Improved Altitude Control Algorithm for Quadcopter Unmanned Aerial Vehicles


Abstract
1. Introduction
1.1. Related Works
1.2. Main Contributions
1.3. Organization
2. Preliminaries
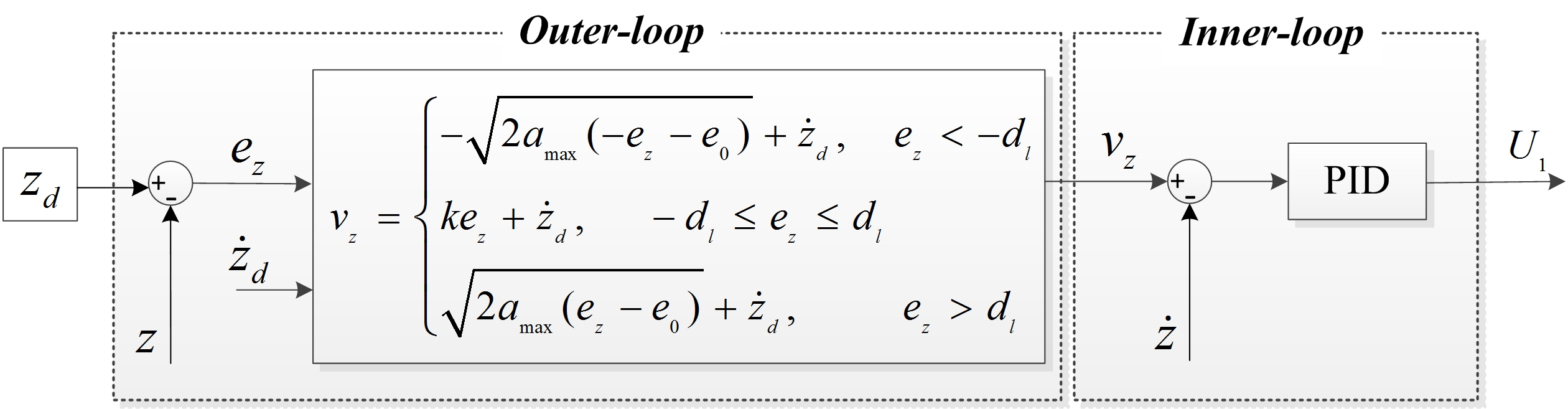
2.1. Quadcopter Dynamics Model
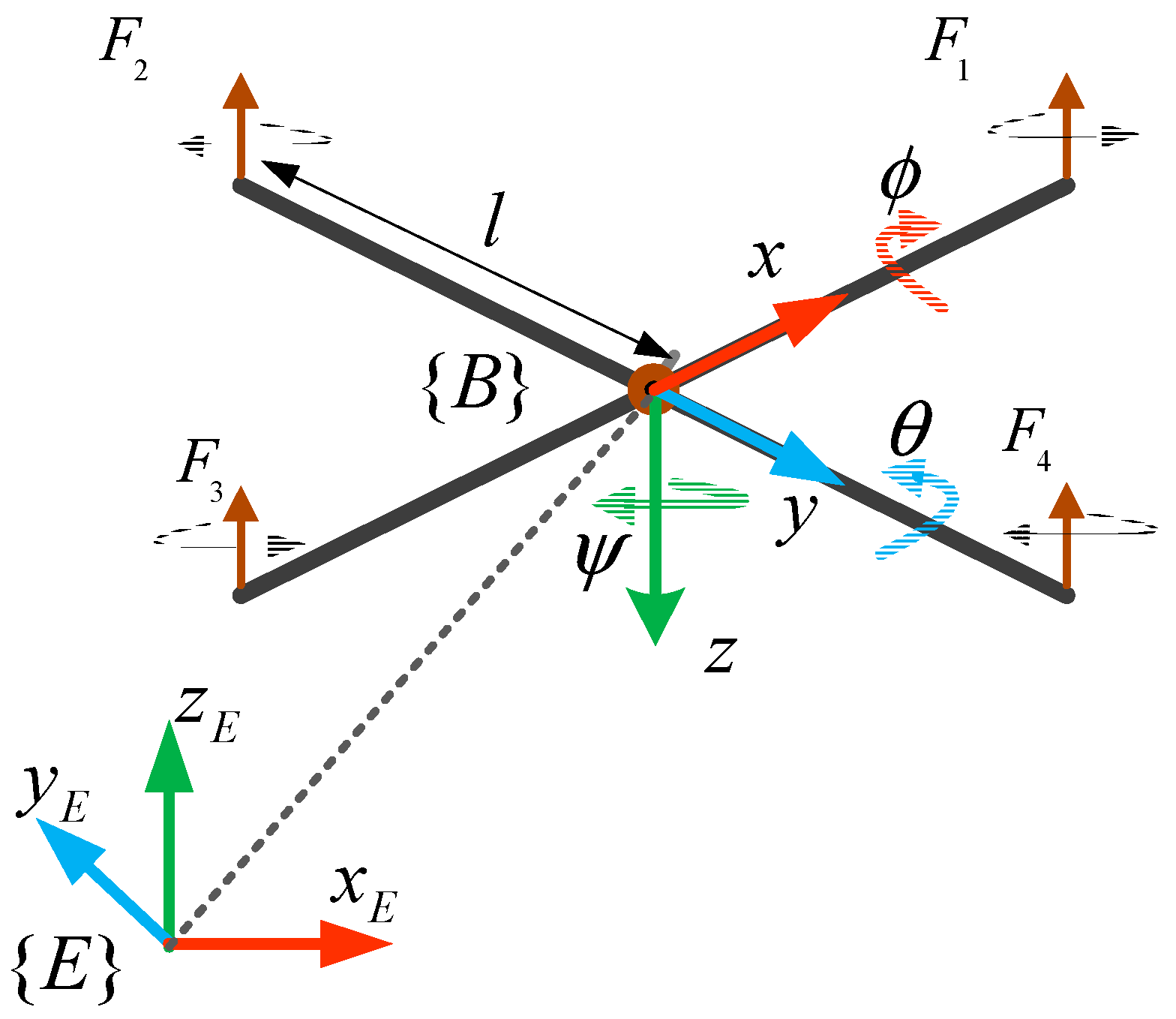
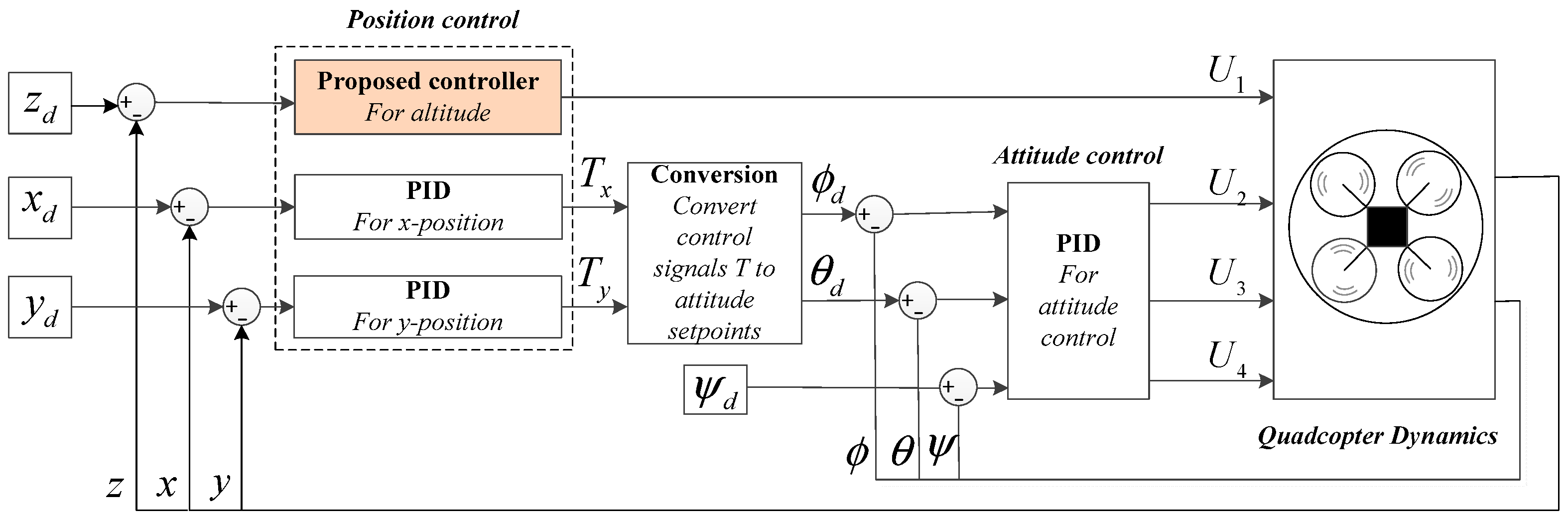
2.2. Quadcopter Control Scheme
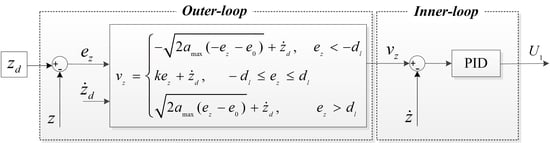
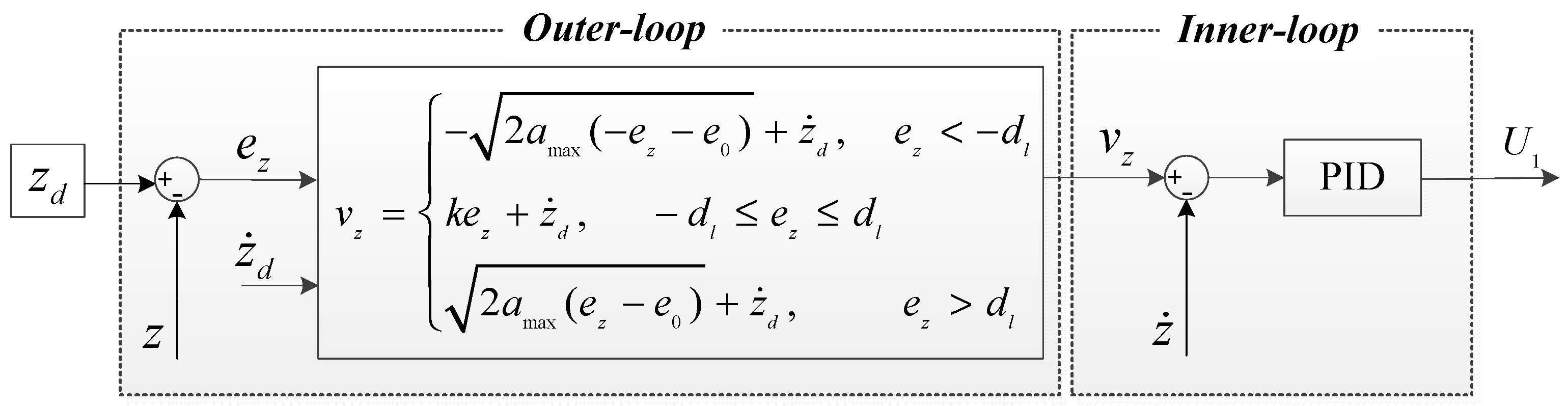
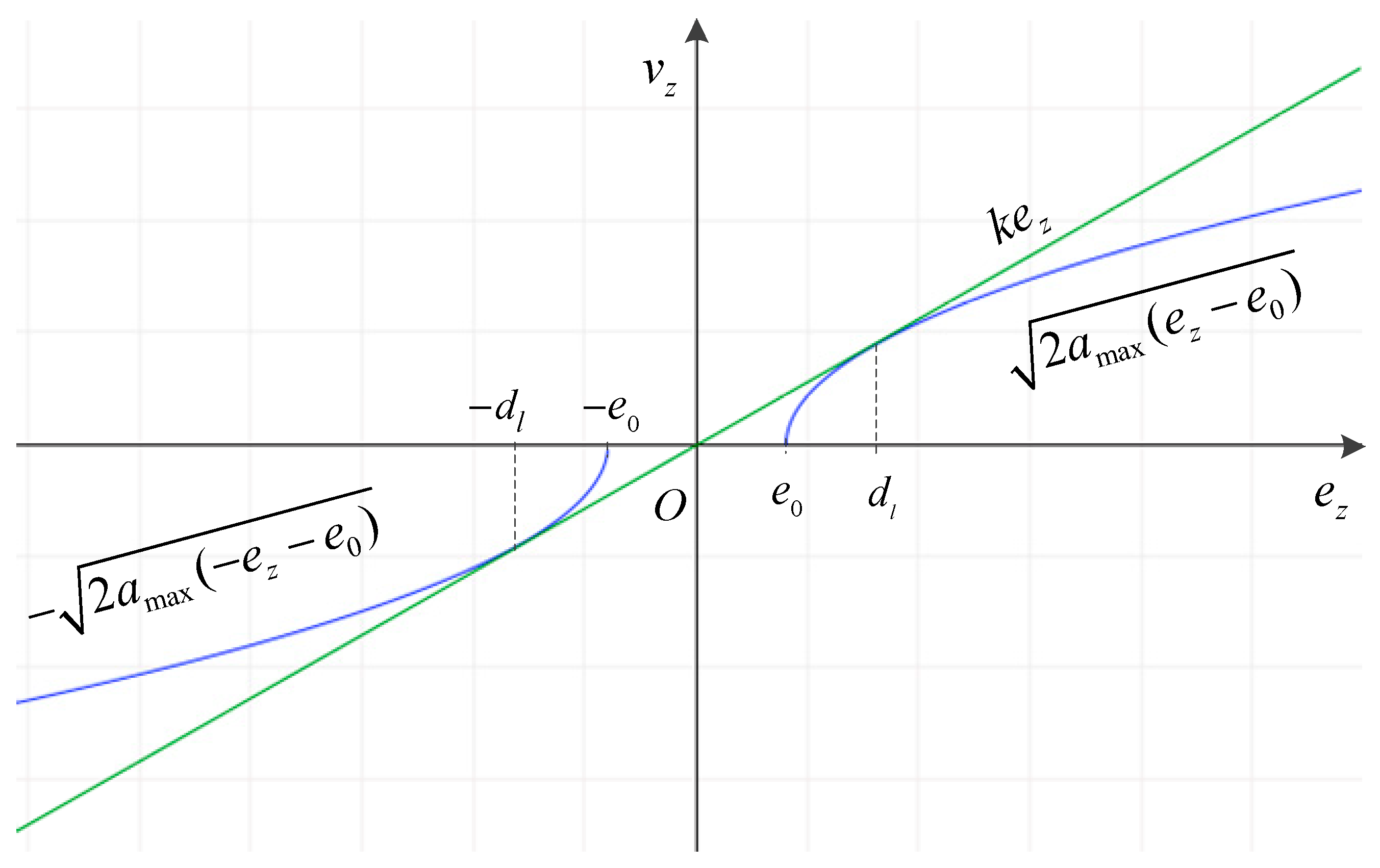
3. Controller Design
4. Numerical Simulation, Experimental Results and Discussions
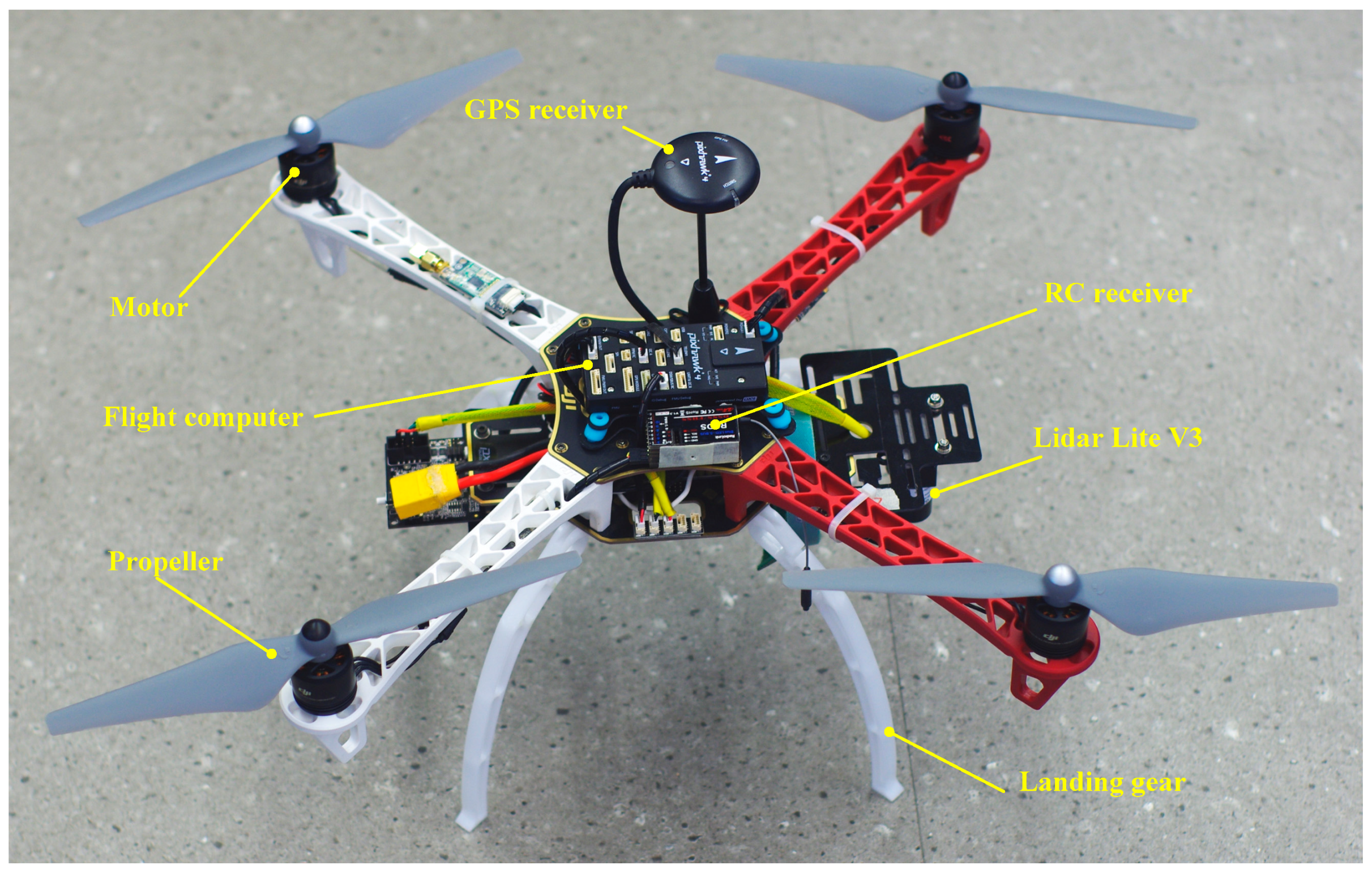
4.1. Experimental Platform Description
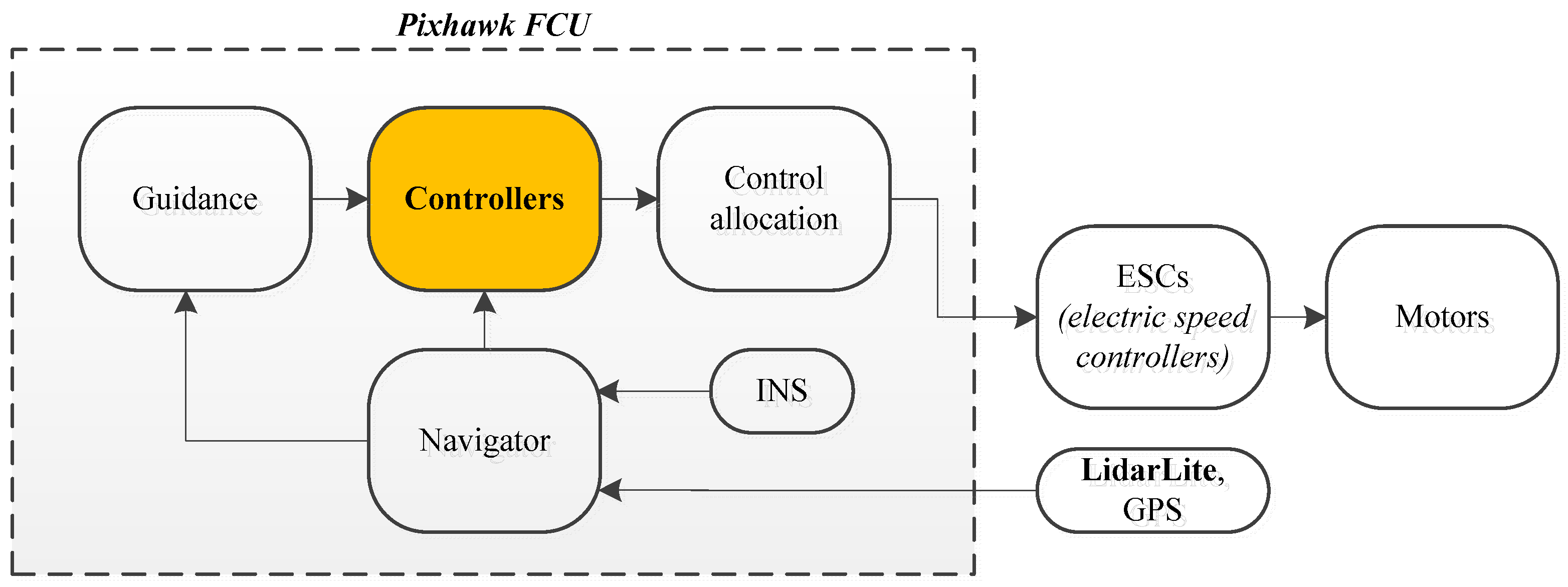
4.1.1. Hardware and Avionics Devices
4.1.2. Software
4.2. Numerical Simulation and Discussions
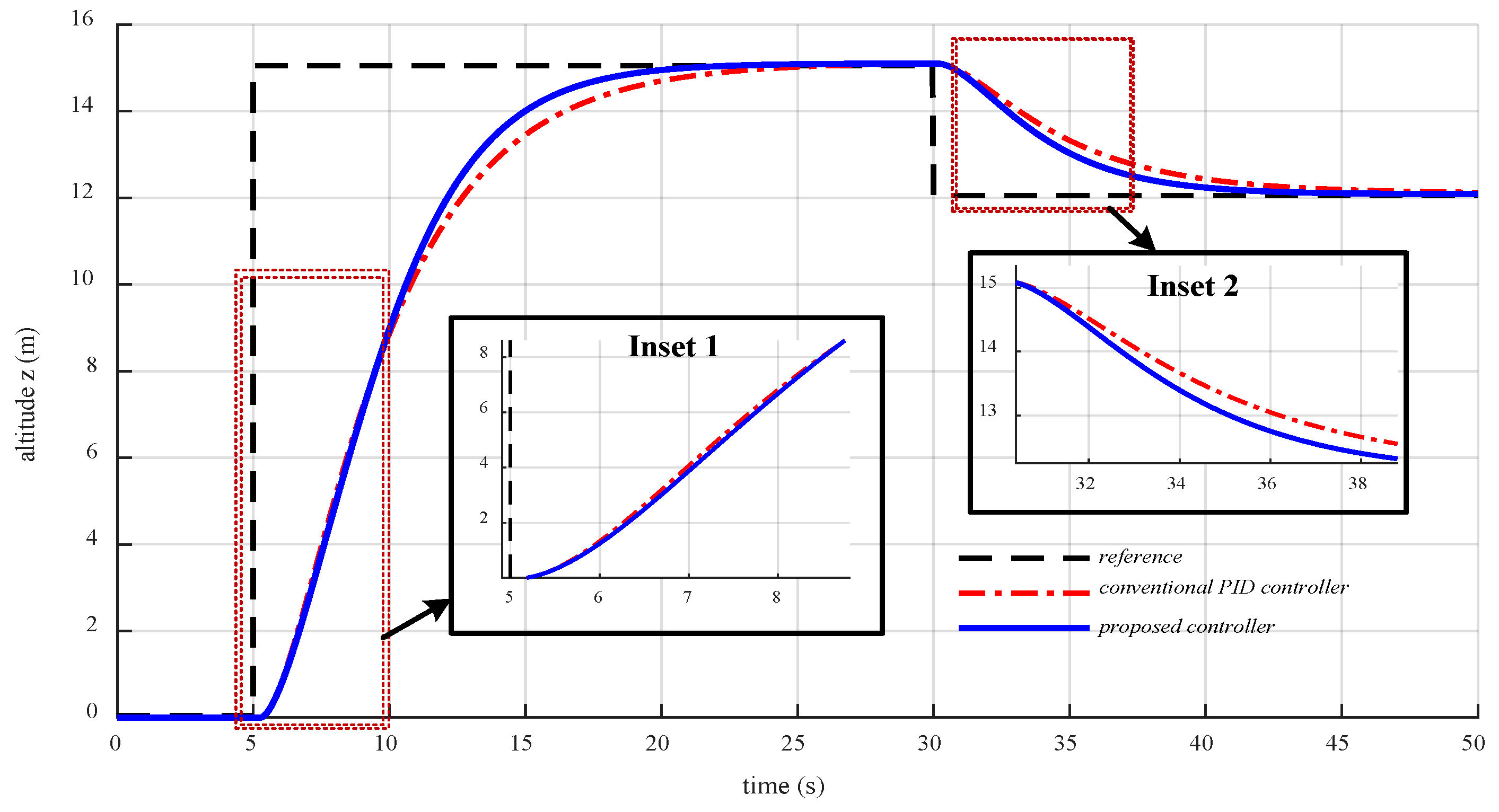
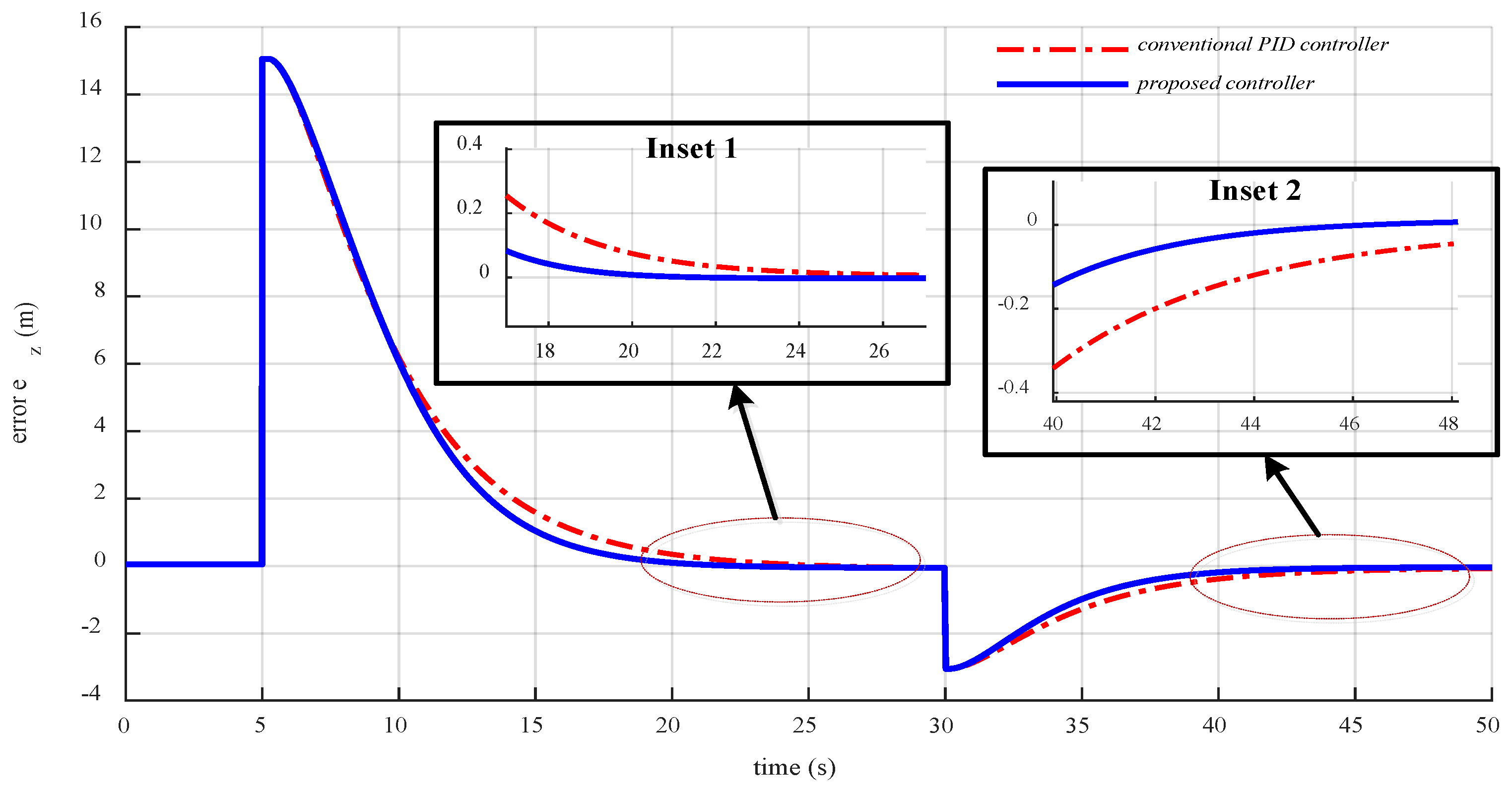
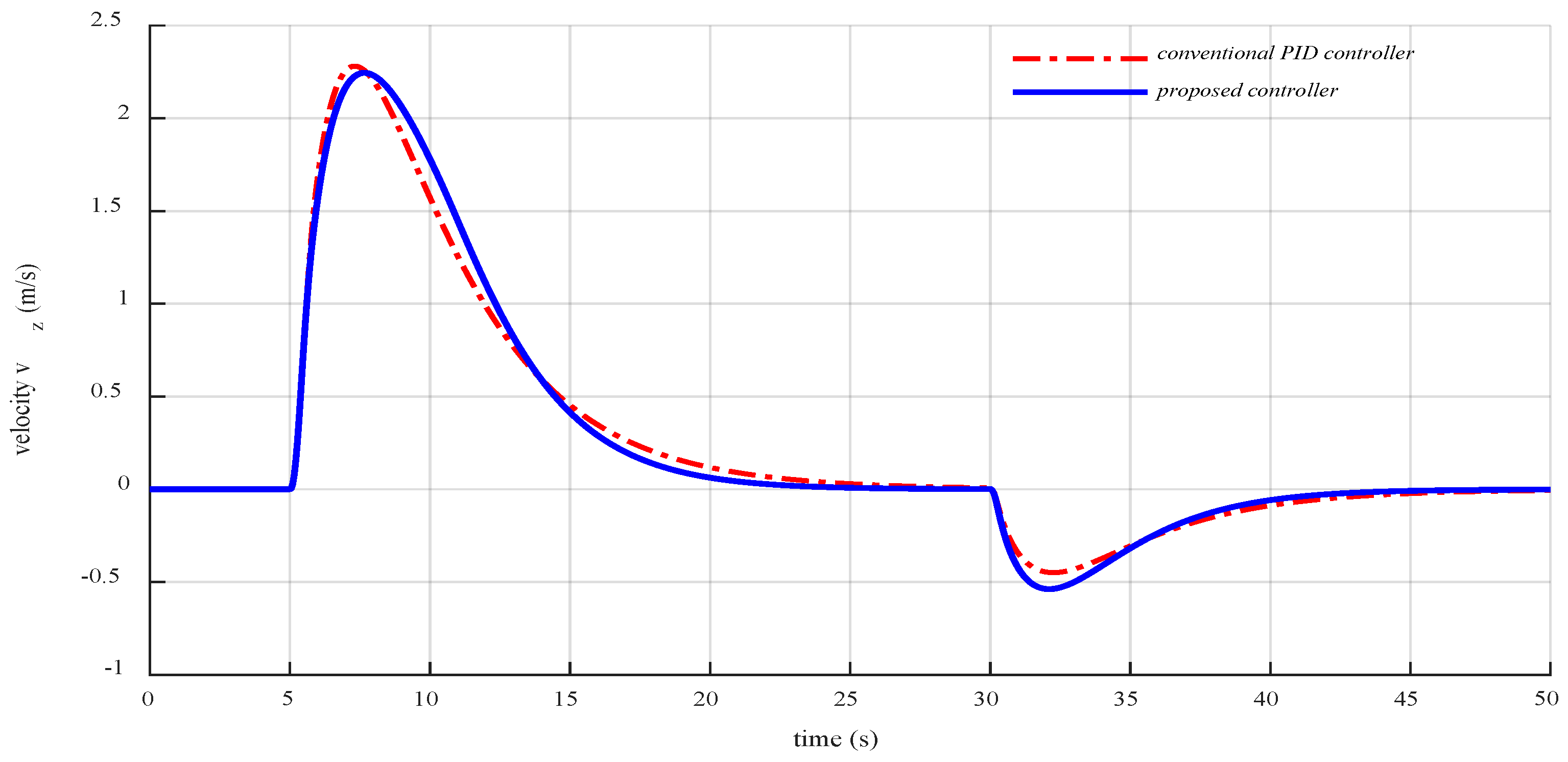
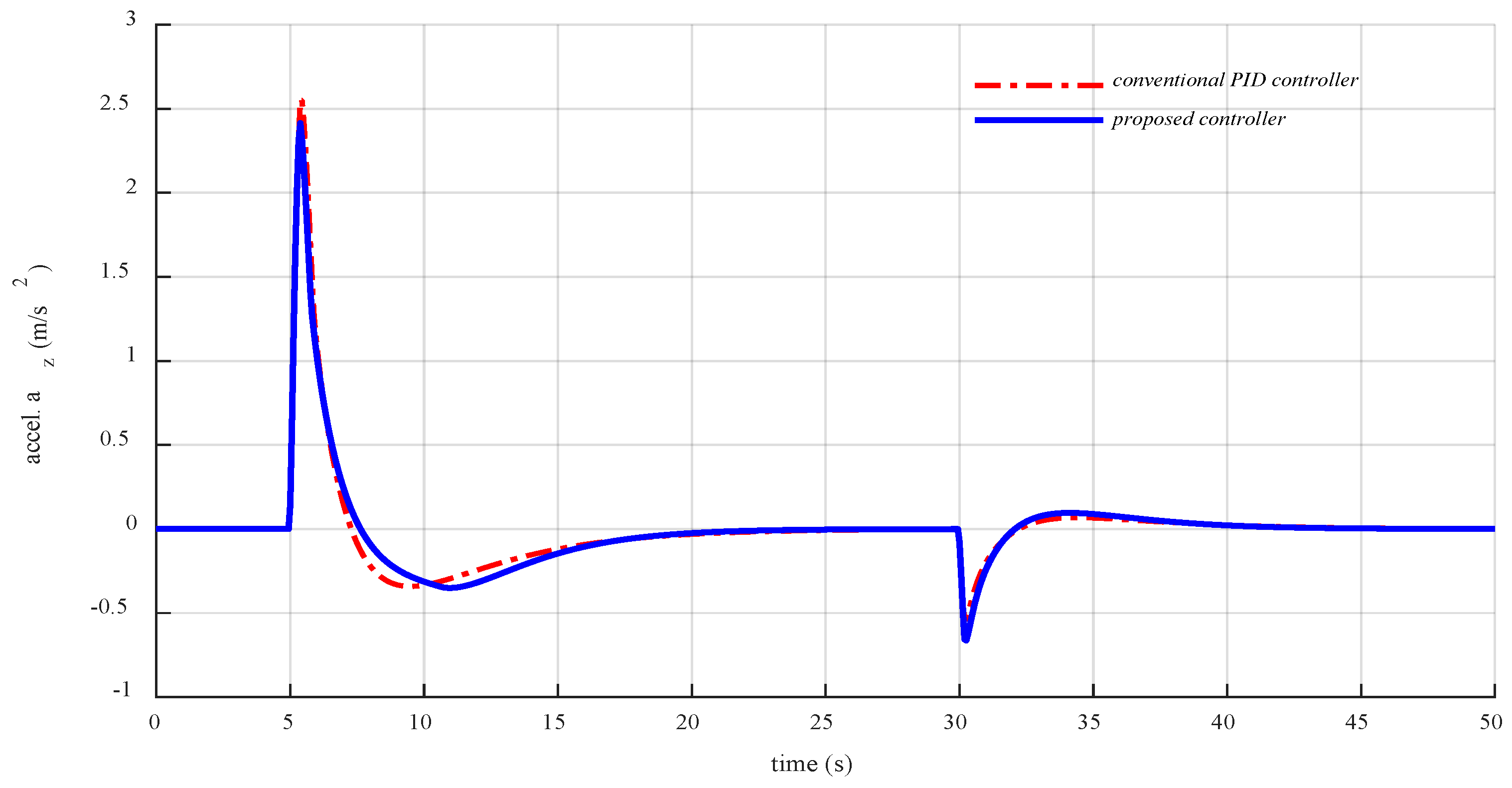
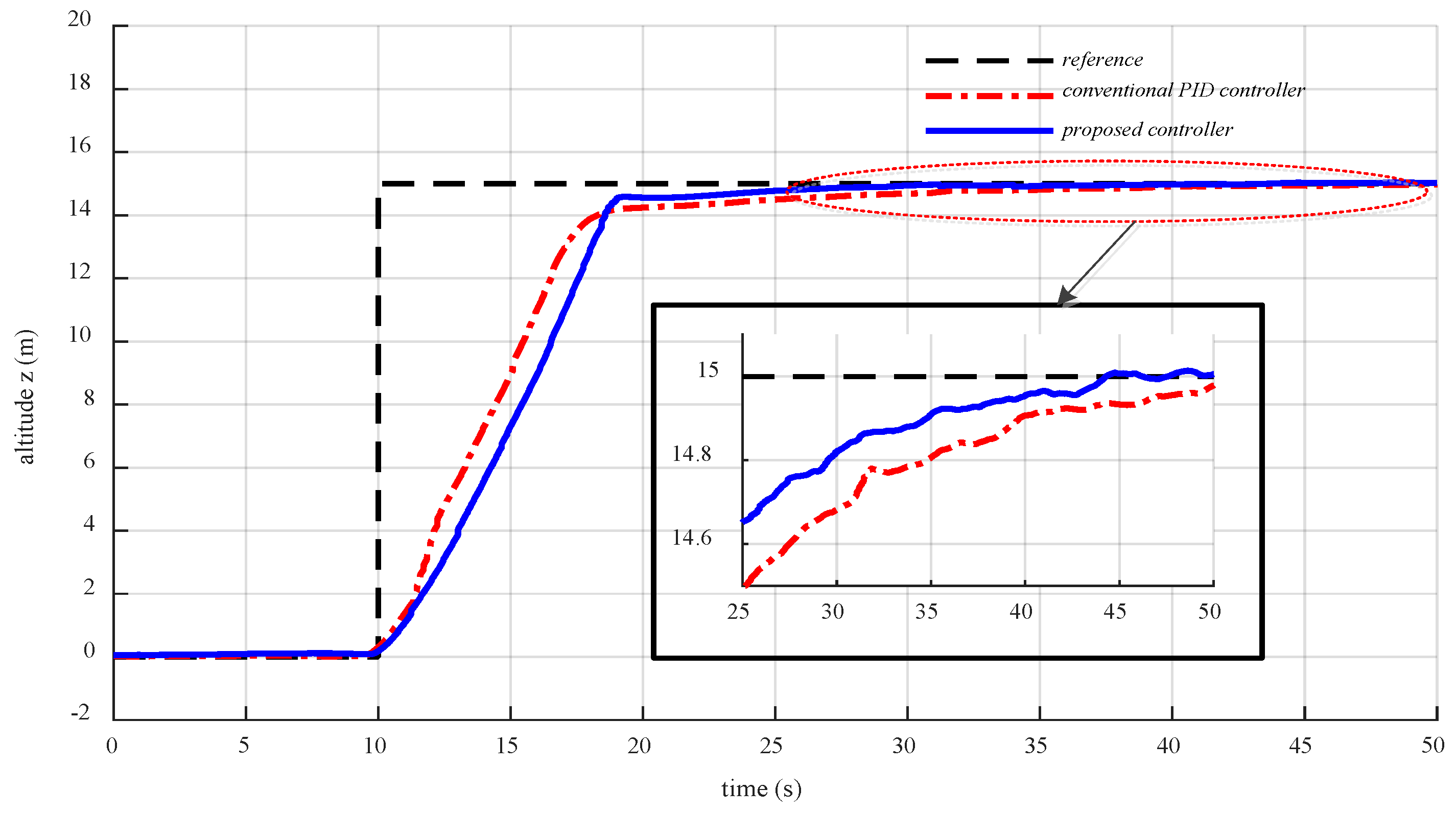
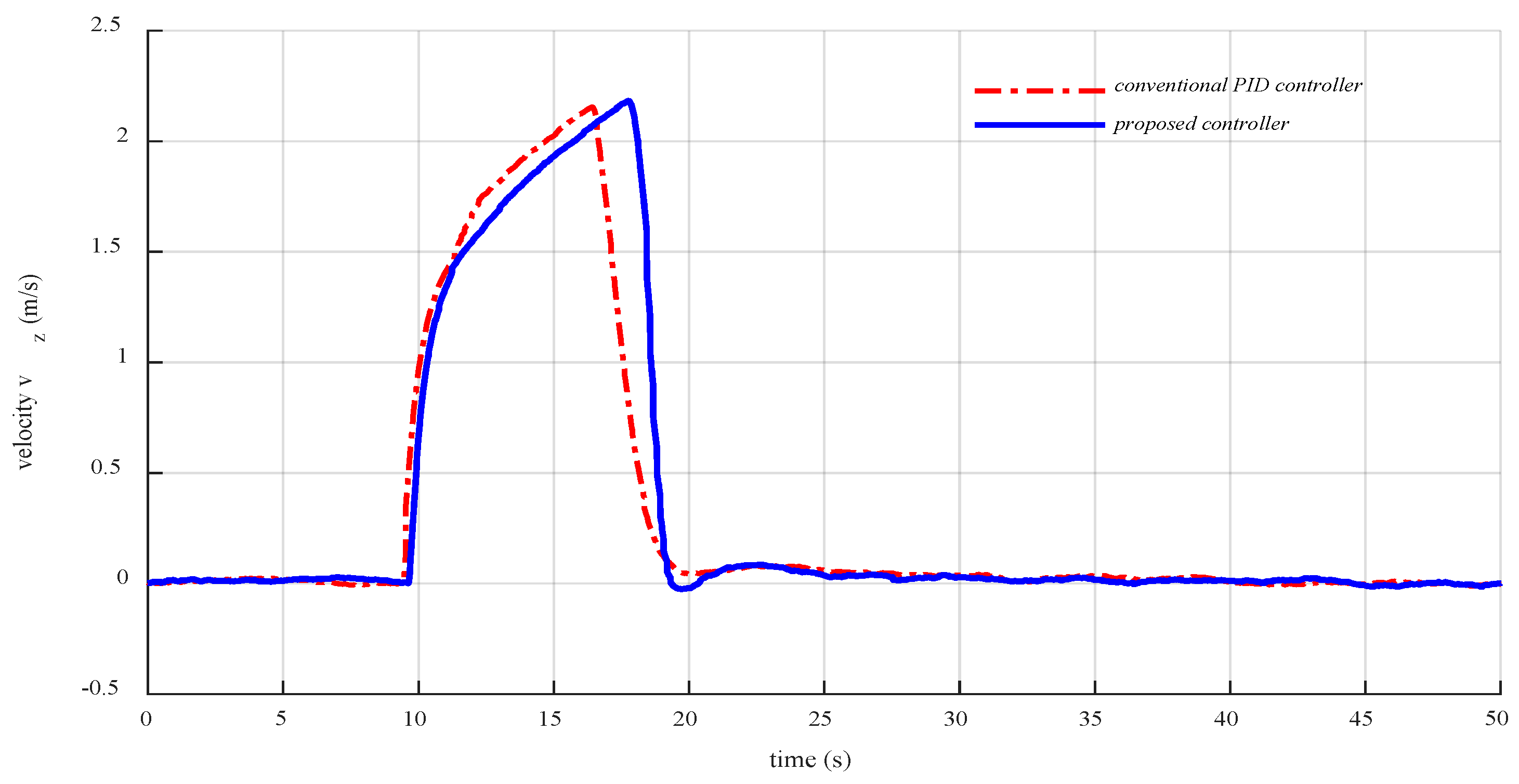
4.2.1. Scenario 1: Tracking Step Altitude References
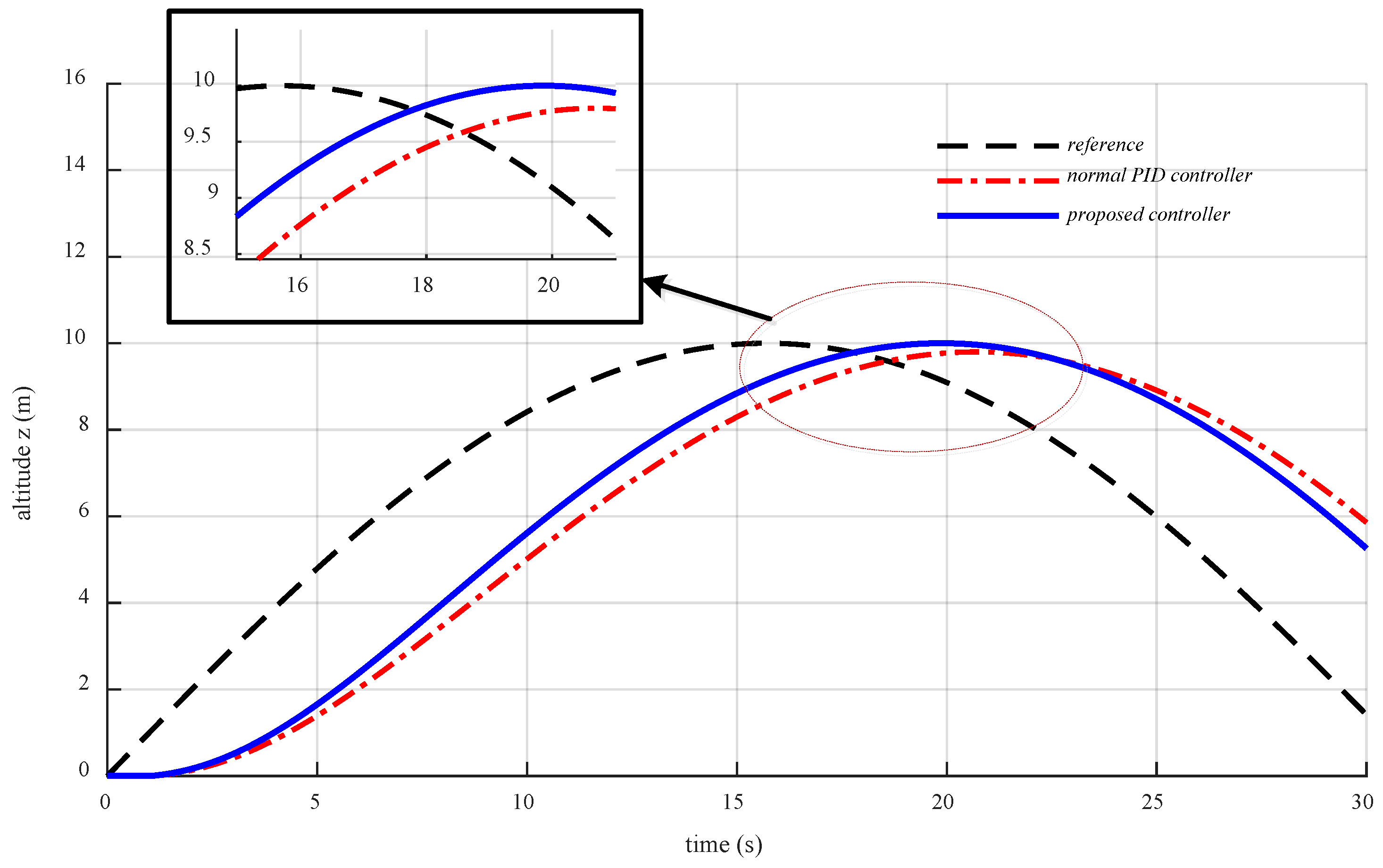
4.2.2. Scenario 2: Tracking a Moving Altitude Reference
4.3. Experimental Demonstration and Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xuan-Mung, N.; Hong, S.K. A Multicopter ground testbed for the evaluation of attitude and position controller. Int. J. Eng. Technol. 2018, 7, 65–73. [Google Scholar] [CrossRef]
