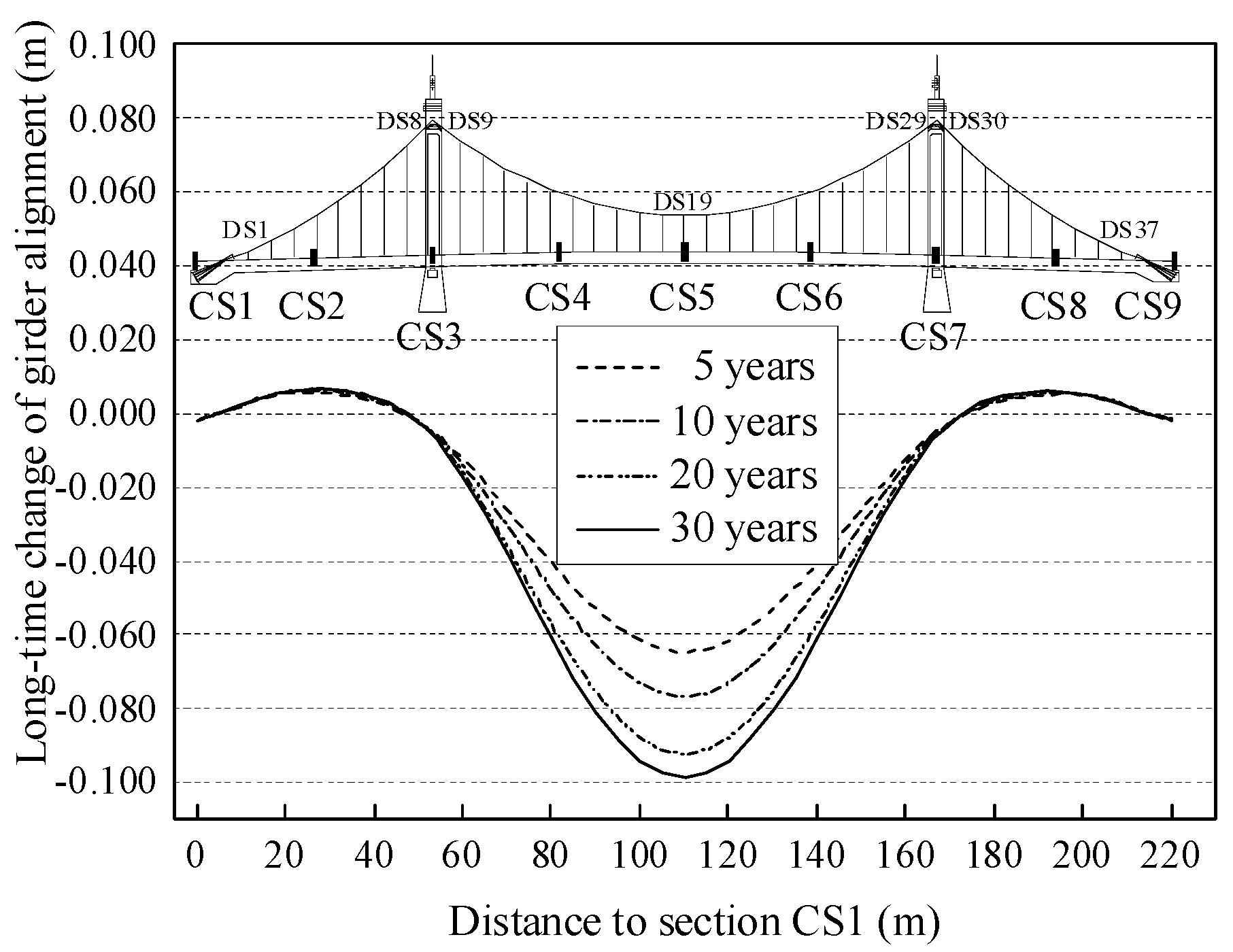
Figure 23.
Predicted girder displacement.
Figure 23.
Predicted girder displacement.
