Predictive Speed-Control Algorithm Based on a Novel Extended-State Observer for PMSM Drives




Abstract
1. Introduction
2. The Mathematical Model of PMSM
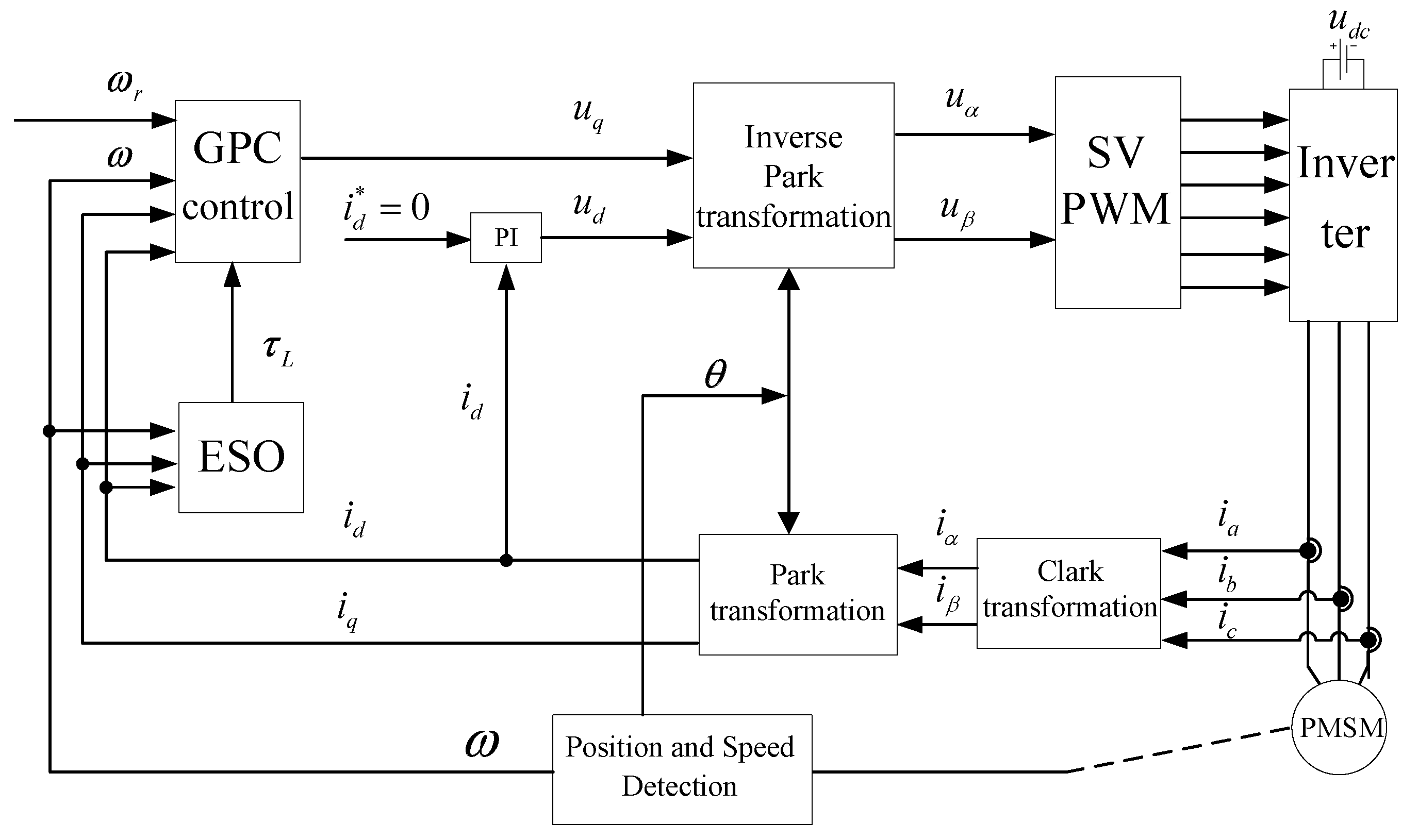
3. The Design of Predictive Controller
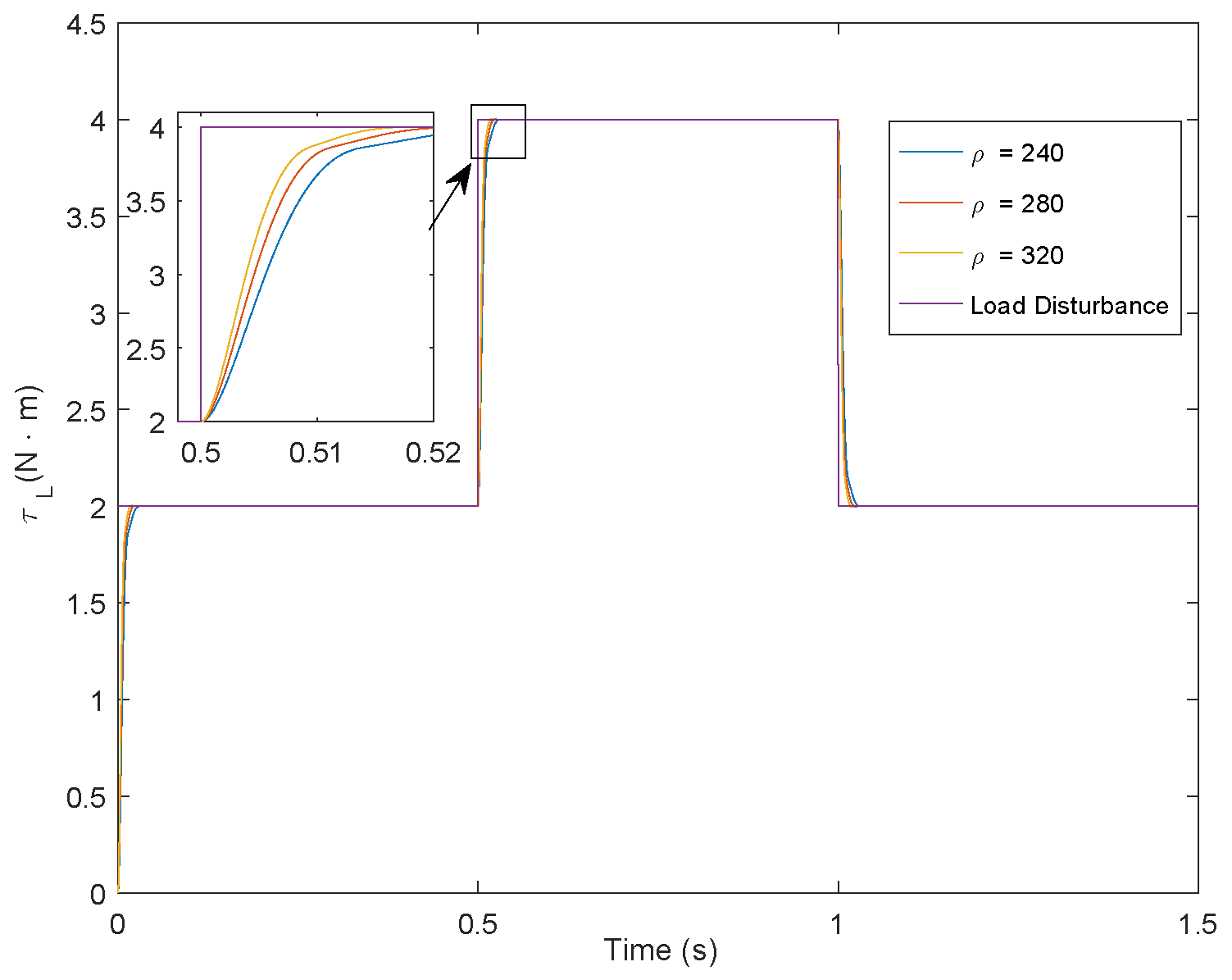
4. The Design of Extended-State Observer
5. Simulation and Experimental Results
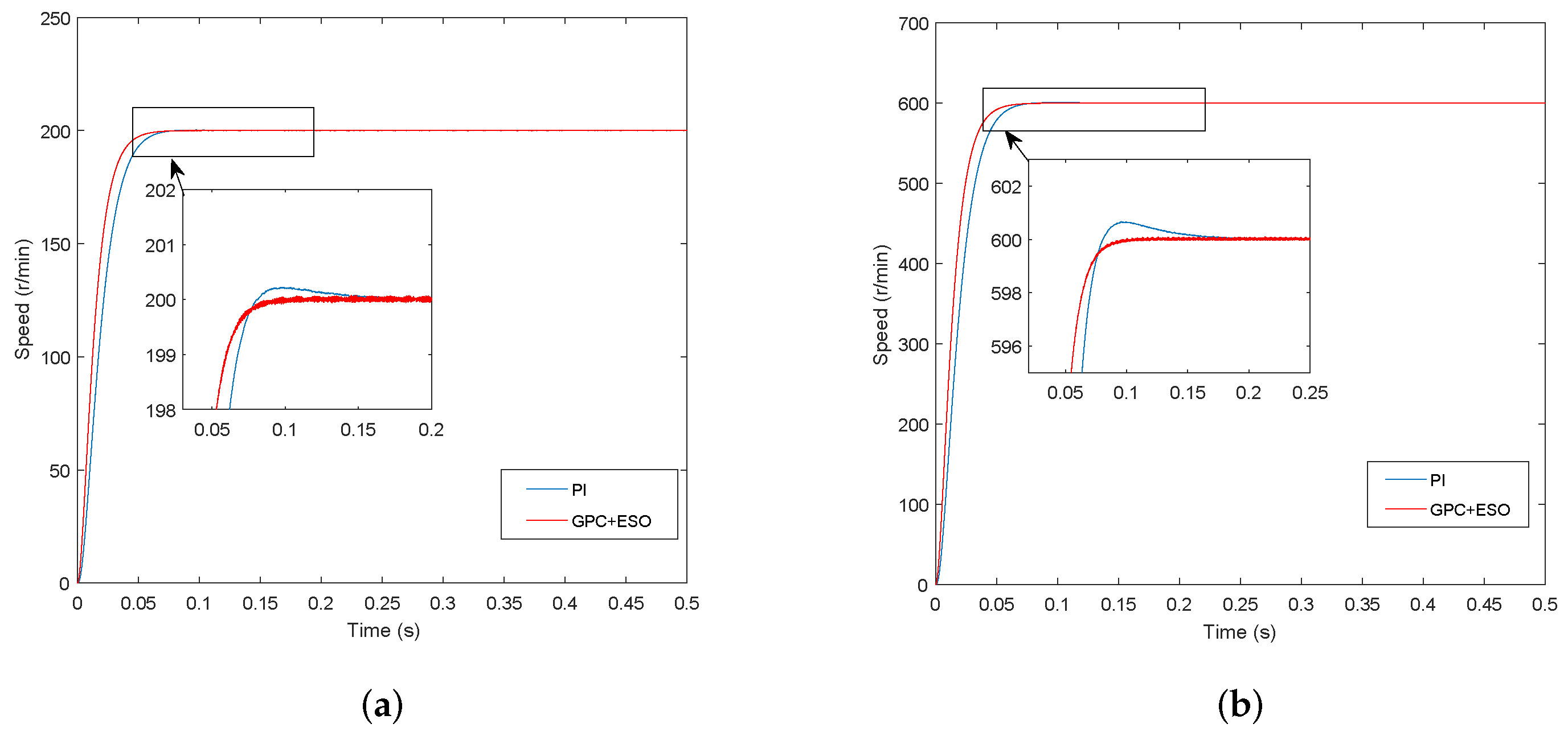
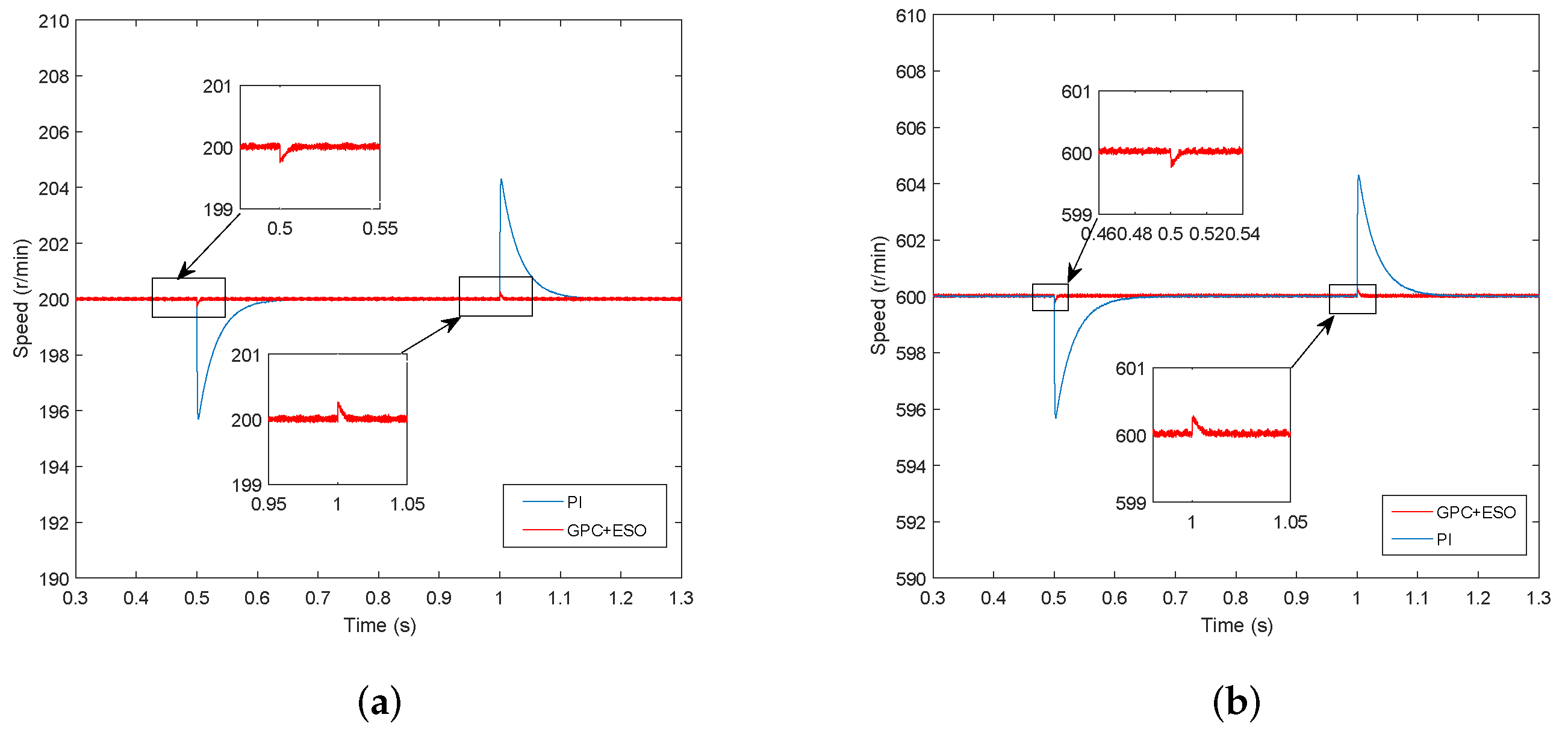
5.1. Simulation Results
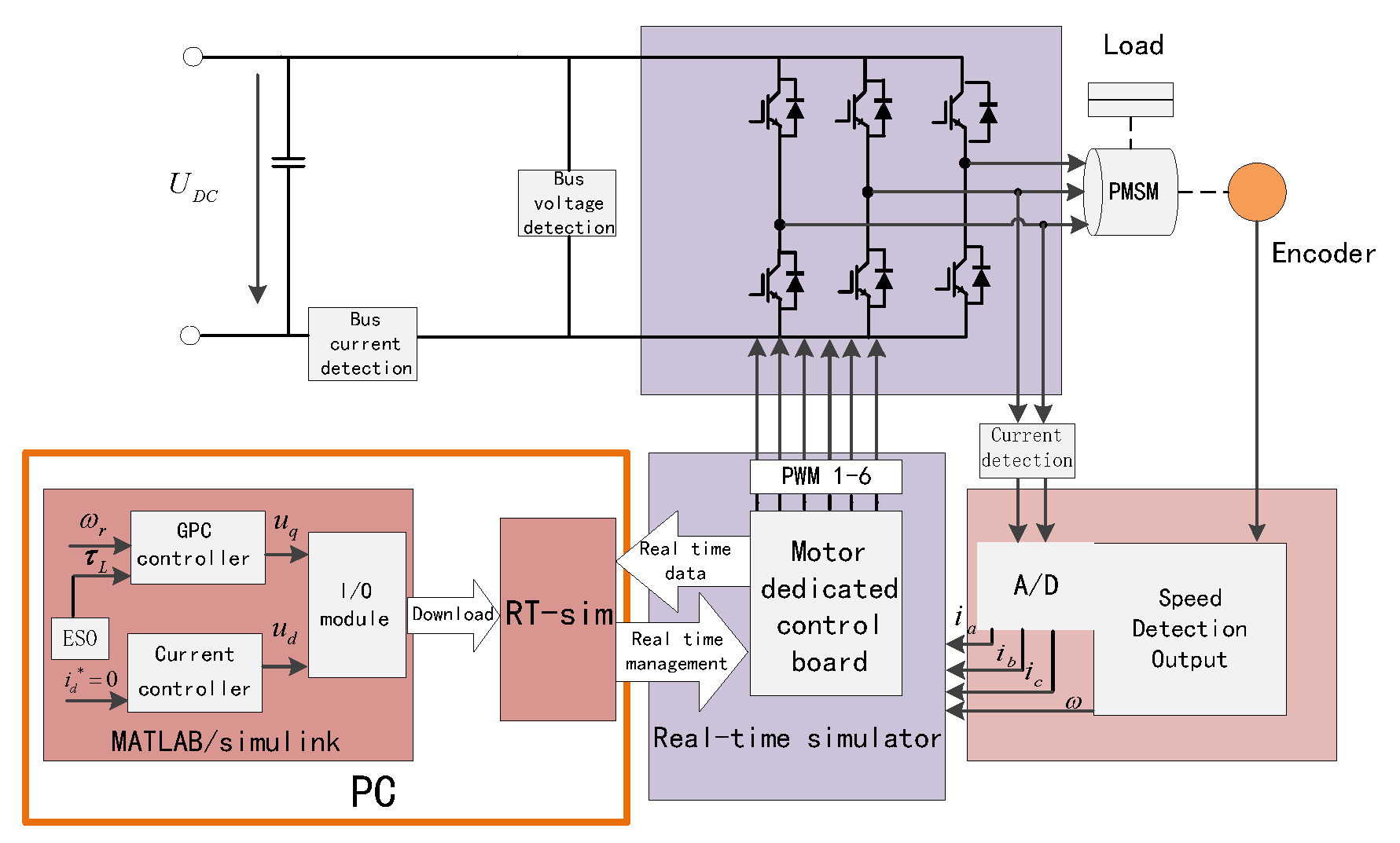
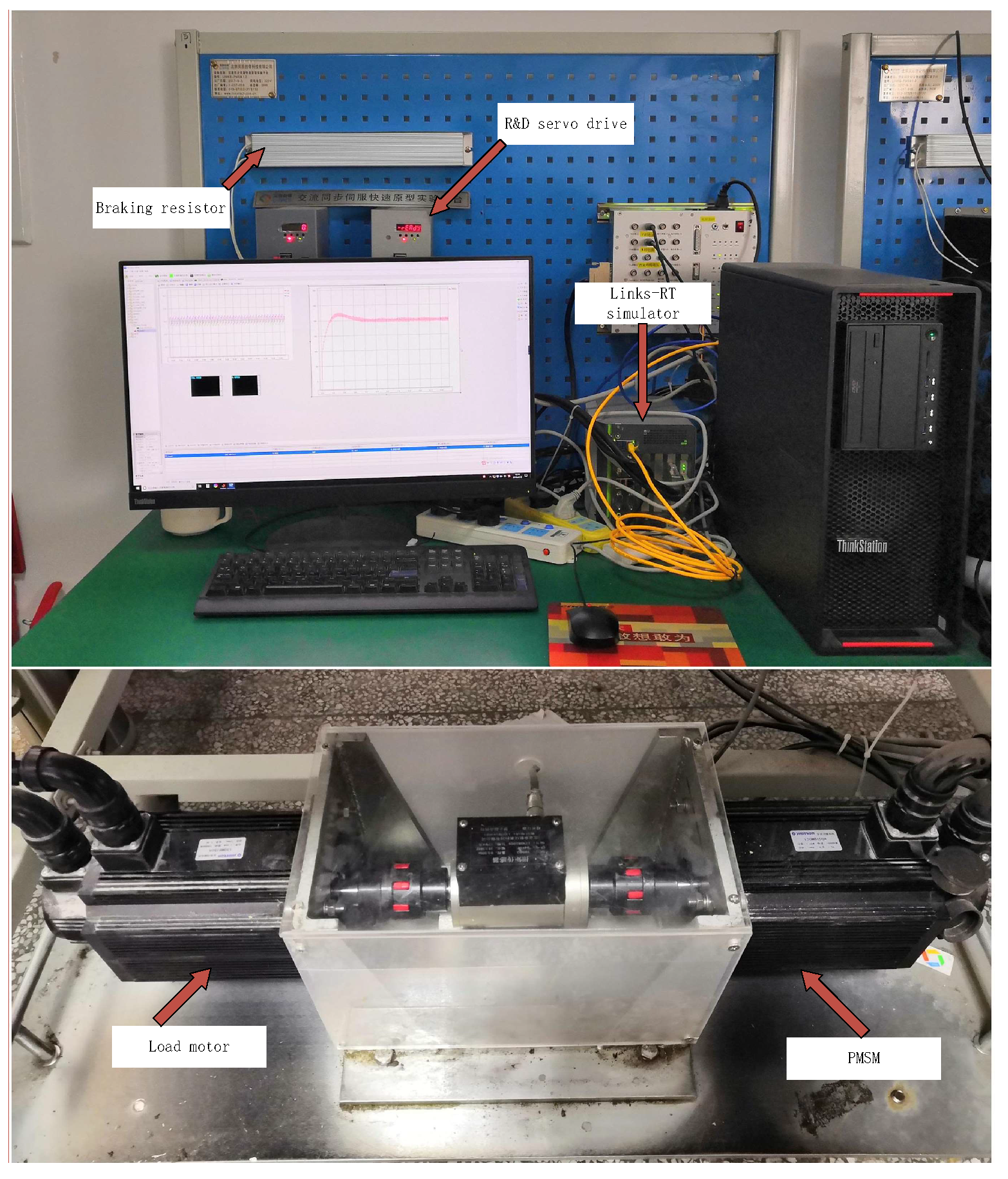
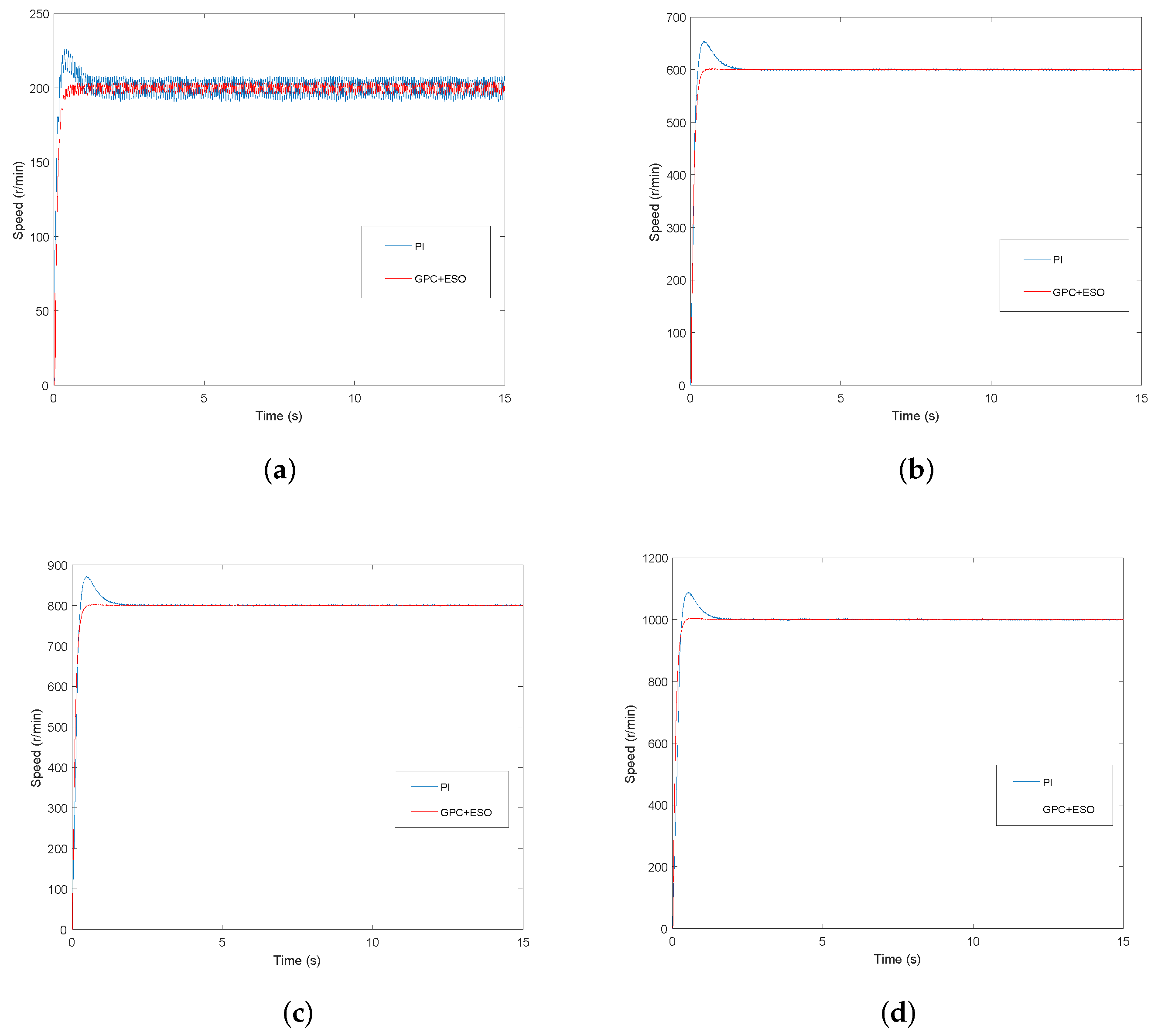
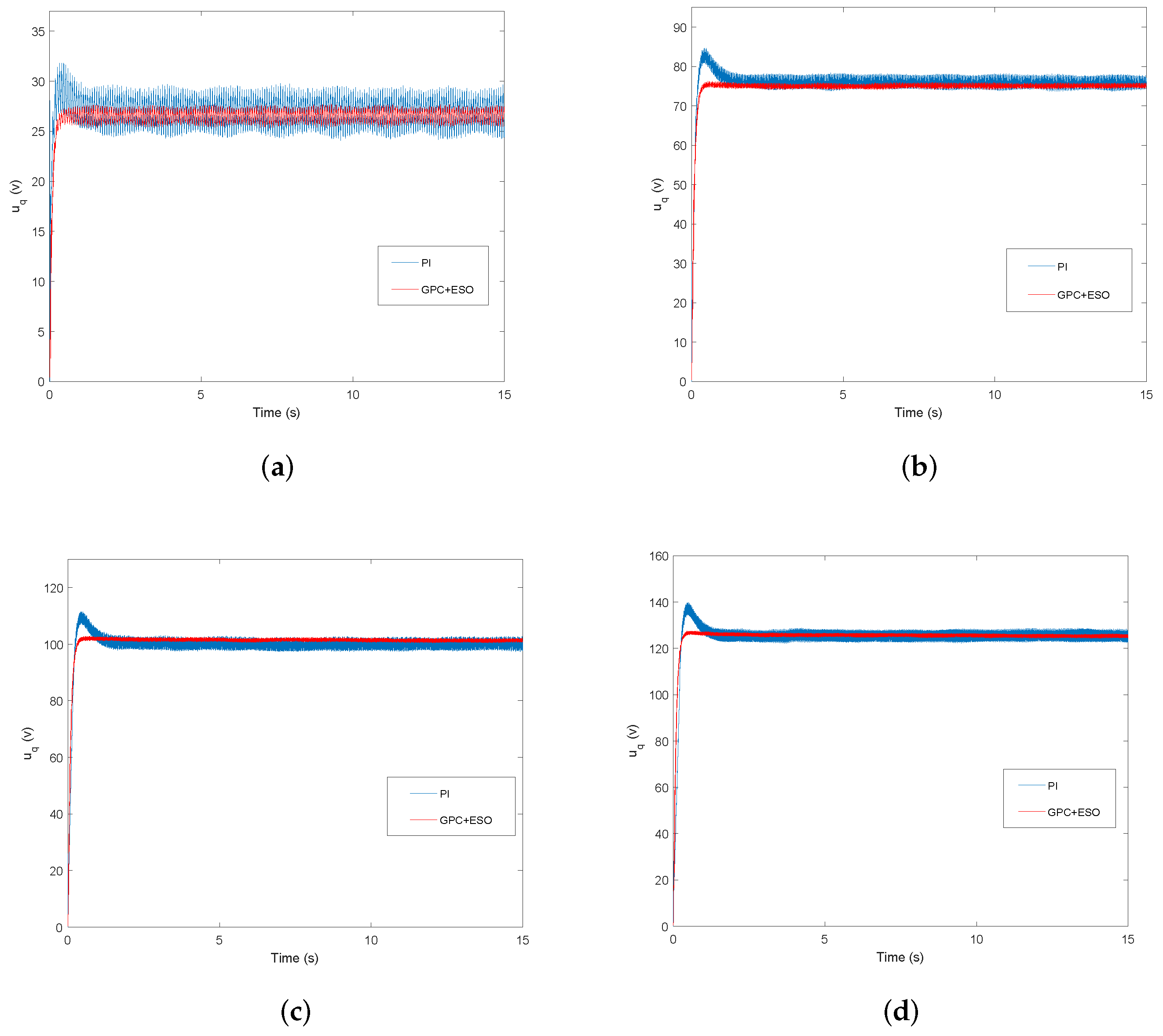
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Aghili, F. Optimal Feedback linearization control of interior PM synchronous motors subject to time-varying operation conditions minimizing power loss. IEEE Trans. Ind. Electron. 2018, 65, 5414–5421. [Google Scholar] [CrossRef]