- Yu, Y.; Ding, X. A Quadrotor test bench for six degree of freedom flight. J. Intell. Robot. Syst. 2012, 68, 323–338. [Google Scholar] [CrossRef]
- Lee, K.U.; Choi, Y.H.; Park, J.B. Inverse optimal design for position control of a quadrotor. Appl. Sci. 2017, 7, 907. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Hong, S.K. Sliding mode thau observer for actuator fault diagnosis of quadcopter UAVs. Appl. Sci. 2018, 8, 1893. [Google Scholar] [CrossRef]
- Du, H.; Zhu, W.; Wen, G.; Duan, Z.; Lu, J. Distributed formation control of multiple quadrotor aircraft based on nonsmooth consensus algorithms. IEEE Trans. Cybern. 2017, 49, 342–353. [Google Scholar] [CrossRef]
- Borowczyk, A.; Nguyen, D.T.; Nguyen, A.P.V.; Nguyen, D.Q.; Saussié, D.; Ny, J.L. Autonomous landing of a multirotor micro air vehicle on a high velocity ground vehicle. IFAC Pap. Online 2017, 50, 10488–10494. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M. Autonomous landing of a quadrotor on a moving platform. IEEE Trans. Aerosp. Electr. Syst. 2017, 53, 1504–1509. [Google Scholar] [CrossRef]
- Wang, L.; Bai, X. Quadrotor autonomous approaching and landing on a vessel deck. J. Intel. Robot. Syst. 2018, 125–143. [Google Scholar] [CrossRef]
- Croon, G.C.H.E.; Ho, H.W.; Wagter, C.; Kampen, E.; Remes, B.; Chu, Q.P. Optic-flow based slope estimation for autonomous landing. Int. J. Micro Air Veh. 2013, 5. [Google Scholar] [CrossRef]