Table 1.
Typical cross-sectional properties and material parameters of the Hunan Road Bridge.
Table 1.
Typical cross-sectional properties and material parameters of the Hunan Road Bridge.
| Component Type | Section Area A (m2) | Elastic Modulus E (MPa) | Density ρ (kg/m3) | Ix (m4) | Iy (m4) | Iz (m4) |
|---|
| Cable | Cable | 0.148 | 2.00 × 105 | 8005 | —— | —— | —— |
| Flexible hanger of type A | 4.89 × 10−3 | 2.05 × 105 | 8005 | —— | —— | —— |
| Flexible hanger of type B | 5.35 × 10−3 | 2.05 × 105 | 8005 | —— | —— | —— |
| Rigid hanger | 0.011 | 2.00 × 105 | 8005 | —— | —— | —— |
| Girder | Main girder | 13.947 | 3.45 × 104 | 2549 | 21.631 | 13.809 | 569.453 |
| Crossbeam | 1.250 | 3.45 × 104 | 2549 | 0.499 × 10−17 | 0.651 | 0.026 |
| Tower | Main tower | 8.050 | 3.25 × 104 | 2549 | 0.833 × 10−16 | 3.549 | 8.218 |
| Crossbeam | 3.105 | 3.25 × 104 | 2549 | 0.419 × 10−9 | 2.037 | 1.510 |
Table 2.
Specific step of tensioning round 1.
Table 2.
Specific step of tensioning round 1.
| Step | Description | Step | Description |
|---|
| 1-1 | The main saddles on the west and east towers were pushed 8.6 cm and 7.1 cm respectively towards the middle. | 1-7 | DS4, DS14, DS24, DS34 |
| 1-2 | DS8 DS9, DS29, DS30 | 1-8 | DS3, DS15, DS23, DS35 |
| 1-3 | DS7, DS10, DS28, DS31 | 1-9 | DS16, DS22 |
| 1-4 | DS6, DS11, DS27, DS32 | 1-10 | DS2, DS17, DS21, DS36 |
| 1-5 | DS5, DS12, DS26, DS33 | 1-11 | DS18, DS20 |
| 1-6 | DS13, DS25 | 1-12 | DS1, DS37, DS19 |
Table 3.
Target values of the control parameters of tensioning round 1 (Unit: m).
Table 3.
Target values of the control parameters of tensioning round 1 (Unit: m).
| North Side | South Side |
|---|
| Hanger | Lsa | Ltd | Hanger | Lsa | Ltd | Hanger | Lsa | Ltd | Hanger | Lsa | Ltd |
|---|
| DS1-N | 0.228 | 0.303 | DS20-N | −0.432 | 0.974 | DS1-S | 0.234 | 0.294 | DS20-S | −0.443 | 0.982 |
| DS2-N | 0.229 | 0.312 | DS21-N | −0.434 | 0.973 | DS2-S | 0.244 | 0.298 | DS21-S | −0.429 | 0.969 |
| DS3-N | 0.223 | 0.337 | DS22-N | −0.386 | 0.929 | DS3-S | 0.237 | 0.305 | DS22-S | −0.403 | 0.942 |
| DS4-N | 0.204 | 0.335 | DS23-N | −0.339 | 0.882 | DS4-S | 0.218 | 0.319 | DS23-S | −0.358 | 0.904 |
| DS5-N | 0.213 | 0.327 | DS24-N | −0.292 | 0.832 | DS5-S | 0.223 | 0.319 | DS24-S | −0.299 | 0.840 |