- Hu, J.; Qiu, Y.; Lu, H. Adaptive robust nonlinear feedback control of chaos in PMSM system with modeling uncertainty. Appl. Math. Model. 2016, 40, 8265–8275. [Google Scholar] [CrossRef]
- Chen, J.; Yao, W.; Ren, Y.; Wang, R.; Zhang, L.; Jiang, L. Nonlinear adaptive speed control of a permanent magnet synchronous motor: A perturbation estimation approach. Automatica 2017, 76, 143–152. [Google Scholar] [CrossRef]
- Qian, J.; Ji, C.; Pan, N.; Wu, J. Improved sliding mode control for permanent magnet synchronous motor speed regulation system. Appl. Sci. 2018, 8, 2491. [Google Scholar] [CrossRef]
- Liu, X.; Yu, H.; Yu, J.; Zhao, L. Combined Speed and Current Terminal Sliding Mode Control With Nonlinear Disturbance Observer for PMSM Drive. IEEE Access 2018, 6, 29594–29601. [Google Scholar] [CrossRef]
- Ouledali, O.; Meroufel, A.; Bentouba, S. Direct torque fuzzy control of PMSM based on SVM. IEEE Trans. Ind. Electron. 2015, 74, 1314–1322. [Google Scholar] [CrossRef]
- Yu, J.; Chen, B.; Yu, H.; Zhao, L.; Lin, C. Neural networks-based command filtering control of nonlinear systems with uncertain disturbance. Inf. Sci. 2018, 426, 50–60. [Google Scholar] [CrossRef]
- Wangm, M.S.; Tsai, T.M. Sliding mode and neural network control of sensorless PMSM controlled system for power consumption and performance improvement. Energies 2017, 10, 1780. [Google Scholar] [CrossRef]
- Sun, T.; Pan, Y.; Zhang, J.; Yu, H. Robust model predictive control for constrained continuous-time nonlinear systems. Int. J. Control 2018, 91, 1–16. [Google Scholar] [CrossRef]