- Junaid, A.B.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N. Autonomous wireless self-charging for multi-rotor unmanned aerial vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Hu, B.; Lu, L.; Mishra, S. Fast, safe and precise landing of a quadrotor on an oscillating platform. In Proceedings of the American Control Conference, Palmer House Hilton, Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Faust, A.; Palunko, I.; Cruz, P.; Fierro, R.; Tapia, L. Automated aerial suspended cargo delivery through reinforcement learning. Artif. Intell. 2017, 247, 381–398. [Google Scholar] [CrossRef]
- Mathew, N.; Smith, S.L.; Waslander, S.L. Planning paths for package delivery in heterogeneous multirobot teams. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1298–1308. [Google Scholar] [CrossRef]
- Arbanas, B.; Ivanovic, A.; Car, M.; Haus, T.; Orsag, M.; Petrovic, T.; Bogdan, S. Aerial-ground robotic system for autonomous delivery tasks. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Santos, M.C.P.; Rosales, C.D.; Sarapura, J.A.; Sarcinelli-Filho, M.; Carelli, R. An adaptive dynamic controller for quadrotor to perform trajectory tracking tasks. J. Intell. Robot. Syst. 2019, 93, 5–16. [Google Scholar] [CrossRef]
- Jayakrishnan, H.J. Position and attitude control of a quadrotor UAV using super twisting sliding mode. IFAC Pap. Online 2016, 49, 284–289. [Google Scholar] [CrossRef]
- Xiong, J.J.; Zheng, E.H. Position and attitude tracking control for a quadrotor UAV. ISA Trans. 2014. [Google Scholar] [CrossRef]
- Nadda, S.; Swarup, A. Improved quadrotor altitude control design using second-order sliding mode. J. Aerosp. Eng. 2017, 30, 04017065. [Google Scholar] [CrossRef]