| DS6-N | 0.217 | 0.326 | DS25-N | −0.229 | 0.772 | DS6-S | 0.210 | 0.334 | DS25-S | −0.240 | 0.783 |
| DS7-N | 0.218 | 0.322 | DS26-N | −0.155 | 0.695 | DS7-S | 0.220 | 0.318 | DS26-S | −0.169 | 0.709 |
| DS8-N | 0.239 | 0.303 | DS27-N | −0.098 | 0.641 | DS8-S | 0.225 | 0.314 | DS27-S | −0.110 | 0.653 |
| DS9-N | 0.090 | 0.448 | DS28-N | −0.013 | 0.556 | DS9-S | 0.075 | 0.465 | DS28-S | −0.033 | 0.577 |
| DS10-N | −0.005 | 0.545 | DS29-N | 0.083 | 0.459 | DS10-S | −0.017 | 0.558 | DS29-S | 0.053 | 0.492 |
| DS11-N | −0.083 | 0.626 | DS30-N | 0.262 | 0.284 | DS11-S | −0.091 | 0.631 | DS30-S | 0.266 | 0.313 |
| DS12-N | −0.133 | 0.673 | DS31-N | 0.218 | 0.322 | DS12-S | −0.167 | 0.704 | DS31-S | 0.243 | 0.297 |
| DS13-N | −0.207 | 0.746 | DS32-N | 0.221 | 0.322 | DS13-S | −0.233 | 0.771 | DS32-S | 0.238 | 0.302 |
| DS14-N | −0.263 | 0.806 | DS33-N | 0.217 | 0.325 | DS14-S | −0.287 | 0.826 | DS33-S | 0.251 | 0.290 |
| DS15-N | −0.316 | 0.858 | DS34-N | 0.236 | 0.307 | DS15-S | −0.344 | 0.882 | DS34-S | 0.258 | 0.282 |
| DS16-N | −0.351 | 0.894 | DS35-N | 0.248 | 0.294 | DS16-S | −0.390 | 0.933 | DS35-S | 0.269 | 0.268 |
| DS17-N | −0.405 | 0.949 | DS36-N | 0.246 | 0.296 | DS17-S | −0.425 | 0.966 | DS36-S | 0.270 | 0.273 |
| DS18-N | −0.431 | 0.970 | DS37-N | 0.219 | 0.312 | DS18-S | −0.441 | 0.979 | DS37-S | 0.217 | 0.280 |
| DS19-N | −0.432 | 0.974 | —— | —— | —— | DS19-S | −0.450 | 0.989 | —— | —— | —— |
Table 4.
Specific step of tensioning round 2.
Table 4.
Specific step of tensioning round 2.
| Step | Description | Step | Description |
|---|
| 2-1 | Saddles were pushed 1.0 cm toward the mid-span. | 2-7 | Saddles were pushed 2.1 cm toward the mid-span. |
| 2-2 | DS9, DS10, DS28, DS29 | 2-8 | DS15, DS16, DS22, DS23 |
| 2-3 | Saddles were pushed 1.8 cm toward the mid-span. | 2-9 | Saddles were pushed 1.1 cm toward the mid-span. |
| 2-4 | DS11, DS12, DS26, DS27 | 2-10 | DS17, DS21 |
| 2-5 | Saddles were pushed 2.0 cm toward the mid-span. | 2-11 | Saddles were pushed 1.3 cm toward the mid-span. |
| 2-6 | DS13, DS14, DS24, DS25 | 2-12 | DS18, DS19, DS20 |
Table 5.
Target values of the control parameters of tensioning round 2.
Table 5.
Target values of the control parameters of tensioning round 2.