- Chai, S.; Wang, L.; Rogers, E. A cascade MPC control structure for a PMSM with speed ripple minimization. IEEE Trans. Ind. Electron. 2013, 60, 2978–2987. [Google Scholar] [CrossRef]
- Bolognani, S.; Bolognani, S.; Peretti, L.; Zigliotto, M. Design and Implementation of Model Predictive Control for Electrical Motor Drives. IEEE Trans. Ind. Electron. 2009, 56, 1925–1936. [Google Scholar] [CrossRef]
- Errouissi, R.; Ouhrouche, M.; Benzaioua, A. Robust nonlinear predictive controller for multivariable nonlinear systems with different relative degree. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, ON, Canada, 6–9 July 2010; pp. 1231–1237. [Google Scholar]
- Chen, W.; Ballance, D.; Gawthrop, P. Optimal control of nonlinear systems: A predictive control approach. Automatica 2003, 39, 633–641. [Google Scholar] [CrossRef]
- Errouissi, R.; Ouhrouche, M. Nonlinear predictive controller for a permanent magnet synchronous motor drive. Math. Comput. Simul. 2010, 81, 394–406. [Google Scholar] [CrossRef]
- Errouissi, R.; Ouhrouche, M. Robust Cascaded Nonlinear Predictive Control of a Permanent Magnet Synchronous Motor With Antiwindup Compensator. IEEE Trans. Ind. Electron. 2012, 59, 3078–3088. [Google Scholar] [CrossRef]
- Chakrabarty, A.; Corless, M.; Buzzard, G.T.; Żak, S.H.; Rundell, A.E. State and unknown input observers for nonlinear systems with bounded exogenous inputs. IEEE Trans. Autom. Control 2017, 62, 5497–5510. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Ohnishi, K. Stability and robustness of disturbance-observer-based motion control systems. IEEE Trans. Ind. Electron. 2015, 62, 414–422. [Google Scholar] [CrossRef]