- Moawad, N.M.; Elawady, W.M.; Sarhan, A.M. Adaptive PID sliding surface-based second order sliding mode controller for perturbed nonlinear systems. In Proceedings of the 12th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 19–20 December 2017. [Google Scholar]
- González, I.; Salazar, S.; Lozano, R. Chattering-free sliding mode altitude control for a quad-rotor aircraft: Real-time application. J. Intell. Robot. Syst. 2014, 73, 137–155. [Google Scholar] [CrossRef]
- Muliadi, J.; Kusumoputro, B. Neural network control system of UAV altitude dynamics and its comparison with the PID control system. J. Adv. Trans. 2018, 1–18. [Google Scholar] [CrossRef]
- Mustapa, Z.; Saat, S.; Husin, S.H.; Abas, N. Altitude controller design for multi-copter UAV. In Proceedings of the IEEE International Conference on Computer, Communication, and Control Technology (I4CT 2014), Langkawi, Malaysia, 2–4 September 2014. [Google Scholar]
- Santos, M.F.; Pereira, V.S.; Ribeiro, A.C.; Silva, M.F.; Vidal, M.J.D.C.V.F.; Honorio, L.M.; Cerqueira, A.S.; Oliveira, E.J. Simulation and comparison between a linear and nonlinear technique applied to altitude control in quadcopters. In Proceedings of the 18th International Carpathian Control Conference (ICCC), Sinaia, Romania, 28–31 May 2017; pp. 234–239. [Google Scholar]
- Pounds, P.E.I.; Bersak, D.R.; Dollar, A.M. Stability of small-scale UAV helicopters and quadrotors with added payload mass under PID control. Auton. Robots 2012, 33, 129–142. [Google Scholar] [CrossRef]