| North Side | South Side |
|---|
| Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) |
|---|
| DS9-N | 1700 | 0.359 | DS20-N | 2340 | 0.674 | DS9-S | 1700 | 0.376 | DS20-S | 2340 | 0.682 |
| DS10-N | 2150 | 0.397 | DS21-N | 3800 | 0.689 | DS10-S | 2150 | 0.410 | DS21-S | 3800 | 0.686 |
| DS11-N | 1650 | 0.431 | DS22-N | 3550 | 0.648 | DS11-S | 1650 | 0.436 | DS22-S | 3550 | 0.661 |
| DS12-N | 2700 | 0.440 | DS23-N | 2200 | 0.598 | DS12-S | 2700 | 0.471 | DS23-S | 2200 | 0.620 |
| DS13-N | 1950 | 0.487 | DS24-N | 3100 | 0.566 | DS13-S | 1950 | 0.512 | DS24-S | 3100 | 0.574 |
| DS14-N | 3100 | 0.540 | DS25-N | 1950 | 0.513 | DS14-S | 3100 | 0.560 | DS25-S | 1950 | 0.524 |
| DS15-N | 2200 | 0.574 | DS26-N | 2700 | 0.462 | DS15-S | 2200 | 0.598 | DS26-S | 2700 | 0.476 |
| DS16-N | 3550 | 0.613 | DS27-N | 1650 | 0.446 | DS16-S | 3550 | 0.652 | DS27-S | 1650 | 0.458 |
| DS17-N | 3800 | 0.666 | DS28-N | 2150 | 0.408 | DS17-S | 3800 | 0.683 | DS28-S | 2150 | 0.429 |
| DS18-N | 2340 | 0.670 | DS29-N | 1700 | 0.370 | DS18-S | 2340 | 0.679 | DS29-S | 1700 | 0.403 |
| DS19-N | 2340 | 0.669 | —— | —— | —— | DS19-S | 2340 | 0.685 | —— | —— | —— |
Table 6.
Specific steps of tensioning rounds 3 and 4.
Table 6.
Specific steps of tensioning rounds 3 and 4.
| Step | Description | Step | Description |
|---|
| 3-1 | Saddles were pushed 0.3 cm toward the mid-span. | 3-9 | Saddles were pushed 0.5 cm toward the mid-span. |
| 3-2 | DS9, DS10, DS28, DS29 | 3-10 | DS17, DS21 |
| 3-3 | Saddles were pushed 0.8 cm toward the mid-span. | 3-11 | Saddles were pushed 1.0 cm toward the mid-span. |
| 3-4 | DS11, DS12, DS26, DS27 | 3-12 | DS18, DS19, DS20 |
| 3-5 | Saddles were pushed 1.4 cm toward the mid-span. | 4-1 | Saddles were pushed 0.1 cm toward the mid-span. |
| 3-6 | DS13, DS14, DS24, DS25 | 4-2 | DS14, DS24 |
| 3-7 | Saddles were pushed 1.6 cm toward the mid-span. | 4-3 | Saddles were pushed 1.4 cm toward the mid-span. |
| 3-8 | DS15, DS16, DS22, DS23 | 4-4 | DS16, DS17, DS21, DS22 |
Table 7.
Target values of the control parameters of tensioning round 3.
Table 7.
Target values of the control parameters of tensioning round 3.
| North Side | South Side |
|---|
| Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) |
|---|
| DS9-N | 2850 | 0.327 | DS20-N | 4030 | 0.363 | DS9-S | 2850 | 0.343 | DS20-S | 4030 | 0.371 |
| DS10-N | 3010 | 0.341 | DS21-N | 4000 | 0.503 | DS10-S | 3010 | 0.354 | DS21-S | 4000 | 0.500 |
| DS11-N | 2650 | 0.345 | DS22-N | 4000 | 0.445 | DS11-S | 2650 | 0.350 | DS22-S | 4000 | 0.458 |
| DS12-N | 3620 | 0.318 | DS23-N | 3750 | 0.360 | DS12-S | 3620 | 0.349 | DS23-S | 3750 | 0.381 |
| DS13-N | 3050 | 0.325 | DS24-N | 4000 | 0.383 | DS13-S | 3050 | 0.350 | DS24-S | 4000 | 0.391 |
| DS14-N | 4000 | 0.357 | DS25-N | 3050 | 0.351 | DS14-S | 4000 | 0.377 | DS25-S | 3050 | 0.362 |
| DS15-N | 3750 | 0.335 | DS26-N | 3620 | 0.340 | DS15-S | 3750 | 0.359 | DS26-S | 3620 | 0.354 |
| DS16-N | 4000 | 0.410 | DS27-N | 2650 | 0.360 | DS16-S | 4000 | 0.449 | DS27-S | 2650 | 0.372 |
| DS17-N | 4000 | 0.479 | DS28-N | 3010 | 0.353 | DS17-S | 4000 | 0.496 | DS28-S | 3010 | 0.374 |
| DS18-N | 4030 | 0.359 | DS29-N | 2850 | 0.336 | DS18-S | 4030 | 0.368 | DS29-S | 2850 | 0.370 |
| DS19-N | 3180 | 0.358 | —— | —— | —— | DS19-S | 3180 | 0.374 | —— | —— | —— |
Table 8.