- Deng, Y.; Wang, J.; Li, H.; Liu, J.; Tian, D. Adaptive sliding mode current control with sliding mode disturbance observer for PMSM drives. ISA Trans. 2019, 88, 113–126. [Google Scholar] [CrossRef] [PubMed]
- Qian, J.; Xiong, A.; Ma, W. Extended state observer-based sliding mode control with new reaching law for PMSM speed control. Math. Probl. Eng. 2016, 2016, 1–10. [Google Scholar] [CrossRef]
- Gonzalez, A.; Balaguer, V.; Garcia, P.; Cuenca, A. Gain-scheduled predictive extended state observer for time-varying delays systems with mismatched disturbances. ISA Trans. 2018, 84, 206–213. [Google Scholar] [CrossRef] [PubMed]
- Xiong, S.; Wang, W.; Liu, X.; Chen, Z.; Wang, S. A novel extended state observer. ISA Trans. 2015, 58, 309–317. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Unit |
|---|---|---|
| rated speed | 1000 | r/min |
| rated torque | 14.5 | N·m |
| stator resistance | 1.84 | |
| d-axis inductance | 6.65 | mH |
| q-axis inductance | 6.65 | mH |
| rotor flux | 0.32 | Wb |
| moment of inertia | 0.0027 | Kg·m |
| Control Methods | PI | GPC+ESO | PI | GPC+ESO | PI | GPC+ESO |
|---|---|---|---|---|---|---|
| r/min | r/min | r/min | ||||
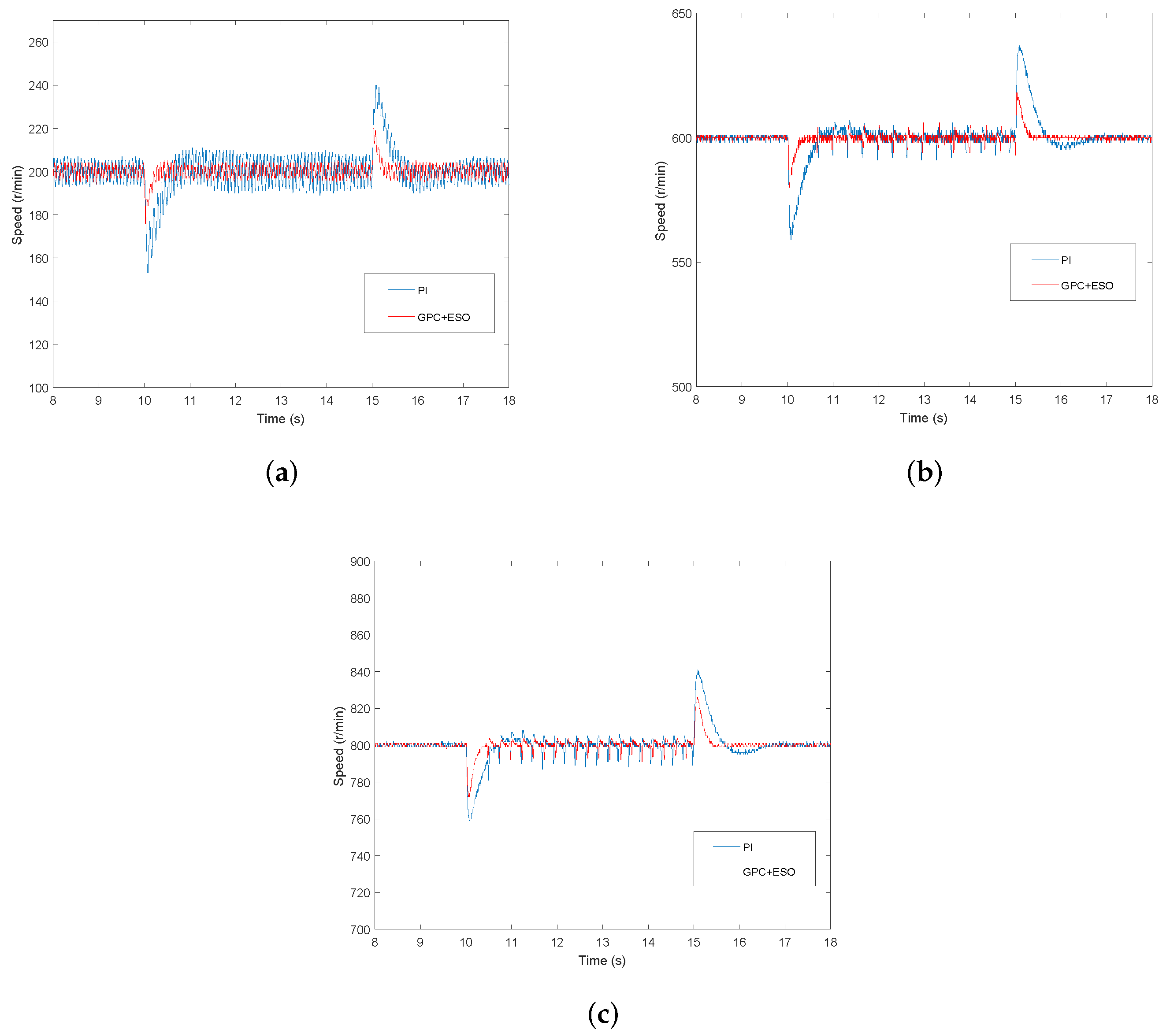
| Speed fluctuation when a sudden load is added (r·min) | −43 | −24 | −39 | −20 | −39 | −29 |
| Speed fluctuation when a sudden load is removed (r·min) | +40 | +20 | +34 | +18 | +38 | +26 |
| speed adjustment time when a sudden load is added (s) | 1 | 0.3 | 1.5 | 0.4 | 1.7 | 0.4 |
| speed adjustment time when a sudden load is removed (s) | 1.3 | 0.5 | 1.8 | 0.6 | 1.8 | 0.45 |
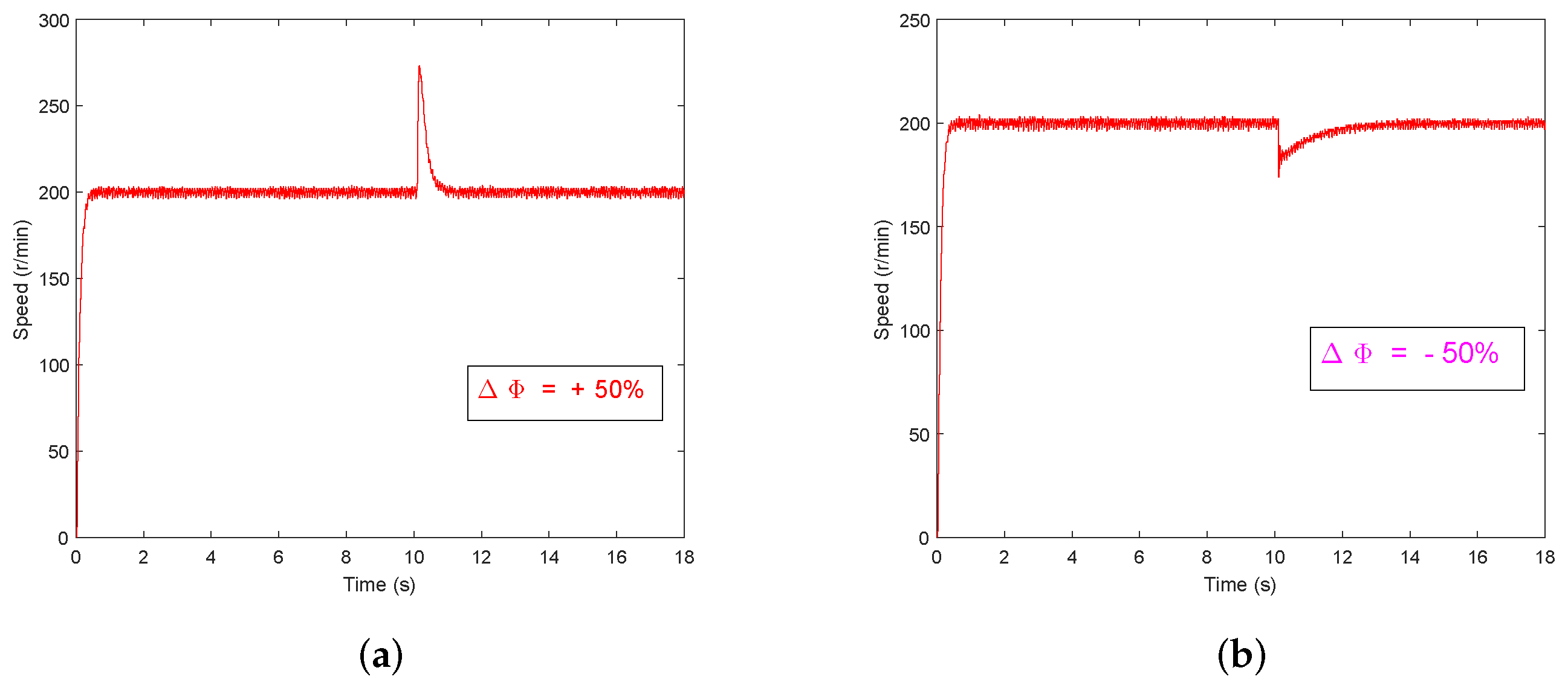
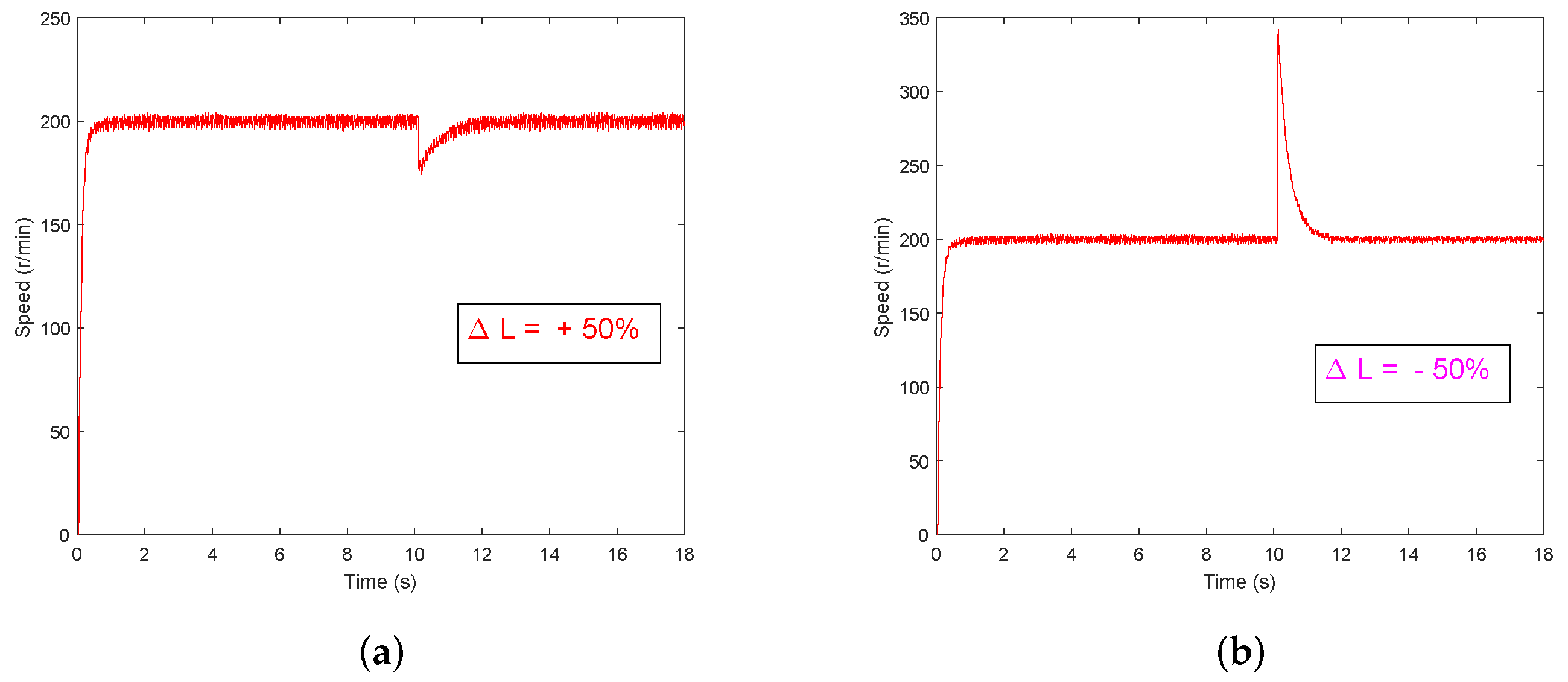
| Speed fluctuation (r/min) | +74 | −26 | −25 | +143 |
| speed adjustment time (s) | 1 | 3.8 | 2 | 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Liu, X.; Zhang, Q. Predictive Speed-Control Algorithm Based on a Novel Extended-State Observer for PMSM Drives. Appl. Sci. 2019, 9, 2575. https://doi.org/10.3390/app9122575
Zhao Y, Liu X, Zhang Q. Predictive Speed-Control Algorithm Based on a Novel Extended-State Observer for PMSM Drives. Applied Sciences. 2019; 9(12):2575. https://doi.org/10.3390/app9122575
Chicago/Turabian StyleZhao, Yang, Xudong Liu, and Qi Zhang. 2019. "Predictive Speed-Control Algorithm Based on a Novel Extended-State Observer for PMSM Drives" Applied Sciences 9, no. 12: 2575. https://doi.org/10.3390/app9122575
APA StyleZhao, Y., Liu, X., & Zhang, Q. (2019). Predictive Speed-Control Algorithm Based on a Novel Extended-State Observer for PMSM Drives. Applied Sciences, 9(12), 2575. https://doi.org/10.3390/app9122575