- Salih, A.L.; Moghavvemi, M.; Mohamed, H.A.F.; Gaeid, K.F. Modelling and PID controller design for a quadrotor unmanned air vehicle. In Proceedings of the IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 28–30 May 2010. [Google Scholar]
- Li, J.; Li, Y. Dynamic analysis and PID control for a quadrotor. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011. [Google Scholar]
- Ahmed, A.H.; Ouda, A.N.; Kamel, A.M.; Elhalwagy, Y.Z. Attitude stabilization and altitude control of quadrotor. In Proceedings of the 12th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 28–29 December 2016. [Google Scholar]
- Khan, H.S.; Kadri, M.B. Attitude and altitude control of quadrotor by discrete PID control and non-linear model Predictive control. In Proceedings of the International Conference on Information and Communication Technologies (ICICT), Karachi, Pakistan, 12–13 December 2015. [Google Scholar]
- Bolandi, H.; Rezaei, M.; Mohsenipour, R.; Nemati, H.; Smailzadeh, S.M. Attitude control of a quadrotor with optimized PID controller. Intell. Control Autom. 2013, 4, 335–342. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Hong, S.K. Quadcopter robust adaptive second order sliding mode control based on PID sliding surface. IEEE Access 2018, 6, 66850–66860. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Nguyen, N.P.; Hong, S.K. Simple nonlinear control of quadcopter for collision avoidance based on geometric approach in static environment. Int. J. Adv. Robot. Syst. 2018. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Hong, S.K. Fault-tolerant control of quadcopter UAVs using robust adaptive sliding mode approach. Energies 2019, 12, 95. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Hong, S.K. Position control of a hummingbird quadcopter augmented by gain scheduling. Int. J. Eng. Res. Technol. 2018, 11, 1485–1498. [Google Scholar]
- Milhim, A.B.; Zhang, Y. Gain Scheduling based PID controller for fault tolerant control of a quad-rotor UAV. In Proceedings of the AIAA Infotech@Aerospace, Atlanta, GA, USA, 20–22 April 2010. [Google Scholar]
- Gautam, D.; Ha, C. Control of a quadrotor using a smart self-tuning fuzzy PID controller. Int. J. Adv. Robot. Syst. 2013, 10. [Google Scholar] [CrossRef]
- Goodarzi, F.; Lee, D.; Lee, T. Geometric nonlinear PID control of a quadrotor UAV on SE(3). In Proceedings of the European Control Conference (ECC), Zürich, Switzerland, 17–19 July 2013. [Google Scholar]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, 1, 116–132. [Google Scholar] [CrossRef]
- Liu, H.; Shi, P.; Chadli, M. Finite-time stability and stabilisation for a class of nonlinear systems with time-varying delay. Int. J. Syst. Sci. 2016, 47, 1433–1444. [Google Scholar] [CrossRef]
- Estrada, F.R.L.; Ponsart, J.C.; Theilliol, D.; Zhang, Y. LPV Model-based tracking control and robust sensor fault diagnosis for a quadrotor UAV. J. Intel. Robot. Syst. 2016, 84, 163–177. [Google Scholar] [CrossRef]