Target values of the control parameters of tensioning round 4.
Table 8.
Target values of the control parameters of tensioning round 4.
| North Side | South Side |
|---|
| Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) | Hanger | P (kN) | Ltd (m) |
|---|
| DS14-N | 3120 | 0.333 | DS21-N | 3120 | 0.383 | DS14-S | 3120 | 0.353 | DS21-S | 3120 | 0.380 |
| DS16-N | 3120 | 0.334 | DS22-N | 3120 | 0.369 | DS16-S | 3120 | 0.373 | DS22-S | 3120 | 0.382 |
| DS17-N | 3120 | 0.359 | DS24-N | 3120 | 0.359 | DS17-S | 3120 | 0.376 | DS24-S | 3120 | 0.367 |
Table 9.
Specific step and control parameter of tensioning round 5.
Table 9.
Specific step and control parameter of tensioning round 5.
| Step | North Side | South Side |
|---|
| Hanger | P (kN) | Hanger | P (kN) | Hanger | P (kN) | Hanger | P (kN) |
|---|
| 5-1 | B2 | 3380 | B30 | 3400 | N4 | 3080 | N32 | 3080 |
| B7 | 3500 | B31 | 3500 | N7 | 3380 | N33 | 3080 |
| 5-2 | B4 | 3140 | B32 | 3140 | N2 | 3370 | —— | —— |
| B5 | 3140 | B33 | 3140 | N10 | 3030 | —— | —— |
| B15 | 3060 | —— | —— | N15 | 3060 | —— | —— |
| 5-3 | B34 | 3080 | B36 | 3100 | N1 | 3620 | N37 | 3560 |
Table 10.
Comparison of cable force at completion state.
Table 10.
Comparison of cable force at completion state.
| Location | Cable | Measured Value (kN) | Target Value (kN) | Error Ratio (%) |
|---|
| West anchor end | North cable | 51763.156 | 52945.4 | ࢤ2.22 |
| South cable | 54320.910 | 52951.5 | 2.59 |
| East anchor end | North cable | 51587.652 | 52966.3 | ࢤ2.60 |
| South cable | 51585.725 | 52967.5 | ࢤ2.61 |
Table 11.
Parametric analysis result of the influence on girder state evolution brought by final girder geometry.
Table 11.
Parametric analysis result of the influence on girder state evolution brought by final girder geometry.
| Increasing Percentage of Hanger Force | Completion State after Equilibrium Analysis | Girder State after 50 Years |
|---|
| Girder Lifting Amount (m) | Girder Longitudinal Stress (MPa) | Girder Deflection (m) | Girder Longitudinal Stress (MPa) |
|---|
| Top Plate | Bottom Plate | Top Plate | Bottom Plate |
|---|
| 0% | 0.013 | −5.410 | −5.780 | −0.087 | −6.618 | −2.171 |
| 1% | 0.015 | −5.322 | −6.183 | −0.087 | −6.532 | −2.569 |
| 2% | 0.017 | −5.233 | −6.586 | −0.088 | −6.446 | −2.966 |
| 3% | 0.019 | −5.145 | −6.989 | −0.088 | −6.359 | −3.364 |
| 4% | 0.021 | −5.056 | −7.391 | −0.089 | −6.273 | −3.762 |
| 5% | 0.023 | −4.968 | −7.794 | −0.089 | −6.187 | −4.160 |



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}