- Rangajeeva, S.L.M.D.; Whidborne, J.F. Linear parameter varying control of a quadrotor. In Proceedings of the 6th International Conference on Industrial and Information Systems, Peradeniya, Sri Lanka, 16–19 August 2011. [Google Scholar]
- Stojcsics, D.; Molnár, A. Autonomous takeoff and landing control for small size unmanned aerial vehicles. Comp. Inform. 2013, 32, 1117–1130. [Google Scholar]
- Feng, Y.; Zhang, C.; Baek, S.; Rawashdeh, S.; Mohammadi, A. Autonomous landing of a UAV on a moving platform using model predictive control. Drones 2018, 2, 34. [Google Scholar] [CrossRef]
- Zhou, Z.; Wang, H.; Hu, Z. Event-based time varuing formation control for multiple quadrotor UAVs with markovian switching topologies. Complexity 2018. [Google Scholar] [CrossRef]
- Qi, Y.; Zhou, S.; Kang, Y.; Yan, S. Formation control for unmanned aerial vehicles with directed and switching topologies. Int. J. Aerosp. Eng. 2016. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Wang, K.; Lu, Y. A survey of modelling and identification of quadrotor robot. Abstr. Appl. Anal. 2014, 320526. [Google Scholar] [CrossRef]
- Wang, H.; Ye, X.; Tian, Y.; Zheng, G.; Christov, N. Model-free–based terminal SMC of quadrotor attitude and position. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2519–2528. [Google Scholar] [CrossRef]
- Zhang, D.; Qi, H.; Wu, X.; Xie, Y.; Xu, J. The quadrotor dynamic modeling and indoor target tracking control method. Math. Probl. Eng. 2014. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Model predictive quadrotor control: Attitude, altitude and position experimental studies. IET Control. Theory Appl. 2012, 6, 1812–1827. [Google Scholar] [CrossRef]
- Guruganesh, R.; Bandyopadhyay, B.; Arya, H.; Singh, G.K. Design and hardware implementation of autopilot control laws for MAV using super twisting control. J. Intell. Robot. Syst. 2017, 90, 455–471. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| m | 2.0 | kg |
| 0.0121 | kg.m2 | |
| 0.0119 | kg.m2 | |
| 0.0223 | kg.m2 | |
| l | 0.23 | m |
| g | 9.81 | m/s2 |
| 7.732 (10−6) | Ns2 | |
| 1.275 (10−7) | Nms2 |
| Parameters | Value and Unit |
|---|---|
| 2.5 m/s2 | |
| k | 0.7 |
| 1.1 | |
| 0.002 | |
| 0.2 | |
| 0, 15, 12, and 10 sin (0.1t) m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xuan-Mung, N.; Hong, S.-K. Improved Altitude Control Algorithm for Quadcopter Unmanned Aerial Vehicles. Appl. Sci. 2019, 9, 2122. https://doi.org/10.3390/app9102122
Xuan-Mung N, Hong S-K. Improved Altitude Control Algorithm for Quadcopter Unmanned Aerial Vehicles. Applied Sciences. 2019; 9(10):2122. https://doi.org/10.3390/app9102122
Chicago/Turabian StyleXuan-Mung, Nguyen, and Sung-Kyung Hong. 2019. "Improved Altitude Control Algorithm for Quadcopter Unmanned Aerial Vehicles" Applied Sciences 9, no. 10: 2122. https://doi.org/10.3390/app9102122
APA StyleXuan-Mung, N., & Hong, S.-K. (2019). Improved Altitude Control Algorithm for Quadcopter Unmanned Aerial Vehicles. Applied Sciences, 9(10), 2122. https://doi.org/10.3390/app9102122